5.3 模拟相乘器及基本单元电路
模拟乘法器作用及电路
模拟乘法器作用及电路案场各岗位服务流程销售大厅服务岗:1、销售大厅服务岗岗位职责:1)为来访客户提供全程的休息区域及饮品;2)保持销售区域台面整洁;3)及时补足销售大厅物资,如糖果或杂志等;4)收集客户意见、建议及现场问题点;2、销售大厅服务岗工作及服务流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
班中工作程序服务流程行为规范迎接指引递阅资料上饮品(糕点)添加茶水工作要求1)眼神关注客人,当客人距3米距离时,应主动跨出自己的位置迎宾,然后侯客迎询问客户送客户注意事项15度鞠躬微笑问候:“您好!欢迎光临!”2)在客人前方1-2米距离领位,指引请客人向休息区,在客人入座后问客人对座位是否满意:“您好!请问坐这儿可以吗?”得到同意后为客人拉椅入座“好的,请入座!”3)若客人无置业顾问陪同,可询问:请问您有专属的置业顾问吗?,为客人取阅项目资料,并礼貌的告知请客人稍等,置业顾问会很快过来介绍,同时请置业顾问关注该客人;4)问候的起始语应为“先生-小姐-女士早上好,这里是XX销售中心,这边请”5)问候时间段为8:30-11:30 早上好11:30-14:30 中午好 14:30-18:00下午好6)关注客人物品,如物品较多,则主动询问是否需要帮助(如拾到物品须两名人员在场方能打开,提示客人注意贵重物品);7)在满座位的情况下,须先向客人致歉,在请其到沙盘区进行观摩稍作等待;阶段工作及服务流程班中工作程序工作要求注意事项饮料(糕点服务)1)在所有饮料(糕点)服务中必须使用托盘;2)所有饮料服务均已“对不起,打扰一下,请问您需要什么饮品”为起始;3)服务方向:从客人的右面服务;4)当客人的饮料杯中只剩三分之一时,必须询问客人是否需要再添一杯,在二次服务中特别注意瓶口绝对不可以与客人使用的杯子接触;5)在客人再次需要饮料时必须更换杯子;下班程序1)检查使用的工具及销售案场物资情况,异常情况及时记录并报告上级领导;2)填写物资领用申请表并整理客户意见;3)参加班后总结会;4)积极配合销售人员的接待工作,如果下班时间已经到,必须待客人离开后下班;1.3.3.3吧台服务岗1.3.3.3.1吧台服务岗岗位职责1)为来访的客人提供全程的休息及饮品服务;2)保持吧台区域的整洁;3)饮品使用的器皿必须消毒;4)及时补充吧台物资;5)收集客户意见、建议及问题点;1.3.3.3.2吧台服务岗工作及流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
用模拟乘法器做的有效值检测电路
用模拟乘法器做的有效值检测电路你们知道吗?在我们的生活里呀,有好多好多的电信号。
就像我们家里的电灯,它通电的时候就有电流在电线里跑来跑去,这个电流的大小是一直在变化的呢。
那怎么知道这个变化的电流到底有多“厉害”呢?这就需要有效值检测电路啦。
想象一下,我们有一个小盒子,这个小盒子就是模拟乘法器。
这个小盒子就像一个神奇的小助手。
比如说,我们把一个像波浪一样高低起伏的电信号送进这个小盒子里。
这个电信号就像海上的波浪,一会儿高一会儿低。
这个模拟乘法器小盒子会怎么做呢?它会把这个波浪一样的电信号自己和自己相乘。
这就好比是把这个波浪的高度自己和自己相乘。
如果这个波浪很高,那乘出来的结果就会很大;如果波浪比较低,乘出来的结果就会比较小。
我给你们举个例子吧。
就像我们搭积木,我们有一些小积木块,这些小积木块就像电信号的一小部分。
如果我们有一个很高的积木堆,就像一个很大的电信号,当我们把这个积木堆自己和自己堆在一起(就像相乘一样),那得到的就是一个很大很大的积木组合。
如果是一个比较矮的积木堆,自己和自己堆在一起得到的组合就比较小。
然后呢,这个小盒子还会做一些其他的小魔法。
它会把乘出来的结果再经过一些小处理。
这个处理就像是把我们搭好的积木组合按照一定的规则重新摆放一样。
最后呀,从这个小盒子里出来的结果就能告诉我们这个电信号的有效值啦。
这个有效值有什么用呢?它就像是这个电信号的一个小名片。
我们可以根据这个有效值知道这个电信号的能量有多大。
就好像我们知道一个小皮球能弹多高,是因为我们知道这个小皮球有多少能量一样。
如果我们知道了电信号的有效值,我们就能更好地控制家里的电器啦。
比如说,我们可以知道什么时候给手机充电是最安全的,因为我们知道了电的有效值的大小。
乘法器及其应用电路
乘法器是反相型,ui≥0。
仅介绍几种基本运算电路。
1. 乘方运算
a) ui
K
uo
uo= Kui2
b) ui
K
K
uo
uo= Kui3
第六章 集成运算放大器及其应用
2. 除法运算
由反相输入端得
ui1 u2
R1
R2
由乘法器 u2= Kuoui2
