新蓝牙遥控器 设计图纸及工艺 (1)
基于单片机的蓝牙遥控窗帘设计

基于单片机的蓝牙遥控窗帘设计作者:李道龙欧阳名三来源:《安徽理工大学学报·自然科学版》2014年第03期摘要:利用手机或电脑自带蓝牙功能作为上位机控制端,将蓝牙从模块作为遥控窗帘的遥控信号接受端,接受信号后与单片机进行通信,来完成对窗帘的遥控开关、定时、显示等系统设置,由此实现了以蓝牙为依托的新型智能家居自动化遥控方式的改变。
关键词:单片机;蓝牙;无线电遥控;手机中图分类号:TP79 文献标志码:B 文章编号:1672-1098(2014)03-0064-03目前市场上的遥控窗帘数量种类日益增多,而作为家庭自动化集成设备的一部分,其遥控器与电视空调等遥控器均不通用。
由于家居自动化程度的越来越高,所以提出由手机或电脑自带蓝牙功能作为遥控器来进行控制,从而解决需要多个遥控器来对应多个家电的问题。
而本文介绍了如何利用单片机来设计蓝牙遥控窗帘。
1 基本原理通过手机或电脑的蓝牙功能发送控制信号,利用蓝牙从模块对信号进行接受,并通过串口发送给单片机。
单片机通过接收蓝牙信号,时钟信号,可以将时钟信号送到显示屏输出,并且完成定时功能,经功率放大电路输出对电机进行控制(见图1)。
2 蓝牙模块简介蓝牙HC06模块可以让使用串口的设备摆脱线缆的束缚在10米范围内实现无线串口通信。
使用该模块无需了解复杂的蓝牙底层协议,只要简单的几个步骤即可享受到无线通信的便捷。
蓝牙透传模块只有4个AT指令,分别是测试通讯,改名称,改波特率,改配对密码。
AT 指令必须从TXD,RXD信号脚设置,不能通过蓝牙信道设置。
发送AT指令的设备可以是各种类型的MCU(比如MCS51,AVR,PIC,MSP430,ARM等),也可以是电脑通过串口(PC串口接MAX232以后或者USB转串口)发送。
3 各部分功能的实现在手机或电脑控制端界面上,有许多功能性按钮,例如,当在手机按下显示屏上的“打开”按键时,手机会通过蓝牙以ASCII码的形式发送一个字符“A”,释放时会发送一个字符“a”。
实用电子DIY制作,一个无线遥控开关将你的生活变得智能化

实用电子DIY制作,一个无线遥控开关将你的生活变得智能化普及数电模电知识,科教兴国。
大家好,今天来学习315/433M频无线收发模块RXC6,教大家做一个遥控开关,用来控制家电,非常实用。
先来看实物模块长啥样:这是模块的正面图这是模块的背面图RXC6超外差带解码学习码无线接收模块,是一款性价比较高的ISM频段的接收模块,具有较高的接收灵敏度、低廉的价格,非常适合我们进行DIY制作。
此模块无需外加任何电路即可以做到无线信号输入到数据信号输出,自带数据解码电路,可轻易实现无线产品的开发。
由模块的背面图可知,从左往右数,其引脚分别是:GND(电源负极),VDD(电源正极),D3(数据输出脚),D2,D1,D0,SW(外接学习按键)。
最右边还有个焊盘(孔),这是用来焊接天线的。
RXC6共有3种输出方式:点动,自锁,互锁。
点动就是,当我们按下遥控器的按键,接收板的数据脚就有输出,松开按键,停止输出。
自锁就是,当我们按下遥控器上的按键一次,接收板的数据脚有输出,松开按键,输出不会中断,持续输出,只有我们再按一次按键,输出才会停止。
自锁输出时,4个数据脚相互独立,互不影响。
互锁就是,4个数据脚同时只能有一路输出,互相锁定,有你没我,有我没你。
那么如何改变接收板的输出方式呢?看模块的背面,有两个没有焊上的焊盘T1、T2,默认T1、T2是没有焊上的,是悬空状态,此时对应的是点动模式。
当T2焊上接地,T1悬空,那么对应的是自锁模式。
如果T2悬空,T1焊上接地,这时是互锁模式,大家可以根据自己的需求改变输出方式。
我们将T2焊上,将模块的输出方式改为自锁,接下来DIY一个无线遥控开关。
为了增加遥控距离,焊上一段大约17cm长的单芯导线。
由于这个接收模块的数据脚输出电流很小,驱动能力有限,不能直接驱动继电器,所以我们还需要给它加一级三极管放大电路,如下图:为了方便供电和安装,我们还需要给接收模块焊一个小底板,把三极管、继电器、接线端子等都安在一块板子上,总的电路连接图如下图:备齐所需元器件:焊好小底板后把接收模块插到排母上,也安在小底板上:这个无线接收模块的供电电压范围是3.3V-5.5V,考虑到其便携性,我用一节3.7V的锂电池供电。
BLE蓝牙遥控器设计方案

BLE蓝牙遥控器设计方案蓝牙低功耗(Bluetooth Low Energy,BLE)技术在无线通信领域得到广泛应用,其中一种应用就是蓝牙遥控器。
蓝牙遥控器设计方案主要包括硬件设计、软件设计和通信协议设计三部分。
硬件设计方面,蓝牙遥控器需要包含以下几个主要部件:蓝牙模块、微控制器、电源电路、按键、LED指示灯和外壳。
1. 蓝牙模块:选择一款低功耗的蓝牙模块,如Nordic Semiconductor的nRF52系列。
这些蓝牙模块具有低功耗、低成本和高性能的特点,并支持BLE协议,能够与各种智能设备进行无线通信。
2. 微控制器:选择一款适用于遥控器应用的微控制器,如STMicroelectronics的STM32系列。
这些微控制器具有低功耗、高性能和丰富的外设接口,能够实现遥控器的各种功能。
3.电源电路:设计一个稳定的供电电路,可以使用纽扣电池或者锂电池作为供电源。
在设计过程中需要考虑电池寿命和充电电路等因素。
4.按键:选择合适的按键以及相应的电路设计,确保按键的稳定性和寿命。
按键可以包括方向键、数字键、功能键等。
5.LED指示灯:设计一个或多个LED指示灯用于显示遥控器的工作状态,例如蓝牙连接状态、电池电量等。
6.外壳:设计一个符合人体工学的外壳,考虑到手持舒适性和外壳的耐用性。
在软件设计方面,蓝牙遥控器需要实现以下几个功能模块:按键扫描、蓝牙连接、数据发送和接收、指示灯控制等。
1.按键扫描:使用定时器和外部中断等方法对按键进行扫描,实现按键的检测和响应。
2.蓝牙连接:使用蓝牙模块提供的API实现蓝牙连接功能,与目标设备进行通信。
3.数据发送和接收:通过蓝牙连接,实现与目标设备之间数据的传输,例如发送遥控指令或接收设备状态信息。
4.指示灯控制:根据蓝牙连接状态、电池电量等信息控制LED指示灯的亮灭。
通信协议设计上,蓝牙遥控器需要与被控制的设备达成一致。
常见的协议包括HID(Human Interface Device)协议、GAP(Generic Access Profile)和GATT(Generic Attribute Profile)等。
教你如何自制一款遥控器,让你的项目变成遥控的!
