自动控制基本知识第13讲(奈氏稳定判据)
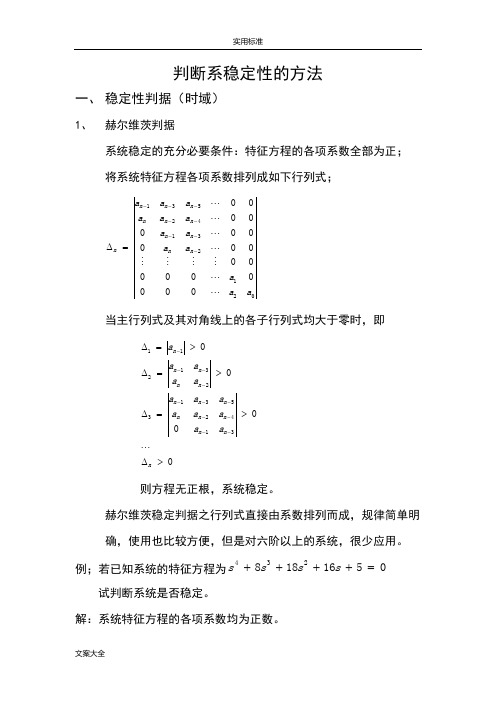
奈奎斯特稳定判据

二、控制系统的频域稳定性判据
3. n阶系统 n阶系统稳定的充要条件是当ω由0→∞时, 特征矢量D(jω)的相角变化量为 Δ Arg[D(jω)]= n² 90 °
奈奎斯特稳定判据
三、奈奎斯特判据(奈氏判据) 1. 0型系统(开环没有串联积分的系统)
⑴开环是稳定的系统
如果已知开环系统是稳定的,那么当ω由0→∞时, 若矢量F(j ω)的相角变化量为0,也就是F(j ω)的轨迹不包 围原点,那么闭环系统的特征方程式DB(s)的根全部在s 左半平面,系统是稳定的。否则,系统是不稳定的。 这样,系统稳定问题转化为找出ω由0→∞时,矢量 F(j ω)的相角变化量问题。
奈奎斯特稳定判据
四、伯德图上的稳定性判据 奈氏判据除了可以表示在极坐标图上, 还可以表示在伯德图上。
w + w=+ w=0 -1 P=0 w
0
180
-
+
四、伯德图上的稳定性判据
由图可知,幅相曲线不包围(-1,j0)点。 此结果也可以根据ω增加时,幅相曲线自下 向上(幅角减小)和自上向下(幅角增加) 穿越实轴区间(-∞,-1)的次数决定。
如果把自上向下的穿越称为正穿越,正穿越次 数用N+表示。把自下向上的穿越称为负穿越,负 穿越次数用N-表示,则R可以用N+和N-之差确定, 即 R= N+- N-
由图可知, N+=1, N-=1,故R=0。
四、伯德图上的稳定性判据
1.Bode图与Nyquist图的对应关系 a. Nyquist图的单位圆 | G(j )H(j ) | 1 对应 Bode图的横轴 20lg | G(j )H(j ) | 0 b. | G(j )H(j ) | 1 单位圆外 对应 20lg| G(j )H(j ) | 0 横轴以上区域
自动控制原理奈氏判据共28页文档
Байду номын сангаас
谢谢
11、越是没有本领的就越加自命不凡。——邓拓 12、越是无能的人,越喜欢挑剔别人的错儿。——爱尔兰 13、知人者智,自知者明。胜人者有力,自胜者强。——老子 14、意志坚强的人能把世界放在手中像泥块一样任意揉捏。——歌德 15、最具挑战性的挑战莫过于提升自我。——迈克尔·F·斯特利
1、不要轻言放弃,否则对不起自己。
2、要冒一次险!整个生命就是一场冒险。走得最远的人,常是愿意 去做,并愿意去冒险的人。“稳妥”之船,从未能从岸边走远。-戴尔.卡耐基。
梦 境
3、人生就像一杯没有加糖的咖啡,喝起来是苦涩的,回味起来却有 久久不会退去的余香。
自动控制原理奈氏判据 4、守业的最好办法就是不断的发展。 5、当爱不能完美,我宁愿选择无悔,不管来生多么美丽,我不愿失 去今生对你的记忆,我不求天长地久的美景,我只要生生世世的轮 回里有你。
(第13讲) 第五章 乃魁斯特(Nyquist)稳定性判据
在控制系统应用中,由
F (s) 1 G (s)H (s)
很容易确定
的P数。因此,如果, F (s )
的轨迹图中确定了R,则s平面上封闭曲线内的零点数
很容易确定。
开环传递函数与闭环传递函数的关系:
06-7-20
控制系统系统的稳定性分析
14
R(s)
