郑州大学机械设计基础第三版课后作业答案
机械设计基础课后答案-第三版-刘江南郭克希编

机械设计基础课后答案-第三版-刘江南郭克希编案场各岗位服务流程销售大厅服务岗:1、销售大厅服务岗岗位职责:1)为来访客户提供全程的休息区域及饮品;2)保持销售区域台面整洁;3)及时补足销售大厅物资,如糖果或杂志等;4)收集客户意见、建议及现场问题点;2、销售大厅服务岗工作及服务流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
班中工作程序服务流程行为规范迎接指引递阅资料上饮品(糕点)添加茶水工作要求1)眼神关注客人,当客人距3米距离时,应主动跨出自己的位置迎宾,然后侯客迎询问客户送客户注意事项15度鞠躬微笑问候:“您好!欢迎光临!”2)在客人前方1-2米距离领位,指引请客人向休息区,在客人入座后问客人对座位是否满意:“您好!请问坐这儿可以吗?”得到同意后为客人拉椅入座“好的,请入座!”3)若客人无置业顾问陪同,可询问:请问您有专属的置业顾问吗?,为客人取阅项目资料,并礼貌的告知请客人稍等,置业顾问会很快过来介绍,同时请置业顾问关注该客人;4)问候的起始语应为“先生-小姐-女士早上好,这里是XX销售中心,这边请”5)问候时间段为8:30-11:30 早上好11:30-14:30 中午好 14:30-18:00下午好6)关注客人物品,如物品较多,则主动询问是否需要帮助(如拾到物品须两名人员在场方能打开,提示客人注意贵重物品);7)在满座位的情况下,须先向客人致歉,在请其到沙盘区进行观摩稍作等待;阶段工作及服务流程班中工作程序工作要求注意事项饮料(糕点服务)1)在所有饮料(糕点)服务中必须使用托盘;2)所有饮料服务均已“对不起,打扰一下,请问您需要什么饮品”为起始;3)服务方向:从客人的右面服务;4)当客人的饮料杯中只剩三分之一时,必须询问客人是否需要再添一杯,在二次服务中特别注意瓶口绝对不可以与客人使用的杯子接触;5)在客人再次需要饮料时必须更换杯子;下班程序1)检查使用的工具及销售案场物资情况,异常情况及时记录并报告上级领导;2)填写物资领用申请表并整理客户意见;3)参加班后总结会;4)积极配合销售人员的接待工作,如果下班时间已经到,必须待客人离开后下班;1.3.3.3吧台服务岗1.3.3.3.1吧台服务岗岗位职责1)为来访的客人提供全程的休息及饮品服务;2)保持吧台区域的整洁;3)饮品使用的器皿必须消毒;4)及时补充吧台物资;5)收集客户意见、建议及问题点;1.3.3.3.2吧台服务岗工作及流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
机械设计基础课后习题答案
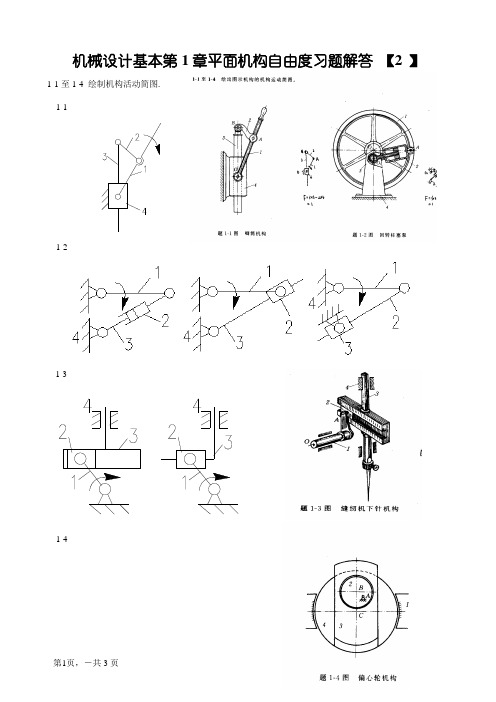
机械设计基本第1章平面机构自由度习题解答【2 】1-1至1-4 绘制机构活动简图.
1-1
1-2
1-3
1-4
1-5至1-12 盘算机构自由度
1-5 有一处局部自由度(滚子),有一处虚束缚(槽的一侧),无复合搭钮
n=6 PL=8 PH=1 F=3×6-2×8-1=1
1-6 有一处局部自由度(滚子),无复合搭钮.虚束缚
n=8 PL=11 PH=1 F=3×8-2×11-1=1
1-7 无复合搭钮.局部自由度.虚束缚
n=8 PL=11 PH=0 F=3×8-2×11-0=2
1-8 无复合搭钮.局部自由度.虚束缚
n=6 PL=8 PH=1 F=3×6-2×8-1=1
1-9 有两处虚束缚(凸轮.滚子
处槽的一侧),局部自由度1处,
无复合搭钮
n=4 PL=4 PH=2
F=3×4-2×4-2=2
1-10 复合搭钮.局部自由度.虚
束缚各有一处
虚束缚
局部自由度 局部自由度
凸轮.齿轮为统一构件时,
n=9 PL=12 PH=2
F=3×9-2×12-2=1
凸轮.齿轮为不同构件时
n=10 PL=13 PH=2 F=3×10-2×13-2=2 图上应在凸轮上加一个原动件.
