无模型自适应控制 理论与应用(侯忠生,金尚泰著)思维导图
无模型自适应控制方法综述

《无模型自适应控制方法综述》在现代控制领域中,无模型自适应控制方法因其独特的优势和广泛的应用前景而备受关注。
随着科技的不断发展和工业生产等领域对控制性能要求的日益提高,无模型自适应控制方法逐渐成为解决复杂系统控制问题的重要手段之一。
本文旨在对无模型自适应控制方法进行全面而系统的综述,深入探讨其基本原理、主要类型、特点以及在实际应用中的成果和挑战。
一、概述控制系统在工业生产、航空航天、交通运输、自动化等众多领域中起着至关重要的作用。
传统的控制方法往往基于对被控对象精确的数学模型建立,但在实际系统中,由于系统的复杂性、不确定性以及建模误差等因素的存在,很难获得准确且精确的数学模型。
这就促使了无模型自适应控制方法的产生和发展。
无模型自适应控制方法不依赖于被控对象的精确数学模型,而是通过对系统的上线观测和学习,不断调整控制策略,以适应系统的变化和不确定性,从而实现对被控对象的良好控制。
二、无模型自适应控制方法的基本原理无模型自适应控制方法的基本原理可以概括为以下几个关键步骤:(一)系统上线观测与状态估计通过传感器等手段对被控系统的状态变量进行实时监测和采集,获取系统的当前状态信息。
然后利用合适的估计方法,如卡尔曼滤波等,对系统的状态进行估计,以获得更准确的系统状态表征。
(二)控制律设计基于估计的系统状态,设计相应的控制律。
控制律的设计通常是根据一定的性能指标和控制策略进行优化,以实现对被控系统的期望控制效果。
(三)自适应调整根据系统的实际运行情况和估计误差,不断调整控制律中的参数或结构,使控制系统能够自适应地适应系统的变化和不确定性。
这种自适应调整可以是基于模型的自适应,也可以是基于数据驱动的自适应等方式。
通过以上基本原理的循环迭代,无模型自适应控制方法能够逐步逼近系统的最优控制状态,实现对被控系统的有效控制。
三、无模型自适应控制方法的主要类型(一)模型参考自适应控制(MRAC)MRAC 是无模型自适应控制中最经典的一种方法。
智能控制理论及其应用-第一章概述
1.2 智能控制的产生及其发展
(3)智能控制的发展
国际智能自动化学会(International Society Of Intelligent Automation,简称ISIA) 筹委会主席是模糊数学与模糊系统 的创始人L.A.Zadeh教授。筹委会第一次会议已于1995 年10月在加拿大温哥华召开。她的成立将在世界范围内对于 推动智能自动化的研究起到促进作用。 我国也十分重视智能控制理论和应用的研究。1993年在 北京召开了“全球华人智能控制与智能自动化大会”,1994年 在北京和沈阳召开了智能控制两个学术会议,1995年中国智 能自动化学术会议暨智能自动化专业委员会成立大会在天津 召开。
1.2 智能控制的产生及其发展
(1)智能控制的孕育
1966年,Mendel进一步在空间飞行器的学习控制系统 中应用了人工智能技术,并提出了“人工智能控制”的概 念。 1967年,Leondes和Mendel首先正式使用“智能控制” 一词,并把记忆、目标分解等一些简单的人工智能技术用 于学习控制系统,提高了系统处理不确定性问题的能力。 这就标志着智能控制的思想已经萌芽。
1.3 传统控制与智能控制
智能控制的产生来源于被控系统的高度复杂性、高度不 确定性及人们要求越来越高的控制性能,可以概括为,智能 控制是“三高三性”的产物,它的创立和发展需要对当代多种 前沿学科、多种先进技术和多种科学方法,加以高度综合和 利用。 因此,智能控制无疑是控制理论发展的高级阶段。
1.4 智能控制理论的主要特征
1.2 智能控制的产生及其发展
(3)智能控制的发展
美国《IEEE控制系统》杂志1991、1993~1995年多次发 表《智能控制专辑》,英国《国际控制》杂志1992年也发表了 《智能控制专辑》,日文《计测与控制》杂志1994年发表了 《智能系统特集》,德文《电子学》杂志自1991年以来连续发 表多篇模糊逻辑控制和神经网络方面的论文;俄文《自动化与 遥控技术》杂志1994年也发表了自适应控制的人工智能基础及 神经网络方面的研究论文。 如果说智能控制在80年代的应用和研究主要是面向工业过 程控制,那么90年代,智能控制的应用已经扩大到面向军事、 高技术领域和日用家电产品等领域。今天,“智能性”已经成为 衡量“产品”和“技术”高低的标准。
无模型自适应控制改进算法的性能仿真分析

无模型自适应控制改进算法的性能仿真分析作者:陈琛何小阳来源:《计算技术与自动化》2013年第04期摘要:在基于紧格式线性化方法的无模型自适应控制算法(Model-free Adaptive Control Based on Tight Format Linearization,TFL-MFAC)的基础上,针对大时间滞后的特点,提出针对大时滞对象的MFAC改进算法(Improved MFAC on Large Time-delay System,LTDS-MFAC)。
构造了大时滞对象并通过MATLAB仿真实验对改进MFAC算法的鲁棒性、抗干扰能力和跟踪能力进行分析。
仿真实验表明了改进MFAC算法对大时滞系统控制具有更好的控制性能。
关键词:无模型自适应控制;改进算法;仿真性能分析中图分类号:TP273 文献标识码:A1 引言上世纪九十年代,侯忠生教授给出一套新的非参数动态线性化方法[1,2],并基于该套线性化方法提出了相关的非参数模型学习自适应控制算法,初步探讨了自适应系统的对称相似结构理论,进而提出相应的无模型自适应控制理论[3],奠定了无模型自适应控制算法的基础。
文献[4]和[5]介绍了MFAC算法,并深入研究分析了MFAC的技术特点、发展现状和应用前景;阐明了控制方法与其他控制理论与方法的区别和联系,控制理论的历史就是从简单的不需要数学模型的调节器、PID控制、基于传递函数模型的经典控制理论、基于状态空间模型的现代控制理论、到现在的为了摆脱对受控系统数学模型依赖的智能控制理论的发展过程。
MFAC算法的理论基础是利用一个新引入的伪偏导数的概念,在受控系统轨线附近用一系列的动态线性时变模型来替代一般非线性系统,并仅用受控系统的I/O数据在线估计系统的伪偏导数,从而实现非线性系统的自适应控制[6]。
众所周知,大时滞过程是控制系统的较难控制的过程之一,且大时滞在工业成产过程中普遍存在[7,8]。
本文根据被控对象的大时滞特点对MFAC算法进行改进,提出针对大时滞系统的改进MFAC算法(LTDS-MFAC),构造了大时滞对象对改进算法的鲁棒性、抗干扰能力以及跟踪性能进行仿真实验分析。
自适应控制系统讲稿课件
自适应控制参考文献1.K.J. Astrom and B. Wittenmark, “Adaptive Control”, Addison Wesley, 1989.2.K.S. Narendra and A.M. Annaswamy, “Stable Adaptive Systems”, Prentice-Hall,1989.3.G.C. Goodwin and K.S. Sin, “Adaptive Filtering, Prediction and Control”,Prentice, 1984.4.韩曾晋,自适应控制,清华大学出版社,19955.J. E. Slotine and Weiping Li, Applied nonlinear control, Prentice-Hall, 19916.谢克明,现代控制理论基础,北京工业大学出版社7.侯忠生,非参数模型及其自适应控制理论,科学出版社,19991 绪论(自适应控制的基本概念和基本原理)1.1 为什么要用自适应控制在一些控制任务中,例如机器人控制,在控制运行的初始阶段,被控系统通常都具有参数不确定性。
除非这样的不确定性通过自适应或估计机制逐渐减少,否则它们将使控制系统变得不精确和不稳定。
任何一个实际系统都具有不同程度的不确定性。
例如负载扰动、海浪和阵风的扰动等。
此外还有一些量测噪声。
面对这些客观存在的各式各样的不确定性,如何设计适当的控制作用,使得某一指定的性能指标达到并保持最优或近似最优,这就是自适应控制所要研究和解决问题图1:运送不确定质量载荷的机器人例1.1:机器人操作柄的控制如图所示,机器人要运送不同尺寸、重量和惯性参数的载荷。
如果采用常数增益的控制器,机器人的运动可能就变得不精确,甚至不稳定。
例2:航海控制的自动导航系统航海系统的动态性受到许多不确定参数的影响,例如水深、船的载荷、风力风向以及海浪等。
我们可以用自适应控制来取得较好的控制性能,避免使用额外的方向舵带来的能量损耗。
自适应控制和参数估计-纽约大学教授孙静课件
for any r, i.e., x − xm → 0 for any reference input r.
