大学物理课件第5章
大学物理课件第五章静电场65页PPT
2、在电场的同一点上放 不同的试验电荷
结论: F 恒矢量
q0
F3
q3
F1
q1
Q
q2
F2
电场强度定义:
E
F
qo
单位:N·C-1
1. 电场强度的大小为F/q0 。
2. 电场强度的方向为正电荷在该处所受电场 力的方向。
FqE
➢ 电场强度的计算
1.点电荷电场中的电场强度
n
Fi
E i1 q0
n Fi q i 1 0
n
Ei i1
q1 r0 1
F02r02q2 F
q0
F01
若干个静止的点电荷q1、q2、……qn,同时存在时的
场强为
n
E Ei
i 1
i
qi
4 π ori2
eˆri
3.连续分布电荷电场中的电场强度
将带电体分成许多无限小电荷元 dq ,先求出它在任意
目录
第五章 第六章 第七章 第八章
静电场 静电场中的导体和电介质 恒定磁场 变化的电磁场
第五章 静电场
5-1 电荷 库仑定律 5-2 电场 电场强度 5-3 高斯定理及应用 5-4 静电场中的环路定理 电势 5-5 等势面 电势梯度
5-1 电荷 库仑定律
➢ 电荷 带电现象:物体经摩擦 后对轻微物体有吸引作 用的现象。 两种电荷: • 硬橡胶棒与毛皮摩擦后 所带的电荷为负电荷。
Qi c
电荷守恒定律适用于一切宏观和微观过程( 例如 核反应和基本粒子过程 ),是物理学中普遍的基本定
律之一。
➢ 库仑定律
库仑定律描述真空中两个静止的 点电荷之间的相互 作用力。
大学物理教程课件第五章

M
dE dE dV Cp = +p 可得: 代入上式 可得: dT dT dT
µ
CV (T2 − T1 )
dV C p = CV + p dT 利用1摩尔理想气体的状态方程 利用 摩尔理想气体的状态方程 PV=RT,将两边求微分并考 , 虑到此时的P为常量 为常量, 代入上式得: 虑到此时的 为常量,可得 PdV=RdT 或 R=PdV/dT代入上式得: 代入上式得
T1 T2
对于质量为M的工作物质 温度从 升到T 对于质量为 的工作物质,温度从 1升到 2时向外界吸收 的工作物质 温度从T 的热量为: 的热量为: M Q = νC p (T2 − T1 ) = C p (T2 − T1 )
µ
第五章 热力学
对于一般的准静态过程中系统所吸收的热量, 对于一般的准静态过程中系统所吸收的热量,可以通过对 T2 两边求得: 式dQ = νCdT 两边求得: Q = ∫ dQ = ∫ νCdT = νC (T2 − T1 )
在热传递过程中所传递的能量就称为热量。 在热传递过程中所传递的能量就称为热量。 功与热量的异同
1)过程量:与过程有关; )过程量:与过程有关;
T1 < T2
T1 Q T2
2)等效性:改变系统热运动状态作用相同; )等效性:改变系统热运动状态作用相同; 1卡 = 4.18 J , 1 J = 0.24 卡 卡 3)功与热量的物理本质不同 . )
热力学
相辅相成
气体动理论
第五章 热力学
第一节 热力学第一定律及其对理想气体的应用
一、热力学系统 热力学所研究的对象称为热力学系统,简称系统。 热力学所研究的对象称为热力学系统,简称系统。 按系统与外界的相互作用可将系统分为三类: 、 按系统与外界的相互作用可将系统分为三类:1、开放 系;2、封闭系;3、孤立系。 、封闭系; 、孤立系。 热力学平衡态:如果孤立系达到一个各种宏观性质不再随时间 热力学平衡态: 改变的状态,则这种状态就称为热力学平衡态。 改变的状态,则这种状态就称为热力学平衡态。 二.热力学过程 热力学系统的状态随时间的变化叫做热力学过程。 热力学系统的状态随时间的变化叫做热力学过程。 1、如按过程的平衡性质分,热力学过程可分为准静态过程和 、如按过程的平衡性质分, 非准静态过程。 非准静态过程。
大学物理 第五章.

时,
刚体定轴转动的 角动量守恒定律
35
§5.4 刚体的角动量定理及守恒定律
例5.6:如图,质量为M,半径为R的转台,可绕通过中心竖直轴
转动,阻力忽略不计,质量为m的人站在台的边缘,人和台原来都 静止,如果人沿转台的边缘绕行了一周,问相对地面转台转过了多 少角度?
解:把人和转台看做一个系统
系统的角动量守恒 规定:逆时针转动为正方向,以 地面为参考系。 设人的角速度为ω,转台的角速度为Ω。
或
A = ∫ Mdθ = Mθ
42
例5.9:一质量为m,长为 l的匀质杆,两端用绳悬挂杆处于水平 状态,现突然将杆右端的悬线剪断,求(1)此瞬间另一根绳受到 的张力 ;(2)剪断绳子之后任一时刻杆的角速度 ω与转过角度 θ之 间的关系。 解: (1)首先考虑杆绕O点的的转动 根据转动定律: T O
匀变速运动
6
§5.1 刚体及其定轴转动描述
例5.1:一汽车发动机的转速在5s内由200r(转)/min均匀地增加 到3000r(转)/min。(1)求在这段时间内的初角速度、末角速 度和角加速度;(2)求这段时间内转过的角度;(3)发动机轴 上装有一半径为R=0.15m的飞轮,求轮边缘上一点在这第5s末的 切向加速度、法向加速度和总加速度。
24
§5.3 刚体转动的功和能
回顾: 质点 质量 牛顿运动定律
M = Jβ
刚体 转动惯量 转动定律
力做功
力矩做功
25
§5.3 刚体转动的功和能
一、力矩的功
轴
dθ dr α r
α
F 在转动平面内
ω
元功: dA = F • dr = F dr cos α = F ( rdθ ) cos α F ( r cos α )dθ = Mdθ
大学物理课件 第五章-1
三. 波的特征量
1.波速u
概念:振动状态传播的速度 由媒质的性质决定与波源情况无关。
弹性媒质中u
波速
பைடு நூலகம்模量 密度
波速仅仅取 决于媒质的 弹性和惯性
模密
量 度
横波 纵波
固体:u G
柔绳:u
T
T : 绳张力 : 线密度
固体:u Y
液气:u B
12
2. 周期T: 一个完整的波通过波线上的某点所需的时间。
(x-
xo)] x0 }
结论:确定波动方程的二个条件 1. 已知u
2. 波线上一点的振动方程
18
三、波动方程物理意义(正向传播波为例)
y
A
cos[
(t
x u
)
0
]
1. 在空间某位置 x = x1,有
2. 它在表某示时y 刻x A=tco=xs1t1处ω,的t有振xu1动 函o数 ,A其cos中ωtooux1ω为ux1初 相。
2 T
14
§5-3平面简谐波
一、平面简谐波概念 所有质点作谐振且波面为平面的波
二、平面简谐波的波动方程:y=f(x,t)
描述媒质中各质点位移y随各点平衡位置x和时间t变化 的函数关系
平面简谐波,在无吸收的、
均匀无限大介质中传播。
源
以坐标原点O点为参考点
y
则O点处质点的振动方程为 A
u
y0 Acos(t 0 )
因媒质各部分间的弹性联系,会使振动传播开去,
这就形成了波动 — 机械波