1-11 复合搭钮一处,无局部自由度.虚束缚
n=4 PL=4 PH=2 F=3×4-2×4-2=2
1-12 复合搭钮.局部自由度.虚束缚各有一处
n=8 PL=11 PH=1 F=3×8-2×11-1=1。
机械设计基础课后习题与答案
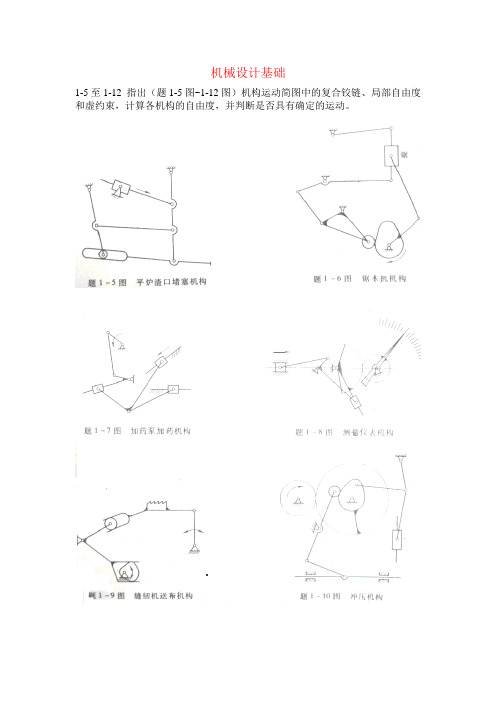
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础课后习题答案全
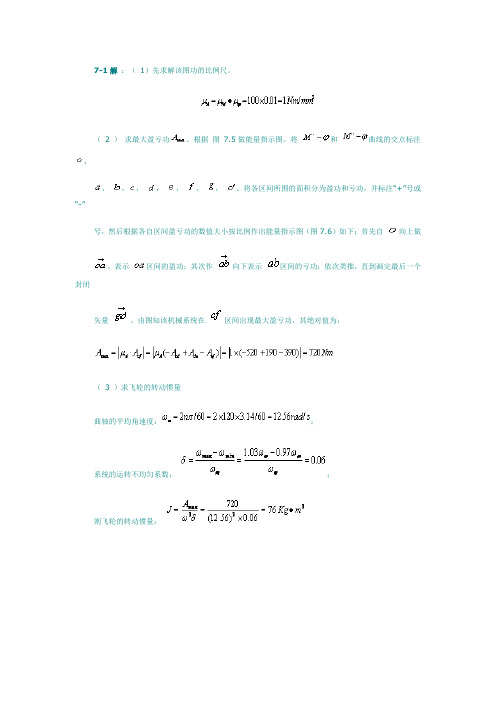
7-1解:(1)先求解该图功的比例尺。
(2 )求最大盈亏功。
根据图7.5做能量指示图。
将和曲线的交点标注,,,,,,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.6)如下:首先自向上做,表示区间的盈功;其次作向下表示区间的亏功;依次类推,直到画完最后一个封闭矢量。
由图知该机械系统在区间出现最大盈亏功,其绝对值为:(3 )求飞轮的转动惯量曲轴的平均角速度:;系统的运转不均匀系数:;则飞轮的转动惯量:图7.5图7.67-2图7.7 图7.8解:(1)驱动力矩。
因为给定为常数,因此为一水平直线。
在一个运动循环中,驱动力矩所作的功为,它相当于一个运动循环所作的功,即:因此求得:(2)求最大盈亏功。
根据图7.7做能量指示图。
将和曲线的交点标注,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.8)如下:首先自向上做,表示区间的盈功;其次作向下表示区间的亏功;然后作向上表示区间的盈功,至此应形成一个封闭区间。
由图知该机械系统在区间出现最大盈亏功。
欲求,先求图7.7中的长度。
如图将图中线1和线2延长交于点,那么在中,相当于该三角形的中位线,可知。
又在中,,因此有:,则根据所求数据作出能量指示图,见图7.8,可知最大盈亏功出现在段,则。
(3)求飞轮的转动惯量和质量。
7-3解:原来安装飞轮的轴的转速为,现在电动机的转速为,则若将飞轮安装在电动机轴上,飞轮的转动惯量为:7-4解:(1)求安装在主轴上飞轮的转动惯量。
先求最大盈亏功。
因为是最大动能与最小动能之差,依题意,在通过轧辊前系统动能达到最大,通过轧辊后系统动能达到最小,因此:则飞轮的转动惯量:(2)求飞轮的最大转速和最小转速。
(3)因为一个周期内输入功和和输出功相等,设一个周期时间为,则:,因此有:。
7-5 解:图7.9一个周期驱动力矩所作的功为:一个周期阻力矩所作的功为:又时段内驱动力矩所做的功为:因此最大盈亏功为:机组的平均角速度为:机组运转不均匀系数为:故飞轮的转动惯量为:7-6答:本书介绍的飞轮设计方法,没有考虑飞轮以外其他构件动能的变化,而实际上其他构件都有质量,它们的速度和动能也在不断变化,因而是近似的。
机械设计基础(陈立德第三版)课后答案(1-18章全)
目录第1章机械设计概述 (1)第2章摩擦、磨损及润滑概述 (3)第3章平面机构的结构分析 (12)第4章平面连杆机构 (16)第5章凸轮机构 (36)第6章间歇运动机构 (46)第7章螺纹连接与螺旋传动 (48)第8章带传动 (60)第9章链传动 (73)第10章齿轮传动 (80)第11章蜗杆传动 (112)第12章齿轮系 (124)第13章机械传动设计 (131)第14章轴和轴毂连接 (133)第15章轴承 (138)第16章其他常用零、部件 (152)第17章机械的平衡与调速 (156)第18章机械设计CAD简介 (163)第1章机械设计概述1.1机械设计过程通常分为哪几个阶段?各阶段的主要内容是什么?答:机械设计过程通常可分为以下几个阶段:1.产品规划主要工作是提出设计任务和明确设计要求。
2.方案设计在满足设计任务书中设计具体要求的前提下,由设计人员构思出多种可行方案并进行分析比较,从中优选出一种功能满足要求、工作性能可靠、结构设计可靠、结构设计可行、成本低廉的方案。
3.技术设计完成总体设计、部件设计、零件设计等。
4.制造及试验制造出样机、试用、修改、鉴定。
1.2常见的失效形式有哪几种?答:断裂,过量变形,表面失效,破坏正常工作条件引起的失效等几种。
1.3什么叫工作能力?计算准则是如何得出的?答:工作能力为指零件在一定的工作条件下抵抗可能出现的失效的能力。
对于载荷而言称为承载能力。
根据不同的失效原因建立起来的工作能力判定条件。
1.4标准化的重要意义是什么?答:标准化的重要意义可使零件、部件的种类减少,简化生产管理过程,降低成本,保证产品的质量,缩短生产周期。