uo
R2 KR1
ui1 ui2
为保证引入负反馈:
u2 K
R2
ui1
R1
Rp
− +
+
第六章 集成运算放大器及其应用
乘法器及其应用电路
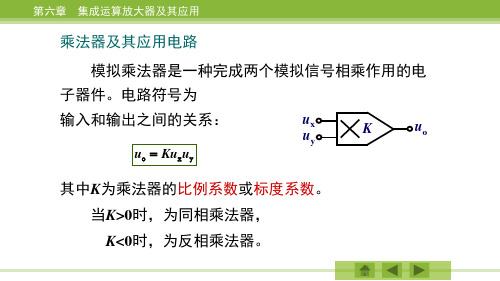
模拟乘法器是一种完成两个模拟信号相乘作用的电
子器件。电路符号为
输入和输出之间的关系:
uo Kuxuy
ux uy
K
uo
其中K为乘法器的比例系数或标度系数。 当K>0时,为同相乘法器, K<0时,为反相乘法器。
第六章 集成运算放大器及其应用
利用模拟乘法器和集成运放相组合,通过各种不同的外 接电路,可组成乘方、除法及开方等运算电路,还可组成各 种函数发生器、调制解调器和锁相环电路等。
ui2 uo
若乘法器为同相型,则ui2≥0。ui1可正可负,故此电路为二 象限的除法器。
第六章 集成运算放大器及其应用
3. 开方运算
由反相输入端得 ui u2
R1
R2
u2 K
R2
由乘法器 u2 Kuo2
ui
R1
−
uo R2 KR1ui NhomakorabeaRp
+ +
Gilbert cell
EC ic1 RC VT1 ux ube1 Io uy ube3 VT3 RE uo VT2 ube2 ic2 RC
恒流源电流I 恒流源电流 o为: I o = R ,VT1、y>0) 根据晶体三极管特性, (u VT) 根据晶体三极管特性 2 E 集电极电流为: 集电极电流为: 输出电压u 输出电压uo为 :
或Z=kX·Y
式中: 为增益系数或标度因子 为增益系数或标度因子, 式中:k为增益系数或标度因子, 1 单位: V − 1 或 ,k的数值与乘法器的电路参数有关。 单位: 的数值与乘法器的电路参数有关。
V
返回 继续
一、乘法器的工作象限 乘法器有四个工作区域,可由它的两个输入电压的极性确定。 乘法器有四个工作区域,可由它的两个输入电压的极性确定。 Y 输入电压可能有四种极性组合: 输入电压可能有四种极性组合 : X Y Z Ymax (+) · (+) = (+) 第Ⅰ象限 ) ) ) -Xmax Xmax X (-) · (+) = (-) 第Ⅱ象限 ) ) ) (-) · (-) = (+) 第Ⅲ象限 ) ) ) -Ymax (+) · (-) = (-) 第Ⅳ象限 ) ) ) 如果:两个输入信号只能为单极性的信号的乘法器为“ 如果:两个输入信号只能为单极性的信号的乘法器为“单 象 限乘法器” 一个输入信号适应两种极性, 限乘法器”;一个输入信号适应两种极性,而一个只能是一种 单 二、理想乘法器的基本性质 极性的乘法器为“二象限乘法器” 两个输入信号都能适应正、 极性的乘法器为“二象限乘法器”; 两个输入信号都能适应正、 1、乘法器的静态特性 “四象限乘法器”。 负两种极性的乘法器为“ 负两种极性的乘法器为 四象限乘法器” 、 (1) 当 X = 0 ,Y 为任意值时 , Z = 0 ) X 为任意值 ,Y = 0时 , Z = 0
模拟乘法器及其在运算电路中的应用
ui
Kxy
x y
uo1 Ku2 i
x y
Kxy
uo Ku
2
i
uo K 2 u 3 i
当ux = uy时,乘法器实现平方运算,其输出与输入信号 之间为非线性关系。
K ux uy uo
ux =UREF
uo = Kux uy = KU REF uy
9.4
模拟乘法器
ux uy
K
K
uo
(a) 国标符号
ux uy
uo
(b) 常用符号 模拟乘法器符号
比例因子K具有V-1的量纲。
uo =Kux uy
9.4
ux uy
模拟乘法器
uo =Kux uy
K
K
uo
ux uy
uo
uy (II) ux<0 uy>0 ux<0 (III) uy<0 O ux>0 (I) uy>0 ux>0 uy<0 (IV) ux
9.4.1 模拟乘法器的基本原理
1. 变跨导型模拟乘法器
+VCC
Rc Rs
ic1
+
+
uo
Rc
-
ic2
VT1
-
Rs
ux
-
+
u BE1
VT 2
-
u+ BE2
+
ic3 Io VT3
Re -VEE
uy
-
变跨导型模拟乘法器
2. 对数反对数型模拟乘法器
ux
k1lnux
对数运算电路
uy
对数运算电路
k1lnuy
加 法 运 算
模拟乘法器及其在运算电路中的应用
加 法 运 算
k2k1ln(uxuy)
k3k2k1(uxuy) 反对数运算电路
uo
对数反对数型模拟乘法器
uO Kuxuy
比例因子 K k1k2 k3
9.4.3 模拟乘法器的应用
1. 乘法运算
ux U1 cos(1t 1 )
uO = Ku X uY
K ux uy uo
uy U 2 cos(2t 2 )
模拟乘法器的工作区域
ui
Kxy
x y
ui
Kxy
x y
uo1 Ku2 i
