伺服电机按上减速机后
DM3系列伺服电机常见问题及解决办法
DM3系列伺服电机的常见问题1.Err 4告警:之前无告警,安装减速机后出现4号告警时,可将PA18改为1.2.Err 6告警:电机型号设置不正确。
3.Err 4和Err 17告警交替出现:PA37和PA38号参数未放开,有正反力矩限制或电源线损坏。
4.Err 12和Err 17告警交替出现:电源线插头松动。
5.Err 4和Err 11告警交替出现:电源线损坏。
6.Err 17和Err 38告警交替出现:有可能是电源线的问题或者超负载,需监控转矩百分比。
7.Err 29告警:安装减速机之后出现Err 29告警,有可能是机械卡住了,建议拆掉减速机后空转测试。
8.Err 32告警:先使电机转个角度,再上电,如果不再告警说明电机内置编码器有问题,如果还是告警,说明驱动器损坏。
9.Err --:告警清除后可正常工作,如果不能正常工作有可能是电源线问题。
10.电机转速忽高忽低:可调刚性。
一般可将PA 5调高,PA 9调低。
例如,PA5=600,PA 9=18。
具体数值需根据具体设备调整。
11.雕刻机X轴有偏差:干扰,建议接地;机械方面有误差。
12.去除干扰的方法:板卡端控制线的屏蔽层接板卡的0V,驱动器端不接。
13.Y轴上电自动运行:漏电引起。
14.抱闸电机无24V输出:①参数设置:PA 56=100,PA59=4; ②查看PA33是否是100,如果是101,需将PA53使能关闭,即改为0.看101的最后一位有没有变动,不变的话,说明驱动器有问题。
变的话,但继电器不亮,可将24V接一端,0V接一端,如果还不亮,就是继电器的问题。
如果亮,说明接线或驱动器有问题。
③CN2端子23号角接电源0V,22号角,接继电器线圈。
24V,接继电器线圈。
15.刚性PA5和PA9参数,位置控制时,两者都有效。
速度控制时,PA9无效。
丝杠连接时,刚性一般设置为PA5=280,PA9=50.试验机设备上,刚性一般设置为PA5=170,PA9=40或者50。
伺服电机 说明书
第六章............................................................................................... 61
错误报警及处理 ................................................................................................ 61 6.1 报警一览表 .............................................................................................. 61 6.2 报警处理方法 .......................................................................................... 62
第七章............................................................................................... 65
通电运行 ............................................................................................................ 65 7.1 电源连接 .................................................................................................. 65 7.2 试运行 ...................................................................................................... 67 7.3 调整 .......................................................................................................... 69