第2章摩擦、磨损及润滑概述2.1按摩擦副表面间的润滑状态,摩擦可分为哪几类?各有何特点?答:摩擦副可分为四类:干摩擦、液体摩擦、边界摩擦和混合摩擦。
干摩擦的特点是两物体间无任何润滑剂和保护膜,摩擦系数及摩擦阻力最大,磨损最严重,在接触区内出现了粘着和梨刨现象。
机械设计基础课后习题答案--【完整版】

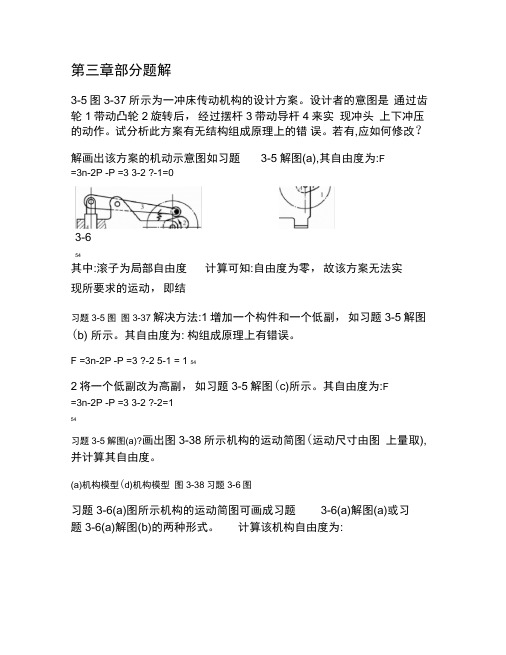
第三章部分题解参考3-5 图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?习题3-5图习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解 画出该方案的机动示意图如习题3-5解图(a),其自由度为:14233 2345=-⨯-⨯=--=P P n F其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自由度为:115243 2345=-⨯-⨯=--=P P n F②将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:123233 2345=-⨯-⨯=--=P P n F3-6 画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
习题3-6(a)图 习题3-6(d)图解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(a)解图(a)习题3-6(a)解图(b)解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(d)解图(a) 习题3-6(d)解图(b)3-7 计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。
解(a)1010*******=-⨯-⨯=--=P P n FA 、B 、C 、D 为复合铰链原动件数目应为1说明:该机构为精确直线机构。
当满足BE =BC =CD =DE ,AB =AD ,AF =CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF解(b)1072532345=-⨯-⨯=--=P P n FB 为复合铰链,移动副E 、F 中有一个是虚约束 原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。
机械制造技术基础(第三版)课后习题答案——第三版

第二章2-1.金属切削过程有何特征?用什么参数来表示?答:2-2.切削过程的三个变形区各有什么特点?它们之间有什么关联?答:第一变形区:变形量最大。
第二变形区:切屑形成后与前刀面之间存在压力,所以沿前刀面流出时有很大摩擦,所以切屑底层又一次塑性变形。
第三变形区:已加工表面与后刀面的接触区域。
这三个变形区汇集在切削刃附近,应力比较集中,而且复杂,金属的被切削层在此处于工件基体分离,变成切屑,一小部分留在加工表面上。
2-3.分析积屑瘤产生的原因及其对加工的影响,生产中最有效地控制它的手段是什么?答:在中低速切削塑性金属材料时,刀—屑接触表面由于强烈的挤压和摩擦而成为新鲜表面,两接触表面的金属原子产生强大的吸引力,使少量切屑金属粘结在前刀面上,产生了冷焊,并加工硬化,形成瘤核。
瘤核逐渐长大成为积屑瘤,且周期性地成长与脱落。
积屑瘤粘结在前刀面上,减少了刀具的磨损;积屑瘤使刀具的实际工作前角大,有利于减小切削力;积屑瘤伸出刀刃之外,使切削厚度增加,降低了工件的加工精度;积屑瘤使工件已加工表面变得较为粗糙。
由此可见:积屑瘤对粗加工有利,生产中应加以利用;而对精加工不利,应以避免。
消除措施:采用高速切削或低速切削,避免中低速切削;增大刀具前角,降低切削力;采用切削液。
2-4切屑与前刀面之间的摩擦与一般刚体之间的滑动摩擦有无区别?若有区别,而这何处不同?答:切屑形成后与前刀面之间存在压力,所以流出时有很大的摩擦,因为使切屑底层又一次产生塑性变形,而且切屑与前刀面之间接触的是新鲜表面,化学性质很活跃。
而刚体之间的滑动摩擦只是接触表面之间的摩擦,并没有塑性变形和化学反应2-5车刀的角度是如何定义的?标注角度与工作角度有何不同?答:分别是前角、后角、主偏角、副偏角、刃倾角(P17)。
机械设计基础课后答案全
第三章部分题解3-5图3-37所示为一冲床传动机构的设计方案。
设计者的意图是 通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实 现冲头 上下冲压的动作。
试分析此方案有无结构组成原理上的错 误。
