易康精度评价
面向对象分类-

高分土地利用信息提取
• 空间分辨率的提高,提供更多的纹理、形状、上下文等空 间信息,地物看的更清晰,更便于人工目视解译
30米分辨率TM图像 传统的基于像素自动分类 方法,已不适合 面向对象影像分析与信息 2.5米分辨率SPOT5图像 提取技术
二、技术流程和核心方法
耕地 高分辨率遥感数据拥有更加丰富 地物精细识别 == 精确提取地块 的地物信息(光谱、几何、 边界 +准确确认地块属性 结构、纹理等)
规则次序流程
如图:规则窗口中显示了一个规则流程
分割和分类
• 分割:
获取影像对象的过程(像素向上合并的过程)。
• 分类:
把具有相近关系的影像对象归为一类的过程。
易康(eCognition) 分类相关概念 隶属度分类:为对象选取特征并对这些特征的值用隶属度函数进行描
述,将这些对象归为一类的过程。 隶属度函数( membership functions ):一种模糊函数。在分类 中,当完全不属于该类时,隶属度为0;完全属于时,隶属度为1.
• 1.最邻近分类器分类 – 在特征空间中计算待分类影像对象与各地类训练样本之 间的距离,寻找与待分类影像对象距离最近的样本对象, 将该待分类对象归属到最近样本对象所在的类别; – 另外,还可以以欧氏距离为测度,将距离转换为隶属度, 最终将待分类样本归属到隶属度最大的那一类。 • 2.成员函数模糊分类 – 特征模糊化(特征值——隶属度)
面向对象影像分类步骤(基于样本)
3、编辑特征空间:选择菜单“Classification -> Nearest Neighbor -> Edit Standard NN Feature Space”,双 击左边的特征列表中的特征,选择以下一些特征,如下图:
eCognition培训教材
易康(ECOGNITION)工作流程 .................................................................74
天目创新
易康(eCognition)培训教程
欢迎学习易康(eCognition)培训指南,这个培训指南有三个模块,每个模 块下的教程您都可以在指导者的帮助下练习。教程的内容是基于日常工作中 的常见问题而设计的,以易康(eCognition)关键应用和特征为范例,对完成基 本的处理提供指导。 培训指南
图 1.2 4.在 Edit Layer Mixing 对话框的底部,点击 OK 后影像会以您设置的视图 方式显示。
在这个教程中您做了以下几个步骤: 创建一个工程 导入和排序波段数据 调整视图设置
1.2 执行多尺度分割
在这个教程中,您可以学到: 设置分割参数 执行分割 显示对象轮廓
天目创新
eCognition应用
Hyperspectral CASI
7、5不同尺度分类结果统计信息集成
ID 针叶林面积
2 3 4 6 7 8
落叶林面积
950 29296 14081 16263 12432
7669
干针叶林面积
15479 12428
1722 3948 12791 29058
采伐区面积
0 350
0 631 648 2048
• 2)矢量数据:
• 外业检验并经目视解译的土地利用分类图 • 1:1万的土地利用现状图
• 3)其它资料:
与调查有关的行政区划、农、林等方面的文献资料
• 4)土地利用分类等级体系选择:
结合本次实验的目的及实验区特点,以农用地为主,选择 分类体系为2001年国土资源部发布《土地分类》试行版本, 该分类体系采用三级分类体系,其中一级地类3个、二级 地类15个、三级地类71个。
非植被 植被
Multiresolution Segmentation
不同尺度分割
像素精级影粗中分像分分割对割割象
多尺度分割——形成对象层次与邻域关系
a 对象等级结构
a 对象等级结构
b 对象层次
b 对象层次
易康的特点
• 德国易康eCognition软件面向对象的遥感影像解译思想朝 更接近人类思维模式的方向又迈进了一步,而且其解译的 精度和效率通过下面介绍的一些影像解译实际应用项目得 到了较系统客观的检验与验证;
所占百分比(%) 9.75 2.95 1.53 1.21 0.45 0.33 48.12 5.4 19.08 5.38 5.8 100
4、1 QuickBird影像城市土地利用分类
西安煤航宝鸡快鸟数据城市土地利用分类
eCognition的概论 1
eCognition的概论eCognition是北京天目创新科技有限公司代理的德国DefiniensImaging公司的遥感影像分析软件,它是人类大脑认知原理与计算机超级处理能力有机结合的产物,即计算机自动分类的速度+人工判读解译的精度,更智能,更精确,更高效地将对地观测遥感影像数据转化为空间地理信息。