伺服电机工作原理简介
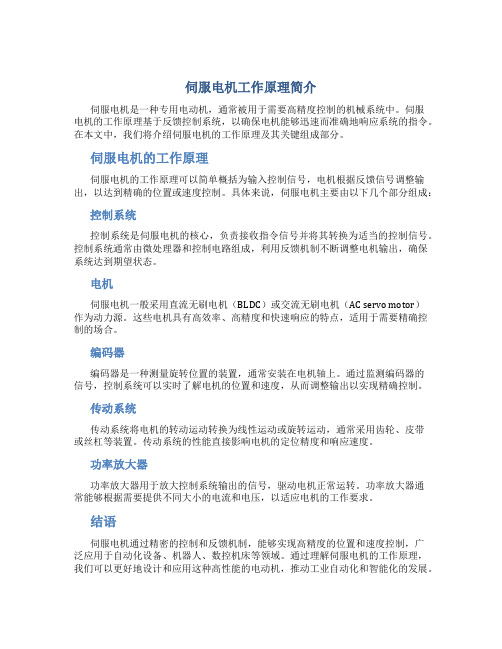
伺服电机工作原理简介伺服电机是一种专用电动机,通常被用于需要高精度控制的机械系统中。
伺服电机的工作原理基于反馈控制系统,以确保电机能够迅速而准确地响应系统的指令。
在本文中,我们将介绍伺服电机的工作原理及其关键组成部分。
伺服电机的工作原理伺服电机的工作原理可以简单概括为输入控制信号,电机根据反馈信号调整输出,以达到精确的位置或速度控制。
具体来说,伺服电机主要由以下几个部分组成:控制系统控制系统是伺服电机的核心,负责接收指令信号并将其转换为适当的控制信号。
控制系统通常由微处理器和控制电路组成,利用反馈机制不断调整电机输出,确保系统达到期望状态。
电机伺服电机一般采用直流无刷电机(BLDC)或交流无刷电机(AC servo motor)作为动力源。
这些电机具有高效率、高精度和快速响应的特点,适用于需要精确控制的场合。
编码器编码器是一种测量旋转位置的装置,通常安装在电机轴上。
通过监测编码器的信号,控制系统可以实时了解电机的位置和速度,从而调整输出以实现精确控制。
传动系统传动系统将电机的转动运动转换为线性运动或旋转运动,通常采用齿轮、皮带或丝杠等装置。
传动系统的性能直接影响电机的定位精度和响应速度。
功率放大器功率放大器用于放大控制系统输出的信号,驱动电机正常运转。
功率放大器通常能够根据需要提供不同大小的电流和电压,以适应电机的工作要求。
结语伺服电机通过精密的控制和反馈机制,能够实现高精度的位置和速度控制,广泛应用于自动化设备、机器人、数控机床等领域。
通过理解伺服电机的工作原理,我们可以更好地设计和应用这种高性能的电动机,推动工业自动化和智能化的发展。
如何根据伺服电机来配合减速机
如何根据伺服电机来配合减速机伺服电机是否需要搭配行星减速机,那么在生产中如何根据伺服电机来配合减速机呢? 1:速比减速机的减速比大致选择电机额定转速除以最终输出转速的得数。
比如需要最终输出的转速是200RPM,电机的额定转速是3000RPM,那么减速机的速比以1:15左右为佳。
最终输出转速的高低取决于工况需要。
2:扭矩减速机的额定扭矩要大于等于电机额定扭矩乘以减速比的得数。
假设电机额定扭矩为10N.M,减速比为15,那么所选择的减速机型号的额定扭矩要大于10*15=150N.M。
3:精度减速机的回程间隙(背隙、间隙或称回转间隙)视具体工作要求,一般来说配合伺服电机使用的间隙不要大于20arcmin,单级减速能做到小于等于3arcmin的一般是高端产品了。
4:规格减速机的截面尺寸一般要和电机截面尺寸差不多,其他参数最好参考所选品牌的说明,技术样本一般标明了选型步骤及计算例。
具体型号各品牌有不同表示。
通常以输出法兰尺寸或截面尺寸大致表示,一般有40/42、50/60、70/80、90、115/120、142、160、180、220、240等等规格。
通常原则:小伺服电机可以配用大减速机,但大电机一般不配用小减速机同规格刚性越高的品质越好,所以我们的工艺是硬齿面切削工艺。
KB系列伺服行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列精密伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
伺服基本原理及伺服选型计算

18
举例计算3
1. 计算折算到电机轴上的负载惯量 重物折算到电机轴上的转动惯量JW = M * ( PB / 2π)2
= 200 * (2 / 6.28)2
= 20.29 kg.cm2 螺杆转动惯量JB = MB * DB2 / 8
= 40 * 25 / 8
= 125 kg.cm2 总负载惯量JL = JW + JB = 145.29 kg.cm2 2. 计算电机转速 电机所需转速 N = V / PB = 30 / 0.02 = 1500 rpm
10
伺服选型原则
• • • • 连续工作扭矩 < 伺服电机额定扭矩 瞬时最大扭矩 < 伺服电机最大扭矩 (加速时) 负载惯量 < 3倍电机转子惯量 连续工作速度 < 电机额定转速
11
举例计算1
已知:圆盘质量M=50kg,圆盘直径 D=500mm,圆盘最高转速60rpm, 请选择伺服电机及减速机。