教你如何⾃制⼀款遥控器,让你的项⽬变成遥控的!⾃从上次制作了⼀块集成了电机驱动的最⼩板之后,我就发现现在市场上⼀块便宜且功能⼜多的遥控器都没有,于是遂产⽣了⾃⼰画⼀块的念头,并且这个遥控器还可以结合着我的电机驱动板使⽤,这样⼀整套的遥控⽅案就有了,以后想做什么遥控车,遥控船,机器⼈和遥控飞机之类的项⽬的话,就可以拿来直接⽤了。
就会⽅便很多,并且便携和稳定性都会好很多,于是这次我设计了⼀个遥控器的板⼦,体积很⼩,整个版⾯只有9.6mm*4.6mm,可以称的上是掌上遥控器,并且常⽤功能都不少。
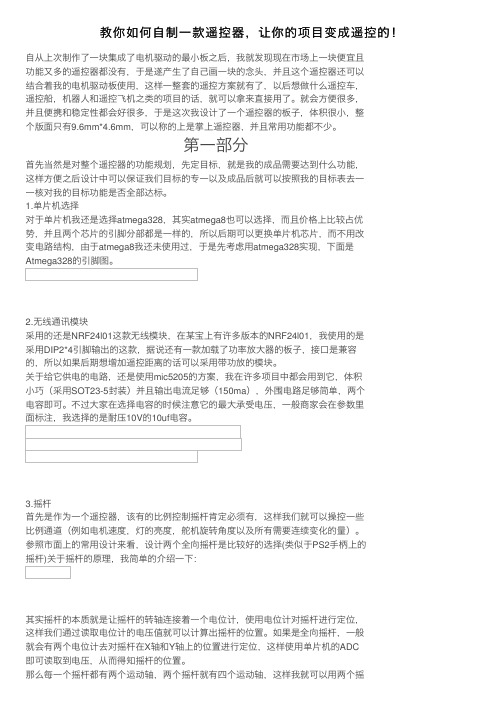
第⼀部分⾸先当然是对整个遥控器的功能规划,先定⽬标,就是我的成品需要达到什么功能,这样⽅便之后设计中可以保证我们⽬标的专⼀以及成品后就可以按照我的⽬标表去⼀⼀核对我的⽬标功能是否全部达标。
1.单⽚机选择对于单⽚机我还是选择atmega328,其实atmega8也可以选择,⽽且价格上⽐较占优势,并且两个芯⽚的引脚分部都是⼀样的,所以后期可以更换单⽚机芯⽚,⽽不⽤改变电路结构,由于atmega8我还未使⽤过,于是先考虑⽤atmega328实现,下⾯是Atmega328的引脚图。
2.⽆线通讯模块采⽤的还是NRF24l01这款⽆线模块,在某宝上有许多版本的NRF24l01,我使⽤的是采⽤DIP2*4引脚输出的这款,据说还有⼀款加载了功率放⼤器的板⼦,接⼝是兼容的,所以如果后期想增加遥控距离的话可以采⽤带功放的模块。
关于给它供电的电路,还是使⽤mic5205的⽅案,我在许多项⽬中都会⽤到它,体积⼩巧(采⽤SOT23-5封装)并且输出电流⾜够(150ma),外围电路⾜够简单,两个电容即可。
不过⼤家在选择电容的时候注意它的最⼤承受电压,⼀般商家会在参数⾥⾯标注,我选择的是耐压10V的10uf电容。
3.摇杆⾸先是作为⼀个遥控器,该有的⽐例控制摇杆肯定必须有,这样我们就可以操控⼀些⽐例通道(例如电机速度,灯的亮度,舵机旋转⾓度以及所有需要连续变化的量)。
创新设计与实践 亚超声遥控开关的设计汇总

创新设计与实践题目: 亚超声遥控开关的设计院系名称:电气工程学院专业班级:学生姓名:学号:指导教师:教师职称:讲师评语及成绩:指导教师:日期:亚超声遥控开关的设计摘要:亚超声遥控开关分为遥控发射头和接收电路两部分,亚超声遥控开关电路由亚超声发射器、亚超声接收放大器、通道译码器、双稳态触发器和继电器驱动电路组成。
亚超声遥控开关是一种介于普通的声控制开关和超声遥控开关两者之间的声控制开关,亚超声遥控开关可以应用在楼梯走道灯、台灯、收录机、电视机等家用电器设备上,它采用的声控频率为18一20,而且可利用廉价的压电陶瓷片作为发射、接收声传感器,可靠性高、辐射干扰小、操作便捷,是一种经济、实用的声控制开关。
关键词:亚超声声控制原理微分电路双稳触发前言 (4)第1章超声的发展及应用 (5)1.1 超声波的发展 (5)1.2 超声波的特点 (6)第2章亚超声遥控开关的概述 (7)2.1 亚超声的起源及其国内外的发展 (7)2.2 亚超声遥控开关的技术发展 (9)第3章亚超声遥控开关的工作原理 (10)3.1亚超声遥控开关的方案实现 (10)3.2亚超声遥控开关发射电路设计 (10)3.4电源电路设计 (11)3.5 工作原理 (11)第4章亚超声遥控开关的制作 (12)4.1 亚超声遥控开关的安装 (12)4.1.1 元器件选择 (12)4.1.2 安装制作 (13)4.1.3 调试 (13)4.2 亚超声遥控开关的实体制作 (13)参考文献 (15)附录 (16)前言声音控制电源,可以控制电视机,电风扇等200W以内的家用电器,插入插头后,再将电器插头插入声控开关,200㎡的房子都可以控制,非常方便,该遥控器根据国际先进的声光控制原理,在60平方米的房间内可随意(无线)遥控电视机,影碟机,电灯等一切家用电器开关,会给你的生活带来极大方便,不起床、不动步,轻轻一按,开关一切。
不需要拉线开关,只要用手捏一下“带嘴”的橡皮球(气囊),就可控制家用电器的“开”与“关”,达到家用电器的声控化目的。
蓝牙遥控密码锁_毕设

武汉纺织大学毕业设计[论文]题目:蓝牙遥控密码锁学院:电子与电气工程学院专业:光电信息工程**:******:**2016年6月4日摘要随着社会的发展和进步,家居智能化越来越成为未来的发展趋势。
目前市场上的电锁门禁主要采用按键的机械密码锁,一定程度上安全度不够高,且使用不够人性化。
本文设计了一种基于单片机微控制器控制的蓝牙遥控密码锁系统,能让用户通过手机控制密码锁的开关,且脱机情况下能够通过按键解锁。
本项目系统设计分为硬件和软件两部分。
硬件部分主要分为电锁控制器的主板设计和电锁受控模块的设计。
软件部分包括数据收发模块、蓝牙通信模块等。
系统实现功能主要有蓝牙远程控制功能,按键密码输入功能,干接点弱电控制功能等。
实验表明,该系统能够在手机蓝牙发送控制信号以及密码的方式下控制密码锁的开合状态,并且在蓝牙控制受限的情况下,还能够通过主机携带的按键密码输入控制密码锁的开合,具有设计成本低、可靠性高的特点,达到了设计要求。