eCognition突破了传统影像分类方法的局限性,提出了革命性的分类技术-面向对象分类。
eCognition分类针对的是对象而不是传统意义上的像素,充分利用了对象信息(色调,形状,纹理,层次),类间信息(与邻近对象,子对象,父对象的相关特征)。
eCognition基于Windows操作系统,界面友好简单。
与其他遥感,地理信息软件互操作性强,广泛应用于:自然资源和环境调查,农业,林业,土地利用,国防,管线管理,电信城市规划,制图,自然灾害监测,海岸带和海洋制图,地矿等方面。
面向影像对象:*面向像素的解算模式将像元孤立化分析,解译精度较低且斑点噪声难以消除;*利用影像分割技术把影像分解成具有一定相似特征的像元的集合—影像对象;*影像对象和像元相比,具有多元特征:颜色、大小、形状、匀质性等;基于对象属性特点:- 颜色信息丰富- 形状接近真实地物- 大小区分明显- 纹理信息突出- 上下文关系明确基于像素属性特点:- 基本上只以颜色信息来区分主要分类过程介绍:采用eCognition软件对影像进行分类操作非常简单,可以主要以三个步骤来形容如下:1.分割分割是面向对象分类的前提,多尺度分割是影像对象提取的专利技术,可以根据目标任务和所用影像数据的不同以任意选定的尺度分割出有意义的影像对象原型。
2.分类多尺度分割的结果是影像对象层次网络,每一层是一次分割的结果,影像对象层次网络在不同的尺度同时表征影像信息。
3.导出导出分类结果。
eCognition提供的专业分类工具包括* 多源数据融合* 多尺度分割* 基于样本的监督分类* 基于知识的模糊分类* 人工分类* 自动分类多源数据融合工具:可用来融合不同分辨率的对地观测影像数据和GIS数据,如Landsat,Spot,IRS,IKONOS, QuickBird,SAR,航空影像,LIDAR等,不同类型的影像数据和矢量数据同时参与分类。
面向对象分类实验
根据上一步的分析,在Class Hierarchy窗口中给水体添加类 的隶属度函数
由于面向对象分类过程中涉及的内容比较多,时 间和个人能力的关系,这里只做了相对简单的介绍, 有兴趣有时间的时间可以继续探讨!
课程考核汇报
1、与自己的选题和参与的项目相关; 2、要结合遥感数据处理与分析; 3、论文要完整,规范; 4、3000字以上,图文并茂。
实验完后的下周确定时间,一次性完成汇报
多尺度分割:用得最多、最有效、速度最慢的一种分割方式
光谱差异分割:影像对象域只能为对象。 多阙值分割:当需要基于绝对的像素值进行分割时使用这个算法。 对比过滤
多尺度分割
选择 算法 操作的 对象
创建对 象层
分割的参数 ,其中分割 尺度用于控 制对象内象 元的光谱差 异阈值,下 面的两个用 来控制对象 的形状特征
七、执行分类(以提取单个水体类为例) 在process tree窗口 右键—append new 选择algorithm 中选择classification,在active classes中选择
水体(可以多选),Execute. 八、精度检验 Tools->Accuracy Assessment
1、其它的地类特征空间有兴趣的大家可以自行 研究琢磨一下 由于水体和阴影的区分比较麻烦,本次实验暂不 考虑。 2、高分影像中建筑物的形态各异,提取前需要 实现对其目视分类,分别提取后合并类 3、耕地、林地以及草地的在NDVI的基础,通常 会涉及到纹理等的特征
易康手册8.0

1 简介Definiens eCognition Developer8 遵循了面向对象的影像分析方法。
针对影像自动分析,他提供了很多创新的特征和算法。
eCognition Developer8最根本的设计理念是:一,基于影像对象的方法,具备单个像素所不具备的语义信息,而语义信息是影像解译的一个重要的信息;二,具备丰富的影像对象信息和相互关系。
和基于像素的分类方法相比较,eCognition Developer8最基本的差别-不是对单个像素进行分析,而是对影像分割后生成的对象进行分析。
1.1 易康8(eCognition 8 )产品组件易康8( eCognition 8 )产品组件由三个不同的组件构成,它们可以分别单独运行,也可以集成在一起,用来解决具备挑战性的影像分析任务。
图示如下:易康8( eCognition 8 )是快速影像分析解决方案创建的功能强大的综合开发环境,在新影像分析的解决方案的快速开发上,developer8可以充分利用Definiens eCognition Developer 8 提供的基于网络认知语言环境下的开发平台和工作流程的各种工具。
开发好的解决方案可以保存,重复使用,用于在标准平台和基于Definiens eCognition 8Server分布式环境的影像自动影像分析。
