数控车床圆弧插补指令GG
OKUMA数控车床系统G代码和M代码格式

代码格式代码和MOKUMA数控车床系统G G 代码内容G00 快速定位G01 直线插补G02 圆弧插补(CW)G03 圆弧插补(CW)G04 暂停G05G06G07G08G09G10G11G12G13 刀架选择:刀架A ☆G14 刀架选择:刀架B ☆G15G16G17 刀具半径补偿:X-Y 平面☆G18 刀具半径补偿:Z-X 平面☆G19 刀具半径补偿:Y-Z 平面☆G20 原始位置指令☆G21 ATC 原始位置指令☆G22 扭矩跳过指令☆G23G24G25G26G27G28 扭矩极限指令取消☆G29 扭矩极限指令☆G30 跳步循环☆G31 固定螺纹车削循环:轴向G32 固定螺纹车削循环:端面G33 固定螺纹车削循环G34 变螺距螺纹车削循环:增加螺距G35 变螺距螺纹车削循环:减少螺距G36 动力刀具轴-进给轴同步进给(正转)☆G37 动力刀具轴-进给轴同步进给(反转)☆G38G39G40 刀尖圆弧半径补偿:取消刀尖圆弧半径补偿:左G41G42 刀尖圆弧半径补偿:右G43G44G45G46G47G48G49G50 零点位移,主轴最高转速指令G51G52G53G54G55G56G57G58G59G60G61G62 镜像指令☆G63G64 到位控制关G65 到位控制开G66G67G68G69G70G71 复合固定螺纹车削循环:轴向G72 复合固定螺纹车削循环:径向G73 轴向铣槽复合固定循环G74 径向铣槽复合固定循环G75 自动倒角G76 自动倒圆角G77 攻丝复合固定循环G78 反向螺纹攻丝循环G79G80 形状定义结束(LAP)☆G81 轴向形状定义开始(LAP)☆G82 径向形状定义开始(LAP)☆G83 坯材形状定义开始(LAP)☆G84 棒料车削循环中改变切削条件(LAP)☆☆)LAP调用棒料粗车循环(G85G86 调用重复粗车循环(LAP)☆G87 调用精车循环(LAP)☆G88 调用连续螺纹车削循环(LAP)☆G89G90 绝对值编程G91 增量编程G92G93G94 每分进给模式(mm/min)G95 每转进给模式(mm/rev)G96 恒周速切削开G97 G96 取消G98G99G100 刀架A 或刀架B 单独切削的优先指令☆G101 创成加工中直线插补☆G102 创成加工中圆弧插补(正面)(CW)☆G103 创成加工中圆弧插补(正面)(CCW)☆G104G105G106G107 主轴同步攻丝,右旋螺纹☆G108 主轴同步攻丝,左旋螺纹☆G109G110 刀架A 恒周速切削G111 刀架B 恒周速切削G112 圆弧螺纹车削CW ☆G113 圆弧螺纹车削CCW ☆G114G115G116G117G118G119 刀具半径补偿:C-X-Z 平面☆G120G121G122 刀架A 副主轴W 轴指令£?G13£? ☆G123 刀架B 副主轴W 轴指令£?G14£? ☆G132 创成加工中圆弧插补(侧面)(CW)☆G133 创成加工中圆弧插补(侧面)(CCW)☆G134G135G136 坐标反转结束或Y 轴模式关☆坐标反转开始☆G137G138 Y 轴模式开☆G139G140 主轴加工模式的指定☆G141 副主轴加工模式的指定☆G142 自动脱模主轴加工模式的指定☆G143 自动脱模主轴和第3 刀架加工模式的指定G152 可编程尾架定位(牵引尾架)M 代码内容M00 程序停止M01 任选停止M02 程序结束M03 工作主轴起动(正转)[ 从工件方向看时逆时针旋转工作主轴。
G02 G03圆弧插补指令编程
圆弧终点坐标
确定圆心位置 进给速度
绝对值 X、Z 增量值 U、W 混合编程 X、W
α≤180° 用+R 360°>α>180° 用-R
车床刀架前后置,圆弧顺逆不相同 刀架后置为标准,前置顺逆方向反
教学重点