4
“上游”的质元依次带动“下游”的质元振动。 质元的振动状态将在较晚时刻于“下游”出现。
波动是振动状态的传播,不是媒质的传播。
大学物理教学课件1-第5章.ppt

视为车轮轴在垂直轴方向的平动和绕车轮轴的转动的叠加。
二、刚体定轴转动的角量描述 定轴转动只有两个转动方向。 规定沿 ox 轴逆时针转动为正方向,反之为负方向。
•
当t = 2s 时 a n 0 .1 (1 2 2 2 )2 2.3 4 (m 02 )/s
at 0.12 4 24.8(m2)/s
2)加速度与半径成450时有 tg45at /an1
即 1.44t42.4t
t0.55 s ( 舍去 t = 0 和 t = - 0.55 )
此时砂轮的角位置: (24t3)240.535 2.6(7rad
1R4 1m R2
2
2
例题5-4 求长为L、质量为m 的均匀细棒对图中不同轴的 转动惯量。
解 1)取A 点为坐标原点。在距A 点为x 处取dm= λdx 。
d Jx 2d m x 2 d x A
JA
Lx2dxm2L
0
3
A
2)取C 点为坐标原点。
在距C 点为x 处取dm 。
xd m
L
C xd m
1 t2
2
0 t
2
2 0
2 (
0)
A
角量与线量的关系:
s r , v r
at r , an r 2
y
P•
r
•P
O
S
•
a r 2 4
线速度与角 速度之间的矢量关系为:
v r
o r
A
x
v
例题5-1一半径为R = 0.1m 的砂轮作定轴转动,其角位置随时
大学物理课件Chapter5

称为能流密度
u
J
u
u
波的强度
I J 1
T
u
Jdt
T
dt u
T0
T0
对于平面简谐波:
1
I 2 A2u
2
单位:Wm2
球面简谐波的波表达式:
r2 r1 O
I1
1 2
A12 2u
I2
1 2
A22 2u
在无吸收时,通过两球面的能流相等
I14pr12 I2 4pr22
A1 r2 A2 r1
解: kr r
1
2
1
2
1 2 2k 1π
r r 2n
1
2
2
2k 1π 2π n 2k 1 2nπ
干涉相消
[例题5-8]两相干波源P、Q,初相位相同,振幅相等,P、 Q间距为1.5个波长, R为PQ连线上任一点,求R点振动的 振幅
t 时刻波阵面
子波源
子波 t+t 时刻波阵面
子波源 子波
用惠更斯原理解释波的衍射 波传播过程中当遇到障碍物时,能绕过障碍物的边 缘而传播的现象——衍射。
阴影区
a
(1)a <<
阴影区
(2)a ~
用惠更斯原理解释波的折射
用作图法求出折射波的传播方向
BC=u1(t2-t1) AD=u2(t2-t1)
y A0r0 cos(t kr)
r
5.3.3 声波 声强级
· I (W / m2) I上=1
1. 正常人听声范围
频率范围:20 20000Hz
·
I0=10-12W/m2
2. 声强级
o 20 1000 20000 (Hz)
大学物理课件——第五章 静电场
作业: 5.2
3.电场强度
3.1 电场的概念 电场间相互作用的场的观点:
电荷
电场
电荷
电场:电荷周围空间存在的一种场,叫电场。静 止电荷产生的电场,叫静电场。
电场的基本性质:对电荷产生作用力
3.2.电场强度
Q
E F q0
q0
F
E
为矢量:
大 方
小 向
: :
E F / q0 沿F 方向
德国数学家和物理学家。1777年4月30日生于德国布伦瑞克,幼时家境贫困, 聪敏异常,受一贵族资助才进学校受教育。1795~1789年在哥廷根大学学习, 1799年获博士学位。1870年任哥廷根大学数学教授和哥廷根天文台台长,一直 到逝世。1833年和物理学家W.E.韦伯共同建立地磁观测台,组织磁学学会以联 系全世界的地磁台站网。1855年2月23日在哥廷根逝世。
谢水奋 副教授 厦门大学物理系 sfxie@
1-16周 星期一 第3-4节 1号楼(学武楼)C206 1-16周 星期四 第5-6节 1号楼(学武楼)A206
教学内容:
电磁学篇(课本上册第5-8章) 振动与波动(课本上册第4章) 波动光学篇(课本下册第12章)
考核方式:
玻璃棒与丝绸摩擦后所带 的电荷为正电荷。
摩擦起电
物体所带电荷量,符号Q (q),单位库伦 C。
1.2 电荷的基本性质 a. 电荷间有力的相互作用,同性相斥,异性相吸。
b.电的中和;
1.3 物质的电结构 物体因得失电子而带电荷。得到电子带负电;
失去电子带正电。电荷是物质的一种基本属性, 就象质量是物质一种基本属性一样。
32
4
E
P
E- r
大学物理课件5动力学

边界层概念及应用
边界层概念
在黏性流体流过固体壁面时,由于黏性作用,在壁面附近形成一 层流速梯度很大的薄层,称为边界层。
边界层的特点
厚度很小,但流速梯度很大,黏性力起主导作用。
应用
解释流体在管道中的流动阻力、分析飞行器的空气动力学性能等。
05
相对论力学简介
狭义相对论基本原理
相对性原理
物理定律在所有惯性参照系中形式不 变,即无法通过实验区分一个相对于 地球静止的实验室和一个相对于太空 匀速直线运动的实验室。
控制原理
采用陀螺仪、加速度计等传感器感知航空航 天器的姿态变化,通过控制算法驱动执行机 构(如舵机、喷气嘴等)进行姿态调整。
ห้องสมุดไป่ตู้
机器人运动规划与控制
运动规划
根据机器人任务需求,规划出机器人的运动 轨迹和动作序列,确保机器人能够高效、准 确地完成任务。
控制策略
采用PID控制、模糊控制、神经网络控制等 方法,对机器人的运动进行精确控制,实现
06
动力学在生活和工程中的 应用
运动生物力学与人体运动分析
运动生物力学
研究生物体运动规律的科学,通过分析肌肉力量、关节角度和运动速度等因素,揭示人 体运动的本质。
人体运动分析
应用运动生物力学原理,对人体在各种运动状态下的表现进行分析,为运动员训练、康 复治疗等提供科学依据。
工程结构动力学与抗震设计
波动
振动在介质中的传播称为波动。波动可分为机械波和电磁波 两大类。机械波需要介质传播,而电磁波可以在真空中传播 。
04
流体动力学初步
理想流体模型及伯努利方程
理想流体模型
无黏性、不可压缩的流体模型,忽略流体的黏性 和可压缩性,简化流体运动的分析。
大学物理精第五章真空中的静电场ppt课件

三、高斯定理
1.表述:在真空中的任何静电场中,通过任一闭 合曲面的电场强度通量等于该闭合曲面内所包 围电荷的代数和除以ε0。
ppt精选版
39
S
• Q
2.数学表达式:
Φ e E d S E c o sd S
n Q i
i 1 0
其中:E为高斯面内、外场源电荷的电场矢量和。
*高斯面为封闭曲面;
q1
Fi
1
4π 0
qiq0 ri3
ri
q2
q3
由力的叠加原理得 q 所0 受合力
F Fi
i
故 q 处0 E总F电 场强Fi度
q0
q i 0
i
Ei
ppt精选版
r1 r2
r3
