数字图像管理组织第三版中文答案解析冈萨雷斯
《数字图像处理》冈萨雷斯-Matlab函数汇总(完整版)

[资料] 《数字图像处理》冈萨雷斯,函数汇总Matlab转载▼(2012-05-07 14:24:20)标签:杂谈图像显示显示彩条colorbar由坐标轴得到图像数据getimageice(DIPUM)交互彩色编辑创建和显示图像对象image缩放数据并显示为图像imagesc由多帧图像制作电影immovie显示图像imshowimview在Image Viewer 中显示图像将多个图像帧显示为矩阵蒙太奇montage播放录制的电影帧movie显示一个彩色RGB立方rgbcube体在单个图形中显示多幅图像subimage调整图像的显示尺寸truesize将图像显示为纹理映射的表面warp图像文件输入/ 输出从一条DICOM消息中读取元数Dicominfo据读一幅DICOM图Dicomread像写一幅DICOM图Dicomwrite像包含DICOM数据字典的文本文Dicom-dict.txt件产生DICOM唯一的识别Dicomuid器返回关于图像的文件的信息Imfinfo读图像文件Imread写图像文件Imwrite图像算术计算两幅图像的绝对差Imabsdiff两幅图像相加或把常数加到图像上Imadd图像求补Imcomplement两幅图像相除,或用常数除图像Imdivide计算图像的线性组合Imlincomb两幅图像相乘或用常数乘图像Immultiply两幅图像相减,或从图像中减去常数Imsubtract几何变换创建棋盘格图像Checkerboard求几何变换的输出范围FindboundsFliptform颠倒TFOR M结构的输入/ 输出修剪图像Imcrop调整图像大小Imresize旋转图像Imrotate对图像应用几何变换Imtransform整数坐标线绘制算法Intline创建重取样器结构Makersampler创建几何变换结构(TFOR M)MaketformPixeldup(DIPUM)在两个方向上复制图像的像素Tformarray对N-D 数组应用几何变换应用正向几何变换Tformfwd应用反向几何变换TforminvVstformfwd (DIPUM)可视化正向几何变换图像匹配将CPSTRUC转T换为有效的控制点Cpstruct2pairs对由控制点对推断几何变换Cp2tform使用互相关校准控制点位置Cpcorr控制点选择工具Cpselect归一化二维互相关Normxcorr2像素值及统计计算二维相关系数Corr2Covmatrix (DIPUM)计算向量族的协方差矩阵创建图像数据的轮廓线Imcontour显示图像数据的直方图Imhist确定像素的彩色点Impixel计算沿着线段的像素值横截面Improfile计算矩阵元素的均值Mean2显示关于像素的信息Pixval测量图像区域的属性RegionpropsStatmoments (DIPUM)计算一幅图像直方图的统计中心距计算矩阵元素的标准偏差Std2图像分析(包括分割、描述和识别)Bayesgauss(DIPUM)高斯模式的贝叶斯分类器Bound2eight(DIPUM)将4连接边界转换为8连接边界Bound2four(DIPUM)将8连接边界转换为4连接边界追踪区域边界Bwboundaries追踪单个边界BwtraceboundaryBound2im(DIPUM)将边界转换为图像Boundaries(DIPUM)追踪区域边界Bsubsamp(DIPUM)对边界二次取样Colorgrad (DIPUM)计算一幅RGB图像的向量梯度Colorseq(DIPUM)分割一幅彩色图像Connectpoly(DIPUM)连接多边形的顶点Diameter(DIPUM)测量图像区域的直径Edge(DIPUM)在一幅亮度图像中寻找边缘Fchcode(DIPUM)计算边界的freeman 链码Frdescp (DIPUM)计算傅里叶描绘子使用Ostu 方法计算图像的全局阈值GraythreshHough(DIPUM)变换HoughHoughlines(DIPUM)基于Hough变换提取线段Houghpeaks(DIPUM)在Hough变换中检测峰值Houghpixels(DIPUM)计算属于Hough 变换bin 的图像像素Ifrdescp (DIPUM)计算逆傅里叶描绘子Imstack2vectors (DIPUM)从图像堆栈提取向量Invmoments (DIPUM)计算图像不变距Mahalanobis(DIPUM)计算Mahalanobis 距离Minperpoly(DIPUM)计算最小周长多边形Polyangles(DIPUM)计算多边形内角Princomp(DIPUM)得到主分量向量和相关量执行四叉树分解Qtdecomp得到四叉树分解中的块值Qtgetblk在四叉树中设置块值QtsetblkRandvertex(DIPUM)随机置换多边形顶点Regiongrow(DIPUM)由区域生长来执行分割Signature (DIPUM)计算边界的标记Specxture (DIPUM)计算图像的谱纹理Splitmerge(DIPUM)使用分离- 合并算法分割图像Statxture (DIPUM)计算图像中纹理的统计度量Strsimilarity(DIPUM)两个串间的相似性度量X2majoraxis(DIPUM)以区域的主轴排列坐标x图像压缩Compare(DIPUM)计算和显示两个矩阵间的误差Entropy (DIPUM)计算矩阵的熵的一阶估计Huff2mat (DIPUM)解码霍夫曼编码矩阵Huffman (DIPUM)为符号源建立一个变长霍夫曼码Im2jpeg(DIPUM)使用JPEG近似压缩一幅图像Im2jpeg2k (DIPUM)使用JPEG2000近似压缩一幅图像Imratio (DIPUM)计算两幅图像或变量中的比特率Jpeg2im(DIPUM)解码IM2JPEG压缩的图像Jpeg2k2im (D