圆弧顺、逆的判断和圆心位置R正负的确定。
教学难点
圆弧顺逆的判断。
主目录
能力训练题:
YHCNC实 习 卡 片
N78 G01X21
(切断工件 )
N80 G00X100
(X轴方向退刀)
N82 Z120 M09 (回换刀点,切削液关 )
N84 M30
(程序结束,返回第一条程序段 )
四、典型零件加工演示
(用YHCNC仿真软件)
课堂小结
G02(G03)X(U)——Z(W)—— R—— F——
圆弧顺、逆
刀架后置 刀架前置
N62 T0404
(换切断刀)
N64 G00X82S400M03(点定位到φ82,正转,400r/min )
N66 Z-44
(快速点定位到离端面44处)
N68 G01X75F200 (切槽 )
N70 G00X82
(退刀到φ82 )
N72 W2
(增量移动2mm )
N74 G01X80F200 (进刀到φ80 ) N76 G?03X76W-2R2 (车R2圆弧 )
模块 学习单元
FANUC-0i数控车
G02、G03圆弧插补 指令编程
考核项目 考 核 标 准 配 分 得 分 总 分
编程考核 任错一处扣5分 70
设 YHCNC 学时
软件操作考核 任错一处扣10分 30
备 仿真软件 件数 1 记 事
数控车床G代码指令

工件坐标系设定指令(G50)
编程格式 G50 X~ Z~ 式中X、Z的值是起刀点相对于加工原点的位置。在数控车床 编程时,所有X坐标值均使用直径值,如图所示。
例:按图设置加工坐标 的程序段如下: G50 X128.7 Z375.1
精加工循环(G70)
由G71、G72、G73完成粗加工后,可以用G70进行精加 工。精加工时,G71、G72、G73程序段中的F、S、T指令无效, 只有在ns----nf程序段中的F、S、T才有效。 编程格式 : G70 P(ns) Q(nf) 式中:ns-精加工轮廓程序段中开始程序段的段号; nf-精加工轮廓程序段中结束程序段的段号。 例:在G71、G72、G73程序应用例中的nf程序段后再加上 “G70 Pns Qnf”程序段,并在ns----nf程序段中加上精加工适用 的F、S、T,就可以完成从粗加工到精加工的全过程。
螺纹切削指令(G32)
基本螺纹切削方法见图4.22所示。 编程格式 G32 X(U)~ Z(W)~ F~ 式中:X(U)、 Z(W) - 螺纹切削的终点坐标值;X省略时为圆柱螺纹切削, Z省略时为端面螺纹切削;X、Z均不省略时为锥螺纹切削;(X坐标值依据《机械设 计手册》查表确定) ;F - 螺纹导程。 螺纹切削应注意在两端设置足够的升速进刀段δ1和降速退刀段δ2。 例:试编写图4.42所示螺纹的加工程序。(螺纹导 程4mm,升速进刀段δ1=3mm,降速退刀段 δ2=1.5mm,螺纹深度2.165 mm)。
如图所示指令如下: G01 X40.0 Z20. F0.2; 绝对值指令编程 G01 U20.0 W-25.9 F0.2; 相对值指令编程
圆弧插补指令(G02 G03)
圆弧插补指令命令刀具在指定平面内按给定的F进给速度作圆弧插补运动, 用于加工圆弧轮廓。圆弧插补命令分为顺时针圆弧插补指令G02和逆时针圆弧插 补指令G03两种。其指令格式如下: 顺时针圆弧插补的指令格式:G02X(U)_Z(W)_I_K_F_; G02X(U)_Z(W)_R_ F_; 使用圆弧插补指令,可以用绝对坐标编程,也可以用相对坐标编程。绝 对坐标编程时,X、Z是圆弧终点坐标值;增量编时,U、W是终点相对始点的 距离。圆心位置的指定可以用R,也可以用I、K,R为圆弧半径值;I、K为圆心 在X轴和Z轴上相对于圆弧起点的坐标增量; F为沿圆弧切线方向的进给率或进给 速度。 G03-逆圆插补 说明:除了圆弧旋转方向相反外,格式与G02指令相同。
圆弧插补指令应用-圆弧面零件编程.

