全电子计算机联锁系统的研发
全电子化区域计算机联锁系统技术方案研究

的基 本状 态变 化 。作为 调 车监控 系统模 拟 测试 平 台 中的一部 分 ,联锁 模拟 模块 在项 目准 备期 ,可 作为 控制 系统 出厂 的测 试工 具 ;在项 目中期 ,可作 为控 制系 统在 实验 室 再 现 现 场 发 生 现 象 的手 段 。到 目
『 31
社 ,9 8 2 19 ,.
主控站 上 位 机 不 能 向被 控 站 下 发 操 作 命
令 ,或 被控 站接 收 到操作 命 令 但 丢 弃该 命
图 1 区域计算机联锁 系统总体结构图
令数据
6. 巾控 制 模 式 下 , 作 命 令 通 过 集 操
[ ] 徐 建国 , 2 张福 祥.车站 计算机联 锁 [ . M] 北京 : 中国铁
道 出 版 社 ,0 56 2 0 ,.
E c mma R c ad Hem ap o n o o n Vl — i r h Ga ih r l R lh J h sn Jh i s
d s u s d i h c e ic s e n t e s h me, a d t eme s r st c iv ei b e c mmu iain a ea s n lz d i ea — n h a u e o a h e er l l o a n c t r loa ay e t s o n h
联锁模拟模块丰富的外接接 口, 也可以方便地 移植 到其 他任 何 以联锁 系统 为外 接 系统作 为调试 接 口进 行使 用 。
参 考 文 献
[ ] D v J Ku l si著 ) 潘爱 民, 国印( ) Vsa C 4 ai . rg nk( . d i 王 译 .i l u
++ 技术 内幕 [ . 4版.北京 : M] 第 清华大 学出版社 ,
铁路车站全电子计算机联锁系统的研究与设计

0引言 国内车站的联锁控制经 历了机械联 锁控制、电
气 集中( 以 6502 为 代 表) 联 锁 控 制 、计 算 机 联 锁 加 继 电器执行控制三个大的发展阶段, 其中, 由机械联锁 发展到 6502 电气集中, 是一次重大的飞跃, 大约是在 70 年代基本完成的。而计算机联锁加继电器执行的控 制系统是从 80 年代后期开 始研究, 90 年代 进行试验 并逐渐批量上道使用。目前国内投入使用的计算机联 锁系统都是从继电电气集中过渡发展起来的, 还都不 是以计算机技术为核心的全电子化联锁系统, 实际上 是 一 种 计 算 机 联 锁 、继 电 器 执 行 的 系 统 。 虽 然 不 同 制 式的计算机联锁系统所保留的继电器数目都较少, 但 都存在维修 、运行及施工 等 方 面 的 问 题 , 难 以 适 应 新 的更高的要求, 并且基础信号设备模拟量监测上也存 在一定问题, 还需单独增加微机监测系统。由兰州大 成自动化工程有限公司设计的全电子计算机联锁系 统, 去掉了执行部分的继电器电路, 代之以智能全电 子执行单元, 很好的解决了以上问题, 实现了控制、监 督、监 测一体化 , 为铁路信号 设 备 的 升 级 做 了 有 益 的 技术积累。
图 3 双 MCU 控制器结构框图
信息上传给联锁机。 ( 2) 道岔执行单元软件设计 道岔执行单元软件采用模块化结构, 主要有: 自
检模块、初始化 模块( 包括 端口初始化 、CAN 初始化、 时钟等) , 道岔命令处理模块、A/D 采样模块等。整个程 序分主程序和中断处理程序。中断处理程序有两个: 一个是 CAN 通讯中断处理程序、一个是转动电流采 集中断采集程序。主程序流程见图 4。
( 2) 提高联锁程序的标准化程度, 使它尽可能不 随车站结构和规模的更改而修改, 这就避免了因修改 联锁程序而可能引入的错误;
城市轨道交通全电子计算机联锁系统的应用研究王爱华
城市轨道交通全电子计算机联锁系统的应用研究王爱华发布时间:2023-06-30T12:53:53.771Z 来源:《中国建设信息化》2023年8期作者:王爱华[导读] 联锁系统是城市轨道交通信号系统的重要系统之一,发挥着重要的作用。
尤其是在城市化进程中,城市的交通问题逐渐暴露出来,而地铁交通的出现有效缓解了现代城市交通的压力,逐渐成为现代社会日常通勤的交通工具。
为保证地铁的顺利运营,保护公众的人身安全,必须加强地铁信号系统的安全保障。
因此,我国必须加强对城市轨道交通联锁系统的深入研究,以促进现代城市轨道的稳定建设。
本文主要研究城市轨道交通联锁系统中的应用步骤,简要分析城市轨道交通联锁系统的相关概念,正确认识和认识城市轨道交通联锁系统对现代交通行业的重要性。
身份证号:45020519820920XXXX摘要:联锁系统是城市轨道交通信号系统的重要系统之一,发挥着重要的作用。
尤其是在城市化进程中,城市的交通问题逐渐暴露出来,而地铁交通的出现有效缓解了现代城市交通的压力,逐渐成为现代社会日常通勤的交通工具。
为保证地铁的顺利运营,保护公众的人身安全,必须加强地铁信号系统的安全保障。
因此,我国必须加强对城市轨道交通联锁系统的深入研究,以促进现代城市轨道的稳定建设。
本文主要研究城市轨道交通联锁系统中的应用步骤,简要分析城市轨道交通联锁系统的相关概念,正确认识和认识城市轨道交通联锁系统对现代交通行业的重要性。
关键词:城市轨道;交通联锁系统;讨论和选择引言对全电子联锁和计算机联锁系统的发展、系统结构和特点进行对比分析表明:与计算机联锁系统相比,全电子联锁系统在故障排除、日常维护、空间占用、系统扩展等方面效率更高.具有很大的优势,可以克服计算机联锁系统存在的占用空间大、维护工作量大、维护难度高等问题。
近年来继电器价格上涨,也导致投资成本增加,而采用全电子联锁系统在一定程度上节省了大量人力物力,有利于节约资源。
1现状分析随着我国城市轨道交通的快速发展,对城市轨道交通信号系统联锁子系统技术人才的迫切需求得不到满足,对于城市轨道交通车站内外的导航技术,目前国内外车站的定位通常是通过无线通信技术(Wi-Fi)和蓝牙技术实现的。
全电子计算机联锁的发展与规模化应用