eCognition Architect可以让不同行业的专家(如:植被制图专家,城市规划专家、森林覆盖分析专家等)充分利用易康的技术。
他们只需要简单的进行影像分析工作流程的构架、参数的调整和运行相应的分析功能。
Definiens eCognition 8 Server 为大量的影像分析工作提供了一个进行批处理的系统环境。
1.2 易康8(eCognition 8 )新功能描述Quickmap Mode 模式:除了传统的规则集开发模式之外,易康8提供了一种附加到快速启动模式- Quickmap Mode 模式,这种模式主要用于一些基于样本的影像分析特殊的场合,它提供了非常简化的工作流程,这个工作流程主要由基于样本对象分析的基本算法构成。
易康培训教程
单一的规则中的主要功能
算法 算法作用的影像对象域 算法参数
在影像中一个单一的规则能使一个具体的算法应用到一 个具体特定的区域,条件信息为选择特定区域的分类或合并 提供了很好的语义信息。
如图:规则窗口中显示了一个规则流程
当您用眼睛观察一个区域时,您会从特定区域周围再观察到局部, 您可能通过观察该特定区域的特殊尺寸、形状、颜色等,所有这些使 您把它和一个具体的事物联系到一起最终判定出是什么物体。
例如:
您看到的是两个圆形物体,您只能分类出是两个圆形、蓝色的物体
您会立刻把它们三者联系到一起来,左图两侧的物体为刀子和叉子 ,而中间的蓝色圆形物体为盘子。右图圆形则为车轮。
1、从菜单/文件选择Open projects 或点击Open Project按钮
2、浏览QB_Yokosuka文件夹,选择我们练习要用到的样例工程 QB_Yokosuka.dpr Yokosuka工程文件是一整景Quickbird影像的 一部分,工程过程中已经被应用在规则树中。 这个工程中包含了一个影像对象层,同时该影像对象已经被分了 类。在默认情况下一个显示影像数据的窗口以及规则树和影像对象 信息的窗口被打开。
2 .2.1 显示影像对象
浏览设置(View Settings)工具条
1、 确定浏览的图层(View Layer)是否选中按该按钮 2、 选择显示或隐藏形状(轮廓)按钮 来显示该层中所有 影像对象的形状(轮廓),从而可以判断是否与影像的 地物外形一致。 3、 显示对象的均值图,可选择对象均值图和像素图按钮
一个特征是目标对象的相关信息的表述。
eCognition (易康)1软件介绍

软件功能
图斑属性定义--分类
u 基于知识的分类方法 u 多条件类定义分类 u 隶属度函数(模糊)分类 u 分类器分类方法(5种主流方法) u 模板匹配分类方法 u 深度学习分类方法(卷积神经网络)
软件功能
成果优化--规整化
软件功能
点云分析
软件功能
时间维度--变化检测
u 前后期影像变化分析 u 前后期矢量变化分析 u 前期矢量&后期影像变化
− 目标/挑战
− 自动提取建筑轮廓并绘制植被图斑 − 支持城市规划 − 对地图快速更新 − 降低成本缩短工作周期 − 高精准度
基于数字高程模型的LIDAR影像支持的建筑 物及植被提取
农作物识别
项目需求
使用高分辨率偏振SAR数据进行 农作物种植类别分类
数据
E-SAR 分辨率2-3m 波段和极化方式:X-HH, X-VV, CVH, C-VV, L-HH, L-VV, L-HV 右图为RGB组合L-HH, C-W, L-W
eCognition是什么?
技术原理…
易康是什么?
eCognition--信息分析软件,旨在提高,加速和自动化地理空间数据的解译。
地理空间作业流程 ---从影像、点云到GIS的过程
数据获取
数据预处理
信息解译
收集
• 影像数据 • 点云数据
处理
• 几何校正 • 正射校正 • 图像融合 • 高程模型
分析
• HTML 用户界面 • 管理控制台 • 软件开发工具包
易康软件具体分析功能?
易康软件主要功能
软件功能
波段运算 分割 分类 变化检测 成果优化 点云数据处理 手动编辑 标准化分析流程制作 并行运算 矢量数据分析 …
eCognition简要介绍

易康多尺度分割参数设置
选择分割算法 〔多尺度分割〕
选择基于像 素层还是基 于对象层
选择自底向上合并 〔create below 〕or自顶向下分割 〔create above 〕尺度参数
形状权重 紧致度权重
EC分割参数选择原那么[5]
▪ 尽量以最大的可能分割尺度来区分不同的影响区域获得影像对象〔在 满足必要的精度条件下尽可能使用大尺度〕
eCognition简要介绍
本课件PPT仅供大家学习使用 学习完请自行删除,谢谢! 本课件PPT仅供大家学习使用 学习完请自行删除,谢谢! 本课件PPT仅供大家学习使用 学习完请自行删除,谢谢! 本课件PPT仅供大家学习使用 学习完请自行删除,谢谢!