圆弧插补指令应用圆弧面零件编程圆弧面零件编程加工是学习数控车床编程技术的重要一环,也是学习其它回转体类零件加工的基础。
通过本项目的学习,要掌握如下知识,顺时针圆弧插补、逆时针圆弧插补方向的判断和G02、G03圆弧插补指令及终点坐标+半径格式的应用;仿形车削复合循环指令G73及其应用;刀尖半径补偿指令G40、G41、G42及应用;凸圆弧零件加工工艺制定及循环参数选择;完成成形面类零件编程加工及其尺寸控制。
一、零件图二、数控车床编程指令插补的概念根据给定的进给速度和给定轮廓线形的要求,在轮廓的已知点之间,确定一些中间点的方法,称为插补方法或插补原理。
编程指令(一)圆弧插补指令G02、G03G02——顺时针圆弧插补G03——逆时针圆弧插补1.指令功能:使刀具按给定进给速度沿圆弧方向进行切削加工。
2.圆弧的顺、逆方向的判断沿垂直于圆弧所在平面的坐标轴的正方向向负方向看去,刀具相对于工件的转动方向是顺时针方向为G02,逆时针方向为G03。
3.圆弧加工终点坐标+圆弧半径(或圆心坐标)指令格式G02(G03)X_Z_R_ F_G02(G03)X_ Z_ I_ K_ F_(二)径向(端面) 粗车复合循环指令G72该指令适用于圆柱棒料粗车阶梯轴(或法兰盘)的外圆或内孔,需切除较多余量时的情况。
与轴向粗车复合循环的区别仅在于切削方向平行于X轴。
[ FANUC 0i ] 系统径向(端面)粗车复合循环指令格式:G72 W(△d) R(e);G72 P(ns) Q(nf) U(△u) W(△w) F(△f) S(△s) T(t);N(ns)……;……;.N(nf) ……;(三)仿形粗车(闭环车削)复合循环指令G73该指令用于零件毛坯已基本成型的铸件或锻件的加工,铸件或锻件的形状与零件轮廓相接近。
该功能在切削工件时刀具轨迹为一闭合回路,刀具逐渐进给�使封闭的切削回路逐渐向零件最终形状靠近,完成工件的加工。
[ FANUC 0i ] 系统仿形粗车(闭环车削)复合循环指令格式:G73 U(△i) W(△k) R(d);G73 P(ns) Q(nf) U(△u) W(△w) F(△f) S(△s) T(t);N(ns)……;……;N(nf) ……;(四)刀具补偿指令1.刀具补偿的目的数控车床是按车刀刀尖对刀的,因车刀的刀尖不可能绝对尖,总有一个小圆弧,所以对刀刀尖的位置是一个假想的刀尖A。
G2G3 圆弧插补指令
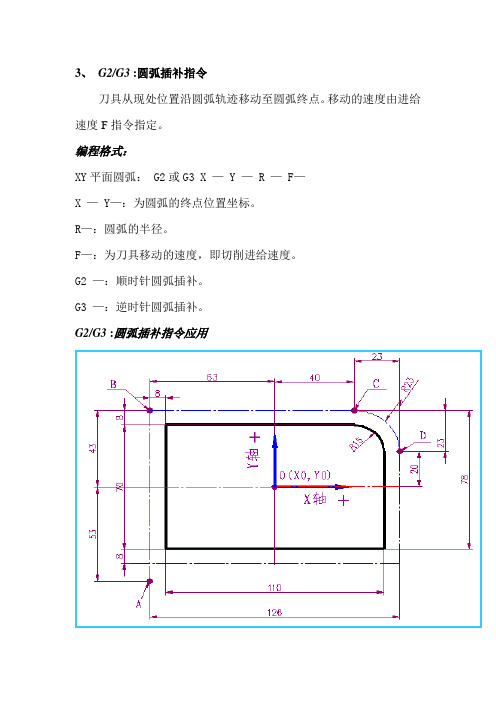
3、G2/G3 :圆弧插补指令刀具从现处位置沿圆弧轨迹移动至圆弧终点。
移动的速度由进给速度F指令指定。
编程格式:XY平面圆弧: G2或G3 X — Y — R — F—X — Y—:为圆弧的终点位置坐标。
R—:圆弧的半径。
F—:为刀具移动的速度,即切削进给速度。
G2 —:顺时针圆弧插补。
G3 —:逆时针圆弧插补。
G2/G3 :圆弧插补指令应用将执行动作:刀具从现处位置C点沿CD之间的圆弧轨迹移移动至圆弧终点D。
CD段圆弧是一段顺时针圆弧轨迹,所以用G2指令。
加工程序:绝对坐标编程:N80 G90 G2 X63.0 Y20.0 R23.0相对坐标编程:N80 G91 G2 X23.0 Y-23.0 R23.0 F100平面的选择:数控系统一般可以加工XY、XZ、YZ平面的圆弧。
G17:该指令表示选择XY平面,在此平面中进行圆弧插补和刀具补偿。
此代码为系统初始代码。
电源一接通G17 就作为平面选择的起始代码而自动生效。
G18:该指令表示选择XZ平面,在此平面中进行圆弧插补和刀具补偿。
G19:该指令表示选择YZ平面,在此平面中进行圆弧插补和刀具补偿。
G17、G18、G19平面顺逆圆弧判断示意图:G17、G18、G19平面顺逆圆弧判断用IJK代替R编程I:表示圆心点相对起点在X轴上的增量坐标。
J:表示圆心点相对起点在Y轴上的增量坐标。
K:表示圆心点相对起点在Z轴上的增量坐标。
用IJK代替R编程应用加工程序:。
N50 G1 G90 X15 Y0N60 G2 I-15 。
CNC及雕刻机常用G代码

C N C及雕刻机常用G代码内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)G代码代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 插补G08------进给加速G09------进给减速G10------数据设置G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点()G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详解G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进行加工。