关键词:密码锁;蓝牙收发模块;STM32F4;uCOSII系统;智能手机ABSTRACTWith the development and progress of society, intelligent household more and more to become the future development trend. At present, mechanical cipher lock is mainly to be used on the market, to a certain extent, security is not high enough, and the use of lack of humanization. This thesis present an bluetooth remote control cipher lock system based on micro-controller, which can allow users to control the password lock switch by mobile phone bluetooth, and through the keys to unlock in the offline condition. The system contains hardware module and software module. The former contains the controller of electric lock and the controlled of clectric module, and the latter contains data transmission and buletooth communication module. The mainly functions contain bluetooth remote controller, key password input, electric controller, etc. Experiments show that the system can not only be controlled by bluetooth of smart phone , but also can be controlled by key password. The system has the characteristics of low cost, high reliability, and satisfies the design requirements.Keywords: Coded Lock; Bluetooth Transceiver; STM32F4; uCOSII Syestem; Smart Phone目录1. 绪论 (1)1.1 课题意义 (1)1.2 国内外研究现状 (1)1.3 主要研究内容................. .. (2)2. 蓝牙遥控密码锁系统方案设计 (2)2.1 系统总体功能分析.. (2)2.2 系统设计流程 (3)2.3 系统功能模块设计 (3)2.4 系统工作流程 (5)3. 系统硬件设计 (6)3.1 系统模块芯片特性 (6)3.1.1 STM32F4微控制器芯片 (6)3.1.2 MP2359电源芯片. (9)3.1.3 HC05蓝牙接收芯片 (10)3.1.4 TLP521-1光耦隔离芯片 (11)3.1.5 GT9147触摸屏驱动芯片 (12)3.2 主板硬件电路设计 (12)3.2.1 STM32最小系统设计 (12)3.2.2 电源电路设计 (16)3.2.3 蓝牙接收模块 (17)3.2.4 TFT触摸屏模块 (18)3.2.5 LED驱动电路 (20)3.2.6 蜂鸣器驱动电路 (20)3.2.7 干接点输出电路 (21)3.2.8 干接点检测电路 (21)4. 系统软件设计 (22)4.1 HC05通过USART接口实现数据接收 (22)4.2 触摸屏驱动 (27)4.3 脱机键盘的C语言实现 (31)4.4 系统运行状态指示模块 (46)4.5 密码的掉电存储 (47)5. 总结 (49)参考文献 (52)致谢 (53)1 绪论1.1 课题意义在人们的日常生活中,锁被广泛使用,人们常用锁具来保证一些贵重物品乃至自己家庭的安全,目的就是为了提高安全性。
蓝牙遥控器系统的设计

统检测到这个按键已经按下 ) 秒后进行通电信号的发出这 个时候遥控器获得供电即代表已经开机 "遥控器的蓝牙握 手功能当遥控器中的蓝牙模块获得供电后其指示信号为 "H IJI-当系统 检 测 到 这 种 信 号 之 后 进 行 接 收 机 配 对 操 作 命 令 的执行否则将会自动对蓝牙进行重启 配对成功后蓝牙模 块供电后悔吐出 ##IJI- 的信号指示一经检测进行密码的发 送今儿使系统进入到对数据进行传送的模式否则将会对蓝 牙的连接继续进行等待 #遥控器的按键扫描功能这项功能 能够对键盘进行扫描当检测到键值的编码后进入到编码的 发送模式 $遥控器的键值发送功能按键位于非音量控制状 态时按键编码值通过 E@FA以 @AK编码值的格式传送给蓝牙 模块传输的波特率为 '0%% 发送成功时蓝牙模块的指示为 "GIJI- %遥控器的音量控制功能通过对音量控制键的控 制向蓝牙模块发送音量控制的指令 指令如果发送成功那 么蓝牙模块显示的指示信号为成功如果重复多次都未发送成 功后那么蓝牙模块进行自动重启 为了功放避免出现过热 应通过最大值的设定来对音量限定 &遥控器的接收音频信 号功能蓝牙模块中对数据的发送与音频接收的功能彼此之间 是独立的所以在 CDE单片机将能功率的模块放大后该接收 机能够对音频信号直接进行发送 '遥控器的警告与休眠功 能如果进行蓝牙握手的时候出现长时间的未连接的状况 CDE的蜂鸣器会收到控制发出声音进行提示 在连接建立之 后键盘如果长时间处于无动作的状态CDE将会进入休眠的 模式蓝牙模块将会自动关闭一直到按键再次被按时才会复 苏 (遥控器的断开连接自动重启功能当建立的蓝牙连接被 断开之后CDE会蓝牙模块进行控制进行重启
. Al块l进R行i自g动h重ts启R并e重s新er进v行e连d接. 的建立进而重新继续通信
蓝牙遥控车设计