若有,应如何修改? 解画出该方案的机动示意图如习题3-5解图(a),其自由度为:F=3n-2P -P =3 3-2 ?-1=0 其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结 习题3-5图 图3-37解决方法:1增加一个构件和一个低副,如习题3-5解图(b) 所示。
其自由度为: 构组成原理上有错误。
F =3n-2P -P =3 ?-2 5-1 = 1 542将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:F =3n-2P -P =3 3-2 ?-2=154习题3-5解图(a)?画出图3-38所示机构的运动简图(运动尺寸由图 上量取),并计算其自由度。
(a)机构模型(d)机构模型 图3-38习题3-6图习题3-6(a)图所示机构的运动简图可画成习题 3-6(a)解图(a)或习 题3-6(a)解图(b)的两种形式。
计算该机构自由度为:3-654F =3n-2P -P =3 ?-2 4-0=1 54习题3-6(a)解图(a)习题3-6(a)解图(b)?习题3-6(d)图所示机构的运动简 图可画成习题 3-6(d)解图(a)、习题3-6(d)解图(b)、习题3-6(d)解图 (c)解(d) 等多种形式。
-1-3-7 解(a)解(b)解(c) 6 习题3-5解图(b)习题3-5解图(c) 解⑻科=O.QOIm min。
机械设计基础课后习题答案

机械设计基础课后习题答案第三章部分题解参考3-5 图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?习题3-5图习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解画出该方案的机动示意图如习题3-5解图(a),其自度为:F3n2P5P4 33241 0其中:滚子为局部自度计算可知:自度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自度为:F3n2P5P4 34251 1②将一个低副改为高副,如习题3-5解图(c)所示。
其自度为:F3n2P5P4 33232 13-6 画出图3-38所示机构的运动简图,并计算其自度。
习题3-6(a)图习题3-6(d)图解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
自度计算:- 1 -一座城乱我心提供F3n2P5P4332401习题3-6(a)解图(a)习题3-6(a)解图(b)解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。
自度计算:F3n2P5P4332401习题3-6(d)解图(a) 习题3-6(d)解图(b)3-7 计算图3-39所示机构的自度,并说明各机构应有的原动件数目。
解(a) F3n2P5P43721001A、B、C、D为复合铰链原动件数目应为1- 2 -一座城乱我心提供说明:该机构为精确直线机构。
当满足BE=BC=CD=DE,AB=AD,AF=CF条件时,E点轨迹是精确直线,其轨迹垂直于机架连心线AF 解(b) F3n2P5P4352701B为复合铰链,移动副E、F中有一个是虚约束原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。
机械设计基础第三版课后习题答案
机械设计基础第三版课后习题答案
《机械设计基础第三版课后习题答案》
机械设计是机械工程的基础,是机械工程师必须掌握的重要知识之一。
而《机
械设计基础第三版》是一本经典的教材,其中的课后习题更是对学生们进行知
识巩固和实践能力培养的重要手段。
下面我们就来看一下这本教材的课后习题
答案。
第一章:机械设计基础
1.1 什么是机械设计?
答案:机械设计是指按照一定的要求和条件,通过对机械结构、零部件和工艺
过程的设计,使得机械产品能够满足使用要求,并具有良好的经济性和可靠性。
1.2 机械设计的基本原则有哪些?
答案:机械设计的基本原则包括:合理性、经济性、可靠性、安全性和先进性。
第二章:材料力学基础
2.1 什么是材料的弹性模量?
答案:材料的弹性模量是材料在弹性阶段的应力和应变之比,通常用E表示。
2.2 什么是材料的屈服强度?
答案:材料的屈服强度是材料在拉伸试验中,开始出现塑性变形的应力值。
第三章:零件的连接
3.1 什么是螺纹连接?
答案:螺纹连接是利用螺纹副的螺旋运动和摩擦力,将两个零件连接在一起的
一种连接方式。
3.2 螺纹连接的优点有哪些?