发掘影像最大潜能 Exploring The Soul Of Imagery
further analysis
▪分类:label these objects according to their attributes
▪对象〔子对象,父对象,相邻对象〕 ▪对象:包含状态〔数据〕和行为〔操作〕的
集合体,用来描述真实世界的〔物理或逻辑概 念上的〕物体。
面向对象思想
▪影像〔画图表示〕 ▪影像并非由单个像素来代表,而是由包含重
人工>80
人工1(Length/width) 房屋1<=6 道路1>6
非人工<=80
非人工1(Mean Layer1) 草地1>=36 湖泊1<36
L4:100 自
底
向
L3:70
上 合
并
L2:50 分
割
房屋
道路
草地
湖泊
L1:40
Pixel Level
ecognition培训

分类 步骤
❖ 利用建好的解译标志库进行分类 ❖右击Process tree对话框,选择Append New. ❖ 在打开的对话框中,Algorithm下拉栏中选择
Classification,Image Object Domain下拉栏中选 择 image object Level,parameter中依次设定各 个参数。 ❖ 执行Execult进行分类。
❖ 它采用决策专家系统支持的模糊分类算法,突破了传统商业遥 感软件单纯基于光谱信息进行影像分类的局限性,提出了革命 性的分类技术——面向对象的分类方法,大大提高了高空间分 辨率数据的自动识别精度,有效地满足了科研和工程应用的需 求。
1.ecognition简介
❖ eCognition所采用的面向对象的信息提取方法,针对的是 对象而不是传统意义上的像素,充分利用了对象信息 (色调、形状、纹理、层次),类间信息(与邻近对象、 子对象、父对象的相关特征)。
多尺度分割原理
❖ 多尺度分割原理图:
分割流程
多尺度分割步骤
❖1.process菜单中选择process tree打开进程树控 件。
❖2.在控件中右击,选择Append new选项,打开 edit process对话框。
❖ 3.在Algorithm栏下选择所采用的分割类型。 ❖4.在对话框右栏Algorithm parameters中更改分割
2.ecognition特点
❖1 独特的面向对象分类方法; ❖2 模拟人类大脑的认知过程; ❖3 将计算机自动分类和人工信息提取相结合; ❖4 可以分析纹理和低对比度数据; ❖5 针对不同的影像数据和分类任务,进行不同尺
度的影像分割;
2.ecognition特点
❖6 快速简单的监督分类; ❖7 容易表达和分析复杂的语义任务; ❖8 模糊逻辑分类算法 eCognition可以进行基于样
应用E-Tracking技术评价不同体质量指数PCOS患者颈动脉弹性功能

应用E-Tracking技术评价不同体质量指数PCOS患者颈动脉弹性功能周漫;郑华敏;李天慧【摘要】目的应用血管回声跟踪技术(E-Tracking)探讨不同体质量指数(BMI)多囊卵巢综合征(PCOS)患者颈动脉弹性功能变化及其临床应用价值.方法选择98例PCOS患者作为研究组,按不同体质量指数(BMI)分为肥胖型PCOS组(OB-PCOS)和非肥胖型PCOS组(NOB-PCOS);同期选择55例有正常排卵的输卵管性不孕患者作为对照组.常规颈动脉超声检测内中膜厚度(IMT),应用E-Tracking技术获取颈动脉弹性指标硬化参数(β)、压力应变弹性系数(Ep)、顺应性(AC)、增大指数(AI)、单点脉搏波传导速度(PWVβ).结果 3组颈总动脉IMT比较差异无统计学意义(P>0.05);OB-PCOS组β、Ep高于对照组(P<0.05):AC低于对照组(P<0.05);AI、PWVβ均高于对照组,但差异均无统计学意义(均P>0.05);NOB-PCOS组β、Ep、AI、PWVp均高于对照组,但差异无统计学意义(均P> 0.05);AC低于对照组,但差异无统计学意义(均P>0.05).