蓝牙遥控车设计简介蓝牙遥控车是一种通过蓝牙技术实现远程控制的车辆。
它由车体、电机、蓝牙模块和遥控设备等组件组成。
通过蓝牙模块与遥控设备进行通信,可以实现遥控车的前进、后退、转弯等功能。
本文将详细介绍蓝牙遥控车设计的硬件和软件方面的内容。
硬件设计车体设计蓝牙遥控车的车体设计应该考虑结构稳固、轻量化和美观等因素。
常见的车体材料可以采用ABS塑料或者铝合金。
此外,车体还应该留有足够的空间来安装电机、蓝牙模块和电池等组件。
电机选择蓝牙遥控车需要两个电机来驱动车辆前后行驶。
在选择电机时,需要考虑电机的扭矩、转速和电流等参数。
通常选择直流无刷电机,其具有高效率、长寿命和快速响应的特点。
蓝牙模块蓝牙模块扮演着蓝牙遥控车中枢的角色。
它与遥控设备进行通信,接收和发送指令,控制车辆的行驶。
在选择蓝牙模块时,可以考虑 HC-05 或者 HC-06 等常见的蓝牙模块,它们具有成本低廉、易于使用和稳定性好的特点。
遥控设备遥控设备是蓝牙遥控车的控制端,主要包括按键、摇杆等控制元件。
通过按下按键或者操作摇杆,遥控设备向蓝牙模块发送指令,控制车辆的行驶。
常见的遥控设备可以采用智能手机、遥控器或者专门的蓝牙遥控器。
电池选择蓝牙遥控车的电池需要提供足够的电能来供电给车辆的电机和蓝牙模块等设备。
通常可以选择锂电池或者镍氢电池,具体选择根据项目的需求和预算来决定。
软件设计主控程序设计主控程序是蓝牙遥控车的核心,负责接收蓝牙模块发送的指令,解析指令并控制电机的运动。
主控程序可以使用Arduino、Python 或者其他嵌入式开发平台进行编写。
蓝牙通信协议设计蓝牙通信协议是蓝牙遥控车与遥控设备之间的通信规范。
通常可以定义一套简单的指令集,包括前进、后退、转弯等动作。
遥控设备通过蓝牙模块发送特定的指令给蓝牙遥控车,蓝牙遥控车解析指令并执行相应的动作。
控制算法设计控制算法决定了蓝牙遥控车的运动方式和行驶性能。
常见的控制算法可以包括差速控制、PID控制等。
可充电蓝牙智能遥控器的制作方法

本技术提供一种可充电蓝牙智能遥控器,包括防护套,机体,电池,显示屏,充电口,指示灯,智能键,扬声器,智能控制装置,蓝牙天线,蓝牙模块,防尘盖,烟雾传感器和温湿传感器,所述的防护套套在机体的外部;所述的电池安装在机体得到下侧内部;所述的电池与充电口相连;所述的显示屏镶嵌在机体的前面。
本技术的烟雾传感器、智能控制装置,蓝牙模块和电池设置,健全了遥控器的使用功能多样化,提高了设备利用率,智能化程度高,使用方便便捷,便于推广和使用。
权利要求书1.一种可充电蓝牙智能遥控器,其特征是,包括防护套(1),机体(2),电池(3),显示屏(4),充电口(5),指示灯(6),智能键(7),扬声器(8),智能控制装置(9),蓝牙天线10,蓝牙模块(11),防尘盖(12),烟雾传感器(13)和温湿传感器(14),所述的防护套(1)套在在机体(2)的外部;所述的电池(3)安装在机体(2)得到下侧内部;所述的电池(3)与充电口(5)相连;所述的显示屏(4)镶嵌在机体(2)的前面;所述的指示灯(6)设置在机体(2)的两侧面;所述的智能键(7)安装在显示屏(4)的下部;所述的扬声器(8)设置在智能键(7)的下部;所述的智能控制装置(9)安装在显示屏(4)的下部;所述的蓝牙天线(10)与蓝牙模块(11)相连;所述的防尘盖(12)扣在在充电口(5)的外侧;所述的烟雾传感器(13)或者温差传感器(14)安装在电池(3)的上部。
2.根据权利要求1所述的一种可充电蓝牙智能遥控器,其特征是,所述的电池(3)采用锂离子电池。
3.根据权利要求1所述的一种可充电蓝牙智能遥控器,其特征是,所述的充电口(5)采用USB3.0接口。
4.根据权利要求1所述的一种可充电蓝牙智能遥控器,其特征是,所述的蓝牙模块(11)包括BLE物理层模块和MCU系统芯片。
5.根据权利要求1所述的一种可充电蓝牙智能遥控器,其特征是,所述的烟雾传感器(13)采用离子式烟雾传感器;所述的烟雾传感器(13)通过无线信号与消防报警系统相连。
遥控器工作原理及电路图

遥控器工作原理及电路图1 – 1概论遥控器之基本工作原理是利用无线电发射机来传送控制资料,并由接收机将接收到之控制数据转换成控制指令,以控制天车等机器设备。
工业用无线电遥控器之要求,与一般家用或简易式遥控器有很大之差别,它不但需要有坚固耐用且具防水防尘功能的外壳,而且在电路设计上亦必须考量能够耐温抗干扰,其中更需具备多重安全防护措施,如此才能在长时间,高负荷以及恶劣的环境下安全操作。
2 – 1发射机单元工作原理控制资料图2-1 发射机流程图发射机单元主要由编码模块及发射机射频模块所组成。
当按下发射机上之按键或扳动开关时,编码模块即可感知是那个按键?是在1速或2速位置? 并将此按键之数据结合识别码及汉明码予以编码成“控制数据”(control data)后传送至发射机射频模块之调变器用以调变射频载波,调变器输出之调频信号再经射频放大器放大,低通滤波器滤波后送到天线产生发射信号。
2-1-1 编码模块工作原理图2-1-1 编码模块功能方块编码模块以微处理控制单元为核心,并包含按键电路,电源控制电路,蜂鸣器驱动电路,电气信号可抹除的只读存储器(E 2PROM )以及发射移频键等五个主要外围电路,由4~6个 1.5伏特AA 电池所组成之电源供应器供给发射机工作所需之电源,其中除了按键电路及微处理控制单元是直接至电源输入外,其余电路(包含发射机射频模块) 所需之电源均由电源控制电路依工作过程控制,以使发射机之耗电降至最低。
按键电路是用以侦测摇杆,按键(或开关)之动作,当操作摇杆,按下按键或扳动开关时,按键电路即将该按键之数据送至微处理控制单元。