11
Introduction
Start with examples
Adaptive control and passivity theory
Parameter estimation
Conclusions
2
Introduction
Start with examples
Adaptive control and passivity theory
Parameter estimation
Conclusions
Some definitions:
Control system: an interconnection of components forming a system configuration that will provide a desired system response (Modern Control Systems, Richard Dorf). To adapt: to change (oneself) so that one’s behavior will conform to new or changed circumstances (Webster dictionary). Adaptive control:
Achieve high performance Take advantage of available on-line computation resources
6
Introduction
Start with examples
Adaptive control and passivity theory
以STH为基础的论文写作─思维地图
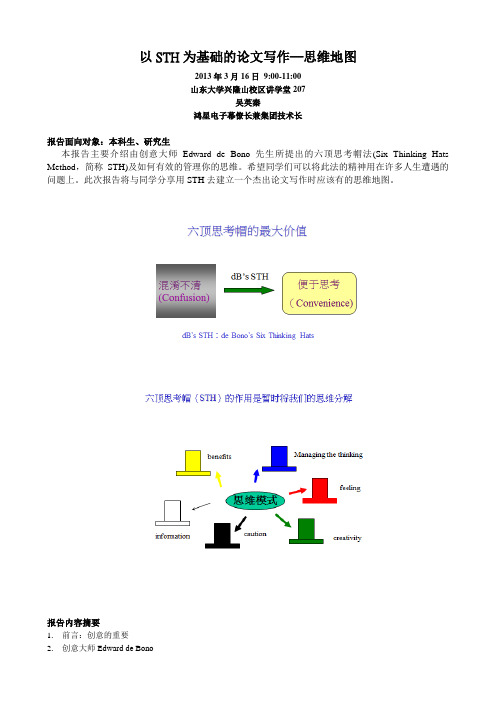
以STH为基础的论文写作─思维地图2013年3月16日9:00-11:00山东大学兴隆山校区讲学堂207吴英秦鸿星电子幕僚长兼集团技术长报告面向对象:本科生、研究生本报告主要介绍由创意大师Edward de Bono先生所提出的六顶思考帽法(Six Thinking Hats Method,简称STH)及如何有效的管理你的思维。
希望同学们可以将此法的精神用在许多人生遭遇的问题上。
此次报告将与同学分享用STH去建立一个杰出论文写作时应该有的思维地图。
报告内容摘要1.前言:创意的重要2.创意大师Edward de Bono3.六顶思考帽(Six Thinking Hats, STH)4.STH的用途5.论文写作前应有的思维地图6.在思维地图下拟定论文策略及价值7.结论8.Q&A吴英秦简历吴英秦,祖籍安徽合肥,1945年生于西安、1949年到台湾。
美国华盛顿大学航空太空科学硕士(MSAA)、美国密歇根大学造船轮机工程硕士(MSE in NAME)、计算机信息与控制工程硕士(MSE in CICE)及造船轮机工程博士。
现任鸿星电子集团幕僚长兼技术长、台湾电力电子协会监事、台湾中华工业合作促进会理事长、中国电源学会首任专家委员会高级顾问。
曾任台湾健行(前清云)科技大学电气工程系教授兼电力与信息学院院长、联德电子公司大中华区技术总监兼东莞电子厂厂长、中华映管股份有限公司中央研究所所长及TFT事业部副总经理、赛因科技股份有限公司总经理、美国Opti-UPS公司总经理、精营管理顾问公司副董事长、台湾工业技术研究院能资所能源与环境组主任、副组长、电能技术组组长及学术计划总主持人等职。
个人研究兴趣有电力电子、系统工程、质量工程、智能电网、三创教育及企业经营诊断、改善与创新等领域。
无模型自适应控制讲稿
2)、学习控制,包括迭代学习控制(iterative learning contro1)和重复控制;
3)、去伪控制(unfalsified contro1) 美国的Michael G.Safonov在l995年提出一种称为是去 伪控制的无模型控制方法,该种方法的基本思想是首先构 造一个满足性能规格的可行控制器参数集合,然后基于量 测到的新数据迭代地判别是否满足此性能规格。当新量测 到的数据否定掉目前使用的控制器之后,则控制器便会自 动地切换到新的控制器。当所使用控制器满足性能规格未 被所量测到的数据否定掉,则设计一个优化算法缩小可行 控制器的可行区域。此种无模型控制方法本质上是一种切 换控制。 4)、无模型自适应控制(MFAC:model free adaptive control)
从控制律算法(6)式中可以看出,此类控制律与 受控系统参数数学模型结构、系统阶次无关,仅用系统 输入输出(I/O)数据设计。
2、伪偏导数的辨识
控制律算法(6)式中,在当前时刻k未知的变量是伪偏 导数与控制量u(k)。由定理2.1知,满足假设2.1~2.3的 任何非线性系统均可以由带有时变参数 的动态时变线 性系统(3)式来表示,显然,任何的时变参数估计算法, 如最小二乘算法等都能估计 。这里采用与控制律算法 相对应的算法,由准则函数可以求出 的估计值。
假设2.2非线性函数f(…)关于系统当前的控制输入信 号u( k)具有连续的偏数。 假设2.3系统(1)式是广义Lipschits(利普希茨)的,即 满足对任意的k和Δu(k-1)≠0
其中 b是常数。
假设2.1是对受控系统的一条基本假设,如果它不满足 ,对这样的系统进行控是不可能的。假设2.2包括一大 类非线性系统。假设2.3是对系统输出变化量的一限制 ,即有界的输入能量变化产生有界的输出能量变化,显 然它包括一类非线性统。
现代控制工程-第9章自适应控制

5
9.1自适应控制的概念
以对象参数的估计值
作为对象参数的真值, 送入控制器,设计机构 按设计好的控制规律进 行计算,计算结果送入
参数估计 扰动
u( k )
被控对象
y(k )
可调控制器,形成新的
控制输出,以补偿对象
调节器参 数计算
特性的变化。
控制器 自校正调节器
6
9.1自适应控制的概念
根据所采用的参数估计方法的不同和控制目标函 数的不同,原则上可以构成复杂程度各不相同的自 校正调节器。 实际应用中,常以递推最小二乘为参数估计方法, 以最小方差为控制目标函数。
9.2 最小方差控制
设多项式的所有零点都在单位圆内或单位圆上,由被控对象 的数学模型得
A(q 1 ) q m B(q 1 ) e( k ) u( k ) 1 y ( k ) 1 C (q ) C (q )
B(q 1 ) E (q 1 ) A(q 1 ) q m B(q 1 ) y ( k m) u( k )] D(q 1 )e( k m) 1 u( k ) 1 [ 1 y ( k ) 1 A(q ) A(q ) C(q ) C (q )
u(k ) 1.6u(k 1) 2.88 y(k )
12
பைடு நூலகம்
9.3 自校正调节器
自校正调节器用最小二乘法在线辨识系统参数,实现最小方差 控制。但不是先用最小二乘法辨识系统参数,然后再综合最小 方差控制律。而是直接辨识最小方差预报律的参数 ,基本上 省略求取最小方差控制律的计算量。变换最小方差控制律得
K ( k ) P( k ) x( k m)[ x T ( k m) P( k ) x( k m)]1
思维导图在自动控制原理和现代控制理论教学中的实践研究

思维导图在自动控制原理和现代控制理论教学中的实践研究作者:杨扬来源:《电子技术与软件工程》2016年第15期摘要本文针对“自动控制原理”和“现代控制理论”课程中的主要教学内容和实验环节提出了相关内容的整体思维导图,采用该方法引导学生开展发散探讨式学习,通过课堂实践表明,基于思维导图法的教学方法,提高了学生思维能力和创新能力,加深了学生对基本概念和原理的理解,从而提高了教学质量和学习效率。
【关键词】自动控制原理思维导图教学改革自动控制原理是高校自动化、电气和机械及相关专业的一门重要专业基础课,是研究有关自动控制系统中经典控制的基本概念、基本原理和基本方法的一门课程,也是许多高校研究生的入学考试课程。
自动控制原理课程的概念、公式比较多,整体系统性较强。
传统的板书和多媒体很难达到教学的目的,学生在掌握过程中出现记不住公式,所学的内容很难贯穿联系在一起,从而达不到学习自动控制系统的目的。
现代控制原理这门课程是自动控制原理的后续发展课程,其主要内容为系统的现代控制理论,涉及了大量的数学矩阵运算,并且目前我国大多数高校采用经典控制和现代控制分别授课的方式教学,忽略了两者之间的联系。
笔者基于多年自动控制原理和现代控制理论的教学实践,将两门课堂内容和实验环节融合在一起,提出了基于两门课程主要内容的整体思维导图,并取得了良好的学习效果。
1 思维导图的作用思维导图是通过色彩、图形等图文并茂的形式表达一种发散性思维的有效图形,可以达到增强记忆效果的目的,这种图文并重的形式可以将复杂的主题关系用层层的图形表现出来,这样相比传统线性记录方式,思维导图更加注重关键词之间的逻辑关系和层级关系,以丰富的上下级图形联系体现课程中繁琐的基本概念间的内在逻辑。