IPUM)解码IM2JPEG2K压缩的图像Lpc2mat(DIPUM)解压缩一维有损预测编码矩阵Mat2huff (DIPUM)霍夫曼编码矩阵Mat2lpc(DIPUM)使用一维有损预测编码矩阵Quantize(DIPUM)量化UINT8类矩阵的元素图像增强自适应直方图量化Adapthisteq对多通道图像应用去相关拉伸DecorrstretchGscale(DIPUM)按比例调整输入图像的亮度使用直方图均衡化来增强对比度HisteqIntrans (DIPUM)执行亮度变换调整图像亮度值或彩色映射Imadjust寻找对比度拉伸图像的限制Stretchlim图像噪声给一幅图像添加噪声ImnoiseImnoise2(DIPUM)使用指定的PDF生成一个随机数数组Imnoise3(DIPUM)生成周期噪声线性和非线性空间滤波Adpmedian(DIPUM)执行自适应中值滤波计算二维卷积矩阵Convmtx2Dftcorr (DIPUM)执行频率域相关Dftfilt (DIPUM)执行频率域滤波创建预定义滤波器Fspecial执行二维中值滤波Medfilt2滤波二维和N维图Imfilter像执行二维顺序统计滤波Ordfilter2Spfilt (DIPUM)执行线性和非线性空间滤波执行二维去噪滤波Wiener2线性二维滤波器设计确定二维频率响应间隔Freqspace计算二维频率响应Freqz2Fsamp2使用频率取样设计二维FIR 滤波器使用频率变换设计二维FIR 滤波器Ftrans2使用一维窗法设计二维滤波器Fwind1使用二维窗法设计二维滤波器Fwind2Hpfilter(DIPUM)计算频率域高通滤波器Lpfilter(DIPUM)计算频率域低通滤波器图像去模糊(复原)使用盲去卷积去模糊图像DeconvblindDeconvlucy使用Lucy-Richardson 方法去模糊使用规则化滤波器去模糊Deconvreg使用维纳滤波器去模糊Deconvwnr使用点扩散函数锐化边缘Edgetaper光传递函数到点扩散函数Otf2psf点扩散函数到光传递函数Pst2otf图像变换二维离散余弦变换Dct2离散余弦变换矩阵Dctmtx将扇形束投影变换为并行射束Fan2para计算扇形射束变换Fanbeam二维快速傅里叶变换Fft2维快速傅里叶变换Fftn NFftshift颠倒FFT 输出的象限二维逆离散余弦变换Idct2计算扇形射束逆变换Ifanbeam二维快速傅里叶逆变换Ifft2维快速傅里叶逆变换Ifftn N计算逆Radon变Iradon换将并行射束投影变换为扇形射束Para2fan生成头部仿真模型的图像Phantom计算Radon变Radon换小波Wave2gray(DIPUM)显示小波分解系数Wavebac k(DIPUM)执行多灰度级二维快速小波逆变换Wavecop y(DIPUM)存取小波分解结构的系数Wavecut(DIPUM)在小波分解结构中置零系数Wavefast (DIPUM)执行多灰度级二维快速小波变换Wavefilter (DIPUM)构造小波分解和重构滤波器Wavepaste(DIPUM)在小波分解结构中放置系数Wavewor k(DIPUM)编辑小波分解结构Wavezero(DIPUM)将小波细节系数设置为零领域和块处理为块处理选择块大小Bestblk为图像实现不同的块处理Blkproc将矩阵列重排为块Col2im按列邻域操作Colfilt将图像块重排为列Im2col执行一般的滑动邻域操作Nlfilter形态学操作(亮度和二值图像)默认连通性Conndef执行底帽滤波Imbothat抑制与图像边框相连的亮结构Imclearborder关闭图像Imclose膨胀图像Imdilate腐蚀图像Imerode最大扩展变换Imextendedmax最小扩展变换Imextendedmin填充图像区域和孔洞Imfill最大变换Imhmax H最小变换Imhmin H强制最小Imimposemin打开图像Imopen形态学重构Imreconstruct局部最大区域Imregionalmax局部最小区域Imregionalmin执行顶帽滤波Imtophat分水岭变换Watershed形态学操作(二值图像)使用查表法执行邻域操作Applylut计算二值图像中的对象面积Bwarea打开二值区域(删除小对象)Bwareaopen计算二值图像的距离变换Bwdist计算二值图像的欧拉数Bweuler二值击不中操作Bwhitmiss在二维图像中标记连接分量BwlabelBwlabeln在N 维二值图像中标记连接分量对二值图像执行形态学操作Bwmorph打包二值图像Bwpack确定二值图像中的对象的周长Bwperim选择二值图像中的对象Bwselect最终腐蚀Bwulterode解包二值图像BwunpackEndpoints (DIPUM)计算二值图像的端点Makelut构建applylut 使用的查找表结构元素(STREL)的创建和操作得到的高度Getheight strel得到邻域的偏移位置和高度Getneighbors strelGetnhood得到strel 邻域得到分解的strel 序列Getsequence对平坦的strel 返回值Isflat以其中心反射Reflect strel创建形态学结构元素StrelTranslate变换strel基于区域的处理Histroi(DIPUM)计算图像中的ROI 的直方图Poly2mask将ROI 多边形转换为掩膜基于颜色选择Roicolor ROI在任意区域内平稳地内插RoifillRoifilt2对ROI 进行滤波选择多边形Roipoly ROI彩色映射处理加亮或加暗彩色映射Brighten在彩色映射中重排颜色Cmpermute寻找唯一的彩色映射颜色和相应的图像Cmunique设置或得到彩色查找表Colormap以很少的颜色近似被索引的图像Imapprox绘制RGB彩色映射分Rgbplot量彩色空间转换应用独立于设备的彩色空间变换Applyform将HSV值转换为RGB彩色空Hsv2rgb间Iccread读ICC 