同步电机数学模型地建立和仿真
三相永磁同步电机(PMSM)矢量控制建模与仿真
目录1 引言 (1)1.1 课题的背景与意义 (1)1.1.1 课题背景 (1)1.1.2 课题意义 (1)1.2 永磁电机发展概况 (1)2 机电能量转换和拉格朗日方程 (2)2.1 机电能量转换 (2)2.2 三相同步电机电磁转矩 (7)2.3 拉格朗日方程 (9)3 三相永磁同步电机的数学模型 (11)3.1 三相PMSM的基本数学模型 (11)3.2 三相PMSM的坐标变换 (13)3.2.1 Clark变换 (13)3.2.2 Park变换 (14)3.3 同步旋转坐标系下PMSM的数学模型 (14)4 三相永磁同步电机的矢量控制 (16)4.1 转速环PI调节器的参数整定 (16)4.2 电流环PI调节器的参数整定 (17)4.3 三相PMSM矢量控制系统的仿真 (19)4.3.1 仿真建模 (19)4.3.2 仿真结果分析 (22)总结 (23)参考文献 (23)三相永磁同步电机矢量控制建模与仿真摘要:永磁同步电机具有体积小、效率和功率因数高等优点,因此越来越多的应用在各种功率等级的场合。
永磁同步电机的控制是永磁同步电机应用的关键技术,永磁同步电机的结构特点使得采用矢量控制系统有很大的优势。
本文首先分析了永磁同步电机矢量控制的发展概况,然后从机电能量转换的角度出发,解释三相永磁同步电机的机电能量转换原理,推导拉格朗日运动方程。
此外,列写出永磁同步电机在三相静止坐标系和dq坐标系下的数学模型。
基于Simulink建立了转速电流双闭环矢量控制系统的仿真模型,通过对仿真结果分析,验证了永磁同步电机矢量控制系统性能的优越性。
关键词:永磁同步电机,矢量控制,Simulink1 引言1.1 课题的背景与意义1.1.1 课题背景交流电机的控制性能在磁场定向矢量控制技术提出后才有了质的飞跃。
磁场定向矢量控制技术采用的是励磁电流和转矩电流的解稱控制,兼顾磁场和转矩的控制,克服了交流电机自身耦合的缺点。
2023年度电力系统同步发电机励磁系统的建模与仿真

2023年度电力系统同步发电机励磁系统的建模与仿真随着电力系统的快速发展和电力负荷的不断增加,同步发电机在电力系统中的作用日益重要。
在发电过程中,同步发电机的励磁系统起着至关重要的作用,它不仅决定了发电机的输出功率和电压稳定度,还直接影响到电力系统的稳定性和安全性。
因此,对同步发电机励磁系统进行建模和仿真,分析其特性及优化其性能具有十分重要的实用价值和工程应用前景。
本文将针对电力系统同步发电机励磁系统的建模和仿真,从理论分析、实验研究和实际应用等角度进行探讨,并提出相应的解决方案和建议。
一、同步发电机励磁系统的基本原理同步发电机是电力系统中常用的发电设备之一,其工作原理是通过励磁系统对转子产生恒定电磁势,使得电动机的旋转速度与电网同步。
励磁系统由调节回路和发电机励磁机组成,前者用于调节励磁电流大小,后者用于产生励磁电流。
励磁机由交流电源供电,将电能转换为磁能,形成恒定的磁场,以激励转子产生电势,并与电网同步。
二、同步发电机励磁系统的建模方法同步发电机励磁系统建模方法通常采用开环和闭环两种方法。
开环方法着重考虑发电机励磁机的特性和参数,而忽略负载和电力系统的影响;闭环方法则将发电机励磁系统与负载和电力系统耦合起来,考虑更加全面的影响因素。
基于此,可以利用MATLAB等软件对同步发电机励磁系统建立模型并进行仿真。
三、同步发电机励磁系统的特性分析同步发电机励磁系统特性分析是建模和仿真的重要内容,其目的是分析系统的性能和稳定性。
特性分析主要包括励磁电路特性分析、励磁系统数学模型建立、励磁机暂态过程仿真等方面。
四、同步发电机励磁系统的优化同步发电机励磁系统的优化可以通过改变发电机励磁电路参数、控制环节参数等方式进行。
其中,提高励磁机的内部反馈控制效果,降低负载波动对励磁系统的影响,并采用先进的励磁控制算法等方法,可以显著提升系统的质量和性能。
五、同步发电机励磁系统仿真结果分析通过对同步发电机励磁系统的仿真分析,可以建立电网和发电机系统的各种工况和稳态性能参数,并提出相应的改进措施和建议。
基于matlab的同步发电机组建模与仿真
基于matlab的同步发电机组建模与仿真基于matlab的同步发电机组建模与仿真I 基于MATLAB 的同步发电机组建模与仿真摘要随着电网的规模越来越大,电力系统的运行也随之越来越复杂。
同步发电机及其控制系统作为电源是电力系统中的重要组成部分,其性能对电力系统有着极大的影响,直接关系到系统的稳定运行。
为了使电力系统安全而经济地运行,我们必须对同步发电机组特性进行深入的研究。
而同步发电机组运行是一个相当复杂的过程,其动态特性随着机组的运行状态而不断变化,所以建立机组的模型并进行仿真研究是掌握发电机动态特性,评价其各个控制系统性能的有效手段,并且对工作人员的培训和研究将起到很大的作用。
同步发电机组模型的建立将涉及到机组的机理分析,有利于从理论建模中引出新的设计方法,为优化设计提供理论依据。
本文将对同步发电机及其励磁系统、调速系统的数学模型进行研究,利用MATLAB/Simulink 搭建同步发电机组的仿真模型,建立单机无穷大系统,最后对模型进行仿真,并分析仿真结果。
关键词:电力系统;单机无穷大系统;MATLAB/Simulink;仿真;同步发电机组华北电力大学本科毕业设计(论文)摘要II SYNCHRONOUS GENERATOR UNIT MODELING AND SIMULATION BASED ON MATLAB Abstract With the enlargement of the power grid scale, the operation of the power system is becoming more and more complex. As supply unit of the system, synchronous generator and its control system plays an important part in the power system. Their performance also imposes great influence to the power system and has a direct connection with the power system stability. In order to ensure the safe and economic operation of the power system, we shall do a profound research on the synchronous generator unit characteristics. However, the operation of the synchronous generator unit is a extremely complex process. Its dynamic characteristics are subject to the changing states of the unit operation. Therefore, it is efficient to build a unit model and do simulations research to acquire the dynamic characteristics of the unit, and evaluate the performance of each control system. This will also play a great role in the staff training and researches. The building of the synchronous generator unit model will involve the mechanic analysis of the unit, do favor to deduce new designing methods from theoretical model buildingand provide theoretical basis to the optimization design. In this paper the mathematical model of the synchronous generator and its excitation system, speed regulating system will be researched; the simulation model of synchronous generator unit will be built based on MATLAB/Simulink; a single-unit infinite system will be established; finally simulate the model and verify the accuracy of the model. Key Words: Power System; Single-unit Infinite System; MATLAB/Simulink; Simulation; Synchronous Generator Unit 华北电力大学本科毕业设计(论文)目录i 目录摘要∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙IAbstract∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙II 1 绪论∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙1 1.1 课题背景和意义∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙1 1.2 电力系统仿真发展现状∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙1 1.3 本课题所完成的主要工作∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙2 2 同步发电机组数学模型∙∙∙∙∙∙4 2.1 同步发电机数学模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙4 2.1.1 同步发电机数学建模概述∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙4 2.1.2 同步发电机基本方程∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙4 2.1.3 同步发电机三阶模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙4 2.1.4 单机无穷大系统∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙7 2.2 励磁系统数学模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙8 