信号与系统_——零极点及稳定性响应
《信号与线性系统》 东南大学 管致中 夏恭恪 孟桥著 高等教育出版社第六章-2

An-1n -1 a An-2 An-3 Bn-1 n -3 Cn-1n -5 Dn-1 -7 a a an … Bn-2 Bn-3 B2 0 0 Cn-2 Cn-3 0 0 0 Dn-2 … Dn-3 …
Ai −1 =
M
第(n-1)行 A2 第n行 第(n+1)行
An − 2 =
3
∴ H 3 ( s ) 系统不稳定
以上两个性质是判断系统稳定的必要条件
第六章 连续时间系统的系统函数
(二) 罗斯-霍维茨(Routh-Hurwitz)准则(判据) 罗斯-霍维茨( 准则(
内容: 若 内容: D(s) = an sn + an−1sn−1 +L+ a1s + a0 的根全部位于s左半平面的充要条件是 左半平面的充要条件是: 则 D(s) = 0 的根全部位于 左半平面的充要条件是: (ⅰ)D ( s ) 的全部系数 a i 为正,无缺项; 为正,无缺项; 罗斯-霍维茨阵列中第一列数字( )符号相同 (ⅱ)罗斯-霍维茨阵列中第一列数字( A i )符号相同 -6 R-H阵列: 1行 An an Bn an -2 Cnan -4 Dnan… … 阵列: - 阵列 第
第六章 连续时间系统的系统函数
例 4 反馈系统
F(s) + _ E(s) G(s)
H(s)
Y(s)
前向通道 , 反馈通道 H ( s ) = K 问当常数满足什么条件时,系统是稳定的? 解: E ( s) = F ( s) − H ( s)Y ( s)
Y ( s ) = E ( s )G ( s ) = G ( s ) F ( s ) − G ( s ) H ( s )Y ( s )
信号与系统6-1

C
u1 (t )
s 解: U1 ( s ) 2 s 4
R
u2 (t )
1 s s LC U 2 ( s ) U1 ( s ) H ( s ) 2 s 4 s2 s 1 RC LC
2
将激励信号的极点抵消
2 2
则不会出现强迫响应分量
可见,欲使u2(t)中不出现强迫响应分量,则必须有
试证明系统的正弦稳态响应为:
yss (t ) | H ( j0 ) | Em cos[0t (0 )]
电信学院
第六章第1讲
22
系统函数与正弦稳态响应
证:激励函数可表示为
1 f (t ) Em (e j0t e j e j0t e j ) 2 1 e j e j F ( s ) Em 激励的拉氏变换 s j s j 2 0 0
( s j 2)( s j 2) s2 4 H ( s) H 0 H0 s( s j 4)( s j 4) s( s 2 16)
j2
0
- j2
又: h(0 ) lim h(t ) lim sH ( s) 1 可得:H0=1 t 0 s 故: H (s) s 2 4
t
j
( 2)
h(t )
a
2 0
j
t e a t (t )
h(t )
t
( s a)
2
0
a
e a t sin( 0t ) (t )
第六章第1讲
t
电信学院
11
系统函数的极点与冲激响应波形对应
信号、系统分析与控制 第9章 系统函数的零极点
2. 离散系统函数的零极点
M
离散系统函数的多项式形式为:
H (z)
B(z) A(z)
bj z j
j0
N
ai z i
b0 a0
b1z 1 ... bm z m a1z 1 ... an z n
(9.1.2)
将系统函数进行因式分解,可采用根的形式表示多项式,即 i0
M
H (z)
Y (z)
➢ 说明系统正弦稳态特性。
➢ 研究系统的稳定性。从系统函数的极点分布可以了解系统的固有频率,进而了解系统冲激响应的模式,也就 是说可以知道系统的冲激响应是指数型、衰减振荡型、等幅振荡型、还是几者的组合,从而可以了解系统的
响应特性及系统是否稳定。
1. 连续系统的零极点
系统函数一般以多项式形式出现,分子多项式和分母多项式都可以分解成线性因子的乘积,即连续系统函数:
➢ 可预测系统的时域特性。确定系统函数H(s)、H(z)。 ➢ 可以用函数 [r,p,k]=residuez(num,den)完成部分分式展开计算系统函数的留数、极点和增益; ➢ 可以用函数sos=zp2sos(z,p,k)完成将高阶系统分解为2阶系统的串联。
➢ 描述系统的频响特性。从系统的零、极点分布可以求得系统的频率响应特性,从而可以分析系统的正弦稳态 响应特性。 使用h=freqz(num,den,w)函数可求系统的频率响应。
2. 使用多项式的roots()函数分别求出多项式和的根,获得系统函数的极点、零点。
3. 用用zero(sys)和pole(sys)函数直接计算零极点,sys表示系统传递函数。用法如下:
z = zero(sys):返回 LTI模型 sys的零点z 的列向量。
[z,gain] = zero(sys):同时返回增益gain。
信号与系统3-5