19
举例计算3
3. 计算电机驱动负载所需要的扭矩 克服摩擦力所需转矩Tf = M * g * µ * PB / 2π / η = 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9 = 1.387 N.m 重物加速时所需转矩TA1 = M * a * PB / 2π / η = 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9 = 1.769 N.m 螺杆加速时所需要转矩TA2 = JB * α/ η = JB * (N * 2π/ 60 / t1) / η = 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9 = 10.903 N.m 加速所需总转矩TA = TA1 + TA2 = 12.672 N.m
伺服使用
4)TSTA-15C交流伺服驱动器重要参数设置(以本装置配套驱动器、电机及其接线为准)。
参数号
参数说明
参数设置
Cn001
控制模式选择:
0 转矩控制
1 速度控制
2 位置控制(外部脉冲命令)
3 位置/速度控制切换
4 速度/转矩控制切换
5 位置/转矩控制切换
6 位置控制(内部位置命令)
图2-22 东元电机结构如图
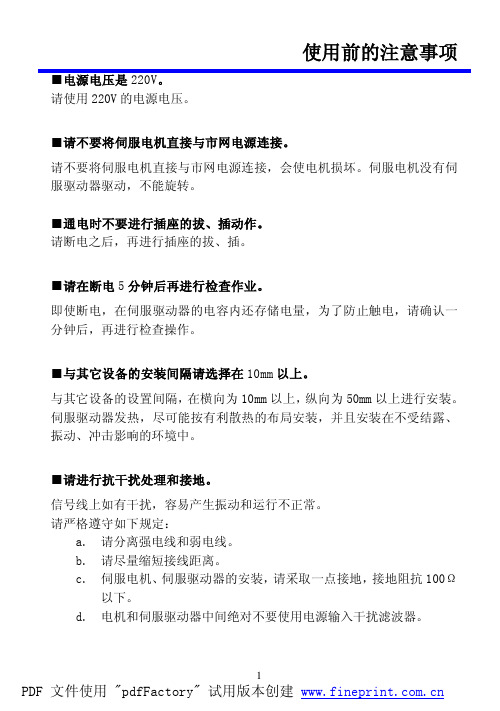
在伺服电机安装时可水平安装也可以垂直安装,但在安装时一定要注意:
1、水平安装:为避免水、油等液体自电机出线端流入电机内部,请将电缆出口置于下方。
2、垂直安装:若电机轴朝上安装且附有减速机时,须注意并防止减速机内的油渍经由电机轴心,渗入电机内部。
3、轴心的伸出量需充分,若伸出量不足时将容易使电机运动时产生振动。
1
Cn002.1
接点辅助功能—输入接点CCWL和CWL功能选择:
0:由输入接点CCWL和CWL控制CCW和CW驱动禁止。
1:不使用输入接点CCWL和CWL控制CCW和CW驱动禁止,忽略CCW和CW驱动禁止功能。
1
Cn005
编码器信号分周输出:
分周处理表示将马达的编码器旋转一转所出现的脉波信号个数转换成Cn005预设的脉波信号个数。
4、安装及拆卸电机时,请勿用榔头敲击电机,否则容易造成电机轴心及后方编码器损坏。
随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用全数字式交流伺服电机作为执行电动机。在控制方式上用脉冲串和方向信号实现。
一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
普通、减速、步进、伺服电机的区别
普通、减速、步进、伺服电机的区别这里讲的这类电机,步进电机,减速电机,伺服电机指的是直流电的微型电机,平常我们打交道到的也以直流电的居多。
电机的学问很深,本文只是大致讲一下制作机器人常用的各种电机。
普通直流电机普通电机是我们平时间的比较多的电机,电动玩具,刮胡刀等里面都有。
一般只有三个引脚,用电池的正负极接上四个引脚就会转起来,然后电池的正负极再相反的接在两引脚上电机也会向反转。
这种电机有转速过快,扭力过小的特点,一般不直接用在智能大车上。
当直流电源通过电刷向电枢绕组供电,电枢表面的N极下电介质可以流过相同方向的电流,根据左手定则导体将受到逆时针方向的力矩作用。
电枢表面S极下部分导体也流过相同轴线的电流,同样根据左手定则导体也将受到逆时针方向的力矩作用。
这样,整个电枢绕组即转子将按逆时针旋转轴,输入的直流电能就转换成转子轴上负载的机械能。
由定子和转子共同组成,定子:基座,主磁极,换向极,电刷装置等;转子(电枢):电枢铁心,电枢绕组,换向器,转轴和风扇等。
直流电动机是将直流电能转换为机械能的电动机。
因其良好的调速性能而在电力拖动中得到广泛应用。
直流电用意动机按励磁方式分为永磁、他励和自励3类,其中自励又分为并励、串励和复励3种。
减速电机减速电机就是较细电机加上了减速箱,这样便降低了转速,增加了扭力,内部空间使得普通电机有的愈广泛的使用空间。
这种集成体通常也可称为齿轮马达或齿轮电机,通常由专业的减速机生产厂进行集成组装好后成套发货。
减速电机广泛应用于家电行业、机械行业等。
