推瓶机 机械原理课程设计
推瓶机 机械原理课程设计

《机械原理课程设计》说明书课程设计题目: 推瓶机设计学院:学号:设计者:指导教师:日期: 2016年1月15日目录1.洗瓶机的工作原理及主要动作1.1.洗瓶机的工作示意图 (1)1.2原始数据 (1)1.3.推瓶机构的设计要求 (1)2.系统功能图 (2)3.推头运动路线的分析 (2)4.方案的设计及分析 (3)4.1方案的设计 (3)4.2方案的分析与决策 (4)5.推瓶机运动简图绘制 (5)6.尺寸综合 (5)6.1机构运动的尺寸分析确定 (5)6.1.1设计推导的公式 (5)6.1.2杆长的确定 (6)6.2分点与推杆的位置与凸轮参数的设计 (7)6.3洗瓶机的运动循环图 (7)7.凸轮的设计和廓线绘制 (8)7.1摆动凸轮的设计 (8)7.2直动凸轮的设计 (9)7.3压力角的检验 (10)7. 4机构尺寸的确定 (10)8.运动参数设计 (10)9.推瓶机动力装置和传动系统的设计. (11)10.心得体会 (12)11.参考文献 (12)1.洗瓶机的工作原理及主要动作洗瓶机如图2.1所示,待洗的瓶子放在两个同向转动的导辊上,导辊带动瓶子旋转。
当推头M把瓶子推向前进时,转动着的刷子就把瓶子外面洗净。
当前一个瓶子将洗刷完毕时,后一个待洗的瓶子已送入导辊待推。
它的主要动作:将到位的瓶子沿着导辊推动,瓶子推动过程中将瓶子旋转以及将刷子转动。
1.1洗瓶机的工作示意图图1.1 洗瓶机工作示意图1.2原始数据①瓶子尺寸:大端直径d=80mm,长200mm。
②推进距离:600mm。
1.3 推瓶机构的设计要求1.洗瓶机的推瓶机构:平面连杆机构等常用机构或组合机构。
2.推瓶机构应使推头M以接近匀速的速度推瓶,推进距离L=600mm然后推头快速返回原位,准备第二个工作行程。
3.设计组合机构实现运动要求,并对从动杆进行运动分析。
推程时速度要求为45/,返回时的平均速度为工作行程的3倍。
v mm s4.机构的传动性能好,结构紧凑,制造方便。
机械原理课程设计洗瓶机推瓶机构设计(1)

机械原理课程设计洗瓶机推瓶机构设计(1)机械原理课程设计洗瓶机推瓶机构设计一、设计背景洗瓶机在各个行业中有着广泛的应用,其中最为重要的就是在食品、药品等行业中的使用。
而推瓶机则是在生产线中负责将洗干净的瓶子推向下一个工作站的设备。
本文将针对洗瓶机推瓶机构的设计进行探讨。
二、机构设计1. 洗瓶机洗瓶机主要分为进瓶、洗瓶和出瓶三个步骤。
其中,洗瓶是最为重要的一步。
在设计洗瓶机时,应考虑以下几个方面:1)喷水角度和强度:需要根据瓶子的类型、大小和污渍程度来设置。
一般来说,瓶子底部的污渍会更难清洗,因此可以考虑增加底部的喷水头。
2)水的质量:使用纯净的水可以避免瓶子在清洗过程中受到二次污染。
3)瓶子的进出口:需要确保瓶子的进出口与设备的其他部分之间没有摩擦或擦碰,否则可能会导致瓶子损坏。
2. 推瓶机推瓶机主要包括输送链和推瓶板两个部分。
当洗瓶机完成清洗后,瓶子需要被送到下一个工作站。
在推瓶机的设计中,需要考虑以下几个因素:1)输送链的材料和长度:根据瓶子数量和大小来确定输送链的长度,同时需要考虑输送链的材料以确保其强度、耐磨性和耐腐蚀性。
2)推瓶板的设计:推瓶板需要确保瓶子在推动过程中不受到过大的力量或撞击,同时需要考虑瓶子的稳定性,以确保瓶子在推动过程中不会侧倒或倾斜。
3)传动机构的选择:传动机构需要能够将功率有效地输出到输送链和推瓶板中,并保证传动效率高和稳定性好。
三、结论洗瓶机和推瓶机是生产线上不可或缺的机器设备,在设计时需要考虑多方面的因素。
在本文中,我们探讨了洗瓶机和推瓶机的具体设计方案,希望对机械原理课程的学生们有所帮助。
推瓶机 机械原理课程设计

《机械原理课程设计》说明书课程设计题目: 推瓶机设计学院:学号:设计者:指导教师:日期: 2016年1月15日目录1.洗瓶机的工作原理及主要动作1.1.洗瓶机的工作示意图 (1)1.2原始数据 (1)1.3.推瓶机构的设计要求 (1)2.系统功能图 (2)3.推头运动路线的分析 (2)4.方案的设计及分析 (3)4.1方案的设计 (3)4.2方案的分析与决策 (4)5.推瓶机运动简图绘制 (5)6.尺寸综合 (5)6.1机构运动的尺寸分析确定 (5)6.1.1设计推导的公式 (5)6.1.2杆长的确定 (6)6.2分点与推杆的位置与凸轮参数的设计 (7)6.3洗瓶机的运动循环图 (7)7.凸轮的设计和廓线绘制 (8)7.1摆动凸轮的设计 (8)7.2直动凸轮的设计 (9)7.3压力角的检验 (10)7. 4机构尺寸的确定 (10)8.运动参数设计 (10)9.推瓶机动力装置和传动系统的设计. (11)10.心得体会 (12)11.参考文献 (12)1.洗瓶机的工作原理及主要动作洗瓶机如图2.1所示,待洗的瓶子放在两个同向转动的导辊上,导辊带动瓶子旋转。
当推头M把瓶子推向前进时,转动着的刷子就把瓶子外面洗净。
当前一个瓶子将洗刷完毕时,后一个待洗的瓶子已送入导辊待推。
它的主要动作:将到位的瓶子沿着导辊推动,瓶子推动过程中将瓶子旋转以及将刷子转动。
1.1洗瓶机的工作示意图图1.1 洗瓶机工作示意图1.2原始数据①瓶子尺寸:大端直径d=80mm,长200mm。
②推进距离:600mm。
1.3 推瓶机构的设计要求1.洗瓶机的推瓶机构:平面连杆机构等常用机构或组合机构。