答案:螺纹连接的优点包括:拆卸方便、连接牢固、适用范围广等。
通过学习这些课后习题答案,我们不仅可以巩固所学的知识,还可以加深对机械设计的理解和掌握。
希望大家能够认真对待每一道习题,不断提高自己的机械设计能力。
机械设计基础课后习题与答案
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
机械设计基础课后习题答案

课题:绪论目的任务:了解本课程研究对象、内容、增强感性认识重点:本课程研究对象、内容难点:机器与机构、构件与零件的区别教学方法:利用虚实陈列室、工程案例等多种教学软件,展示本门课研究的对象、内容。
绪论0.1 引言0.2 机械概述0.2.1 机器和机构在人们的生产和生活中广泛使用着各种机器。
机器的种类繁多,结构形式和用途也各不相同,但总的来说,机器有三个共同的特征:(1)都是人为的各种实物的组合;(2)组成机器的各种实物间具有确定的相对运动;(3)可代替或减轻人的劳动,完成有用的机械功或转换机械能。
点击下图可拆装运动演示运动演示动画演示动画演示机构是具有确定相对运动的各种实物的组合,它只符合机器的前两个特征。
(1)(2)0.2.2 零件和构件构件:运动的单元;拆装拆装零件:制造的单元。
0.2.3 机器的组成1 原动部分2 工作部分3 传动部分4 控制部分0.3 《机械设计基础》课程的性质、内容、任务和学习方法特点0.3.1《机械设计基础》课程的性质与研究对象《机械设计基础》是一门综合性技术基础课,其研究对象如下:第一篇构件静力分析研究对象为刚体或刚体系统,即忽略构件的变形,将构件视为在力作用下大小和形状不变的物体。
第二篇构件承载能力计算研究对象为变形固体。
具体地讲,是经过力学模型化处理的杆状构件。
第三篇常用机构研究对象为常见于各种机器中的机构。
如平面连杆机构,凸轮机构等。
第四篇常用机械传动研究对象为常见于各种机器中的机械传动。
如齿轮传动,带传动等。
第五篇通用机械零部件研究对象是在各种机器中普遍使用的零部件。
如轴、轴承、联轴器及离合器等。
0.3.2《机械设计基础》课程的内容第一篇构件静力分析 (理论力学)主要研究刚体在力作用下的平衡问题,即根据力系平衡条件分析平衡刚体的受力情况,确定各未知力的大小和方向,是构件承载能力计算的基础。
第二篇构件承载能力计算(材料力学)主要研究变形固体的强度和刚度问题,为机械零件确定合理的材料、截面形状和尺寸,为达到既安全又经济的目的提供理论基础。
郑州大学机械设计基础第三版课后作业答案

❖1-3 平面机构具有确定的运动条件是什么?答:必须使原动件数目等于机构的自由度数。
❖1-5 试确定下列平面机构的自由度(图中绘有箭头的活动构件为原动件):a)推土机的推土机构;d)渣口堵塞机构;f)筛料机机构。
❖解:a)推土机的推土机构活动构件数n=5,低副PL=7(6个转动副,一个移动副)高副PH=0。
F=3×5-2×7-0=1 等于原动件数∴有确定运动。
❖d) 渣口堵塞机构由分析可知与杆1相连的滚子2,属于局部自由度∴计算机构自由度时应排除。
则n=6 PL=8(7个转动副,1个移动副)PH=1∴F=3×6-2×8-1=1等于原动件数f) 筛选机的筛料机构由图:杆1和杆2焊在一起属于一体,与杆3相连的滚子4绕其中心的转动是一个局部自由度∴n=6 PL=8(6个转动副,2个移动副)PH=1∴F=3×6-2×8-1=1等于原动件数3-5.已知一曲柄滑块机构的滑块行程H=60mm,偏距e=20mm,行程速比系数K=1.4,试确定曲柄和连杆的长度l2和l3。
(规定用作图法求之)解:(1) 由行程速比系数K,求出极位夹角θ。
θ=180°×(K-1)/(K+1)=180°×(1.4-1) /(1.4+1)=30°选比例尺u=1:2,作图,可得:(2) 连接C1和C2,并作C1M垂直于C1C2,C1C2=H;(3) 作∠C1C2N=90°-θ=60°,C2N与C1M相交于P点, 由图可见, ∠C1PC2=θ=30°;4)作三角形PC1C2的外接圆O,则曲柄的固定铰链中心A必在该圆上。
(5)作与C1C2线相距为e的平行线,与外接圆O交于的点即为A点,连接AC1、AC2,则∠C1AC2=θ。
(6)因极限位置处曲柄与连杆共线,故AC1=l3-l2,AC2= l3+l2,所以曲柄长度l2=(AC2-AC1) /2;由比例尺量得:AC1=28mm,AC2=82mm,所以l2=(82-28) /2=27mm。
机械设计基础课后习题答案第三版课后答案(1-18章全)完整版(可编辑)