2.2.1 同步发电机励磁自动控制系统概述∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙8 2.2.2 同步发电机励磁自动控制系统数学模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙8 2.3 调速系统数学模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10 2.3.1 同步发电机组调速控制系统概述∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙10 2.3.2 同步发电机调速系统数学模型于MATLAB 同步发电机组仿真∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙12 3.1 MATLAB 介绍∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙12 3.1.1 MATLAB/Simulink∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙12 3.1.2 常用Simulink 库模块∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙13 3.2 同步发电机组仿真的初值计算∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙14 3.3 同步发电机组仿真模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙15 3.3.1 同步发电机模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙16 3.3.2 同步发电机励磁自动控制系统仿真模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙17 3.3.3 同步发电机调速系统仿真模型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙18 3.4 系统仿真及结果分析∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙18 3.4.1 稳定运行∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙19 3.4.2 系统电压突增或突降∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙20 3.4.3 增加励磁系统给定电压∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙2 1 3.4.4 增加调速系统给定功率∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙2 3 华北电力大学本科毕业设计(论文)目录ii 3.4.5 三相突然短路∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙24 4 结论与展望∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙26 参考文献∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙27 致谢∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙28 华北电力大学本科毕业设计(论文)1 1 绪论1.1 课题背景和意义随着现代电力系统网络规模的不断扩大和电网电压等级的不断升高,电力系统规划、运行和控制的复杂性亦日益增加。
永磁同步直线伺服电机机电动力学模型的建立与仿真
2 永磁 同步直线伺服 电机 的机 电动力 学模型 :
在建立永磁 同步伺服直线电机数学模型之前 , 做如下假设 :
a . 忽略铁 心饱 和 ; b . 不 计涡 流 和磁 滞 损耗 ;
C . 动子上没有阻尼绕组 , 永磁体也没有阻尼作用; d .电动 势是 正
基金项 目: 内蒙古工业大学科学研究项 目( Z S 2 0 1 l l 5 )
作者简介 : 闫军( 1 9 7 4~) , 男, 研究方 向: 机 电动力学 。
1 l 2
内蒙古工 业大学学报
2 0 1 3年
不 变 。直线 电机 可 以是 短初 级长 次级 , 也 可 以是 长初 级短 次级 。
f
丢 ( 老 ) 一 + 差 + 差= 吲1 ‘ , 2 , - - - , m )
d( O L)
一
+
l ' 2 , …
拉格 朗 日函数 和耗 散 函数为 :
r
L=r ( q j , ) 一V ( q j ) + ( , e )一 ( , e )
闫 军 , 周 志 霞 , 武建新‘
(1 .内蒙古工业 大学 机械学院 呼和浩特 0 1 0 0 5 1 ; 2 .内蒙古工业大学 电力学 院 , 呼和浩特 0 1 0 0 5 1)
摘要: 永磁 同步 直线 伺服电机的机 电动力学系统是一个 多变量 、 非线性 、 强
耦 合的系统 。它 的理论研究 与实际应 用有一定 的难 度。应用 能量 的方 法 来解 决此类 问题 , 能达到较好的效果 。应用拉格朗 1 3一 麦克斯 韦方程建立 系统 的机电动力学模型 , 通 过 c变换将 三相 参考 系 的拉 格 朗 日 一麦克 斯
原理 结构 图如 图 1 所示。
matlab中关于永磁同步电机的仿真例子
matlab中关于永磁同步电机的仿真例子摘要:一、Matlab中永磁同步电机仿真概述二、永磁同步电机仿真模型建立1.参数设置2.控制器设计3.仿真结果分析三、SVPWM算法在永磁同步电机仿真中的应用四、案例演示:基于DSP28035的永磁同步电机伺服系统MATLAB仿真五、总结与展望正文:一、Matlab中永磁同步电机仿真概述Matlab是一款强大的数学软件,其在电机领域仿真中的应用广泛。
永磁同步电机(PMSM)作为一种高效、高性能的电机,其控制策略和性能分析在Matlab中得到了充分的体现。
利用Matlab进行永磁同步电机仿真,可以有效验证控制策略的正确性,优化电机参数,提高系统性能。
二、永磁同步电机仿真模型建立1.参数设置:在建立永磁同步电机仿真模型时,首先需要设定电机的各项参数,如电阻、电感、永磁体磁链等。
这些参数可以根据实际电机的设计值进行设置,以保证模型与实际电机的特性一致。
2.控制器设计:控制器的设计是电机仿真模型的核心部分。
常见的控制器设计包括矢量控制(也称为场导向控制,Field-Oriented Control, FOC)、直接转矩控制(Direct Torque Control, DTC)等。
在Matlab中,可以利用现有的工具箱(如PMSM T oolbox)方便地进行控制器的设计和仿真。
3.仿真结果分析:在完成控制器设计后,进行仿真实验。
通过观察电机的转速、电流、转矩等参数的变化,可以评估控制器的性能。
同时,可以利用Matlab的图像绘制功能,将仿真结果以图表的形式展示,便于进一步分析。
三、SVPWM算法在永磁同步电机仿真中的应用SVPWM(Space Vector Pulse Width Modulation)是一种用于控制永磁同步电机的有效方法。
通过在Matlab中实现SVPWM算法,可以方便地对比不同控制策略的性能。
在仿真过程中,可以观察到SVPWM算法能够有效提高电机的转矩波动抑制能力,减小电流谐波含量,从而提高电机的运行效率。
基于模糊PI控制的永磁同步电机的建模与仿真
本 文 对 永 磁 同步 电机 的正 弦 波 系 统 基 于 矢 量 控 制方 法 进 行 数 学 模 型建 立 ,在 Ma t l a b / S i mu l i n k平 台下 建 立 该 控 制 方 法 的 仿 真模 型并 进 行 仿 真 , 并对仿 真结果进行分析 , 该 模 型 的 建 立 和 分 析对 永 磁 同 步 电机 的 实 际 控 制 提 供 了新 的研 究 思 路 。
《 工业控制计算机} 2 0 1 3年 第I 控制的永磁同步电机的建模与仿真
Mo d e l i n g a n d Si mu l a t i o n Ba s e d o n F u z z y P I Ce n t r e
Abs t r ac t
Th r ou gh t h e a na l y s i s o f t h e mat h em a t i c al mo del o f t h e pe r man e n t ma gn e t s y n ch r o n ou s mo t or , c ombi n e d wi t h t he pr i n c i — pi e o f v e c t o r c on t r ol , Cr e at e t h e p er man en t m a gne t s yn ch r on ou s m o t or sp ee d c on t r ol s y s t em s i mul at i o n mo del un de r t h e
c o n t r o o l f i d= O . F o r c o n t r o l l e d o b j e c t n o n l i n e a r . t i me - v a r y i n g c h a r a c t e r i s t i c s a n d u s i n g f u z z y P I c o n t r o s l t r a t e g y , d e s i g n c o n —
一种精确的永磁同步电机数学模型及仿真模型的研究

湖北 民族学 院学报 ( 自然科 学版)
Junl f ue U ie i r a oat sN tr c neEio ) orao bi n rt f tnli ( a aSi c dt n H v s yo N i ie ul e i
映 电机的真 实情 况. 关键词 : 永磁 同步电机 ; 铁耗 ; 数学模型 ; 真模 型 ; 场定向 矢量控制 仿 磁
中图 分 类 号 :M3 1 T 5 文献标识码 : A 文 章 编 号 :0 8— 4 3 20 )3— 3 7— 4 10 82 (0 8 o 0 4 0
S u y o c r t a h m a ia o e n i l t n M o e fP S t d fAn Ac u a e M t e t lM d la d S mu a i d l M M c o o
GAO h S i—h n . ONG n—h a o g XI Yu ui
( . eate t f l tc nier gHue U i rt r ao at sE si 4 0 0 C ia 1D pr n o e r a E gnei , bi nv s yf t nl e , nh 50 , hn ; m E ci l n e i o Ni i i 4
Vo. 6 No 3 12 .