2.推瓶机构应使推头M以接近匀速的速度推瓶,推进距离L=600mm然后推头快速返回原位,准备第二个工作行程。
3.设计组合机构实现运动要求,并对从动杆进行运动分析。
推程时速度要求为 ,返回时的平均速度为工作行程的3倍。
45/v mm s4.机构的传动性能好,结构紧凑,制造方便。
洗瓶机推瓶机构设计
洗瓶机推瓶机构设计机械设计综合课程设计说明书洗瓶机推瓶机构设计姓名:班级:学号:指导教师:设计时间:摘要洗瓶设备主要用于制药、化工、食品等行业灌装前的瓶子清洗.机构装置,洗瓶机的推瓶机构的功能利用推头平稳的将瓶子送进的一个过程,在急回到原点,反复运动。
推瓶机构原理是利用铰链四杆机构和凸轮组合成一个洗瓶机推瓶机构,通过凸轮和铰链四杆机构本身特性来完成平稳送瓶和机构急回。
经过多个方案对比分析,确定比较合适方案为凸轮铰链四杆机构,对其进行了参数设计。
本设计对推瓶机构传动系统进行了设计和选择:首先,对洗瓶机推瓶机构的电机、减速器等主要的传动系统进行了设计选择,同时对推瓶机构的凸轮—铰链四杆机构进行了具体参数化设计,使的它的运动状态和运动规律能更好的实现其实际的工作。
最后通过对凸轮的轮廓曲线的调整和对铰链四杆机构杆长的局部修改,使推瓶机构的运动状态、工作行程等更加平稳流畅。
关键词:洗瓶机, 推瓶机构,凸轮机构,铰链四杆机构AbstractBottle washing equipment is mainly used in pharmaceutical, chemical and food industries cleaning before filling. Function push the bottle body mechanism means the use of a washing machine will be a smooth process Tuitou bottle fed, in acute back origin, repeated movement. Push bottle principle mechanism is the use of four-bar linkage hinge and cam be combined into awashing machine to push the bottle body and the hinge cam four-bar mechanism itself features to complete a smooth deliver quick return bottles and institutions. After comparative analysis of a number of options to determine the appropriate solution for cam four hinge mechanism, its design parameters. The design of the bottle body push drive system design and selection: First, the main transmission mechanism push the bottle washing machine motor, reducer made design choices, while pushing the bottle body cam - hinged four-bar mechanism conducted a detailed parametric design, make it the law of the state of motion and movement can better achieve their actual work. Finally, by adjusting the cam profile curve and the four-bar linkage hinge rod length of partial changes push the bottle so that the motion state agencies, such as the working stroke is more stable and smooth. Keywords: washing machine, push the bottle body, cam mechanism, four hinge mechanismKeywords: stamping machine; motor; key; gear目录一、设计题目 (5)二、工作原理 (5)三、原始数据 (5)四、执行部分机构方案设计 (5)4.1分析执行机构的方案 (5)4.2拟定执行机构方案 (7)4.3执行机构运动循环图 (7)五、初定电机转速及传动装置方案 (7)5.1电机转速 (7)5.2传动装置方案 (7)六、执行机构尺寸设计及运动分析 (8)七、传动装置总体设计 (9)八、减速器的选择 (10)九、轴的设计与计算 (11)十、设计小结 (21)十一、参考文献 (21)一、设计题目洗瓶机推瓶机构设计二、工作原理上图是洗瓶机有关部件的工作情况示意图。
机械原理课程设计-洗瓶机推瓶机课程设计[推荐]