q0
F3 F2 F1
17
1.电场强度的叠加原理:
点电荷系在某点产生的场强,等于各点电荷单 独存在时在该点分别产生的场强的矢量和。
过球面的电通量
Φe
Q 0
• Q
由图可知从曲面一侧穿入的
电场线必定从另一侧穿出,所
以通过曲面的电通量为0
ppt精选版
38
*如点电荷为负,则通过闭合曲面的电通量为负。
*点电荷发出的通过闭合球面的电通量与球面半径 无关,任意形状的闭合曲面也如此。
*如果闭合曲面没有包含点电荷则进入曲面和穿 出曲面的电场线相同,总电通量为零。
解:选择如图所示的高斯面(电场球对称)
E Φe E cosdS
r
EdSE4r2
R
由高斯定理
Φe
Q 0
E 4 r2 Q 0
1Q
pEpt精选版40 r2
43
例题10 两同心均匀带电球壳,内球球壳半径R1 、 带电量+Q,外球球壳半径R2 、带电量-Q ,不计 球壳厚度,试求电场强度的空间分布。
大学物理教程第五章刚体的转动
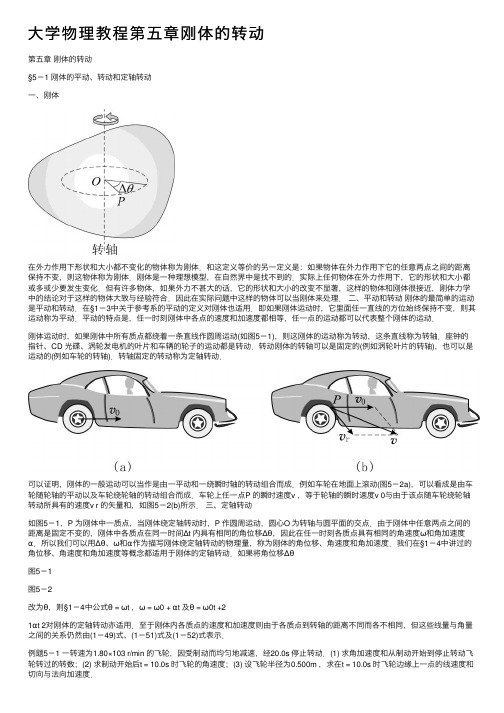
⼤学物理教程第五章刚体的转动第五章刚体的转动§5-1 刚体的平动、转动和定轴转动⼀、刚体在外⼒作⽤下形状和⼤⼩都不变化的物体称为刚体.和这定义等价的另⼀定义是:如果物体在外⼒作⽤下它的任意两点之间的距离保持不变,则这物体称为刚体.刚体是⼀种理想模型,在⾃然界中是找不到的.实际上任何物体在外⼒作⽤下,它的形状和⼤⼩都或多或少要发⽣变化.但有许多物体,如果外⼒不甚⼤的话,它的形状和⼤⼩的改变不显著,这样的物体和刚体很接近,刚体⼒学中的结论对于这样的物体⼤致与经验符合.因此在实际问题中这样的物体可以当刚体来处理.⼆、平动和转动刚体的最简单的运动是平动和转动.在§1-3中关于参考系的平动的定义对刚体也适⽤.即如果刚体运动时,它⾥⾯任⼀直线的⽅位始终保持不变,则其运动称为平动.平动的特点是,任⼀时刻刚体中各点的速度和加速度都相等,任⼀点的运动都可以代表整个刚体的运动.刚体运动时,如果刚体中所有质点都绕着⼀条直线作圆周运动(如图5-1),则这刚体的运动称为转动,这条直线称为转轴.座钟的指针、CD 光碟、涡轮发电机的叶⽚和车辆的轮⼦的运动都是转动.转动刚体的转轴可以是固定的(例如涡轮叶⽚的转轴),也可以是运动的(例如车轮的转轴).转轴固定的转动称为定轴转动.可以证明,刚体的⼀般运动可以当作是由⼀平动和⼀绕瞬时轴的转动组合⽽成.例如车轮在地⾯上滚动(图5-2a),可以看成是由车轮随轮轴的平动以及车轮绕轮轴的转动组合⽽成.车轮上任⼀点P 的瞬时速度v ,等于轮轴的瞬时速度v 0与由于该点随车轮绕轮轴转动所具有的速度v r 的⽮量和,如图5-2(b)所⽰.三、定轴转动如图5-1,P 为刚体中⼀质点,当刚体绕定轴转动时,P 作圆周运动,圆⼼O 为转轴与圆平⾯的交点.由于刚体中任意两点之间的距离是固定不变的,刚体中各质点在同⼀时间Δt 内具有相同的⾓位移Δθ,因此在任⼀时刻各质点具有相同的⾓速度ω和⾓加速度α.所以我们可以⽤Δθ、ω和α作为描写刚体绕定轴转动的物理量,称为刚体的⾓位移、⾓速度和⾓加速度.我们在§1-4中讲过的⾓位移、⾓速度和⾓加速度等概念都适⽤于刚体的定轴转动.如果将⾓位移Δθ图5-1图5-2改为θ,则§1-4中公式θ = ωt ,ω = ω0 + αt 及θ = ω0t +21αt 2对刚体的定轴转动亦适⽤.⾄于刚体内各质点的速度和加速度则由于各质点到转轴的距离不同⽽各不相同,但这些线量与⾓量之间的关系仍然由(1-49)式、(1-51)式及(1-52)式表⽰.例题5-1 ⼀转速为1.80×103 r/min 的飞轮,因受制动⽽均匀地减速,经20.0s 停⽌转动.(1) 求⾓加速度和从制动开始到停⽌转动飞轮转过的转数;(2) 求制动开始后t = 10.0s 时飞轮的⾓速度;(3) 设飞轮半径为0.500m ,求在t = 10.0s 时飞轮边缘上⼀点的线速度和切向与法向加速度.解 (1) 设ω0为初⾓速度,由题意得rad/s π60rad/s 60101.80π2π230=??==n ω s 0.20 ,0==t ω因飞轮均匀减速,其转动为匀变速转动,由§1-4公式,⾓加速度为220rad/s π3rad/s 20.0π60-=-=-=t ωωα从开始制动到停⽌转动飞轮的⾓位移θ及转过的转数N 依次为rad π600rad 20.03π2120.0π6021220=??-=+=t t αωθ 300 2ππ600π2===θN (2) t = 10.0s 时飞轮的⾓速度为()rad/s π30rad/s 10.03ππ600=?-=+=t αωω(3) t = 10.0s 时,飞轮边缘上⼀点的线速度为m/s 1.47m/s 30π.5000=?==ωr v相应的切向加速度及法向加速度为22t m/s 71.4m/s 3π.5000-=?-==αr a()23222n m/s 1044.4m/s 30π.5000?=?==ωr a §5-2 ⼒矩转动定律转动惯量⼀、⼒对转轴的⼒矩根据经验,⼒可以使物体转动.但使物体转动的作⽤,不仅与⼒的⼤⼩有关,⽽且与⼒的⽅向以及⼒的作⽤线和转轴的距离有关.例如当我们⽤⼿关门时,⼒的作⽤线和门的转轴的距离越⼤,越容易把门关上.如果⼒的作⽤线通过门的转轴,或⼒的⽅向与转轴平⾏,则不论⽤多⼤的⼒也不能把门关上.⾸先讨论⼒在垂直于转轴的平⾯内的情形.图5-3为与转轴垂直的刚体的截⾯图,⼒F 在此平⾯内,⼒的作⽤线与转轴的距离为d ,d 称为⼒臂,⼒的⼤⼩F 与⼒臂d 的乘积称为⼒F 对转轴的⼒矩,⽤M 表⽰,则M = Fd (5-1)设r 为从转轴到⼒的作⽤点P 的径⽮,φ为r 与F 之间的夹⾓,由图5-3看出,d = r sin φ,故(5-1)式可写为r F Fr M ⊥==?sin (5—2)其中⊥F 为⼒F 在垂直于r ⽅向的分量.上式表⽰,只有⼒F 在垂直于r ⽅向的分量才对⼒矩有贡献.当φ = 0或φ =180°时M = 0,此时⼒的作⽤线通过转轴,0=⊥F ,d = 0.如果⼒F 不在垂直于转轴的平⾯内,则将F 分解为⼆分⼒F l 、F 2.F l 在垂直于转轴的平⾯内,F 2与转轴平⾏(图5-4).由于平⾏分⼒F 2对物体转动不起作⽤,可以不考虑,因此在⼒矩定义式(5-1)或式(5-2)中,F 应理解为外⼒在垂直于转轴的平⾯内的分⼒.⼒对定轴的⼒矩不但有⼤⼩,⽽且有转向.⼀般规定,如果⼒矩使刚体沿反时针⽅向转动,⼒矩为正;如果⼒矩使刚体沿顺时针⽅向转动,⼒矩为负.如果同时有⼏个⼒作⽤于刚体,则刚体所受的合⼒矩等于各个⼒对转轴的⼒矩的代数和.⼒对转轴的⼒矩与⼒对⼀点的⼒矩之间的关系如上所述,如果⼒F 与转轴不垂直,可将它分解为垂直于转轴的分⼒F l 和平⾏于转轴的分⼒F 2.设O 为通过⼒F 的作⽤点P ⽽垂直于转轴的平⾯与转轴的交点.r 为从O 点到P 点的径⽮(图5-4).