C(s) G (s )
G (s)
B1 ( s ) A1 ( s )
06-7-20
控制系统系统的稳定性分析
3
奈奎斯特稳定判据(Nyquist Stability Criterion) 闭环传递函数
C (s) R (s) G (s)
R(s) G (s )
C(s)
H(s )
1 H ( s )G ( s )
图5-4-1 闭环系统 结构图
1 H ( s )G ( s ) 0
例如:考虑下列开环传递函数:
06-7-20 控制系统系统的稳定性分析 6
G (s)H (s)
6 ( s 1)( s 2 )
其特征方程为:
6
F (s) 1 G (s)H (s) 1
( s 1)( s 2 )
( s 1 . 5 j 2 . 4 )( s 1 . 5 j 2 . 4 ) ( s 1)( s 2 )
控制系统系统的稳定性分析 11
如果在s平面上曲线包围k个零点和k个极点(k=0,1,2…),
即包围的零点数与极点数相同,则在 F ( s ) 平面上,
相应的封闭曲线不包围
F (s)
平面上的原点。
上述讨论是映射定理的图解说明,奈奎斯特稳 定判据正是建立在映射定理的基础上。
奈奎斯特判据

(1 )负穿 越:开 环系 统的幅 相频 率特 性曲线 由下 向上( 顺时 针方向 ,幅 角减小 )对
( ,1) 区间的穿越,计为 N 1。而从 ( ,1) 区间实轴开始的负穿越称为半次负穿越,
记为
N
1 2
。
(2 )正穿 越:开 环系 统的幅 相频 率特 性曲线 由上 向下( 逆时 针方向 ,幅 角增大 )对
自动控制工程基础与应用
奈奎斯特判据
奈奎斯特判据又称频域稳定性判据,简称奈氏判据,它是在频域中利用系统的开环 频率特性来获得闭环系统稳定性的判断方法。
1.1 奈奎斯特判据的基本思想
幅角定理是奈奎斯特判据的数学基础,其基本表述如下。
假设单值有理函数 F(s) 在 s 平面上除有限个极点外都是可解析的,并设 F(s) 有 z 个零
图4-10 开环对数频率特性曲线
自动控制工程基础与应用
2π
奈奎斯特判据1.2 奈奎ຫໍສະໝຸດ 特判据奈奎斯特判据的描述如下。
已知系统的开环频率特性 Gk (j) ,则闭环系统稳定的充分必要条件为当 由 0 增至
时,辅助函数 F(s) 1 Gk (s) 的角度增量满足
F(j) 2pπ
:0
式中 p ——s 右半平面上开环极点的个数。
(4-10)
(1)当 p 0 时,因为 F( j) 1 Gk ( j) ,所以式(4-10)又可以写为
p0, 2, m0, n3
画出增补线(图中虚线),所以有 N 0 , N 1 则开环对数频率特性曲线对 180 相位线的正负穿越次数之差为 R N N 1
奈奎斯特判据
1.3 奈奎斯特判据在伯德图中的应用
3. 对数频率稳定判据
由于 p 2R 2 0 ,即 p 2R ,所以该闭环系统不稳定。
自动控制原理第13讲(奈氏稳定判据)
奈氏曲线图
10
Im
0 -1 0
(c)由于ν=2,从 0 点逆时针
=0 补画半径为无穷大的半园。
Re
P=0, N=-1
Z=2
该闭环不系统稳定。
0
Im
K Gc(S)S2(TS1)
Gd
(S)
10 S(TS1)
(d)ν=1,从 0 点逆时针
?