![机械原理课程设计-洗瓶机推瓶机课程设计[推荐]](https://img.taocdn.com/s3/m/5edd49de988fcc22bcd126fff705cc1754275f62.png)
机械原理课程设计-洗瓶机推瓶机课程设计[推荐]第一篇:机械原理课程设计-洗瓶机推瓶机课程设计[推荐] 机械创新设计(一)课程设计题目:洗瓶机推瓶机课程设计班级:姓名:学号:指导老师:学校:目录一、总体设计方案1.1设计要求------------2 1.2原始数据和设计要求--3 1.3方案设计------------4二、执行机构的设计1.4机构尺寸及设计------5 1.5运动分析------------6 三、传动机构设计1.6凸轮动力输出装置的减速设计-------------------------7 1.7心得体会(总结)----10 1.8参考文献------------111.1设计要求1)总功能要求和工作原理选择设计,洗瓶机主要由推瓶机构,导辊机构,转刷机构组成。
如图1.1所示,待洗的瓶子放在两个不同转向的导棍上,导辊带动瓶子旋转。
当推头M把瓶子推向前进时,转动的刷子就把瓶子外面洗干净。
当前一个瓶洗刷完毕时,后一个待洗的瓶子已送入导辊待推。
2)为实现功能要求,清洗刷需要转动,瓶子需要转动,瓶子需要沿导棍移动,需要有输送瓶的机构,经过分析机构的设计要求可知:设计的推瓶机构应使推头M以接近均匀速度推瓶。
平稳的接触和脱离瓶子,然后推头快速的返回原位,准备第二个工作循环。
根据设计要求,推头M可走图1.2所使的示意轨迹,而且推头M在工作行程中应做匀速直线运动,在工作前后可有变速运动,回程时有急回。
图1.2 推头M运动轨迹1.2原始数据和设计要求设计推瓶机构时的原始数据和要求为:1)瓶子尺寸:大端直径d=80mm,长200mm。
2)推进距离l=600mm。
推瓶机构应使推头M接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后,推头快速返回原位,准备第二个工作循环。
3)按生产率的要求,推程平均速度为v=45mm/s,返回时平均速度为工作行程的3倍。
4)画出机构运动方案简图(机械运动示意图)5)对机械传动系统和执行机构进行尺寸计算 6)机构传动性能良好,结构紧凑,制造方便1.3方案设计凸轮—铰链四杆机构方案如图1.3所示,铰链四杆机构的连杆2上点M走近似于所要求的轨迹,M点的速度由等速转动的凸轮通过构件3的变速转动来控制,由于此方案的曲柄1是从动件,所以要注意过死点的措施,由于推程有600MM,导致凸轮尺寸太大,整个组合所占体积过大。
机械原理课程设计洗瓶机的推瓶机构 洗瓶机的推瓶机构
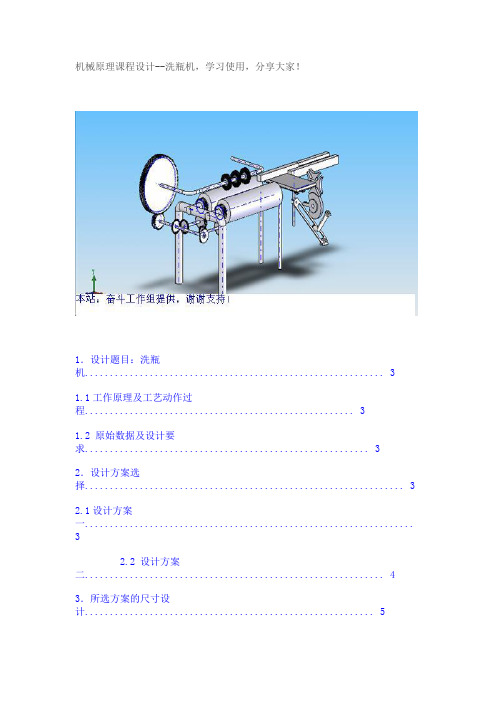
机械原理课程设计--洗瓶机,学习使用,分享大家!1.设计题目:洗瓶机 (3)1.1工作原理及工艺动作过程 (3)1.2 原始数据及设计要求 (3)2.设计方案选择 (3)2.1设计方案一 (3)2.2 设计方案二 (4)3.所选方案的尺寸设计 (5)3.1.1 对于送瓶部分: (5)3.1.2 对于间歇机构 (6)3.1.3 对于轮系 (6)3.2运动循环图 (6)4.所选方案的机构运动运动简图 (7)5. 所选运动方案布置图 (7)5.1 AUTOCAD中作出的构思的方案图 (7)送瓶部分................................................................... . (8)洗瓶部分................................................................... . (8)三维造型图(外层机箱隐藏) (9)上视图................................................................... .. (10)6. 爆炸视图 (10)7.机构的运动学分析 (11)7.1 推瓶部分的速度,加速度分析 (11)7.2 推瓶部分摆杆的输出速度,加速度分析 (11)7.3 推瓶部分的曲柄的速度,加速度分析 (12)8. 小组总结 (12)9. 参考资料 (13)1.设计题目:洗瓶机1.1工作原理及工艺动作过程为了清洗圆形瓶子外面,需将瓶子推人同向转动的导辊上,导辊带动瓶子旋转,推动瓶子沿导辊前进,转动的刷子就将瓶子洗净。
它的主要动作:将到位的瓶子沿着导辊推动,瓶子推动过程利用导辊转动将瓶子旋转以及将刷子转动。
1.2 原始数据及设计要求1)瓶子尺寸。
大端直径d=80 mm,长2OOmm。
2)推进距离l=600mm,推瓶机构应使推头以接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后推头快速返回原位,准备进入第二个工作循环。
机械原理毕业课程设计题目综合
机械原理毕业课程设计题目综合(此文档为word格式,下载后您可任意编辑修改!)第四章课程设计题选§4.1 推瓶机构设计一、设计题目设计洗瓶机的推瓶机构。
图4.1是洗瓶机有关部件的工作情况示意图。
待洗的瓶子放在两个转动着的导辊上,导辊带动瓶子旋转。
当推头M把瓶推向前进时,转动着的刷子就把瓶子外面洗净。
当前一个瓶子将洗刷完毕时,后一个待洗的瓶子已送人导辊待推。
图4.1 洗瓶机有关部件的位置示意图二、原始数据和设计要求设计推瓶机构时的原始数据和要求为(1) 瓶子尺寸:大端直径d=80mm,长200mm。