则由(4-37)式得⼒F 对O 点的⼒矩为M = r × F = r × (F l + F 2) = r × F l + r × F 2将上式两边投影在转轴上.现在来看左右两边投影的意义.左边为⼒F 对O 点的⼒矩在转轴上的投影,右边r × F 2与转轴垂直,它在转轴上的投影为零.r × F l 与转轴平⾏,它在转轴上的投影等于F l r sin φ(图5-4).⽽后者等于⼒F 对转轴的⼒矩.故得结论:⼒F 对转轴的⼒矩等于⼒F 对O 点的⼒矩M 在转轴上的投影,其中O 为通过⼒F 的作⽤点P ⽽垂直于转轴的平⾯与转轴的交点.应当注意,⼒对⼀点的⼒矩是⽮量,⼒对转轴的⼒矩是标量.这是因为后者是前者的投影之故.⼆、转动定律刚体可看成是由⽆数质点组成,当刚体绕定轴转动时,各个质点都绕定轴作圆周运动,取质点P i 来考虑,设其质量为Δm i ,与转轴的距离为r i ,图5-5为经过P i ⽽垂直于转轴的刚体的截⾯图,作⽤于P i 的⼒有外⼒F i 及内⼒F ’i ,令F i t 及F ’i t 分别表⽰F i 及F ’i 沿切线⽅向的分量,则由切向运动⽅程得F i t + F ’i t = Δm i · r i α两边乘以r i :F i t r i + F ’i t r i = (Δm i r i 2)α将此式对刚体中⼀切质点求和得图5-3 图5-4∑∑∑='+ii i i ii i i i r m r F r F α)Δ(2t t (5-3) ∑'i ii r F t 为所有内⼒对转轴的⼒矩的代数和,即合内⼒矩.下⾯证明此合内⼒矩等于零.取刚体中两质点P i 及P j 来考虑.根据⽜顿第三定律,这两质点相互作⽤的⼒⼤⼩相等⽅向相反,且在同⼀直线上(图5-6),此⼆⼒有相同的⼒臂d ,但因⼆⼒⽅向相反,故其对转轴的合⼒矩为零.⼜因内⼒总是成对的,每⼀对内⼒的合⼒矩既然等于零,所以所有内⼒的合⼒矩亦必等于零,即0t ='∑iii r F 因此,(5-3)式化为∑∑=ii i i i i r m r F α)Δ(2t (5-4)∑iii r F t 为所有外⼒对转轴的⼒矩的代数和,即合外⼒矩,⽤M 表⽰,则上式化为∑=ii i r m M α)Δ(2 (5-5)对于⼀定刚体及⼀定转轴来说,上式中∑ii i r m 2Δ为⼀恒量,称为刚体对该转轴的转动惯量,⽤J 表⽰,即∑=ii i r m J 2Δ (5-6)这样(5-5)式便化为αJ M = (5-7)此式表⽰,刚体的⾓加速度与它所受的合外⼒矩成正⽐,与刚体的转动惯量成反⽐,这⼀关系称为转动定律.这是刚体绕定轴转动的基本定律.刚体绕定轴转动的其他定律都可以由这条定律导出.值得注意,这条定律是从⽜顿第⼆、第三定律推出的.三、转动惯量把转动定律αJ M =与⽜顿第⼆定律F = ma ⽐较,可以看出,这两个式⼦⼗分相似,M 对应于F ,α对应于a ,J 对应于m .我们知道,物体的质量m 是物体的平动惯性⼤⼩的量度,与此类似,物体的转动惯量J 是物体的转动惯性⼤⼩的量度.这可以从转动定律αJ M =看出.转动惯量不同的两个刚体,在相同的图5-5 图5-6外⼒矩作⽤下,转动惯量⼤的刚体⾓加速度⼩,就是它的⾓速度难于改变,也就是转动惯性⼤;反之,转动惯量⼩的刚体,它的转动惯性⼩.根据转动惯量定义:∑=ii i r m J 2Δ如果刚体是由若⼲个质量为m 1,m 2,m 3,…的质点组成,在(5-6)式中Δm i 应代以m i ,得+++=233222211r m r m r m J (5-8)如果刚体的质量连续分布在⼀体积内,(5-6)式中总和式应代以积分式,Δm 应代以d m (刚体中的质量元),得==VV V r m r J d d 22ρ(5-9)其中d V 为刚体的体积元,ρ为体积元d V 处的质量体密度,此积分遍及于刚体的整个体积V .(5-9)式可推求如下:将刚体划分为许许多多⼩部分,每⼀部分的线度极⼩,使它可以看成⼀质点.设各⼩部分的质量为Δm 1,Δm 2,…,Δm i ,…,与转轴的距离依次为r 1,r 2,…,r i ,…,按照(5-6)式,刚体的转动惯量J 近似地等于∑i i m r Δ2,即∑≈ii i m r J Δ2设λ为各⼩部分的线度的最⼤值,λ越⼩,每⼀⼩部分越接近于⼀质点,因此和数∑i i m r Δ2越接近于J ,所以当0→λ时,和数∑i i m r Δ2的极限值便完全等于J 了,即∑→=ii i m r J Δlim 20λ按照⾼等数学,上式中右式就是定积分?Vm r d 2,于是得 ??==VV V r m r J d d 22ρ这就是(5-9)式如果刚体的质量连续分布在⼀⾯上或⼀细线上,则需引⽤质量⾯密度或线密度概念,计算转动惯量公式与上式相同,只需将体密度换为⾯密度或线密度,将体积元换为⾯积元或线元即可.参看例题5-2及5-3.在国际单位制中转动惯量单位为千克平⽅⽶,符号为kg·m 2,转动惯量的量纲为ML 2.⼏何形状简单的刚体,其转动惯量可⽤积分法算出,见表5-1.表5-1 质量分布均匀的⼏种刚体的转动惯量a) 细棒(转轴通过中⼼与棒垂直) b) 细棒(转轴过棒的⼀端与棒垂直) 2121ml J = 231ml J =c) 圆柱体(转轴沿⼏何轴) d) 球体(转轴沿球的任⼀直径)221mR J = 252mR J =e) 薄圆筒(转轴沿⼏何轴) f ) 圆筒(转轴沿⼏何轴)2mR J = )(212221R R m J +=例题5-2 求质量为m 、板长为l 的均匀细棒对于通过棒的中点⽽与棒垂直的轴的转动惯量.解在棒上取与轴OO ’距离为x 、长为d x 的⼀⼩段来考虑(图5-7),这⼀⼩段的质量为d m = λd x .其中λ为棒的质量线密度.根据转动惯量定义,棒对轴OO ’的转动惯量为32222121d d l x x m x J l l -λλ===?? 棒的质量线密度lm =λ,代⼊上式得 2121ml J = 例题5-3 求质量为m 、半径为r 的匀质圆盘对于通过圆⼼⽽垂直于圆平⾯的轴的转动惯量.解在圆盘上取⼀半径为x ,宽为d x 的圆环来考虑(图5-8),这圆环的⾯积为2πx d x ,质量为d m = 2πσx d x ,其中σ为圆盘的质量⾯密度.根据转动惯量定义,圆盘对通过圆⼼O ⽽垂直圆平⾯的轴的转动惯量为4032π21d π2d r x x m x J r σσ===?? 圆盘的质量⾯密度2πrm =σ,代⼊上式得 221mr J = 上式对匀质圆柱体对于它的⼏何轴的转动惯量亦适⽤.决定刚体的转动惯量J 的⼤⼩因素有三:①刚体的质量;②刚体质量分布情况;③刚体的转轴的位置.例如质量均匀、⼤⼩相同的铅球和铜球,由于铅球质量较⼤,所以对于位置相同的轴来说,铅球的J 较⼤.⼜如有两个圆柱体,外径相等,质量也相等,但其中⼀个为实⼼,另⼀个为空⼼(质量分布不同),则对于它们的⼏何轴来说空⼼的圆柱体的J 较⼤.