x y
Kxy
uo Ku
2
i
uo K 2 u 3 i
当ux = uy时,乘法器实现平方运算,其输出与输入信号 之间为非线性关系。
K ux uy uo
ux =UREF
uo = Kux uy = KU REF uy
KU1U2 uo = cos cos 1 2 t 1 2 1 2 t 1 2 2
接入低通滤波器,抑制高频分量
1 2
1 uo KU1U 2 cos 1 2 2
2. 除法运算
Kuy
K
K
uo
(a) 国标符号
ux uy
uo
(b) 常用符号 模拟乘法器符号
比例因子K具有V-1的量纲。
uo =Kux uy
9.4
ux uy
模拟乘法器
uo =Kux uy
K
K
uo
ux uy
uo
uy (II) ux<0 uy>0 ux<0 (III) uy<0 O ux>0 (I) uy>0 ux>0 uy<0 (IV) ux
电子信息工程技术《模拟乘法器基本原理》

12.5 模拟乘法器的基本原理
乘法器是又一种广泛使用的模拟集成电路,它可以实现乘、除、开方、乘方、调幅等功能,广泛应用于模拟运算、通信、测控系统、电气测量和医疗仪器等许多领域。
12.5.1 模拟乘法器电路的基本原理
模拟乘法器是一种能实现模拟量相乘的集成电路,设v O和v X、v Y分别为输出和两路输入
其中K为比例因子,具有的量纲。
模拟乘法器的电路符号如图12.5.1所示。
对于差动放大电路,电压放大倍数
如果用 v Y去控制I E,即I E∝v Y。
于是实现这一基本构思的电路如12.5.2图所示。
图12.5.1 模拟乘法器符号图12.5.2 模拟乘法器原理图
18.1.2 变跨导型模拟乘法器
根据图12.5.2的原理可以制成所谓变跨导模拟乘法器。
在推导高频微变等效电路时,将放大电路的增益写成为
只不过在式中的g m是固定的。
而图12.5.2中如果g m是可变的,受一个输入信号的控制,那该电路就是变跨导模拟乘法器。
由于v Y∝I E,而I E∝g m,所以v Y ∝g m。
输出电压为:
由于图12.5.2的电路,对非线性失真等因素没有考虑,相乘的效果不好。
实际的变跨导模拟乘法器的主要电路环节如图12.5.3所示。
图12.5.3 变跨导模拟乘法器。
高频实验报告--实验五 模拟乘法混频
5.改变高频信号电压幅度,用示波器观测,记录输出中频电压 V i 的幅度 VSP-P(mV) ViP-P(mV) 波形图如下: 300 376 400 664 500 825
改变本振信号电压幅度,用示波器观测,记录输出中频电压 V i 的幅值 VLP-P(mV) ViP-P(mV) 波形图如下: 200 464 300 472 400 488 500 504 600 520
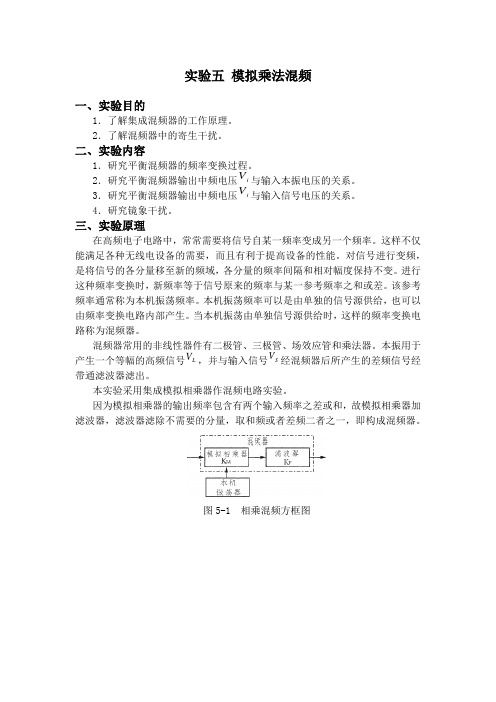
图 5-1
相乘混频方框图
图 5-2 混频前后的频谱图 图 5-1 所示为相乘混频器的方框图。设滤波器滤除和频,则输出差频信号。 图 5-2 为信号经混频前后的频谱图。我们设信号是:载波频率为 f S 的普通调幅 波。本机振荡频率为 f L 。 设输入信号为 vS VS cosS t ,本机振荡信号为 vL VL cosLt 由相乘混频的框图可得输出电压
3.将频率 f S 4.19MHz (幅度 VSp-p=300mV 左右)的高频信号(由 3 号板提 供)从相乘混频器的输入端 J7 输入,用示波器观察 J9 处中频信号波形的变化。 4.用示波器观察 TH8 和 TH9 处波形。 5.改变高频信号电压幅度,用示波器观测,记录输出中频电压 V i 的幅度, 并填入下表。 VSP-P(mV) ViP-P(mV) 改变本振信号电压幅度,用示波器观测,记录输出中频电压 V i 的幅值, 并填入下表。 VLP-P(mV) ViP-P(mV) 7.用频率计测量混频前后波形的频率。 8.镜象干涉频率的观测(需外接信号源代替③号板) 缓慢将高频信号发生器的输出频率从 4.2MHz 调至 13.2MHz, 用示波器的双路 观测载波-中频波形变化,并验证下列关系: f 镜象- f 载波=2 f 中频 9.混频的综合观察(需外接信号源代替③号板) 令外接信号源输出一个由 1K 音频信号调制的载波频率为 4.2MHz 的调幅波, 作为本实验的射频输入,本振信号不变,用示波器对比观察 J9 处的调制信号波 形。 200 300 400 500 600 200 300 400
模拟乘法器电路原理
模拟乘法器电路原理
乘法器电路是一种用于计算两个输入数的乘积的电子电路。
它由多个逻辑门和电子元件组成,能够将输入信号相乘得到输出信号。
在一个乘法器电路中,通常会有两个输入端和一个输出端。
输入端通常被标记为A和B,分别表示待乘数和乘数。