微处理控制单元读取按键资料后即结合“功能设定”, “变量设定”, “识别码”, “汉明码”等数据予以编码成控制数据后,再经发射移频键电路处理产生调变信号(modulating signal )送至发射机射频模块。
微处理控制单元除了上述编码之功能外,同时亦执行自我诊断蜂鸣器7- Pins 插座至 接收机/PC/ 维护工具 (读写用)7-Pins 插座至 发射机射频模块晶体测试,当自我诊断发现故障或电源电压不正常时,即依设定之程序关机,并产生相对应之故障讯息资料送至蜂鸣器驱动器驱动蜂鸣器发出警报声及驱动双色LED 指示灯,以提醒操作人员采取必要之措施。
基于CC2541的蓝牙开锁控制器设计

DOI:10.3969/j.jssn.1009-9492.2016.z1.053基于CC2541的蓝牙开锁控制器设计文敬南、幸丹、吴志彬广东安居宝数码科技股份有限公司摘要:随着智能手机的发展,蓝牙相关应用越来越多,本文提出一种基于CC2541蓝牙soc的开锁控制器,使用智能手机进行开锁,可以做到无卡、无匙开锁。
本设计把智能手机和社区安防相结合,可以方便用户使用,加快小区门口出入速度。
关键词:电子技术,智能门锁,BLE,CC2541中图分类号:TP29 文献标识码:B 文章编号:1009-9492(2016)z1-0229-030 引言1 系统方案概述蓝牙开锁控制器主要由电源模块、门锁电路模块、门内开关模块、门磁检测电路模块和CC2541蓝牙模块组成。
其系统整体框架图如图1所示:蓝牙开锁控制器采用12V供电,CC2541蓝牙芯片与移动设备通过蓝牙BLE进行即时通信。
CC2541在接收到手机端发送的加密数据后,对该数据进行解密并与本地存储数据进行比对,通过对比结果实现对门锁的控制。
此外,蓝牙开锁控制器也可以通过读取门内开关量的状态,控制门锁实现门内按钮开门。
门磁检测电路主要用于检测门锁状态,CC2541定时扫描门磁检测电路信号输出端的门磁信号,并通过门磁信号判断当前门锁的状态。
图1 系统整体框图2 硬件方案设计图2 CC2541典型电路系统主要部分由CC2541及外围电路,电源和开锁电路构成。
CC2541是德州仪器推出的蓝牙低功耗系统单芯片(SoC),将领先RF 收发器的出色性能和一个业界标准的增强型8051 MCU、系统内可编程闪存存储器、8kBRAM 和很多其它功能强大的特性和外设组合在一起。
由于蓝牙模块自身集成了8051单片机,拥有23个通用I/O口和2个UART,在需求资源不多时可以省掉外部MCU,使用内部8051可以降低设计复杂度,加快开发速度。
蓝牙开锁控制器采用12V直流供电模式工作。
12V外部电源经过经由DC-DC开关电源芯片MP1482转换为5V电压。
毕业设计――蓝牙家电控制

毕业设计――蓝牙家电控制******学院电子信息工程系毕业设计说明书题目______________________姓名______________________学号______________________专业______________________指导教师___________________年月日摘要无线遥控(Remote Control System)在工业自动化领域有着非常广泛的应用,比如控制远端电机的启动和停止、远端指示灯的开关和控制一些电器设备的运行与终止等等,这类应用实际上都是利用信道来传输开关量信号。
利用无线电传送控制信号,对物体或各种过程进行远距离的控制。
如通过无线电传送控制信号,操纵模型飞机作出各种动作,控制导弹飞向目标,控制人造飞船进行轨道等。
通常也以为核心,传感器辅助实现发射接收。
一个运用计算机、传感、信息、通信、导航、人工智能及自动控制等技术来实现环境感知、它在军事、民用和科学研究等方面已获得了应用。
随着微电子技术、无线技术和网络技术的飞速发展以及人们生活水平的大幅度提高,人们对居住环境的安全、方便也有了越来越多以及越来越高的要求,主要体现在智能化住宅中,人们着眼于一种安全可靠、使用方便。
本设计详细地讲述了51单片机控制原理和单片机编程技术,HC-05蓝牙通信技术以及自动化控制技术。
关键词单片机蓝牙遥控家电开关智能家电第一章前言1.1课题背景随着人们生活条件的逐步提高,电视、冰箱、空调、洗衣机等诸多家用电器已经进入了千家万户,随着家用电器种类的不断增多,较早的家庭住宅设计之初对家用电器开关的预留相对较少,这就出现了要通过增加很多电源插板的方式才能满足多种家用电器的接入使用,采用外接电源插板的方式不仅存在一定的安全隐患,经常插板电源插头也极不方便,因而传统的机械式开关必将被新的科技产品所取代。
目前国内大部分家用电器开关仍旧是传统的机械式按键开关。
原因是传统式的电器开关开发周期短,制作成本低,方案成熟,因而在很长一段时间内,在国内市场上都是传统开关占据着主要的市场份额。
基于蓝牙技术的指环遥控器的系统结构与设计方案

基于蓝牙技术的指环遥控器的系统结构与设计方案蓝牙技术以通信、网络技术的快速发展为契机,凭借其安全、低消耗、低成本、稳定性高等优点,已经广泛应用于诸多领域,基于蓝牙技术的遥控器也在小规模内得到应用。
然而已存的基于蓝牙技术的遥控器并没有摆脱传统红外遥控器的功能实现方式与外形设计,并不能将蓝牙数据传输技术的优点充分发挥。
本文提出的基于此技术的指环遥控器,采用指环形的外部封装,可直接安置在用户手指上,通过手势方向进行操作。
使得遥控器在外观上有了巨大的改革,体积有了显著的缩小,并在很大程度上提高了遥控器的便利性。
1 、指环遥控器外形本遥控器总体外观为指环形,可戴于手指上,分为固定滑道和客户端控制转环;在控制转环面上设有四个按键分别是模式选择键、自定义键、增量键、减量键。
控制转环内设空腔用于嵌入蓝牙模块,陀螺仪方向感知系统,以及供电系统。