补画半径为无穷大的1/4园。
0
=0
Z P R P 2N
GH( j )
K*
K 180
(s p1 )(s p2 )(s p3 ) 0 270
R: s 绕奈氏路径一周时,F(j)包围[F]平面(0, j0)点的圈数
N: 开环幅相曲线精G选.H(j)包围[G]平面(-1, j0)点的圈数
5
N的确定方法
开环幅相曲线包围(-1,j0)点的圈数,仅仅与幅相曲线
C
B
-1 A
0
Re
c
10 20 40
c
lg
100 200 400 01000
rad s
ZP2N
NN N
-90
-180
c
b
-270
精选.
a
lg rad
s
12
P205 5.12 Ti 0,K0, 判断闭环系统是否
题 开环 号 极点
穿越负实轴次数
奈氏判据 闭环极点
闭环 系统
(1) P=0 (2) P=0 (3) P=0 (4) P=0 (5) P=0 (6) P=0 (7) P=0 (8) P=1 (9) P=1 (10) P=1
精选.
8
(2)开环传递函数含ν 个积分环节 ν型系统
“自动控制原理”之奈氏稳定判据的教学
“自动控制原理”之奈氏稳定判据的教学崔建峰;靳鸿【摘要】奈氏稳定判据是“自动控制原理”频域教学中的关键知识点,其教学效果直接影响到后续相对稳定性等频域相关知识点的消化与理解.长期以来,由于这部分知识点在数学形式上比较复杂抽象,给学生理解带来困难.针对这一教学问题,本文提出了一些教学改进方法和建议.经课后习题测验,表明学生在这一知识点的掌握效果上有所提升.【期刊名称】《电气电子教学学报》【年(卷),期】2018(040)002【总页数】4页(P102-104,150)【关键词】自动控制原理;稳定性判据;课程教学【作者】崔建峰;靳鸿【作者单位】中北大学计算机与控制工程学院,山西太原030051;中北大学计算机与控制工程学院,山西太原030051【正文语种】中文【中图分类】TP13;G6420 引言“自动控制原理”课程教学中,频域分析部分占较大比重,其特点是知识多,难度高[1-2]。
难度主要体现在公式复杂,计算抽象,理论性强。
频域分析部分中的奈氏稳定判据知识点尤其具有这样的特点[3]。
如果学生对这部分的消化理解产生困难,将直接影响到后续稳定裕度、带宽等频域分析核心内容的理解与应用。
然而,笔者通过多方调研了解的结果是,此部分内容的教学效果往往并不理想。
因此,文献[3]针对这一教学问题,提出了递进探究式讲授教学法以改进教学效果。
本文中,笔者也根据自身教学实践经历,分析总结了产生这一问题的主要原因,提出了一些新的可供参考的教学策略和建议。
1 奈氏稳定判据的教学现状分析奈氏稳定判据相关知识主要包括幅角定理、奈氏稳定判据推导、映射曲线绘制方法、含有开环积分环节的极坐标图补画等内容。
根据多方调研了解,这部分内容引起学生理解困难的主要原因有如下两个方面。
1)幅角定理比较抽象在讲解奈氏稳定判据时,首先要介绍幅角定理。
根据文献[1]的调研及笔者在教学过程中的验证,由于幅角定理比较抽象,如果直接利用教材中所提供的内容进行教授,教学效果往往不佳[4-5]。
奈奎斯特稳定判据

幅角原理:如果封闭曲线内有Z个F(s)的零点, P个
F(s)的极点 ,则s 沿封闭曲线s 顺时针方向转一圈时,在
F(s)平面上,曲线F(s)绕其原点逆时针转过的圈数。
+
5. 4 . 3 奈氏判据
(1)0型系统
0
s为包围虚轴和整个右半平面。
s平面s 映射 F(s)
解:① 由开环传递函数知 P = 1 。 ② 作系统的开环对数频率特性曲线。
() = 90 + arctanT2 (180 arctanT1 )
270
arctan
(T1 1
T2 ) 2T1 T2
当() = 180时,g =(1/T1T2)1/2 ,A(g)=kT2