S p. 0 e 2 08
一
种 精 确 的永 磁 同步 电机 数 学 模 型 及 仿 真 模 型 的研 究
高仕红 熊云槐 ,
(. 1 湖北 民族 学 院 电气 工程 系, 湖北 恩施 4 50 4 00;
2 利 川 市 电力公 司, . 湖北 利 川 4 5 0 ) 44 0
永磁同步电动机矢量控制模型的设计与仿真
永磁同步电动机矢量控制模型的设计与仿真交流调速理论包括矢量控制和直接转矩控制。
1971年,由F.Blaschke 提出的矢量控制理论第一次使交流电机控制理论获得了质的飞跃。
矢量控制采用了矢量变换的方法,通过把交流电机的磁通与转矩的控制解耦使交流电机的控制类似于直流电动机。
矢量控制方法在实现过程中需要复杂的坐标变换,而且对电机的参数依赖性较大。
直接转矩控制是1985年Depenbrock教授在研究异步电机控制方法时提出的。
该方法是在定子坐标系下分析交流电机的数学模型,强调对电机的转矩进行直接控制,对转矩进行砰一砰控制,无需解耦,省掉了矢量旋转变换计算。
控制定子磁链而不是转子磁链,不受转子参数变化的影响,但不可避免地产生转矩脉动,低速性能较差,调速范围受到限制。
而且由于它对实时性要求高、计算量大,对控制系统微处理器的性能要求也较高。
矢量控制的基本思想是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成为产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使得两个分量互相垂直,彼此独立,然后分别进行调节。
这样交流电动机的转矩控制,从原理和特性上就和直流电动机相似了。
控制策略的选择上是PID控制,传统的数字PID控制是一种技术成熟、应用最为广泛的控制算法,其结构简单,调节方便。
1 永磁同步电机的数学模型1.1 永磁同步电机系统的结构永磁同步电机的基本组成:定子绕组、转子、机体。
定子绕组通过三相交流电,产生与电源频率同步的旋转磁场。
转子是用永磁材料做成的永磁体,它在定子绕组产生的旋转磁场的作用下,开始旋转。
1.2 坐标变换坐标变换,从数学角度看,就是将方程中原来的一组变量,用一组新的变量来代替。
线性变换是指这种新旧变量之间存在线性关系。
电动机中用到的坐标变换都是线性变换。
在永磁同步电机中存在两种坐标系,一种是固定在定子上的它相对我们是静止的,即:α,β 坐标系,它的方向和定子三相绕组的位置相对固定,它的方向定位于定子绕组 A 相的产生磁势的方向,另一种是固定在转子上的旋转坐标系,我们通常称之为 d,q 坐标,其中 d 轴跟单磁极的 N 极方向相同,即和磁力线的方向相同,q 轴超前 d 轴 90 度下图所示。
永磁同步电机数学模型建立

永磁同步电机数学模型建立永磁同步电机是一种常用的电动机类型,具有高效率、高功率密度和高控制精度等优点,在工业和交通领域得到广泛应用。
为了实现对永磁同步电机的控制和优化设计,需要建立其数学模型。
本文将介绍永磁同步电机的数学模型建立过程,并对其进行详细分析。
首先,永磁同步电机的数学模型可以分为两个部分:电磁模型和机械模型。
电磁模型描述了电机的电磁特性,包括电机的电感、电阻和磁链等参数;机械模型描述了电机的机械特性,包括电机的转动惯量、摩擦力和负载扭矩等参数。
在电磁模型中,首先需要建立电机的磁链方程。
磁链方程描述了电机的磁链与电机的电流之间的关系。
对于永磁同步电机而言,其磁链方程可以表示为:ψ= Ld * id + Lq * iq其中,ψ表示电机的磁链,Ld和Lq分别表示电机的d轴和q轴的电感,id和iq分别表示电机的d轴和q轴的电流。
接下来,需要建立电机的电流方程。
电流方程描述了电机的电流与电机的电压之间的关系。
对于永磁同步电机而言,其电流方程可以表示为:ud = R * id + ω* Lq * iq + ω* ψuq = R * iq - ω* Ld * id其中,ud和uq分别表示电机的d轴和q轴的电压,R表示电机的电阻,ω表示电机的角速度。
在机械模型中,首先需要建立电机的转动方程。
转动方程描述了电机的转动惯量与电机的转矩之间的关系。
对于永磁同步电机而言,其转动方程可以表示为:J * dω/dt = Tm - Tl - Tf其中,J表示电机的转动惯量,Tm表示电机的电磁转矩,Tl表示电机的负载转矩,Tf表示电机的摩擦转矩。
最后,需要建立电机的速度方程。
速度方程描述了电机的速度与电机的转矩之间的关系。
对于永磁同步电机而言,其速度方程可以表示为:dθ/dt = ω其中,θ表示电机的转角,ω表示电机的角速度。
通过以上的数学模型,可以对永磁同步电机进行建模和仿真,实现对电机的控制和优化设计。
在实际应用中,可以通过调节电机的电流和电压来控制电机的转矩和速度,从而实现对电机的精确控制。
大功率同步电动机的建模与仿真方法研究
o n MAT L AB / S I MUL I K.W e c o n d u c t e d t h e s i mu l a t i o n e x p e r i me n t o f s y n c h r o n o u s mo t o r ’ s s t a r t i n g p r o c e s s a n d o b —
可靠运行对企业 的安全 生产 和经济效益有着极大的影响 。 失步振荡是 同步电动机特有的 , 也 是最经 常最典型 的故
L I N K上的可视化仿真 模型 , 克 服 了传 统微 分方 程模 型太 抽 象和求解复杂 困难 的缺点 , 进行了电机起动 过程的仿真并 给 出了仿真波形 , 验证 了模 型的正确性 。
p a p e r e s t a b l i s h e d a d y n a mi c ma t h e ma t i c mo d e l b a s e d o n t h e p h y s i c a l s t r u c t u r e o f s y n c h r o n o u s mo t o r ,s i mp l i i f e d t h i s
L =
1 r
+ l
一
一
, J ms
m s
频率等于转差频率 = 一 。图 2是 同步 电动 机在两相
旋转坐标 系幽 上 的等效 电路 , 图 中各量都是折算到定子侧 了 的, 和 分别 为定 子 d轴磁链和 q 轴磁链 。
2 同步 电机动 态模 型
21 动 态 数 学 模 型
.