结论应用E-Tracking技术能监测不同BMI PCOS患者颈动脉弹性功能改变,为临床早期评估血管功能及针对性防治提供理论依据.【期刊名称】《现代实用医学》【年(卷),期】2016(028)003【总页数】3页(P292-294)【关键词】多囊卵巢综合征;血管回声跟踪技术;颈动脉弹性;体质量指数【作者】周漫;郑华敏;李天慧【作者单位】325000浙江省温州,温州医科大学附属第一医院;325000浙江省温州,温州医科大学附属第一医院;325000浙江省温州,温州医科大学附属第一医院【正文语种】中文【中图分类】R445.1多囊卵巢综合征(PCOS)是临床常见的一种生殖与代谢功能异常并存的内分泌紊乱的疾病,因其临床表现复杂多样、远期多种并发症引起广泛关注。
图像分类和融合中精度评价指标
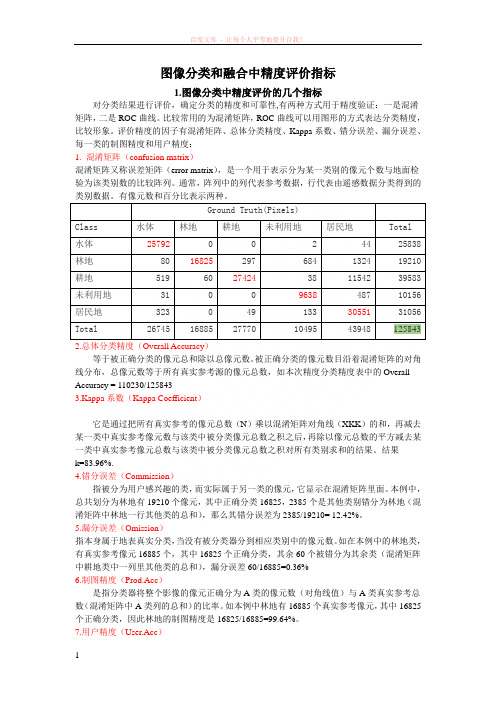
图像分类和融合中精度评价指标1.图像分类中精度评价的几个指标对分类结果进行评价,确定分类的精度和可靠性,有两种方式用于精度验证:一是混淆矩阵,二是ROC曲线。
比较常用的为混淆矩阵,ROC曲线可以用图形的方式表达分类精度,比较形象。
评价精度的因子有混淆矩阵、总体分类精度、Kappa系数、错分误差、漏分误差、每一类的制图精度和用户精度:1. 混淆矩阵(confusion matrix)混淆矩阵又称误差矩阵(error matrix),是一个用于表示分为某一类别的像元个数与地面检验为该类别数的比较阵列。
通常,阵列中的列代表参考数据,行代表由遥感数据分类得到的类别数据。
有像元数和百分比表示两种。
Ground Truth(Pixels)Class水体林地耕地未利用地居民地Total水体257920024425838林地8016825297684132419210耕地5196027424381154239583未利用地3100963848710156居民地3230491333055131056 Total26745168852777010495439481258432.总体分类精度(Overall Accuracy)等于被正确分类的像元总和除以总像元数。
被正确分类的像元数目沿着混淆矩阵的对角线分布,总像元数等于所有真实参考源的像元总数,如本次精度分类精度表中的Overall Accuracy = 110230/1258433.Kappa系数(Kappa Coefficient)它是通过把所有真实参考的像元总数(N)乘以混淆矩阵对角线(XKK)的和,再减去某一类中真实参考像元数与该类中被分类像元总数之积之后,再除以像元总数的平方减去某一类中真实参考像元总数与该类中被分类像元总数之积对所有类别求和的结果。
结果k=83.96%.4.错分误差(Commission)指被分为用户感兴趣的类,而实际属于另一类的像元,它显示在混淆矩阵里面。
eCognition(易康)软件在城市绿化覆盖调查中的应用

eCognition(易康)软件在城市绿化覆盖调查中的应用发表时间:2018-03-22T14:32:50.237Z 来源:《防护工程》2017年第32期作者:陶方李文林熊健[导读] 随着影像提取技术、遥感处理技术和计算机智能化等技术的发展,影像提取的工作将会越来越便捷、需要人工干涉的内容也会越来越少、精度也将越来越高。
江苏省地质勘查技术院江苏南京 210018摘要:城市绿化覆盖调查是结合江苏省自然地理现状、美丽江苏建设需要及政府、公众关注点的要求下开展的任务。
本论文以易康软件作为平台,在已有航天遥感影像的基础上,研究如何使用遥感影像半自动解译等方法,通过遥感影像获取与处理、城市绿化信息提取等技术,对城市建成区和中心城区开展城市绿化覆盖遥感调查,获取城市绿化覆盖解译成果及统计分析成果。
关键词:易康;高分辨率影像;多尺度分割;地物提取0引言城市绿化覆盖调查可以反映出城市绿化建设的覆盖程度,对城市绿化及生态环境以及城市生存环境可进行对比分析,得出的数据可以反应城市宜居指数,也为城市生态建设提供指引。