用到减速数控电机的优点是简化设计、节省空间。
第二次世界大战此后,军事电子装备的迅速发展促进了美国、俄罗斯等国家微型减速电机,直流减速电机的开发和生产。
随着减速电机行业的不断发展,越来越多的行业和企业运用到了下坠减速电机,医药行业也有一批企业进入到了减速电机行业。
当前,在世界微型减速电机和直流减速电气电机市场上,德、法、英、美、中、韩等国继续保持领先水平。
伺服电机按上减速机后
伺服电机按上减速机后,输出的功率和伺服电机的功率一样吗,输出转矩怎么算呀,减速机只是个传动装置!作用是降低速度的同时增加扭矩!比如安川电机400W,额定转速3000转,额定扭力是1.27Nm,减速机的减速比是1:10,那么整体输出扭矩就是12.7Nm!输出转速就是300转。
也就是说降低几倍的速度,就增加几倍的扭力!我是做安川电机,和PHT行星减速机的,希望能帮到你!还有你也太抠点了,一分都不给!设备上使用伺服电机时如何确定它的功率选型计算方法一、转速和编码器分辨率的确认。
二、电机轴上负载力矩的折算和加减速力矩的计算。
三、计算负载惯量,惯量的匹配,安川伺服电机为例,部分产品惯量匹配可达50倍,但实际越小越好,这样对精度和响应速度好。
四、再生电阻的计算和选择,对于伺服,一般2kw以上,要外配置。
五、电缆选择,编码器电缆双绞屏蔽的,对于安川伺服等日系产品绝对值编码器是6芯,增量式是4芯。
功率P=扭矩×角速度ω=F×速度v以下无正文仅供个人用于学习、研究;不得用于商业用途。
For personal use only in study and research; not for commercial use.仅供个人用于学习、研究;不得用于商业用途。
Nur für den persönlichen für Studien, Forschung, zu kommerziellen Zwecken verwendet werden.Pour l 'étude et la recherche uniquement à des fins personnelles; pas à des fins commerciales.仅供个人用于学习、研究;不得用于商业用途。
толькодля людей, которые используются для обучения, исследований и не должны использоваться в коммерческих целях.。
伺服电机减速机扭矩计算公式
伺服电机减速机扭矩计算公式前言在伺服控制系统中,减速机是一个重要的组成部分。
它通过降低伺服电机的转速,提供更大的输出扭矩。
本文将介绍伺服电机减速机扭矩计算公式及其应用。
1.什么是伺服电机减速机?伺服电机减速机是将伺服电机输出的高速低扭矩转变为低速高扭矩的装置。
它由机械传动部分和行星减速机两部分组成,通过减少转速和增加转矩来满足实际工作需求。
2.伺服电机减速机扭矩计算公式伺服电机减速机的扭矩计算公式如下:输出扭矩=输入扭矩×减速比×传动效率其中,-输入扭矩是指伺服电机输入到减速机的扭矩,单位为牛米(N·m);-减速比是指减速机输出转速与输入转速之比,是一个无量纲的值;-传动效率是指减速机传动中的能量损失比例,通常为一个小于1的小数。
3.如何计算伺服电机减速机扭矩?要计算伺服电机减速机的扭矩,需要先获得输入扭矩、减速比和传动效率的数值。
3.1输入扭矩的获得输入扭矩是由伺服电机输出的扭矩决定的。
一般通过电机的技术手册或者测力计等设备来获得。
3.2减速比的获得减速比是减速机输出转速与输入转速之比。
减速比可以通过减速机的技术手册或者生产厂家提供的参数获得。
3.3传动效率的获得传动效率是减速机传动中的能量损失比例,影响减速机的实际输出扭矩。
传动效率可以通过减速机的技术手册或者生产厂家提供的参数获得。
3.4实例演示假设伺服电机输出扭矩为100N·m,减速比为10:1,传动效率为0.9,则计算得到的输出扭矩为:输出扭矩=100N·m×10×0.9=900N·m4.伺服电机减速机扭矩计算公式的应用伺服电机减速机扭矩计算公式在工程设计和设备选择中具有重要的应用价值。
首先,通过计算输出扭矩,可以确定所需的伺服电机和减速机的参数。
根据实际工作需求,选择合适的输入扭矩、减速比和传动效率,以获得所需的输出扭矩。