输出端通常被标记为P,表示乘积。
乘法器电路的工作原理是根据乘法的性质,将每一位的乘积相加得到最后的结果。
具体的实现方式可以有多种,下面介绍一种常见的实现方式。
乘法器电路通常被分为多个级别,每个级别负责计算某一位的乘积。
第一个级别接收A和B的最低位,通过逻辑门或触发器计算出对应的乘积,并将其存储为P的最低位。
然后,每个级别的输出和前一级别输出的进位信号经过逻辑门或触发器进行运算,得到当前级别的乘积和进位信号。
这个过程会一直进行,直到计算完所有位的乘积。
最后,所有级别的乘积和进位信号会被加和,得到最终的输出结果P,即A和B的乘积。
乘法器电路的实现可以使用多种逻辑门和元件,如AND门、OR门、XOR门、D触发器等。
具体的电路设计取决于要求的精度和速度。
需要注意的是,乘法器电路的设计和实现是一项复杂的任务,需要考虑多种因素,如延迟、功耗和精度等。
因此,在实际应用中,通常会使用专门的乘法器芯片,而不是自己设计和制造乘法器电路。
第五章 模拟相乘器与理想乘法关系
5.3 集成模拟乘法器
❖ 单片模拟集成电路基本分为两类: ❖ 一类是双极型电路,且可分为电压模和电流
模两种; ❖ 另一类是单极MOS型四象限乘法器电路
5.3.1 电压模四象限模拟相乘器
5.3.1 电压模四象限模拟相乘器
❖ 工作原理
❖ 由图5-3-1可以列出下面关系式,对于和:
❖
I EE
iC1 iC 2
❖ (2) 满功率响应 ❖ 乘法器在其额定负载上产生满度电压而不产生显
著畸变时所对应的最高功率称为满功率响应。 ❖ 3. 频率及小信号参数 ❖ (1) 工作频率 ❖ (2) 小信号带宽 ❖ (3)小信号幅度误差 ❖ (4)矢量误差
5.2 相乘器的基本性能参数
❖ 4. 瞬时参数 ❖ (1)调整时间 ❖ (2)上升速率 ❖ 5. 噪声 ❖ (1)噪声
❖
iC 3
1 2
iC1
1
th
vY 2VT
iC 4
1 2
iC
1
1
th
vY 2VT
iC 5
1 2
iC 2
1
th
vY 2VT
iC 6
1 2
iC
2
1
th
vY 2VT
❖
(5-3-3)
5.3.1 电压模四象限模拟相乘器
这样,已调波中
5.2 相乘器的基本性能参数
❖ 设相乘器的一个输入端 v X (t ) VR ,则理 想相乘器的输出、输入关系为线性关系,即:
vo (t) KvX (t)vY (t) KVRvY (t) (5-2-1)
大学_《高频电子电路》(王卫东版)课后答案下载

《高频电子电路》(王卫东版)课后答案下载《高频电子电路》(王卫东版)内容简介绪论0.1通信系统的组成0.2发射机和接收机的组成0.3本书的研究对象和任务第1章高频小信号谐振放大器1.1LC选频网络1.1.1选频网络的基本特性1.1.2LC选频回路1.1.3LC阻抗变换网络__1.1.4双耦合谐振回路及其选频特性1.2高频小信号调谐放大器1.2.1晶体管的高频小信号等效模型1.2.2高频小信号调谐放大器1.2.3多级单调谐放大器__1.2.4双调谐回路谐振放大器__1.2.5参差调谐放大器1.2.6谐振放大器的稳定性1.3集中选频放大器1.3.1集中选频滤波器1.3.2集成宽带放大器1.3.3集成选频放大器的应用1.4电噪声1.4.1电阻热噪声1.4.2晶体三极管噪声1.4.3场效应管噪声1.4.4噪声系数__小结习题1第2章高频功率放大器2.1概述2.2高频功率放大器的工作原理 2.2.1工作原理分析2.2.2功率和效率分析2.2.3D类和E类功率放大器简介 2.2.4丙类倍频器2.3高频功率放大器的动态分析----------DL2.FBD2.3.1高频功率放大器的动态特性 2.3.2高频功率放大器的负载特性2.3.3高频功率放大器的调制特性2.3.4高频功率放大器的放大特性2.3.5高频功率放大器的调谐特性2.3.6高频功放的高频效应2.4高频功率放大器的实用电路2.4.1直流馈电电路2.4.2滤波匹配网络2.4.3高频谐振功率放大器设计举例2.5集成高频功率放大电路简介2.6宽带高频功率放大器与功率合成电路2.6.1宽带高频功率放大器2.6.2功率合成电路__小结习题2第3章正弦波振荡器3.1概述3.2反馈型自激振荡器的工作原理 3.2.1产生振荡的基本原理3.2.2反馈振荡器的振荡条件3.2.3反馈振荡电路的判断3.3LC正弦波振荡电路3.3.1互感耦合LC振荡电路3.3.2三点式LC振荡电路3.4振荡器的频率稳定度3.4.1频率稳定度的定义3.4.2振荡器的稳频原理3.4.3振荡器的稳频措施3.5晶体振荡器3.5.1石英晶体谐振器概述3.5.2晶体振荡器电路3.6集成电路振荡器3.6.1差分对管振荡电路3.6.2单片集成振荡电路E16483.6.3运放振荡器3.6.4集成宽带高频正弦波振荡电路3.7压控振荡器3.7.1变容二极管3.7.2变容二极管压控振荡器3.7.3晶体压控振荡器__3.8RC振荡器3.8.1RC移相振荡器3.8.2文氏电桥振荡器__3.9负阻振荡器3.9.1负阻器件的基本特性----------DL3.FBD3.9.2负阻振荡电路 