与大脑的自然思维方式相类似,符合脑神经和多感官的学习互动模式和特性,因而特别有利于探讨式教学中激发学生的创造性思维。
2 思维导图的实施过程自动控制原理课程的主要内容为经典控制,主要研究对象是单输入单输出的线性定常系统,也是控制系统中最简单的控制系统。
DoS攻击下多智能体系统无模型自适应迭代学习跟踪控制
第40卷第6期2023年6月控制理论与应用Control Theory&ApplicationsV ol.40No.6Jun.2023DoS攻击下多智能体系统无模型自适应迭代学习跟踪控制郭金丽,卜旭辉,崔立志†,陈宗遥(河南理工大学电气工程与自动化学院,河南焦作454000)摘要:针对周期性拒绝服务(DoS)攻击下多智能体系统有限时间趋同跟踪控制问题,本文提出了一种无模型自适应迭代学习控制(MFAILC)算法.假设多智能体系统具有固定拓扑结构,并且仅有部分智能体可获取到期望轨迹信息.在多智能体系统数据传输过程中,需要经由对数量化器进行量化处理.首先,使用伪偏导数将智能体系统动态线性化,处理过程中考虑符合伯努利分布的周期性DoS攻击现象,在此基础上设计了MFAILC控制算法,其次,采用压缩映射方法给出了一个在期望意义下保证跟踪误差收敛的充分条件,并在理论上证明了所提算法的收敛性.所提算法只需利用系统的输入输出数据就可完成趋同跟踪任务.最后,仿真结果验证了所提算法的有效性.关键词:无模型自适应控制;迭代学习控制;数据量化;周期性DoS攻击;多智能体系统引用格式:郭金丽,卜旭辉,崔立志,等.DoS攻击下多智能体系统无模型自适应迭代学习跟踪控制.控制理论与应用,2023,40(6):977–985DOI:10.7641/CTA.2022.20083Model free adaptive iterative learning tracking control formulti-agent systems under DoS attacksGUO Jin-li,BU Xu-hui,CUI Li-zhi†,CHEN Zong-yao(School of Electrical Engineering and Automation,Henan Polytechnic University,Jiaozuo Henan454000,China) Abstract:A model free adaptive iterative learning control(MFAILC)algorithm is proposed for thefinite-time convergence-tracking control problem of multi-agent systems under periodic Denial-of-Service(DoS)attacks.It is as-sumed that the multi-agent system has afixed topology,and only some agents can obtain the desired trajectory information. In the process of multi-agent system data transmission,it needs to be quantized by logarithmic quantizer.Firstly,the pseu-do partial derivative is used to linearize the agent system dynamically,and the periodic DoS attack in accordance with Bernoulli distribution is considered in the process of processing.On this basis,the MFAILC scheme is designed.Then, a sufficient condition to ensure the convergence of tracking error in the expectation sense is given by using the approach of contraction mapping,and the convergence of the proposed algorithm is proved theoretically.The proposed algorithm can complete the convergence tracking task only by using the input and output data of the system.Finally,the simulation results verify the effectiveness of the proposed algorithm.Key words:model free adaptive control;iterative learning control;data quantization;periodic DoS attacks;multi-agent systemsCitation:GUO Jinli,BU Xuhui,CUI Lizhi,et al.Model free adaptive iterative learning tracking control for multi-agent systems under DoS attacks.Control Theory&Applications,2023,40(6):977–9851引言多智能体系统是由多个具有通信、传感、执行能力的智能个体组成的网络系统,广泛应用于卫星姿态控制、无人机编队控制、物联网控制等领域.多智能体系统趋同跟踪控制是研究热点之一.趋同跟踪控制是指系统中的每个智能体利用相互间传递的信息,设计合适的控制策略,从而使系统中的智能体达到某些量的一致.目前许多学者对多智能体系统趋同跟踪控制收稿日期:2022−01−27;录用日期:2022−08−02.†通信作者.E-mail:**************.cn;Tel.:+86391-3987564.本文责任编委:侯忠生.国家自然科学基金项目(62273133,U1804147),河南省高校科技创新团队项目(20IRTSTHN019),河南理工大学创新型科技团队项目(T2019–2, T2017–1),河南省创新型科技人才队伍建设工程项目(CXTD2016054)资助.Supported by the National Natural Science Foundation of China(62273133,U1804147),the Innovative Scientists and Technicians and Technicians of Henan Provincial High Education(20IRTSTHN019),the Innovative Scientists and Technicians Team of Henan Polytechnic University(T2019–2, T2017–1)and the Innovation Scientists and Technicians Troop Construction Projects of Henan Province(CXTD2016054).978控制理论与应用第40卷问题进行了研究,例如,二阶多智能体系统的趋同跟踪问题[1–3],存在时滞多智能体系统的趋同跟踪问题[4–6],等.实现趋同跟踪控制,需要各智能体之间通过无线网络进行信息交换,由于网络的不可靠性、开放性以及自身的物理局限性,会使系统遭受网络攻击.网络攻击主要有3种[7–9],分别为拒绝服务(Denial-of-Service,DoS)攻击、重放攻击和欺骗攻击.其中DoS攻击是最常见的网络攻击形式,DoS攻击是通过干扰通信网络的方式使其无法提供正常的服务或资源访问,从而导致系统性能降低,甚至无法正常工作,因此,在目前的研究当中被广泛采用.针对DoS攻击下的控制问题,国内外学者已有一些研究.文献[10–11]研究了周期性DoS攻击下的非线性系统相关控制问题.文献[12]通过建立多智能体系统数学模型,利用Lyapunov稳定性理论以及多智能体一致性理论给出多智能体一致性控制的稳定性条件和控制器设计算法,研究了基于事件触发和欺骗攻击的多智能体一致性问题.文献[13–16]通过对多智能体系统进行建模,利用自适应分布式控制方法,解决其在DoS攻击下的趋同跟踪控制问题.另一方面,多智能体系统间信息交换量庞大,而系统中一些设备的传输容量有限且传输成本高,所以为了减少这些问题对系统的影响,需要考虑数据量化.