其次,通过计算输出扭矩,可以评估减速机的工作性能。
伺服系统震动问题讲解27实例解析
伺服系统震动问题讲解27实例解析27例伺服系统震动问题讲解,学会了你就是行家!内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.一、数控铣床,打开电源和系统,伺服电机嗡嗡响,响几分钟之后伺服电机会发热,调小刚性后不响了,但铣出来的圆不像圆,该怎样调?应该是几台驱动器设置的增益不同,造成电机在不同的转速下自激。
可以把待测的驱动器与参考驱动器的参数设置成一致再试一下。
惯量比看了吗?增益是一方面,但也不要忽略了惯量。
二、伺服驱动器,通过调节三环PID控制伺服电机,噪音比较大,但电机并没有震动,载波频率是10KHZ,电流采样速度是0.1us一次,为什么?噪音的原因:因为没有做输入脉冲滤波,所以才有那个噪音。
三、电机启动不起来而且噪声大振动大是什么原因?1、脱开载荷;2、用手盘动,确认灵活、无异常;3、空载启动实验;4、检查负载情况。
先看看是不是动平衡出了问题,这是电流声音,其次看电机轴承,最后是驱动器参数,多数是轴承松懈或坏。
四、电动机运行有异常噪音,什么原因和怎么处理?1、当定子与转子相擦时,会产生刺耳的“嚓嚓”碰擦声,这多是轴承有故障引起的。
应检查轴承,损坏者更新。
如果轴承未坏,而发现轴承走内圈或外圈,可镶套或更换轴承与端盖。
2、电动机缺相运行,吼声特别大。
可断电再合闸,看是否能再正常起动,如果不能起动,可能有一相熔丝断路。
开关及接触器触头一相未接通也会发生缺相。
3、轴承严重缺油时,从轴承室能听到“咝咝”声。
应清洗轴承,加新油。
4、风叶碰壳或有杂物,发出撞击声。
应校正风叶,清除风叶周围的杂物。
5、笼型转子导条断裂或绕线转子绕组接头断开时,有时高时低的“嗡嗡”声,转速也变慢,电流增大,应检查处理。
伺服电机匹配行星减速机的方法

伺服电机匹配行星减速机的方法
伺服电机匹配行星减速机的方法包括以下步骤:
1. 确定减速器的类型:根据应用需求,选择适合的减速器类型。
伺服电机匹配的行星减速器通常分为直齿、斜齿、方法兰和圆法兰等类型。
2. 确定减速器的规格:减速器的规格通常与伺服电机的功率有关。
根据电机的功率,选择相应规格的行星减速机法兰。
3. 确定减速器的减速比:减速比是根据需要伺服电机达到的效果来确定的。
可以询问技术人员所需的减速比,或者根据减速器扭矩和电机扭矩进行计算。
4. 计算减速器的扭矩:根据电机的工作条件,计算出减速器的输出扭矩。
减速器的额定扭矩应大于或等于电机的额定扭矩乘以减速比。
5. 确定减速器的精度:根据具体工作要求,选择适合的减速器精度等级。
一般来说,用于伺服电机的减速器间隙不应大于15arcmin,等级区分为P1、P2、P0。
6. 考虑其他因素:在选择伺服电机匹配的行星减速机时,还需要考虑其他因素,如减速机的刚性、质量、使用寿命和维护要求等。
综上所述,伺服电机匹配行星减速机的方法需要综合考虑多个因素,包括减速器类型、规格、减速比、扭矩、精度和其他因素。
只有选择合适的减速器才能达到理想的效果。
伺服电机减速机原理
伺服电机减速机原理
伺服电机减速机是一种将伺服电机的高速旋转转换为低速高扭矩输出的装置。
它由电机、减速器和编码器等组成。
伺服电机通过反馈控制系统精确地控制转速和位置。
然而,有时候需要将高速旋转的输出转换为低速输出,以提供更大的扭矩。
这时就需要使用减速机。
减速机的核心部分是齿轮组,它通过一定的齿轮传动比例实现速度转换。
通常,减速机采用多级传动方式,利用不同大小的齿轮组合来实现不同的减速比。
在伺服电机减速机中,编码器起着关键作用。
编码器能够反馈减速后的输出位置和速度信息,使控制系统能够实时调整电机的输出。
这样,控制系统可以准确地控制伺服电机和减速机的运行状态。
伺服电机减速机的原理是将高速旋转的输出通过减速器转换为低速高扭矩输出,并实现精确的位置和速度控制。
它在自动化设备、机械制造等领域中得到广泛应用,提高了系统的性能和精度。
伺服电机为什么要加减速机
伺服电机为什么要加减速机?伺服电机的转速一般都满足不了工作负载的低转速。
因为电机的转速输出通常是恒定的(就那么几档),而实际需要的转速千差万别。
伺服减速机的作用本身就是减慢速度和提高输出扭矩。
而减速机的对电机的输出转速与扭矩进行调整以达到满足需要,这样才是合理的。