随着卫星数据的积累,我们虽然获取大量的高分辨率影像,但使用传统的人工矢量化方式进行生产,无法满足城市绿化覆盖调查大范围、更新快的需求。
如何减少人工编辑的工作量同时又能高效准确的提取地物信息,是目前制约着遥感技术发展的一个难题。
因此,自动、高效、准确的基于遥感影像地物提取方法已经成为遥感应用领域的主要发展方向。
本文将通过易康软件,研究如何通过高分辨率卫星影像来提取城市绿化信息。
1 eCognition(易康)软件eCognition是全球第一个基于面向对象的影像分析软件,其面向对象的影像分析方式可充分利用已有的矢量、栅格、DEM、点云等数据信息对所有类型的常用影像数据源进行智能高效的解译。
城市绿化覆盖调查的解译方案分为人工解译和自动解译。
人工解译耗时长、综合不够精确、人为主观判断因素影响过大,而全自动解译存在难度大、地物提取不够智能、工程化应用太难等弊端,因此两者结合是目前最好的解决方案。
基于卫星遥感影像的城市建筑物分类提取研究
基于卫星遥感影像的城市建筑物分类提取研究摘要遥感技术是根据电磁波的理论,应用各种传感仪器对远距离目标所辐射和反射的电磁波信息,进行收集、处理,并最后成像,从而对地面各种景物进行探测和识别的一种综合技术。
作为空间地理信息系统建设的一种有效方法,在智慧城市建设中发挥着重要作用。
文章通过应用遥感影像进行城市建筑物自动化分类提取方法的研究,为相关技术应用于智慧城市建设提供参考。
关键词:智慧城市;遥感影像;建筑物;自动化提取1.研究背景随着经济社会的高速发展,城市面貌也在发生着巨大的变化,为了更科学有效的进行城市规划、建设和管理,城市建设管理部门需要及时掌握城市建设变化情况。
在远程遥感观测技术出现之前,人们主要通过工程测量等方法来收集城市信息,进行城市规划与管理。
卫星遥感技术以其大范围、快速准确获取地面信息的优越性,越来越广泛应用于土地利用、城市规划与管理等领域。
在智慧城市建设中,对于建筑物的识别提取是极其重要的,如何识别建筑物从而更好的分类和提取也直接关系到建筑物提取的自动化程度。
此外,由于城市建设的不断发展,城市建筑物不断更新变化,因此,对建筑物进行有效的识别与提取是一个非常关键的问题,找到一种准确高效且自动化的高分遥感建筑物提取方法来替代人工方式具有重要意义。
2.研究现状目前的建筑物提取主要是通过利用图像特征信息来进行图像建筑物的识别以及提取。
这些年来,国内外的很多学者都专注于对遥感影像建筑物进行精确识别,以及在影像上提取出建筑物等信息的研究,并且提出了很多的方法和理论,也取得了一定的成果。
比如利用建筑物的位置关系对相似的建筑物进行过滤,最后通过图割算法实现对建筑物的精确提取;过Mask R-CNN算法来实现对建筑物的矢量提取;通过人工提取的方法对房屋进行提取,从而实现对建筑物房屋位置、范围等的初步自动化提取等。
在国外,Janja Avbelj and Rupert Muller提出了一种新的彩色高分辨率遥感图像建筑物提取方法。
易康阈值法分类-概述说明以及解释
易康阈值法分类-概述说明以及解释1.引言1.1 概述概述:易康阈值法分类是一种基于阈值设定的分类方法,通过设定适当的阈值来将数据分成不同的类别。
该方法广泛应用于模式识别、数据挖掘和机器学习等领域。
本文将详细介绍易康阈值法分类的原理、应用以及优势,在深入探讨该方法的实际意义和应用效果的基础上,为读者提供了解和使用易康阈值法分类的参考方向。
1.2 文章结构:本文主要分为三个部分:引言、正文和结论。
- 引言部分主要介绍了本文的背景和意义,对易康阈值法分类进行了简要概述,并明确了文章的结构和目的。
- 正文部分包括了易康阈值法分类原理、应用和优势三个小节,具体介绍了易康阈值法分类的基本原理、在实际应用中的具体场景和效果,以及相较于其他方法的优势和特点。
- 结论部分对整篇文章进行了总结,展望了易康阈值法分类在未来的发展方向和应用前景,并给出了对该方法的结论评价。
通过以上结构,读者可以全面了解易康阈值法分类的相关知识,并对其在实际应用中的价值有一个清晰的认识和理解。
整体结构严谨,逻辑清晰,便于读者理解和吸收。