对多智能体系统的量化问题已有一些研究,文献[17]设计了一种基于离散时间分布估计器的跟踪控制方法,并利用Riccati方程和Lyapunov 函数证明了系统的跟踪收敛性,采用随机量化策略对智能体的信息通信进行建模,并给出了相应跟踪控制问题的解决方案.文献[18]针对随机非线性非仿射多智能体系统,构造了一种事件触发模糊自适应量化控制方法来解决相应控制问题.以上研究均是通过对多智能体系统建立模型进行控制器设计.然而在实际工程中,获取多智能体系统的模型不太容易,因此本文基于系统的输入输出(input/output,I/O)数据,提出了一种带有量化机制的无模型自适应迭代学习控制算法.对于多智能体系统的数据驱动控制研究已有一些结果.文献[19]通过构造输出饱和约束下的一致性误差,设计迭代学习控制算法,实现了存在输出饱和的非线性多智能体系统趋同跟踪问题.文献[20]提出具有输入共享的迭代学习控制方法来解决多智能体系统一致性跟踪问题.文献[21]利用分布式无模型自适应控制方法研究了具有固定通信拓扑和切换拓扑的多智能体系统的数据驱动一致性跟踪问题.文献[22–23]利用无模型自适应迭代学习控制算法,解决了多智能体系统的协同控制问题.上述研究并没有考虑DoS攻击的影响,此外,本文还考虑数据量化对控制系统的影响.基于上述讨论,本文设计一种带有量化机制的无模型自适应迭代学习控制算法来研究周期性DoS攻击下的模型未知非线性多智能体系统一致性跟踪问题,并且在数学期望意义下对系统的稳定性进行了分析.2问题描述2.1预备知识文中R表示实数,∥h∥表示矩阵h∈R n×n的矩阵范数,diag{·}表示适当维数的对角矩阵,I表示单位矩阵,E{·}表示数学期望因子.图论是描述多智能体系统中智能体之间的通信结构.记G=(V,Z,A)为智能体之间的有向图.在图G中,多智能体系统中含有的N个智能体(N∈R)属于节点V∈{1,2,···, N},节点的边Z∈V×V,A是图G的邻接矩阵. (l,j)∈Z表示智能体j可以接收到智能体l的信息,即节点j是节点l的子节点,节点l是节点j的父节点. N j={l∈V|(j,l)∈Z}表示智能体j的邻居集合. A=(a l,j)∈R N×N表示N个智能体通信网络的邻接矩阵,其中a l,j>0表示j,l∈Z,否则a l,j=0.假设对于所有的j∈V,有a j,j=0.定义有向图G的Laplacian 矩阵L=¯D−A,其中¯D=diag{d in1,d in2,···,d in N}, d inl=N∑j=1a l,j为邻接矩阵A的第l行元素之和,j=l.2.2多智能体系统动态考虑含有N个同构智能体的多智能体系统,第j个智能体的非线性动态系统模型如下:y j(k+1,i)=f(y j(k,i),···,y j(k−n y,i),u j(k,i),···,u j(k−n u,i)),(1)其中:k∈[0,1,···,T]表示时刻,用i表示第i次迭代, j=1,2,···,N表示第j个智能体.(后续内容中的k, i以及j所表示的含义均与此相同.)n y和n u是两个未知的正整数,y j(k,i)∈R和u j(k,i)∈R分别表示在第i次迭代第k个采样时刻第j个智能体的输出和输入信号,f(·)是未知非线性标量函数.智能体之间的通信拓扑结构用G=(V,Z,A)来表示.为了便于分析,系统满足以下两个假设:假设1f(·)关于控制输入u j(k,i)的偏导数是连续的.假设2对于任意k∈[0,1,···,T]以及i=1, 2,···,若|∆u j(k,i)|=0,系统(1)沿迭代轴方向满足广义Lipschitz条件,则|∆y j(k+1,i)| b|∆u j(k,i)|,其中:∆u j(k,i)=u j(k,i)−u j(k,−1),∆y j(k+1, i)=y j(k+1,i)−y j(k+1,i−1),b>0是一个常数.注1上述两个假设对于许多实际非线性系统是合理的.假设1是非线性控制系统中的一种典型约束条件.控制输入沿迭代轴方向变化会引起系统输出变化,假设2是对这种变第6期郭金丽等:DoS 攻击下多智能体系统无模型自适应迭代学习跟踪控制979化率上界的一种限制.许多实际系统都可以满足这种假设,例如液位控制系统、温度控制系统等.引理1考虑满足假设1和2的多智能体系统(1),若满足∆u j (k,i )=0,则系统(1)可以描述为紧格式模型[24–25]∆y j (k +1,i )=ϕj (k,i )∆u j (k,i ),(2)∀k ∈[0,1,···,T ],i =1,2,···,其中ϕj (k,i )是与迭代相关的时变参数,称为伪偏导数(pseudo partial derivative,PPD)参数,而且ϕj (k,i )有界,满足|ϕj (k,i )| b .给定多智能体系统时变期望跟踪轨迹y d (k ).多智能体系统中只有部分智能体可以获取到期望轨迹的信息.在这种通信条件下,将期望轨迹y d (k )看做是一个虚拟领导者,对其编号为0,将系统中的智能体看做是跟随者智能体.那么,完整的通信拓扑结构可描述为¯G =(V ∪{0},¯Z,¯A ),¯Z 表示有向图¯G 边的集合,¯A表示有向图¯G 的邻接矩阵.对领导者智能体(即期望轨迹)和与之相联系的跟随者智能体之间的关系做出如下定义:d j 表示领导者智能体到跟随者智能体j 的边,若有边能从领导者智能体到跟随者智能体j 时,记d j =1,反之,d j =0.定义智能体j 的一致性误差为ξj (k,i )=∑l ∈N ja j,l (y l (k,i )−y j (k,i ))+d j (y d (k )−y j (k,i )),(3)其中矩阵D =diag {d 1,d 2,···,d N }表示在通信拓扑结构中跟随者智能体与领导者智能体之间的通信情况.2.3数据量化与网络攻击建模由于无线传输网络的带宽限制,多智能体系统(1)在实际工作时数据需要进行量化处理再进行传输.系统含有N 个相同机制的量化器,每个智能体输出一致性误差都会经由量化器进行量化处理.本文考虑实际中普遍使用的对数量化器[26],其函数表达式如下:U ={±κn :κn =γn κ0,n =0,±1,±2,···}∪{0},其中:0<γ<1,γ为与量化密度有关的参数,κ0>0,U 为量化后的数据集合.量化器Q (υ)定义为Q (υ)= 0,υ=0,κn ,κn 1+τ<υ κn1−τ,−Q (−υ),υ<0,(4)式中τ=(1−γ)/(1+γ)为量化水平.可以看出,量化器Q (υ)是对称的,即Q (−υ)=−Q (υ).由于网络信道的不可靠性,系统数据进行传输时,DoS 攻击现象时常发生.多智能体系统中DoS 攻击方式主要有两种,分别为DoS 攻击者攻击系统中的单个智能体系统以及DoS 攻击者攻击智能体之间的数据包传输信道.本文主要考虑后者,攻击者对各智能体输出一致性误差经由对数量化器量化后的数据包进行攻击,来降低数据包传输的成功率,并不改变通信拓扑结构图.本文假定DoS 攻击是周期性并且受能量限制,攻击者只能在攻击期间对系统数据的传输信道进行攻击,此后进入睡眠期为下一次的攻击储存能量.对于每次迭代,攻击者在k ∈[0,1,···,T ]之间的工作周期示意图如图1所示.图1DoS 攻击工作周期示意图Fig.1Diagram of DoS jamming attack work cycle其中:M 表示攻击者任意一个工作周期的持续时间,t off表示攻击者任意一个工作周期的睡眠期持续时间,m 为DoS 攻击的第m 个工作周期.k ∈[(m −1)M +1,(m −1)M +t off]表示DoS 攻击处于睡眠期,k ∈[(m −1)M +t off+1,mM ]表示DoS 攻击处于攻击期,且mM T .由于重复系统(1)在有限的k ∈[0,1,···,T ]区间内运行,因此在每次迭代结束时,最后一段DoS 攻击可能是不完整的.对于智能体j 数据包传输信道定义βj (k,i )=0表示攻击者处于第m 个工作周期的睡眠期,βj (k,i )=1表示攻击者处于第m 个工作周期的攻击期.则βj (k,i )={0,k ∈[(m −1)M +1,(m −1)M +t off],1,k ∈[(m −1)M +t off+1,nM ].(5)在周期性DoS 攻击下,数据包传输的成功率服从伯努利分布.用θβj (k,i )来表示智能体j 在周期性DoS 攻击下数据包传输成功与否.定义θβj (k,i )=1为数据包传输成功,则{P (θβj (k,i )=1)=¯θβj,βj ={0,1},P (θβj(k,i )=0)=1−¯θβj,βj ={0,1},(6)其中P(·)表示数学概率.睡眠期内的数据包传输成功率高于攻击期内数据包传输成功率,即¯θ0j >¯θ1j.定义θβj (k,i )的数学期望为E {θβj (k,i )}=¯θβj ,βj (k,i )={0,1}.注2文献[26–29]中,假设系统遭受DoS 攻击,系统之间的实时数据传输将被绝对中断.