加减速机的原因具体有以下几种伺服电机是一个动力装置,一般的伺服电机都是永磁电机,响应快控制精准受限于现阶段磁性材料和电机线圈的磁密度和导体性质,单位重量的伺服电机很可能不能产生我们理想的扭矩,或者在没有重量要求的情况下,我们所要获得的扭矩在不对伺服电机增加变速机构的情况下,造价奇高。
我们可以一个伺服加一个减速机的成本小于一个大号伺服的价格。
当伺服电机负载很大时。
所以在需要的速度范围内选适用减速比的伺服减速机,一味的提高伺服电机的功率已满足所需的扭矩,会造成成本浪费,所以需要利用减速机调整到需要的转速范围,即精准定位伺服电机的功能是进行伺服:伺服电机和减速机是孪生的,那么也有一种看法是伺服电机不是必须加减速机因为在工业自动化应用的过程中,很多时候都会用到,低速大扭矩精准控制,这种场合一般都会用到减速机,但是在高速小扭矩的工况下,一般不加减速机。
综上所述,加不加减速机是由客户使用的工况所决定的。
KF系列精密伺服减速机具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外观美观、安装方便、定位精准等特点。
适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接,如:松下、台达、安川、富士、三菱、三洋、西门子、施耐德、法那克、科比、科尔摩根、AMK、帕克等等KF系列精密伺服行星减速机:为方形法兰设计,安装尺寸简单方便。
型号分:KF40、KF60、KF90、KF120、KF160、KF200等常用机座型号。
速比:4~1000有20多种比速可选择;分一、二、三减速传动;精度:一级传动精度在5-10弧分,二级传动精度在7-12弧分;三级传动精度在9-15弧分;有数百种规格。
台达伺服电机减速机
台达伺服电机减速机【标题】台达伺服电机减速机【导言】减速机是一种将输出轴转速降低,但转矩增加的装置,广泛应用于各个行业中。
而伺服电机则是一种可以实现精确定位和运动控制的电机系统。
在许多应用中,结合伺服电机与减速机可以提供更高的精确性和可靠性。
而台达伺服电机减速机作为一种高性能且多用途的装置,被广泛应用于工业自动化、机械设备等领域。
本文将对台达伺服电机减速机的原理、特点和应用等方面进行介绍。
【一、原理】1. 台达伺服电机减速机的工作原理是将伺服电机的高速低转矩特性与减速机的低速高转矩特性相结合,以实现精确的运动控制。
通过减速机的传动装置,输入轴的高速旋转将转换为输出轴的低速旋转,并且同时提供更大的输出扭矩。
2. 伺服电机减速机中常见的传动方式有齿轮传动和带传动。
齿轮传动通常使用齿轮传动副实现差速传动,可以通过选用不同齿轮的组合来实现不同的减速比。
而带传动则是通过传动带的摩擦效应实现减速。
3. 台达伺服电机减速机的控制方式包括位置控制、速度控制和力矩控制等多种模式。
通过与伺服控制系统配合,可以实现高精度的位置控制和运动控制。
【二、特点】1. 高精度控制: 台达伺服电机减速机能够提供高精度的运动控制,可满足各种精密加工和定位要求。
其低速高转矩特性可以保证在高负载情况下仍能实现稳定的运动控制。
2. 高效率运行: 伺服电机减速机可以将高速低转矩的输入能量转换为低速高转矩的输出能量,从而提高系统的能量利用率。
其高效率运行能够降低能源消耗,减少能源浪费。
3. 高可靠性: 台达伺服电机减速机采用高强度材料制作,具有良好的抗震性和耐用性。
同时,减速机的设计经过优化,具有较长的使用寿命和稳定的性能。
4. 多种规格选择: 台达伺服电机减速机提供多种规格和减速比选项,以满足不同应用场景的需求。
用户可以根据具体要求选择适合的型号和参数。
【三、应用】台达伺服电机减速机广泛应用于各个行业,如工业自动化、机械设备、印刷包装、纺织机械、搬运机械等。
减速机额定转矩和伺服电机额定转矩的关系
减速机额定转矩和伺服电机额定转矩的关系
2012-09-11 14:21 qq390437699分类:工程技术科学|浏览1171 次
理工学科
我选的伺服电机的额定转矩是2.39N.M的,选的是新宝的速比为35:1的减速机,按照这个算减速机的额定输出转矩应该是2.39×35×效率但是我看这个减速机
标的额定转矩是71N.M 这个效率就很低了只有85%左右是不是我说的这个意思呢高手解答!!!!