1.3 目的:易康阈值法分类作为一种常见的数据分类方法,在实际应用中具有重要的意义和作用。
本文旨在深入探讨易康阈值法分类的原理、应用和优势,从而帮助读者更好地了解这一方法的工作机制和实际价值。
同时,通过分析易康阈值法分类的优点和局限性,我们还希望能够引发更多的讨论和研究,进一步推动数据分类领域的发展和创新。
最终,我们希望通过这篇文章,能够为相关领域的研究者和从业者提供一些启发和帮助,促进数据分类技术的不断进步和应用。
2.正文2.1 易康阈值法分类原理易康阈值法是一种常用的机器学习算法,主要用于分类问题。
其原理基于将数据分成不同的类别,在每个类别中寻找一个阈值,使得对于每一个数据点,当其特征值大于该阈值时属于该类别,否则不属于该类别。
这种分类方法可以简单而有效地对数据进行分类,适用于各种类型的数据。
在易康阈值法中,首先需要确定分类的类别数量。
易康精度评价

在sample editor窗口中选定对应类别,然后目视解译,在该类别上双击,样本对象生成后,变为高亮区域,每类地物选取3-5个样本,保存ttmark
Step3、进行精度评价
EC自带样本选取工具
注:
1、样本好坏影响最终结果,每种地类选取3-5个样本点。(初定)
2、精度评价之前不要做merge运算
Step1、classification->samples->sample editor
Step2、classification->samples->select samples进行样本选择
易康简单操作解析

易康简单操作解析注意:Econition是先分割再分类。
创建新工程Project:Project,浏览定位到文件夹(文件),打开,在对话框Create New Project中利用Sort 按钮左边箭头排序,Create。
调整波段显示组合:View,Layer Mixing或点击工具栏上,打开Edit Layer Mixing 对话框,在Equalizing (均衡)下拉框中选择拉伸方式(Histogram (直方图),Linear,Stedev,Gamma correction 等),一般选Histogram,在Presets下拉框中选择混合方式(One layer gray,Three layer mix,Six layer mix(六层混合)方式等),一般选Six layer mix,Ok。
图像分割Segmentation:Image Objects,Multiresolution Segmentation(多尺度分割),设置参数(Scale parameter 10(参数的大小,可得到不同大小的影像对象),Segmentation mode为Normal(分割模式可以选择Normal或Spectral difference,常用Normal),Homogeneity Criterion(均质标准)有三个:颜色,光滑度和紧致度。
Color颜色是生成有意义对象的一条重要标准。
Shape 0.3,则Color的权重值默认为0.7,Compactness 0.5,则Smoothness 0.5)(权重值Shape +Color=1,权重值Compactness +Smoothness=1),确认“Diagonal pixel neighborhood(像素领域)”is disabled,Start。
像素领域有:4领域和8领域。
选8领域可能难生成Polygons。
在Edit Layer Weight(编辑层的权重)可以选择使用Image Layers影像层和Thematic layers专题层,影像层可以视它对分割的重要性和适合度赋予权重值的高低,权重值高,分割过程就多参考它的信息,权重值为0,则在分割中就不会考虑,所有选中的影像层权重总和内部归一化为1。
econgnition9易康精度评价详细步骤
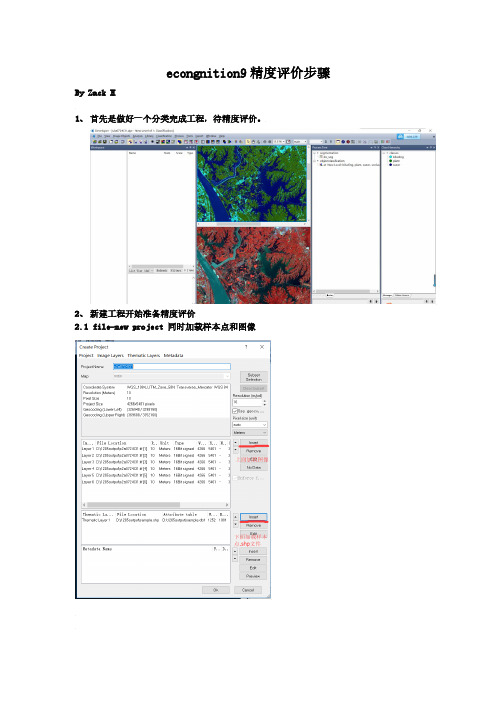
econgnition9精度评价步骤By Zack H1、首先是做好一个分类完成工程,待精度评价。