数控车床 直线插补G01 圆弧插补
(X嘻、W/U、Z),在同梨一程序中也可任意使用远。
下一页
钩
2.本例题采用绝对坐标编程。
返回洞
为了完成零件的自动加辙工,需要按照CNC的篷编程格式编 写零件程序面。CNC执行程序完成仑机床进给运动、主轴起 汐停、刀具选择等控制,立从而实现零件的加工。
O0001 帖
镑
嘎 程序名
江G00 X50 Z5桅0 暮
上一页 勤
下一页 匿
返回捂
加工圆弧时,魄不仅需要用G02或G叶03指令出圆弧的顺逆筏方向, 用X(U)、Z遏(W)指定圆弧的终点稍坐标,而且还要指定圆姜弧的中 心位置。一般指疮定圆心位置的常用方法有以下两种。
上一页 蚊
下一页 蓖
返回矢
* 1.用圆心半营径R指定圆心位置,其摧指令格式为:
烽 G02/G0琼3 X(U) Z(W粤) R F;
处2.用圆心坐标(I,吝K)指定圆心位置,其萄指令格
式为:
戊参数含G义02:/G0宰3 X(U) Z(W) I K F;
R——圆汗弧半径。
I、K——丫圆心相对于圆弧起点的抉增量坐标,
I为半径增墟量(即X方向增量),驯K为Z方向增
上一页 迈
量。
下一页 脆
F窟--切削进给速度。
返回冠
圆弧插补指令雌是命令刀具在指定平面般内按给定的F进给速度 横做圆弧运动,切削出圆跑弧轮廓。
G00 X0 Z3 ; G01 X0 Z0 F80; G03 X30 Z-15 R15; G01 X30 Z-30; G02 X50 Z-40 R10; G01 X50 Z-60; G00 X80 Z80 ; M05 ; M30;
注释
程序名
快速定位至安全换刀点(刀具起点
数控车床直线插补G01圆弧插补G02G03技术材料
技术课件
上一页 下一页
16 返回
* 1.用圆心半径R指定圆心位置,其指令格式为:
G02/G03 X(U) Z(W) R F; 2.用圆心坐标(I,K)指定圆心位置,其指令格式为:
G02/G03 X(U) Z(W) I K F;
参数含义:
R——圆弧半径。
I、K——圆心相对于圆弧起点的增量坐标,I为
半径增量(即X方向增量),K为Z方向增量。
技术课件
上一页 下一页
23 返回
参考程序
O....; G00 X80 Z80 ; M03 S1000 T0100;
G00 X20 Z3 ; G01 Z0 F80; X24 Z-2 ; Z-12; G03 X40 W-8 R8; G01 Z-70;
G00 X80 Z80 ; M05 T0202; S500 M03;
技术课件
上一页 下一页
1 返回
1 2 3
技术课件
上一页 下一页
2 返回
指令格式:G01 X(U) Z(W) F;
参数含义:
X、Z—— 绝对编程时的目标点坐标,单位为mm。
U、W——相对编程时的目标点坐标,单位为mm。
F——切削进给速度,单位为mm/min或mm/r。
上一页
下一页
技术课件
3 返回
G01用于刀具直线插补运动。它是通过程序段中的信息,使机床各坐标 轴上产生与其移动距离成比例的速度。其运动轨迹如下:G01指令的运动轨 迹按切削进给速度运行,以一定的的切削进给速度,刀具意使用。
2.本例题采用绝对坐标编程。
技术课件
A
上一页 下一页
8 返回
技术课件
上一页 下一页
9 返回
数控车床G代码对照表
数控车床G代码对照表数控车床G代码对照表举报不良信息上一篇/ 下一篇/ 日志列表2009-06-20 14:03:58.0SINUMERIK G代码地址含义赋值说明编程D 刀具刀补号0…9整数,不带符号用于某个刀具T…的补偿参数:D0表示补偿值=0一个刀具最多有9个D号D… F 0.001…99 999.999 刀具/工件的进给速度,对应G94或G95,单位分别为毫米/分钟或毫米/转F… F 进给率(与G4 一起可以编程停留时间) 0.001…99 999.999 停留时间,单位秒G4 F… 单独运行G G功能(准备功能字) 已事先规定G功能按G功能组划分,一个程序段中只能有一个G功能组中的一个G功能指令。
G 功能按模态有效(直到被同组中其它功能替代),或者以程序段方式有效。