(2) 推进距离l=600mm。
推瓶机构应使推头M以接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后,推头快速返回原位,准备第二个工作循环。
(3) 按生产率的要求,推程平均速度为v=45mms,返回时的平均速度为工作行程的3倍。
(4) 机构传动性能良好,结构紧凑制造方便。
三、设计方案及讨论根据设计要求,推头M可走图4.2所示轨迹,而且在l=600mm的工作行程中作匀速运动,在其前后作变速远动,回程时有急回运动特性。
对这种运动要求,若用单一的常用基本机构是不容易实现的。
通常,要用若干个基本机构的组合,各司其职,协调动作,才能实现。
在选择机构时,一般先考虑选择满足轨迹要求的机构(基础机构),而沿轨迹运动时的速度要求,则往往通过改变基础机构主动件的运动速度来满足,也就是让它与一个输出变速度的(附加)机构组合。
读者可查找相关资料――“实现预定轨迹的机构选例”,“具有急回特性的机构选例”以及“实现预定轨迹的曲柄摇杆机构连杆曲线图谱”等作为进行本题方案设计时的参考。
了解到怎样组成机构才能得到所需的轨迹和急回运动特性(如机构中作平面运动的构件上的点才可能产生一定的轨迹;又如,要使机构具有急回运动特性,就必须使作匀速运动的主动件在工作行程和空回行程中的转角大小不同),以期对新的构思有所启迪。
实现本题要求的机构方案可以有很多,可用多种机构组合来实现。
机械原理课程设计洗瓶机的推瓶机构

机械原理课程设计说明书设计题目洗瓶机的推瓶机构设计者周凡指导老师李鹏南学院机电工程学院专业材料成型及控制工程班级二班2010年12月30日摘要进入21世纪以来,市场愈加需要各种各样性能优良、质量可靠、价格低廉、效率高、能耗低的机械产品,而决定产品性能、质量、水平、市场竞争能力和经济效益的重要环节是产品设计。
机械产品设计是首要任务是进行机械运动方案的设计和构思、各种传动机构和执行机构的选用和创新设计,这就要求设计者能够综合应用各类典型机构的结构组成、运动原理、工作特点、设计方法及其在系统中的作用等知识,根据使用要求和功能分析选择合理的工艺动作过程,选用或创新机构型式并巧妙地组合新的机械运动方案,从而设计出结构简单、制造方便、性能优良、工作可靠、实用性强的机械产品。
机械原理课程设计就是使学生全面、系统掌握和深化机械原理课程的基本原理和方法的重要环节,是培养学生机械运动方案设计,创新设计以及应用计算机对工程实际中各种机构进行分析和设计能力的一门课程。
其目的如下:1.使学生初步了解机械设计的全过程,受到根据功能需要拟定机械运动方案的训练,具备初步的机构选型,组合和确定运动方案的能力。
2.以机械系统运动方案设计为结合点,把机械原理课程各章的理论和方法融会贯通起来,进一步巩固和加深学生所学的理论知识。
3.使学生掌握机械运动方案设计的内容、方法、步骤,并对动力分析与设计有一个较完整的概念。
4.进一步提高学生运算、绘图以及运用计算机和技术资料的能力。
5.通过编写说明书,培养学生表达、归纳、总结的能力。
6.培养学生综合运用所学知识,理论联系实际,独立思考与分析问题的能力和创新能力目录一.设计题目二.工作原理及工艺动作过程三.原始数据及设计要求四.设计方案选择五.所选方案的尺寸设计六.机构的运动学分析七.总体评价八.设计体会九.参考文献十.附录【设计题目】设计洗瓶机的推瓶机构【工作原理及工艺动作过程】一.工作原理图一洗瓶机有关部件位置示意图如图一所示,待洗的瓶子放在两个同向转动的导辊上,导辊带动瓶子旋转;当推头M把瓶子推向前进时,转动着的刷子就把瓶子外面洗净;当前一个瓶子将洗刷完毕时,后一个待洗的瓶子已送入导辊待推。
机械原理课程洗瓶机推瓶机构设计

优化洗瓶机推瓶机构的 设计,提高生产效率并 实现快速的瓶子推瓶。
3 耐久性
选择耐久且经久耐用的 材料,以保证洗瓶机推 瓶机构的长时间运行。
机构设计的关键要素
传动装置
选择合适的传动装置,如电 机和齿轮,以提供足够的推 力和运动。
导向系统
设计有效的导向系统,确保 瓶子在推瓶过程中保持正确 的位置和方向。
传送装置
使用合适的传送装置,如传 送带或滚轮,以确保平稳而 连续的瓶子进出。
实际设计案例分析
案例一:小型洗瓶机
针对小型工厂和实验室设计的紧凑型洗瓶机推瓶 机构,适用于小批量生产。
案例二:工业级洗瓶机
针对大规模生产的工业级洗瓶机推瓶机构,具备 高效率和稳定性。
结论和展望
通过深入了解洗瓶机推瓶机构设计的背景、工作原理和设计要素,我们可以 设计出高效、稳定且耐久的洗瓶机推瓶机构,为洗瓶过程提供卓越的解决方 案。
洗瓶机推瓶机构的工作原理
1
瓶子进入
瓶子通过传送带进入洗瓶机,等待被推入下一个工作阶段。
2
推瓶机构
推瓶机构通过运动构件对瓶子进行推动,使其顺利进入下一个处理环节。
3
瓶子退出
经过清洗和处理后,瓶子从洗瓶机中退出,并继续进入后续的生产流程。
机构设计的基本原则
1 稳定性
2 效率
确保洗瓶机推瓶机构的 稳定性,以避免瓶子推 瓶过程中的倾斜或堵塞。
机械原理课程洗瓶机推瓶 机构设计
开启你的洗瓶机设计之旅!在本课程中,我们将探讨洗瓶机推瓶机构设计的 背景、目标和要求、工作原理以及设计的基本原则和关键要素。
洗瓶机推瓶机构设计的背景
了解洗瓶机推瓶机构设计的历史和背景,从传统的手动推瓶机到现代自动化 的洗瓶机机构设计。