一
2 31 —
同步电动机 的多变量动态数学模 型 能 比较 准确地 描 述其动态特性 。同步电动机定子有 空间互 差 1 2 0 。的 A、 日、 C
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真
基于MATLABSimulinkSimPowerSystems的永磁同步电机矢量控制系统建模与仿真一、本文概述随着电力电子技术和控制理论的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效率、高功率密度和优良的调速性能,在电动汽车、风力发电、机器人和工业自动化等领域得到了广泛应用。
然而,PMSM的高性能运行依赖于先进的控制系统,其中矢量控制(Vector Control, VC)是最常用的控制策略之一。
矢量控制,也称为场向量控制,其基本思想是通过坐标变换将电机的定子电流分解为与磁场方向正交的两个分量——转矩分量和励磁分量,并分别进行控制,从而实现电机的高性能运行。
这种控制策略需要对电机的动态行为和电磁关系有深入的理解,并且要求控制系统能够快速、准确地响应各种工况变化。
MATLAB/Simulink/SimPowerSystems是MathWorks公司开发的一套强大的电力系统和电机控制系统仿真工具。
通过Simulink的图形化建模环境和SimPowerSystems的电机及电力电子元件库,用户可以方便地进行电机控制系统的建模、仿真和分析。
本文旨在介绍基于MATLAB/Simulink/SimPowerSystems的永磁同步电机矢量控制系统的建模与仿真方法。
将简要概述永磁同步电机的基本结构和运行原理,然后详细介绍矢量控制的基本原理和坐标变换方法。
接着,将通过一个具体的案例,展示如何使用Simulink和SimPowerSystems进行永磁同步电机矢量控制系统的建模和仿真,并分析仿真结果,验证控制策略的有效性。
将讨论在实际应用中可能遇到的挑战和问题,并提出相应的解决方案。
通过本文的阅读,读者可以对永磁同步电机矢量控制系统有更深入的理解,并掌握使用MATLAB/Simulink/SimPowerSystems进行电机控制系统仿真的基本方法。
永磁同步电机控制方法建模与仿真研究
永磁同步电机控制方法建模与仿真研究1. 本文概述本文旨在探讨永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的控制方法建模与仿真研究。
永磁同步电机作为现代电力驱动系统中的重要组成部分,其性能优越、控制精度高等特点使得它在电动汽车、风力发电、工业机器人等领域得到广泛应用。
随着科学技术的不断进步,对永磁同步电机的控制方法提出了更高的要求,对其进行深入研究和优化具有重要意义。
本文首先介绍了永磁同步电机的基本原理和结构特点,为后续的控制方法建模提供理论基础。
接着,文章重点阐述了永磁同步电机的控制方法,包括矢量控制、直接转矩控制等,并分析了各种控制方法的优缺点。
在此基础上,文章提出了一种基于模型预测控制的永磁同步电机控制策略,并通过仿真实验验证了该控制策略的有效性和优越性。
为了更好地理解和分析永磁同步电机的动态性能和控制效果,本文建立了永磁同步电机的数学模型,并利用MATLABSimulink等仿真工具进行了仿真研究。
仿真结果展示了不同控制方法下永磁同步电机的运行状态和性能表现,为实际工程应用提供了有益的参考。
本文通过对永磁同步电机的控制方法建模与仿真研究,深入探讨了永磁同步电机的控制策略和优化方法,为永磁同步电机的进一步应用和发展提供了理论支持和技术指导。
2. 永磁同步电机基本原理永磁同步电机(PMSM)是一种高效、高性能的电机,广泛应用于各种工业控制系统和电动汽车等领域。
其基本原理基于电机内部磁场与电流之间的相互作用,通过控制电机定子电流来实现对电机转速和转矩的精确控制。
PMSM的核心组成部分包括定子、转子和永磁体。
定子通常由多个线圈组成,这些线圈在通电时产生磁场。
转子则装配有永磁体,这些永磁体产生恒定的磁场。
当定子通电产生的磁场与转子永磁体磁场相互作用时,会产生转矩,进而驱动转子旋转。
PMSM的一个重要特性是其同步性,即电机转速与电源频率之间保持严格的同步关系。
simulink同步电机调速数学模型
simulink同步电机调速数学模型
Simulink是一个用于建立和仿真动态系统的软件,可用于建立同步电机调速的数学模型。
具体来说,可以通过以下步骤建立同步电机调速的Simulink模型:
1.打开Simulink软件,新建一个模型。
2.在Simulink库中找到并添加所需的模块,例如:电压源模块、三相电抗器
模块、三相电压测量模块、三相电流测量模块、电机模块、调速器模块等。
3.根据同步电机调速系统的数学模型,配置各模块的参数和连接方式。
4.设置仿真时间、步长等参数,并进行仿真。
5.分析仿真结果,验证模型的正确性和有效性。
需要注意的是,同步电机调速的数学模型包括电机模块、调速器模块等部分,每个部分都有其特定的数学方程和参数。
因此,在建立Simulink模型时,需要仔细考虑各部分之间的关系和参数设置,以确保模型的正确性和有效性。
同步电机模型的MATLAB仿真

同步电机模型的MATLAB仿真摘要采用电力电子变频装置实现电压频率协调控制,改变了同步电机历来的恒速运行不能调速的面貌,使它和异步电机一样成为调速电机大家庭的一员。
本文针对同步电机中具有代表性的凸极机,在忽略了一部分对误差影响较小而使算法复杂度大大增加的因素(如谐波磁势等),对其内部电流、电压、磁通、磁链及转矩的相互关系进行了一系列定量分析,建立了简化的基于abc三相变量上的数学模型,并将其进行派克变换,转换成易于计算机控制的d/q坐标下的模型。
再使用MATLAB中用于仿真模拟系统的SIMULINK 对系统的各个部分进行封装及连接,系统总体分为电源、abc/dq转换器、电机内部模拟、控制反馈四个主要部分,并为其设计了专用的模块,同时对其中的一系列参数进行了配置。
系统启动仿真后,在经历了一开始的振荡后,各输出相对于输出时间的响应较稳定。
关键词:同步电机 d/q模型 MATLAB SIMULINK 仿真。
The Simulation Platform of Synchronous Machine by MATLABAbstract:The utilization of transducer realizes the control of voltage’s frequency. It changes the situation that Synchronous Machine is always running with constant speed. Just like Asynchronous Machine, Synchronous machine can also be viewed as a member of the timing machine. This thesis intends to aim at the typical salient pole machine in Synchronous Machine. Some quantitative analysis are made on relations of salient pole machine among current, voltage, flux, flux linkage and torque, under the condition that some factors such as harmonic electric