异步电动机动态数学模型的建模与仿真.docx
异步电动机的动态数学模型完整版

四、运动方程
Te
TL
J np
d2r
dt2
TL
J np
dr
dt
(6-17)
其中:TL —负载阻力矩; J —旋转机组的转动惯量。
r 电动机转子的电角速度
由运动方程可知,当负载转矩不变时,通过控制电 磁转矩就可以控制电动机的速度变化。
小结:异步电动机的动态数学模型
电压 u R i p 方 ( 6 2 ) 程
由于磁链矩阵方程是时变矩阵的,因此异步电动机 在静止坐标系中,数学模型是时变微分方程组,因而 导致异步电动机控制复杂。
三、转矩方程
TenpL'm[i(AiaiBibiCic)sinr (iAibiBiciCia)sinr(12)0 (iAiciBiaiCib)sinr(12)0]
(61)6
转矩方程式表示电量与机械量的关系,即电动机内部 通过气隙的机电能量的转换关系。
小结:异步电动机的数学模型
Ø异步电动机动态数学模型的基本性质 上述动态数学模型方程式表明异步电动机的动态数学模
型是一组非常复杂的非线性方程,其复杂性表现在以下四 个方面:
⑴ 多变量——多输入、多输出(MIMO系统) u异步电动机变频调速需要进行电压和频率的协调控制, 所以有电压和频率两个独立的输入变量; u异步电动机通过定子供电,磁通和转速的变化是同时进 行的,为了获得良好的动态性能,需要对磁通进行控制, 所以输出变量除了转速外,还包括磁通。因此异步电动 机的数学模型是一个多输入多输出系统。
完整的磁链方程以矩阵形式可以表示为:
Ψs
Ψr
LLsrss
Lsris Lrrir
式中: ΨsA B C T Ψra b cT
isiA iB iCT
异步电动机的变频调速系统的设计与仿真word
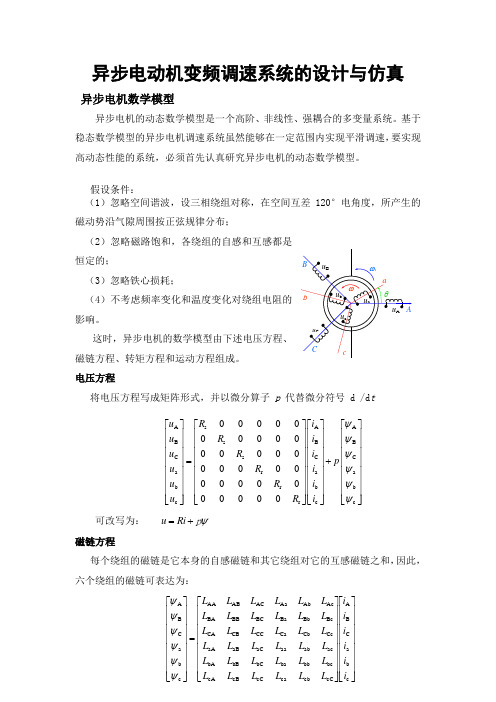
异步电动机变频调速系统的设计与仿真异步电机数学模型异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
基于稳态数学模型的异步电机调速系统虽然能够在一定范围内实现平滑调速,要实现高动态性能的系统,必须首先认真研究异步电机的动态数学模型。
假设条件:(1)忽略空间谐波,设三相绕组对称,在空间互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的;(3)忽略铁心损耗;(4)不考虑频率变化和温度变化对绕组电阻的影响。
这时,异步电机的数学模型由下述电压方程、磁链方程、转矩方程和运动方程组成。
电压方程将电压方程写成矩阵形式,并以微分算子 p 代替微分符号 d /d tA A A sB B B sC C C s a a a r b b b r c c c r 000000000000000000000000000u i R u i R u i R p u i R u i R u i R ψψψψψψ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦可改写为: u Ri ψ=+p 磁链方程每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和,因此,六个绕组的磁链可表达为:⎥⎥⎥⎥⎤⎢⎢⎢⎢⎡⎥⎥⎥⎥⎤⎢⎢⎢⎢⎡=⎥⎥⎥⎥⎤⎢⎢⎢⎢⎡C B A Cc Cb Ca CC CBCA Bc Bb Ba BC BB BA Ac Ab Aa AC AB AA C B A i i i i L L L L L L L L L L L L L L L L L L L L L L L L ψψψψ ABCu A u Bu Cω1ωu au b u ca bcθ可改写为: Li ψ=由于折算后定、转子绕组匝数相等,且各绕组间互感磁通都通过气隙,磁阻相同,故可认为:Lms Lmr =对于每一相绕组来说,它所交链的磁通是互感磁通与漏感磁通之和,因此,定子各相自感为转子各相自感为可得完整的磁链方程:sssr s s rsrr r r LL i L L i ψψ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ 转矩方程根据机电能量转换原理,在多绕组电机中,在线性电感的条件下,磁场的储能和磁共能为:'m m 1122T T W W i i L ψ===而电磁转矩等于机械角位移变化时磁共能的变化率 (电流约束为常值),且机械角位移 θm = θ / n p ,于是:''rssr mme pp r s s r mconst.const.12T T i i L L W W T n n i i i i θθθθ==∂∂∂∂⎡⎤===⋅+⋅⎢⎥∂∂∂∂⎣⎦异步电机数学模型的过程中可以看出,这个数学模型之所以复杂,关键是因为有一个复杂的 6⨯6 电感矩阵,它体现了影响磁链和受磁链影响的复杂关系。
异步电动机建模及故障仿真
、
异 步 电 动 机 的 数 学建 模
电机 的数 学 建模 在 系 统 的整 体 设 计 及 系统 仿 真
丰 富多 彩 的 图 形
中尤 为 重 要 在 系 统 仿 真 中需 要 得 到 电机 运 行 中频
符号 运 算 以 及 友好 的操作 界 面 等特 点 的科
。
学 与 工 程 计算 软 件 工 具
,
电 机 内部 零 部 件 失 效
,
导 致 电机 工 作不 正
。
(如 : W o r d ) 的 接 口
方便 了用 户 在 文 字 处 理 软 件
常甚 至 无 法 起 动 科技 的进 步
的重 要 方法
,
,
影 响机 械设 备正 常运 行
、
随着
中利 用 公 式 进 行计 算
的接 口
用
。
,
,
同时 它 也 提 供 了 和 外部 硬 件
、
具有可视性及 可移
。
学 模 型 要 比直 流 电机 复杂得 多 系统 的 数 学 模 型
,
为 了 简 化 整 个交流
编 程 效率高
、
质 量 可 靠等特 点
,
通 常 只用 其线 性 化模 型
不 仅提供 了和 其它语 言的接 口
能够保证 与其它
1
.