这种描述忽略了DoS 攻击时的数据传输成功率,对DoS 攻击的描述相对简单.为了克服这个缺点,本文对周期性拒绝服务攻击的成功率采用了独立的伯努利分布来描述.980控制理论与应用第40卷本文的控制目标是:针对遭受周期性DoS攻击的多智能体系统(1),在仅有部分智能体能够获取到期望轨迹y d(k)的情况下,设计合适的控制算法,实现系统(1)在有限时间区间内对期望轨迹的完全跟踪.2.4控制算法设计在周期性DoS攻击下,θβj(k,i)=1表示多智能体系统一致性误差经由对数量化器量化后的数据包传输成功,θβj(k,i)=0表示数据包传输失败,则u j(k,i)=u j(k,i−1)+ρˆϕj(k,i)λ+|ˆϕj(k,i)|2×Q j(ξj(k+1,i−1)),θβj(k,i)=1,u j(k,i−1),θβj(k,i)=0.本小节针对遭受周期性DoS攻击的多智能体系统,设计带有量化机制的无模型自适应迭代控制算法ˆϕj(k,i)=ˆϕj (k,i−1)+η∆u j(k,i−1)µ+|∆u j(k,i−1)|2×(∆y j(k+1,i−1)−ˆϕj(k,i−1)×∆u j(k,i−1)),(7)ˆϕj(k,i)=ˆϕj(k,1),|ˆϕj(k,i)| ε,或|∆u j(k,i−1)| ε,或sgn{ˆϕj(k,i)}=sgn{ˆϕj(k,1)},(8)u j(k,i)=u j(k,i−1)+θβj(k,i)×ρˆϕj(k,i)λ+|ˆϕj(k,i)|2Q j(ξj(k+1,i−1)),(9)其中:ˆϕj(k,i)是PPD参数ϕj(k,i)的估值,ˆϕj(k,1)是ˆϕj(k,i)的初始值,η,ρ代表步长,µ,λ为权重因子;重置算法(8)的引入是为了使PPD估计算法(7)具有更强的对时变参数的跟踪能力;Q j(·)表示第j个智能体数据量化的过程,Q j(ξj(k+1,i−1))的量子化密度为δζj.通过扇形界的方法,定义量化器的输入输出信号误差为δξjξj(k,i)=Q j(ξj(k,i))−ξj(k,i),(10)其中|δξj| τξj,τξj=(1−γξj)/(1+γξj).注3在参数迭代更新算法(7)中,η是步长因子,它的引入使参数估计算法(7)具有更强的灵活性和一般性;µ为权重因子,是对PPD估计值变化量的惩罚因子,一般设置为η∈(0,1],µ>µmin.在重置算法(8)中,ε是一个非常小的正数,通常取值为10−4或10−5.在控制算法(9)中,ρ代表步长,使控制算法更具一般性,ρ是可以保证系统稳定性的控制器参数,将在下一节中提供条件;λ为权重因子,一般设置为λ>λmin.将λ引入控制算法(9)中,是用来限制控制输入量的变化∆u j(k,i),因此选取合适的λ可以用来保证控制输入信号具有一定的平滑性,并能获得较好的控制性能.注4对系统中的每个智能体输出一致性误差均采用相同机制的量化器对其进行量化处理.根据对数量化器(4)的性质可以得出,δξjξj(k,i)是有界的,并且这种有界性与输出的具体值无关.本文需要用到的对数量化器(4)满足τ∈(0,1),0|δξj| τ.注5智能体实际测量一致性误差在量化过程后的Q j(ξj(k+1,i−1))用来更新控制算法(9)中的控制输入u j(k,i).因此,该算法是一种分布式自适应迭代学习控制方法.在参数迭代更新算法(7)中,用∆y j(k+1,i−1)来估计ˆϕj(k,i),而不是ξj(k+1,i−1),这样可以保证参数迭代更新算法(7)的收敛性,如文献[17]中的证明.参数重置算法(8)可以保证参数迭代更新算法(7)拥有更强对时变参数的跟踪能力.注6通过学习控制算法(9),参数迭代更新算法(7)和参数重置算法(8),构造了非线性多智能体系统的MFAILC方案.该方法仅利用了每个智能体的I/O数据,是一种数据驱动的趋同跟踪控制方法.值得注意的是,PPD参数ˆϕj(k,i)可以通过参数迭代更新算法(7)和重置算法(8)来迭代计算,不同于现有多智能体系统的迭代学习控制方法,其学习增益是固定的,不能自动迭代调整.3主要结果由于周期性DoS攻击的引入,使得传统的分析方法不能直接应用.在本节中,介绍了基于数学期望意义的MFAILC(7)–(9)下的稳定性分析.在给出主要结果之前,首先给出以下假设和引理.假设3对于任意k∈[0,1,···,T]和任意i=1, 2,···,系统PPD参数的符号保持不变,即ϕj(k,i)>¯ε>0(或者ϕj(k,i)<¯ε<0),其中¯ε是一个小正数.不失一般性,本文假设ϕj(k,i)>¯ε>0.假设4多智能体系统的通信拓扑结构图是一个固定的强连通图.引理2用S(i)表示不同迭代次数下的正对角线不可约子空间矩阵,S表示S(i)所有可能的集合[20].有∥S(A)S(A−1)···S(1)∥ χ,其中:χ∈(0,1),S(i),i=1,2,···,A,且A矩阵属于S集合.注7假设3代表着多智能体系统输出沿迭代方向不应随着控制输入增加而减少,可以把这种假设认为是非线性系统的“拟线性系统”特征之一.与假设3类似的是,在许多基于模型控制方法中,通常要求系统输出与控制输入的方向是一致的.定理1考虑满足假设1–2,4的多智能体系统(1),其一致性误差经过量化后传输过程中遭受周期第6期郭金丽等:DoS 攻击下多智能体系统无模型自适应迭代学习跟踪控制981性DoS 攻击(6)的无模型自适应迭代学习控制算法(7)–(9),参数ρ满足ρ<1maxj =1,···,N N ∑l =1a j,l +d j,存在λmin >0且λ>λmin ,使得对于所有j =1,2,···,N ,跟踪误差e j (k,i )在i →∞时能够收敛到零,即lim i →∞y j (k,i )=y d (k,i ).证定理证明分为两部分,如下所示.1)PPD 参数ˆϕj (k,i )的有界性.如果满足重置算法(8),显然ˆϕj (k,i )有界.对于其他情况,定义参数估计误差为˜ϕj (k,i )=ˆϕj (k,i )−ϕj (k,i ),式(7)两端减去ϕj (k,i ),得˜ϕj (k,i )=(1−η|∆u j (k,i −1)|2µ+|∆u j (k,i −1)|2)טϕj (k,i −1)−∆ϕj (k,i ),(11)其中,∆ϕj (k,i )=ϕj (k,i )−ϕj (k,i −1).由假设3可知,|ϕj (k,i )|有界,存在一个正数b 使得|ϕj (k,i )| b ,|∆ϕj (k,i )| 2b .对式(11)两端取范数,可得|˜ϕj (k,i )| |(1−η|∆u j (k,i −1)|2µ+|∆u j (k,i −1)|2)|×|˜ϕj (k,i −1)|+2b.(12)当选取合适的η和µ时,0<η 1和µ>0时,可得η|∆u j (k,i −1)|2 µ+|∆u j (k,i −1)|2.所以η|∆u j (k,i −1)|2µ+|∆u j (k,i −1)|2关于|∆u j (k,i −1)|是先增后减的,其最大值为ηεj 2µ+εj 2,因此,存在一个正常数q 1使得下式成立:0<|(1−η|∆u j (k,i −1)|2µ+|∆u j (k,i −1)|2)|<1−ηεj 2µ+εj 2=q 1<1.(13)根据式(12)和式(13)可以得到|˜ϕj (k,i )| q 1|˜ϕj (k,i −1)|+2b q 12|˜ϕj (k,i −2)|+2bq 1+2b ··· q 1i −1|˜ϕj (k,1)|+2b (1−q 1i −1)1−q 1.(14)所以,˜ϕj (k,i )是有界的.对于任意k ∈[0,1,···,T ]和i =1,2,···ˆϕj (k,i )均有界.2)多智能体系统跟踪误差的收敛性.定义e j (k,i )=y d (k )−y j (k,i )为智能体j 的跟踪误差.式(3)可被重写为ξj (k,i )=∑l ∈N ja j,l (e j (k,i )−e l (k,i ))+d j e j (k,i ).(15)定义下列列向量:y (k,i )=[y 1(k,i )y 2(k,i )···y N (k,i )]T,e (k,i )=[e 1(k,i )e 2(k,i )···e N (k,i )]T,u (k,i )=[u 1(k,i )u 2(k,i )···u N (k,i )]T ,θβ(k,i )=diag {θβ1(k,i ),···,θβN (k,i )},δξξ(k,i )=diag {δξ1ξ1(k,i ),···,δξN ξN (k,i )}.由此,根据式(15),可得ξ(k +1,i −1)=(L +D )e (k +1,i −1).(16)根据MFAILC 控制算法(9),可以得到u (k,i )=u (k,i −1)+ρθβ(k,i )×Ω(k,i )Q (ξ(k +1,i −1)),(17)其中Ω(k,i )=diag {ˆϕ1(k,i )λ+|ˆϕ1(k,i )|2,···,ˆϕN (k,i )λ+|ˆϕN (k,i )|2}.