potential are ignored. These factors have less influence on error but greatly increase complexity of arithmetic. Thus, simplified mathematic model is established on the basis of a, b, c three phase variables. By the Park transformation, this model is transformed to d, q model which, is easy to be controlled by computer. Simulink is used to masking and linking all the parts of the system. The system can be divided into four main parts, namely power system, abc/dq transformation, simulation model of the machine and feedback control. Special blocks are designed for the four parts and a series of parameters in these parts are configured. The results of simulation show that each output has a satisfactory response when there is disturbance.Key Words: Synchronous Machine Simulation d/q Model MATLAB SIMULINK目录第1章引言 (1)1.1引言 (1)1.2同步电机概述 (1)1.3系统仿真技术概述 (2)1.4仿真软件的发展状况与应用 (2)1.5MATLAB概述 (2)1.6S IMULINK概述 (4)1.7小结 (5)第2章同步电机基本原理 (6)2.1理想同步电机 (6)2.2ABC/DQ模型的建立 (6)第3章仿真系统总体设计 (10)3.1系统对象 (10)3.2系统分块 (10)3.3控制反馈环节 (11)第4章仿真系统详细设计 (13)4.1总体设计 (13)4.2具体设计 (13)4.3控制反馈环节 (16)第5章系统仿真运行 (17)5.1输出结果稳定情况 (17)5.2小结 (20)第6章结论 (21)第7章致谢 (22)参考文献 (23)第1章引言1.1引言世界工业进步的一个重要因素是过去几十年中工厂自动化的不断完善。
永磁同步电机矢量控制系统建模与仿真
永磁同步电机矢量控制系统建模与仿真王涛;李勇;王青;贾克军【摘要】基于永磁同步电机具有多变量、非线性的复杂特性,为研究需要,对其物理模型进行简化,建立了电机的数学模型及其基本方程.在矢量控制众多方法中采用最为简单的使直轴电流id=0方法进行研究,得到了基于转子磁场定向矢量控制下的电机电磁转矩方程.在Matlab/Simulink搭建整个系统仿真模型、转速和电流控制模块,并对这些模块进行仿真.仿真结果表明所得波形符合理论分析,系统响应快、超调量小,系统运行稳定,具有良好的动、静态特性.该模型的建立和分析对电机的实际控制提供了新的研究思路.%Based on the complex system of Permanent Magnetic Synchronous Motor (PMSM) with multi-variable and nonlinear, in this paper, the physical model of PMSM is simplified and the mathematical model of the motor is established in order to facilitate research. This paper uses id = 0 control manner which is the simplest manner in vector control methods, motor electromagnetic torque equation is established based on rotor field oriented vector control. The system model,speed and current control block are built and simulated with Matlab/Simulink. Simulation results show that the waveform is consistent with theoretical analysis; the model has fast response and small overshoot. The system runs stably with good dynamic and static characteristics. So,the establishment and analysis of PMSM model provide a new study for its actual control.【期刊名称】《河北大学学报(自然科学版)》【年(卷),期】2011(031)006【总页数】5页(P648-652)【关键词】永磁同步电机;矢量控制;建模;仿真【作者】王涛;李勇;王青;贾克军【作者单位】河北大学质量技术监督学院,河北保定071002;北京科技大学车辆工程研究所,北京100083;河北大学质量技术监督学院,河北保定071002;河北大学质量技术监督学院,河北保定071002【正文语种】中文【中图分类】TH39永磁同步电机与励磁同步电机相比取消了励磁电源和励磁绕组,取而代之的是能够产生稳定磁场的永磁体,这就使得永磁同步电机结构更加紧凑,重量减轻,体积减小,又由于同时也取消了励磁系统的损耗,其效率、功率因数得到了很大的提高[1-2].永磁同步电机的励磁磁场由转子上的永磁体产生,按转子磁场定向的矢量控制实现类似于直流电机对转矩和转子磁链的分别控制,从而获得类似于直流电机的宽范围调速性能.随着电力电子技术和控制技术的发展,永磁同步电机具有精度高、动态性能好、调速范围大以及定位控制准确等优点,常被应用于伺服系统和高性能的调速系统,因此引起了国内外越来越多学者的广泛关注[3].本文对永磁同步电机建立数学模型得到其基本方程,对矢量控制众多控制方法中最为简单的id=0方法进行研究,在Matlab/Simulink平台下建立该控制方法的仿真模型并进行仿真,并对仿真结果进行分析.该模型的建立和分析对电机的实际控制提供了新的研究思路.1.1 永磁同步电机基本结构永磁同步电机的定子与一般交流电机的定子绕组相同,采用三相交流绕组.定子铁心由带有齿和槽的冲片叠成,在槽中嵌入交流绕组.当三相对称电流通入三相对称绕组时,在气隙中产生同步旋转磁场,为简化问题同时又不影响数学模型的精度,常作如下假设:1)气隙磁场即永磁体产生的励磁磁场和三相绕组产生的电枢反应磁场呈正弦分布,定子三相绕组磁通产生的感应电动势也呈正弦分布;2)由于永磁同步电机的气隙比较大,所以不计定子磁路的饱和和铁损;3)转子上没有阻尼绕组,永磁体没有阻尼作用[4-5].1.2 永磁同步电机基本方程将永磁同步电机模型建立在三相静止坐标系(abc坐标系)上,可得到其各绕组电压平衡方程[6-7]式中,ea,eb,ec 为永磁体磁场在a,b,c三相电枢绕组中感应的旋转电动势,Rs 为定子绕组电阻,La,Lb,Lc 为定子绕组自感,Mab,Mbc,Mca为绕组间的互感.