华安机 械 有 限 责任 公 司 工 程 师
,
黑 龙江
一
咄
。
0
R朋
一
咄
,
盟
∞6
一
0
b
●
0 0
戈。
∞ 6
t
竹
竺 1 .
∞ 6
x
卫
三相异步电动机的建模与仿真
运动控制论文课题:异步电动机数学模型和电压空间矢量PWM控制技术研究姓名:xxxxxxxxx专业:电气工程及自动化班级:电097学号:0912002167日期:2013年3月30日摘要由于直流调速的局限性和交流调速的优越性,以及计算机技术和电力电子器件的不断发展,交流异步电动机变频调速技术正在快速发展之中。
目前广泛研究应用的交流异步电动机调速技术有恒压频比控制方式,矢量控制,直接转矩控制等。
本论文中所讨论的异步电动机调速技术叫做空间矢量脉宽调制方法(SVPWM)。
相对于直接转矩控制,它有可连续控制,调速范围宽等显著优点。
本文首先对交流异步电动机的数学模型的建立进行了详细的分析和阐述,通过对交流异步电动机的动态电磁关系的分析以及坐标变换原理概念的介绍,逐步引出了异步电动机的数学模型和在不同坐标系上的数学模型表达方程式,指出了异步电动机的模型特点是一多变量、强藕合的非线性系统。
采用MATLAB /SIMULINK软件包,实现异步电动机动态数学模型的仿真。
仿真研究显示,该方法简洁、方便、实时交互性强,能充分融合到其它控制系统中,并具有良好地扩展性。
其次阐述了异步电动机电压空间矢量PWM控制技术的原理和矢量变换方法实现的步骤,据交流电机坐标变换及矢量控制理论提出了异步电机在任意同步旋转坐标系下仿真结构图的建模设想,得出了一种按转子定向磁场下的动态结构图,利用该结构图可以方便的构成电机的仿真模型,进行仿真计算。
然后运用MATLAB软件搭建模型进行仿真分析,结果表明电机有良好的稳、动态性能。
通过对仿真软件的应用也表明在进行复杂系统设计时运用仿真工具对设计进行仿真分析是行之有效的方法,可以提高系统设计效率,缩短系统设计时间,并能够较好的进行系统优化。
经试验表明,空间电压矢量调制的方法正确可行,可调高电压利用率和系统精度。
关键词:异步电动机;矢量控制;数学模型;仿真目录摘要 (2)第1章简介 (5)1.1 课题研究的意义 (5)1.2 交流调速的发展和现状 (5)1.3 本论文的主要工作 (6)第2章异步电动机的数学模型分析................................... 错误!未定义书签。
异步电动机动态模型的仿真研究
关键词 : 异步电动机
坐标
动态
仿真
标 系变换到二相静止 的 卢 、坐标 系 , 避开了求解 定、 转子 间的非线性 强耦合关 系 , 两者在求解 使
过 程 中没有 互感 的耦 合关系 。 三相/ 二相 的变换
矩 阵如下【 l J
Ab t a tTh y a csmu a i n mo e f s n h o s r c : ed n mi i l t d l y c r . o o a
定子 电压方程
在产生相同的旋转磁动势的基础上 , 建立三相 交
・8・ 2 0 年第 1 《 1 07 期 电机 技 术》
维普资讯
卿
5
理论与设计
标系 中定 、 转子磁链以及 电动机 电磁转矩等各有
(3)
+
R1 +
关仿真模型 。 21 定子 及转子磁链仿真模 型 . 由方程( ×4X 建立 电动机定 、 3 7) 转了磁链 的仿真模型 , 图1 示 。 如 所 该模 型的输 入参数 为
n usm o o s e t b ihe n t a e o a l b o t r wa s a ls d o he b s fM ta / S mu ikb h ttcc o dn t y tm t wop a e i l yt esai o r iaes se wiht h s s n
及高阶次 , 使得传统的分析方法很难应用于对异
步 电动机的精确分析 。 近代计算机仿真技术的发 展, 使这种精确分析成 为可能 , 为制 定更完善 并
[
[
p u]=C A H u ] o 32 B c s[ .