③ 稳定性判别。 G(s)H(s)有一个积分环节N =1 ,故
开环极坐标图如图
j
01
19
k(0.1s 1) Gk (s) s(s 1)
=0
Im
增补线
1 0.1k
Re 0
(3) 稳定性判别: 因为是1型系统,需作增补线如图
当 0.1k < 1 ,k > 10时, R =1/2,z = p 2R = 0
闭环系统是稳定的。
20
5.4.4 伯德图上的稳定性判据
Im
() 1
(+)
0
由图可知,幅相曲线 不 包 围 (1 , j0) 点 。 此 结
Re 果也可以根据 增加时幅
相曲线自下向上(幅角减 小)和自上向下(幅角增加) 穿越实轴区间(,1)的 次数决定。
R = N N
自实轴区间(,1)开始向下的穿越称为半次正穿越,自实轴
区间(,1)开始向上的穿越为半次负穿越。
奈氏稳定判据课件

F
F (s)平面
8
1 、 奈氏判据数学基础…
j
z1
s
p1
0
z2
p2
s平面
s F(s) 映射
j F(s)
F(s)
0
F
F (s)平面
幅角原理: R=P-Z Z — s平面闭合曲线Γ包围F(s)的零点个数 P — s平面闭合曲线Γ包围F(s)的极点个数 R — 当s沿Γ顺时针运动一周,F(s)平面上闭合曲线гF 逆时针包围原点的圈数。
G( j0 )H( j0 )
14
1 、 奈氏判据数学基础…
3)G(S)H(S)含等幅振荡环节:
G(s)H (s)
(s2
1
2 n
)1
G1 ( s)
G(s)H (s) s jn e j
1
(2 jne j 2e2 j )1
G1( jn
e j )
j
jn
e j
e j( 90o )v1
(2n )v1
G1(
z1 )( s p1 )( s
z2 ) p2 )
F (s) s z1 s z2 s p1 s p2
F (s) s z1 s z2 s p1 s p2
2 0 (2 ) (2 ) 2
j
j
F(s)
z1
s
p1
0
z2
p2
s平面
s F(s) 映射
F(s)
重点回顾
幅相曲线绘制三要素
(1)开环幅相曲线的起点( 0)和终点( )
(2)开环幅相曲线与实轴的交点
交点处的频率 x -------穿越频率
x : Im[G( jx )H ( jx )] 0 或 (x ) G( jx )H ( jx ) k , k 0,1,2 交点处坐标 Re[G( jx )H ( jx )]
《工程控制基础》频域:奈氏 判据
例:已知某系统G(jω)H(jω)轨迹,有2个开环极点分
布在s的右半平面,试判别系统的稳定性。
解:系统有2个开环极点分布在s的右半平面(P=2),
G(jω)H(jω)轨迹在点(-1, j0)以左的负实轴有1次正穿越,
2次负穿越,
N 2(N N ) 1 2 2
求得:Z=P+N=2-2=0 所以系统是稳定系统。
K=1时,奈氏曲线穿过 (-1, j0) 点两次,系统临界稳定。
(a)P=0 0
Im P0
0
R
Re (b)P=1
0
P 1 Im
R
K
0
Re
26
例5-12
(b)若b>1, N= 2(N+ - N–)=2(2-1)=2,且 P=1,所以 Z=P+N=3 系统不稳定。
若b<1<a, N= 2(N+ - N–)=2(1-1)=0,且 P=1,所以 Z=P+N=1 系统不稳定。
(1, j0)
_
0
0
Re
G( j )H ( j )
G( j )H ( j )
23
如果G(jω)H(jω)按顺时针方向绕(-1, j0) 一周,则必正穿越一次。反之,若按逆时针方 向包围点 (-1, j0) 一周,则必负穿越一次。 这种正负穿越之和即为G(jω)H(jω)包围的圈 数。
N=2(N+-N-) 注意:这里对应的ω变化范围 0 。
3
5.3.2 幅角原理
1.映射
复数s
s平面
s=σ+jω.