当对遥控器进行操作时,可用拇指拨动控制转环,进行按键选择并操作,还可以通过向不同方向甩动手指来进行相关的控制操作。
2 、蓝牙指环遥控器的系统结构本文提出的蓝牙指环遥控器的系统结构设计尽可能的简单,以充分发挥便捷性、即时性与环保特性。
系统结构如图1所示。
用户控制端与指令处理端均以微型可充电锂电池供电。
用户控制端采用陀螺仪传感器进行信息采集,识别用户指令,采用蓝牙传输技术进行短距离高效传输,并在指令处理端进行解码传达,执行用户指令。
2.1 用户控制及指令识别蓝牙指环遥控器启动后,用户控制端与处理端进行交互式信息式信息传输,匹配PIN 码后自动连接。
用户控制端主要采用三轴陀螺仪技术进行手势识别。
如图2 所示,三轴陀螺仪传感器利用MEMS类加速度计,在与外界物体一同运动时,内部的质量块使弹簧或阻尼器受力,输出电压变化,感知外部加速度。
陀螺仪的轴的底部以点的形式被固定,除底点之外,仍具有三向自由度。
当倾斜力作用于轴顶时,质点A、C 反向运动,质点B、D 同向运动。
AC 指点组合将使轴在运动平面内,以合适的角度运动。
遥控器外壳模具设计

遥控器外壳模具设计一塑料件设计部分1塑料的工艺分析1.1塑料成型工艺分析零件图(一)零件图(二)遥控器盖的形状较复杂,带有很多不同形状的孔,在保证孔间距和孔的形状是给模具的加工带了很大的难度。
遥控器盖的注塑材料首先选用ABS,遥控器盖绝大部分的决定了遥控器的重心的位置的所在。
所以我们必须很好多处理遥控器盖壁厚的均匀,譬如在注塑成型过程中因为壁厚的不均匀造成了收缩率的不一致,这样就只能通过有效的控制模具温度来调节收缩率。
由于遥控器盖的主体作用是起固定作用,它的内部结构就相应的给注塑带来了一定的难度。
主要是它螺钉孔的壁厚相对壁厚有一定的差距,势必会在注塑的时候到来很大的牛顿减力,造成塑件填充不满的缺陷,而且遥控器在外观上有一定的光洁度要求,最后我选择采用侧浇口对其进行浇注。
同时因为考虑到凹凸模形状的不是很复杂,才用用整体形式即可,这样不但经济而且强度与刚度可以得到保证。
1.2遥控器壳的成型特性与工艺参数丙烯腈-丁二烯-苯乙烯共聚物ABS树脂微黄色或白色不透明,是丙烯腈-丁二烯-苯乙烯共聚物。
丙烯腈使聚合物耐油,耐热,耐化学腐蚀,丁二烯使聚合物具有优越的柔性,韧性;苯乙烯赋予聚合物良好的刚性和加工流动性。
因此ABS树脂具有突出的力学性能和良好的综合性能。
同时具有吸湿性强,但原料要干燥,它的塑件尺寸稳定性好,塑件尽可能偏大的脱模斜度。
1.2.1 ABS塑料主要的性能指标:1.2.2 ABS的注射成型工艺参数:注塑机类型螺杆式料筒一区150——170料筒三区200——210喷嘴温度180——190模具温度50——70注射压60——100保压40——60注塑时间2——5保压时间5——10冷却时间5——15周期15——30后处理红外线烘箱温度702注塑设备的选择2.1计算塑件体积与质量该产品材料为ABS,查书本得知其密度为1.13-1.14g/cm3,收缩率为,计算其平均密度为1.135 g/cm3,平均收缩率为0.55﹪。
基于51单片机的手机蓝牙遥控小车设计(程序元件清单实物图)

基于51单片机的手机蓝牙遥控小车设计(程序元件清单实物图)本人一直想做一个遥控车,终于今天实现了,跟大家分享一下。
一、元件清单1、某宝购买一个智能小车底盘(本人车是四驱的,因此有四个电机,两块亚克力板和一些配件螺丝)2、L298n模块两个(一个298控制两个电机)3、HC-06蓝牙模块4、电池盒跟18650电池3个5、单片机最小系统6、杜邦线至少12根,当然越多越好7、若干根导线(连接电机用的,以及电池盒连到L298N跟单片机)二、制作过程首先,先去了解一下L298N的接线,我当时也是懵逼了好久,反正摸索着也会了,一般店家都有资料。
然后是蓝牙模块的使用,拿到蓝牙模块后,有开发板的话(没有就用单片机的烧录器),先按照TXD接TXD,RXD接RXD,打开电脑的串口助手与蓝牙构建通信,打开AT,发送AT指令集,比如设设波特率,改个名字,改个配对的密码。
但通过蓝牙与单片机连接通信的时候,就是TXD接RXD了。
最后一个就是,本人在接线的时候经常碰壁。
比如,你以为接好的线他其实没接好,根本没通,还是拿万用表B了才知道。
因为本人忘了买电池盒,所以我是用12V的直流电接着的,导致遥控车拖着跟电线。
三、实物图(拖着跟电线以及充电宝供电的车不过我没通电)资料内包括L298N的部分资料,以及蓝牙的说明书(看AT指令集就好)和源程序。
app:单片机源程序如下:1./*手机蓝牙遥控小车 APP可以在应用市场搜蓝牙串口助手2.左转右转大概是90度我的是四驱的,如果是只有一个l298N 的话就把带2的删了3.pwm有十级变速*/4.5.6.#include <reg52.h>7.8.#define Left_moto2_pwm P0_4 //接驱动模块ENA 使能端,输入PWM信号调节速度左后轮9.#define Right_moto2_pwm P0_5 //接驱动模块ENB 右后轮10.#define Left_moto_pwm P1_4 //接驱动模块ENA 使能端,输入PWM信号调节速度左前轮11.#define Right_moto_pwm P1_5 //接驱动模块ENB 右前轮12.#define uchar unsigned char13.