由于转子结构不对称,将abc坐标系(三相静止坐标系)中的a,b,c三相绕组先变换到αβ坐标系(两相静止坐标系),然后再由αβ坐标系变换到dq坐标系(两相旋转坐标系)中.采用的坐标变换关系式为[8-11]得到dq坐标系上的电压方程为dq向abc转换关系如式(5)所示.式中,Ld,Lq 为定子绕组自感,id,iq 为d,q轴电流分量,Rs 为定子绕组电阻,ud,uq 为d,q轴电压分量,ωr 为转子角速度,ψf =ψfm/2,ψfm 为与定子a,b,c三相绕组交链的永磁体磁链的幅值.电机在dq坐标系中转矩方程为永磁同步电机的矢量控制方法有很多种,其中使直轴电流id=0控制是最常用的方法.此时电流矢量随负载状态的变化在q轴上移动.根据式(4),id=0时的电磁转矩为.采用该方法消除了直轴电流带来的电枢反应,电机所有电流都用来产生电磁转矩,电流控制效率得到提高,产生最大的电磁转矩.永磁同步电机矢量控制结构图1所示.根据永磁同步电机矢量控制结构图[12-15],在Matlab/Simulink中搭建仿真模型,如图2所示.本文采用永磁同步电机电流、速度的双闭环控制,如图3所示.内环为电流环,外环为速度环.将电流环看作是速度调节系统中的一个环节,其作用是提高系统的快速性,抑制电流环内部干扰,限制最大电流以保障系统安全运行,速度环的作用是增强系统抗负载扰动的能力,抑制速度波动[16].转速调节模块如图4所示.该模块由PI调节器和限幅输出模块组成.通过反复调整kp,ki参数使系统输出达到最佳状态.电流调节其实就是转矩调节模块,将转速调节器的输出电流作为转矩调节器的输入.该模块也由PI调节器和限幅输出模块组成,电流调节模型图与转速调节模型图相同[17-18].仿真参数设置:逆变器直流电源电压380V,永磁同步电机定子绕组电阻Rs=2.67Ω,d轴电感Ld=0.007H,q轴电感Lq=0.007H,极对数p=2,电机转动惯量J=0.006kg·m2.电机空载启动,启动转速给定n=3 000r/min;待系统进入稳态后在0.05s时突加Tl=6N·m的负载,仿真时间t=0.1s.仿真结果如图5a-c 所示.从图5a中可以看出电机在启动后的0.02s内转速快速上升,并在经过0.01s的波动之后迅速达到稳定状态,电机动态响应性能良好.图5b中看出0.03s之前出现很大的振荡,这是因为电机启动初期转子转速低于定子旋转磁场转速,定子磁链和永磁体磁链产生的转矩在较短的时间内起到制动作用.当牵引转矩小于制动转矩时,电机总转矩下降,从而出现振荡现象.在0.05s突加6N·m的负载时,转速、转矩均有相应响应,但经过短暂的波动之后均达到稳定状态.由于仿真过程中使用PWM逆变器供电,定子电流中出现一定的谐波分量,影响到电磁转矩,使转矩和转速均出现一定的脉动,但不影响系统的稳定性.图5c为电机的机械特性曲线,可以看出机械特性较为理想.在分析永磁同步电机数学模型的基础之上,建立了电机的数学方程,通过数学的方法去研究永磁同步电机,并在Matlab/Simulink里搭建模型并进行仿真.由电机仿真波形可以看出,系统响应快速且平稳,转速和转矩超调量非常小,系统起动后保持恒定转矩;突加扰动时系统波动较小,充分说明系统具有较好的鲁棒性.仿真结果证明了本文所提出的永磁同步电机仿真建模方法的有效性.【相关文献】[1]曾毅.变频调速控制系统的设计和维护[M].2版.济南:山东科学技术出版社,2002.[2]张铁军.永磁同步电机数字化控制系统研究[D].长沙:湖南大学,2006.[3]王成元.电机现代控制技术[M].北京:机械工业出版社,2007.[4]杨文峰,孙韶元.参数自调整模糊控制交流调速系统的研究[J].电工技术杂志,2001(9):11-13.[5]BARRERO F,GONZÁLEZ A ,TORRALBA A,et al.Speed control of induction motors using a novel fuzzy sliding mode structure[J].IEEE Transactions on Fuzzy Systems,2002,10(3):375-380.[6]薛峰,谢运祥,吴捷.直接转矩控制系统的转速估算模型及其参数补偿方法[J].电工技术学报,1998,13(5):26-30.[7]EBERHART R,KENNEDY J.A new optimizer using particl swarm theory[Z].Proceedings of Sixth International Symposium MicroMachine and Human Science,Nagoya,Japan,1995.[8]陈伯时.电力拖动自动控制系统[M].2版.北京:机械工业出版社,2001.[9]陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学,2004.[10]黄永安,马路,刘慧敏.MATLAB 7.1/Simulink 6.1建模仿真开发与高级工程应用[M].北京:清华大学出版社,2005.[11]李学文,李学军.基于SIMULINK的永磁同步电机建模与仿真[J].河北大学学报:自然科学版,2007,27(S1):28-31.[12]BOUCHIKER S,CAPOLINO G A.Vector control of a permanent magnet synchronous motor using AC matrix converter[J].IEEE Transactions on Power Electronics,1998,13(6):1089-1099.[13]沈艳霞,吴定会,李三东.永磁同步电机位置跟踪控制器及Backstepping方法建模[J].系统仿真学报,2005,17(6):1318-1321.[14]薛花,姜建国.基于EKF永磁同步电机FMRC方法的仿真研究[J].系统仿真学报,2006,18(11):3324-3327.[15]林伟杰.永磁同步电机两种磁场定向控制策略的比较[J].电力电子技术,2007,41(1):26-29.[16]LI Yong,MA Fei,CHEN Shunxin,et al.PMSM simuation for AC drive in mining dump truck[Z].The Ninth International Conference on Information and Management Sciences(IMS2010),Urumchi,2010.[17]KENNEDY J,EBERHART R.Particle swarm optimization[Z].Pro IEEE Int Conf on Neural Networks,Perth,1995.[18]钱昊,赵荣祥.永磁同步电机矢量控制系统[J].农机化研究,2006(2):90-91.。
同步电机数学模型及参数研究综述

同步电机数学模型及参数研究综述同步电机是一种重要的电机类型,它的数学模型和参数研究对于了解同步电机的运行特性,提高同步电机的效率和性能具有重要意义。
本文综述了同步电机的数学模型及参数研究,内容涵盖了相关背景、工作原理、数学建模、模型参数确定、模型验证以及模型应用等方面。
1.相关背景来说,同步电机在电力系统中有着广泛的应用,它具有体积小、重量轻,结构紧凑,动态响应快,电气噪声低、无火花,定子暂态稳定等优点。
因此,同步电机的数学模型和参数研究,已经成为当今智能电机控制课题的关键研究焦点。