F(s)
F(s) 复平面
F(s)= u+jv.
在s平面上除了F(s)零点和极点外的任意点si ,经过复变函 数F(s)的映射,均可在F(s)平面上可以找到对应的点
控制工程奈奎斯特稳定判据

—— 奈奎斯特稳定判据
奈奎斯特稳定判据
一、系统稳定性的定义和条件 二、Nyquist(奈奎斯特)稳定判据的推导 三、结论与举例说明 四、小结
一、什么是稳定性?
➢初所始谓状稳态定恢性复,到就原是来指平扰衡动状消态失的后性,能系。统由
(a)
稳定系统
(b)
不稳定系统
稳定的条件
n
时间响应 y(t) Aiesit B(t) 中:Re( si ) 0 i 1 ✓系统特征方程的所有的根(闭环极点)都 具有负实部(位于s平面的左半部)。
Im
临界稳定
Im
稳
定
Re
区
Re
不稳 定
二、奈氏稳定判据的推导
GB (s)
GK ( j)
1. 函数 F(s)=1+G(s)H(s) 与开环、闭环零 极点的关系。
2. 幅角原理(Cauchy原理) 3. 奈奎斯特判据
小结: [s] [F (s)] [GH ]
闭环极点
闭环传递函 数
GB (s)
系统稳定的 充要条件
LF
F(s) 1 G(s)H(s)
Re
[GH ]
坐标平移一个单位
N p z;且pB右 0;且pB右 zF右 0 N p 0 pF右
[GH]平面上的奈氏轨迹
若系统稳定,则: N p
N pF右 ;且pF右 pK右
Im
LGH
[GH]
N pK右
GH F
Re
(1, j0)
G( j)H ( j) s j
LF
Re
(a)
N p z 1
(b)
N pz 2
(c)
N pz 0
自动控制原理地的总结之判断系统稳定性方法
幅值趋于0,相角趋于-270°。
N=-1,P=0,Z=P-2N=2
故闭环系统不稳定。
2、对数频率判定系统稳定性
在截止频率之前,在对数幅频曲线L(W)>0.对应的频率范围对应的相角是否穿越 -180°
在V≠0时,也需要做增补线,从对数相频特性曲线上 处开始,用虚线向上补90°角(补到0°或180°)
例:已知系统的开环传递函数为 试用对数频率稳定判据判别系统闭环的稳定性。
解:
N=(N+)-(N-)=0-0=P/2
例1:已知系统特征方程为
判别系统是否稳定,若不稳定,求不稳定根的数目。
解:根据特征方程可知,其各项系数均为正。
列写劳思计算表并计算得:
当ε →0时, 故第一列有两次变号,系统特征方程有两个正根,系统不稳定。
例2:已知控制系统的特征方程为
试判定系统的稳定性。
解:根据系统的特征方程可知,其各项系数均为正。
(-1,j0)的圈ຫໍສະໝຸດ N,得到闭环传递函数在S平面的极点的个数Z
P通过G(S)可知 N:顺时针为负,逆时针为正
当V≠0时,需要做增补线 W:0
从幅相曲线 位置开始沿逆时针方向画 V×90°的圆弧增补线(理论半径为 ) 计算圈数时要包括所画圆弧的增补线在内。
例:某单位负反馈系统的开环传递函数为
试用奈氏判据判别闭环稳定性。
(b)实轴上 为根轨迹段
(c)渐近线的夹角与坐标:
(d)分离点坐标d:
解得 d1= -0.423
d2= -1.58 (舍去)因为d2不在根轨迹上
(e)与虚轴的交点坐标:
令S=jw 代入到式中得:
解得:
故
根轨迹图如下所示:
三、频率特性
自动控制原理--控制系统的频域稳定判据

n
F ( s)
1
G(s)H(s)
1
Q(s) P(s)
P(s) Q(s) P(s)
K*
n
s
i 1
s
ri pi
i1
➢F(s)的零点就是系统的闭环极点; ➢F(s)的极点就是系统的开环极点.