彩色配置文件将L*a*b* 彩色值转换为double 类Lab2double将L*a*b* 彩色值转换为uint16 类Lab2uint16将L*a*b* 彩色值转换为uint8 类Lab2uint8创建独立于设备的彩色空间变换结构Makecform将NTSC值转换为RGB彩色空Ntsc2rgb间将RGB值转换为HSV彩色空Rgb2hsv间将RGB值转换为NTSC彩色空Rgb2ntsc间将RGB值转换为YCBCR彩色空间Rgb2ycbcr将YCBCR值转换为RGB彩色空间Ycbcr2rgbRgb2hsi(DIPUM)将RGB值转换为HSI 彩色空间Hsi2rgb(DIPUM)将HSI 值转换为RGB彩色空间返回标准照明的XYZ值Whitepoint将XYZ彩色值转换为类Xyz2double double将XYZ彩色值转换为类Xyz2uint16 uint16数组操作循环地移位数组CircshiftDftuv (DIPUM)计算网格数组填充数组PadarrayPaddedsize(DIPUM)计算用于FFT 的最小填充尺寸图像类型和类型转换改变一幅图像的类Changeclass使用抖动转换图像Dither将亮度图像转换为索引图像Gray2ind通过阈值处理从亮度图像创建索引图像Grayslice通过阈值处理将图像转换为二值图像Im2bw将图像数组转换为双精度Im2double将图像转换为Java 图像Im2java将图像转换为Java 缓存的图像对象Im2java2d将图像数组转换为8比特无符号整数Im2uint8将图像数组转换为16比特无符号整Im2uint16数将索引图像转换为亮度图像Ind2gray将索引图像转换为RGB图Ind2rgb像将标记矩阵转换为RGB图Label2rgb像将矩阵转换为亮度图像Mat2gray将RGB图像或彩色映射转换为灰度图Rgb2gray像将RGB图像转换为索引图Rgb2ind像其他函数Conwaylaws(DIPUM)对单个像素应用Conway的遗传定律Manualhist(DIPUM)交互地生成2模式直方图Twomodegaus s(DIPUM)生成一个2模式高斯函数基于查找表计算新数组值Uintlut工具箱参数获得图像处理工具箱参数的值Iptgetpref设置图像处理工具箱参数的值Iptsetpref。
数字图像处理(冈萨雷斯)
均匀噪声
高斯噪声
瑞利噪声
噪声
指数噪声
椒盐噪声
第14页,共62页。
①高斯噪声
高斯噪声的概率密度函数(PDF)
p(z) 1 e(z )2 /2 2 (5.2 1)
2
灰度值
✓ 当z服从上式分布时,其值有70%落在 , , 有 95%落在
范围内。 2 , 2
✓ 高斯噪声的产生源于电子电路噪声和由低照明度或高温带来的 传感器噪声。
其中zi值是像素的灰度值, p(zi )表示相应的归一化直方图.
第30页,共62页。
5.3 空间域滤波复原(唯一退化是噪声)
当唯一退化是噪声时,则退化系统H(u,v) 1
g( x, y) f ( x, y) ( x, y) (5.3 1)
G(u, v) F (u, v) N (u, v) (5.3 2)
的开关操作)
第22页,共62页。
例5.1 样本噪声图像和它们的直方图
✓ 用于说明噪声模型的测试图
✓ 由简单、恒定的区域组成 ✓ 仅仅有3个灰度级的变化
第23页,共62页。
例5.1 样本噪声图像和它们的直方图
高斯噪声
瑞利噪声
伽马噪声
图像
直方图
第24页,共62页。
例5.1 样本噪声图像和它们的直方图
➢在图像获取中从电 力或机电干扰中产生.
➢是空间相关噪声.
➢周期噪声可以通过 频率域滤波显著减少.
周期噪声
被不同频率的 正弦噪声干扰 了的图像
呈圆形分布 的亮点为噪 声频谱
第27页,共62页。
典型的周期噪声---正弦噪声
• Sinusoidal (单 一频率)
数字图像处理第三版习题解答(冈萨雷斯版)
4 为什么一般情况下对离散图像的直方图均衡化并不能产生完全平坦的直方 图?【因为同一个灰度值的各个象素没有理由变换到不同灰度级,所以数字图像 的直方图均衡化的结果一般不能得到完全均匀分布的直方图, 只是近似均匀的直 方图。 】 5 设已用直方图均衡化技术对一幅数字图像进行了增强, 如再用这一方法对所得 结果增强会不会改变其结果?【从原理上分析,直方图均衡化所用的变换函数为 原始直方图的累积直方图, 均衡化后得到的增强图像的累积直方图除有些项合并 外,其余项与原始图像的累积直方图相同。如果再次均衡化,所用的变换函数即 为均衡化后得到的增强图像的累积直方图(并且不会有新的合并项) ,所以不会
解:(a)T=M/56000=(1024×1024)×(8+2)/56000=187.25s=3.1min (b) T=M/56000=(1024×1024)×(8+2)/750000=14s
2.两个图像子集S1和S2图下图所示。对于V={1},确定这两个子集是(a) 4-邻接,(b)8-邻接,(c)m-邻接。 a) S1 和S2 不是4 连接,因为q 不在N4(p)集中。 (b) S1 和S2 是8 连接,因为q 在N8(p)集中。
【链码: 110003301232 微分码 303003011113 形状数 003011113303 阶 12】 19 为什么伪彩色处理可以达到增强的效果呢? 由于人眼对彩色的分辨能力远远大于对黑白灰度的分辨率。 对于一般的观察者来说。 通常 能分辨十几级灰度,就是经专业训练的人员也只能分辨几十级灰度。而对于彩色来说,人的 眼睛可分辨出上千种彩色的色调和强度。因此,在一幅黑白图像中检测不到的信息,经伪彩 色增强后可较容易的被检测出来。
数字图像处理第二章课件 冈萨雷斯第三版
饱和度指 的是一个 最大值。 超过这个 值的灰度 级将被剪 切掉。
N和k取不同值时存储所需的比特数
空间和灰度分辨率
(1)空间分辨率:图像空间中可分辨的最小细节。一般 用单位长度上采样的像素数目或单位长度上的线对数目表 示。例如,举一个质量概念,报纸用75dpi的分辨率来印刷, 杂志是133dpi,光鲜的小册子是175dpi,您正在看的书是 以2044dpi印刷的。空间分辨率的度量必须针对空间单位来 规定才有意义。 (2)灰度分辨率:图像灰度级中可分辨的最小变化。一 般用灰度级或比特数表示。灰度级数通常是2的整数次幂。 最通用的是8比特。通常说一副被量化为256级的图像有8比 特的灰度分辨率。
的动 地 量 胶 一一 从 , 片 行次 左 且 每 。, 到 传 旋 输右感转 出线器一 图性完个 像移整增
2.3.2 使用条带传感器获取图像
1.使用一个线性传 感器带获取图像 2.使用一个环形传 感器带获取图像
• 比单个传感器更常用的几何结构是由内嵌传感器 形式组成的传感器带。感知设备内嵌有4000个或 更多的传感器。内嵌传感器常用于航空成像应用 中,飞行器以恒定的高度和速度飞过被成像的地 区。成像传感器带一次给出一幅图像的一行,传 感器带的运动完成二维图像的另一个维度。 • 以圆环形方式安装的传感器带用于医学和工业成 像,以得到三维物体的剖面(切片)图像,传感器 的输出必须由重建算法处理,目的是把感知数据 转换为有意义的剖面图像。
2.3.4 简单的图像形成模型(数学模型)
f ( x, y ) i ( x , y ) r ( x , y ) 其中: f ( x, y )是图像幅度分布 i ( x, y )是入射场分布,取决于照射源特性 r ( x, y )是反射系数分布, 取决于成像物体的特性
2023年大学_《数字图像处理》第三版中文版下载
2023年《数字图像处理》第三版中文版下载数字图像处理第三版中文版【所属分类】计算机计算机辅助设计与工程计算MATLAB教材征订教材高等理工教材计算机教材本科/研究生计算机辅助设计本书是把图像处理基础理论论述与软件实践方法相结合的第一本书,它集成了冈萨雷斯和伍兹所著的《数字图像处理》一书中的重要内容和MathWorks 公司的图像处理工具箱。
本书的特色在于它重点强调了怎样通过开发新代码来增强这些软件工具。
本书在介绍MATLAB编程基础知识之后,讲述了图像处理的主要内容,具体包括亮度变换、线性和非线性空间滤波、频率域滤波、图像复原与配准、彩色图像处理、小波、图像数据压缩、形态学图像处理、图像分割、区域和边界表示与描述以及对象识别等。
开发了超过60个新的图像处理函数;详细涉及了在MATLAB中使用C代码的方法;提供了114个示例、400多幅图像、150多幅图形和线条图;书中使用的所有MATLAB函数、图像处理工具箱函数以及新函数,均已在附录中列出;详细探讨了图形用户界面(GUI)的设计;本书的配套提供全面支持(M文件、图像文件、教辅材料、更新等)。
数字图像处理第三版中文版简介数字图像处理第三版中文版内容本书是把图像处理基础理论论述与软件实践方法相结合的第一本书,它集成了冈萨雷斯和伍兹所著的`《数字图像处理》一书中的重要内容和MathWorks公司的图像处理工具箱。
本书的特色在于它重点强调了怎样通过开发新代码来增强这些软件工具。
本书在介绍MATLAB编程基础知识之后,讲述了图像处理的主要内容,具体包括亮度变换、线性和非线性空间滤波、频率域滤波、图像复原与配准、彩色图像处理、小波、图像数据压缩、形态学图像处理、图像分割、区域和边界表示与描述以及对象识别等。
本书概念清晰,层次分明,可供从事信号与信息处理、计算机科学与技术、通信工程、地球物理、医学等专业的大专院校师生学习参考,也可供相应的工程技术人员参考使用。
冈萨雷斯数字图像处理第3版第4章习题4.164.43备课讲稿

4.16 证明连续和离散二维傅里叶变换都是平移和旋转不变的。
首先列出平移和旋转性质:002(//)00(,)(,)j u x M v y N f x y e F u u v v π+⇔-- (4.6-3) 002(//)00(,)(,)j x r M y v N f x x y y F u v e π-+--⇔ (4.6-4)旋转性质:cos ,sin ,cos ,sin x r y r u v θθωϕωϕ====00(,)(,)f r F θθωϕϕ+⇔+ (4.6-5) 证明:由式(4.5-15)得:由式(4.5-16)得:依次类推证明其它项。
4.17 由习题4.3可以推出1(,)u v δ⇔和(,)1t z δ⇔。
使用前一个性质和表4.3中的平移性质证明连续函数00(,)cos(22)f t z A u t v z ππ=+的傅里叶变换是0000(,)[(,)(,)]2AF u v u u v v u u v v δδ=+++-- 证明:000000002()2()002()2()2()2()2()2()2((,)(,)cos(22)[]222j ut vz j ut vz j u t v z j u t v z j ut vz j u t v z j u t v z j ut vz j u F u v f t z e dtdzA u t v z e dtdzA e e e dtdzA A e e dtdz e e πππππππππππ∞∞-+-∞-∞∞∞-+-∞-∞∞∞+-+-+-∞-∞∞∞+-+-+--∞-∞==+=+=+⎰⎰⎰⎰⎰⎰⎰⎰)00000000(,)(,)22[(,)(,)]2t vz dtdz A Au u v v u u v v Au u v v u u v v δδδδ∞∞+-∞-∞=--+++=--+++⎰⎰ 4.18 证明离散函数(,)1f x y =的DFT 是1,0{1}(,)0,u v u v δ==⎧ℑ==⎨⎩其它证明:离散傅里叶变换112(//)00(,)(,)M N j ux M vy N x y F u v f x y e π---+===∑∑112(//)00112(//)00{1}M N j ux M vy N x y M N j ux M vy N x y e e ππ---+==---+==ℑ==∑∑∑∑如果0u v ==,{1}1ℑ=,否则:1100{1}{cos[2(//)]sin[2(//)]}M N x y ux M vy N j ux M vy N ππ--==ℑ=+-+∑∑考虑实部,1100{1}cos[2(//)]M N x y ux M vy N π--==ℑ=+∑∑,cos[2(//)]ux M vy N π+的值介于[-1, 1],可以想象,1100{1}cos[2(//)]0M N x y ux M vy N π--==ℑ=+=∑∑,虚部相同,所以1,0{1}(,)0,u v u v δ==⎧ℑ==⎨⎩其它4.19 证明离散函数00cos(22)u x v y ππ+的DFT 是00001(,)[(,)(,)]2F u v u Mu v Nv u Mu v Nv δδ=+++--证明:000000112(//)00112(//)0000112()2()2(//)00112()2(//)00(,)(,)cos(22)1[]21{2M N j ux M vy N x y M N j ux M vy N x y M N j u x v y j u x v y j ux M vy N x y M N j u x v y j ux M vy N x y F u v f x y e u x v y e e e e e e πππππππππ---+==---+==--+-+-+==--+-+====+=+=∑∑∑∑∑∑∑∑000000112()2(//)0011112(//)2(//)2(//)2(//)00000000}1{}21[(,)(,)]2M N j u x v y j ux M vy N x y M N M N j Mu x M Nv y N j Mu x M Nv y N j ux M vy N j ux M vy N x y x y e e e e e e u Mu v Nv u Mu v Nv ππππππδδ---+-+==----+-+-+-+====+=+=+++--∑∑∑∑∑∑4.20 下列问题与表4.1中的性质有关。
(完整版)数字图像处理第三版中文答案解析冈萨雷斯
第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。
数字图像处理第三版中文答案解析冈萨雷斯
第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。
数字图像处理 第三版 (冈萨雷斯,自己整理的1)
1.1 图像与图像处理的概念图像(Image):使用各种观测系统以不同形式和手段观测客观世界而获得的,可以直接或间接作用于人眼并进而产生视觉的实体。
包括:·各类图片,如普通照片、X光片、遥感图片;·各类光学图像,如电影、电视画面;·客观世界在人们心目中的有形想象以及外部描述,如绘画、绘图等。
数字图像:为了能用计算机对图像进行加工,需要把连续图像在坐标空间和性质空间都离散化,这种离散化了的图像是数字图像。
图像中每个基本单元叫做图像的元素,简称像素(Pixel)。
数字图像处理(Digital Image Processing):是指应用计算机来合成、变换已有的数字图像,从而产生一种新的效果,并把加工处理后的图像重新输出,这个过程称为数字图像处理。
也称之为计算机图像处理(Computer Image Processing)。
1.2 图像处理科学的意义1.图像是人们从客观世界获取信息的重要来源·人类是通过感觉器官从客观世界获取信息的,即通过耳、目、口、鼻、手通过听、看、味、嗅和接触的方式获取信息。
在这些信息中,视觉信息占70%。
·视觉信息的特点是信息量大,传播速度快,作用距离远,有心理和生理作用,加上大脑的思维和联想,具有很强的判断能力。
·人的视觉十分完善,人眼灵敏度高,鉴别能力强,不仅可以辨别景物,还能辨别人的情绪。
2.图像信息处理是人类视觉延续的重要手段非可见光成像。
如:γ射线、X射线、紫外线、红外线、微波。
利用图像处理技术把这些不可见射线所成图像加以处理并转换成可见图像,可对非人类习惯的那些图像源进行加工。
3.图像处理技术对国计民生有重大意义图像处理技术发展到今天,许多技术已日益趋于成熟,应用也越来越广泛。
它渗透到许多领域,如遥感、生物医学、通信、工业、航空航天、军事、安全保卫等。
1.3 数字图像处理的特点1. 图像信息量大每个像素的灰度级至少要用6bit(单色图像)来表示,一般采用8bit(彩色图像),高精度的可用12bit 或16bit。
(完整word版)数字图像处报告(冈萨雷斯)版
一、课程设计目的1.提高分析问题、解决问题的能力,进一步巩固数字图像处理系统中的基本原理与方法。
2.熟悉掌握一门计算机语言,可以进行数字图像的应用处理的开发设计。
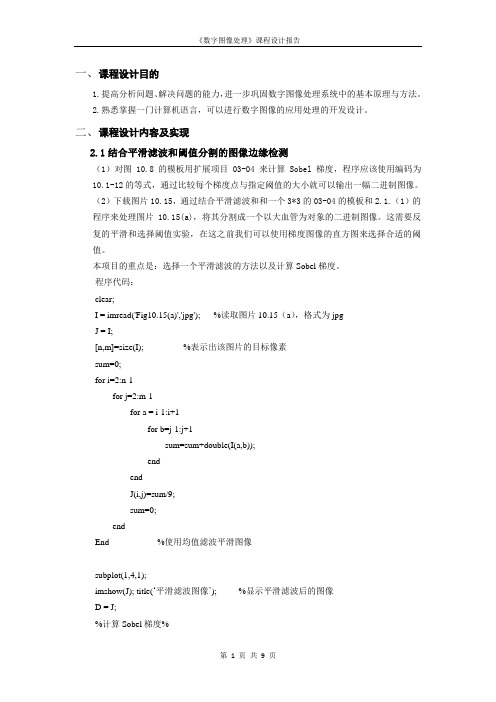
二、课程设计内容及实现2.1结合平滑滤波和阈值分割的图像边缘检测(1)对图10.8的模板用扩展项目03-04来计算Sobel梯度,程序应该使用编码为10.1-12的等式,通过比较每个梯度点与指定阈值的大小就可以输出一幅二进制图像。
(2)下载图片10.15,通过结合平滑滤波和和一个3*3的03-04的模板和2.1.(1)的程序来处理图片10.15(a),将其分割成一个以大血管为对象的二进制图像。
这需要反复的平滑和选择阈值实验,在这之前我们可以使用梯度图像的直方图来选择合适的阈值。
本项目的重点是:选择一个平滑滤波的方法以及计算Sobel梯度。
程序代码:clear;I = imread('Fig10.15(a)','jpg'); %读取图片10.15(a),格式为jpgJ = I;[n,m]=size(I); %表示出该图片的目标像素sum=0;for i=2:n-1for j=2:m-1for a = i-1:i+1for b=j-1:j+1sum=sum+double(I(a,b));endendJ(i,j)=sum/9;sum=0;endEnd %使用均值滤波平滑图像subplot(1,4,1);imshow(J); title(‘平滑滤波图像’); %显示平滑滤波后的图像D = J;%计算Sobel梯度%for i=2:n-1for j=2:m-1df = abs(double(J(i+1,j-1))+2*double(J(i+1,j))+double(J(i+1,j+1))-(double(J(i-1,j-1))+2*double(J (i-1,j))+double(J(i-1,j+1))))+abs(double(J(i-1,j+1))+2*double(J(i,j+1))+double(J(i+1,j+1))-( double(J(i-1,j-1))+2*double(J(i,j-1))+double(J(i+1,j-1))));=D(i,j) = df;endendsubplot(1,4,2);imshow(D);title(‘Sobel梯度图像’);subplot(1,4,3);imhist(D);title(‘梯度图像直方图’);%使用70为阈值对梯度图像进行处理%for i=1:nfor j=1:mif D(i,j)>70D(i,j)=255;elseD(i,j)=0;endendendsubplot(1,4,4);imshow(D);title(‘处理后的二进制图像’);结果如下:图2.12.2全局阈值(1)使用章节10.3.3中讨论的自动阈值估计程序得到全局阈值,最终输出一个二进制图像。
数字图像处理 第三版 (冈萨雷斯,自己整理的2)
1. 数字数据传输通常用波特率度量,其定义为每秒钟传输的比特数。
通常的传输是以一个开始比特,一个字节(8 比特)的信息和一个停止比特组成的包完成的。
基于这个概念回答以下问题:(a) 用56K 波特的调制解调器传输一幅1024×1024、256 级灰度的图像需要用几分钟?(b) 以750K 波特[这是典型的电话DSL(数字用户线)连接的速度]传输要用多少时间?解:(a)T=M/56000=(1024×1024)×(8+2)/56000=187.25s=3.1min(b) T=M/56000=(1024×1024)×(8+2)/750000=14s2.两个图像子集S1和S2图下图所示。
对于V={1},确定这两个子集是(a)4-邻接,(b)8-邻接,(c)m-邻接。
a) S1 和S2 不是4 连接,因为q 不在N4(p)集中。
(b) S1 和S2 是8 连接,因为q 在N8(p)集中。
(c) S1 和S2 是m 连接,因为q 在集合N D(p)中,且N4(p)∩ N4(q)没有V 值的像素3. 考虑如下所示的图像分割(a) 令V={0,1}并计算p 和q 间的4,8,m 通路的最短长度。
如果在这两点间不存在特殊通路,试解释原因。
(b) 对于V={1,2}重复上题。
解:(a) 当V={0,1}时,p 和q 之间不存在4 邻接路径,因为不同时存在从p 到q 像素的4 毗邻像素和具备V 的值,如图(a)p 不能到达q。
8 邻接最短路径如图(b),最短长度为4。
m邻接路径如图(b)虚线箭头所示,最短长度为5。
这两种最短长度路径在此例中均具有唯一性。
(b) 当V={1, 2}时,最短的4 邻接通路的一种情况如图(c)所示,其长度为6,另一种情况,其长度也为6;8 邻接通路的一种情况如图(d)实线箭头所示,其最短长度为4;m 邻接通路的一种情况如图(d)虚线箭头所示,其最短长度为6.或解: (1) 在V={0,1}时,p和q之间通路的D4距离为∞,D8距离为4,Dm距离为5。
数字图像处理课件(冈萨雷斯第三版)英文翻译优秀课件
The image on the left is the image processing technique . Used to test computer algorithms A standard image of actual effects . The name of this image is lenna . It is made up of a set of numbers. Original image The width and height are 256 pixels each .There are eight bits in pixels. It is in BMP form at About 66K bytes in size.
The objective world is a three-dimensional space, but the general image is two-dimensional. Two dimensional images inevitably lose part of the information in the process of reflecting the three-dimensional world. Even recorded information can be distorted and even difficult to recognize objects. Therefore, it is necessary to recover and reconstruct information from images, and to analyze and extract mathematical models of images so that people can have a correct and profound understanding of what is recorded in the image. This process becomes the process of image processing.
Digital Image Processing - 3rd Edition [Gonzalez] 数字图像处理 冈萨雷斯 第三版 勘误表
![Digital Image Processing - 3rd Edition [Gonzalez] 数字图像处理 冈萨雷斯 第三版 勘误表](https://img.taocdn.com/s3/m/8159fcca9ec3d5bbfd0a746d.png)
Corrections and Clarifications Digital Image Processing3rd EditionGonzalez and WoodsPrentice Hall© 2008December 5, 2013CORRECTIONS05 December, 2013The bottom, leftmost pixel in the Marker Image, F, should be white.The caption in Fig. 9.32(a) should read: Reconstruction-by-dilation of marker image.05 December, 201305 December, 2013CLARIFICATIONSPageClarifications59, last sentence, 2ndparagraph. It is assumed also that the physical dimensions of the chips are the same.117, 2nd paragraph of Ex 3.3.Figure 3.12(c) was generated with a transformation function of the form shown in Fig. 3.11(b), but with the value of the constant part of the curve set to 0 instead of the high value shown in Fig. 3.11(b) .661, Fig. 9.31(c). Although the image appears as a uniform black rectangle (all 0s), there are 1-valued points along its boundary that are difficult to see at the image scale shown and also because the background (page) iswhite (i.e., 1-valued). See the 3rd sentence in the first paragraph of page 661.694, Fig. 10.2(a). The image in Fig. 10.2(a) should have the dot shown.In some printings of the book the dot is barely visible, while in others it shows perfectly, as in the image shown on the right. Also, small, random printing imperfections that sometimes show in white or gray can be confusing, and should beignored. [Note: If you'reusing a low resolution monitor you may need to magnify this document in order to see the dot.]697, Fig. 10.4(d) The image in Fig. 10.4(d) should have the single dotshown. The image is black (0) elsewhere. In some printings of the book the dot is barely visible, while in others it shows perfectly, as in the image shown on the right. Also, small, random printing imperfections that sometimes show in white or gray can be confusing, and should be ignored. The correct image consists of a single white dot on a uniform black background.872, Fig. 12.9(d). The image in Fig. 10.9(d) should have the single whitedot shown. The image is black (0) elsewhere. In some printings of the book the dot is barely visible, while in others it shows perfectly, as in the image shown on the right. Also, small random printing imperfections that sometimes show in white or gray can be confusing, and should be ignored. The correct imageconsists of a single white dot on a uniform black background.05 December, 2013Pg 655, Fig, 9.25 Edit figure to look like the one on the right.773, Fig. 10.55.Note that the pixel identified by the arrow in the top left of the figure is missing in the figure in the book.。
冈萨雷斯数字图像处理第3版第4章习题416443

4.16证明连续和离散二维傅里叶变换都是平移和旋转不变的。
首先列出平移和旋转性质:/(X, 加 o F(u一%—v())(4.6-3)f(x-x0,y-y0) o F(“,叹-山初jb仞(4.6-4)旋转性质:/(匚 & + q)o 0 + %) (4.6-5)证明:由式(4.5-15)得:山式(4.5-16)得:依次类推证明其它项。
4.17由习题4.3可以推出lo》(“,V)和刃,z)ol。
使用前一个性质和表4.3中的平移性质证明连续函数f(/, z) = Acos(2/r“o/ + 2別旅)的傅里叶变换是证明:4.18证明离散函数/(.v, y) = 1的DFT是证明:离散傅里叶变换如果“=卩=0, 3{1} = 1,否则:—考虑实部,3{l} =》Ycos[2/rS/M+i7/N)], cos[2^ux/M+vy/N)]的值介x-0 v-05/-1 iV-11],可以想象,3{1} =工工cos[2/r("x/M+*y/N)] = O,虚部相同,所以,v-0 v-04.19证明离散函数COS(2^H0X + 2^v0y)的DFT是证明:.W-l N7F(w,v) =工工/(兀)疋呦皿"川)A-0 VU).W-l N-1=£工cos(2和°x + 2“』)不人“皿曲).Y-0 v-<)€丿2皿炉+忖)+ 0-/2*%屮切比-左龙(瞅/M+vy/N)1 J W-1 N-\ _ 丄{ j2穴(如A +忖怯-丿2M U 7M+V WN)+j2x (u (|X+vo.v)^-^Z/Tfat/W+vv/jVj j2 x-0 y-0 A-0 v-0 1 J W-1 JV-1 _ 1 { 0 j2龙(AfgiVAf 十N%y/N )i 厂+vy/N)〔+J V V ()V /^ -/2^(uv/A/-^vy/N}2 x.(> v-() x-(> v-0=—[J(// + iWz/0, v + Nv^) + J(w - Mz/0, v - A^v 0)]4.20下列问题与表4.1中的性质有关。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形)对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()01702302.x .d =解得x=0.06d 。
根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.⨯π成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。
如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说, 眼睛不能检测到以下直径的点:m .d .x 61011060-⨯<=,即m .d 610318-⨯<2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。
2.1节描述的视觉过程在这种情况下起什么作用?亮度适应。
2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。
美国的商用交流电频率是77HZ 。
问这一波谱分量的波长是多少?光速c=300000km/s ,频率为77Hz 。
因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为:])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。
为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。
如果图像用k 比特的强度分辨率进行数字化,并且眼睛可检测相邻像素间8种灰度的突变,那么k 取什么值将导致可见的伪轮廓? 解:题中的图像是由:()()()()()[]()()[]20202020********y y x x y y x x e .e y ,x r y ,x i y ,x f -+---+--=⨯==一个截面图像见图(a )。
如果图像使用k 比特的强度分辨率,然后我们有情况见图(b ),其中()kG 21255+=∆。
因为眼睛可检测4种灰度突变,因此,kG 22564==∆,K= 6。
也就是说,k2小于64的话,会出现可见的伪轮廓。
2.9(a) 传输数据包(包括起始比特和终止比特)为:N=n+m=10bits 。
对于一幅2048×2048 大小的图像,其总的数据量为()N M ⨯=22048,故以56K 波特的速率传输所需时间为:()()min .s .M T 48129874856000282048560002==+⨯==(b) 以3000K 波特的速率传输所需时间为()()s .M T 9813300000028204830000002=+⨯==2.10解:图像宽高比为16:9,且水平电视线的条数是1080条,则:竖直电视线为1080×(16/9)=1920 像素/线。
由题意可知每场用1s 的1/60,则:每帧用时2×1/60=1/30 秒。
则该系统每1/30 秒的时间形成一幅1920×1080 分辨率的红、绿、蓝每个像素都有8 比特的图像。
又因为90min 为5400 秒,故储存90min 的电视节目所需的空间是:s .bits .byte 10001110062854003038192010801212⨯=⨯=⨯⨯⨯⨯⨯2.11解:p 和q 如图所示:(a) 1S 和2S 不是4 邻接,因为q 不在()p N 4集中。
(b) 1S 和2S 是8 连接,因为q 在()p N 8集。
(c) 1S 和2S 是m 连接,因为q 在集合()p N D 中,且()()q N p N 44 没有V 值的像素。
2.12 提出将一个像素宽度的8通路转换为4通路的一种算法。
解:找出一个像素点的所有邻接情况,将对角元素转化成相应的四邻接元素。
如下图所示:2.13 提出将一个像素宽度的m 通路转换为4通路的一种算法。
解:把m 通道转换成4 通道仅仅只需要将对角线通道转换成4 通道,由于m 通道是8 通道与4 通道的混合通道,4 通道的转换不变,将8 通道转换成4 通道即可。
如图所示: (1) 4 邻域关系不变(2) 8 领域关系变换如下图所示2.15 (没答案,自己做的,看对不对)(1)在V={0,1,2}时,p和q之间通路的D4距离为8(两种情况均为8),D8距离为4,D m距离为6。
(2) 在V={2,3,4}时,p和q之间通路的D4距离为∞,D8距离为4,D m距离为5。
p 和q 之间不存在4 邻接路径,因为不同时存在从p 到q 像素的4 毗邻像素和具备V 的值,情况如图(a)所示。
p 不能到达q。
2.16解:(a) 点p(x ,y )和点q(s ,t)两点之间最短4 通路如下图所示,其中假设所有点沿路径V 。
路径段长度分别为t y s x --和,由D4距离的定义可知,通路总长度| X-S|+| Y-T|,(这个距离是独立于任何点之间可能存在的任何路径),显然4D 距离是等于这两点间的最短4通路。
所以当路径的长度是t y s x -+-,满足这种情况。
(b) 路径可能未必惟一的,取决于V 和沿途的点值。
2.18由公式H [f(x,y)]=g(x,y)(2.6-1),让H 表示相邻的和操作,让1S 和2S 表示两个不同子图像区的小值,并让1S + 2S 表示相应的总数1S 和2S 像素,如在2.5.4节里的解释. 注意到附近的大小(即像素数字)并没有随着这总和的改变而改变。
H 计算像素值是一个给定的区域。
然后,()21bS aS H +意味着:(1)在每个子区域里乘像素,(2)从1aS 到2bS 每个像素值相加(首先产生一个单独的子区域)(3)在单独的子图像区域里计算所有像素值的和。
让1ap 和2ap 表示两个任意(但相应的)像素21bS aS +。
然后我们可以依据Eq.(2.6 - 1),表明H 是一个线性算子。
2.19(两个版本答案,一个意思)(1)中值ζ表示,数集的一半数值比它大,另一半比它小。
一个简单的例子能够表明,Eq.(2.6 - 1)的平均算子操作。
让 S1 = {1,-2,3}, S2 = {4,5, 6}, a = b = 1. 在这种情况下,H 是平均算子。
然后有H(S1 + S2)=中值{ 5,3,9 } = 5,S1 + S2是S1和S2的和。
接下来,计算H(S1)=中值{ 1、-2、3 } =1和H(S2)=中值{ 4、5、6 } = 5。
然后,从H(aS1 + bS2)≠aH(S1)+ bH(S2),因此,子图像区域S 中值的算子是非线性的。
(2)2.20因为()()()y ,x y ,x f y ,x g η+= ()==∑11,(,)Ki ig x y g x y K()=⎡⎤⎡⎤=⎢⎥⎣⎦⎣⎦∑11,(,)Ki i E g x y E g x y K ()()()η=⎡⎤=+⎢⎥⎣⎦∑11,,Kiii E f x y x y K()()()η==⎛⎫⎛⎫=+= ⎪ ⎪⎝⎭⎝⎭∑∑1111,,,K K i i i i E f x y E x y f x y K K ()σσ=⎛⎫⎡⎤= ⎪⎣⎦⎝⎭∑2211,(,)Ki i g x y g x y K()()()ση=⎡⎤=+⎢⎥⎣⎦∑2211,,K i i i f x y x y K()()ησσησ==⎛⎫⎛⎫=+=⎪ ⎪⎝⎭⎝⎭∑∑2222211111,,K K i i i i f x y x y K K K2.23 (没答案 看看做的对不对)(a) 为A 的补集(b) C B A()()()C B A C A C B B A 2- ()()C B B A B C A -- 2.24(看看翻的对不对)答:使用三角区即三个约束点,所以我们可以解决以下的系数为6的线性方程组:654321c y c x c y c y c x c x ++='++='实施空间变换。
插值强度可使用2.4.4节的方法。
2.25(看看翻的对不对)傅里叶变换核是可分的,因为:()()()()()()v ,y r u ,x r e e e v ,u ,y ,x r N /vy j M /ux j N /vy M /ux j 21222===--+-πππ傅里叶变换核是对称的,因为:()()()()()v ,y r u ,x r e e e N /vy j M /ux j N /vy M /ux j 11222==--+-πππ2.26(看看翻的对不对)由可分离变换核的定义知其中:当x 值固定时,可看作f(x,y)某一行的一维变换,当x 从0变换到M-1时计算出整个数组T (x,v ),然后,通过替换这个数组的最后一行以前的方程我们可以得到T (x,v )按列的一维变换。
也就是说,当一个图像是内核可分的,我们可以计算图像沿行的一维变换,然后我们计算中间的一列得到最终的二维变换T(u,v).这和先计算列的一维变换再计算中间行得到二维变换最终结果是相同的。
从式(2.6-33),二维傅里叶变换是由:它很容易验证,傅立叶变换核是可分离的(参见题2.25),所以我们可以写这个方程:是沿着f(x,y)行的一维傅里叶变换,X= 0,1,……,M-1。
第三章(a )由2)(Kr Aer T s -==,3/20A Ae KL =-得:)3/1ln(20=-KL ,20/0986.1L K =2200986.1)(r L Aer T s -==(b )、由, 4/)1(20B eKL =--B 得:)4/3ln(20=-KL ,20/2877.0L K =)1()(2202877.0r L eB r T s --==(c )、3.4逐次查找像素值,如(x ,y )=(0,0)点的f (x ,y )值。
若该灰度值的4比特的第0位是1,则该位置的灰度值全部置1,变为15;否则全部置0,变为0。
因此第7位平面[0,7]置0,[7,15]置1,第6位平面[0,3],[4,7]置0,[8,11],[12,15]置15。
依次对图像的全部像素进行操作得到第0位平面,若是第i 位平面,则该位置的第i 位值是0还是1,若是1,则全置1,变为15,若是0,则全置0设像素的总数为n ,是输入图像的强度值,由,rk对应sk ,所以,由 和得由此得知,第二次直方图均衡化处理的结果与第一次直方图均衡化处理的结果相同,这里我们假设忽略不计四舍五入的误差。