】 =C … 【 32 】
() 2
异步电动机数学模型仿真

异步电机动态数学模型仿真报告姓名: 石俊 学号: 1107040155 专业: 电气工程及其自动化1. 鼠笼异步电动机参数:额定功率P N =3kW ,额定电压U N =380V ,额定电流I N =6.9A ,额定转速n N =1400r/min ,额定频率f N =50Hz ,定子绕组Y 联结。
定子电阻R s =1.85Ω,转子电阻R r =2.658Ω,定子自感L s =0.294H ,转子自感L r =0.2898H ,定、转子互感L m =0.2838H ,转子参数已折合到定子侧,系统的转动惯量J=0.1284kgm 2。
2. 公式推导状态方程s r ω--i ψ为状态变量 状态变量: Tr d r q s d s q ii ωψψ⎡⎤=⎣⎦X (式1) 输入变量: 1Ts ds q L u u T ω⎡⎤=⎣⎦U输出变量: []Tr ωψ=Y (式2)()1r q s qs s q mi L i L ψ=-(式3)rq i =()1sq s sq mL i L ψ-e T =()p sd sds sd sqsd sqS sd sq n i L i i i L i i ψψ--+(式4)=()p sq sdsd sq n i i ψψ-rdψ=r s r sd sd m m L L Li L L σψ-+ (式5)rq ψ=r s r sq sq m mL L Li L L σψ-+状态方程: d dt ω=()2pp sq sdsd sq L n n i i T ψψ--JJ(式6)sdd dt ψ=1S sd sq sd R i u ωψ-++ sdd dtψ=1S sq sd sq R i u ωψ--+sd di dt =()111s r r s sdsd sq sd sq r rs s r sR L R L u i i L T L L L L ψωψωωσσσσ++-+-+sqdi dt=()111sq s r r s sq sd sq sd r r s s r su R L R L i i L T L L L L ψωψωωσσσσ++-+-+输出方程: Y=Tω⎡⎣ (式7) 3.仿真模型建立图1整体模型图2 3/2变换模型图3 AC 电机模型图4 2/3变换模型4.仿真波形及分析图5异步电动机空载启动和加载过程转速仿真图00.51 1.52x 10450100150200250300350异步电动机空载启动和加载过程转速仿真图图6电磁转矩仿真波形由图5和图6可知,电动机空载启动时,转速迅速上升并达到稳定值314/min ,电磁转矩在转速上升时作衰减震荡,最后稳定值为零。
异步电动机SIMULINK建模与仿真

5
结束语
通过 SIMULINK 仿真可 验证此模型 的正确性 , 对该模型内部稍加改动, 便可显示电机的其它多种
Modeling and Simulation of Asynchronous Motor Based on SIMULINK Gu shengjie
( School of Information & Elect riacl Engineering, Lanzhou Jiaotong University, Lanzhou 730000, China)
( 2) ( 3) ( 4)
上述电机模型不能直接用 SIMULINK 实现 , 下
1
异步电机的数学模型
根据文献[ 1] , 在电机的数学模型建立过程中 ,
需要将 A 、 B、 C 三相静止坐标系 ( 3 s) 转换到
2
- L m im Lr
( 5)
二相静止坐标系 ( 2 s) , 再转换到 以转子总磁链
图1
电机仿真结构图
图2
3 s/ 2r 变换环节
U/ I 变换环节的仿真模型可由以下变换获得 根据式 ( 1) 矩阵的第一行、 第二行及式 ( 3) 、 ( 4) 推导可得 :
L mp 2 - !1L #it1 Lr Lm 2 Ut 1 = R 1 i t 1 + L # p it1 + !1 + L #im1 Lr Um1 = R 1 im1 + L spim 1 +
图3
U/ l 变换环节
然后将图 1 封装成一个模块 , 即图 4 所示的电机仿真 模型 . 至此异步电机的仿真模型就已完成. 从图 4 看 出整个仿真模型被封装成一个由四个输入量、 三个 输出量的环节 . 在使用该模型时, 只需输入 R 1 , R 2 , L r , L s, L m 等参数 , 就可以进行仿真.