⼜如同⼀根棒对于通过棒的中⼼与棒垂直的轴与对于通过棒的⼀端与棒垂直的轴的J 不相同.例题 5-4 在半径分别为R 1、R 2的阶梯形滑轮上反向绕有两根轻绳,各悬挂质量为m 1、m 2的物体,如图5-9所⽰.若滑轮与轴间的摩擦忽略不计,滑轮的转动惯量为J ,求滑轮的⾓加速度α及各绳中张⼒F T1、F T2.解分析各物体的受⼒情况,如图5-9右图,对于滑轮,重⼒和轴的⽀承⼒通过轴⼼,其⼒矩为零.由于是轻绳,应有F T1 = F’T1,F T2 = F ’T2.先假设物体运动⽅向为:m 1的加速度a 1向下,m 2的加速度a 2向上,滑轮沿顺时针⽅向转动.选取物体运动⽅向为坐标轴正向,根据⽜顿第⼆定律和转动定律可得111T 1a m F g m =- 2222T a m g m F =- αJ R F R F =-22T 11T 滑轮边缘的切向加速度等于物体的加速度:αα2211 ,R a R a == 解以上各式得 g R m R m J R m R m 2222112211++-=α g m R m R m J R R m R m J R g m F 1222211212222111T )(???? ?++++=-=α图5-7 图5-8图5-9gm R m R m J R R m R m J R g m F 2222211211211222T )(???? ?++++=+=α讨论:1) 当m 1gR 1 > m 2gR 2 时,物体运动⽅向与原假定⽅向相同.2) 当m 1gR 1 = m 2gR 2 时,α = 0,滑轮作匀速转动或静⽌,运动状态或⽅向由初时刻条件决定.3) 当m 1gR 1 < m 2gR 2时,物体运动⽅向与原假定⽅向相反,即m 1向上,m 2向下,滑轮沿反时针⽅向转动.§5-3 转动动能⼒矩的功⼀、转动动能如图5-10,设刚体绕通过O 点⽽垂直于图平⾯的定轴转动,⾓速度为ω.当刚体转动时,刚体中各质点都绕定轴作圆周运动,因⽽都有动能.刚体的转动动能等于刚体中所有质点的动能之和.设各质点的质量为Δm 1,Δm 2,Δm 3,…,与转轴的距离为r 1,r 2,r 3,…,线速度为v 1 = r 1ω,v 2 = r 2ω,v 3 = r 3ω,…,则刚体的转动动能为22223322222211k Δ21 Δ21Δ21Δ21ωωωω??=+++=∑i i i r m r m r m r m E 但J r m ii i =∑2Δ为刚体的转动惯量,故E k ⼜可写为2k 21ωJ E =(5-10)即刚体的转动动能等于刚体的转动惯量与⾓速度的平⽅的乘积的⼀半,(5-10)式与平动动能公式2k 21v m E =形式相似,⽽且量纲也相同.⼆、⼒矩的功如图5-11,设绕定轴转动的刚体在外⼒F 作⽤下有⼀⾓位移d θ,⼒F 在垂直于转轴的平⾯上,从转轴到⼒的作⽤点的径⽮为r ,则⼒的作⽤点的位移d r 的⼤⼩为d s = r d θ.根据定义,⼒F 在位移d r 中的功为d W = F · d r = F cos α d s因α与φ互为余⾓,cos α = sin φ,故上式可写为d W = Fr sin φd θ⼜由(5-2)式Fr sin φ = M 为⼒F 对转轴的⼒矩,故⼜可写为图5-10 图5-11d W = M d θ(5-11)这就是⼒矩M 在微⼩⾓位移d θ中的功的公式.当刚体在⼒矩M 作⽤下产⽣⼀有限⾓位移θ时,⼒矩的功等于(5-11)式的积分:=θθ0d M W (5-12)如果⼒矩M 为常量,则θθθθθM M M W ===??00d d (5-13)如果刚体同时受到⼏个⼒作⽤,则(5-11)及(5-12)式中M 应理解为这⼏个⼒的合⼒矩.当外⼒矩对刚体作功时,刚体的转动动能就要变化,下⾯我们来求⼒矩的功与刚体转动动能的变化之间的关系.由转动定律tJ J M d d ωα== 其中M 为作⽤于刚体的合外⼒矩,在d t 时间内刚体的⾓位移为d θ = ωd t ,合外⼒矩的功为ωωωωθd d d d d d J t t J M W =??== 当刚体的⾓速度由ω1变为ω2时,合外⼒矩对刚体所作的功等于上式的积分,即21222121d 21ωωωωωωJ J J W -==? (5-14)上式指出,合外⼒矩对刚体所作的功等于刚体的转动动能的增量.例题5-5 ⼀长为l 质量为m 的均匀细长杆OA ,绕通过其⼀端点O 的⽔平轴在铅垂⾯内⾃由摆动.已知另⼀端点A 过最低点时的速率为v 0,杆对通过端点O ⽽垂直于杆长的轴的转动惯量231ml J =,若空⽓阻⼒及轴上的摩擦⼒都可以忽略不计,求杆摆动时A 点升⾼的最⼤⾼度h .解作⽤于杆的⼒有重⼒m g 及轴对杆的⽀承⼒F N ,⽀承⼒F N 通过O 点,其⼒矩为零.重⼒m g 作⽤于杆的质⼼C ,⼒矩为θsin 2l mg ,当杆沿升⾼⽅向有⾓位移d θ时,由于重⼒矩与⾓位移转向相反.其元功为θθd sin 2d l mg W -= 设θm 为杆的最⼤⾓位移,当杆从平衡位置转到最⼤⾓位移θm 位置时,重⼒矩所作的总功为)cos 1(2d sin 2d m 0m θθθθ--=-==??l mg l mg W W 由图5-12看出,h = l (1-cos θm ),代⼊上式得图5-12mgh W 21-= 杆在平衡位置时的⾓速度l00v =ω,在⾓位移最⼤时的⾓速度0m =ω.由于合外⼒矩的功等于转动动能的增量,故得 20220220613121 21021v v m l m l J m gh W -=??-=-=-=ω由此得 gh 320v = §5-4 绕定轴转动的刚体的⾓动量和⾓动量守恒定律当刚体以⾓速度ω绕定轴转动时,刚体中各质点都绕定轴作圆周运动.设质点P i 的质量为Δm i ,与轴的距离为r i ,线速度的⼤⼩为v i ,则质点P i 的动量的⼤⼩为Δm i v i (图5-13),P i 对转轴的⾓动量为Δm i v i r i .刚体中所有质点的⾓动量之和称为刚体对转轴的⾓动量,⽤L 表⽰,则ωωωJ r m r m r m L i i i i i i i i i i =??===∑∑∑22ΔΔΔv这样,刚体的转动定律可写为tL t J t JM d d d )d(d d ===ωω即 tJ t L M d )d(d d ω== (5-15)可以证明:(5-15)式不但适⽤于绕定轴转动的刚体,⽽且适⽤于绕定轴转动的任意物体或物体系.所不同的是,对于绕定轴转动的刚体来说,转动惯量J 是不变的,但对于绕定轴转动的任意物体或物体系来说,J 是可以变化的.在特殊情形下,如果作⽤于转动物体的合外⼒矩M = 0,则由(5-15)式,我们有L = J ω = 常量(5-16)即当物体所受的合外⼒矩等于零时,物体的⾓动量J ω保持不变,这⼀结论称为⾓动量守恒定律.⾓动量守恒有两种情形:① J 不变的情形,由(5-16)式得知ω亦不变,地球的⾃转差不多是这种情形;② J 是变化的情形,由(5-16)式得知,当J 减⼩时,ω增⼤;当J 增⼤时,ω减⼩.