根据式(2)可得∆y (k +1,i )=Φ(k,i )∆u (k,i ),(18)其中Φ(k,i )=diag {ϕ1(k,i ),···,ϕN (k,i )}.结合式(16)与式(18),可得e (k +1,i )=e (k +1,i −1)×(I −ρθβ(k,i )H (k,i )(I +δξ)(L +D )),(19)其中,H (k,i )=diag {ν1(k,i ),ν2(k,i ),···,νN (k,i )},νj (k,i )=ϕj (k,i )ˆϕj (k,i )λ+|ˆϕj (k,i )|2.对于j =1,2,···,N ,ϕj (k,i )以及ˆϕj (k,i )均有界,λmin =0.25b 2,当选择λ>λmin 时,存在一个正常数满足0<M 1<νj (k,i )<b2√λmin <1.(20)定义Ξ(k,i )=H (k,i )(L +D ).由于通信拓扑图是有向强连接图,(I −ρθβ(k,i )Ξ(k,i )(I +δξ))必须是一个不可约矩阵,若选取ρ满足ρ<1max j =1,···,N N ∑l =1a j,l +d j,982控制理论与应用第40卷即ρ小于L +D 的最大对角矩阵项的倒数.由于τζj =(1−γζj )/(1+γζj ),则τζj ∈(0,1), δζj<1.E {∥¯θβ(k,i )∥}∈(0,1),对于任意k ∈[0,1,···,T ]和i =1,2,···,都满足0<v j (k,i )<1,可以得到矩阵I −ρθβ(k,i )Ξ(k,i )(I +δξ)至少一行的和是严格小于1.因此,矩阵I −ρθβ(k,i )Ξ(k,i )(I +δξ)是一个具有正对角元素的不可约矩阵.根据引理2以及E {θβj(k,i )}=¯θβj,且¯θβj∈(0,1),对式(19)两端先取范数,再取期望,对于所有k ∈[0,1,···,T ],可得E {∥e (k +1,i )∥}E {∥[I −ρθβ(k,i )H (k,i )(I +δξ)(L +D )]∥∥[I −ρθβ(k,i −1)H (k,i −1)(I +δξ)(L +D )]∥···∥[I −ρθβ(k,2)H (k,2)(I +δξ)(L +D )]∥}E {∥e (k +1,1)∥}.(21)根据引理2,可得E {∥e (k +1,i )∥} χ⌊i −1A ⌋E {∥e (k +1,1)∥},(22)其中⌊·⌋表示最接近[i −1A]真实值的较小整数.因此,对于k ∈[0,1,···,T ],lim i →∞∥e (k +1,i )∥=0.即在均方意义下,系统收敛.证毕.注8本文将一个完整周期内的DoS 攻击集成到一个随机变量θβj (k,i )中,如式(5)–(6)所示,因此DoS 攻击完整工作期对系统的影响可以通过θβj (k,i )的值来反映.θβj (k,i )=1表示数据包传输成功,否则数据包传输失败.在收敛性分析中,根据数据包传输成功率进行讨论,以消除对攻击间隔的依赖.结果表明,无论是在攻击间隔内还是在休眠间隔内,系统沿迭代轴的最大跟踪误差都是有界的.4仿真示例本节通过由1个领导者和4个跟随者组成的多智能体系统来验证本文所提算法的有效性.多智能体系统的通信拓扑结构图如图2所示.图2智能体通信拓扑结构图Fig.2Communication graph其中,对领导者智能体编号为0,对跟随者智能体依次编号为1至4.从图2可以看出,仅有跟随者智能体1和3能够直接从领导者智能体获取信息,则D =diag {1,0,1,0}.对于智能体1至4,其动力学特性如下[22,30]:y j (k +1)=y j (k )1+y 2j (k )+u 3j (k ),0 k 300,y j (k )y j (k −1)y j (k −2)u j(k −1)1+y 2j (k +1)y 2j (k −2)+a (k )u j (k )1+y 2j (k +1)y 2j (k −2),300<k 600,其中:a (k )=1+rand(k /50)是时变参数,k ∈[0,1,···,600],j =1,2,3,4.考虑给定期望轨迹如下(即编号为0的领导者智能体轨迹):y d (k )=0.5sin(2kπ/300)+0.3cos(2kπ/100).图2的Laplacian 矩阵为L = 100−1−12−100−110−10−12.L +D 的最大对角矩阵项的倒数为0.5,因此,满足定理1的收敛条件,控制器参数ρ取0.35.其他控制器参数设置为η=0.7,µ=λ=0.5,ε=10−5.量化器参数为γξ1=γξ2=γξ3=γξ4=0.7,κξ10=κξ20=κξ30=κξ40=0.9.对于所有j =1,2,3,4,沿迭代次数i 的初始条件y j (0,i )在区间[–0.05,0.05]上随机变化.对于k ∈[0,1,···,600],首次迭代时的控制输入信号为0,即u j (k,0)=0.假设攻击者一个工作周期时间是50,其中睡眠期持续时间为25,迭代次数为500,总的运行时间为600.䱵䗃时刻 L图3DoS 攻击下的智能体输出曲线Fig.3Agent output curves under DoS attack第6期郭金丽等:DoS攻击下多智能体系统无模型自适应迭代学习跟踪控制983为方便描述,将4个智能体遭受到的DoS攻击率设置成一致.假设攻击者处于睡眠期时系统数据传输成功率为0.9,处于攻击期时系统数据传输成功率为0.7,图3–4分别给出了第400次迭代时智能体的输出曲线以及系统在DoS攻击下沿迭代轴跟踪误差曲线,图中阴影部分表示系统处在DoS攻击区间.从图3–4中可以得出,在迭代初期,系统输出的超调量和波动范围比较大,表示系统受到DoS攻击的影响发生变化.随着迭代次数的增多,跟踪误差逐渐收敛至零.当迭代次数为400时,系统可以很好地完成跟踪控制任务.图4DoS攻击下智能体最大跟踪误差曲线Fig.4Maximum tracking error curves of agents underDoSattacks图5不同DoS攻击率下智能体最大跟踪误差曲线Fig.5Maximum tracking error curves of agents underdifferent DoS attack rates另外,不失一般性,本文对每个智能体受到不同DoS攻击率以及拥有不同量化器参数两种情况分别进行了仿真验证,结果如图5–6所示.首先验证不同DoS攻击率下系统的收敛情况.各智能体的量化器参数为κξj 0=0.9,γξj=0.7(j=1,2,3,4),假设智能体1、智能体2、智能体3以及智能体4在睡眠期系统数据包传输的成功率分别为0.95,0.8,0.9,0.75,在攻击期系统数据包传输成功率分别为0.8,0.4,0.7,0.25,仿真结果如图5所示,从图中可以得出,随着DoS攻击的变化,当智能体的DoS攻击率增大导致数据包传输率降低时,算法仍然收敛,但是收敛速度会随着数据包传输成功率的降低而变慢.接下来验证不同量化器参数下系统的收敛情况,保持系统数据包传输成功率不变,均为¯β0=0.9,¯β1=0.7,且κξj=0.9(j=1,2, 3,4),智能体1到4的量化器参数分别为γξ1=0.9,γξ2=0.7,γξ3=0.5与γξ4=0.3,此时仿真结果如图6所示,可以看出,量化器参数的改变会影响系统的收敛速度,但并不影响系统稳定性,证明了所提算法的稳定性.图6不同量化器参数下智能体最大跟踪误差曲线Fig.6Maximum tracking error curves of agents under different quantizer parameters为了进一步验证本文所提算法的有效性,与P型迭代学习控制(iterative learning control,ILC)算法进行了对比,仿真结果如图7所示.由图7可以看出,本文设计的控制算法收敛速度较快.图7两种不同方法下多智能体系统最大跟踪误差曲线Fig.7Maximum tracking error curves of multiagentsystem under two different methods984控制理论与应用第40卷从图3–7可以看出,多智能体系统在网络中传输经由量化器进行量化处理后的数据包遇到DoS攻击现象时,所提MFAILC方案仅需要较少次数的重复迭代过程就可以实现较好的数据传输,实现系统对期望轨迹的完全跟踪.5结论本文考虑了一类在周期性DoS攻击下的多智能体系统的趋同跟踪问题.并通过压缩映射的方法给出了系统收敛的充分条件.结果表明,对于存在周期性DoS攻击的多智能体系统,所提算法仍可以保证系统的收敛性.该控制方案在仅有部分跟随者智能体可以从领导者智能体接收信息情况下,所有智能体均可以跟踪上期望轨迹.在未来的研究中,将考虑把所得结果扩展到随机切换拓扑结构中.