3.10振荡器中的几种现象3.10.1间歇振荡3.10.2频率拖曳现象3.10.3振荡器的频率占据现象3.10.4寄生振荡__小结习题3第4章频率变换电路基础4.1概述4.2非线性元器件的特性描述4.2.1非线性元器件的基本特性4.2.2非线性电路的工程分析方法4.3模拟相乘器及基本单元电路4.3.1模拟相乘器的基本概念4.3.2模拟相乘器的基本单元电路4.4单片集成模拟乘法器及其典型应用 4.4.1MC1496/MC1596及其应用4.4.2BG314(MC1495/MC1595)及其应用 4.4.3第二代、第三代集成模拟乘法器 __小结习题4第5章振幅调制、解调及混频5.1概述5.2振幅调制原理及特性5.2.1标准振幅调制信号分析5.2.2双边带调幅信号5.2.3单边带信号5.2.4AM残留边带调幅5.3振幅调制电路5.3.1低电平调幅电路5.3.2高电平调幅电路5.4调幅信号的解调5.4.1调幅波解调的方法5.4.2二极管大信号包络检波器5.4.3同步检波----------DL4.FBD5.5混频器原理及电路 5.5.1混频器原理5.5.2混频器主要性能指标5.5.3实用混频电路5.5.4混频器的干扰5.6AM发射机与接收机5.6.1AM发射机5.6.2AM接收机5.6.3TA7641BP单片AM收音机集成电路 __小结习题5第6章角度调制与解调6.1概述6.2调角信号的分析6.2.1瞬时频率和瞬时相位6.2.2调角信号的分析与特点6.2.3调角信号的频谱与带宽6.3调频电路6.3.1实现调频、调相的方法6.3.2压控振荡器直接调频电路6.3.3变容二极管直接调频电路6.3.4晶体振荡器直接调频电路6.3.5间接调频电路6.4调频波的解调原理及电路6.4.1鉴频方法及其实现模型6.4.2振幅鉴频器6.4.3相位鉴频器6.4.4比例鉴频器6.4.5移相乘积鉴频器6.4.6脉冲计数式鉴频器6.5调频制的`抗干扰性及特殊电路6.5.1调频制中的干扰及噪声6.5.2调频信号解调的门限效应6.5.3预加重电路与去加重电路6.5.4静噪声电路6.6FM发射机与接收机6.6.1调频发射机的组成6.6.2集成调频发射机6.6.3调频接收机的组成6.6.4集成调频接收机__小结习题6----------DL5.FBD第7章反馈控制电路 7.1概述7.2反馈控制电路的基本原理与分析方法 7.2.1基本工作原理7.2.2数学模型7.2.3基本特性分析7.3自动增益控制电路7.3.1AGC电路的工作原理7.3.2可控增益放大器7.3.3实用AGC电路7.4自动频率控制电路7.4.1AFC电路的组成和基本特性7.4.2AFC电路的应用举例7.5锁相环路7.5.1锁相环路的基本工作原理7.5.2锁相环路的基本应用7.6单片集成锁相环电路简介与应用 7.6.1NE5627.6.2NE562的应用实例__小结习题7第8章数字调制与解调8.1概述8.2二进制振幅键控8.2.12ASK调制原理8.2.22ASK信号的解调原理8.3二进制频率键控8.3.12FSK调制原理8.3.22FSK解调原理8.4二进制相移键控8.4.12PSK调制原理8.4.22PSK解调原理8.5二进制差分相移键控8.5.12DPSK调制原理8.5.22DPSK解调原理__小结习题8第9章软件无线电基础9.1概述9.2软件无线电的关键技术 9.3软件无线电的体系结构 9.4软件无线电的应用__小结习题9附录A余弦脉冲分解系数表部分习题答案参考文献《高频电子电路》(王卫东版)图书目录本书为普通高等教育“十二五”、“十一五”国家级规划教材。
高二物理竞赛课件模拟乘法器及其在运算电路中的应用
负载变化,通
带放大倍数和截 止频率均变化。
Au
Aup 1 j f
fp
有源滤波电路
用电压跟随
器隔离滤波电 路与负载电阻
无源滤波电路的滤波参数随负载变化;有源滤波电路的 滤波参数不随负载变化,可放大。
无源滤波电路可用于高电压大电流,如直流电源中的滤 波电路;有源滤波电路是信号处理电路,其输出电压和电 流的大小受有源元件自身参数和供电电源的限制。
理想滤波器的幅频特性
高通滤波器(HPF)
阻容耦合
带通滤波器(BPF)
通信电路
带阻滤波器(BEF))
抗已知频率的干扰
全通滤波器(APF))
f-φ转换
3. 无源滤波电路和有源滤波电路
空载时 带负载时
空载:Aup 1
fp
1 2πRC
Au
1 1 j
f
fp
带载:Aup
R
RL RL
fp
2π
1 (R ∥ RL )C
时候截止?