推瓶机构的课程设计

推瓶机构的课程设计一、引言推瓶机构,即为传统教育中的教学设计概念的一种创新形式,它将学习者置于主动学习的角色中,鼓励他们通过实践和探索来获取知识和技能。
推瓶机构的课程设计是为了满足学习者的需要,帮助他们在兴趣驱动和自主学习的环境中充分发展。
在本文中,我将探讨推瓶机构的课程设计,从其基本原则和步骤到如何创造引人注目的学习体验。
我也将分享一些个人对这个主题的观点和理解。
二、推瓶机构的原则和步骤1. 自主学习的原则推瓶机构的课程设计建立在自主学习的基础上,它鼓励学习者独立思考、主动探索和解决问题。
一个好的推瓶机构课程设计应具备以下原则:(1)学习者至关重要:推瓶机构将学习者置于中心位置,将学习者的需求、兴趣和目标作为课程设计的核心。
(2)以问题为导向:课程设计应以问题为导向,激发学习者的思考和探索欲望,帮助他们解决实际问题。
(3)学习活动多样化:通过多样化的学习活动,如小组合作、项目制作、实地考察等,推瓶机构可以激发学习者的学习动力和创造力。
2. 推瓶机构课程设计的步骤推瓶机构的课程设计通常包括以下步骤:(1)需求分析:了解学习者的兴趣、需求和目标,确定一个适应学习者特点的课程主题。
(2)目标设定:根据学习者的需求和目标,制定明确的学习目标,帮助学习者理解他们将通过课程学到什么。
(3)学习活动设计:以问题为导向,设计多样化的学习活动,激发学习者的兴趣和主动学习的动力。
(4)资源准备:准备符合课程主题的相关资源,包括教材、工具和实践机会,为学习者提供必要的支持。
(5)评估和反馈:设计有效的评估方法,了解学习者的学习效果,并及时提供反馈和指导。
三、创造引人注目的学习体验为了创造引人注目的学习体验,推瓶机构的课程设计可以采用以下方法:1. 故事化设计:将课程内容融入有趣的故事情节中,激发学习者的兴趣和好奇心,让他们在实践和探索中学习。
2. 社交学习:鼓励学习者进行小组合作,通过互动和合作来学习和解决问题。
这不仅可以增强学习动力,还可以提高学习效果。
洗瓶机的推瓶机构机械原理课程设计
洗瓶机的推瓶机构机械原理课程设计1. 引言本文档旨在介绍洗瓶机的推瓶机构的机械原理课程设计。
洗瓶机是行业中常见的设备之一,用于在生产线上对瓶子进行清洗和消毒。
推瓶机构是洗瓶机中的关键部件之一,它负责将瓶子从一个位置推入清洗区域。
本文将通过分析推瓶机构的机械原理,设计一个具有高效、稳定和可靠性能的推瓶机构。
2. 设计背景推瓶机构在洗瓶机中起着重要的作用,它直接影响了整个清洗过程的效率和稳定性。
因此,设计一个合理的推瓶机构对于提高洗瓶机的工作效率和质量至关重要。
3. 机械原理分析推瓶机构的设计需要基于机械原理进行分析和优化。
下面是对推瓶机构常用的机械原理进行的分析:3.1 杠杆原理推瓶机构中的杠杆原理可以通过设计合适的杆件长度和杆件支撑点位置,来实现推瓶的力量放大和力度调节。
杠杆原理能够有效地减小所需的推瓶力量,提高推瓶机构的效率。
3.2 连杆原理推瓶机构中的连杆原理涉及到连杆的作用和连接方式。
适当选择连杆的长度和连接方式,可以使推瓶机构具有更好的稳定性和工作效率。
3.3 轮齿原理推瓶机构中的轮齿原理可以通过设计合适的齿轮和传动装置,来实现推瓶的运动。
合理的齿轮设计可以提高推瓶机构的传动效率和精度。
4. 推瓶机构设计基于上述机械原理的分析,我们将设计一个高效、稳定和可靠的推瓶机构。
下面是推瓶机构的设计方案:4.1 结构设计推瓶机构的结构设计需要考虑推瓶力量、稳定性和运动效率。
我们将采用杠杆原理,通过合理选择杆件长度和支撑点位置,来实现推瓶力量的放大和调节。
同时,根据连杆原理的要求,采用适当的连杆长度和连接方式,保证推瓶机构的稳定性。
4.2 传动设计推瓶机构的传动设计需要保证推瓶的运动平稳和精确。
我们将采用齿轮传动装置,选择合适的齿轮大小和传动比,来实现推瓶机构的传动效率和精度。
4.3 控制设计推瓶机构的控制设计需要考虑推瓶的速度和位置控制。
我们将采用电机作为推瓶机构的驱动力源,通过合理的电机控制和传感器反馈,实现对推瓶的速度和位置的控制。
机械原理课程洗瓶机推瓶机构设计
此机构具有很多优点
具有一般齿轮机构的特点,即传动效率高、传动比准确、工作安全可靠等。 可以通过计算准确得到输出齿轮的转速,进而得到齿条的准确运动速度。 可以通过两个不完全齿轮的齿数比来得到推程和回程时的速度比。 此机构的输出齿轮虽然在一个运动周期内存在正转和反转两个方向的转动,但因为运动周期较长、转速较小,不会产生很大的冲击。
度为v=45mm/s,返回的平均速度为工作行程三倍。
子尺寸:大端直径D=80mm,长200mm,小端直径d=25mm,(如附下图所示)
第二个工作循环。(3) 按生产率的要求,推程平均速
机构传力性能良好,结构紧凑,制造方便。
”
机械原理课程设计 ——洗瓶机
设计题目与要求
设计题目:洗瓶机 工作原理及工艺动作过程 为了清洗圆形瓶子外面,需将瓶子推人同向转动的导辊上,导辊带动瓶子旋转,推动瓶子沿导辊前进,转动的刷子就将瓶子洗净。 它的主要动作:将到位的瓶子沿着导辊推动,瓶子推动过程利用导辊转动将瓶子旋转以及将刷子转动。
在此机构的基础上,可以通过一 系列的变化来实现要求的机构运动特性。
不完全齿轮机构
如图所示机构,由处在同一轴上的两个不完全齿轮(齿轮1 1′)来实现齿轮2在一个周期内有正反两个方向的转动;输出到与齿轮2同轴的齿轮,通过齿轮齿条的啮合,即得到齿条回程运动速度为推程运动速度的3倍,具有急回运动特性。