异步电动机的动态数学模型-完整版

瞬态过程分析需要考虑电动 机内部的电磁场变化、转子 动态响应以及机械系统动态
响应等因素。
瞬态过程分析有助于深入了解 异步电动机的运行机理,为优 化控制策略和提高电机性能提
供理论支持。
04
CATALOGUE
异步电动机的控制策略
直接转矩控制
总结词
直接转矩控制是一种先进的电机控制策 略,通过直接控制电机的转矩和磁通量 来实现高动态性能。
VS
详细描述
直接转矩控制通过实时监测电机的转矩和 磁通量,并采用合适的控制算法来调整电 机的输入电压或电流,以达到快速响应和 精确控制的目的。这种控制策略具有快速 动态响应、高精度和鲁棒性强的优点,广 泛应用于高性能电机驱动系统中。
矢量控制
总结词
矢量控制是一种基于磁场定向的控制策略,通过将电机的电 流和电压解耦成转矩和磁通量分量,实现电机的精确控制。
效率与能效
提高异步电动机的效率和能效是当前 面临的重要挑战,也是推动技术发展 的主要动力。
未来趋势与展望
智能化
随着物联网和人工智能技术的发展,异步电动机将更加智能化, 能够实现自适应控制和预测性维护。
高效化
未来异步电动机将更加高效,能够降低能源消耗和维护成本。
定制化
随着生产工艺和需求的多样化,异步电动机将更加定制化,能够 满足各种特定应用的需求。
THANKS
感谢观看
压缩机等。
能源领域
02
风力发电和太阳能发电等可再生能源系统中,异步电动机作为
发电机和驱动电机被广泛应用。
交通运输
03
异步电动机在轨道交通、电动汽车和船舶推进等领域有广泛应
用。
技术发展与挑战
技术进步
可靠性
第6讲 异步电动机的动态数学模型

LCc Lac
iiCa
Lba
Lbb
Lbc
ib
Lca Lcb Lcc ic
(6 - 4)
(6-3)
6×6电感矩阵,其中:LAA、LBB、LCC、Laa、Lbb、Lcc
是各自绕组的自感,其余各项则是绕组间的互感。
12
➢与电动机绕组交链的磁通有两类:
一类是穿过气隙的公共主磁通(互感磁通);另一类是 只与定子或转子的一相绕组交链而不穿过气隙的漏磁通。
定子三相之间的互感与主磁通对应:
LAB=LBC=LCA=LBA=LCB=LAC=Lss
≈L’mcos120º=KsL’m
(6-6)
转子三相之间的互感与主磁通对应:
Lab=Lbc=Lca=Lba=Lcb=Lac=Lrr
≈L’mcos120º=KrL’m
(6-7)
15
② 变化互感—定子某一相与转子任一相之间的互感,由 于它们位置是变化的,互感是角位移θr的函数——时变电 感,当定、转子两相绕组轴线重合时,两者之间的互感值 最大,就是每相的最大互感值L’m。 定子与转子之间的互感也与主磁通对应:
6
三相异步电机的等效物理模型如下: 定子A、B、C的轴线在空间上固定,以A轴为参考坐标轴; 转子a、b、c的轴线随转子旋转,转速为ωr; 电角度θr为空间角位移变量。
7
异步电动机的动态数学模型由电压方程、磁链方程、转 矩方程和运动方程组成。
一、电压方程
定子电压方程:
uA
uB
uC
iA Rs iB Rs iC Rs
Tls+1
Tms
n 1 Ce
4
✓同样的理论和方法用来分析与设计交流调速系统时,就不 那么方便了,因为交流电机的数学模型和直流电机模型相比 有着本质上的区别。
异步电动机的matlab建模与仿真

异步电动机的matlab / Simulink建模与仿真摘要本文通过结合Matlab / Simulink中的模块和s函数,建立了鼠笼式异步电动机的模型,并进行了分析。
通过改进定子电流和定子磁链的方程式增加了模型的准确性。
文中给出了增加负载时定子电流,磁链以及转子速度转矩的仿真结果。
仿真结果表明在αβ两相同步静止坐标系下的模型可以更准确的反映运行中电机的实际情况。
关键词:Matlab / Simulink 异步电动机状态方程1 前言随着电力电子技术与交流电动机的调速和控制理论的迅速发展,使得异步电动机越来越广泛地应用于各个领域的工业生产。
异步电动机的仿真运行状况和用计算机来解决异步电动机控制直接转矩和电机故障分析具有重要意义。
它能显示理论上的变化,当异步电动机正在运行时,提供了直接理论基础的电机直接转矩控制(DTC),并且准确的分析了电气故障。
在过去,通过研究的异步电动机的电机模型建立了三相静止不动的框架。
研究了电压、转矩方程在该模型的功能,同相轴之间的定子、转子的线圈的角度。
θ是时间函数、电压、转矩方程是时变方程这些变量都在这个运动模型中。
这使得很难建立在αβ两相异步电动机的固定框架相关的数学模型。
但是通过坐标变换,建立在αβ两相感应电动机模型框架可以使得固定电压、转矩方程,使数学模型变得简单。
在本篇论文中,我们建立的异步电机仿真模型在固定框架αβ两相同步旋转坐标系下,并给出了仿真结果,表明该模型更加准确地反映了运行中的电动机的实际情况。
2 异步电动机的数学模型2.1 三相-两相变换矩阵2.2电压方程矩阵作为转子感应电动机是短路鼠笼式, Urα , Urβ =0。
电压方程可以得到:78(2)根据方程(2)我们可以得出状态方程为:(3)这个方程和电流的定子磁链定向的关系是一样的。
(4)(5)根据公式(4)(5),我们有了异步电动机与定子磁链定向的状态方程和电流作为状态变量:(6)转矩方程是:(7)速度方程是:(8)3基于simulink的异步电动机模型它提供了一个异步电动机在电力系统仿真模块(SimPowerSystems 7.0版本)的MATLAB的仿真,使电力系统变得更方便。
两相异步电机的数学模型及动态特性仿真
两相 异 步 电机 的数 学 模 型及 动 态 特 性仿 真
汪 敏
(江汉 大学 数 学与计 算机科 学 学 院,武汉 430056)
摘 要 :通过 对 两相异 步 电机 绕 组结构 的分 析 ,在 理 想 化假 设 的情 况 下推 导 了两 相 电机 的 电磁 关 系,
建 立 了电机 在任 意速 旋转 坐标 系 dqn下 的通 用 数 学模 型 ,并 在 分析 电机 数 学模 型 的基 础 上 ,应 用
磁场 ,不 能使 鼠笼 式 转 子产 生启 动 转 矩.因此 一 般 利 用 电容启 动 的单 相 异步 电机 都设 置 了一 个 在 空 间上 与 主绕组 相差 9O。电角 度 的 副 绕组 ,利 用 交 流 电路 中 电容 的 电流 超 前 电 压 9O。相 角 这 一 原 理 产 生 旋 转 磁 场.单 相异 步 电机 的这种 结构导 致调 速控 制 方法 受 到 很大 的 限制 ,实 际控 制 中一般采 用较 为简 单 的调 压 或 调频 的方 式 ,其 转速 调节 密度 较低 ,导致 效 率低 、经 济 性 差 ;在实 行变 频 调 速 时 ,频 率变 化 将 导 致 电 机 内部 磁场 由圆形变 成 椭 圆 ,造成 转 子 转 矩 波 动 ,电机 运行 效率 降低 ,不能 满足 家 电和工业 用 电机不 断增 长 的性 能需求 .