例如⼀⼈坐在可以绕铅直轴⾃由转动的凳⼦上,⼿中握着两个很重的哑铃.当他两臂伸开时,使凳⼦和⼈⼀起转动起来,假设轴承处的摩擦很⼩可以忽略不计,则凳⼦和⼈没有受到外⼒矩作⽤,其⾓动量J ω保持不变(图5-14a).当⼈把两臂收缩时,转动惯量J 减⼩,⾓速度ω就增⼤,即是说⽐两臂伸开时要转得快些(图5-14b).⼜如跳⽔运动员在空中翻筋⽃图5-13时,先把两臂伸直,当他从跳板跳起时使他⾃⼰以某⼀⾓速度绕通过腰部的⼀⽔平轴线转动,在空中时使臂和腿尽量蜷缩起来,以减⼩转动惯量,因⽽⾓速度增⼤,在空中迅速翻转,当他快要接近⽔⾯时,再伸直两臂和腿以增⼤转动惯量,减⼩⾓速度,以便竖直地进⼊⽔中.⾓动量守恒定律,与前⾯介绍过的动量守恒定律和能量守恒定律⼀样,是⾃然界中的普遍规律之⼀,不但适⽤于宏观物体的机械运动,也适⽤于原⼦、原⼦核和基本粒⼦等微观粒⼦的运动.例题5-6 ⼀⽔平放置的圆盘形转台.质量为m ’,半径为R ,可绕通过中⼼的竖直轴转动,摩擦阻⼒可以忽略不计.有⼀质量为m 的⼈站在台上距转轴为2R 处.起初⼈和转台⼀起以⾓速度ω1转动,当这⼈⾛到台边后,求⼈和转台⼀起转动的⾓速度ω2.解以⼈和转台为⼀系统,该系统没有受到外⼒矩作⽤,因此⾓动量守恒:J 1ω1 = J 2ω2 =常量即 22212221421ωω??? ??+'=???? ?+'mR R m R m R m 由此得 12422ωωmm m m +'+'= 思考题5-1 对于定轴转动刚体上的不同点来说,下⾯的物理量中哪些具有相同的值,哪些具有不同的值?线速度、法向加速度、切向加速度、⾓位移、⾓速度、⾓加速度.5-2 飞轮转动时,在任意选取的⾓位移间隔Δθ内,⾓速度的增量Δω相等,此飞轮是在作匀加速转动吗?5-3 作⽤在刚体上的合外⼒为F ,合外⼒矩为M ,举例说明在什么情况下(1) F ≠ 0⽽M = 0;(2) F = 0⽽M ≠ 0;(3) F = 0且M = 0.5-4 当刚体受到若⼲外⼒作⽤时,能否⽤平⾏四边形法先求它们的合⼒,再求合⼒的⼒矩?其结果是否等于各外⼒的⼒矩之和?5-5 在磁带录⾳机中,驱动装置将磁带匀速拉过读写磁头,于是磁带被拉出的⼀端卷带轴上剩余的磁带半径逐渐减⼩,作⽤在该卷带轴上的⼒矩随时间如何变化?该卷带轴的⾓速度随时间如何变化?5-6 如果要设计⼀个存储能量的飞盘,在质量和半径相同的情况下,应该选取质量均匀分布的圆盘形的还是质量集中在边缘的圆环形的呢?当⾓速度相同时,⼆者的转动动能之⽐为多少?图5-145-7 ⼏何形状完全相同的铁圆盘与铝圆盘,哪⼀个绕中⼼对称轴的转动惯量⼤?要使它们由静⽌开始绕轴转动并获得相同的⾓速度,对哪⼀个圆盘外⼒矩要作更多的功?5-8 恒星起源于缓慢旋转的⽓团,在重⼒作⽤下,这些⽓团的体积逐渐减⼩,在恒星尺度收缩的过程中,它的⾓速度如何变化?习题5-1 ⼀个螺丝每厘⽶长度上有20条螺纹,⽤电动螺丝起⼦驱动,在12.8s 内推进了1.37cm ,求螺丝的平均⾓速度.5-2 转盘半径为10.0cm ,以⾓加速度10.0 rad/s 2由静⽌开始转动,当t = 5.00s 时,求(1) 转盘的⾓速度;(2) 转盘边缘的切向加速度和法向加速度.5-3 ⼀个匀质圆盘由静⽌开始以恒定⾓加速度绕过中⼼⽽垂直于盘⾯的定轴转动.在某⼀时刻,转速为10.0 r/s ,再转60转后,转速变为15.0 r/s ,试计算:(1)⾓加速度;(2)由静⽌达到10.0 r/s 所需时间;(3)由静⽌到10.0 r/s 时圆盘所转的圈数.5-4 如图所⽰,半径r 1 = 30.0 cm 的A 轮通过⽪带被半径为r 2 = 75.0 cm 的B 轮带动,B 轮以π rad/s 的匀⾓加速度由静⽌起动,轮与⽪带间⽆滑动发⽣,试求A 轮⾓速度达到3.00×103 r/min 所需要的时间.5-5 在边长为b 的正⽅形的顶点上,分别有质量为m 的四个质点,求此系统绕下列转轴的转动惯量:(1)通过其中⼀质点A ,平⾏于对⾓线BD 的转轴,如图所⽰.(2)通过A 垂直于质点所在平⾯的转轴.5-6 求半径为R ,质量为m 的均匀半圆环相对于图中所⽰轴线的转动惯量.5-7 代换汽车引擎盖密封垫时要求对螺栓的扭矩达到90.0N·m(扭矩过⼤会使密封垫失效),如果使⽤长度为45.0 cm 的扳⼿,如图所⽰,在垂直于扳⼿⼿柄⽅向⽤多⼤的作⽤⼒可以完成这⼀⼯作?5-8 ⽔井上提⽔的辘轳为圆柱形,半径为0.200m ,质量为5.00kg ,辘轳缠绕的轻绳上悬挂的⽔桶质量为3.00kg ,如图所⽰.辘轳失去控制使⽔桶⽆初速地下落,在2.00s 后达到井下⽔⾯,忽略辘轳轴上的摩擦阻⼒,求(1) ⽔桶下落的加速度;(2) 井⼝到⽔⾯的深度;(3) 辘轳的⾓加速度.题5-4图题5-5图题5-6图题5-7图5-9 圆盘形飞轮直径为1.25m ,质量为80.0kg ,飞轮上附着的滑轮半径为0.230m ,质量可以忽略,电动机通过环绕滑轮的⽪带驱动飞轮顺时针旋转,如图所⽰.当飞轮的⾓加速度为1.67rad/s 2时,上段⽪带中的张⼒为135N ,忽略轴上的摩擦阻⼒,求下段⽪带中的张⼒.5-10 制陶旋盘半径为0.500m ,转动惯量为12.0kg·m 2,以转速50.0r/min 旋转.陶⼯⽤湿抹布沿径向施加70.0N 的⼒按住旋盘的边缘,使之在6.00s 内制动,求旋盘的边缘和湿抹布之间的有效滑动摩擦系数.5-11 ⼀轻绳跨过滑轮悬有质量不等的⼆物体A 、B ,如图所⽰,滑轮半径为20.0 cm ,转动惯量等于50.0 kg·m 2,滑轮与轴间的摩擦⼒矩为98.1N·m ,绳与滑轮间⽆相对滑动,若滑轮的⾓加速度为2.36 rad/s 2,求滑轮两边绳中张⼒之差.5-12 如图所⽰的系统中,m 1 = 50.0 kg ,m 2 = 40.0 kg ,圆盘形滑轮质量m = 16.0 kg ,半径R = 0.100 m ,若斜⾯是光滑的,倾⾓为30°,绳与滑轮间⽆相对滑动,不计滑轮轴上的摩擦,(1)求绳中张⼒;(2)运动开始时,m 1距地⾯⾼度为1.00 m ,需多少时间m 1到达地⾯?5-13 飞轮质量为60.0 kg ,半径为0.250 m ,当转速为1.00×103 r/min 时,要在5.00 s 内令其制动,求制动⼒F ,设闸⽡与飞轮间摩擦系数µ = 0.400,飞轮的转动惯量可按匀质圆题5-8图题5-9图题5-11图题5-12图题5-13图题5-15图盘计算,闸杆尺⼨如图所⽰.5-14 ⼀个风扇转速为900 r/min ,当马达关闭后,风扇均匀减速,⽌动前它转过了75转,在此过程中制动⼒作的功为44.4 J ,求风扇的转动惯量和摩擦⼒矩.5-15 如图所⽰,质量为24.0 kg 的⿎形轮,可绕⽔平轴转动,⼀绳缠绕于轮上,另⼀端通过质量为5.00 kg 的圆盘形滑轮悬有10.0 kg 的物体,当重物由静⽌开始下降了0.500 m 时,求:(1)物体的速度;(2)绳中张⼒.