2.于工作原理方面,同步电机是一种特殊的交流电动机,它可以调整定子磁场强度来达到转速调节的目的,从而实现“扭矩输出”或“位置追踪”等功能。
同步电机的核心部件包括定子磁铁、转子磁铁、定子绕组、转子绕组和绝缘系统等,它们在电机同步运行的过程中,起着不可替代的作用。
3.下来,我们转入同步电机的数学建模,数学建模是用系列的方程来描述同步电机的工作原理,这一方法可以有效地研究同步电机的动态特性与控制特性。
首先,我们可以基于微分变换建立定子磁场模型,来描述定子电流;其次,以基于电磁耦合建立转子磁场模型来描述转子磁流;最后,基于电磁力和动量定律,建立转子的动态模型来描述转子的运动特性。
4.型参数确定是同步电机数学建模的重要环节,参数确定的目的是考量电机各个部分之间的耦合,以便准确描述电机的运行特性。
首先,可以通过实验测量获得一些模型参数,包括电机定子导纳、转子导纳、定子绕组电阻、转子绕组电阻、定子磁系数等;其次,也可以使用拟合技术来确定一些无法通过实验测量的模型参数,如转子磁系数、定子线圈受磁滞特性的影响等。
5.过模型参数确定之后,下一步就是模型验证。
如何确保模型参数的准确性,以保证模型的可靠性是模型验证所要面对的重要课题。
这里,可以利用相关实验数据,来确定模型参数的准确性;可以利用特定标准,来确定模型的模拟精度;可以利用求解特定问题的方法,来确定模型的优化性能。
交流永磁同步电动机数学模型的建立与分析
交流永磁同步电动机数学模型的建立与分析1模型建立交流永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)根据转子位置可以分为内转子、外转子两种。
主要部件有机座、定子铁心、定子线圈、转子铁芯、永磁体、轴、轴承和电机端盖等,此外还包括转子支撑部件、冷却涵道、接线盒等结构。
PMSM的定子主要指定子绕组与定子铁心部分,对于常见的三相绕组,三相绕组对称分布,各相绕组轴线在空间互差120°,且通入三相绕组的电流相位依次相差120°。
PMSM的转子包括永磁体、转子铁心、转轴、轴承等。
转子提供的磁场主要是由转子铁芯上极性交替的永磁体所发出的,具体气隙平均磁密值大小以及气隙磁密波形的正弦性,主要取决于转子铁芯中永磁体的尺寸、摆放形式以及隔磁措施等因素。
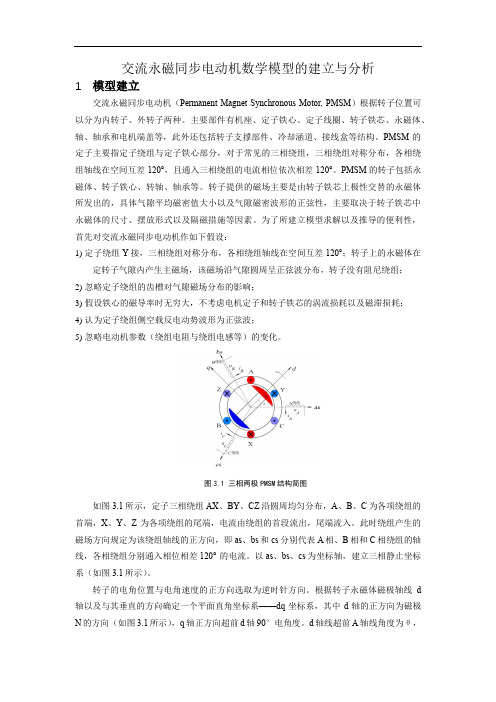
为了所建立模型求解以及推导的便利性,首先对交流永磁同步电动机作如下假设:1)定子绕组Y接,三相绕组对称分布,各相绕组轴线在空间互差120°;转子上的永磁体在定转子气隙内产生主磁场,该磁场沿气隙圆周呈正弦波分布,转子没有阻尼绕组;2)忽略定子绕组的齿槽对气隙磁场分布的影响;3)假设铁心的磁导率时无穷大,不考虑电机定子和转子铁芯的涡流损耗以及磁滞损耗;4)认为定子绕组侧空载反电动势波形为正弦波;5)忽略电动机参数(绕组电阻与绕组电感等)的变化。
图3.1 三相两极PMSM结构简图如图3.1 所示,定子三相绕组AX、BY、CZ沿圆周均匀分布,A、B、C为各项绕组的首端,X、Y、Z为各项绕组的尾端,电流由绕组的首段流出,尾端流入。
此时绕组产生的磁场方向规定为该绕组轴线的正方向,即as、bs 和cs 分别代表A 相、B 相和C 相绕组的轴线,各相绕组分别通入相位相差120° 的电流。
以as、bs、cs为坐标轴,建立三相静止坐标系(如图3.1所示)。
转子的电角位置与电角速度的正方向选取为逆时针方向。
永磁同步电机变频调速系统的建模与仿真

第 2期
移
动
电
源
与
车
辆
1 5
永 磁 同步 电机 变 频 调 速 系统 的建 模 与 仿 真
杨 秀芹 , 贺 彬 , 张 晓 杰
( 1 . 海军航空工程学 院 青 岛校 区 , 山东 青 岛 2 6 6 0 4 2 ; 2 . 9 1 4 9 8部队 , 河北 秦 皇岛 0 6 6 0 0 0 )
收 稿 日期 : 2 0 1 3 - 0 2 - 2 6
等于常数的办法 , 使电机做恒转矩运行。所以, 只要 合理的对电机的供电电压 和频率加以协调控制 , 就
可 以达 到 电动机 变频调 速 的 目的 。
作者简介 : 杨秀芹( 1 9 7 0 - ) , 女, 山东高密人 , 本科 , 主要从事飞机地面 电源保障的教学和研究工作 。
电, 三相对称 电流合成的旋转磁场 与转子永久磁钢 产生 的磁场 相互 作用 产生转矩 , 拖 动转子 同步旋 转 。
位置 传感器 实 时读 取转 子 磁 钢位 置 , 变 换 成 电 信号 控制 逆变器 开关 , 调节 电流频 率 和相位 , 使磁 势保 持 稳定 的位 置关 系 , 产生 恒定 的力矩 。
图功能、 可视化 的仿真环境 J 。使用 S i m u L i n k进行
仿真时很少需要程序 , 只需要用 鼠标完成拖拉等简
单 的操 作 , 就可 以形 象 地 建 立 起 被 研究 系 统 的数 学 模型 , 并进 行仿 真 和分析 研究 。 本 文作 者 以永磁 同步 电机 的变频 调速 系统 为研 究对象, 使用 S i m u l i n k建 立仿 真模 型 , 对 逆 变 电路及 三相桥 式整 流 电路进 行仿 真研 究 。
基于matlab永磁同步电机控制系统建模仿真方法
基于matlab永磁同步电机控制系统建模仿真方法1. 建立永磁同步电机模型
我们可以通过matlab中的Simulink工具箱建立永磁同步电机的模型,模型中包括电机本身和电机驱动系统。
该模型可以包括各种控制系统,比如位置控制、速度控制、电流控制等。
2. 设计控制系统
根据永磁同步电机的特性和实际控制需求,选定相应的控制策略。
常见的控制策略有FOC(磁场定向控制)、DTC(直接扭矩控制)等。
设计控制系统包括建立系统数学模型、设计控制算法、仿真验证等步骤。
3. 仿真实现
在matlab中进行仿真实现,根据设计的控制系统和模型参数,运行仿真程序,验证设计的控制系统的性能和功能是否符合实际控制要求,以此优化和完善控制系统。
4. 实验验证
在实验室或者实际应用场景中,进行实验验证,对控制系统进行调试和优化。
实
验验证可以通过实际硬件搭建或者仿真器件模拟等方式实现。
根据验证结果,并结合实际应用需求,对控制系统进行进一步优化和改进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同步电机数学模型的建立和仿真
姓名:包邻淋
专业:控制工程
学号:1402094
摘要 (3)
1同步电机数学模型的建立 (4)
1.1模型的导出思路 (4)
1.2变量置换用的表达式 (5)
1.4电机实用模型 (6)
1.5电机实用模型的状态空间表达式 (8)
1.6电机模型参数的确定 (10)
2 同步电机数学模型的仿真 (13)
2.1同步发电机仿真模型 (13)
2.2不同阶次模型的仿真分析 (14)
参考文献 (17)
摘要
一般发电机存在临诸多问题,建立精确地描述同步发电机的数学模型是十分必要的[1]。
电力系统数字仿真因具有不受原型系统规模和结构复杂性限制,能保证被研究系统的安全性,且具有良好的经济性、方便性等优点。
常用的同步发电机数学模型由同步发电机电路方程及转子运动方程两部分组成。
同步发电机电路方程又分为基本方程和导出模型两类[4]。
对于不同的假设条件,同步发电机模型可作不同程度的简化,因此同步发电机的导出模型也有不同的形式。
同一假设条件下,不同的同步发电机数学模型,其主要区别在于电机的转子绕组数,有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,则称之为转子7阶模型[5]。