uO uI
在集成运放应用电路中开关管的工作状态往往决定于输入 信号或输出信号的极性!
一、概述
1. 滤波电路的功能
使指定频段的信号顺利通过,其它频率的信号被衰减。
2. 滤波电路的种类
低通滤波器(LPF)
通带放大倍数
理想幅频特性 无过渡带
通带截止频率
下降速率
用幅频特性描述滤波特性,要研究 Aup 、Au ( fP、下降速率)。
模拟乘法器及其在 运算电路中的应用
模拟乘法器及其在 运算电路中的应用
一、模拟乘法器简介 二、模拟乘法器在运算电路中的应用
一、模拟乘法器简介
1. 变跨导型模拟乘法器的基本原理
第05章 模拟相乘器与理想乘法关系
图 5 3 9 流 控 电 流 电 路 -
(2) 0.5~1GHz跨导线性集成四象限相 GHz跨导线性集成四象限相 乘器原理 乘器原理 (3) 0.5~1GHz单片集成四象限相乘器 GHz单片集成四象限相乘器 的特性与应用 的特性与应用
0.5~ 1GHz超高频单片集成四象限相 0.5 ~ 1GHz 超高频单片集成四象限相 乘器如AD834, 基本应用外部连接图如图 乘器如 , 5-3-13所示。 所示。 所示
图5-3-1电压模模拟相乘器
1.工作原理 工作原理
图5-3-1所示电路由三个基本差动放大 所示电路由三个基本差动放大 器组成。如设晶体管VT 成对匹配, 器组成。如设晶体管 1~VT6成对匹配, 且 ,α≈1,由图 ,由图5-3-1可以列出下面 可以列出下面 关系式,对于VT 关系式,对于 1和VT2:
(2) 上升速率SR 上升速率S 上升速率S 是相乘器大信号动态特性。 上升速率 R是相乘器大信号动态特性。 它是指相乘器输出电压的最大变 化速率。 化速率。
5.噪声 噪声
噪声规定在两输入端均短路(无输入信 噪声规定在两输入端均短路 无输入信 时测得的输出噪声。 号)时测得的输出噪声。 时测得的输出噪声
(3) 差模输出电流—单端输出电压变换器 差模输出电流—
2. 0.5~lGHz跨导线性四象限相乘器
(1) 0.5~1GHz的电流模放大器工作原理 GHz的电流模放大器工作原理
图5-3-9是电流模放大器的基本单元之 是电流模放大器的基本单元之 流控电流电路), 一 (流控电流电路 , 晶体管 1,VT2 接成 流控电流电路 晶体管VT 差分形式, 它们的发射结由电流源I 驱动, 差分形式 , 它们的发射结由电流源 E 驱动 , 互补电流源xI和 分别驱动晶体管VT 互补电流源 和 (1-x)I分别驱动晶体管 3 分别驱动晶体管 并在VT 和 VT4, 并在 3 和 VT4 基射结上产生一个 压降。 压降。
5.3差分对电路
• 性能分析 a .由电路可知,其双端输出的差动电流为:
i0 = i - i = (i1 + i 3)- (i2 + i 4)
= (i1 - i 2)- (i4 - i 3)
= (i1 - i 2)- (i4 - i 3)
= i5 tanh ( uA/2VT ) - i6 tanh ( uA/2VT ) = (i5 - i6) tanh ( uA/2VT ) = I0 tanh ( uB/2VT ) tanh ( uA/2VT )
实际电路常采用负反馈技术以扩展 uB通道的动态范围:
方法:在T5 和 T6 发射极上接入负反馈电阻 RE2, 当 RE2 足够大,满足深度负反馈条件时
uB 1/2(i5 - i 6)RE2 [见书162页]
即 i5 - i 6 2uB/ RE2 此时 i0 2uB/ RE2 tanh ( uA/2VT )
恒流源
• 扩展 uA 通道的动态范围:
方法: 利用预畸变电路的反双曲正切函数 特性来补偿 双差分对管的双曲正切函数特。
uA’
u A ' arcth(u A )
uA
模拟乘法器 BG314(MC1595)
在 BG314 内部,虚线右侧为预畸变电路,用以扩展 uA 的动态范围,在10 . 11之间,接入反馈电阻,用以 扩展 uB 的动态范围。
i0 = I0 tanh ( uB/2VT ) tanh ( uA/2VT )
结论: i0 与 uA .uB均为非线性关系,用作频谱搬移电 路时,输入信号和控制信号可任意加在两个非线性通道。
i0 = I0 tanh ( uB/2VT ) tanh ( uA/2VT )
重要结论:
(1) 当 | uA | 、 | uB | < 26 mv 时
模拟相乘器及基本单元电路
4.3.1 模拟相乘器的基本概念
3.基本性质 (1)ux 0,uy 为任意值;或 uy 0 ,ux 为任意值,uz 0
(2)ux C ,则 uz KCuy Cuy
【结论】uz 与uy 成线性关系。
(3)ux uy ,则 uz Kux2
抛物线
【结论】uz 与 ux 是平方律关系,即非线性关系。
X
YZ
工作象限
uy
+