参考文献:[1]DUAN P,LIU K,HUANG N,et al.Event-based distributed trackingcontrol for second-order multiagent systems with switching network-s.IEEE Transactions on Systems,Man,and Cybernetics:Systems, 2020,50(9):3220–3230.[2]WANG Fang,CHEN Xin,HE Yong,et al.Finite-time consensuscontrol of second-order multi-agent systems with jointly-connected topologies.Control Theory&Applications,2014,31(7):981–986.(王芳,陈鑫,何勇,等.联合连通条件下的二阶多智能体系统有限时间一致性控制.控制理论与应用,2014,31(7):981–986.)[3]NI J,TANG Y,SHI P.A newfixed-time consensus tracking approachfor second-order multiagent systems under directed communication topology.IEEE Transactions on Systems,Man,and Cybernetics:Sys-tems,2021,51(4):2488–2500.[4]CUI Yanliang,FEI Minrui,DU Dajun,et al.Event-triggered con-sensus of multi-agent systems with data transmission delays and ran-dom packet dropouts.Control Theory&Applications,2015,32(9): 1208–1218.(崔彦良,费敏锐,杜大军,等.通信延时和数据丢包下事件驱动的多智能体系统一致性研究.控制理论与应用,2015,32(9):1208–1218.)[5]WU Yiming,DING Jiajun,HE Xiongxiong,et al.Secure consensuscontrol formulti-agent systems under communication delay.Control Theory&Applications,2016,33(8):1039–1045.(伍益明,丁佳骏,何熊熊,等.通信时延下多智能体系统的安全一致性控制.控制理论与应用,2016,33(8):1039–1045.)[6]CHEN K,WANG J,ZHANG Y,et al.Leader-following consensusfor a class of nonlinear strick-feedback multiagent systems with state time-delays.IEEE Transactions on Systems,Man,and Cybernetics: Systems,2020,50(7):2351–2361.[7]LIU P,HUANG Z,GUO X.Event-triggered secure group consen-sus of second-order multi-agent systems under periodic DoS attack-s.The10th Data Driven Control and Learning Systems Conference, Suzhou,China:IEEE,2021:1007–1012.[8]FRANZE G,TEDESCO F,FAMULARO D.Resilience against re-play attacks:A distributed model predictive control scheme for net-worked multi-agent systems.IEEE/CAA Journal of Automatica Sini-ca,2021,8(3):628–640.[9]CUI Y,LIU Y,ZHANG W,et al.Sampled-based consensus for non-linear multiagent systems with deception attacks:The decoupledmethod.IEEE Transactions on Systems,Man,and Cybernetics:Sys-tems,2021,51(1):561–573.[10]HU S,YUE D,XIE X,et al.Resilient event-triggered controller syn-thesis of networked control systems under periodic DoS jamming at-tacks.IEEE Transactions on Cybernetics,2019,49(12):4271–4281.[11]TIAN E,WANG X,PENG C.Probabilistic-constrained distributedfiltering for a class of nonlinear stochastic systems subject to periodic DoS attacks.IEEE Transactions on Circuits and Systems I:Regular Papers,2020,67(12):5369–5379.[12]WANG Yuda,ZHA Lijuan,LIU Jinliang,et al.Event-based consen-sus of multi-agent systems with deception attacks.Journal of Nanjing University of Information Science and Technology(Natural Science Edition),2019,11(4):380–389.(王誉达,查利娟,刘金良,等.基于事件触发和欺骗攻击的多智能体一致性控制.南京信息工程大学学报(自然科学版),2019,11(4):380–389.)[13]WANG Y,GUNTER G,NICE M,et al.Online parameter estimationmethods for adaptive cruise control systems.IEEE Transactions on Intelligent Vehicles,2021,6(2):288–298.[14]ZHANG D,FENG G.A new switched system approach to leader-follower consensus of heterogeneous linear multiagent systems with DoS attack.IEEE Transactions on Systems,Man,and Cybernetics: Systems,2021,51(2):1258–1266.[15]DENG C,WEN C.Distributed resilient observer-based fault-tolerantcontrol for heterogeneous multiagent systems under actuator faults and DoS attacks.IEEE Transactions on Control of Network Systems, 2020,7(3):1308–1318.[16]GUO X,ZHANG D,WANG J,et al.Adaptive memory event-triggered observer-based control for nonlinear multi-agent systems under DoS attacks.IEEE/CAA Journal of Automatica Sinica,2021, 8(10):1644–1656.[17]HU J,FENG G.Quantized tracking control for a multi-agent sys-tem with high-order leader n Journal of Control,2011, 13(6):988–997.