Y s
Rs
Gs
Y s
H s
利用图解的方法来确定F(s)位于s右半平面的零点, 从而得到判别系统稳定性与否的奈氏判据。
那些零点和极点相应的 向量的净相角变化等于 零,
j
s 平面
s p1
s• s r1
r1
p1
p3
p2
r3
s r2
r2
被 包围的零点,
其相角变化了 2。
故 顺 时针绕坐标原点 一圈。
若 顺时针包围F(s)的1个零点,则 顺时'针包围F(s)的
原点1圈。
j
s 平面
s p1 s• s r1 r1
p1
例4 绘制如下系统的奈氏曲线,并分析其闭环系统的稳定
性。
K
G(s)H(s) sT1s 1T2s 1
解:(1)奈氏曲线的起点和终点
G( j0 )H j0 ,G( j0 )H j0 90
G( j)H j 0,G( j)H j 270
(2)与负实轴的交点
2
arctanT1
arctanT2
-0.6
-0.8
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
可见,乃氏图不包围(Re-al 1Axis,j0)点,系统稳定
例2 试绘制如下四阶0型系统的奈氏图,判别其闭环系统的稳定
自动控制理论奈氏判据

ω = 3.16
{ 1− 0.1ω2 = 0
− K0
1.1ω 2
=
−1
K0 = 11 K0 < 11 29
小结
映射定理
奈氏判据
闭环系统稳定的充分必要条件是:
当ω 从 −∞ 到 +∞ 变化时,开环极坐标 图 G( jω)H ( jω) 在GH平面上逆钟向包围
(−1, j0) 点的次数等于系统的开环右极 点数。
5.4.1 映射定理
s ¨ F(s)
s平面 ¨ Cs曲线
F平面 ¨ CF曲线
5
5.4 用频率法分析系统稳定性
映射定理(应用)
F (s) = K (s + Z1 )(s + Z 2 ) (s + P1 )(s + P2 )(s + P3 )
Im
F (s)平面
F (s)
0
Re
注意:幅角的方向
CF
修改后的奈氏轨迹
开环传函(右极点),映射,极坐标图,
映射定理 →→→ 奈氏判据
30
7
5.4 用频率法分析系统稳定性
5.4.2 奈氏(Nyquist)判据 闭环系统稳定的充分必要条件是:
当ω 从−∞ 到 +∞ 变化时,开环极坐标 图 G( jω)H ( jω) 在GH平面上逆钟向包围
(−1, j0) 点的次数等于系统的开环右极 点数。
简单、精炼,一句话!
8
5.4 用频率法分析系统稳定性
自动控制理论
Automatic Control Theory
1
上节课要点复习
系统开环对数频率特性的绘制要点 系统开环极坐标图的绘制要点 系统开环对数频率特性→系统开环极坐标图 最小相位系统与非最小相位系统
奈氏判据

0
(1)
F ( j)
LGH
G( j ) H ( j )
Ls
LF
(a)s平面的Nyquist轨迹 (b)[F]平面的奈氏曲线 (c)[GH]平面的奈氏曲线
图4-37
12
奈氏轨迹 Ls在GH平面上的映射LGH称为奈奎斯特曲线或奈氏曲线.