设绳与滑轮间⽆相对滑动.5-16 蒸汽机的圆盘形飞轮质量为200 kg ,半径为1.00 m ,当飞轮转速为120 r/min 时关闭蒸汽阀门,若飞轮在5.00 min 内停下来,求在此期间飞轮轴上的平均摩擦⼒矩及此⼒矩所作的功.5-17 长为85.0 cm 的均匀细杆,放在倾⾓为45°的光滑斜⾯上,可以绕过上端点的轴在斜⾯上转动,如图所⽰,要使此杆实现绕轴转动⼀周,⾄少应给予它的下端多⼤的初速度? 5-18 如图所⽰,滑轮转动惯量为0.0100 kg·m 2,半径为7.00 cm ,物体质量为5.00 kg ,由⼀绳与劲度系数k = 200 N/m 的弹簧相连,若绳与滑轮间⽆相对滑动,滑轮轴上的摩擦忽略不计,求:(1)当绳拉直弹簧⽆伸长时,使物体由静⽌⽽下落的最⼤距离;(2)物体速度达最⼤值的位置及最⼤速率. 5-19 圆盘形飞轮A 质量为m ,半径为r ,最初以⾓速度ω0转动,与A 共轴的圆盘形飞轮B 质量为4m ,半径为2r ,最初静⽌,如图所⽰,两飞轮啮合后,以同⼀⾓速度ω转动,求ω及啮合过程中机械能的损失. 5-20 ⼀⼈站在⼀匀质圆板状⽔平转台的边缘,转台的轴承处的摩擦可忽略不计,⼈的质量为m ’,转台的质量为10 m ’,半径为R .最初整个系统是静⽌的,这⼈把⼀质量为m 的⽯⼦⽔平地沿转台的边缘的切线⽅向投出,⽯⼦的速率为v (相对于地⾯).求⽯⼦投出后转台的⾓速度与⼈的线速度.5-21 ⼀⼈站⽴在转台上,两臂平举,两⼿各握⼀个m = 4.00 kg 的哑铃,哑铃距转台轴r 0 = 0.800 m ,起初,转台以ω0 = 2π rad/s 的⾓速度转动,然后此⼈放下两臂,使哑铃与轴相距r = 0.200 m ,设⼈与转台的转动惯量不变,且J = 5.00 kg·m 2,转台与轴间摩擦忽略不计,求转台⾓速度变为多⼤?整个系统的动能改变了多少?5-22 证明刚体中任意两质点相互作⽤⼒所作之功的和为零.如果绕定轴转动的刚体除受到轴的⽀承⼒外仅受重⼒作⽤,试证明它的机械能守恒.5-23 ⼀块长L = 0.500 m ,质量为m =3.00 kg 的均匀薄⽊板竖直悬挂,可绕通过其上端的⽔平轴⽆摩擦地⾃由转动,质量m = 0.100 kg 的球以⽔平速度v 0 = 50.0 m/s 击中⽊板中题5-17图题5-18图题5-19图⼼后⼜以速度v = 10.0 m/s 反弹回去,求⽊板摆动可达到的最⼤⾓度.⽊板对于通过其上端轴的转动惯量为231L m J '= . 5-24 半径为R 质量为m '的匀质圆盘⽔平放置,可绕通过圆盘中⼼的竖直轴转动.圆盘边缘及R /2处设置了两条圆形轨道,质量都为m 的两个玩具⼩车分别沿⼆轨道反向运⾏,相对于圆盘的线速度值同为v .若圆盘最初静⽌,求⼆⼩车开始转动后圆盘的⾓速度.5-25 花样滑冰运动员起初伸展⼿臂以转速1.50r/s 旋转,然后他收拢⼿臂紧靠⾝体,使他的转动惯量减少到原来的3/4,求该运动员此时的转速.5-26 旋转⽊马转盘半径为2.00m ,质量为25.0kg ,假设可视为圆盘形刚体,转速为0.200r/ s ,⼀个质量为80.0kg 的⼈站在转盘边缘.当此⼈⾛到距转轴1.00m 处时,求转盘的⾓速度和⼈和转盘组成的系统转动动能的改变量.。
大学物理力学第五章1刚体、转动定律

(12)
例1、如图所示,A、B为两个相同的绕着轻绳的定滑
轮.A滑轮挂一质量为M的物体,B滑轮受拉力F,而且
F=Mg.设A、B两滑轮的角加速度分别为βA和β B,
不计滑轮轴的摩擦,则有
(A) β A= β B. (B) β A> β B. (C) β A< β B. (D) 开始时β A= β B,以后β A< β B.
转动惯量的计算
1)定义 J miri2
J r 2dm
i
m
2) 对称的 简单的 查表
3) 平行轴定理
典型的几种刚体的转动惯量
m
m
l
细棒转轴通过中 心与棒垂直
J ml 2 12
l
细棒转轴通过端 点与棒垂直
J ml 2 3
M,R
M,R
o
圆环转轴通过环心与环面垂直
J MR2
薄圆盘转轴通过 中心与盘面垂直
以 m1 为研究对象 m1g T1 m1a 以 m 2 为研究对象 T2 m2a 以 M 为研究对象
(T1 T2 )R J J 1 MR 2 2
m 2 T2 M , R
(1) T1
T1
(2)
m1
m1
M ,R
m1g (3)
T2
m2
T2
T1
补充方程:
a R
(4)
联立方程(1)---(4)求解得
J 1 MR 2 2
m 2r
r l
球体转轴沿直径
J 2mr 2 5
圆柱体转轴沿几何轴
J 1 mr 2 2
转动定律应用举例 解题步骤: 1. 认刚体;
3. 分析力和力矩;
大学物理第5章刚体
B C
分析受力和力矩情况
第一篇 力 学
解:由ABC和绳子组成系统为研究对象,分析受力和力矩情况。
系统受到的合力矩: M m2 gr m3gr
对整个系统列出角动量定理积分形式
t
Mdt Lt L0
t0
分别计算,有 Mdt (m2gr m1gr)t
L0 0
0
L
LA
若质量连续分布 J r2dm
一维
二维
三维
dm
dl
线密度 dm dl
J r2dl
面密度 dm dS
J r2dS
体密度 dm dV
J r2dV
第一篇 力 学
例1.求长为L、质量为m的均匀细棒对图中不同轴的转动惯量。
解:取如图坐标,dm=dx
J A
L x2dx mL2 / 3
0
L
JC
2 L
x2dx
mL2
/12
2
A L
A
C
L/2
B X
B L/2 X
例2.求质量为m、半径为R的均匀圆环的转动惯量。轴与圆环平面垂
直并通过圆心。
解:
J R2dm R2 dm mR2
O
R
dm
第一篇 力 学
例3.求长求质量为m、半径为R均匀圆盘的转动惯量。轴与盘平面垂 直并通过盘心。
解:取半径为r宽为dr 的薄圆环
dm 2rdr
dJ r2dm 2r3dr
dr rR
J dJ R 2r3dr 1 R4
0
2
m
R 2
《大学物理》第五章刚体的定轴转动
偏转角为30°。问子弹的初速度为多少。
o
解: 角动量守恒:
30°
mva 1 Ml 2 ma 2
la
3
v
机械能守恒:
1 1 Ml 2 ma 2 2 mga1 cos 30 Mg l 1 cos 30
23
2
v 1 g 2 3 Ml 2ma Ml 2 3ma 2 ma 6
刚体可以看成是很多质元组成的质点系,且在外力 作用下,各个质元的相对位置保持不变。 因此,刚体的运动规律,可通过把牛顿运动定律应 用到这种特殊的质点系上得到。
3
2.刚体的运动
平动:刚体在运动过程中,其上任意两点的连线 始终保持平行。
刚体的平动可看做刚体质心 的运动。
转动:刚体中所有的点都绕同一直线做圆周运动. 转动又分定轴转动和非定轴转动 .