如果转子绕组数减少,则发电机方程组的阶数也相应减少。
本文通过MATLAB/simulink进行仿真计算,比较采用不同的同步发电机模型时,对系统的稳定性分析的影响。
在此基础上提出在不同情况下进行电力系统仿真计算选取同步发电机数学模型的方法。
1同步电机数学模型的建立
1.1模型的导出思路
由于定转子间的相对运动,基于空间静止不动的三相坐标系所建立的原始方程,磁链方程式中会出现变系数,这对方程组的求解和模型的建立造成了很大的困难。
现在通用的方法是对原始方程做d q变换(又称为派克变换),将原方程从a b c三相静止不动坐标系变为与转子相对静止的d q坐标系。
基本方程中有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,若设,则原方程为5阶,若转子运动方程为,;所含变量为,。
在化为实用模型时
和保留,用取代,再用5个磁链方程消去3个转子电流,以及2个定子磁链,而
则用实用变量代替。
经过上述思路导出的实用模型,除了以及引入的等效实用变量之外方程中系数都是同步电机技术参数中的电抗和时间
常数,这些参数可以直接由电机空载短路实验所测得,无须再进行换算。
1.2变量置换用的表达式
d轴变量的置换表达式为:
由式(1-1) 得:
q轴变量的置换表达式为:
由式:
可得:
1.4电机实用模型
基于以上推导思路,可得如下方程(式中p为微分算子,下同)。
(1)定子电压方程:
(2)转子f绕组电压方程:
在实用计算中,可以近似取(此式仅在时严格成立),则式(2-3)可简化为:
(3)转子D绕组电压方程
式右边第一项中的、可通过将式代入消去,化为
的形式。
当计及绕组D,绕
组Q暂态时,在、对应的超瞬态过程中,式中项往往很小,在实用计算中式右边第一项常予以忽略。
则式可简化为:
(4)转子Q绕组电压方程
(5)转子运动方程
有的时候为近似补偿D绕组、Q绕组在动态过程中的阻尼作用以及转子运动中的机械阻尼,常在转子运动方程中补入一等效阻尼项,D为定阻尼常数,则式可改为:
另有
由上述各式构成了同步电机的7阶实用简化模型,其中
为状态变量。
需要注意的是,上述方程表示的模型并不是一个严格的七阶模型。
上述导出模型在不同的假设条件下,可以得到进一步简化。
(1)同步发电机7阶模型。
当只考虑f, D, Q绕组的电磁暂态,忽略q,d轴绕组的瞬变效应,则7阶模型简化为5阶模型。
(2)同步发电机3阶模型。
当忽略f, D, Q绕组暂态,只计及励磁绕
组厂的电磁暂态时,7阶模型简化为3阶模型。
1.5电机实用模型的状态空间表达式
本文中数字仿真采用MATLAB/simulink的基本模块实现,考虑到MATLAB求解状态空间表达式的强大运算能力,可将式(变形成如下形式:
其中前者为状态方程,后者为输出方程,状态量为
输入变量为,输出量为,
下面推导以作为输入量,作为输出量的同步发电机5阶模型的状态空间表达式。
可记为:
其中
由式(2-52)有:
记为则有将式((1-17)代入式((1-13),可得:
由式(1-17),有:
则可得到
由式(2-58),有:
即以作为输入量,作为输出量的同步发电机七阶模型的电路方程。
由上述状态方程分别构成了不同输入输出变量情况下的同步电机七阶实用模型,模型由状态空间表达式的形式进行描述,这样便于在所选软件中的建模与仿真。
有了上述两种不同形式的电机模型七阶方程,可以满足大多数情况下仿真的需1.6电机模型参数的确定
以五阶模型为例,对于所求状态方程表示的同步电机五阶模型电量方程,因为方程中的参数采用的是实用电机标么参数(如
)所以无需再进行参数转化,方程中的系数可以直接从电机的技术参数和测试结果中获得。
由表2-1,有
直轴超瞬态开路时间常数以及交轴超瞬态开路时间常数。
在没有直接给出,可以通过己有参数进行换算,也可以通过以下公式进行计算。
不难证明:
则有:
,。
,
则五阶模型参数设置如表1所示。
表1五阶模型参数
考虑所构建模型在进行仿真时,仿真的时间单位一般为秒,因此,在构建同步电机仿真模型时需要把表1中时间常数
的值化为以秒((s)为单位,根据式状态空间表达式,计算得到各系数矩阵如下:
由式上式,可算得:
C’, D’与状态空间表达式中所定义的C’, D’的略有不同,A', B', C', D’分别为表示的状态空间表达式对应的系数矩阵。
2 同步电机数学模型的仿真
2.1同步发电机仿真模型
基于式状态空间表达式以及计算得到的系数矩阵,以构建同步发电机模型,在此以5阶模型为例如图3-8所示:
其中,与原矩阵D略有差异。
为了仿真的方便,模型选用等效实用变量以及定子电流式作为输入量,定子端电压作为输出量。
将状态空间模块中矩阵A,B,C,D的值改为A’,B’,C’,D’,可得到以,作为输入量,定子电流作为输出量的同步发电机5阶仿真模型。
2.2不同阶次模型的仿真分析
在对不同阶次数学模型进行比选时,除了要考虑模型的计算量和是否易于建模分析,还需要考虑模型的精度。
本节对不同阶次模型进行简单仿真,并对仿真结果进行下面对三、五、七阶模型的仿真结果进行比较分析,以确定不同阶次模型对仿真精度的影响。
仿真模型的设置及仿真过程,下图为三、五、七阶模型的仿真结果。
图一
图二
图三
从图二不难看出,在负载发生突变的瞬间,三阶和五阶模型与七阶模型的结果有比较大的差别,特别是对于交轴电压而言,在负载加上的瞬间,七阶模型的有一个突然的跌落过程,原因是上节分析的那样,由于电机定子端电感的存在,电流不能发生突变,因此在合闸的瞬间,定子端电压瞬时值为0。
而对五阶和三阶模型而言,
因为忽略了定子绕组暂态,(即认为),所以并不能反映这种短暂而剧烈的变化。
但随着定子绕组中电流和磁场的变化逐渐趋缓,三、五、七阶模型的仿真结果非常接近,并在1秒之后变得十分接近。
图二为五阶与七阶模型直轴电压与交轴电压、的差值,上面两幅图为2~4s时‘间段的电压差值曲线,下面两幅图为2.1~4s时间段的电压差值曲线。
从图中不难看出,突加负载0.2s以后,电压差值己经很小,表明此时两种仿真模型结果己近很接近。
在五阶模型与七阶模型存在的定子电压曲线差异主要为电机负载突变时的
定子电流快速变化引起的“瞬时”差异以及电机状态稳定之后的很小误差,由于电机模型对外部网络的影响主要是定子侧的状态,因此,定子电压的这种差异也可以认为是电机模型的仿真差异,可以用来衡量电机模型的精确性。
对于三阶模型,由于忽略了阻尼绕组的阻尼作用,会对电机频繁扰动下的运行过有较大影响,这种影响相比忽略定子绕组暂态时更大,而且在某些情况下两者可能叠加,造成更大的误差。
同时因为q 轴只有一个阻尼绕组Q,所以三阶模型中的交轴分量有突变的可能性,这会降低电机模型的动态稳定性能,同时要求与模型相连的网络方程中不能出现微分项,增加了外部模型建模的难度。
参考文献
[1]施伟锋,陈子顺.船舶电力系统建模[J].中国航海,2004,3:64-69
[2]赵春峰.船舶主电力系统建模及仿真研究[[D].大连海事大学,2007,11
[3]孙才勤.船舶电力系统建模及动态稳定性研究[[D].大连海事大学,2010,4
[4]邓自力,端木君.船艇电站仿真与综合管理系统[[J].系统仿真技术,2007,3(1):45-50
[5]贺仁睦.电力系统动态仿真准确度的探究[[J].电网技术,2000,24(12):1-4
[6]苏泽光.电力系统模拟方法[fJl.中南工学院学报,2009,第14卷第3期:34-38}16}倪以信,陈寿孙,张宝霖.动态电力系统的理论和分析[M].北京:清华大学出版社,2002
[7]韩富春,门根弟.暂态稳定数字仿真中发电机数学模型的研究[[J].太原理工大学学报,2005,1:75-78。