三、奈奎斯特稳定判据 闭环系统稳定的充分必要条件是,GH 平面上的奈奎斯
四、v 0 奈奎斯特轨迹 当 G ( s) H ( s) 在S平面的虚轴上(包括原点)有极点时,由于
奈氏轨迹不能经过开环极点,LGH 必须避开虚轴上的所有开 环极点。图4-38表示当有开环极点为零时的奈氏轨迹. j S s lim re j ( ) r 0 2 2 ( 2)
R
0
(3)
0
0
(1)
( 4)
r 0
G(s) H (s)
Ls
k ( s z1 )( s z 2 ) (s z m ) G( s) H ( s) v s ( s p1 )( s p2 ) (s pnv )
s lim re j
r 0
第四节
奈奎斯特稳定判据
奈奎斯特(Nyquist)稳定判据(简称奈氏判据)是判断系统稳 定性的又一重要方法。它是将系统的开环频率特性 G( j ) H ( j ) 与复变函数 F ( s) 1 G( s) H ( s) 位于S平面右半部的零、极点数目 联系起来的一种判据。 奈氏判据是一种图解法,它依据的是系统的开环频率特性。
Im
GH
KT 2
1
0
Re
1
0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§5.3
频域稳定判据
§5.3 频域稳定判据
系统稳定的充要条件 — 全部闭环极点均具有负的实部 代数稳定判据 — Ruoth判据
由闭环特征多项式系数(不解根)判定系统稳定性
不能用于研究如何调整系统结构参数来改善系统稳定性及 性能的问题
频域稳定判据 —
Nyquist 判据 对数稳定判据
(5) P=0 NN N 011 Z=P-2N=2 不稳定
(6) P=0 NN N 110 Z=P-2N=0 稳定
(7) P=0 NN N 110 Z=P-2N=0 稳定
(8) P=1 NN N 12012 Z=P-2N=0 稳定
(9) P=1 NN N 000 Z=P-2N=1 不稳定
(10) P=1
10 Gd (S) S(TS 1)
(d)ν=1,从 0 点逆时针
?
补画半径为无穷大的1/4园。
0
=0
Re
虚线的终端落在负实轴上
P=1, N=-1/2, Z=1-2(-1/2)=2
奈氏曲线图
非最小相位系统 N N N 该闭环系统不稳定。 11
3 在对数坐标图上应用奈奎斯特稳定性判据
Im
L() 20lg GH dB
P205 5.12 Ti 0, K 0, 判断闭环系统是否稳定
题 开环 号 极点
穿越负实轴次数
奈氏判据 闭环极点
闭环 系统
(1) P=0 NNN 011 Z=P-2N=2 不稳定
(2) P=0 NN N 000 Z=P-2N=0 稳定
(3) P=0 NN N 011 Z=P-2N=2 不稳定
(4) P=0 NN N 000 Z=P-2N=0 稳定
(s p1 )(s p2 )(s p3 ) K * M (s) (s p1 )( s p2 )( s p3 )
D(s) (s 1 )(s 2 )(s 3 )
N (s) (s p1 )(s p2 )(s p3 )
(s) G(s) 1 GH (s)
F(s)的特点
① F(s)的
40
20
0 0.1
0.4
-20
-40
j ()0
0
1
2
4
G( j)H ( j) 1 G( j)H ( j) 1
C
B
-1 A
0
Re
c
10 20 40
c
lg
100 200 400 01000
rad s
Z P 2N
N N N
-90
-180
c
b
-270
a
lg rad
s
12
N: 开环幅相曲线GH(j)包围[G]平面(-1, j0)点的圈数
N的确定方法
开环幅相曲线包围(-1,j0)点的圈数,仅仅与幅相曲线
穿越实轴区间(-,-1)的次数有关。 把自上向下(逆时针)穿越这个区间的次数表示为 N
把自下向上(顺时针)穿越这个区间的次数表示为 N
注意:若穿越时从这个区间的实轴上开始时Im