r2dm
L
r2 dl
L
(线质量分布)
12
3 平行轴定理
如果刚体的一个轴与过质 心轴平行并相距d,则质量 为 m 的刚体绕该轴的转动 惯量,等于刚体绕过质心 轴的转动惯量与 md2 之和:
J z Jc md 2
请同学们自己证明平行轴定理的。
提示:利用余弦定理 ri2 ri '2 d 2 2dxi 13
hc hi
若A外+ A内非=0
Ep=0
则Ek +Ep =常量。
例13 一均质细杆可绕一水平轴旋转,开始时处于 水平位置,然后让它自由下落。求: ( )
解 方法一 动能定理
M mg L cos
2
W
Md
mg
L cosd
0
0
2
mg L sin
2
θ
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械波
本课时教学基本要求
1、理解半波损失的产生过程,掌握发生半波损 失的条件及其中的相位关系。 2、理解反射波产生过程中的相位关系,熟练掌 握反射波表达式的确定方法! 3、理解多普勒效应并能计算波源和观察者在同 一直线上运动时的频率变化。
2011-5-5
phypzq@
1
第六章
机械波
对于电磁波
c+u νR = νS c−u
2011-5-5
phypzq@
27
第六章
作业: 6-45 6-52 6-59
机械波
2011-5-5
phypzq@
28
2011-5-5
phypzq@
17
第六章
机械波
1、波源不动,观察者相对介质运动时
νR =
u + vR
λ
u + vR = νS u
2011-5-5
phypzq@
18
第六章
2、观察者不动, 波源相对介质运动 时有
机械波
λ ′ = λ − vSTS
u u νR = = νS λ ′ u − vS
2011-5-5
phypzq@
8
第六章
分析教材上的例题6.5,例题6.6
机械波
2011-5-5
phypzq@
9
第六章
机械波
x ⎞⎤ ⎡ ⎛ 例题:有一平面简谐波 y = 10 − 3 cos ⎢ 200π ⎜ t − ⎟ ⎥ (SI), 200 ⎠ ⎦ ⎝ ⎣ 沿如图所示方向传播, 在壁面 A点处发生反射,反射 点为波节,试求反射波 的波动方程。
2011-5-5
phypzq@
4
Each string of a violin naturally oscillates at one or more of its harmonic frequencies, producing sound waves in the air with the same frequencies.
phypzq@
23
第六章
u + vR νR = νS u − vS
机械波
3、当波源与观测者相对介质都有相对运动时
分析书上例题6.8 注意二次多普勒效应现象!
2011-5-5
phypzq@
24
第六章
机械波
【例题】某汽笛静止时发出的声音频率为1500Hz,当该汽笛离 你而去并以速度20m/s奔向悬崖时,你听到的直接来自汽笛的 声音频率为 ,你听到的由悬崖反射回来的声音频率 为 ,拍频为 。(取空气中的声速为330m/s) 解:
λ
A
Time t
λ
B A
Time t+dt
Take the reference frame with wave A, τ is the time between two times of two wave maximum coincide, λ is distance that the wave maximum moves. The speed of the wave maximum respect phypzq@ is λ/τ 。 to wave A 2011-5-5 13
14
第六章
机械波
多普勒效应
当波源与观察者有相对于传播介质有运动时,观察 者接收到的频率与波源发出的频率有差异的现象称为 多普勒效应。
Video—多普勒效应
2011-5-5
phypzq@
15
第六章
机械波
2011-5-5
phypzq@
16
第六章
机械波
为讨论方便,假设波源和观察者均沿它们的连线运 动,设波源相对介质的速度为 VS,观察者相对介质的 速度为 VR,并规定 VS、 VR朝着对方运动取正值,背 离对方运动取负值。 所谓观察者接收到的频率是指单位时间内人耳或仪 器接收到的完整波的数目。
ν′ =
340 + 28 ν 340 − 20
340 340 340 + 28 ⋅ ν ′′ = ν′ = ν 340 − 28 340 − 28 340 − 20
340 = 0.271 (m) λ ′′ = ν ′′
2011-5-5
phypzq@
26
第六章
多普勒效应有许多 应用:如声纳、书上的激波
第六章
机械波
2011-5-5
phypzq@
6
第六章
机械波
Video—MIT乐器的频谱
2011-5-5
phypzq@
7
第六章
机械波
二、反射波表达式的确定:
正确把握入射波在反射时是否有相位 π 的突变是 解反射波的波动方程的关键!解题基本步骤如下: ①、先将反射点的坐标代入入射波方程,得到入射波在 反射点的振动方程; ②、判断入射波在反射过程中有无半波损失,求出反射 波在反射点的振动方程; ③、写出反射波的标准表达式,将反射点的坐标代入, 并与②中的振动方程比较,确定其反射波表达式中的初 相位即可。
2011-5-5
u
x
•
P
A X
2.25m
phypzq@
11
第六章
了解群速与相速
机械波
Demonstration!
dx = fλ v= dt
dω vg = dk
dv vg = v − λ dλ
2011-5-5
phypzq@Βιβλιοθήκη 12第六章dλ B v
机械波
Wave A: v,λ;Wave B:v´=v+dv, λ´= λ+dλ*
第六章
【小结】:
机械波
1、当反射点是自由端时(或当波从波密介质向波疏介 质传播时),反射过程中没有半波损失,在反射点入射 波和反射波引起的振动方程是相同的。 2、当反射点是固定端时(或当波从波疏介质向波密介 质传播时),反射过程中一定伴有半波损失,在反射点 入射波和反射波引起的振动方程的相位是相反的,即入 射波在反射时有相位 π 的突变。
2011-5-5
phypzq@
19
第六章
机械波
Demonstration!
2011-5-5
phypzq@
20
第六章
机械波
2011-5-5
phypzq@
21
第六章
机械波
2011-5-5
phypzq@
22
第六章
机械波
2011-5-5
u ν1 = ν u + 20
ν 1 =1414.3(Hz) ν 2 =1596.8(Hz) ν b =182.5(Hz)
phypzq@
25
u ν2 = ν u − 20
ν b = ν 2 −ν 1
2011-5-5
第六章
机械波
【例题】一声源发出频率为103 Hz的声音,它相对地面以20 m/s的速率向右运动。其右方有一反射面相对地面以28 m/s的速 率向左运动,从该反射面反射回来的声波波长是____________。 (已知空气中声速为340 m/s) 解:
第六章
dλ B v
机械波
λ
A
Time t
λ
B A
Time t+dt
In the ground frame the speed of the wave maximum (group speed) is
λ vg = v − τ
∵τ = dλ dv
dv ∴ vg = v − λ dλ
2011-5-5
phypzq@
设d = OA = 2.25m, 则 2d-x Δt = u O 2d − x ⎞ ⎡ ⎤ ⎛ y反 = 10 − 3 cos ⎢ 200π ⎜ t − ⎟ +π ⎥ 200 ⎠ ⎝ ⎣ ⎦ x ⎞ ⎤ ⎡ ⎛ −3 = 10 cos ⎢ 200π ⎜ t + ⎟ − 3.5π ⎥ ⎝ 200 ⎠ ⎦ ⎣
−3
将x = 2 .25 代入比较,得到 ϕ ′ = − 3 .5π
2011-5-5
phypzq@
10
第六章
机械波
−3
x ⎞⎤ ⎡ ⎛ 例题:有一平面简谐波 y = 10 cos ⎢ 200π ⎜ t − ⎟ ⎥ ( SI), 200 ⎠ ⎦ ⎝ ⎣ 沿如图所示方向传播, 在壁面 A 点处发生反射,反射 点为波节,试求反射波 的波动方程。 解二: yO = 10 − 3 cos 200πt 反射波到 P点相位落后于原点 Y
解一:入射波在 A点振动方程为 Y y A入 = 10 − 3 cos( 200πt − 2.25π ) 由于反射点为波节 y A反 = 10 cos( 200πt − 1.25π )
−3
u
A
O 2.25m
X
x ⎞ ⎡ ⎤ ⎛ ′⎥ y反 = 10 cos ⎢ 200π ⎜ t + ⎟ +ϕ ⎝ 200 ⎠ ⎣ ⎦
机械波
介质传播时
一、波的反射与半波损失
当波从波密介质向波疏 n1 > n 2 这时没有半波损失
2011-5-5
phypzq@
2
第六章
当波从波疏介质向波密 n1 < n 2
机械波
介质传播时
这时有半波损失
Video—波反射时的相位突变
2011-5-5
phypzq@
3