[18]LIU G,PAN Y,LAM H,et al.Event-triggered fuzzy adaptive quan-tized control for nonlinear multi-agent systems in nonaffine pure-feedback form.Fuzzy Sets and Systems,2021,416:27–46. [19]LIANG Jiaqi,BU Xuhui,LIU Jian,et al.Iterative learning consensustracking control for a class of multi-agent systems with output satu-ration.Control Theory&Applications,2018,35(6):786–794.(梁嘉琪,卜旭辉,刘建,等.输出饱和多智能体系统的迭代学习趋同跟踪控制.控制理论与应用,2018,35(6):786–794.)[20]YANG S,XU J,LI X.Iterative learning control with input sharing formulti-agent consensus tracking.Systems&Control Letters,2016,94: 97–106.[21]BU X,HOU Z,ZHANG H.Data-driven multiagent systems consen-sus tracking using model free adaptive control.IEEE Transactions on Neural Networks and Learning Systems,2018,29(5):1514–1524.[22]BU X,YU Q,HOU Z,et al.Model free adaptive iterative learningconsensus tracking control for a class of nonlinear multiagent sys-tems.IEEE Transactions on Systems,Man,and Cybernetics:System-s,2019,49(4):677–686.[23]HUA C,QIU Y,GUAN X.Event-triggered iterative learning contain-ment control of model-free multiagent systems.IEEE Transactions on Systems,Man,and Cybernetics:Systems,2021,51(12):7719–7726.[24]CHI R,HOU Z.Dual-stage optimal iterative learning control fornonlinear non-affine discrete-time systems.Acta Automatica Sinica, 2007,33(10):1061–1065.[25]YUAN H,XIA Y.Resilient strategy design for cyber-physical sys-tem under DoS attack over a multi-channel rmation Sciences,2018,454:312–327.。
无模型自适应控制
五、有待研究的问题
• 参数、 、 对、 控制性能的影响;
• 控制律的设计,参数估计算法设计;
• 稳定性的证明,
谢谢
•
感 谢 阅
读感 谢 阅
读
从控制律算法 6 式中可以看出,此类控制律与受控 系统参数数学模型结构、系统阶次无关,仅用系统输入输 出 I/O 数据设计,
2、伪偏导数的辨识
控制律算法 6 式中,在当前时刻k未知的变量是伪偏导 数与控制量u k ,由定理2.1知,满足假设2.1~2.3的任何 非线性系统均可以由带有时变参数 的动态时变线性系 统 3 式来表示,显然,任何的时变参数估计算法,如最小二乘 算法等都能估计 ,这里采用与控制律算法相对应的算 法,由准则函数可以求出 的估计值,
采用离散化仿真方法,采样周期Ts=10s, 当参数选择如下时,
mu=0.1; lamta=0.016; ibuxi=0.1; rou=0.1;
PID控制和MFAC控制的阶跃响应曲线如下: 在t=2000s时加入扰动信号,
2、二阶系统仿真
1 G(s)s2 s1
采样周期为0.01,采样离散化仿真方法; MFAC和PID控制器的参数都进行手工调整,
2 、学习控制,包括迭代学习控制 iterative learning contro1 和重复控制;
3 、去伪控制 unfalsified contro1 美国的Michael G.Safonov在l995年提出一种称为是去 伪控制的无模型控制方法,该种方法的基本思想是首先构造 一个满足性能规格的可行控制器参数集合,然后基于量测到 的新数据迭代地判别是否满足此性能规格,当新量测到的 数据否定掉目前使用的控制器之后,则控制器便会自动地切 换到新的控制器,当所使用控制器满足性能规格未被所量 测到的数据否定掉,则设计一个优化算法缩小可行控制器的 可行区域,此种无模型控制方法本质上是一种切换控制, 4 、无模型自适应控制 MFAC:model free adaptive control
基于回声状态网络预测的无模型自适应控制方案

基于回声状态网络预测的无模型自适应控制方案A model free adaptive control methodbased on echo state network张 进ZHANG Jin(北京国电智深控制技术有限公司,北京 102211)摘 要:无模型自适应控制(MFAC)是一种典型的数据驱动控制方法,这种方法仅利用系统输入输出数据进行控制器的设计,摆脱了控制器设计对精确数学模型的依赖。
然而,这种控制方法对于大迟延对象难以进行控制。
为了解决这个问题,提出一种基于回声状态网络预测的多入多出无模型自适应控制器,用神经网络对系统输出进行预测,降低了线性化模型的复杂度,减少了算法运算量,加快了线性化模型的收敛速度。
将这种控制方法用于汽包炉协调控制系统,证明了这种控制方法的可行性与有效性。
关键词:无模型自适应控制;回声状态网络;汽包炉中图分类号:TP273 文献标识码:A 文章编号:1009-0134(2021)06-0075-04收稿日期:2020-02-19作者简介:张进(1981 -),男,山西人,工程师,研究方向为火电厂智能控制。
0 引言20世纪50年代以来,现代控制理论逐步发展,形成了许多有效的控制理论与方法,如最优控制、鲁棒控制等。
然而,尤其在工业领域,由于各种扰动和噪声的存在,要对被控对象进行精确的建模十分困难,导致现代控制理论鲁棒性差,难以用于实际。
同时,即使能顺利对被控对象进行较为精确的模型,建立的模型往往是极为复杂的高阶强非线性时变系统,难以用于控制器的分析和设计,实际应用中成本过高。
考虑到实际系统和工业控制过程中时刻产生着丰富的输入输出数据,如何在被控对象模型未知的情况下基于过程数据设计控制律成为了控制理论界需要解决的问题,因此,研究数据驱动控制理论和方法有着重要的意义。
1994年,由候忠生提出的无模型自适应控制(model free adaptive control ,MFAC )即是一种典型的数据驱动控制方法。
自适应控制理论基础.ppt
School of Automation Engineering
3. 李雅普洛夫第二法
又称直接法,引入一个能量函数(即李雅普洛夫 函数),利用该函数及其导数函数的符号特征直接 对平衡状态的稳定性做出判断。 能量函数总大于零; 对稳定系统,能量函数具有衰减特性,即能量函数 的导数应小于零。
李雅普洛夫第二法
定理 5 (系统不稳定判定) 对时变或定常系统,
如果存在一个具有连续一阶(偏)导数的标量函数 V(x,t), 或V(x), (其中V(0,t) = 0, V(0) = 0),对于状态空 间中围绕原点的某个域的一切 x和一切 t > t0 满足: V(x,t)正定且有界,或V(x)为正定的; V(x,t)对时间 t 的导数正定且有界, V(x)的导数为正
V(x,t)正定且有界,即有 x V (x,t) x 0
V(x,t)对时间 t 的导数负定且有界,即有V(x,t) r x 0
当 x 时, x , V (x,t)
则系统原点平衡状态为大范围一致渐近稳定的。
Mobile Computing Center
School of Automation Engineering
则 有 V ( x(k))=V ( x(k+1))-V ( x(k))
=xT (k 1)Px(k 1) xT (k)Px(k)
[Φ x(k)]T P[Φx(k)] xT (k)Px(k)
令
ΦT PΦ P Q
则
V ( x(k))= -xT (k)Qx(k)
Mobile Computing Center
李雅普洛夫第二法
定理3 对定常系统 x f ( x) , t 0