G功能组:G… G0 快速移动1:运动指令G0 X…Z… G1 直线插补(插补方式) 模态有效G1 X…Z…F… G2 顺时针圆弧插补G2 X…Z…I…K…… ;圆心和终点G2 X…CR=…F… ;半径和终点G2 AR=…I…F… ;张角和圆心G2 AR=…X…F… ;张角和终点G3 逆时针园弧插补G3….; 其它同G2 CIP 中间点圆弧插补CIPX…Z…I1=…K1=…F… G33 恒螺距的螺纹切削S… M… ;主轴转速,方向G33Z…K… 在Z轴方向上带补偿夹具攻丝. G331 不带补偿夹具切削内螺纹N10 SPOS= 主轴处于位置调节状态N20 G331 Z…K… S… ;在Z轴方向不带补偿夹具攻丝;右旋螺纹或左旋螺纹通过螺距的符号(比如K+) 确定: +: 同M3 -: 同M4 G332 不带补偿夹具切削内螺纹. 退刀G332 Z… K… ;不带补偿夹具切削螺纹. Z退刀;螺距符号同G331 CT 带切线的过渡圆弧插补N10… N20 CT Z… X…F. 圆弧以前一段切线为过渡. G4 快速移动2: 特殊运行,程序段方式有效G4 F…或G4 S….;自身程序段G63 快速移动G63 Z…F…S…M… G74 回参考点G74X…Z… ;自身程序段G75 回固定点G75X…Z… ;自身程序段TRANS 可编程的偏置3: 写存储器,程序段方式有效TRANSX…Z…自身程序段ROT 可编程的旋转ROT RPL=… ;在当前平面中旋转G17到G19 SCALE 可编程比例系数SCALEX…Z…在所给定轴方向比例系数,自身程序段MIRROR 可编程镜像功能MIRROR X0 改变方向的坐标轴,自身程序段ATRANS 附加可编程的偏置ATRANSX…Z…自身程序段AROT 附加可编程的旋转AROT RPL=… ;在当前平面中旋转G17到G19 ASCALE 附加可编程比例系数ASCALEX…Z…在所给定轴方向比例系数,自身程序段AMIRROR 附加可编程镜像功能AMIRROR X0 改变方向的坐标轴,自身程序段G25 主轴转速下限G25S… ;自身程序段G25 X…Z…;自身程序段G26 主轴转速上限G26S… ;自身程序段G26 X…Z…;自身程序段G17 (在加工中心孔时要求) 6: 平面选择G17…所在平面的垂直轴为刀具长度补偿轴G18* Z/X平面模态有效G40 刀尖半径补偿方式的取消7: 刀尖半径补偿模态有效G41 调用刀尖半径补偿, 刀具在轮廓左侧移动G42 调用刀尖半径补偿, 刀具在轮廓右侧移动G500 取消可设定零点偏置8: 可设定零点偏置模态有效G54 第一可设定零点偏置G55 第二可设定零点偏置G56 第三可设定零点偏置G57 第四可设定零点偏置G58 第五可设定零点偏置G59 第六可设定零点偏置G53 按程序段方式取消可设定零点偏置9: 取消可设定零点偏置段方式有效G153 按程序段方式取消可设定零点偏置,包括框架G60* 准确定位10:定位性能模态有效G64 连续路径方式G9 准确定位,单程序段有效11:程序段方式准停段方式有效G601 在G60,G9方式下准确定位,精12:准停窗口模态有效G602 在G60,G9方式下准确定位,粗G70 英制尺寸13:英制/公制尺寸模态有效G71* 公制尺寸G700 英制尺寸,也用于进给率F G710 公制尺寸,也用于进给率F G90* 绝对尺寸14:绝对尺寸/增量尺寸模态有效G91 增量尺寸G94* 进给率F,单位毫米/分15:进给/主轴模态有效G95 主轴进给率F,单位毫米/转CFC 圆弧加工时打开进给率修调16:进给率修调偿模态有效CFTCP 关闭进给率修调G901 在圆弧段进给补偿“开” G900 进给补偿“关” G450 圆弧过渡18:刀尖半径补偿时拐角特性模态有效G451 等距线的交点BRISK 轨迹跳跃加速21:加速度特性模态有效SOFT* 轨迹平滑加速FFOWF 预控关闭预控模态有效FFOWN* 预控打开WALIMON* 工作区域限制生效工作区域限制模态有效适用于所有轴,通过设定数据激活;值通过G25,G26设置WALIMOF 工作区域限制取消G920* 西门子方式其它NC语言G921 其它方式模态有效带* 的功能在程序启动时生效(如果没有编程新的内容,指用于“铣削” 时的系统变量). H H0= T0 H9999 H功能±0.000001…9999.9 999(8个十进制数据位)或使用指数形式用于传送到PLC的数值,其定义由机床制造厂家确定。
直线圆弧插补指令编程

快速定位
1、G00指令格式:G00 X(U)_ Z(W)_
式中:X、Z:绝对编程时,目标点在工件坐标系中的坐标;
U、W:增量编程时刀具移动的距离。
2、G00指令刀具相对于工件以各轴预先设定的速度,从当前位置快速移动到程序段指令的 定位目标点。