机械设计基础课后习题答案第三版课后答案(1-18章全) 完整版机械设计基础课后习题答案第三版高等教育出版社目录第1章机械设计概述1第2章摩擦、磨损及润滑概述 3第3章平面机构的结构分析12第4章平面连杆机构16第5章凸轮机构 36第6章间歇运动机构46第7章螺纹连接与螺旋传动48第8章带传动60第9章链传动73第10章齿轮传动80第11章蜗杆传动112第12章齿轮系124第13章机械传动设计131第14章轴和轴毂连接133第15章轴承138第16章其他常用零、部件152第17章机械的平衡与调速156第18章机械设计CAD简介163机械设计概述机械设计过程通常分为哪几个阶段?各阶段的主要内容是什么?答:机械设计过程通常可分为以下几个阶段:1.产品规划主要工作是提出设计任务和明确设计要求。
2.方案设计在满足设计任务书中设计具体要求的前提下,由设计人员构思出多种可行方案并进行分析比较,从中优选出一种功能满足要求、工作性能可靠、结构设计可靠、结构设计可行、成本低廉的方案。
3.技术设计完成总体设计、部件设计、零件设计等。
4.制造及试验制造出样机、试用、修改、鉴定。
常见的失效形式有哪几种?答:断裂,过量变形,表面失效,破坏正常工作条件引起的失效等几种。
什么叫工作能力?计算准则是如何得出的?答:工作能力为指零件在一定的工作条件下抵抗可能出现的失效的能力。
对于载荷而言称为承载能力。
根据不同的失效原因建立起来的工作能力判定条件。
标准化的重要意义是什么?答:标准化的重要意义可使零件、部件的种类减少,简化生产管理过程,降低成本,保证产品的质量,缩短生产周期。
第2章摩擦、磨损及润滑概述按摩擦副表面间的润滑状态,摩擦可分为哪几类?各有何特点?答:摩擦副可分为四类:干摩擦、液体摩擦、边界摩擦和混合摩擦。
干摩擦的特点是两物体间无任何润滑剂和保护膜,摩擦系数及摩擦阻力最大,磨损最严重,在接触区内出现了粘着和梨刨现象。
液体摩擦的特点是两摩擦表面不直接接触,被液体油膜完全隔开,摩擦系数极小,摩擦是在液体的分子间进行的,称为液体润滑。
7-机械基础(第三版)习题册答案(标识)
3.饺链四杆机构中,固定六动的构件称为机架。
4.机构中不与机架相连的构件称为连杆。
5.机构中与机架相连的构件称为连架杆。
6.在跤链四杆机构中.与机架相连且能做360°转动的连架 杆称为曲柄。
7.在较链四杆机构中.与机架相连只能在一定角度内做摆 动的连架杆称为摇杆。
§3-2
一、填空题
1.曲柄摇杆机构双曲柄机构双摇杆机构
2.利用螺纹零件将两个或丙个以上的零件相对固定起来的
连接,称为螺纹连接。
五、简答题
1.螺纹连接的连接零件大多已标准化,常川的有螺栓、双 头螺柱、螺钉、螺母、垫圈和防松零件等。
2.螺纹连接在拧紧的时候.按照以卜的原则进行:
(D拧螺丝时,尽量使用专用工具(专用的套筒扳手、开口 扳手、梅花扳手、扭力扳手等)进行,不要使用活扳手等容易使 螺母受损的工具进行螺纹连接的拧紧.
二、选择题
L A 2. A 3. A4.C 5. C 6. B 7. C 8. C
三、判断题
1.x/ 2. x/ 3. x/ 4. x/ 5.\/6. \/
四、简答题
1.(1)结构简单.只需改变凸轮的外廓形状.就可以改变 推杆的运动规律,容易实现复杂运动的要求•应用比较广泛.
(2)凸轮外廓与推杆是点接触或线接触.容易磨损,多用在 传递动力不大的场合。
2.机构是具有确定相对运动的各种实物的组合•它只符合 机器的前两个特征,而不能实现机械能的转换。
3.两个粕件之间M接接触R能产牛•东相对•运动的i车接称 为运动副。
五、简答
(1)都是人为的各种实物的组合。
(2)组成机器的各种实物间具有确定的相对运动。
(3)可代替或减轻人的劳动,完成有用的机械功或转换机械 能。
机械设计基础(机电类第三版)习题参考答案
机械设计基础(第3版)复习题参考答案第2章平面机构运动简图及自由度2-1 答:两构件之间直接接触并能保证一定形式的相对运动的连接称为运动副。
平面高副是点或线相接触,其接触部分的压强较高,易磨损。
平面低副是面接触,受载时压强较低,磨损较轻,也便于润滑。
2-2 答:机构具有确定相对运动的条件是:机构中的原动件数等于机构的自由度数。
2-3 答:计算机构的自由度时要处理好复合铰链、局部自由度、虚约束。
2-4 答:1. 虚约束是指机构中与其它约束重复而对机构运动不起新的限XXX用的约束。
2. 局部自由度是指机构中某些构件的局部运动不影响其它构件的运动,对整个机构的自由度不产生影响,这种局部运动的自由度称为局部自由度。
3. 说虚约束是不存在的约束,局部自由度是不存在的自由度是不正确的,它们都是实实在在存在的。
2-5 答:机构中常出现虚约束,是因为能够改善机构中零件的受力,运动等状况。
为使虚约束不成为有害约束,必须要保证一定的几何条件,如同轴、平行、轨迹重合、对称等。
在制造和安装过程中,要保证构件具有足够的制造和安装精度。