搭 建模 块 法建 立 了 Matlab/Simulink软 件环境 下 两相 异 步 电机 的动 态模 型.并 以实 际应 用 中 的小
功 率 电机 为例 ,对 电机 运行 进行 了仿 真 分 析.对 其 启 动 后 突加 负载 及 带 负载 启 动 等 多种 瞬 态过 程
进 行 了仿真 计 算.仿真 结果 表 明应用 此数 学模 型对 电机 运 行 过 程进 行 仿 真 具 有 较 高 的精 度 、较 好
第3篇2异步电机数学模型
磁链方程和转矩方程为代数方程 电压方程和运动方程为微分方程
磁链方程
异步电动机每个绕组的磁链是它本身的自 感磁链和其它绕组对它的互感磁链之和
自感
或写成 定子各相自感
转子各相自感
互感
绕组之间的互感又分为两类 ①定子三相彼此之间和转子三相彼此之间
位置都是固定的,故互感为常值; ②定子任一相与转子任一相之间的相对位
置是变化的,互感是角位移的函数。
定子三相间或转子三相间互 感
三相绕组轴线彼此在空间的相位差
互感
定子三相间或转子三相间互感
定、转子绕组间的互感
由于相互间位置的变化可分别表示为
当定、转子两相绕组轴线重合时,两者之 间的互感值最大
图2-2 二极直流电动机的物理模型 F—励磁绕组 A—电枢绕组 C—补偿绕组
2.3.1 坐标变换的基本思 路
把F的轴线称作直轴或d轴,主磁通的方向就 是沿着d轴的;A和C的轴线则称为交轴或q 轴。
虽然电枢本身是旋转的,但由于换向器和电 刷的作用,闭合的电枢绕组分成两条支路。 电刷两侧每条支路中导线的电流方向总是相 同的。
图2-7 定子、转子坐标系到静止两相正交坐标系的变换
定子绕组和转子绕组的3/2变 换
电压方程
定子绕组和转子绕组的3/2变 换
磁链方程
转矩方程
定子绕组和转子绕组的3/2变 换
3/2变换将按三相绕组等效为互相垂直 的两相绕组,消除了定子三相绕组、转 子三相绕组间的相互耦合。
定子绕组与转子绕组间仍存在相对运动 ,因而定、转子绕组互感阵仍是非线性 的变参数阵。输出转矩仍是定、转子电 流及其定、转子夹角的函数。
6.5 异步电动机的动态数学模型和坐标变换
6.5 异步电动机的动态数学模型和坐标变换本节提要异步电动机动态数学模型的性质三相异步电动机的多变量非线性数学模型坐标变换和变换矩阵三相异步电动机在两相坐标系上的数学模型三相异步电动机在两相坐标系上的状态方程一、异步电动机动态数学模型的性质2. 交流电机数学模型的性质(1)异步电机变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(电流)和频率两种独立的输入变量。
在输出变量中,除转速外,磁通也得算一个独立的输出变量。
因为电机只有一个三相输入电源,磁通的建立和转速的变化是同时进行的,为了获得良好的动态性能,也希望对磁通施加某种控制,使它在动态过程中尽量保持恒定,才能产生较大的动态转矩。
多变量、强耦合的模型结构由于这些原因,异步电机是一个多变量(多输入多输出)系统,而电压(电流)、频率、磁通、转速之间又互相都有影响,所以是强耦合的多变量系统,可以先用图来定性地表示。
图6-43 异步电机的多变量、强耦合模型结构模型的非线性(2)在异步电机中,电流乘磁通产生转矩,转速乘磁通得到感应电动势,由于它们都是同时变化的,在数学模型中就含有两个变量的乘积项。
这样一来,即使不考虑磁饱和等因素,数学模型也是非线性的。
模型的高阶性(3)三相异步电机定子有三个绕组,转子也可等效为三个绕组,每个绕组产生磁通时都有自己的电磁惯性,再算上运动系统的机电惯性,和转速与转角的积分关系,即使不考虑变频装置的滞后因素,也是一个八阶系统。
总起来说,异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
二、三相异步电动机的多变量非线性数学模型假设条件:(1)忽略空间谐波,设三相绕组对称,在空间互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的;(3)忽略铁心损耗;(4)不考虑频率变化和温度变化对绕组电阻的影响。
1. 电压方程三相定子绕组的电压平衡方程为:电压方程(续)与此相应,三相转子绕组折算到定子侧后的电压方程为:电压方程的矩阵形式将电压方程写成矩阵形式,并以微分算子 p 代替微分符号 d /dt或写成(6-67b)2. 磁链方程每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和,因此,六个绕组的磁链可表达为:或写成(6-68b)电感矩阵式中,L 是6×6电感矩阵,其中对角线元素 LAA, LBB, LCC,Laa,Lbb,Lcc 是各有关绕组的自感,其余各项则是绕组间的互感。
MATLAB环境下的异步电动机的数学模型及仿真研究

标系 d 、q 系的变换矩阵为 :
id
cosφ si nφ iα
= Iq
- si nφ cosφ
Iβ
φ为旋转坐标系 d 轴与静止系α轴之间的夹 角。
3 异步电机的数学模型
根据交流电机理论 ,异步电机在旋转坐标系 ,
即 d 、q 坐标系下的数学模型可用下列方程来描述 :
电压方程为
u d1 = i d1 r1 + pΨd1 - ω1 Ψq1
由结构图清楚的看出整个电机由三个惯性环
节 、一个积分环节和四个乘法器构成 , 没有任何微
分环节 ,用模拟机或面向结构图的仿真软件可以方
便的构成仿真模型 , 进行仿真计算 。用该模型对电
机动 、静态过程进行仿真具有精度高 、稳定性好 、内
部状态变量的初值可以任意设定等优点 。
5 仿真模型应用
为验证以上仿真模型的正确性 ,选择一台 J041 - 4 型异步电机进行仿真计算 。该电机参数为 : P = 1. 7 KW , I n = 3. 86 A , Ten = 11. 35 N ·m , nn = 1430 r/ m i n , cosφ = 0. 82 ,η = 81. 5 % , r1 = 4. 1Ω, r2 = 2. 5Ω Lσ1 = 0. 035 H , Lσ2 = 0. 032 H , L m = 0.