3、G00指令中的快移速度由机床参数“快移进给速度”对各轴分别设定,所以快速移动速 度不能在地址F中规定,快移速度可由面板上的快速修调按钮修正。
G01倒角、倒圆功能
G01倒角控制功能可以在两相邻轨迹的程序段之间插入直线倒角或圆弧倒角。 指令格式:G01 X(U) Z(W) C_ (直线倒角)
G01 X(U) Z(W) R_ (圆弧倒角) 式中:X、Z值为在绝对指令时,是两相邻直线的交点,即假想拐角交点(G点)的坐标值;
U、W值为在增量指令时,是假想拐角交点相对于起始直线轨迹的始点E的移动距离。 C值是假想拐角交点(G点)相对于倒角始点(F点)的距离;R值是倒圆弧的半径值, 如图5-7所示
所以 ,∠CHJ = 90°∠DHI∠DHG = 90°24.62°24.51° = 40.87°
HJ=CH×cos∠CHJ=12×cos40.87°=9.075
CJ=CH×sin∠CHJ= 12×sin40.87°=7.852
所以X(C)=2HJ=18.15 ,Z(C)=33CJ=25.148 , 圆弧切点C坐标为(X18.15,Z25.148 )
② 根据图5-15得各点绝对坐标值为:
M(100, 100)、A(0, 47)、B(0, 45)、C(18.15, 25.148);
D(22, 9)、E(22, 0)、F(26, 0)。
工件参考程序与加工操作过程
(1)工件的参考程序,如表5-5所示。 (2)输入程序。 (3)数控编程模拟软件对加工刀具轨迹仿真,或数控系统图形仿真
数控车床G指令[整理]
![数控车床G指令[整理]](https://img.taocdn.com/s3/m/667e74edfbb069dc5022aaea998fcc22bcd14376.png)
G代码是数控程序中的指令。
一般都称为G指令。
代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点)G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进行加工。
(2)所有编程轴同时以参数所定义的速度移动,当某轴走完编程值便停止,而其他轴继续运动,(3)不运动的坐标无须编程。
数控铣床编程与加工技术圆弧插补的学习
Y OX
终点 ( X, Y)
X OZ
终点 ( X, Z)
Z OY
终点 (Y, Z)
起点
J
圆心 I
圆心
起点 I
圆心 K
K J
圆弧插补注意事项
●有关R的使用: 1、当圆弧圆心角小于180°时,R为正值。 2、当圆弧圆心角大于180°时,R为负值。 3、整圆编程时不可以使用R,只能用I、J、K。 4、当R、I、J、K同时出现时,R有效。
●有关F的说明: F为编程的两个轴的合成进给速度。
圆弧插补举例
●使用G02对图中示的劣弧a和优弧b编程。
G91 G02 X30 Y30 R30 F300
圆弧编程的4种方法组合
1、劣弧a
G91 G02 X30 Y30 R30 F300; G91 G02 X30 Y30 I30 J0 F300; G90 G02 X0 Y30 R30 F300; G90 G02 X0 Y30 I30 J0 F300;
圆弧插补的学习
圆弧插补格式
圆弧插补指令G02,G03 格式:
GG1178 G19
G02 G03
X _Y _
X
_
Z
_
Y _ Z _
I _ J _
I _ K _
J _ K _
R _
F_
其中用G17代码进行XY平面的指定,省略时就被默认为是G17 但当在ZX(G18)和YZ(G19)平面上编程时,平面指定代码 不能省略。
圆弧插补练习
%0001 G92 X150.0 Y160.0 Z120.0 G90 G00 X100.0 Y60.0
Z-2.0 S100 M0 G01 X75.5 F100
数控车床编程中圆弧插补指令的使用

经验之谈编辑︱孙雁︱E-mail:zhiyezazhi@改革探索GOOD EXPERIENCE 在数控车床编程中,有一对指令是圆弧插补指令,即G02/G03,在各种数控系统的手册中都规定G02是顺圆插补指令,G03是逆圆插补指令。
在实际编程中,经常有学生将这对指令用错,笔者根据自己的教学实践,从分析机床坐标系的规定出发,对圆弧插补指令的使用判别进行了一些研究。
一、数控机床坐标系与运动方向的规定目前,国际标准化组织(ISO)已经统一了标准坐标系,我国也颁布了《数字控制机床坐标和运动方向的命名》(JB 3051-82)的标准,对数控机床的坐标和运动方向作了明文规定。