全电子计算机联锁的发展与规模化应用作者:陈亮来源:《科技视界》2020年第15期摘要本文结合全电子联锁的发展历程,总结了全电子联锁的特点,对当前全电子联锁规模化推广应用进展比较缓慢的原因进行了分析,阐述了全电子化后对传统计算机联锁的工程范围、施工调试、维护管理等各方面的影响。
关键词全电子计算机联锁;联锁系统中图分类号: U284.362 ; ; ; ; ; ; ; ; ; ; ; 文献标识码: ADOI:10.19694/ki.issn2095-2457.2020.15.004AbstractCombined with the development of full-electronic interlocking, this paper summarizes the characteristics of full-electronic interlocking, analyzes the reasons for the slow progress of the popularization and application of full-electronic interlocking on a large scale, and expounds the influence of full-electronic interlocking on the project scope, construction commissioning,maintenance management and other aspects of traditional computer interlocking.Key WordsFull-electronic Computer Interlocking System1 全電子计算机联锁发展历程铁路信号技术最早可以追溯到1841年英国采用的臂板信号机,在1856年出现了机械联锁装置,随后经历了一个漫长的发展过程,于1978年在瑞典哥德堡开通了第一个计算机联锁车站[1]。
全电子计算机联锁系统的研发

开 关 。S R 输 入 端 要 求 很 小 的 控 制 电 流 ,能 与 S
1 1、H L MO r I L T 、C S等 集 成 电路 较 好 地 兼 容 ;而 输
图 1 主 控 站 全 电子 联 锁 系统 结 构
备 机还 同时接 收全 电子 系统采集 的室 外设备 状 态信 息 ,同时对接 收 的信息进 行 比较 ,验 证一 致后 由通
信主机 发送 到主控 站主机 系统 ,不 一致 时发送 安全 侧信 息至 主控站 。
在 上述 建议 的结构 中 ,全 电子 的接 口系统 根据 功能分 别配 置 ,如道 岔接 口板 、信 号机 接 口板 、轨 道 电路采集 接 口板 以及零散 电路 接 口板 等 。为保证 系统 安全 、可靠 运行 ,全 电子板 采集 、驱 动 电路 与
一
室 内计 算机设 备 的电气 隔离 ,防止 雷 电 、牵 引 电流 及 其 他 外 部 电 源 对 联 锁 主 机 或 通 信 主 机 系 统 的
影 响
2 一
RAI WAY I NAL I L SG L NG & C OMMU C NI AT 0N V 1 4 No 1 2 1 1 o. 8 .0 02
lc i g s s msa e h r o b s d o e s a S o k n y t r a d t e u e v r e . o,t e eo ih y r l b e w o e e e t n c i tr c e o d v l p a h g l ei l h l lcr i n ef e a o a s b y t m ,wh c s c mp id w t eS I sa d r sa d s i b e frl n itn e s ft o t l si - u ss e ih i o l i t IA tn a d n u t l o g d s c a ey c n r ,i n e h h a o a o
全电子计算机联锁系统架构与关键技术研究

0 引言计算机联锁系统是保障行车安全的重要技术装备。
为了不断提高轨道交通系统的运营效率,改善劳动条件,必须保证计算机联锁系统的良好运行。
随着功率电子学、传感器与自动检测技术、通信技术和自动控制技术的发展,全电子模块应运而生。
全电子模块可代替既有计算机联锁系统中的继电器执行电路对室外信号设备进行控制,具有节省设备空间、简化施工配线、规模扩展灵活、易于故障处理等优点,较好地克服了继电器执行电路结构复杂、配线易发生混线和混电问题、排除故障难度大等不足[1-4]。
全电子模块与既有计算机联锁系统的主控逻辑部分结合构成的计算机联锁系统即为全电子计算机联锁系统。
我国铁路“十一五”技术装备政策已提出要发展全电子计算机联锁系统。
同时,从国外计算机联锁发展趋势看,全电子计算机联锁目前是各厂家的主流装备,因此继电执行电路的全电子化是计算机联锁发展的必由之路[5]。
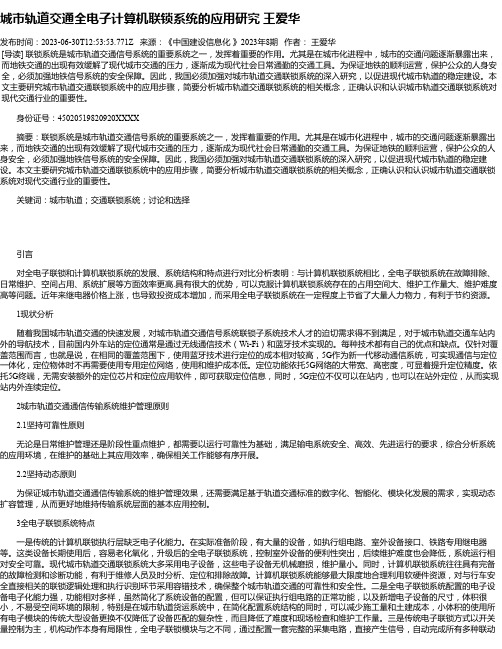
1 全电子计算机联锁系统架构全电子计算机联锁系统由3部分组成,分别为人机界面层、逻辑层和执行层,其架构见图1。
全电子模块直接控制信号设备;智能电源屏采用N+1并联均流冗余电路结构,按照不同容量和不同要求分回路为人机界面层、逻辑层和执行层的设备供电;外部通信接口实现计算机联锁与其他设备(如区域控制器ZC、自动列车监控系统ATS等)之间的通信。
人机界面层由控显机和监测机组成。
控显机的主要功能是用于站场图形实时显示和车站值班员进行操作;监测机的主要功能是用于系统运行状态以及现场操作、信号设备动作的记忆、查询、再现、打印等,为电务维护人员提供良好的操作界面。
逻辑层由安全计算机平台主控单元组成,主要功能是完成联锁软件的逻辑运算,通过标准通信总线向全电子模块的通信单元下发信号设备控制命令,同时实时采集全电子模块和信号设备当前的状态数据信息。
执行层由全电子模块组成。
在跨座式单轨交通系统中,主要运用到的模块包括信号机模块、安全输入模块、安全输出模块、单轨道岔控制器和其他接口模块(如通信转换接口模块等)。
计算机联锁系统的发展概况

我国计算机联锁系统的发展概况一、概况自20世纪70年代以来,由于微型计算机的问世以及容错技术的发展,一些发达国家相继着手研究计算机联锁系统。
直接原因是期望以通用的集成电子技术取代专用的继电器电路。
这样既降低了元器件的造价,又节省了继电器的维修费用。
于1978年在瑞典首先使用了计算机联锁系统。
此后,美、日、英、德等国家也开发出并使用了计算机联锁系统。
有的国家如日本,自80年代初就停止新建继电联锁系统而代之以计算机联锁系统。
在我国,第一套计算机联锁系统由铁道部通号公司于1984年研制成功并在矿山铁路投入使用。
铁道科学研究院研制的计算机联锁系统于1989年装于郑北编组站峰尾使用。
经过多年的研究改进,计算机联锁设备逐步在我国铁路正线上使用。
铁道部1994年发布的《铁路主要技术政策》中提出“积极采用微机联锁设备”。
根据几年的经验,在“九五”期间铁道部提出积极稳妥地发展计算机联锁设备的政策,并在“九五”的后期针对计算机联锁系统发展中存在的问题进行了整顿,制定了规范管理的措施。
经过审查,明确指定铁道科研院通号所、通号公司研究设计院、北方交通大学“北京微联公司”和通号公司的卡斯柯信号公司4家为计算机联锁系统的研制生产单位;指定上海通信工厂、北京信号工厂、沈阳信号工厂和成都通信工厂为计算机硬件生产厂家。
自整顿后,使我国的计算机联锁设备的开发使用进入到了健康有序的发展阶段。
到2000年底,全国铁路(不包括矿山铁路)已装备了447个车站的计算机联锁设备。
二、计算机联锁系统的优点(一)提高了联锁设备的安全性和可靠性1.安全性。
联锁设备的安全性体现在两个方面:一是功能方面的安全性。
例如,在6502电气集中设备中,当列车在运行过程中,若它的前方的轨道电路发生故障,此时值班人员又误办理了“故障解锁”操作,有可能造成列车在道岔处脱轨或进入异线的危险后果。
全电子联锁系统运用研究

全电子联锁系统运用研究摘要:计算机联锁系统已经在轨道交通信号系统广泛普及应用,电子执行单元有着体积更小、功能更强、后期便于维护等优势,将传统的继电器组合电路用全电子执行单元替代,是计算机联锁系统的发展趋势。
本文介绍了全电子计算机联锁系统架构、模块特点和网络设计。
关键词:计算机联锁;全电子;执行单元我国的信号联锁主要经历了三个大的发展阶段,分别是机械联锁、电气集中联锁(以6502为代表)、计算机联锁。
最初由机械联锁发展到6502电气集中联锁,从80年代开始研究计算机联锁加继电器执行的系统,90年代进行试验并逐渐批量上道使用。
目前国内的计算机联锁系统主要是继电器执行电路加计算机联锁的系统。
全电子计算机联锁采用通信、电子信息、自动检测等技术实现车站联锁。
该系统将继电器执行部分和逻辑判断相融合,实现对信号室外设备的控制和采集;同时实现了控制监测一体化,将道岔动作电流、信号机灯丝电流等模拟量采集功能也纳入其中,实现了对现场信号设备的监测功能。
1系统架构全电子计算机联锁系统可按层次划分为人机会话层、联锁逻辑层、执行层以及室外设备。
传统的计算机联锁设备在执行层包括:I/O机柜、接口柜、组合柜和防雷分线柜;全电子系统的核心联锁逻辑功能不变,将I/O机柜、接口柜、组合柜集成为执行单元。
图1-1 系统架构对比图各种全电子执行单元构成执行层,通过取代传统计算机联锁系统中的输入输出板和继电器执行电路,与联锁主机相结合,实现末级控制和采集功能。
全电子联锁系统采用双CPU“二取二”的工作方式,联锁逻辑层中联锁计算机通过安全通信方式输出控制命令到执行单元,完成对信号室外设备的控制和监测。
通过全电子单元实现系统的智能化、数字化、模块化,有效保障运营安全和监测维护。
2传统计算机联锁与全电子计算机联锁对比2.1传统计算机联锁传统计算机联锁系统采用继电器,联锁逻辑电路由计算机控制,执行组电路保留了电气集中的执行电路,包括信号机点灯电路、道岔启动电路、轨道电路、各种联系电路等继电电路,这些电路经过几十年的改进,其可靠性和抗外界冲击性能已很成熟,为保证行车安全起到了很好的作用,计算机联锁内部电路也随着大量的工程应用日益完善、稳定性不断提高。
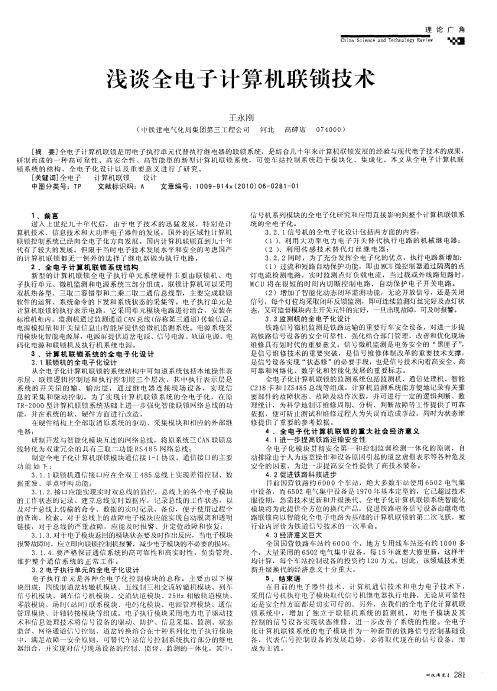
浅谈全电子计算机联锁技术
酥i丽
丽; w
a
浅 谈 全 电子 计 算 机 联 锁 技 术
下 _ 永 川
(吖铁 建 电 气 化 局 集 团 第 三 : 程 公 司 河 北 高 碑 店 1 [ 0 40 7 0 0)
[ 要 ] 电子 计 算 机 联 锁 是 用 电 子 执 行 单 元 代 替 执 行继 电 器 的 联 锁 系统 ,是 结 合 几 十年 来 计 算 机 联 锁 发 展 的 经 验 与 现 代 电 子 技 术 的 成果 , 摘 全 研 制 而 成 的 一 种 高 可 靠 性 、 高 安 全 性 、 高 智 能 型 的 新 型 ‘ 机 联 锁 系 统 ,可 使 车 站 控 制 系 统 趋 于 模 块 化 、 集 成 化 。 本 文 从 全 电 子计 算 机 联 t 算
1、 前 言 进 入 上 世 纪 九 十 年 代 后 , 由 于 电 了技 术 的 迅 猛 发 展 ,特 别 是 计 算机技术、信息技术和 _ 功率 电子 器什 的发展 ,国外 的区域性计算机 人 联 锁 控 制 系 统 已经 向全 电 子 化 方 向 发 腮 。 国 内计 算 机 联 锁 直 到 九十 年 代 有 了 较 大 的 发 展 。但 限 于 当 时 电子 技 术 发 腱 水 平 和安 全 的 考 虑 固 产 的 计 算机 联 锁 都 无 一 例 外 的 选 择 了 继 电 器 做 为 执 行 电路 。 2、全 电子 计 算 机联 锁 系统 结 构 新型的计 算机联 锁全 电子执行 单元 系统 硬件主 要 由联锁机 、 电 子执行单元 、微机监测 和电源系统三 部分组成 。联锁计 算机可 以采用 双 机 热 备 型 、 三 取 = 容 错 型 和 二 乘 二 取 二 通 信 总 线 型 , 主 要 完 成 联 锁 : 软 件 的 运 算 、 系 统 命 令 的 F发 和 系 统 状 态 的 采 集 等 。 电 子 执 行 单 元 是 计 翁: 联 锁 的 执 行 表 示 电 路 ,它 采 用 单 元 模 块 电路 进 行 组 合 , 生 装 在 机 标 准 机柜 内 。 舱测 机 通 过 髓测 通 道 C N总 线 ( 称 第三 通 道 ) 输 信 息 。 A 俗 传 电源 模 拟 量 和 开 关 量 信 息 山 智 能 屏 提 供 给 微 机 测 系 统 。 电 源 系 统 采 用 模 块化 智 能 电源 屏 ,电源 提 供 道 岔 电 源 、信 号电游 、轨道 电 源 、电 码 化 电源 和 联锁 机 及 执 行 机 系 统 电源 。 3 、 计 算 机 联 锁 系 统 的 全 电 子 化 设 计 3 1联 锁 机 的 全 电子 化 设 计 从伞 电子化 计算机联锁 的系统结构 中可 知道 系统包括本地操 作表 示 层 、 联 锁 逻 辑 控 制 层 和 执 行 控 制 层 三 个 层 次 ,其 中 执 行 表 示 层 是 系 统 的 开 关 量 的 输 、 输 出 层 , 通 过 继 电 器 连 接 现 场 设 备 , 丈 现 信 息 的 采 集 和 驱 动 拧 制 。 为 了 实 现 计 算 机 联 锁 系 统 的 全 电 子 化 , 在 原 T 一 0 0型 计 算 机 联 锁 系 统 基 础 l 一 步 强 化 智 能 联 锁 络 总 线 的 功 R 20 进 能 ,并 在 系统 的 软 、 硬 件 方 面 进 行 改 造 。 在 硬件 结 构 上 个 部 取 消 原 系 统 的 驱 动 、采 集 模 块 和 相 应 的 外 部 继
关于二乘二取二的全电子计算机联锁系统的研究

操 作 、维 护 和 其他 系统 相 互 间的 通信 。监 控 机 由荣 誉 工 业控 制 计 算 机 联锁计算机传输信号的状态。通常使用“二取二”和逻辑控制结构实
组 成 ,利用 以太 网和 联 锁 计 算 机 ,实 现相 互 之 间通 信 。监 控 机 虽 然 是 现 自检 、容错 和冗余功能 。
1系统 结构
出的信号进行 比较 ,进一步输出一致性结果 给冗余 热设备 的RCN。 I/F具有独立 的系统间接接 口,任何一个接 口发生故 障,系统都会切
全 电子 计 算机 联 锁 系统 结 构 层 主 要 由 操作 层 、安 全 联 锁 逻辑 层 入 到 另 一 个 接 口实 现 数 据 输 入 输 出 。
热设 备 以太 网 中 的 CPU数 据 。为 了保 证 信 息 的 安 全 可 靠 ,可 以在 两 套联 锁主机 中,使用 高速 光通道实现信息交换 ,进一步进行 命令 处
全 电子可以实施 自动保护,相应主机命令,对信号设备进行作用 ,降 低现场维护工作 。全 电子执行单元能够实现 电子单元功能 。可 以模
单元 组成。每个联锁计 算机都有两套 比较独立的 CPU组成 ,可 以在 路形式 ,可 以将其划分为交流轨道 电路和25周相敏轨道 电路模块
独立编译联锁环境 中运行 。可 以利 用监控机的操作命令 ,处理冗余
全 电子 执 行 单 元 可 以控 制 电 路 中 的 过 流 ,当 电 路 出 现故 障 时 ,
机 接 口。二 乘二 取 二联 锁 计 算机 由冗余 光 纤 、冗余 热 设备 和联 锁 主机 组 成 。独 9,-CPU处理 器 、总线硬 件 控 制器 、硬 件控 制 器 、硬 件 同 步控制 器全
局 冗余 时钟和 光 纤通信 等组 成 了CPU主板 。利 用 同步控制 器、总线控 制和软 件 时间点控 制,可 以实现 同步机制 。全 电子执行 主要 利用“二 乘二取 二 ”
全电子模块化计算机联锁系统探讨的论文-计算机应用论文

全电子模块化计算机联锁系统探讨的论文计算机应用论文摘要:目前,中国铁路上千个车站已经装备了计算机联锁系统,计算机联锁成为了以后改建、新建铁路的主要信号联锁控制方式。
文章主要提出一种全电子、模块化的计算机联锁系统,并对计算机联锁以后的发展趋势进行了分析,希望随着计算机技术和电子制造技术的发展,全电子模块化的计算机联锁系统成为信号专业联锁系统的发展方向。
关键词:全电子;模块化;三取二;计算机联锁中国从1984年开始研制计算机联锁系统,目前,其作为铁路运输核心安全控制系统,取代了原有6502电气集中,但是随着计算机联锁系统大规模发展的同时也暴露出越来越多的问题。
由于很多计算机联锁系统保留了近30%的继电电路,结构复杂,占地面积大,接线多、焊点多、导致故障率高,抗干扰能力弱,同时联锁软件出于对知识产权保护的考虑,是完全封闭的,对联锁软件的正确性、安全性、不能深入控制。
软件测试工作也只是局限于功能测试、黑箱测试,测试功能范围都不可能穷尽。
1 计算机联锁的发展要求及发展方向1.1 计算机联锁的发展要求为保证铁路运输的跨越式发展,充分发挥铁路信号工厂、工程设计单位、专业施工单位、电务维修单位的作用,在保证其基本安全条件的基础上,让计算机联锁系统成为多级单位广泛参与,共同实现的开放式联锁设备。
计算机联锁系统的理想状态就是:①完全的工厂化生产;②完全的标准化设计;③最简化的现场施工;④最简化的验收模式;⑤最简化的维护办法;⑥最简化的维修手段;⑦最简单的二次开发以至于免二次开发;⑧完备的设备参数监测功能;⑨满足铁路行车自动化的接口功能。
1.2 计算机联锁的发展方向1.2.1 二乘二取二系统中国目前的计算机联锁制式主要有:双机热备、三取二和二乘二取二系统。
双机热备系统存在双机切换问题,切换失败将产生严重的危险后果;采用屏蔽冗余技术的三取二系统,虽然产生危险输出的可能性极小,但是存在不能停机检修的问题;所以今年主要干线的技术改造和新建铁路都优先考虑二乘二取二系统,二乘二取系统也是计算机联锁以后的发展趋势。
计算机联锁控制系统的研究与发展趋势

计算机联锁控制系统的研究与发展趋势【摘要】随着科技进步,电气联锁系统正被计算机联锁系统取代。
文章介绍和分析了国内计算机联锁运用的现状和存在的问题,从容错技术方面讨论了容错的一般方法和在计算机联锁系统中的应用。
描述了国产计算机联锁的发展概况,探讨了计算机联锁系统的发展趋势。
【关键词】计算机联锁系统;故障-安全;容错;嵌入式系统1.引言目前的计算机联锁系统主要是双机热备系统,这种系统在长期应用和发展中已经暴露出许多软件和硬件设计上的缺陷。
随着火车的提速、客运专线、大型客运站、重点车站、重载线路的建设和改造,对于计算机联锁系统的可靠性、安全性提出了更高要求,以便适应铁路跨越式发展形式的需要。
2.中国计算机联锁系统现状随着计算机软硬件技术的高速发展,按照引进、消化、提高的技术方针,中国的联锁机从最初的通用单板机发展到目前的联锁专用计算机,安全性、可靠性有了大幅度的提高,功能得到加强。
计算机联锁也由少量运用发展成为铁路车站信号联锁的主力设备,铁路干线车站联锁基本上全部实现了计算机联锁控制。
目前的主流机型是硬件专门为铁路车站联锁功能设计的专用安全型联锁计算机。
3.国内计算机联锁系统3.1 双机热备联锁双机热备联锁机在设计中采用多种方法来提高安全性和可靠性。
软件采用两个不同设计方法的联锁软件保证可靠性和安全性。
硬件采用动态电路提高安全性,采用热备冗余机制提高可靠性。
硬件的安全性是靠设备的可靠性和反馈监测,靠输出结果的事后反馈保护来保证。
软硬件产生错误的反馈、硬件错误的判断及防护电路启动、错误输出结果的纠正都需要一定的时间。
虽然错误结果输出时间很短,只是瞬间,概率也较低,但是安全性相对较低。
所以,双机热备型联锁机不能运用于繁忙的干线铁路和运行速度较高的铁路区段,只能运用于支线和厂矿企业车流密度较小、运行速度较低的铁路区段。
3.2 三取二容错联锁容错型计算机联锁系统选用Linux作为系统的运行环境,使用C语言、GTK+/GNOME函数库、RTLinux函数库以及GCC编译器进行系统软件的开发。
计算机联锁系统的研究(1)
计算机联锁系统的研究(1)⽬录绪论 (1)第⼀章计算机联锁综述 (2)第⼀节计算机联锁的基本概念 (2)第⼆节计算机联锁系统的功能、优越性 (3)第⼆章计算机联锁系统的原理和相关技术 (7)第⼀节计算机联锁系统的原理 (7)第⼆节计算机联锁的可靠性保障技术 (10)第三章市场现有联锁系统及其发展 (15)第⼀节双机热备配置的微机联锁系统 (15)第⼆节我国微机联锁的现状与前景 (20)结束语 (23)参考⽂献 (24)绪论计算机联锁(computer interlocking)是以计算机技术为核⼼,采⽤通信技术、可靠性与容错技术以及"故障——安全"技术实现铁路车站联锁要求的实时控制系统。
利⽤计算机对车站作业⼈员的操作命令及现场表⽰的信息进⾏逻辑运算,从⽽实现对信号机及道岔等进⾏集中控制,使其达到相互制约的车站联锁设备,即微机集中联锁。
计算机联锁始于1978年在瑞典哥德堡投⼊运⽤,进⼊20世纪80年后,美、⽇、英、法,德国、丹麦、荷兰等国进⼊试验阶段或开始使⽤,各国在系统上各有不同的⽅案。
1984年中国铁道部通信信号公司开发出中国第⼀台计算机联锁,此后取得迅速进展,截⾄1995年底中国铁路及⼚矿企业使⽤计算机联锁的车站已有47个。
随着计算机技术的迅速发展,尤其是对于可靠性技术和容错技术的深⼊研究,计算机联锁技术已⽇趋成熟,在⼤⼒推⼴使⽤。
根据各国对计算机联锁的研究和使⽤情况来看,由于计算机在逻辑功能和信息处理⽅⾯具有很强的功能,它⾮常适⽤于车站联锁。
计算机联锁是⽤微型计算机和其他⼀些电⼦、继电器件以及各种计算机软件组成的具有故障——安全性能的实时控制系统。
随着计算机技术的迅速发展,尤其是对于可靠性技术和容错技术的深⼊研究,计算机联锁技术已⽇趋成熟,在⼤⼒推⼴使⽤。
根据各国对计算机联锁的研究和使⽤情况来看,由于计算机在逻辑功能和信息处理⽅⾯具有很强的功能,它⾮常适⽤于车站联锁。
计算机联锁是信号设备采⽤微机的重要突破⼝,它的研制成功和推⼴使⽤使铁路信号⾃动控制进⼊了⼀个新的阶段。
全电子化计算机联锁系统RAMS设计考虑

3 )出于 对知 识产权 保护 的考虑 ,联 锁软件 是完
全 封 闭的 ,对 于其 正确性 、安 全性 不能深入 控制 。 软 件检 测工 作只是 局 限于功 能检测 、黑箱 检测 、
方 案 【 .铁 路 通 信 信 号 工程 技 术 ,2 1()8 . J ] oo1:—1 1
s s m. i.eibly a albl , itia it n aeyo tes se Ii x e tdta eflee t nc y t vz rl it,v i it ma an bl a dsft fh tm.tse p ce th l lc o i e a i a i y n i y y h t u r
c mpu e - s d i t ro ki yse wilbe t e d v l pi r nd oft e c mpu e - s d i t ro ki g o t rba e n e l c ng s t m l - h e e o ng te h o t rba e n e l c n - s se a o g wiht e e o y t m l n t d v lpme to o h c mp t rt c no o y a d e e to cma f c u i e h ol g . he n fb t o u e e h l g n lc r ni nu a t rng tc n o y Ke wo ds u l l cr n c c mpu e - s d i e l c ng s tm ; y r :f lee to i ; o trba e ro ki yse RAM S e i n nt ;d sg
基于CAN的全电子计算机联锁系统设计

基于CAN的全电子计算机联锁系统设计海小娟【摘要】联锁软件在计算机联锁系统中起到着核心作用,即专门负责执行联锁运算.计算机联锁系统平台如果在运行工作的过程中出现故障或者系统功能失效,极有可能会引发列车相撞事故.故此,保障计算机联锁系统软件的可靠性是该领域发展建设、研究设计的一项重大课题.本文重点探讨分析CAN总线通信技术在全电子计算机联锁系统设计中的应用,以铁路车站分布式计算机联锁系统为背景,采用二级CAN总线架构模式和排队机制,结合列车信号机电灯电路的功能和控制技术条件来进行.提出相关的设计方法,以期对相关软件的研发起到参考作用.%Interlocking software plays an important role in the computer interlocking system,which is specially responsible for the implementation of interlocking operation.Ifthe failure of the computer interlocking system platform in the process of running or the failure of the system function,it is very likely to cause the train collision.Therefore,to ensure the reliability of computer interlocking system software is an important subject in the field of development and research and design.This paper focuses on the analysis of the applicationof CAN bus communication technology in the design of full electronic computer interlocking system in the railway station,the distributed computer interlocking system as the background,using two CAN bus architecture model and queuing mechanism,combined with the train signal lamp circuit function and electromechanical control technology terms.The related design method is proposed,in order to provide reference for the development of related software.【期刊名称】《电子设计工程》【年(卷),期】2018(026)007【总页数】4页(P18-20,26)【关键词】CAN;计算机联锁系统;安全性;信号模块【作者】海小娟【作者单位】西安文理学院信息工程学院,陕西西安710065【正文语种】中文【中图分类】TP302对于铁路车站信号设备及其相关控制系统的布置设计而言,安全性永远是排在首位的,也是最需要关注的重点内容。
CTCS-3级全电子计算机联锁系统研究

CTCS-3级全电子计算机联锁系统研究CTCS-3级全电子计算机联锁系统研究引言:随着信息技术的迅猛发展,全电子计算机联锁系统在铁路运输领域发挥着重要的作用。
作为一种现代化的铁路信号系统,CTCS-3级全电子计算机联锁系统具有高度集成、精确可靠、安全保障等优势,已进一步提升了铁路运输的安全性和运行效率。
本文将对CTCS-3级全电子计算机联锁系统进行深入研究。
一、CTCS-3级全电子计算机联锁系统的概述CTCS-3级全电子计算机联锁系统是基于计算机技术的铁路信号系统,其主要功能是实现列车运行的确保和控制。
该系统采用全电子技术,通过高速计算机进行列车位置、信号灯状态等信息的读取和处理,并通过联锁设备实现列车信号的控制,进一步保障列车的运行安全。
二、CTCS-3级全电子计算机联锁系统的工作原理CTCS-3级全电子计算机联锁系统主要由计算机、联锁设备以及信号设备等组成。
系统首先通过传感器和探测器获得列车位置、速度等信息,然后将数据传输给计算机进行处理。
计算机根据预设的联锁规则,对列车的运行进行监控和控制。
一旦发现列车运行存在异常或安全隐患,计算机会自动发出警报并采取措施,例如控制信号灯的状态以减速或停车列车。
三、CTCS-3级全电子计算机联锁系统的特点1. 高度集成:CTCS-3级全电子计算机联锁系统集成了多种功能,能够同时处理多个列车的信号和控制信息,减少了设备和空间的占用。
2. 精确可靠:系统通过高精度传感器和计算机进行数据处理,保证了列车位置和速度的准确性,提高了系统的可靠性。
3. 安全保障:CTCS-3级全电子计算机联锁系统通过联锁设备对列车信号进行控制,能够即时发现和解决列车运行中的安全问题,确保列车运行的安全性。
4. 运行效率高:全电子计算机联锁系统的自动化程度高,减少了人工操作和介入的次数,提高了列车调度和运行效率。
四、CTCS-3级全电子计算机联锁系统的优势1. 提升列车运输安全性:CTCS-3级全电子计算机联锁系统通过实时监控和控制,能够及时发现和解决列车运行中的安全问题,避免了事故的发生。
全电子计算机联锁的发展与规模化应用

全电子计算机联锁的发展与规模化应用陈亮摘要本文结合全电子联锁的发展历程,总结了全电子联锁的特点,对当前全电子联锁规模化推广应用进展比较缓慢的原因进行了分析,阐述了全电子化后对传统计算机联锁的工程范围、施工调试、维护管理等各方面的影响。
关键词全电子计算机联锁;联锁系统中图分类号:U284.362文献标识码:ADOI:10.19694/ki.issn2095-2457.2020.15.004陈亮1975—/男/汉族/上海人/本科/高级工程师/主要从事铁路信号/卡斯柯信号有限公司(上海200071)AbstractCombined with the development of full-electronic interlocking,this paper summarizes the characteristics of full-electronic interlocking,analyzes thereasons for the slow progress of the popularization and application of full-electronic interlocking on a large scale,and expounds the influence of full-electronic interlocking on the project scope,construction commissioning, maintenance management and other aspects of traditional computer interlocking.Key WordsFull-electronic Computer Interlocking System1全电子计算机联锁发展历程铁路信号技术最早可以追溯到1841年英国采用的臂板信号机,在1856年出现了机械联锁装置,随后经历了一个漫长的发展过程,于1978年在瑞典哥德堡开通了第一个计算机联锁车站[1]。
全电子联锁系统开发与应用研究

全电子联锁系统开发与应用研究发布时间:2023-01-16T08:46:37.078Z 来源:《科学与技术》2022年第16期8月作者:林震宇[导读] 近年来,随着城市轨道交通技术的飞速发展,市场对CBTC系统的自动化和集成要求越来越高。
林震宇身份证号:36072219930323****摘要:近年来,随着城市轨道交通技术的飞速发展,市场对CBTC系统的自动化和集成要求越来越高。
综合电子联锁系统以其系统结构简单、处理速度快、运行维护方便、建设投资少等特点越来越受到业主的青睐。
全电子联锁CBTC系统的市场需求日益迫切。
本文分析了综合电子联锁系统的技术特点,研究和设计了综合电子联锁系统的结构、采集和驱动过程。
关键词:全电子联锁系统;开发;应用1全电子联锁系统技术特点1.1传统联锁系统传统的联锁系统仍采用道岔控制电路、信号机照明电路、轨道电路等继电器电路对室外道岔、信号机、轨道电路等信号设备进行控制。
继电器回路结构复杂,人为接线较多,存在接线混断等隐患,可能导致室外信号设备无法控制。
当发生故障时,需要人工检查线路,确定故障位置,排除故障原因,这对维修人员的专业素质提出了很高的要求,同时也造成了大量的维修工作和人力资源的消耗。
此外,中继成本高,设置中继的组合框架占据了信号机房的很大一部分面积,增加了城市轨道交通的建设成本。
因此,传统的联锁系统很难适应现代城市轨道交通的发展。
1.2全电子联锁系统综合电子联锁系统是新一代信号控制联锁设备。
本系统采用计算机控制技术、电力电子开关技术、计算机通信、自动检测等先进技术实现电子联锁设备。
与传统的继电联锁系统相比,综合电子联锁系统采用电子执行单元实现与室外道岔、信号机、轨道电路等信号设备的直接接口。
电子执行单元体积小,功能强大,易于组网。
它可以为CBTC系统的自动化和信息化提供基础信息、远程管理和远程诊断。
电子执行单元取代传统的继电器电路,实现对外部信号设备的控制,只保留少量的外部接口接线,降低了线路混用和断线的风险。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
专业知识分享版使命:加速中国职业化进程摘要:随着计算机联锁系统在高速铁路、地铁系统广泛应用,采用继电器接口控制室外设备的联锁系统也在高速铁路区域联锁、地铁项目集中控制技术中应用,而远距离非集中站室外设备控制需要大量电缆加芯,同时,由于国内安全型继电器不满足欧洲标准,难于在海外推广,这些都将迫使计算机联锁系统在结构及控制接口方面进行改进与提高。
因此,研发高可靠性、满足SIL4 标准、适合远距离安全传输与控制的全电子输入输出接口系统,是计算机联锁系统必须进行的一次技术变革。
关键词:计算机联锁; 全电子; 故障-安全计算机联锁系统经过多年的应用与改进,其可靠性、可用性、可维护性及安全性 ( RAMS) 已完全满足国内铁路系统的要求,但基于一定安全性的考虑,其室外设备接口部分仍沿用既有 6502 电气集中继电接口电路,如信号机点灯电路、道岔控制电路、轨道电路、闭塞接口电路等。
该种模式适用于室外设备的本地控制,而对于室外设备需要远距离控制的区域联锁 ( 或集中联锁) ,则存在结构上的问题。
因此,有必要研发适用于远距离信息安全传输的全电子输入输出系统,既可以优化计算机联锁的系统结构以及提高系统整体性能,又能实现对计算机联锁系统主机、通信系统、室外设备接口电路的故障监控,同时又可对接口电路输入输出内容、控制命令的传递过程实现全过程记录。
采用全电子模式的计算机联锁系统,在满足安全认证的前提下,能够规避国内安全型继电器不满足欧洲标准要求的问题,在国内有良好工程业绩的前提下,可以加快占有海外铁路市场的步伐。
1全电子计算机联锁系统结构全电子计算机联锁系统的结构设计应既能满足本地室外设备的控制需求,同时又要适应远距离区域控制的需求。
在区域联锁 ( 或集中控制) 模式下,应充分考虑远距离控制室外设备指令及信息的安全、可靠传输,因此,系统控制结构可配置主控站联锁系统与被控站联锁系统。
一个主控站根据需要可以控制多个被控站; 主控站与被控站之间设置冗余的传输通道,信息的传输除采用铁道部相关协议外,还应采取更加严密的远程传输的防护措施;被控站由于不进行联锁逻辑计算,可只设置高可靠性的通信主机,以及负责输入输出控制的全电子接口系统。
1. 1主控站全电子联锁系统结构主控站计算机联锁系统除全电子输入输出部分外,其主要结构仍沿用既有系统结构,联锁主机采用二乘二取二的冗余结构,通过交换机与被控站进行数据通信,主控站联锁逻辑控制及控显软件不需要修改,无须改变已经通过验证的联锁软件系统,只需对输入输出接口软件及远程通信部分软件进行修改。
全电子联锁系统建议结构如图 1 所示。
专业知识分享版使命:加速中国职业化进程在上述建议的结构中,全电子的接口系统根据功能分别配置,如道岔接口板、信号机接口板、轨道电路采集接口板以及零散电路接口板等。
为保证系统安全、可靠运行,全电子板采集、驱动电路与联锁主机通信接口应采用冗余 CAN 总线通信。
全电子接口板电源系统采用 2 + 2 冗余设置,采用集中供电方式,每块电源板应能满足全电子接口板工作最大电源容量 ( 不包括室外设备动作电源) 要求。
主控站与被控站之间经交换机通过冗余设置的光缆通道连接,通信协议采用铁道部通信协议,但应考虑远距离传输的安全防护。
1. 2被控站系统结构及安全防护措施区域联锁 ( 或集中控制) 模式中主控站联锁系统负责联锁逻辑计算,被控站只接收主控站室外设备的控制信息,或将被控站室外设备状态信息发送至主控站,所以被控站系统建议采用如图 2 所示系统结构。
专业知识分享版使命:加速中国职业化进程被控站设置双机热备的通信主机,主机系统采用高可靠性的工业级计算机,通过冗余的网络接口与主控站联锁系统通信,同时主机系统提供冗余的 CAN 总线接口与本地全电子输入输出系统进行通信; 采用工业级计算机可在降低系统总体造价的同时满足系统可靠性、可用性需求。
室外设备接口板采用和主控站相同的结构与控制模式。
双机热备的主、备机同时接收主控站系统控制命令,同时对接收的命令进行比较,验证一致后由通信主机发送到全电子系统执行。
双机热备的主、备机还同时接收全电子系统采集的室外设备状态信息,同时对接收的信息进行比较,验证一致后由通信主机发送到主控站主机系统,不一致时发送安全侧信息至主控站。
通信主机通过检测自身设备状态、与备机通信状态进行主、备状态自动切换,主、备状态不受全电子输入输出接口板状态影响。
通信主机通过维修机提供手动主、备切换功能。
2输入输出板控制电路采用全电子模式控制室外设备动作、室外设备状态的采集,应考虑电子控制设备的电流和电压参数、可靠性及设备尺寸。
本方案输出控制建议采用固态继电器 SSR ( solid State Relay) 作为输出控制开关。
SSR 输入端要求很小的控制电流,能与TTL 、HTL 、CMOS 等集成电路较好地兼容; 而输出回路则采用可控硅或大功率晶体管接通和断开负载电流。
输入与输出之间采用光电耦合,通断没有可动接触部件,因此具有工作可靠、开关速度快、无噪音、寿命长、体积小、无火花、耐蚀、防爆、抗振等特点。
室外设备状态采集采用工业级 A/D( 模数转换) 及磁隔离器件,确保室外采集电源与室内计算机设备的电气隔离,防止雷电、专业知识分享版使命:加速中国职业化进程牵引电流及其他外部电源对联锁主机或通信主机系统的影响。
本方案中电子设备直接与室外电缆连接,除在电缆引入端有防雷器件外,在板级输入输出端也应增加板级防雷器件。
为保证输入输出控制电路能及时发现板级设备及室外设备故障,采用冗余单片机( 如 ARM 系列或 DSP 系列) 为逻辑处理单元,负责输入输出信息的控制与采集,同时板级 CPU 能够实时监督板级元器件的工作状态,故障信息通过CPU 发送到本地维修机; 板级冗余 CPU 对输入输出信息进行比较计算,双机运算结果比较一致进行室外设备控制及状态采集,不一致则输出安全侧控制,确保系统安全、可靠运行。
全电子输入输出接口板每个 CPU 均提供 2 路冗余的 CAN 总线接口,确保控制、采集数据的可靠传输。
2. 1信号机控制电路全电子信号机控制电路原理应按照 6502 电气集中信号机点灯电路原理进行设计,信号机控制电路从如下主要方面进行安全防护。
1. 采用双 CPU 模式,每个 CPU 分别接收主机发送的控制命令,并比较命令的一致性。
命令一致时输出控制命令 ( 开放或关闭信号) ,命令不一致时输出关闭命令。
2. 信号点灯电源采用双断控制,每个控制点采用双电子开关冗余配置,提高系统控制可靠性。
3. 设置紧急控制开关。
若控制开放信号或关闭信号机的开关故障 ( 开关短路) ,在发出控制命令后不能关闭信号,应立即切断信号供电电源,将信号机置于灭灯状态。
4. 对每个控制开关状态进行实时采集,与CPU 发出的控制状态进行比较,若没有控制命令而开关打开,或没有控制命令而有点灯电流时立即切断供电电源; 若有控制命令而开关没有打开立即报警,并将故障状态返回至联锁主机。
5. 采用电子方式采集点灯电流,监督信号机灯丝状态,允许灯丝断丝时立即将断丝状态返回至联锁主机,关闭开放的信号,并报警。
2. 2道岔控制电路 (以四线制直流道岔为例)直流道岔控制电路采用直流型 SSR ( solid staterelay) 电子开关,控制模式采用双 CPU ,其控制原理参照四线制道岔控制原理进行设计。
( 目前国内的道岔控制电路考虑节省室外电缆,动作线与表示回线公用。
若不考虑节省室外电缆,将动作线与表示线分开设计,全电子道岔控制电路逻辑将更加简单) 。
道岔控制电路的控制与安全防护措施如下:1. 采用双 CPU 模式,每个 CPU 分别接收主机发送的控制命令,并比较命令的一致性,命令一致输出控制命令 ( 定位或反位操纵) ,命令不一致时输出关闭命令。
2. CPU 接收到主机发送的控制命令立即打开控制开关 ( 定操打开 X1 与 X4 控制开关,反操打开 X2 与 X4 控制开关) ,并采集 X4 道岔动作电流,当没有电流或电流小于规定电流值时立即关闭开关,并返回故障状态; 当电流正常时保持开关打开至道岔转换到位,到位后转辙机切断电源,道岔动作电流为零,CPU 控制 X1、X4 开关关闭,接通道岔表示电路 ( X1、X3 或 X2、X3) ,CPU 采集三个冗余的光耦条件,判断道岔处于定位或反位,并返回至主机。
3. 动作线与动作回线采用双断控制,每个控制点采用双电子开关冗余配置,提高控制可靠性。
4. 设置紧急控制开关。
对每个控制开关状态进行实时采集,与 CPU 发出的控制状态进行比较,若无输出控制命令 ( 定操或反操) 开关打开,立即切断信号供电电源,防止道岔误动。
5. 道岔表示位置采用 3 组光耦组合,当 3 个光耦一致时且与另一组光耦状态相反时才用于道岔位置的判断条件,否则道岔则置于四开状态,确保不出现室内外状态不一致情况。
6. 采用全电子道岔控制电路,在道岔故障失去表示时必须进行一次道岔定位、反位操作来确认道岔位置并返回道岔表示,防止由于人为封连道岔表示线出现错误道岔表示,或实际位置与表示位置不一致而出现危及行车安全的事故。
专业知识分享版使命:加速中国职业化进程2. 3轨道采集电路 (以 50 Hz 轨道电路为例)全电子轨道电路电压的采集同样采用双 CPU 模式,轨道电压防雷单元、电压调理模块、模数转换模块电气隔离后,经双 CPU 比较计算将轨道电路占用空闲状态发送至主机。
全电子轨道电路采集模块结构 ( 一路轨道电压采集) 如图 3 所示。
轨道采集模块的工作原理及故障-安全措施如下。
1. 采用双 CPU 模式,每个 CPU 分别计算采集到的轨道电压,当 2 个 CPU 计算的电压差不大于 1 V ( 可根据需要设定) 且采集值均为 18 V 时为轨道空闲,如果 2 个 CPU 计算的电压差大于1 V ,或 2 个 CPU 计算的电压小于 5 V 时,则将轨道置于占用状态。
轨道电路的占用空闲值根据不同轨道电路的调整情况在本地维修机中可以分别设置。
2. A / D 模块输出端为经编码的串行数据,当A / D 模块故障时,其编码序列将错误,CPU 不能计算出电压值,轨道将置于占用状态。
3. 磁隔离模块提供室外设备采集与 CPU 之间的电气隔离,保证 CPU 后级及主机系统安全; 同时磁隔离器件采用与 A/D 模块相同的串行编码,故障时 CPU 不能计算电压,轨道将置于占用状态。
其他类型的接口板采用相同的原理进行开发,不再一一表述。
2. 4主机与全电子输入输出系统通信接口方式2. 4. 1 CAN 总线的特点全电子输入输出系统通过 CAN ( Controller Ar-ea Network) 总线与主机系统进行通信,CAN 总线也称控制器局部网,属于现场总线的范畴,它是一种有效支持分布控制或实时控制的串行通信网络。