模型结构简单 ,易仿真 ,动态性能和跟随性能好 ,精 度高 。可以在实际工程设计中应用 。
图 4 动态结构图
给电机施加 380V ,50 Hz 的三相额定电压 ,电 机空载起动 ,1. 5S 后根据动态结构图仿真计算出 起动过程中的转矩 、转速波形如图 5 所示 。显示电 机的稳态值为 1436r/ min ,电流为 3. 65A ,电磁转矩 为 11. 35N·m ,输出功率为 1. 71 KW ,输入功率因素 为 0. 812 ,效率为 87. 45 %。其中实际转速比额定 转速稍高是因为模型忽略了铁损和机械损耗等因 素的影响 。可以看出 ,仿真模型不仅结构简单 ,而 且 ,仿真输出结果已基本接近额定值 ,且动态性能 较好 。稳态下的仿真可以用于计算给定输入及负 载条件下的稳态值 ,分析研究电机的运行效率及功 率因素 。
异步电动机的动态数学模型-完整版

(参考书:电力牵引交流传动及其控制系统 第4章)
(电动机控制 第8章)
6-1 三相异步电动机的数学模型 6-2 常用的坐标系和坐标变换 6-3 三相异步电机的动态模型简化
1
研究背景: 当异步电动机用于机车牵引传动、轧钢机、数控机床、 机器人、载客电梯等高性能调速系统和伺服系统时,系 统需要较高甚至很高的动态性能,仅用基于稳态模型的 各种控制不能满足要求。 要实现高动态性能,必须首先研究异步电动机的动态 数学模型,高性能的传动控制,如矢量控制(磁场定向 控制)是以动态d-q模型为基础的。
Ψr a b c T
i r ia ib ic
T
Ψs A B C T
i s iA iB iC T
Lss——定子自感矩阵,常数矩阵 Lrr——转子自感矩阵,也为常数矩阵
Lsr——转子对定子的互感矩阵,为时变矩阵
Lrs——定子对转子的互感矩阵,也为时变矩阵
18
LAA L ss LBA LCA
LAa L sr LBa LCa
LAB LBB LCB
LAb LBb LCb
LAC LBC LCC
LAc LBc LCc
Laa L rr Lba Lca
=Lsrcos(θr+120º)=L’mcos(θr+120º )
LAc=LcA=LBa=LaB=LCb=LbC =Lsrcos(θr-120º)=L’mcos(θr-120º )
17
完整的磁链方程以矩阵形式可以表示为:
Ψ s Lss Ψ L r rs
式中:
Lsr ห้องสมุดไป่ตู้i s Lrr i r
异步电动机动态数学模型的建模与仿真 αβ讲解

《电力拖动与控制系统》课程设计说明书目录1异步电动机动态数学模型的性质 (1)2异步电动机的三相数学模型 (2)2.1假设条件与模型 (2)2.2异步电动机三相动态模型的数学表达式 (2)3 坐标变换 ..................................................................53.1坐标变换的基本思路 (5)3.2 三相-两相变换(3/2变换) (5)?i?为状态变量的状态方程 ............................... -7 4 αβ坐标系上以 -s s5模块实现 ..................................................................85.1 3/2 transform 模块 (8)5.2 2/3 transform 模块 (8)5.4整体模块 (10)5.5 仿真参数设置 (11)6 仿真结果 (12)总结 .................................................................. .. (14)参考文献 ...................................................................15《电力拖动与控制系统》课程设计说明书摘要异步电动机又称感应电动机,是由气隙旋转磁场与转子绕组感应电流相互作用产生电磁转矩,从而实现机电能量转换为机械能量的一种交流电机。
异步电动机按照转子结构分为两种形式:有鼠笼式、绕线式异步电动机。
它具有非线性、强耦合、多变量的性质,要获得高动态调速性能,必须从动态模型出发,分析异步电动机的转矩和磁链控制规律,研究高性能异步电动机的调速方案。
本课程设计是基于Matlab的按定子磁链定向的异步电动机控制仿真,通过模型的搭建,使得异步电动机能够以图形数据的方式进行仿真模拟将要实施的定子磁链设计,查看仿真后的各种波形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1 设计意义及要求 (3)1.1设计意义 (3)1.2设计要求 (3)2 异步电动机动态数学模型 (4)2. 1 异步电动机动态数学模型的性质 (4)2. 2 异步电动机的三相数学模型 (5)2.3坐标变换 (7)2. 3.1坐标变换的基本思路 (7)2. 3.2三相 - 两相变换( 3 / 2 变换) (7)2. 3.3静止两相 - 旋转正交变换( 2 s / 2 r 变换) ......................................2.4状态方程 (10)3 模型建立 (12)3. 1 ACMo t o r 模块 (12)3.2坐标变换模块 (13)3. 