++
I
-
+
-
II
-
-
+
III
II
I
0
ux
III IV
+
-
-
IV
如果:两个输入信号只能为单极性(同为正或同为负)的信号 的乘法器为“单象限乘法器”;一个输入信号适应两种极性,而一 个只能是一种单极性的乘法器为“二象限乘法器”;两个输入信号 都能适应正、负两种极性的乘法器为“四象限乘法器”。
ux 2UT
Ioux 2UT
+ ux
当 ux
2UT
52mV时有
th
因此差分放大器的跨导为
ux 2UT
ux 2UT
+
EC
RC
RC
ic1 - uo + ic2
+ube1-VT1 VT2 -ube+2
Io VT3
时变
gm
iod ux
Io 2UT
而恒流源的电流为
时变
Io
uy
ube3 RE
因此输出电压为
Ry
EC
i3
iB
RC
u+-o i4
VT3 VT4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
与D2上的电压差, 其中标度因子: 即: ux U D1 U D2
ux
VT7
uy
Ry
iy Ioy Ioy
仿真
休息1 休息2
5.4 单片集成模拟乘法器及其典型应用
一、MC1496/MC1596及其应用 若选择Ioy=1mA,Uym=1V(峰值) 1、 内部电路结构 U ym I oy 与具有射极负反馈的双平 R 衡Gilbert y相乘器单元电路比 U ym 1 较,电路基本相同,仅恒流源 Ry 1k 3 ux 用晶体管VT7,VT8代替,二极 I oy 1 10 管VD与500 电阻构成VT7, uy VT8的偏置电路。 反偏电阻Ry外接在引脚②、 ③两端,可展宽uy输入信号的 R 动态范围,并可调整标度因子 -EE K。 2、外接元件参数的计算 ①负反馈电阻Ry
5.3 模拟相乘器及基本单元电路
模 拟 运 算 模拟乘法器可应用于: 通 信 工 程等各种技术领域 自 动控制 测 量 设 备
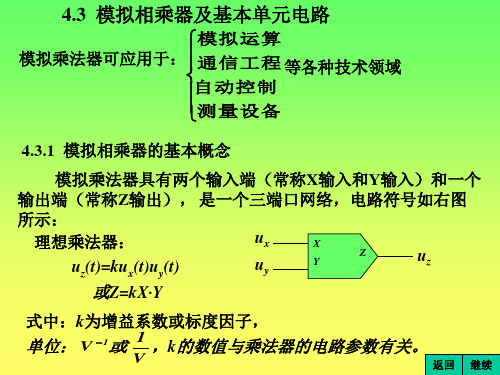
5.3.1 模拟相乘器的基本概念
模拟乘法器具有两个输入端(常称X输入和Y输入)和一个 输出端(常称Z输出), 是一个三端口网络,电路符号如右图 所示: ux X 理想乘法器: Z uz Y uy uz(t)=kux(t)uy(t)
Rc Ec Rc
VT1
VT2
VT3 VT4
VT VT5 5
VT VT6 6
Io
返回
继续
二、 吉尔伯特(Gilbert)乘法器 I R uo o 2c u x u y Ku x u y ②工作原理分析 4VT 根据差分电路的工作原理: 而标度因子 K I o R2c
ux i1 i 2 i 5 th Gilbert乘法器单元电路,只 2U T 有当输入信号较小时,具有较理 u i 4 i 3 i 6 th ux 均可取正、 想的相乘作用,ux, y 2U T 负两极性,故为四象限乘法器电 uy i 5 i 6 I o th 路,但因其线性范围小,不能满 2U T
或Z=kX· Y
式中:k为增益系数或标度因子, 1 单位: V 1或 ,k的数值与乘法器的电路参数有关。
V
返回 继续
一、乘法器的工作象限 乘法器有四个工作区域,可由它的两个输入电压的极性确定。 Y 输入电压可能有四种极性组合: X Y Z Ymax (+) ·(+) = (+) 第Ⅰ象限 -Xmax Xmax X (-) · (+) = (-) 第Ⅱ象限 (-) · (-) = (+) 第Ⅲ象限 -Ymax (+) ·(-) = (-) 第Ⅳ象限
返回 继续
(2)当X=C(常数),Z=KCY=K‘Y, Z与Y成正比(线性关系) (3)当X=Y或X=-Y,Z=KX2或Z=-KX2, 输出与输入是平方律特性(非线性)。 2、乘法器的线性和非线性 理想乘法器属于非线性器件还是线性 器件取决于两个输入电压的性质。
X=-Y
C<0
Y
C>0 X
Y
X=Y
X
o
x
/ UT
)
x
T
x
T
3
ux 乘项,而且要求uy≥ube3,所以只能实现 th 式中, ( 2U ) 为双曲正切函数。 T 二象限相乘。
ux UT
返回
继续
二、 吉尔伯特(Gilbert)乘法器 1、Gilbert乘法单元电路 是一种四象限乘法器,也是大多数集成乘法器的基础电路。 ①基本电路结构 VT1,VT2,VT3,VT4 为双平衡的差分对,VT5, VT6差分对分别作为VT1, VT2和VT3,VT4双差分对 的射极恒流源。
iD2
+ UD2
-
VT1
VT2
VT4 VT3
iD1 i7 i8 Rx ix
ux'
VT8
VT6 VT5