#define uint unsigned int14.15.sbit P0_4=P0^4; //定义P0_416.sbit P0_5=P0^5; //定义P0_517.sbit P1_4=P1^4; //定义P1_418.sbit P1_5=P1^5; //定义P1_519.20./*电机驱动IO定义*/21.sbit IN1 = P1^2; //为1 左电机反转前轮22.sbit IN2 = P1^3; //为1 左电机正转前轮23.sbit IN3 = P1^6; //为1 右电机正转前轮24.sbit IN4 = P1^7; //为1 右电机反转前轮25./*sbit EN1 = P1^4; //为1 左电机使能26.sbit EN2 = P1^5; //为1 右电机使能 */27.28.sbit IN5 = P0^2; //为1 左电机反转后轮29.sbit IN6 = P0^3; //为1 左电机正转后轮30.sbit IN7 = P0^6; //为1 右电机正转后轮31.sbit IN8 = P0^7; //为1 右电机反转后轮32./*sbit EN3 = P0^4; //为1 左电机使能后轮33.sbit EN4 = P0^5; //为1 右电机使能后轮 */34.35.bit Right_moto_stop=1;36.bit Left_moto_stop =1;37.unsigned int time=0;38.int pwm=1;39.40.#define left_motor_en EN1 = 1 //左电机使能41.#define left_motor_stops EN1 = 0 //左电机停止42.#define right_motor_en EN2 = 1 //右电机使能43.#define right_motor_stops EN2 = 0 //右电机停止44.45.#define left_motor2_en EN3 = 1 //左电机使能后46.#define left_motor2_stops EN3 = 0 //左电机停止后47.#define right_motor2_en EN4 = 1 //右电机使能后48.#define right_motor2_stops EN4 = 0 //右电机停止后49.50.51.#define left_motor_go IN1 = 0, IN2 = 1//左电机正传52.#define left_motor_back IN1 = 1, IN2 = 0//左电机反转53.#define right_motor_go IN3 = 1, IN4 = 0//右电机正传54.#define right_motor_back IN3 = 0, IN4 = 1//右电机反转55.56.#define left_motor2_go IN5 = 0, IN6 = 1//左电机正传57.#define left_motor2_back IN5 = 1, IN6 = 0//左电机反转58.#define right_motor2_go IN7 = 1, IN8 = 0//右电机正传59.#define right_motor2_back IN7 = 0, IN8 = 1//右电机反转60.61.unsigned char pwm_val_left =0;//变量定义62.unsigned char push_val_left =0;// 左电机占空比N/1063.unsigned char pwm_val_right =0;64.unsigned char push_val_right=0;// 右电机占空比N/1065.66.67.void delay(uint z)68.{69.uint x,y;70.for(x = z; x > 0; x--)71.for(y = 114; y > 0 ; y--);72.}73.74.75.76.//蓝牙初始化77.void UART_INIT()78.{79.SM0 = 0;80.SM1 = 1;//串口工作方式181.REN = 1;//允许串口接收82.EA = 1;//开总中断83.ES = 1;//开串口中断84.TMOD = 0x20;//8位自动重装模式85.TH1 = 0xfd;86.TL1 = 0xfd;//9600波特率87.TR1 = 1;//启动定时器188.}89.90./************************************************************************/91.void run(void) //pwm调速函数92.{93.push_val_left =pwm; //PWM 调节参数1-10 1为最慢,10是最快改这个值可以改变其速度94.push_val_right =pwm; //PWM 调节参数1-10 1为最慢,10是最快改这个值可以改变其速度95.if(pwm==10) pwm=0;96.if(pwm==0&&pwm<0) pwm=0;97.98.}99.100.101./******************************************************** ****************/102./* PWM调制电机转速 */ 103./******************************************************** ****************/104.105.106./* 左侧电机调速 */107./*调节push_val_left的值改变电机转速,占空比 */108.void pwm_out_left_moto(void)109.{110.if(Left_moto_stop)111.{112.if(pwm_val_left<=push_val_left)113.{ Left_moto_pwm=1;114.Left_moto2_pwm=1; }115.else116.