2.1 3/ 2 t r a n s f o r m 模块 (13)3. 2.22s/2rtransform 模块 (13)3. 2.32r / 2s t r an s f or m 模块 (14)3. 2.4 2/ 3 t r a n s f o r m 模块 (15)3. 2.5 3/ 2 r t r a ns f o r m 模块 (16)3.3仿真原理图 (17)4 仿真结果及分析 (20)5 结论参考文献.....................................................摘要对一个物理对象的数学模型,在不改变控制对象物理特性的前提下采用一定的变换手段,可以获得相对简单的数学描述,以简化对控制对象的控制。
对异步电机的数学分析也不例外,在分析异步电机的数学模型时主要用到的是坐标变换。
当异步电动机用于机车牵引传动、轧钢机、数控机床、机器人、载客电梯等高性能调速系统和伺服系统时,系统需要较高甚至很高的动态性能,仅用基于稳态模型的各种控制不能满足要求。
要实现高动态性能,必须首先研究异步电动机的动态数学模型,高性能的传动控制,如矢量控制(磁场定向控制)是以动态 d-q 模型为基础的。
关键字:异步电动机数学模型坐标变化d-q 坐标系异步电动机动态数学模型的建模与仿真1设计意义及要求1.1 设计意义学会分析异步电动机的物理模型,建立异步电动机的动态数学模型,并且推导出两相静止坐标系上的状态方程和转矩方程,利用 Matlab/Simulink 仿真工具把数学方程转变为模型。
通过数学模型观察异步电动机在启动和加载的情况下,转速、电磁转矩、定子磁链和定子电流的变化曲线,同时分析各个变量之间的变化关系。
进一步了解异步电动机的运行特性。
1.2 设计要求初始条件:1.技术数据:异步电动机额定数据:P N=3kw,U N=380V,I N=6.9 A,n N=1450r/min,f N=50Hz;R s=1.85 Ω,R r =2.658Ω,L s=0.2941H,L r =0.2898H,L m=0.2838H;J=0.1284Nm.s2,n p=22.技术要求:在以 - i s - s为状态变量的 dq 坐标系上建模要求完成的主要任务 :1.设计内容:(1)根据坐标变换的原理,完成 dq 坐标系上的异步电动机动态数学模型(2)完成以 - i s - s为状态变量的 dq 坐标系动态结构图(3)根据动态结构图,完成异步电动机模型仿真并分析电动机起动和加载的过渡过程(4)整理设计数据资料,完成课程设计总结,撰写设计说明书2异步电动机动态数学模型2.1 异步电动机动态数学模型的性质他励式直流电动机的励磁绕组和电枢绕组相互独立,励磁电流和电枢电流单独可控,若忽略队励磁的电枢反应或通过补偿绕组抵消之,则励磁和电枢绕组各自产生的磁动势在空间相差π/2 ,无交叉耦合。
气隙磁通由励磁绕组单独产生,而电磁转矩正比于磁通与电枢电流的乘积。
不考虑弱磁调速时,可以在电枢合上电源以前建立磁通,并保持励磁电流恒定,这样就可以认为磁通不参与系统的动态过程。
因此,可以只通过电枢电流来控制电磁转矩。
在上述假定条件下,直流电动机的动态数学模型只有一个输入变量——电枢电压,和一个输出变量——转速,可以用单变量的线性系统来描述,完全可以应用线性控制理论和工程设计方法进行分析与设计。
而交流电动机的数学模型则不同,不能简单地采用同样的方法来分析与设计交流调速系统,这是由于以下几个原因。
(1)异步电动机变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(或电流)和频率两种独立的输入变量。
在输出变量中,除转速外,磁通也是一个输出变量。
(2)异步电动机无法单独对磁通进行控制,电流乘磁通产生转矩,转速乘磁通产生感应电动势,在数学模型中含有两个变量的乘积项。
(3)三相异步电动机三相绕组存在交叉耦合,每个绕组都有各自的电磁惯性,再考虑运动系统的机电惯性,转速与转角的积分关系等,动态模型是一个高阶系统。
因此,异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
2.2 异步电动机的三相数学模型作如下的假设:(1)忽略空间谐波,三相绕组对称,产生的磁动势沿气隙按正弦规律分布。
(2)忽略磁路饱和,各绕组的自感和互感都是恒定的。
(3)忽略铁心损耗。
(4)不考虑频率变化和温度变化对绕组电阻的影响。
无论异步电动机转子是绕线型还是笼型的,都可以等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数相等。
— Y 异步电动机三相绕组可以是Y 连接,也可以是连接。
若三相绕组为连接,可先用变换,等效为 Y 连接。
然后,按Y 连接进行分析和设计。
这样,实际电机绕组就等效成图2-1 所示的定子三相绕组轴线A、B、C在空间固定,转子绕组轴线a、 b、 c 随转子旋转的三相异步电机物理模型。
图2-1三相异步电动机的物理模型异步电动机的动态模型由磁链方程、电压方程、转矩方程和运动方程组成。
其中,磁链方程和转矩方程为代数方程,电压方程和运动方程为微分方程。