洗瓶机构
PART 01
。
原始数据及设计要求
瓶子尺寸。大端直径d=80 mm,长2OOmm。 推进距离l=600mm,推瓶机构应使推头以接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后推头快速返回原位,准备进入第二个工作循环。 按生产率的要求,推程平均速度为u=45mm,返回时的平均速度为工作行程平均速度的3倍。 机构传动性能良好,结构紧凑,制造方便。
推瓶机构课程设计

推瓶机构课程设计引言推瓶机构作为一种常见的自动售货机设备,能够自动将瓶装饮料送出。
在如今快节奏的生活中,推瓶机构的功能和方便性受到了广大消费者的喜爱和需求。
本文将对推瓶机构的课程设计进行详细探讨,包括设计原则、功能需求、系统架构、技术实现以及未来的发展方向等。
设计原则在推瓶机构的课程设计中,有几个基本的设计原则需要遵循。
用户体验为中心推瓶机构的设计应以用户体验为中心。
用户在购买体验过程中,应感到便利、快捷和舒适。
设计师需要从用户的角度出发,考虑用户的需求并提供相应的功能,让用户在使用推瓶机构过程中能够获得良好的体验。
技术可行性推瓶机构的设计需要考虑到技术可行性。
设计师需要了解现有的技术水平和设备,并结合需求确定推瓶机构可以实现的功能。
同时,需考虑设备的可靠性、稳定性和维护成本,以确保推瓶机构能够可持续运行。
系统可扩展性推瓶机构的设计要具备一定的可扩展性,以适应未来的需求变化和技术进步。
在设计过程中,应将未来的需求和发展方向考虑在内,为后续的升级和改进留出空间。
功能需求推瓶机构的功能需求主要包括以下几个方面。
自动售卖推瓶机构作为自动售货机,其主要功能是自动售卖瓶装饮料。
用户通过选择商品、支付和取货等步骤完成购买过程。
设计师需要确保推瓶机构能够准确可靠地进行商品的售卖,并能够接受多种支付方式,如现金、刷卡、移动支付等。
库存管理推瓶机构的库存管理是其重要的功能之一。
需要实时监测和管理机内商品的库存情况,当库存数量低于设定值时,需要及时提醒运维人员进行商品的补货。
同时,需要记录和统计商品的销售情况,以便进行经营分析和决策。
故障报警推瓶机构的故障报警功能是保证机器能够正常运行的重要保障。
当推瓶机构发生故障时,需要能够自动报警,并提供详细的故障信息,以便运维人员及时进行维修和处理。
系统架构推瓶机构的系统架构包括硬件和软件两个方面。
硬件架构推瓶机构的硬件包括机身、货道、显示屏、支付设备等。
机身是推瓶机构的主体部分,用于容纳货物和进行交互。
推瓶机构课程设计

推瓶机构课程设计一、推瓶机构概述推瓶机构是一种常见的装瓶设备,主要用于将瓶子从输送带上推入灌装机或封口机中。
它由驱动装置、传动装置、导向装置和推杆组成。
推瓶机构的设计直接影响着生产效率和产品质量。
二、课程设计目标本次课程设计旨在让学生通过对推瓶机构的了解和分析,掌握以下技能:1. 理解推瓶机构的工作原理和结构特点;2. 掌握推瓶机构的设计流程和方法;3. 能够根据不同生产需求,进行推瓶机构的优化设计。
三、课程内容1. 推瓶机构的工作原理(1)介绍推瓶机构的基本组成部分:驱动装置、传动装置、导向装置和推杆;(2)详细讲解每个部分的作用及其相互关系;(3)演示实际操作过程,让学生亲身体验其工作原理。
2. 推瓶机构的结构特点(1)介绍不同类型的推瓶机构及其特点;(2)详细讲解各个部分的结构特点及其对机构性能的影响;(3)通过实例分析,让学生理解推瓶机构的结构设计与性能之间的关系。
3. 推瓶机构的设计流程和方法(1)介绍推瓶机构的设计流程:需求分析、方案设计、结构优化等;(2)详细讲解每个步骤需要注意的问题和解决方法;(3)通过实例演示,让学生掌握推瓶机构的设计流程和方法。
4. 推瓶机构的优化设计(1)介绍推瓶机构在实际生产中可能遇到的问题及其原因;(2)详细讲解如何通过优化设计来解决这些问题;(3)通过实例演示,让学生掌握推瓶机构的优化设计方法。
四、课程教学方法本课程采用多种教学方法,包括:1. 讲授:老师主要通过PPT和黑板讲解推瓶机构相关知识点,同时提供实物展示进行演示。
2. 实践:老师将提供实际操作过程,让学生亲身体验其工作原理。
3. 研究:老师将提供相关案例,并引导学生进行研究和讨论。
4. 课程设计:老师将组织学生进行推瓶机构的设计,包括需求分析、方案设计、结构优化等。
五、课程评估本课程评估主要包括以下几个方面:1. 考试:为了检验学生对推瓶机构相关知识点的掌握情况,将进行笔试考试。
2. 实践操作:为了检验学生对推瓶机构实际操作的掌握情况,将进行实践操作考核。
推瓶机构课程设计双凸轮
推瓶机构课程设计双凸轮一、教学目标本课程旨在让学生了解和掌握推瓶机构课程设计双凸轮的相关知识,培养学生对机械设计的基本认识和兴趣。
在知识目标方面,学生需要理解双凸轮的结构、工作原理和设计方法;在技能目标方面,学生应掌握双凸轮机构的设计流程,能够运用相关知识解决实际问题;在情感态度价值观目标方面,学生应培养对机械设计的热爱,提高创新意识和实践能力。
二、教学内容本课程的教学内容主要包括双凸轮的结构与工作原理、设计方法、应用案例等。
具体安排如下:1.双凸轮的结构与工作原理:介绍双凸轮的基本结构、工作原理和运动特性,使学生了解双凸轮机构的工作原理。