分享到:
2012-09-11 14:27
提问者采纳
减速机的额定转矩讲的应该是减速机中轴和最后几级齿轮所能承受的最大转矩,不是你说的那种效率低的问题
追问:
那选型的时候是不是只能按照减速机的额定转矩来选,再根据这个额定转矩和速比来选伺服?
追答:
减速机选电机,要么就是电机选减速机
追问:。
之前就是按电机来选减速机,电机是2.39N.M 速比35 算出来是83.65N. M。
乘以一个传动效率也能达到80N.M,但是一看减速机的额定转矩只有71N. M 这个选型就不行了。
追答:
也不一定不行,看你实际使用的负载喽。
如果你实际使用的负载有83点几牛米的话,那肯定是不行滴。
伺服电机 下减速机的作用
伺服电机下减速机的作用一、伺服电机的概述伺服电机是一种能够精确控制位置、速度和加速度的电机。
它通过传感器实时反馈给控制器,以实现对电机的精确控制。
伺服电机具有高精度、高响应速度和高可靠性的特点,在工业自动化、机器人、数控加工等领域广泛应用。
二、减速机的作用减速机是一种能够减小电机输出速度、增大输出扭矩的装置。
其主要作用是通过降低电机的转速,提高输出扭矩,从而适应不同工况下的需求。
减速机能够使机械设备实现高速运动和高扭矩输出,提高设备的工作效率和运行稳定性。
三、伺服电机下减速机的作用伺服电机下减速机的作用是将伺服电机的高速低扭矩输出转换为低速高扭矩输出,以满足特定工况下的需求。
具体来说,伺服电机下减速机可以实现以下几个方面的功能:1. 提高输出扭矩:伺服电机的输出扭矩较小,无法满足某些高负载工况下的需求。
通过减速机的作用,可以将伺服电机的高速低扭矩输出转换为低速高扭矩输出,从而提高了输出扭矩。
2. 实现精确控制:伺服电机可以实现精确的位置、速度和加速度控制,而减速机可以将电机的高速输出转换为低速输出,使得控制更加精确。
这对于某些对速度要求较低、但对位置要求较高的应用场景非常重要。
3. 增加输出转矩惯量:减速机的作用是通过增加转矩的惯量,使得电机的输出能够更好地适应负载的变化。
这样可以提高系统的稳定性和响应速度。
4. 降低噪音和震动:伺服电机下减速机可以降低电机的转速,减少机械设备的震动和噪音。
这对于某些对噪音和振动要求较高的应用场景非常重要,如精密加工、医疗设备等。
5. 增加传动效率:减速机的结构设计合理,可以提高传动效率,减少能量损耗。
这对于一些对能源消耗要求较高的应用场景非常重要,如风力发电、太阳能发电等。
四、伺服电机下减速机的应用领域伺服电机下减速机广泛应用于各个领域,如机器人、自动化生产线、数控机床、印刷设备、包装设备等。
在这些领域中,伺服电机下减速机能够实现精确的位置控制、高速运动和高扭矩输出,提高设备的工作效率和稳定性,满足不同工况下的需求。
伺服电机减速机用途

伺服电机减速机用途伺服电机减速机用途伺服电机减速机是一种将高速低扭矩的电动机转换成低速高扭矩的装置,其主要作用是将电动机的输出转矩通过减速器传递给负载,以实现负载的精确控制和定位。
在工业自动化、机器人、数控加工等领域中广泛应用。
一、工业自动化领域1. 机床加工在数控加工中,伺服电机减速器可将高速低扭矩的电动机输出转换成低速高扭矩,使得数控系统可以实现高精度的定位和运动控制。
同时,它还可以提供稳定的运行性能和较长的使用寿命。
2. 自动化生产线在自动化生产线中,伺服电机减速器常被用于输送带、卷材设备等需要精确定位和控制运动的设备上。
通过与PLC或其他控制系统配合使用,可以实现对生产过程中各个环节进行精确控制和监测。
3. 包装设备在包装设备中,伺服电机减速器可用于各种需要精确定位和调整速度的设备上,如封口机、贴标机、装盒机等。
通过对电机输出转矩和速度进行精确控制,可以实现高效率的包装生产。
二、机器人领域1. 工业机器人在工业机器人中,伺服电机减速器可用于各种需要精确定位和控制运动的关节上。
通过对电机输出转矩和速度进行精确控制,可以实现工业机器人的高效率、高精度运动。