(1)磁链方程异步电动机每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和,因此,六个绕组的磁链可用下式表示:式中, L 是 6×6 电感矩阵,其中对角线元素L AA、 L BB、 L CC、 L aa、 L bb、 L cc是各有关绕组的自感,其余各项则是绕组间的互感。
(2)电压方程三相定子的电压方程可表示为:方程中, U A、 U B、 U C为定子三相电压; i A、 i B、 i C为定子三相电流; A 、 B 、 C 为定子三相绕组磁链;r1为定子各相绕组电阻。
三相转子绕组折算到定子侧后的电压方程为:(3)电磁转矩方程式中, n p 为电机极对数, 为角位移。
(4) 运动方程式中, T e 为电磁转矩; T l 为负载转矩; 为电机机械角速度; J 为转动惯量。
2.3 坐标变换2.3.1 坐标变换的基本思路异步电动机三相原始动态模型相当复杂,简化的基本方法就是坐标变换。
异步电动机数学模型之所以复杂,关键是因为有一个复杂的电感矩阵和转矩方程,它们体现了异步电动机的电磁耦合和能量转换的复杂关系。
要简化数学模型,须从电磁耦合关系入手。
2.3.2 三相 - 两相变换( 3/2 变换)三相绕组 A 、B 、C 和两相绕组之间的变换,称作三相坐标系和两相正交坐标系间的变换,简称 3/2变换。
图2-2 三相坐标系和两相正交坐标系中的磁动势矢量ABC 和两个坐标系中的磁动势矢量,将两个坐标系原点重合,并使A 轴和 轴重合。
按照磁动势相等的等效原则,三相合成磁动势与两相合成磁动势相等,故两套绕组磁动势在 αβ轴上的投影应相等,因此写成矩阵形式按照变换前后总功率不变,匝数比为i11 1 i A N 32 2i B iN 23 3i C则三相坐标系变换到两相正交坐标系的变换矩0阵22三相 -两相变换( 3/2变换)两相正交坐标系变换到三相坐标系(简称2/3变换)的变换矩阵2.3.3 静止两相 - 旋转正交变换( 2s/2r 变换)从静止两相正交坐标系 αβ到旋转正交坐标系 dq 的变换,称作静止两相 -旋转正交变换,简称 2s/2r 变换,其中 s 表示静止, r 表示旋转,变换的原则同样是产生的磁动势相等。
图 2-3 静止两相正交坐标系和旋转正交坐标系中的磁动势矢量旋转正交变换阵静止两相正交坐标系到旋转正交坐标系的变换阵旋转正交坐标系到静止两相正交坐标系的变换阵定子旋转变换阵转子旋转变换阵电压方程磁链方程转矩方程旋转变换是用旋转的绕组代替原来静止的定子绕组,并使等效的转子绕组与等效的定子绕组重合,且保持严格同步,等效后定、转子绕组间不存在相对运动。
旋转正交坐标系中的磁链方程和转矩方程与静止两相正交坐标系中相同,仅下标发生变化。
从表面上看来,旋转正交坐标系中的数学模型还不如静止两相正交坐标系的简单,实际上旋转正交坐标系的优点在于增加了一个输入量ω 1,提高了系统控制的自由度。
2.4 状态方程旋转正交坐标系上的异步电动机具有 4阶电压方程和 1阶运动方程,因此须选取 5个状态变量。
可选的状态变量共有 9个,这 9个变量分为 5组:①转速;②定子电流;③转子电流;④定子磁链;⑤转子磁链。
转速作为输出变量必须选取。
其余的4组变量可以任意选取两组,定子电流可以直接检测,应当选为状态变量。
剩下的3组均不可直接检测或检测十分困难,考虑到磁链对电动机的运行很重要,可以选定子磁链或转子磁链。
状态方程为状态i 变ψ量。
ss状态变量XTsd sqisdi sqT输入变量 Uu sdusq1T L输出变量 YTs状态方程d n p 2isdn pdt (i sqsdsq)TL转矩方程JJdsd R s isd1 sq T u sd输出方程dt2 2 Ysdsqdsq R s i sqsd usq 转子电磁时间常数1 dt电动机漏磁系数2R L R Ldisd11 L ms1s rri sddtL Tsd L Lsq L Ls L rr根据以上公式绘制动态结sr 构图如图:ssdi sq11R s L r R r L s图 2-4为状态变量在dq 坐标系中动态结构图isqdti s sqψsL ssdL s L rL s T r((usd1)i sqL susq1)i sdL s3 模型建立3.1ACMotor 模块根据图 2-4 的动态结构图,用 MATLAB/SIMULINK 基本模块建立在 dq 坐标系下异步电动机仿真模型 ACMotor 模块。
ACMotor模块图如图 3-1 。
根据图 2-4 计算参数为:L2ρ= 1 -Lr ×L m = 0.055sR s = 1.85R s L r + R r L s 1.85 ×0.2898 + 2.658 ×0.2941== 4.5474 L r0.2898ρL s= 0.055×0.2941 = 0.01618n p×L2× 0.2838== 1.9586 ωL r0.2898ω1= 2πf n= 100 π搭建 ACmoter模块如下图所示:图3-1ACmotor 模块3.2 坐标变换模块3.2.13/2transform模块根据静止两相正交坐标系到旋转正交坐标系的变换阵则有 Usa=0.8165*Ua-0.4082*Ub-0.4082*Uc ,Usb=0.7071*Ub-0.7071*Uc其中 Ua,Ub, Uc 为三相坐标系下的输入电压,Usa 和 Usb 为静止两相正交坐标下的电压。