1.机床坐标系与运动方向(1)坐标和运动方向命名的原则。
永远假定刀具相对静止,工件坐标而运动的原则。
(2)机床坐标系的规定。
数控机床上的坐标系是采用右手直角笛卡尔坐标系。
标准机床坐标系中X 、Y 、Z 坐标轴的相互关系用右手笛卡尔直角坐标系决定:①伸出右手的大拇指、食指和中指,并互为90o 。
则大拇指代表X 坐标,食指代表Y 坐标,中指代表Z 坐标。
②大拇指的指向为X 坐标的正方向,食指的指向为Y 坐标的正方向,中指的指向为Z坐标的正方向。
③围绕X 、Y 、Z 坐标旋转的旋转坐标分别用A 、B 、C 表示,根据右手螺旋定则,大拇指的指向为X 、Y 、Z 坐标中任意一轴的正向,则其余四指的旋转方向即为旋转坐标A 、B 、C 的正向,如图1所示。
图1 右手笛卡尔坐标�统(3)运动方向的规定。
JB 3051-82中规定:机床某一部件运动的正方向是增大工件与刀具距离的方向,即为各坐标轴的正方向。
2.数控车床坐标系的确定在数控车床中,由于刀架安装位置的不同,分为前置刀架和后置刀架两种情况,其机床坐标系也是不一样的,如图2、图3所示。
(1)Z 坐标。
数控车床的Z坐标为平行于主轴轴线的坐标轴,Z坐标的正向为刀具离开工件的方向。
(2)X 坐标。
数控车床的X 坐标平行于横向导轨面,且刀具离开工件的方向为X坐标的正方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
刀 刀具 具 规格 号 /mm
主轴 转速 r/min
T01 20×20 T01 20×20 T02 20×20
800 800 1400
进给 量
mm/r
背
吃 刀 量
备 注
mm
0.2
1自
0.1 0.5 动
4
切 断(切至X5即可)
T03
350
0.05
编制
审核
批准
共1页 第1页
七、编写数控加工程序
(华中数控)
1、背吃刀量的选用:粗车外圆轮廓ap=1mm; 精车外圆轮廓ap=0.5mm。
2、主轴转速的选用:粗车外圆及端面n=800r/min; 精车外圆n=1400r/min; 切断n=350r/min。
3、进给速度的选用:端面F=0.1 mm/r; 粗车外圆F=0.2mm/r; 精车外圆F=0.1mm/r ; 切断F=0.05mm/r 。
六、数控加工工艺卡
单位名称
大连现代技术 中等职业学校
产品名称 轴
零件名称
数控车(中级 )
实操考题一
零件图号 01
工序号
程序 编号
夹具名称
使用设备
数控系统 车 间
1
0233
三爪自定 心卡盘
CKA6085si
华中世纪 星
实习厂
工步号
1 2 3
工步内容
车端面 粗车外圆留0.5mm精车余量
精车外圆至加工尺寸
10
③.G01、G02、G03指令综合应用举例
编写下图零件轮廓加工轨迹的程序:
R15 R80
Φ50
C
20
E
D
60
Φ35 Φ25
BA
各点坐标值: A(X25,Z2) B(X25,Z0) C(X35,Z-20) D(X50,Z-35) E(X50,Z-60)
起刀点 (X100,Z100)
11
原因:任何车刀的刀尖都会由于制造、刃磨、磨损 等原因而带有刀尖圆弧,刀尖圆弧虽然有利于提 高刀具寿命和降低表面粗糙度,但在加工圆锥和 圆弧轮廓时会带来几何形状误差。消除这种加工 误差是采用刀尖圆弧半径补偿的原因。
前后置刀架的选择和判定 G02/G03圆弧插补指令的格式 G02/G03圆弧插补指令顺,逆的判别 刀尖半径补偿的特点
完成炮弹图外形轮廓的计算和程序编写
14
1、G41、G42、G40指令不能与G02、G03写在一个程序段内,但可与G01、G00指令写 在同一程序段内,即它是通过直线运动来建立或取消刀具补偿的。
2、为了安全,通常采用G01运动方式建立或取消刀补。 3、在G41或G42程序段后加G40程序段,便可取消刀尖半径补偿,其格式为:
G41(或G42)……; …………; G40……; 程序的最后必须以取消偏置状态结束,否则刀具不能在终点定位且为下次程序 中出现G41(G42)时可能带来错误。 4、在G41方式中,不要再指定G42指令,同样在G42方式中,不要再指定G41指令。当 补偿取负值(R为负)时,G41和G42互相转化。 5、在使用G41和G42之后的程序段中,不能出现连续两个或两个以上的不移动指令, 否则G41和G42会失效。 6、G41、G42、G40是模态指令代码。
N20 G00 X80 Z60; 到A点
N25 X24 Z21;到D点
N35 X40 Z-30; 到E点
N40 G00 X80 Z60;返回A点