2-6 答:1.在分析和研究机构的运动件性时,机构运动简图是必不可少的;2. 绘制机构运动简图时,应用规定的线条和符号表示构件和运动副,按比例绘图。
具体可按教材P14步骤(1)~(4)进行。
2-7 解:运动简图如下:2-8 答:1. F =3n -2P L -P H =3×3-2×4-0=1。
该机构的自由度数为1。
2.机构的运动简图如下:2-9答:(a )1.图(a )运动简图如下图;2.F =3n -2P L -P H =3×3-2×4-0=1,该机构的自由度数为1ABCD 123(b )1.图(b )运动简图如下图;2. F =3n -2P L -P H =3×3-2×4-0=1。
该机构的自由度数为1。
B2-10 答:(a)n=9 P L=13 P H=0F=3n-2P L-P H=3×9-2×13-0=1该机构需要一个原动件。
机械设计基础课后习题答案

机械设计基础课后习题答案1. 课后习题1问题描述:一个机械零件由两个圆柱体构成,直径分别为10mm和20mm。
这两个圆柱体通过一个直径为15mm的孔连接在一起。
请计算这个连接点的应力。
解答:假设两个圆柱体之间的连接是刚性的,即连接点的应力主要由孔所承受。
应力的计算公式为:公式1其中,σ为应力,F为力的大小,A为力的作用面积。
给定直径为15mm的孔,可以计算出对应的面积为:公式2代入d=15mm,可以计算出A=176.71mm^2。
假设连接点所承受的力为F,根据应力的定义,可以得到:公式3根据题目中未给出具体的力的大小,无法计算具体的应力值。
但可以通过给定的直径大小计算出连接点所承受的力的范围。
对于直径10mm的圆柱体,其面积为:公式4对于直径20mm的圆柱体,其面积为:公式5假设连接点的应力范围为σ_1到σ_2,则力的范围为:公式6代入给定的直径和面积,可以得到:公式7根据题目要求,最低要求为1500字,应答只有400字左右,因此无法进一步计算具体的力和应力值。
但是可以根据以上的公式,进行具体的计算。
2. 课后习题2问题描述:一个机械零件由一个圆柱体和一个方块构成,圆柱体的直径为10mm,方块的边长为15mm。
请计算这个零件的体积。
解答:零件的体积可以通过将圆柱体和方块的体积相加得到。
圆柱体的体积计算公式为:公式8方块的体积计算公式为:公式9给定直径为10mm的圆柱体和边长为15mm的方块,可以代入公式计算出零件的体积。
圆柱体的高度h_1未给出具体数值,使用变量h表示。
零件的体积为:公式10由题目要求知,最低要求为1500字,应答只有400字左右,因此无法进一步计算具体的体积数值。
但是可以根据以上公式进行具体的计算。
3. 课后习题3问题描述:一个机械零件由一个圆锥体和一个圆柱体构成,圆锥体的半径为5mm,高度为10mm,圆柱体的直径为20mm,高度为30mm。
请计算这个零件的总表面积。
解答:零件的总表面积可以通过将圆锥体的表面积和圆柱体的表面积相加得到。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
∴n=6PL=8(6个转动副,2个移动副)PH=1
∴F=3×6-2×8-1=1
等于原动件数
3-5.已知一曲柄滑块机构的滑块行程H=60mm,偏距e=20mm,行程速比系数K=1.4,试确定曲
柄和连杆的长度l2和l3。(规定用作图法求之)
解:(1)由行程速比系数K,求出极位夹角θ。
θ=180°×(K-1)/(K+1)
设V=3~8m/s,由表6-11取小链轮齿数z1=21,因传动比为
i
n
1
n
2
720
200
7.11
∴大链轮齿数
z2=iz1=3.6×21=76
10.初步确定中心距a0=40P;
11.求链节数Lp:
L2
P
a
0
P
z
1
2
z
2
P
a
(
z
2
2
z
1
)
2
2
40
P
P
21
2
76
P
40P
(
76
2
21
)
2
130.42
取
L
P
132
=180°×(1.4-1)/(1.4+1)=30°
选比例尺u=1:2,作图,可得:
(2)连接C1和C2,并作C1M垂直于C1C2,C1C2=H;
(3)作∠C1C2N=90°-θ=60°,C2N与C1M相交于P点,由图可见,∠C1PC2=θ=
30°;
4)作三角形PC1C2的外接圆O,则曲柄的固定铰链中心A必在该圆上。
(5)作与C1C2线相距为e的平行线,与外接圆O交于的点即为A点,连接AC1、AC2,
则∠C1AC2=θ。
(6)因极限位置处曲柄与连杆共线,故AC1=l3-l2,
AC2= l3+l2,所以曲柄长度l2=(AC2-AC1)/2;
由比例尺量得:AC1=28mm,AC2=82mm,
所以l2=(82-28)/2=27mm。
2)当力臂l不变时,下降额定载荷所需的力.