{ Left_moto_pwm=0;Left_moto2_pwm=0; }117.118.if(pwm_val_left>=10)119.pwm_val_left=0;120.}121.else { Left_moto_pwm=0;Left_moto2_pwm=0; }122.}123./******************************************************** **********/124./* 右侧电机调速 */125.void pwm_out_right_moto(void)126.{127.if(Right_moto_stop)128.{129.if(pwm_val_right<=push_val_right)130.{ Right_moto_pwm=1;131.Right_moto2_pwm=1; }132.else133.{Right_moto_pwm=0;134.Right_moto2_pwm=0;}135.if(pwm_val_right>=10)136.pwm_val_right=0;137.}138.else {Right_moto_pwm=0;Right_moto2_pwm=0; } 139.}140./***************************************************/141.///*TIMER0中断服务子函数产生PWM信号*/142.void timer0()interrupt 1 using 2143.{144.TH0=0XF8; //1Ms定时145.TL0=0X30;146.time++;147.pwm_val_left++;148.pwm_val_right++;149.pwm_out_left_moto();150.pwm_out_right_moto();151.}152.153.//小车前进154.void forward()155.{156.ET0 = 1;157.run(); //pwm 程序158.left_motor_go; //左电机前进159.right_motor_go; //右电机前进160.left_motor2_go; //左电机前进后轮161.right_motor2_go; //右电机前进后轮162.}163.164.void left_go() //左转165.{166.ET0 = 1;167.run();168.left_motor_back;169.right_motor_go;170.left_motor2_back;171.right_motor2_go;172.delay(700);173.forward();174.}175.//右转176.void right_go()177.{178.ET0 = 1;179.run();180.delay(50);181.right_motor_back;182.left_motor_go;183.right_motor2_back;184.left_motor2_go;185.delay(700);186.forward();187.}188.//小车左转圈189.void left()190.{191.ET0 = 1;192.run();193.delay(50);194.right_motor_go; // 右电机前进195.left_motor_back; // 左电机后退196.right_motor2_go; // 右电机前进197.left_motor2_back; // 左电机后退198.}199.200.//小车右转圈201.void right()202.{203.ET0 = 1;204.run();205.left_motor_go;206.right_motor_back;207.left_motor2_go;208.right_motor2_back; 209.}210.211.//小车后退212.void back()213.{214.ET0 = 1;215.run();216.left_motor_back;217.right_motor_back; 218.left_motor2_back;219.right_motor2_back; 220.}221.222.//小车停止223.void stop()224.{225.ET0 = 0;226.P1=0;227.P0=0;228.}229.230.231.//串口中断232.void UART_SER() interrupt 4 233.{234.if(RI)236.RI = 0;//清除接收标志237.switch(SBUF)238.{239.case 'g': forward(); break;//前进240.case 'b': back(); break;//后退241.case 'l': left(); break;//左转圈242.case 'r': right(); break;//右转圈243.case 's': stop(); break;//停止244.case 'z': left_go(); break;//左转行驶245.case 'y': right_go(); break;//右转行驶246.case 'p': pwm++;break; //加速247.case 'c': pwm--;break; //减速248.}249.250.}251.}252.253.void main()254.{255.TMOD=0X01;256.TH0= 0XF8; //1ms定时257.TL0= 0X30;258.TR0= 1;259.ET0= 1;260.EA = 1;261.UART_INIT();//串口初始化262.while(1);263.}264.。