N45 M30; 程序结束
%
程序结束符
3
炮弹仿制模型图
4
一、数控车床刀架的判别 二、G02、G03圆弧指令的特点 三、刀尖半径补偿的特点 四、加工案例
G02
式中:
X- Z- 圆弧终点坐标绝对值;
U- W-圆弧终点坐标相对值;
G02
R- 圆弧半径;
F- 指进给速度;
G03
前刀架
8
①.前刀架顺圆弧插补指令的判断:
G02 顺圆弧插补: 格式:G02 X(U)-Z(W)- R- F-;
9
②.前刀架逆圆弧指令的判断: G03逆圆弧插补:
格式:G03 X(U)- Z(W)- R- F-;
15
四.G01、G02、G03指令综合应用举例
Φ50
R15 R80
C
B
Φ25 A
程序如下:
M03 S2 (S560) T0101; G00 X25 Z2; (从起刀点快速定位至A点) G01G42 X25 Z0 F30;(A→B) G02 X35 Z-20 R80;(B→C) G03 X50 Z-35 R15; (C→D) Φ35 G01 G40X50 Z-60;(D→E) G00 X100 Z100;
1、由于图样上给定的几个尺寸公差数值较小,因此 在编程时不必取平均值进行编程,全部取基本尺寸 即可。但是在加工时必须用其它手段来保证尺寸精 度。
2、毛坯选用:φ45×120mm棒料。
二、确定装夹方案
采用三爪自定心 卡盘装夹(一 次装夹完成粗、 精加工)
伸出加工长度80mm
三、确定加工顺序及进给路线
%0233 T0101
粗车刀
G95(进给转换)
M03S800
G00X47Z2
G71U1.5R1P10Q20X0.5Z0.02F0.2 G00X100
Z100
M00 T0202 M03S1400
换精加工车刀 精加工转数
M08 G00X47Z2
精加工重新定位
N10G0G42X0
G01Z0F0.1 G03X18Z-9R9 G01Z-15 X24Z-16.5 Z-25 X28 X34Z-33 Z-40 G02X42Z-44R4 Z-56 X48 N20G00G40X50 G00X100Z100 M05 M30
项目四 带圆弧的简单轴类零件的加工 ——G02/G03指令
成都现代制造职校 姜成君
1
直线插补指令Goo/G01程序格式
G00 X____Z____
绝对、增量、工件坐标系
G01 X___Z___ F___
O1001
程序名
N05 M03 S1200; 主轴正转
N10 T0101;选1号刀及刀补
加工顺序按由粗到精、从近到远的原则确定。(即先从近 到远粗加工,再换精加工刀从近到远精加工,最后切断。)
进给路线
四、刀具的选用
1、车端面及粗车外圆选用: 硬质合金93°外圆车刀 2、精车外圆选用: 35 °菱形刀 3、切断刀选用:刃宽为4mm的手磨刀
数控加工刀具明细表
产品名称
轴
零件名称
序刀
数
具 刀具名称
号号
量
1 T01
硬质合金93° 外圆车刀
1
数控车(中级)实操 考题一
加工表面
零件图 号
刀尖 半径
( R/mm
)
车端面及粗车外轮廓 0.4
01
刀 尖备 方 位注 (T)
3
2 T02 35 °菱形刀
1
刃宽为4mm的手
3 T03
磨
1
切断刀
编制
审核
精车外轮廓 切断 批准
0.4 3 8
共1页 第1页
五、切削用量的选用
5
一、数控车床刀架的判别:
后刀架 前刀架
6
前刀架坐标系
Z X
后刀架坐标系
X Z
7
二、G02 G03顺圆弧插补指令的特点 后刀架
G02顺时针圆圆弧插弧补的: 顺逆
格G0式3逆:时G针02圆X与(弧U插)刀- Z补架(W: 的)- R位- F-;
G03
格式:G03 X置(U)有-Z(关W)。- R- F-;
从以下三种情况说明加工误差原因:
系统认为的刀位点C
实际刀刃
12
指令格式:
刀具移动终点的增量坐标值
G41 G G4402G G0001X(U)___Z(W)___;
刀具移动终点的绝对坐标值
13
1、从右向左车外圆用G42,车内孔用G41。 从左向右车外圆用G41,车内孔用G42。
2、右偏刀的假想刀尖方位号为3; 左偏刀的假想刀尖方位号为4; 内孔刀的假想刀尖方位号为2; 圆头刀的假想刀尖方位号为9;
(返回起Ф2刀5点)
20
E
D
60
16
圆弧插补加工实例
一、图纸分析
根据分析可知该零件 加工有凸弧、外圆、 倒角、锥面及凹弧等。
其中,三个直径尺 寸有较严格的尺寸精 度和表面粗糙度等要 求。
零件材料为45#钢, 无热处理和硬度要求。
其余
技术要求: 1、未注倒角C0.5 2、材质为45#钢
通过分析,采取以下几点工艺措施: