Kirchhoff应力张量
基于纤维增强超弹性基体模型的骨骼肌有限元模拟
现时长度函数可以根据希尔方程确定[ 6] , 研究 中选用的长度函数与 Johansson 一致[ 11] 。
将希尔方程转化为无量纲形式[ 13] , 即
=
0
1- v v0 1+ c v v0
( 4)
式中, 最大速度 v0 =
b a
0
,
c=
0
a
。
由上式定义速度函数为
f v( s) =
1- s 1 + cs
图 3 肌肉单 轴应变( 时间为 0 5 s) 。( a) x 方向; ( b) y 方向; ( c) z 方向 Fig. 3 The uniaxial strain of the muscle ( t = 0 5 s) . ( a) x direction; ( b) y direction; ( c) z direction
引言
骨骼肌是构成人体的重要组织, 占人体体重的 40% ~ 45% , 通过主动收缩产生应力, 经肌键作用于 骨骼上, 实现人体的各种运动。肌肉的力学响应是 人体运动的基础, 当骨骼肌受到来自神经系统的刺 激时, 它将储存于自身的化学能转化为机械能, 产生 响应外来刺激的各种运动和呼吸动作。
不同于一般工程材料, 骨骼肌的机械性能相当 复杂, 表现为非线性、不可压、各向异性和超弹性的 性能。此外, 当受到一定的外界刺激时, 能够主动收 缩发力。因此, 骨骼肌又称为生物驱动发动机。从 研究的历史进程来看, 存在两种描述主动收缩发力 的肌肉模型: 希尔模型和贺胥黎模型。后者是基于 生物物理桥联理论, 主要依赖于生物化学、热动力学 和机械试验, 在分子量级上描述肌肉行为[ 1] 。由于 此模型的数学公式过于复杂, 仅适用于肌肉微观收 缩的定性描述。希尔模型的研究基础是热动力学试
应力张量的认识(一)
应力张量的认识(一)本文主要是对材料成形相关专业学习过程中对一些问题的思考,也许并不深刻,但却是自己从初学时的迷惑到后来逐渐认识的过程。
相关还有:Levy-Mises理论的思考从本科的材料成形原理教材上就认识了应力张量,然后一直出现在我们的视野里。
初始,以一个基本定义记住了它,进而有过疑惑,随着矩阵论的学习又有了新的认识。
曾经就有记录下对其理解的想法,但因思路尚未完善而一再搁置;直到今天重新想起,完成了方向余弦作为线性空间的证明,才终于开始详细记录。
我将这部分思考分为以下三部分:应力张量的认识(一)应力张量的认识(二)应力张量的认识(三)本文介绍第一部分应力的基本知识和常规认识。
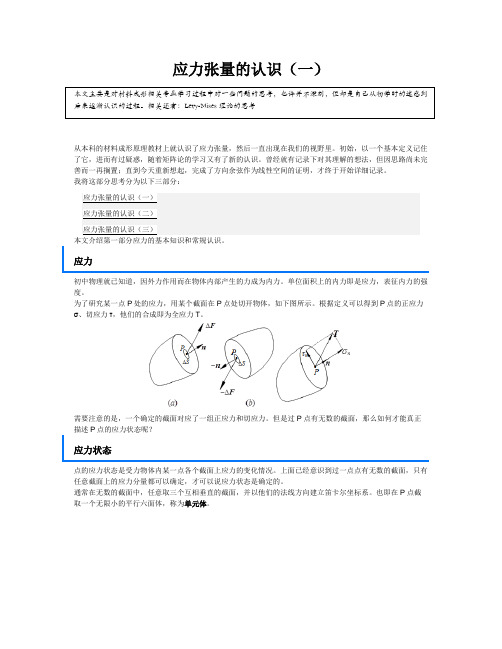
应力初中物理就已知道,因外力作用而在物体内部产生的力成为内力。
单位面积上的内力即是应力,表征内力的强度。
为了研究某一点P处的应力,用某个截面在P点处切开物体,如下图所示。
根据定义可以得到P点的正应力σ、切应力τ,他们的合成即为全应力T。
需要注意的是,一个确定的截面对应了一组正应力和切应力。
但是过P点有无数的截面,那么如何才能真正描述P点的应力状态呢?应力状态点的应力状态是受力物体内某一点各个截面上应力的变化情况。
上面已经意识到过一点点有无数的截面,只有任意截面上的应力分量都可以确定,才可以说应力状态是确定的。
通常在无数的截面中,任意取三个互相垂直的截面,并以他们的法线方向建立笛卡尔坐标系。
也即在P点截取一个无限小的平行六面体,称为单元体。
单元体无限小,视为一点,因此单元体上相互平行的两个平面视为过该点的同一平面,也即他俩的应力是相同的。
这样就只用三个互相垂直的截面上的应力来分析问题。
由于单元体处于静力平衡状态,由绕各轴合力矩为零可以得到切应力互等定律。
问题:既然单元体上相互平行的两个平面视为过该点的同一平面,那为什么上图平行的平面上应力是相反的?单元体上相互平行的两个平面视为过该点的同一平面,但是分别是被截开的的两部分的平面,截开前他们是重合的,截开后成为了两部分各自的表面,而外表面是有方向的。
基于Odgen模型O型橡胶密封圈的大变形接触分析
基于Odgen模型O型橡胶密封圈的大变形接触分析桑建兵;邢素芳;刘宝会;王静远;刘春阳【摘要】By utilizing nonlinear finite element analysis softwareMSC.Marc,the material parameters of Odgen model were determined through curve fitting by using the experimental data of uniaxial tensile experiments of rubber-like materi-als.The nonlinear finite element model of rubber O-ring seals was set up and the influence of different medium pressure on the mechanical properties of rubber O-ring seals was analyzed.The distribution of Von-mises stress and contact stress on primary contact surface and side contact surface was achieved.The results show that with the increase of medium pressure, the Von-mises stress is increased and transfered to the contact zone between rubber seal and groove,and its distribution on primary contact surface and side contact surface is approximate quadratic parabola.The maximum contact stress appears on the middle contact zone,and it is increased obviously with the increases of medium pressure.The maximum contact stress is greater than medium pressure,which can prevent the leakage of medium.%利用大型非线性有限元软件MSC.Marc,基于橡胶类材料单轴拉伸所得到的应力应变曲线,通过数据拟合确定Odgen模型的材料参数。
第05讲-应力张量

主方向——主平面的法线方向(主应力方向)
主应力
1、主应力的求解
旋转坐标轴,使Q点的斜面ABC 正好是主平面(τ=0),则斜面上 全应力S就是正应力σ(σ=S)。
S在三轴上的投影
S x l S y m S n z
主应力简图
受力物体内一点的应力状态,可用作用在应 力单元体上的主应力来描述,只用主应力的个数 及符号来描述一点应力状态的简图称为主应力图。 一般,主应力图只表示出主应力的个数及正、负 号,并不表明所作用应力的大小。
应力张量的分解
平均应力:
m ( x y z ) ( 1 2 3 )
x xy xz x xy xz ij yx y yz y yz zx zy z z
二阶对称 张量
主应力
1、主应力的概念
表示同一点Q的应力状态可以任选坐标轴,但其9 个分量相应改变,若选一特殊方向,使坐标面τ=0。 此平面一定存在,这是应力张量的特性。
应力椭球体
1、应力椭球体
S1 1l , S2 2m, S3 3n
l
1
S1
,m
2
S2
,n
3
S3
又 l 2 m2 n 2 1
2 1
2 S1
2 2
2 S2
2 3
2 S3
1 椭球面方程,其主半轴的长度分
别为σ1,σ2,σ3。——称应力椭球 面。它是任意斜面全应力矢量S端 点的轨迹。
应力张量的分解
J1 x ' y ' z ' ( x m ) ( y m ) ( z m ) 0
连续介质力学-3b

—
16
第 三
Ξ + K = W +Θ (3.50)
章 守 恒 定 律 和 连 续 介
∫ ∫ Ξ = ∫vρεdv
W =
G
ρf
⋅
G vdv
+
G
K
=
1 2
G
∫vρv
⋅
G vdv
GG
t (n) ⋅ vds
v
∂v
∫ ∫ Θ = ρhdv −
G q(n)ds
v
∂v
G
质 热
式中:h 为单位时间内单位质量产生的热,q(n)
恒 定
独立的状态参量个数为系统的自由度,系统的
律 和
其他状态参量可表示为独立参量的函数;
连 续 介
若状态参量不随系统内物质点而改变,称为 均匀系统;
质
热 力 学
若状态参量不随时间而变,称系统处于热力学 平衡态;
—
能
系统的热力学状态随时间变化——热力学过程
量
守 恒
热力学过程分为可逆过程和不可逆过程
14
力 为单位时间内通过物体表面单位面积流出的热量。
学 能量守恒定律的积分形式为:
—
能 量 守 恒
∫ ∫ ∫ d [
ρ(1
G v
G ⋅v
+
ε )dv
=
ρ(
G f
⋅
G v
+
h)dv
+
GG G G [t (n)⋅v − q(n)]ds
dt v 2
v
∂v
(3.51) 17
第 三 章 守 恒 定
若利用Gauss积分公式,且利用
热 力
计算固体计算力学 - 第四章 几何非线性问题

。对于某一固定时刻t这种变换可以表示为
* 拉各朗日(Lagrange)描述
t
xi t xi ( 0 x1, 0 x2 , 0 x3 )
基于变形前的构型表述变形后的构型。以变形前的各点坐标 为基本未知数,描述各个量。 根据变形的连续性要求,这种变化必须一一对应,即变换是 单值连续的。同时变换应有唯一的逆变换,也是单值连续的 * 欧拉(Eular)描述
t
t 0 ji
T
t 0
S ji
15
计算固体计算力学
各种应力张量之间的关系: (1)由质量守恒:
t
0
0
V
dV
t
t
V
dV
t
0
V
det( 0 t xi , j ) dV
0 det( t xi , j ) 0 t 0 t 0 t t t t (2) 0 Tji t t x j , m mi , ji 0 0 x j , m 0Tmi t 0 t t t t 0 0 t (3 ) t S x x Smn x x ji 0 j , m 0 i , n 0 0 0 ji t j ,m t i,n mn , t
其中:
不能求解
uk
--现实位移分量的变分; --应变的变分; --在现实位形内度量的面积载荷 --在现实位形内度量的体积载荷
t
17
计算固体计算力学
第三节 大变形情况下的本构关系
等温、绝热条件下的小变形线弹性情况,可以用三 种等效的方法描述应力和应变之间的关系
ij Dijkl kl
W ij ij
W
1 Dijkl ij kl 2
(优选)连续介质力学第二讲
引理2:
即: aijbij aijbTji aTjibij aTjibTji
tr(a b c) tr(b c a) tr(c a b)
即: aijbjk cki bjk ckiaij ckiaijbjk
可以推广于多个二阶张量点积的情况,例如 tr(a b c d)
w Jσ : D τ : D 的其它表达形式
由于: τ P FT F T FT
有: w P FT : L tr P FT T L tr F PT L
tr PT L F P : L F P : F
e h k σ : D 微分形式的热力学第一定律
其中: σ : D 为即时构形中单位体积的内力功率
定义变形功率w为
w Jσ : D τ : D
它表示参考构形中每单位体积(也就是即时构形中单位体积的J倍) 的变形功率.
引理1:设a与b为二阶张量, 则:
a : b tr(a bT ) tr(aT b) aT : bT
V
V
σ dV fdV aˆdV
V
V
V
由于域是任意的:
f a
对于体积力为零的静力学问题:
0
2.2 第二种方法 引理:在即时构型上体积分的物质导数
d dt
dV t
d
dt
divv dV
t
divvdV
所以:
dV t JdV0
J div v J
动量矩定理:
d dt
vdV
f
dV
P τ FT
分量形式:
PiA
ij
X A x j
同理:
τ P FT
ij
J ij
PiA
x j X A
简析非线性有限元法

简析非线性有限元法游潇;苏小卒【摘要】In the analysis of reinforeced concrete structures subjected to general loading conditions,the realistic constitutive model and robust analytical procedure are two key preconditions to produce reasonably accurate simulations of nonlinear behaviors of such structures.Based on the FEM analysis,suggestions for further studies are given.%采用有限元法分析一般荷载作用下的钢筋混凝土结构时,要得到对结构性能的合理准确的模拟结果,除了需要合理的本构模型,还要有先进的数值分析方法。
文中将对非线性有限元的特点做出分析,为进一步研究提供参考。
【期刊名称】《江西科学》【年(卷),期】2012(030)001【总页数】4页(P75-78)【关键词】非线性有限元;数值方法;钢筋混凝土【作者】游潇;苏小卒【作者单位】同济大学土木工程学院,上海200092;同济大学土木工程学院,上海200092【正文语种】中文【中图分类】TU311目前,钢筋混凝土结构作为一种经济、实用的结构,是我国工业与民用建筑中最为广泛采用的一种结构形式。
这类结构在各类荷载作用下的反应特性,以及合理的设计方法和构造措施,一直以来是结构研究人员和工程师们经常研究的课题。
由于钢筋混凝土是由2种性质截然不同的材料—钢筋和混凝土组合而成,因此它的性能明显的依赖于这2种材料的性能。
尤其是在非线性阶段,钢筋和混凝土本身的各种非线性性能,都不同程度地在这种组合材料中充分反映出来。
目前钢筋混凝土非线性方面的分析和研究还存在着若干有待解决的问题。
第14章-几何非线性有限元分析1

d tx2 '' d tx2 '" d tx2
d tx3 '' d tx3 '" d tx3
eijk d 0xid 0xjd 0xk
eijk d txid txjd txk
3.1 物体运动的物质描述-体积及面积变换公式
d tx1
t '' dV d tx1 "' d tx1
t t 0 i j 0
t t t ijk 0 j m
d xi x , d x j
0 0 t i j
0
t
d xn ni dA e ( x , )( x , )d xm
t 0 k n 0
0 0 0 0
d 0xn (0t xi ,l )t ni t dA eijk (0t xi ,l )(0t x j ,m )(0t xk ,n )d 0xm
初始位形两邻点的距离为
t d 0xi 0xi( tx j d tx j )0xi( tx j )0 x , d t i j xj
因此可以将变形梯度视作一种线性变换,它将参考位形 t 0 中的线元 变换为现时位形中的线元 d xi ,这变换中既 d xi 有伸缩,也有转动。变形梯度在大变形分析中很重要。
t xi t t ui t x 0 i, j ij 0 ui , j ij 0 0 xj xj
t 0 i, j
0xi t t ui t x 0 i, j ij ij t ui , j t t xj xj
t t i, j
( ds ) d xid xi
0 2 0 0
3.4 Green和Almansi应变张量
橡胶材料硬化的本构模型与有限元分析
橡胶材料硬化的本构模型与有限元分析朱艳峰;王红【摘要】针对橡胶类材料大应变时硬化现象,采用国家GB528标准,在室温下通过单轴拉伸本构实验,建立了基于主伸长的连续介质力学的新本构模型,并确定应变能密度函数中的本构参数,再利用简单剪切实验进行参数验证,表明新本构关系的可行性与有效性.最后将新本构方程加入通用有限元软件,利用非线性有限元对平面应力橡胶板进行了计算.【期刊名称】《武汉工程大学学报》【年(卷),期】2008(030)001【总页数】3页(P34-36)【关键词】橡胶类材料;材料硬化;本构模型;非线性有限元【作者】朱艳峰;王红【作者单位】广东工业大学建设学院工程力学研究所,广东,广州,510640;广东工业大学建设学院工程力学研究所,广东,广州,510640【正文语种】中文【中图分类】O3450 引言橡胶类材料产生大的应变时具有高度几何非线性、材料非线性,又呈现出硬化或软化现象,且体积不可压缩.橡胶材料的本构模型主要有[1]:a.基于分子链形式的统计学模型.b. 基于不变量形式的模型.c.基于主伸长的连续介质力学模型等.针对大应变硬化现象的本构模型目前有neo-Hookean型[2]、Mooney-Rivlin[3]型等.在对橡胶类材料的有限元分析过程中,由于其本构理论尚未成熟,导致分析结果的差别非常大.本文通过简单拉伸本构实验确定材料变形模式,用回归分析方法把实验得到的应力-应变数据拟合为一适当的应变能函数,建立了一种新的橡胶材料硬化模型,并推广到复杂的变形形式,通过验证并加入通用有限元软件,针对平面应力橡胶板进行了计算,为橡胶材料硬化时进一步的本构研究提供了基础.1 橡胶材料硬化的本构实验橡胶材料的本构实验试件采用硫化橡胶,在160℃下保持10 MPa压力,硫化6 min,配方及质量比如表1所示.表1 试件配方及质量比Table 1 The test-piece in parts by weight湛江农垦局天然橡胶(1#)SZnOSA防264N330CZTT100%1.0%4.0%2.0%1.5%3%1.0%0.2%1.1 单轴拉伸实验试件为哑铃型,如图1所示.规格尺寸符合GB528标准,室温26℃,采用岛津电子拉伸实验机,拉伸速度为(500±50) mm/min,共5组试件,试件拉力与伸长比实验曲线如图2.图1 单轴拉伸试件Fig.1 Rubber test piece for simple tension图2 拉应力t-伸长率λ曲线Fig.2 The curve of stress t versus extension1.2 简单剪切由于没有国家标准,参照Treloar1943年的实验[4],矩形试件,宽60 mm,厚2 mm,测试长度5 mm,用夹具分别夹住长边,室温160℃,拉伸速度为(500±50)mm/min,实验数据如表2.表2 简单剪切的最大应力与应变Table 2 The maximal stress and strain on simple shear试件最大应力/N·mm-2最大应变/%15.3333493.3325.6667543.3335.1333486.67平均5.3777507.782 橡胶类材料硬化时的新本构模型常温条件下,橡胶类材料为各项同性超弹性材料,本构模型以应变能函数的形式来表示,I1,I1,I3为右Cauchy-Green变形张量的第一、二、三基本不变量,在初始无应力构形且不考虑大应变硬化时应变能函数W可表示为[5]W=W(I1,I2,I3)I1=trC=C∶I=Ci iI3=detC.橡胶类材料在变形过程中近似认为体积不可压缩,变形后与变形前的体积比J=1.由本构实验,针对大应变时呈现出的明显硬化现象,本文提出一种新的应变能函数:W(λ1,λ2,λ3,φ)=μ(I1-3)(I2-3)+H(φ)φ=(λ*-λ1)(λ*-λ2)(λ*-λ3)λ1、λ2、λ3为主伸长,λ*为极限伸长.即φ为无穷时,又回到应变能不考虑硬化的传统形式,为所谓的根应变能.单轴拉伸时,第一类Piola-kirchhoff应力f=对单轴拉伸试验数据进行拟合,得:μ=0.004 8 MPa,λ*=9.47, k=9 233由此绘出拉伸曲线,如图3所示;将上述参数代入新本构方程,计算简单剪切时的f-λ曲线与实验值进行比较如图4所示.可知,本文提出的本构关系能够较好反映橡胶材料在单轴拉伸时的硬化现象,且与剪切硬化实验吻合良好,故可适用于对此类橡胶材料硬化进行力学分析.图3 单轴拉伸曲线Fig.3 The curve of simple extension图4 简单剪切曲线Fig.4 The curve of simple shear3 有限元分析第二类Piola-Kirchhoff 应力张量S与Green应变张量E存在下列关系与分别为应力张量与应变张量的率形式,因此⊗NαNα为原始构形中沿主方向的正交单位向量.本构方程中的Lagrangian弹性张量C=⊗Nα⊗Nβ⊗Nβ+⊗Nβ⊗Nα⊗Nβ因此,对于新本构函数C=Nα⊗Nα⊗Nβ-⊗Nβ⊗Nα⊗Nβ4 算例本文利用通用有限元软件,加入新本构方程,对矩形均匀伸长的橡胶薄板进行了计算,薄板长100 mm,宽50 mm,厚2 mm,中心开孔直径5 mm,近似认为平面应力.计算时利用二阶平面应力减缩积分单元,1/4橡胶薄板的网格划分与位移、应力计算结果如图5,6,7所示,此时,板伸长为15.52 mm,最大应力0.6 MPa.图5 中间开孔的1/4橡胶薄板网格划分Fig.5 Rubber elastic sheet with a circular hole - the geometry and the mesh for a quarter-sheet图6 位移分布图Fig.6 Final displaced configuration of the quarter-sheet 图7 应力分布图Fig.7 Final stress distributing of the quarter-sheet参考文献:[1]朱艳峰,刘锋,黄小清,等.橡胶材料的本构[J].橡胶工业.2006,53(1):119-125.[2]Horgan, Saccomandi. Constitutive modeling of rubber-like and biological materials with limiting chain extensibility[J]. Mathematics and mechanics of solids, 2002,(7):353-371.[3]朱艳峰,刘锋,黄小清,等.橡胶类材料大应变时明显硬化的本构分析[J].暨南大学学报.2005,26(1):98-99.[4]Treloar L R G. Stress-Strain data for vulcanized rubber under various of deformation[J]. Trans Faraday Soc, 1944,40(6):59-70.[5]Ogden R W. Non-Linear Elastic Deformations[M]. Chichester, UK:Ellis Horwood, 1984.。
第二皮奥拉-基尔霍夫应力张量
第二皮奥拉-基尔霍夫应力张量第二皮奥拉-基尔霍夫应力张量是一个用于描述非均质连续介质内部应力分布的张量。
它通常用于解决固体力学、弹性力学和流变学等领域中的问题。
该张量以法向和切向压力的梯度为基础,用以表示介质内在应力场的行为。
而二阶张量由于其两个指标,能够同时考虑空间方向和应力的耦合,更加适用于对于应力场的描述。
一般而言,第二皮奥拉-基尔霍夫应力张量可以表示为:σ_ij = -pδ_ij + 2με_ij其中,σ_ij代表某一时刻物质内部的应力,p代表介质的压力,δ_ij代表克罗内克(Kronecker)δ符号,它用于将一个索引位置的张量分量与另一个相同的索引位置分量相乘并将它们加起来。
ε_ij代表应变张量,而μ则代表剪切模量。
实际上,这个方程中的前半部分代表了压力对于应力的贡献,而后半部分则是介质变形对于应力的贡献。
比如说,如果一个物质受到压缩,那么压力将导致介质扭曲,从而会改变物质内部的应力分布。
因此,这个张量的作用就在于将不同因素的贡献整合到一个方程中,从而准确地描述物质内部应力的行为。
需要注意的是,这个方程中只考虑了刚性体(没有流动性)中的应力情况。
如果涉及流动性质的话,就需要考虑黏度和非牛顿性等因素。
总而言之,第二皮奥拉-基尔霍夫应力张量是描述非均质连续介质内部应力分布的一个重要工具。
它能够将压力和介质变形对于应力的影响综合起来,从而准确地描述整个应力场的行为。
它在多个学科领域中都有广泛的应用,包括工程力学、地质学、流体力学等。
通过对于这个张量的深入理解,我们可以更好地研究介质内部应力的行为,为如何合理地利用自然资源,设想更高效的新材料等领域,提供更为深入的基础。
聚氯乙烯膜材各向异性超弹性本构模型
质量与检测聚氯乙烯膜材各向异性超弹性本构模型安晓通(新疆天域新实化工有限公司,新疆石河子832000)摘要:为有效且充分地反映和揭示聚氯乙烯膜材料在拉剪耦合应力作用条件下发生的大变形特性、非线性特性,以及各向异性等多样化的力学特性,本项研究基于纤维增强复合材料连续介质力学基本理论,借由将应变能解耦成经向纤维束与纬向纤维束的拉伸变形能,以及两向纤维束之间的角度变化产生的剪切变形能,建构形成了针对聚氯乙烯膜材的各项异性本构模型。
本文围绕聚氯乙烯膜材各向异性超弹性本构模型论题,择取两个具体方面展开了简要阐释。
关键词:聚氯乙烯膜材;各向异性;超弹性本构关系;拉剪耦合从材料技术特性角度展开阐释分析,聚氯乙烯膜材具备材料非线性特点,拉伸技术过程中编织结构卷曲转换几何非线性特点,以及能促使各组分材料之间在协同受力条件下摩搽接触非线性特点,在力学行为方面,该种材料整体上呈现大变形、非线性和各向异性的技术特点。
在现阶段常规组织开展的工程设计活动过程中,通常倾向于将聚氯乙烯膜材假设成一种线弹性材料类型,由于在主要技术参数项目的选取和确定过程中不能全面充分地反应和迎合上述的力学技术行为特征,在一定程度上给膜结构设计方案形成过程中的可靠性造成了不良影响。
有鉴于上述研究背景,本文将会围绕聚氯乙烯膜材各向异性超弹性本构模型论题,展开简要阐释。
1聚氯乙烯膜材本构模型已有研究回顾针对聚氯乙烯膜材本构模型展开的研究分析,主要基于宏观表征模型,以及细观机理模型两个具体方面加以展开。
细观机理模型在形成过程中,主要将聚氯乙烯膜材的细观结构特征和变形机理作为基点,在纱线模拟基础上建构形成编织结构的数值模型或者是理论模型,考量到经向纤维与纬向纤维之间存在的相互作用因素、纤维材料发生的卷曲变形因素、纤维材料与涂层之间发生的伸长因素,以及纤维材料与涂层之间的相互摩擦等,具体建构材料细观本构关系模型,之后遵照实验过程中获取的相关数据,反向推导获取模型中包含的各项相关参数。
演示文稿连续介质力学第二讲

所以:
J J X A vi J vi Jdiv v xi X A xi
div v 0
2. 动量方程 (Balance of linear momentum )
2.1 以前的推导
在即时构形中,任意取一个域V ,体积元记为dV
对此域运用动量定理:
σ nda fdV aˆdV
d dt
vdV
f
dV
ቤተ መጻሕፍቲ ባይዱ
σ
nda
dv vdivv σ f
dt
div v 0
3. 角动量方程 (Balance of angular momentum ) 所以:
4. 守恒率的一般形式 如果采用欧拉描述,上述三个守恒率可表达为:
固体力学常采用拉格朗日描述:
其中: 拉格朗日描述中,体元体积不变:
可以推广于多个二阶张量点积的情况,例如 tr(a b c d)
w Jσ : D τ : D 的其它表达形式
由于: τ P FT F T FT
有: w P FT : L tr P FT T L tr F PT L
引理1:设a与b为二阶张量, 则:
a : b tr(a bT ) tr(aT b) aT : bT
引理2:
即: aijbij aijbTji aTjibij aTjibTji
tr(a b c) tr(b c a) tr(c a b)
即: aijbjk cki bjk ckiaij ckiaijbjk
对物质坐标求散度
5. 能量平衡律 在即时构型中任意v域内的总能量P由动能K与内能E组成,即
PKE
E edV
V
根据热力学第一定律,总能量P的物质导数,即对时间的 变化率等于作用于v域的外力功率与每单位时间从v域外部 所加的热:
应力张量

Kirchhoff应力张量
从一点应力状态分析,Cauchy应力张量描述的 是变形构形中点的应力状态,而Lagrange、 Kirchhoff则是描述初始构形中点的应力状态,不过 这个点是由变形构形中的点对应过来的,故是特定 的。 只有Cauchy应力张量真实反映了客观物理现象。 而Lagrange、Kirchhoff应力张量只是为了便于应用 的“近似计算”。
谢谢!
在大变形问题中,是从变形后的物体中截取出 微元体建立平衡方程和与之相等效的虚功原理,如 果应变是用变形前的坐标表示的Green应变张量,则 需要定义与之对应的关于变形前位形的应力张量。
Kirchhoff规定:变形前面积元上的内力分量和 变形后面积元上的内力分量的变换与标变换一致。
dT F dT
K1ຫໍສະໝຸດ 三种应力张量的区别和联系Cauchy应力张量定义于Euler描述,应力是空间 坐标的函数,力矢作用在变形后的面元上,由此算 得的应力就是真实应力,但由于应用时边界条件常 用物质坐标给出,用空间坐标给出边界条件十分困 难,加之本构方程也常采用Lagrange描述,故用 Cauchy应力张量求解边值问题还须作进一步变换。
Kirchhoff应力张量
3
4
仿照
t n
和
*
t
N
,我们也有
**
t N
因为
N dA0 dp F1 dp F1 (N )dA0
N ( N ) (F1)T
所以
(F1)T (两种应力张量之间的关系)
又 因为 N dA0 F1 dp F1 (n )dA (n ) (F1)T dA
** KL
)
N
K
F 1 jK
J
dA0 dA
Ti
FiL
** KL
N
K
Ti
dA dA0
又因为: FiL
yi xL
iL
ui,L
所以用Kirchoff应力张量表示的边界条件
(iL
ui
,L
)
** KL
N
K
Ti*
** KL
(
IL
uI,L )NK
TI *
8
• Lagrange应力张量相对于Cauchy应力有优点——将现实构 形的平衡问题转换为初始构形平衡问题,使边界条件的描
述变得简单.
• 但Lagrange应力张量也存在不足:因为形变梯度张量F1不
对称, *也不对称,是个两点张量。从而剪应力互等关系
不成立。
* JF1
* Ki
JFKj1
ji
* Lagrange坐标系描述的格林应变张量是对称的,这样就会导致本构关系复杂化
1
Kirchhoff应力张量
• 我们希望构造一个对称的一点广义应力张 量:Kirchhoff应力张量。
分析: Lagrange应力张量是两点应力张量的原因?
我们虽然新引入初始构形对应斜面dA0上的应力矢 t*与现时构形对应
3.应力与平衡
Tn n
Te j ei e j
i
ij ei e j , ij Te j
i
为柯西应力张量
面上的正应力
nn =Tn n=n n
Tn n
2 2 nn 11n12 22 n2 33n3 2 12 n1n2 2 23n2 n3 213n1n3
解:
作rr 对 的示意图
1.
rr在 =0和=2处 应为相同值
除非rr为常数,否则 在区域里有极值
2.
柱坐标和直角坐标应力分量转换关系
(a)
2 2 1 2 3 0 1 0 1
求rr的极值
2 2 1 2 3 0 1 0 1
1 v 1 2 3 6
斜面的面积矢量为:
1 an n= b a c a 2
an 是该斜面表面单元的面积大小,n是它的单位法向。 其中, a,b,c是组成柯西四面体直角边的边向量。
利用截点和单位基本向量:
an n=
an n=
1 1e1 2e2 1e1 3e3 2
相应的指标符号的分量方程为
S
ijk
x j lk nl dS ijk x j bk dV 0
V
根据高斯散度定理
n dS dV
S V
S
ijk
x j lk nl dS ijk
V
x j lk dV xl
lk ijk jk x j dV xl V
mni jki jk mn nm 0
所以
mn nm
kirchhoff应力转换cauchy应力
kirchhoff应力转换cauchy应力
Kirchhoff应力和Cauchy应力都是表示材料中的应力分布的数学概念。
它们之间的转换关系可以通过应力张量的变换规律来描述。
在固体力学中,应力是描述物体内部受力情况的物理量。
通常用一个二阶的张量来表示应力。
在三维空间中,应力张量可以被表示为一个3x3的矩阵。
Kirchhoff应力是一种测量物体在不同形变状态下的应力的方法。
它是在物体的当前形变状态下测量的应力。
Kirchhoff应力张量可以用物体的当前形变矩阵直接计算得到。
Cauchy应力是一种测量物体在其未发生形变之前的初始应力的方法。
它是在物体未发生形变之前测量的应力。
Cauchy应力张量可以用物体的位移梯度矩阵及其转置矩阵计算得到。
Kirchhoff应力和Cauchy应力之间的转换关系可以用下面的公式表示:
Kirchhoff应力 = J * Cauchy应力 * J^T
其中,J是物体的形变梯度矩阵。
需要注意的是,Kirchhoff应力和Cauchy应力描述了同一个应力场,只是基于不同的测量方法和参考系来表示。
因此,它们的数值大小和分布可能会有所不同,但包含的物理信息是相同的。
柯西应力张量 动量平衡方程
柯西应力张量动量平衡方程
柯西应力张量与动量平衡方程是物理学中的两个概念。
柯西应力张量是一种描述物质点在运动过程中所受到的应力的量纲,通常用于描述流体力学中的应力状态。
其定义为Σ(a)(t)=12∑b:b≠aF(ab)(t)(x(b)(t)−x(a)(t)),其中F(ab)(t)表示物质点a和b之间的相互作用力,x(a)和x(b)表示物质点a和b的位置。
动量平衡方程则是描述一个封闭系统中的动量变化率等于该系统所受到的合外力。
在连续介质力学中,动量平衡方程可以表示为ρ*(udt)dt=∫(Tj)eρ*(u·Je)dVdt,其中ρ*表示质量密度,u表示速度矢量,t表示时间,∫(Tj)e表示对整个系统的积分,Je表示单位体积的体力密度。
柯西应力张量和动量平衡方程在流体力学、气体力学、固体力学等领域都有广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 jK
0 1 dA ( J F F ) N K FjK J Ti dA dA ** FiL KL N K Ti 0 dA 1 1 1 jK iL ** KL
又因为: FiL yi iL ui , L
证明:
因为
** 1 1 1 1 J F F J F 且 IK pq Ip Kq qp Ip F Kq
所以:
** ** KI IK
进一步考察Kirchoff应力张量与Lagrange应力张量间的关系
F
T
,
* ** Ki KL FiL
* Lagrange坐标系描述的格林应变张量是对称的,这样就会导致本构关系复杂化
Kirchhoff应力张量
• 我们希望构造一个对称的一点广义应力张 量:Kirchhoff应力张量。
分析: Lagrange应力张量是两点应力张量的原因? 我们虽然新引入初始构形对应斜面dA 上的应力矢 t 与现时构形对应 斜面上 dA 的应力矢 t 不同。但我们仍假设这两个面上的合力矢量 保持 dp dpiii 不变。
0
N ( N ) (F1 )T
所以
JF
以分量形式表示
** 1 1 KI J pq FKp FIq
(F
)
* 1 (对比 Ki JFKj ji 分析 可知Kirchoff应力张量使用的均是Lagrange坐标,是一
点张量。所以 KI 表示法向为 N K 的截面上沿 xI 方向的应力分量,是假想的;
Kirchhoff应力张量
• 为避免上述情况。我们最好把用Lagrange坐标表示其法向 基矢的截面 K 上的力矢也分解到Lagrange坐标系的一组基
1 底上。我们只需要仿照 dx F dy 的变换,假定作用在变
形前微面积 dA0 上的力矢由变形后微面积dA 上的力矢dp dpiii
Kirchhoff应力张量
• Lagrange应力张量相对于Cauchy应力有优点——将现实构
形的平衡问题转换为初始构形平衡问题,使边界条件的描
述变得简单. • 但Lagrange应力张量也存在不足:因为形变梯度张量F 1不 对称, *也不对称,是个两点张量。从而剪应力互等关系 不成立。
* 1 J F * 1 JF Kj ji Ki
1 1 F dp F 经 变换得到:
dp 。则变形前微面积dA0上的
合应力矢 t dA0 dp 。
**
仿照
t n 和 t N ,我们也有
*
t
因为
**
N
N dA0 dp F1 dp F1 (N )dA0
[ ( IL uI ,L )],K p 0
** KL * I
• 同样,边界条件也可以用Kirchoff应力张量来表示
ji n j Ti ** 出发 我们由Euler应力张量表示的边界条件 : 0 dA ** 1 1 1 由 KI J pq FKp FIq 及 n N F J 可得 dA 1 1 1 ** ji J FjK FiL KL
**
称为伪应力或者广义应力。)
JF 1 (F 1 )T
** 1 1 KI J pq FKp FIq
*
观察以上两式, Kirchoff应力张量应该具有对称性。实际上:、
因为Euler应力张量
具有对称性。
pq qp
而式(*)可看做相似变换,所以Kirchoff应力张量 对称。
xL
所以用Kirchoff应力张量表示的边界条件
** ( iL ui , L ) KL N K Ti* ** KL ( IL uI , L ) N K TI *
0
*
t dA 一方面,
所以
*
0
tdA dp dpiii
0
即t
*
ti ii
。另一方面: t N
*
(这里 N 为初始构形对应斜面dA 用Lagrange坐标表示的法向基矢), 表示其法向的截面 K 上在Euler坐标 yi上的分量。
ti Ki NK
。也就是说, Ki 表示的是在由Lagrange坐标
这里我们看出Lagrange应力张量具有过渡性质。 结合由Lagrange应力张量表示的平衡微分方程
* * Ki p ,K i 0
从而得到Kirchoff应力张量表示的平衡方程 ** ( KL FiL ),K pi* 0 又因为 FiL 标系重合,所以 I 可以替换 i
yi iL ui , L 且Euler坐标系与Lagrange坐 xL
所以 又 因为
(F1 )T (两种应力张量之间的关系) N dA0 F1 dp F1 (n )dA (n ) (F1 )T dA
dA0 1 1 T N dA N F J ( F ) dA dA 1 1 T