2R Iox i i U DK T n D1 c U T n 7 U 1 I ox R x R y Is Is i8 iD2 U 可见大大扩展了电路对u 和u 的线性动态范围,改变电 UT n UT n x y ux ux D2 Is Is I ox 1 阻Rx或Ioxi可很方便地改变相乘器的增益。 i8 Rx I ox Rx i7 U T ( n 7 n ) U T n U T n ux UT n ( ) ux ux Is Is i8 I ox 1 Rx I ox Rx
一般: ①当X或Y为一恒定直流电压时,Z=KCY=K`Y, 乘法器为一个线性交流放大器。 ②当X和Y均不定时,乘法器属于非线性器件。
返回 继续
5.3.2模拟相乘器的基本单元电路 ux ) 差分输出电流io为: iod ic1 ic2 I o th( 1、二象限变跨导模拟相乘器 2U T u u th( x ) x 可以看出,当ux <<2UT 时, 2U 2U ①基本电路结构 T T ux 是一个恒流源差分放大电路,不同之处 ic1、ic2与 U 近似成线性关系。 T 在于恒流源管VT3的基极输入了信号uy(t), u i od I o x 可近似为: 即恒流源电流Io受uy2U T (t)控制。 i I gm id o 差分放大电路的跨导gm为: 由图可知: u = u - u u 2U
仿真
当输入为小信号并满足:
u u th x x 2U 2U T U x 2U T 52mV T U y 2U T 52mV th u y u y 2U T 2U T
休息1 休息2
uy ux I o Rc th th 2VT 2VT
iy uy Ry
Ec
Rc
Rc
VT1
VT2
VT3
VT4
VT5
VT6 Ry
y
VD
VT VT77
VT VT88
Ioy
Ioy
+
VT5 Ry
VT6
且应满足|iy|<Ioy
返回 继续
uy
-
iy
②偏置电阻R10 由右图电路可得:
E E I oy ( R5 500) U D
Ec Rc
当
R5
如果:两个输入信号只能为单极性的信号的乘法器为“单
象 限乘法器”;一个输入信号适应两种极性,而一个只能是一种 单 二、理想乘法器的基本性质 极性的乘法器为“二象限乘法器”; 两个输入信号都能适应正、 1、乘法器的静态特性 负两种极性的乘法器为“四象限乘法器”。 (1) 当X 0 ,Y为任意值时, Z 0 X为任意值,Y 0时 , Z 0
2、具有射极负反馈电阻的Gilbert乘法器 使用射极负反馈电路Ry , 如果ux<2UT =52mV时, 可扩展uy的线性范围,Ry取 Rc Rc 值应远大于晶体管T5 ,T6 的 iA uo ux u y UT Ry 发射极电阻,即有 +
R y re 5 26mV 26mV ; R y re 6 I oy I oy
负反馈电阻RY, Rx,负载电阻Rc,恒 流偏置电阻R3及RW5 ,R13及R1均采用外接 元件。
返回 继续 休息1 休息2
vx +
+ vy
R1 Rc
1 2
Rc
VCC
vo
14 5 6 10 3 13 7
+ vx
-
4 8 9 12
MC1595 (BG314)
Rx Ry
v+ y -
11
R3
R13
Rw5
Ec R1 Rc Rc
uo
VT1
VD1 VD2
VT2
VT4 VT3
ux'
VT7 VT8 VT6 VT5
ux
Rx Iox Iox
uy
Ioy
Ry
Ioy
返回 继续
1 工作原理分析: 1 x arcthx 利用数学关系: n 1 x , 2 I VT7 , VT8 , Rx , 则上式可写成: ox 构成线性电压—电 u u 2U T arcth x (1) x 流变换器。 I R ox x ux 2R ∴有 i 7 cI ox ux +
Ry
R5 oy
I
VD
VT7
VT8
Ec U R 12 8 4 K , 则有: Rc 3 I oy 1 10
标称值为3.9 K 。
返回 继续
三、 MC1495/MC1595(BG314)及其应用
1、内部电路结构 ①内部电路如图 所示,由线性化双平 衡Gilbert乘法器单元 电路组成。 输入差分对由T5 , T6,T7,T8和T11,T12, T13 , T14 的 达 林 顿 复 合管构成,以提高放 大管增益及输入阻抗。
ux
-
休息1 休息2
Ec
iB
Rc
+ uo
-
VT1 VT2
VT3
VT4
静态时,i5=i6=IoY ,当加入 信号uy时,流过Ry的电流为:
iY uy RY re 5 re 6 uy RY
+ uy
-
VT5
i5 R Ryy iY
i6
VT6
仿真
Ioy Ioy
i 5 I oy iY ∴有 VT5 + i 6 I oy iY uy 2u y i5 i6 2iY RY u 2 Rc u uo ( i A i B ) Rc ( i5 i6 ) Rc th x u y th x 2U T Ry 2U T
VEE