2. 服务型机器人在服务型机器人中,伺服电机减速器可用于各种需要精确定位和调整速度的设备上,如自动售货机、清洁车等。
通过对电机输出转矩和速度进行精确控制,可以实现服务型机器人的高效率、低噪音运行。
三、其他领域1. 医疗设备在医疗设备中,伺服电机减速器可用于各种需要精确定位和调整速度的设备上,如手术台、医用注射泵等。
通过对电机输出转矩和速度进行精确控制,可以实现医疗设备的高效率、低噪音运行。
2. 交通设备在交通设备中,伺服电机减速器可用于各种需要精确定位和调整速度的设备上,如电动汽车、高铁等。
通过对电机输出转矩和速度进行精确控制,可以实现交通设备的高效率、低噪音运行。
总结伺服电机减速器作为一种将高速低扭矩的电动机转换成低速高扭矩的装置,在工业自动化、机器人、数控加工等领域中有着广泛应用。
台达伺服调试经验故障排除
Q1:伺服电机与普通电机有何区别?A1:伺服电机与普通电机最大的区别在于电机转子和反馈装置。
伺服电机转子表面贴有强力磁钢片,因此可以通过定子线圈产生的磁场精确控制转子的位置,并且加减速特性远高于普通电机。
反馈装置可以精确反馈电机转子位置到伺服驱动器,伺服电机常用的反馈装置有光学编码器、旋转变压器等。
Q2:伺服驱动器输入电源是否可接单相220V ?A2:台达伺服1.5KW(含)以下可接单相/三相220V电源,2.0KW(含)以上只能接三相220V电源。
三相电源整流出来的直流波形质量更好,质量不好的直流电源会消耗母线上电容的能量,电机急加减速时电容会对母线充放电来保持母线电压稳定,因此三相电源输入比单相电源输入伺服的特性会好一些,三相电源输入提供的电流也更大。
Q3:伺服驱动器输出到电机的UVW三相是否可以互换?A3:不可以,伺服驱动器到电机UVW的接法是唯一的。
普通异步电机输入电源UVW两相互换时电机会反转,事实上伺服电机UVW任意两相互换电机也会反转,但是伺服电机是有反馈装置的,这样就出现正反馈会导致电机飞车。
伺服驱动器会检测并防止飞车,因此在UVW接错线后我们看到的现象是电机以很快的速度转过一个角度然后报警过负载ALE06。
Q4:伺服电机为何要Servo on之后才可以动作?A4:伺服驱动器并不是在通电后就会输出电流到电机,因此电机是处于放松的状态(手可以转动电机轴)。
伺服驱动器接收到Servo on信号后会输出电流到电机,让电机处于一种电气保持的状态,此时才可以接收指令去动作,没有收到指令时是不会动作的即使有外力介入(手转不动电机轴),这样伺服电机才能实现精确定位。
Q5:伺服驱动器上电就报警ALE14如何处理?A5:ALE14是正向极限异常报警,因为出厂参数设置正反向极限和紧急停止这些保护性的DI点都是常闭接点,在没有信号时则会报警。
在上位控制器已经连接了这些保护信号或者不需要这些保护信号时可通过以下方法消除报警:参数P2-15设为122或0,或者直接短接DI 点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服电机按上减速机后,输出的功率和伺服电机的功率一样吗,输出转矩怎么算呀,
减速机只是个传动装置!作用是降低速度的同时增加扭矩!比如安川电机400W,额定转速3000转,额定扭力是1.27Nm,减速机的减速比是1:10,那么整体输出扭矩就是12.7Nm!输出转速就是300转。
也就是说降低几倍的速度,就增加几倍的扭力!
我是做安川电机,和PHT行星减速机的,希望能帮到你!还有你也太抠点了,一分都不给!
设备上使用伺服电机时如何确定它的功率
选型计算方法
一、转速和编码器分辨率的确认。
二、电机轴上负载力矩的折算和加减速力矩的计算。
三、计算负载惯量,惯量的匹配,安川伺服电机为例,部分产品惯量匹配可达50倍,但实际越小越好,这样对精度和响应速度好。
四、再生电阻的计算和选择,对于伺服,一般2kw以上,要外配置。
五、电缆选择,编码器电缆双绞屏蔽的,对于安川伺服等日系产品绝对值编码器是6芯,增量式是4芯。
功率P=扭矩×角速度ω=F×速度v。