2.双凸轮的设计方法:讲解双凸轮的设计方法,包括凸轮轮廓曲线的设计、凸轮参数的确定等,让学生掌握双凸轮机构的设计方法。
3.双凸轮的应用案例:分析双凸轮机构在实际工程中的应用案例,使学生了解双凸轮机构在实际工程中的重要作用。
三、教学方法为了激发学生的学习兴趣和主动性,本课程将采用多种教学方法,如讲授法、讨论法、案例分析法、实验法等。
在教学过程中,教师应以学生为主体,注重启发式教学,引导学生主动探索、积极思考。
四、教学资源为了支持教学内容和教学方法的实施,丰富学生的学习体验,我们将选择和准备以下教学资源:1.教材:《机械设计基础》等相关教材,为学生提供理论知识的学习材料。
2.参考书:推荐学生阅读相关参考书籍,扩展知识面。
3.多媒体资料:制作课件、视频等多媒体资料,帮助学生更直观地理解双凸轮机构的工作原理和设计方法。
4.实验设备:准备相关的实验设备,开展实验教学,使学生更好地了解和掌握双凸轮机构的实际应用。
五、教学评估为了全面反映学生的学习成果,本课程将采用以下评估方式:1.平时表现:评估学生在课堂上的参与度、提问回答、小组讨论等,以了解学生的学习态度和理解程度。
2.作业:布置相关的设计练习和报告,评估学生的知识运用和解决问题的能力。
3.考试:进行期中和期末考试,以检验学生对双凸轮机构知识的掌握程度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机械原理课程设计》说明书课程设计题目: 推瓶机设计学院:学号:设计者:指导教师:日期: 2016年1月15日目录1.洗瓶机的工作原理及主要动作1.1.洗瓶机的工作示意图 (1)1.2原始数据 (1)1.3.推瓶机构的设计要求 (1)2.系统功能图 (2)3.推头运动路线的分析 (2)4.方案的设计及分析 (3)4.1方案的设计 (3)4.2方案的分析与决策 (4)5.推瓶机运动简图绘制 (5)6.尺寸综合 (5)6.1机构运动的尺寸分析确定 (5)6.1.1设计推导的公式 (5)6.1.2杆长的确定 (6)6.2分点与推杆的位置与凸轮参数的设计 (7)6.3洗瓶机的运动循环图 (7)7.凸轮的设计和廓线绘制 (8)7.1摆动凸轮的设计 (8)7.2直动凸轮的设计 (9)7.3压力角的检验 (10)7. 4机构尺寸的确定 (10)8.运动参数设计 (10)9.推瓶机动力装置和传动系统的设计. (11)10.心得体会 (12)11.参考文献 (12)1.洗瓶机的工作原理及主要动作洗瓶机如图2.1所示,待洗的瓶子放在两个同向转动的导辊上,导辊带动瓶子旋转。
当推头M把瓶子推向前进时,转动着的刷子就把瓶子外面洗净。
当前一个瓶子将洗刷完毕时,后一个待洗的瓶子已送入导辊待推。
它的主要动作:将到位的瓶子沿着导辊推动,瓶子推动过程中将瓶子旋转以及将刷子转动。
1.1洗瓶机的工作示意图图1.1 洗瓶机工作示意图1.2原始数据①瓶子尺寸:大端直径d=80mm,长200mm。
②推进距离:600mm。
1.3 推瓶机构的设计要求1.洗瓶机的推瓶机构:平面连杆机构等常用机构或组合机构。
2.推瓶机构应使推头M以接近匀速的速度推瓶,推进距离L=600mm然后推头快速返回原位,准备第二个工作行程。
3.设计组合机构实现运动要求,并对从动杆进行运动分析。
推程时速度要求为v mm s,返回时的平均速度为工作行程的3倍。
45/4.机构的传动性能好,结构紧凑,制造方便。
5.编写设计说明书。
2.系统功能图推杆匀速推瓶减速返回 待洗瓶子放入 导辊带动瓶子转动加速返回 推瓶完成 刷子旋转洗瓶3. 推头运动路线的分析分析设计要求可知:洗瓶机主要由推瓶机构、导辊机构、转刷机构组成。
设计的推瓶机构应使推头M 以接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后,推头快速返回原位,准备第二个工作循环.在运动中,两个导辊以恒定的转速转动,带动瓶子转动;刷子也以恒定的转速转动;推进距离:推杆机构带动的M 点推进距离为600mm 。
推程时速度要求为45/v mm s ,返回时的平均速度为工作行程的3倍。
根据设计要求,推头M 可走图2.4所示轨迹,而且推头M 在工作行程中应作匀速直线运动,在工作段前后可有变速运动,回程时有急回。
由此可根据其运动轨迹选择推瓶机构的设计方案。
应该选择具有急回运动特性的机构。
图3.1 推头M 运动轨迹对这种运动要求,若用单一的常用机构是不容易实现的,通常要把若干个基本机构组合,起来,设计组合机构。
在设计组合机构时,一般可首先考虑选择满足轨迹要求的机构(基础机构),而沿轨迹运动时的速度要求,则通过改变基础机构主动件的运动速度来满足,也就是让它与一个输出变速度的附加机构组合。
4.方案的设计与分析决策4.1方案的设计根据推头的运动轨迹分析得知推瓶机构主要是控制推头做推瓶和急回运动,故选择机构方案可从能实现急回运动的机构考虑。
根据已学知识得知能做急回运动的机构有曲柄滑块机构,凸轮机构,和连杆组合机构等。
他们各自有自己的特点。
通过综合考虑列出如下机构作为参考方案:方案一:如图4.1,所示凸轮一铰链四杆机构的连杆2上的M点能基本实现所要求的轨迹.图4.1方案二:如图 4.2,该方案的的运动由凸轮机构和四杆机构协调运动完成,这种组合可以很好的对推头进行控制,不仅结构简单,体积小,安装后便于调试,从经济上也比较合适图4.1 双凸轮连杆组合机构4.2 方案的分析与决策方案一中机构由凸轮四杆机构组成,凸轮为原动件,通过滚子及连杆带动机构做运动。