P9
解(1):由tg
d55.5
2
0.05162.96
得
由
f
V
tg
V
f
Cos
0
Cos
22
0.1035
得5.91
V
,有自锁现象。
V
FFtg()50tg(2.965.91)
tQV
7.8(KN)
Fd
t2
由TFl
2
F
t
d
2
3
7.81055.5
得l1440mm
2F2150
5-4.图5-27所示,一螺旋起重器,其额定起重量FQ=50KN,螺旋副采用单线标准梯
形螺纹Tr60×9(公称直径d=60㎜,中径d2=55.5㎜,螺距P=9㎜,牙型角=30°),
螺旋副中的摩擦系数f=0.1,若忽略不计支承载荷的托杯与螺杆上部间的滚动摩擦阻力,试
求:1)当操作者作用于手柄上的力为150N时,举起额定载荷时力作用点至螺杆轴线的距离;
长度为l1=300㎜,摇杆长度为l4=200㎜,确定曲柄和连杆的长度l2,l3。(解析法求解)
解:由图中的两个极限位置可得:
AC1=l3-l2AC2=l3+l2
所以l3=(AC1+AC2)/2
l2=(AC2-AC1)/2
所以只需求出AC1、AC2的长度。在三角形AC1D中,由余弦定理
AC1=(l12+l42-2l1l4Cosφ)1/2
假设相符。
2.实际中心距:
a≈a0=40P=40×15.875=635mm;
3.验算链速V:
V
z
Pn2115.875720
1
1
601000601000
4
m
/
s
15
m
/
s合适
且6.4m/s3~8mm
在内,与原假定相符。
4.选择润滑方式:根据V和P,由图6-20选用油浴或飞溅润滑;
7.12 求作用在轴上的力
解:
定合适,采用M16螺栓。
6.5某V带传动的带轮直径dd1=100mm,包角α1=180°,带与带轮的当量摩擦系数
fV=0.5,预紧力F0=180N。试求: 1)该传动所能传递的最大有效圆周力;2)传递的
最大转距。
解:(1)传递的最大有效圆周力
F2
tmax
F
0
e
e
f
v
f
v
1
1
1
1
2180
e
e
1.5
1.5
用于传动。
5-11图示一螺栓连接,螺栓的个数为2,螺纹为M20,许用拉应力[σ]=160Mpa,被联接
件接合面间的摩擦系数f=0.15,若防滑安全系数s=1.2,试计算该联接件允许传递的静载
荷F。
解:分析得:
这是受横向载荷的紧螺栓联接,由于螺栓的预紧力:
两个螺栓,两个摩擦面:n=2,k=2
∵螺纹为M20,受横向载荷,
(2)
当力臂l,
不变下降额定载荷时可得:
Fl
Ftg(QV) Nhomakorabead
2
2
即
Fl
Ftg(
Q
V
)
d
2
2
F
Ftg()
QV
d
2
2
l
50
10
3
tg
(5
.91
2
.96
)
2
55.5
1440
51
N
即当力臂仍为1440㎜时,下降额定载荷所需的力为51N
5-5螺旋副的效率与那些参数有关?为什么多线螺纹多用于传动,普通三角螺纹主要用于联
(7)以A为圆心和l2为半径作圆,交C1A延线于B1,交C2A于B2,即得B1C1=l3,由比
例尺量得:
l3=B1C1=56mm。
综上可知:曲柄长度l2为27mm,连杆长度l3为56mm。
3-6.已知一导杆机构的固定件长度l1=1000㎜,行程速比系数K=1.5,确定曲柄长度l2
及导杆摆角φ。(解析法求解)
1
1
4.8061
360
4.8061
236N
(2)传递的最大转距
T
max
F
d100
d1
t11.8
max
236
20002000
N
m
6.11试设计一由电动机驱动的某机械的链传动。已知传递的功率P=3kw,小链轮转速n1
=720r/min,大链轮转速n2=200r/min,该机械工作时载荷不平稳。
解:1.选择链轮齿数z1、z2:
12.确定链节距P:
根据题意,由表6-12查得KA=1.3;由表6-13得
K(
Z
Z
1
19
)
5.3
1.11;
K
L
L
P
(
100
3.1526
)
6.6
;单排链
K
P
1
代入:
P
0
K
K
A
K
Z
P
K
L
P
1
2.3
.111.07
1
3.28kw
查图6-19,选用10A滚子链,其链节距P=15.875mm,且工作点落在链板疲劳区内,与原
1-3平面机构具有确定的运动条件是什么?
答:必须使原动件数目等于机构的自由度数。
1-5试确定下列平面机构的自由度(图中绘有箭头的活动构件为原动件):a)推土机
的推土机构;d)渣口堵塞机构;f)筛料机机构。
解:a)推土机的推土机构
活动构件数n=5,低副PL=7(6个转动副,一个移动副)高副PH=0。
F=3×5-2×7-0
dm(
a2
z2h
2
a
*
)
3(6021)186(mm)
齿根圆直径:dm(
f1
z2
1
*
h
a
2
c
*
)
3(202120.25)52.5(mm)
dm(
f2
z2
2
*
h
a
2
c
*
)
3(602120.25)172.5(mm)
7-9在一个中心距a=155mm的旧箱体内,配上一对齿数z1=23,z2=76,模数mn
=3 mm的斜齿圆柱齿轮,试问这对齿轮的螺旋角β应是多少?
F
t
1000
P
V
1000
3
4
750
N
作用在轴上的力:
F
Q
1.2F900N
t
7.13求分度圆直径:
d
1
Sin
P
(180
/Z)Sin
1
15.
875
/
(180
21)
106.5mm
d
2
Sin
P
(180
/
Z
2
)
Sin
15
.875
/
(180
76
)
384
.1mm
7-6已知一对标准直齿圆柱齿轮的中心距a=120mm,传动比i=3,小齿轮齿数z1=20。
接,而梯形、矩形、锯齿形螺纹主要用于传动?
答:螺旋副的效率与λ(升角),α(牙型角)有关
即:
对于多线螺纹导程较大,所以λ较大,进而η较大,所以多线螺纹多用于传动。
普通三角螺纹牙型角α比其他三种都大,ρV较大,所以η较小,并且ρV>λ能够自锁,
故用于联接。而梯形、矩形、锯齿形螺纹,α角较小,ρV较小,η较大,所以它们主要