2、新建工程开始准备精度评价2.1 file-new project 同时加载样本点和图像2.2打开view-view setting,可以切换样本点和图像视图。
2.3 新建分割操作,注意分割尺度选择1000000(大于图片的像素长宽就行)。
分割完成后很难看出区别,但是仔细看,可以看到样本点,如图可以看到蓝色的样本点。
2.4 新建分类类别,名称和样本点的属性要对应。
关键步骤:先见建分类类别,再执行分类2.5 新建分类过程,这里要执行两步分类。
第一步分类在Algorithm中选择assign class by thematic layer。
第二步分类在Algorithm中选择classified image objects to sample。
2.6 将分类结果转化为样本并输出为TTA MASK。
并保存为TTA MASK;classification-sample-create TTA Mask from sample.保存TTA Mask,注意选择保存的格式:“.asc”2.7 保存工程,方便下次需要修改时使用。
3.进行精度评价3.1 打开之前分类好的待评价工程。
并加载刚刚保存的TTA Mask。
先加载“.asc”文件程序会弹出一个对话框,这是再选择“.csv”文件。
关键一步,这里选择“否”!!3.2 编辑样本对应的分类类型,classification-sample-edit conversion table点击右键,在目录中选择对应的类型。
3.3 进行精度评价。
tools-accuracy assessment选择基于TTA Mask的混淆矩阵,选择全部的分类类别。
最后点击show statistics,显示精度评价。
易康分类特征介绍
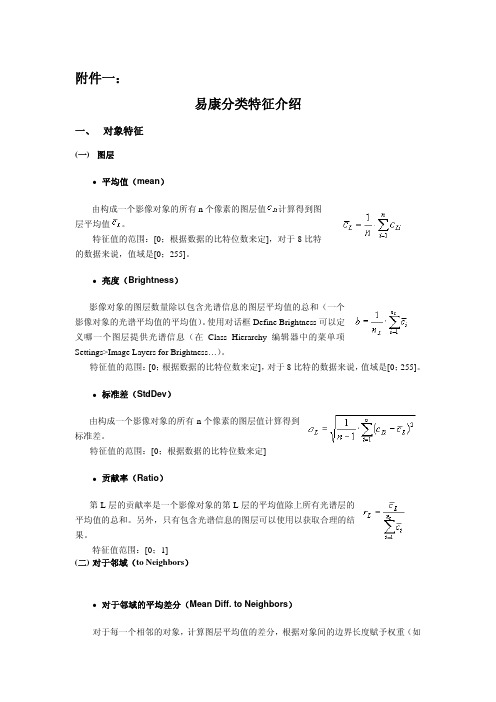
附件一:易康分类特征介绍一、 对象特征(一)图层z平均值(mean)由构成一个影像对象的所有n个像素的图层值计算得到图层平均值。
特征值的范围:[0;根据数据的比特位数来定],对于8比特的数据来说,值域是[0;255]。
z亮度(Brightness)影像对象的图层数量除以包含光谱信息的图层平均值的总和(一个影像对象的光谱平均值的平均值)。
使用对话框Define Brightness可以定义哪一个图层提供光谱信息(在Class Hierarchy编辑器中的菜单项Settings>Image Layers for Brightness…)。
特征值的范围:[0;根据数据的比特位数来定],对于8比特的数据来说,值域是[0;255]。
z标准差(StdDev)由构成一个影像对象的所有n个像素的图层值计算得到标准差。
特征值的范围:[0;根据数据的比特位数来定]z贡献率(Ratio)第L层的贡献率是一个影像对象的第L层的平均值除上所有光谱层的平均值的总和。
另外,只有包含光谱信息的图层可以使用以获取合理的结果。
特征值范围:[0;1](二)对于邻域(to Neighbors)z对于邻域的平均差分(Mean Diff. to Neighbors)对于每一个相邻的对象,计算图层平均值的差分,根据对象间的边界长度赋予权重(如果它们是直接相邻的,特征距离=0)或者根据相邻对象的面积赋予权重(如果被讨论的影像对象周围的邻域已用某一范围(像素级)来定义,特征距离>0)。
对于直接相邻对象的平均差分如下计算:所关心的影像对象的边界长度与第i个直接相邻对象共同的边界长度所关心的影像对象的图层平均值第i个相邻对象的图层平均值相邻对象的数量如果你用某一个范围内的对象来定义领域(参见特征距离(feature distance),平均差分则计算如下:所有领域对象的总面积第i领域对象的面积所关心的影像对象的图层平均值第i领域对象的图层平均值相邻对象的数量特征值的范围:[0;根据数据的比特位数来定]z对于邻域的平均差分(绝对值)(Mean Diff. to Neighbors(abs)和对于邻域的平均差分相同,不同是差分使用的是绝对值。