其急回特性由凸轮控制。
在该方案中有5个活动构件,其中有一个高副,自由度为1,有确定的运动。
但是它的杆比较多,容易产生误差,不能实现精确的运动。
方案二的运动由凸轮机构和四杆机构协调运动完成,这种组合可以很好的对推头进行控制,不仅结构简单,体积小,安装后便于调试,从经济上也比较合适。
其中凸轮轴能很好的协调推头的运动而且工作平稳。
其缺点是四杆机构的低副之间存在间隙,会产生累计误差。
要准确的实现给定运动规律及运动轨迹,凸轮机构是首选,因为盘形凸轮轮廓就是根据从动件运动规律来设计的,而任意平面轨迹总可以用X=x(ϕ)Y=y(ϕ)表示,因此把两个凸轮机构组合起来就可以准确实现轨迹。
而四杆机构在运动规律、运动轨迹设计中是用逼近的办法来做的,所以较难准确实现。
在方案中,利用了两个凸轮分别控制X和Y方向上的运动,且连杆不是很多,设计中要求速度也不是很快,所以该方案比较准确。
5.推瓶机运动简图绘制6.尺寸综合6.1.1设计推导的公式1l L M ---+=1l 1cos ϕ2cos ϕL +x M =y M L l =+212sin sin ϕϕ211112122sin 2cos 2L l M l M l M M y x y x =--++ϕϕ0sin cos 11=++C B A ϕϕ311211'11113'30'3032112113211111222212122211sin tan )cos (cos sin arctan ,sin sin cos cos cos sin arctan arctan 2,2,2l l l E l l E l l l sr l l s r l l EL l l l l l M l M CA C AB B l M M LC l M B l M A x y y x y x -+-=--+=+=++=+=++=+--=--+±=---===----ϕϕϕϕϕϕϕϕϕϕθϕϕϕϕ其中:6.1.2杆长的设计及确定1.为了满足传动角的一定要求可以初步设计确定杆在两个特殊位置(推头位移最大和最小时,并且最大与最小的差值大于等于600mm )所形成的这一夹角所在的范围。
2.杆长l 2与中心距和基圆大小有关,根据压力角的范围可以大概设计出杆l2的长度。
3.同理杆l 3的杆长与另外一个凸轮的基圆有关系,同样在保证满足压力角的许可范围设计杆l 3的长度。
4.根据凸轮压力角和基圆半径的关系,使压力角在许用范围内。
根据前述推导公式可计算得L=900mm l 1=700mm l 3=600mm l 2=135mm1ϕ=133º 2ϕ=26º 3ϕ=47ºE=200mm F=140mm6.2分点和推杆的位置及凸轮参数的设计分点和推杆的位置图设计中要求推杆在推进过程中的速度为45mm/s,推进行程为600mm,然后做急回运动,工作条件为轻载有急回,因此由推杆和凸轮的的运动规律,设计如下的参数:摆动凸轮:直动凸轮:6.3.洗瓶机的运动循环图洗瓶机的运动循环图如下:7.凸轮的设计与廓线的绘制7.1. 摆动凸轮的设计摆动凸轮的位移线图:根据位移线图画出的凸轮的廓线:7.2.直动凸轮的设计直动凸轮的位移线图如下:由位移线图画出的凸轮廓线如下:7.3 压力角的检验实际设计中规定压力角的许用值[ɑ]。
对摆动从动件,通常取[ɑ]=30º,对于直动从动件,通常取[ɑ]=35º—45º。
回程程时,由于推杆运动是力封闭的,不存在自锁的问题,所以压力角的许用[ɑ]=70º-80º,滚子接触、润滑良好和支撑有较好刚性时取数据上限否则取下限。
现通过移动从动件和摆动从动件凸轮廓线中可以得出:移动从动件在运动中最大压力角ɑ=21º<[ɑ];摆动从动件在一个周期内的最大压力角ɑ=15º<[ɑ]。
7.4机构尺寸的确定8.运动参数设计已知,推程中V=45mm/s,回程时V=135mm/s,所以整个运动周期为:T=t(推程)+t(回程),所以周期约为T=16.30s,所以凸轮的角速度为0.368rad/s.9.推瓶机动力装置和传动系统的设计9.1动力装置的选用因为在推瓶机的运动为轻载有急回的运动,因此查电动机参数对照表后,选用功率为0.75kw,转速为910rad/min的电动机。
9.2传动系统的设计电动机的转速为910rad/min,即15.16rad/s,而凸轮所需的转速为0.368rad/s.因此从电动机到凸轮的传动过程中需要对电动机的转速进行减速,减速的传动比为i=15.16/0.368=41.2.设计为三级减速.传动系统的示意图如下:传动系统的齿轮参数:10.心得体会在这一周的的课程设计中,我从一开始学习设计推杆,凸轮,查找资料,确定机构它们的参数;然后利用用制图画运动简图,凸轮的位移线图,凸轮的轮廓线图等,最后检验我设计的参数是否合理。
在这一周的课程设计中,我学会了把课本上的知识与实际得运用。
课本上的很多知识都很抽象,比如凸轮的轮廓线和基圆半径的确定等一些凸轮的参数的计算公式,计算起来也很繁琐,需利用电脑软件计算,通过对这些公式的运用,加深了我对这些知识的理解。
通过用CAD 画凸轮的廓线,让我更加清晰的认识凸轮的工作原理,同时也锻炼了我的计算机绘图的能力。
在设计中,摆动凸轮的设计比较难。
11.参考文献1.《机械原理》——孙恒,陈作模,葛文杰主编-高等教育出版社2《机械原理课程设计指导书》——戴娟主编-高等教育出版社。