)(
s
0
p3
)
s 绕奈氏路径转过一周,
F(j)绕[F]平面原点转过的角度jF()为
F( j) 2 (Z P) 2 (P Z) 2R
Z P R P 2N
GH( j )
K*
K 180
(s p1 )(s p2 )(s p3 ) 0 270
R: s 绕奈氏路径一周时,F(j)包围[F]平面(0, j0)点的圈数
由开环频率特性直接判定闭环系统的稳定性
可研究如何调整系统结构参数改善系统稳定性及性能问题
§5.3.1
奈奎斯特稳定判据 (1)
§5.3.1 奈奎斯特稳定判据
解释 设
说明 设
Z P 2N
G(s)
K
( T1s 1) (T2s 1 )(T3s 1 )
K
K1 K2
Z P 2N 1 2 0 1 不稳定 Z P 2N 1 2 ( 1) 2 不稳定
P=0, N=0 Z=0
-1
所以,闭环系统稳定。 0
Im
0
0
Re
Gb (S)
K(TS 1) S2
奈氏曲线图
10
Im
0 -1 0
(c)由于ν=2,从 0 点逆时针
=0 补画半径为无穷大的半园。
Re
P=0, N=-1
Z=2
该闭环不系统稳定。
0
Im
K Gc (S) S 2 (TS 1)
(c)
Gc
(S)
K (TS1)
P=1,
N
N
N
1 2
0
1 2
Z=P-2N=0
奈氏曲线图
闭环系统稳定。 8
(2)开环传递函数含ν 个积分环节 ν型系统
绘制开环幅相曲线后,应从频率0+对应的点 开始,逆时针补画ν/4个半径无穷大的圆。 -900ν
例2 给出含有1个积分环节的开环系统幅相曲线,
试判断系统的稳定性。
零点 i : 闭环极点 极点 pi : 开环极点
个数相同
② F ( j ) 1 GH ( j )
§5.3.1
奈奎斯特稳定判据 (3)
设F(s)在右半s平面有
Z个零点 (闭环极点) Z=2 P个极点 (开环极点) P=1
F ( j )
(
2
s 1
)(
s
2
2
)(
s
0
3
)
(
s2p1
)(
s
0
p2
Ga
(S)
(T1S
K 1)(T2S
1)
P=0, N=0 Z=P-2N=0
Im
0 0
-1
K Re
该闭环系统稳定。
(a)P=0 奈氏曲线
7
Im
0
-1
(b)
Gb
(S)
(T1S
K 1)(T2S 1)(T3S
1)
0
K Re
P=0, NN N 011
Z=P-2N=2
闭环系统不稳定。
Im
0 0
K -1
Re
N
N
N
0
1 2
1 2
Z=P-2N=2
不稳定
13
注意问题
1. 当[s]平面虚轴上有开环极点时,奈氏路径要从其右边 绕出半径为无穷小的圆弧;[G]平面对应要补充大圆弧
2. N 的最小单位为二分之一
0 闭环系统不稳定 3. Z 0 闭环系统稳定
0 有误!
Im
(a)ν=1,从 0 点逆时针
0
补画半径为无穷大的1/4园。 -1
0
Re
P=0, N=0
Z=0
所以,闭环系统稳定。
Ga (S )
K S (TS 1)
0
奈氏曲线图
9
例2 给出含有两个积分环节的开环系统 幅相曲线,试判断系统的稳定性。
(b)由于ν=2,从 0点逆时针
补画半径为无穷大的半园。
2
系统结构图如图所示
GH (s) K *M (s)
K*
N (s) (s p1 )( s p2 )(s p3 )
(s) G(s) 1 GH (s)
§5.3.1
奈奎斯特稳定判据 (2)
构造辅助函数 F(s)
F(s) 1 GH(s)
K*M(s) N(s) K*M(s)1Fra bibliotekN (s)
N (s)
记为半次正(半次负)穿越。
右图中 N 2 N 2
N N N 22 0
- +- + -1 0
Re
幅相曲线在负实轴(-.-1)
区间的正负穿越如图所示
6
稳定性分析举例
(1)开环传递函数不含积分环节(0型系统) 直接采用Z=P-2N的稳定性判
例1 据给出三个开环传递函数不含有积分环节的
奈氏曲线,试判断系统的稳定性。