a
与题中所给出 y(t) 2cos(2t 45)
比较,得
a 2, b 4 2
该系统的系统函数为
H (s) 4 2 s2
电信学院
23
课堂小结
本节课的重点和难点
系统稳定性的概念 BIBO稳定性与渐进稳定性 两种稳定性的关系
系统的强迫响应 系统的正弦稳态响应
电信学院
17
系统函数与正弦稳态响应
证:激励函数可表示为
f
(t)
1 2
Em (e j0te j
e j0te j )
激励的拉氏变换 系统零状态响应为
F(s)
1 2
Em
s
e j
j0
s
e j
j0
Yzs (s) H (s)F(s) Yh (s) Yss (s)
稳定性是系统本身的性质所决定的,与外加信号 无关。
在时域,对于因果系统,
在时间t 趋于无限大时,h(t)是趋于零,系统是稳定的; 若时间t 趋于无限大时, h(t)是趋于有限值,则系统是
临界稳定的; 若时间t 趋于无限大时, h(t)是增长的,则系统是不稳
定的。
在s域,
系统函数的极点位于s左半平面,系统是稳定的。 极点在虚轴上有单极点,系统是临界稳定。 极点在s右半平面或在虚轴上有重极点,系统不稳定。
电信学院
19
例 3.31
对于一个 H
(s)
s2
s
2 4s
4
的系统,求出下列输入的稳态响应
yss (t)。 (1)f (t) 8cos 2t
§4-6 系统函数与系统的频响特性

H (s)
k s1
(s 1)(s 2 )
H ( j)
k j1
( j 1)( j 2 )
系统函数的零极图如下:
《Signals & Systems》
《信号与系统》
大连海事大学信息科学技术学院
⑴ 当Ω=0,零点矢量的模等于0,相角
等于π/2,幅频响应|H( jΩ)|=0;极点 矢量的相角均等于零, φ(Ω)= (π/2)。 1
如上两例RC电路,试根据其零极图,粗略的画出其频响曲线。
先看以电容电压为输出的情况。其零极 图如下:
R
ui (t)
C
uo (t)
⑴ 当Ω=0,极点矢量指向原点,其模长 为α,相角等于0;于是 |H( jΩ)|=α/α=1,φ(Ω)=0。
⑵ 当Ω↑,极点矢量模↑,相角↑; |H( jΩ)|↓,φ(Ω)=-arctg(Ω/α)↓。
《信号与系统》
大连海事大学信息科学技术学院
§4-6 系统函数的零极点分布与系统的频率响应
一、H(s)与H(jΩ)
由前所讲,拉氏变换是傅氏变换由实频域Ω至复频域s的推广, 傅氏变换是拉氏变换在s平面虚轴上的特例。即
j
H ( j) H (s) |s j
二、H(s)的零极点分布与H(jΩ)
由于H(s)一般是有理分式,即它可表示为
s
C (s p1)(s p2)
上式中 1 ( 1 )2 4
p1,2 RC
RC 2
LC
1 ( 1 )2 1 2RC 2RC LC
《Signals & Systems》
《信号与系统》
大连海事大学信息科学技术学院
令 1
2RC
1 LC
信号与系统实验系统极点对系统频响的影响
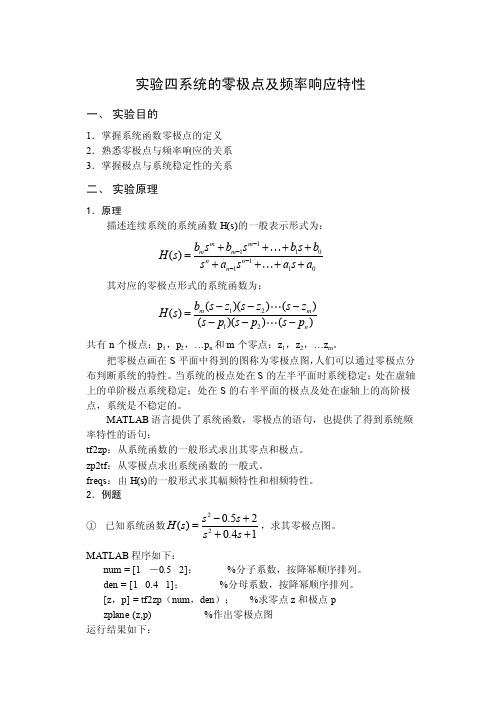
实验四系统的零极点及频率响应特性一、 实验目的1.掌握系统函数零极点的定义2.熟悉零极点与频率响应的关系3.掌握极点与系统稳定性的关系二、 实验原理1.原理描述连续系统的系统函数H(s)的一般表示形式为:11101110()m m m m n n n b s b s b s b H s s a s a s a ----++++=++++ 其对应的零极点形式的系统函数为:1212()()()()()()()m m n b s z s z s z H s s p s p s p ---=--- 共有n 个极点:p 1,p 2,…p n 和m 个零点:z 1,z 2,…z m 。
把零极点画在S 平面中得到的图称为零极点图,人们可以通过零极点分布判断系统的特性。
当系统的极点处在S 的左半平面时系统稳定;处在虚轴上的单阶极点系统稳定;处在S 的右半平面的极点及处在虚轴上的高阶极点,系统是不稳定的。
MATLAB 语言提供了系统函数,零极点的语句,也提供了得到系统频率特性的语句:tf2zp :从系统函数的一般形式求出其零点和极点。
zp2tf :从零极点求出系统函数的一般式。
freqs :由H(s)的一般形式求其幅频特性和相频特性。
2.例题① 已知系统函数220.52()0.41s s H s s s -+=++,求其零极点图。
MATLAB 程序如下:num = [1 -0.5 2]; %分子系数,按降幂顺序排列。
den = [1 0.4 1]; %分母系数,按降幂顺序排列。
[z ,p] = tf2zp (num ,den ); %求零点z 和极点pzplane (z,p) %作出零极点图运行结果如下:② 已知系统的传递函数为220.20.31()0.41s s H s s s ++=++,求其频率特性。
MATLAB 程序如下:num = [0.2 0.3 1]; den = [1 0.4 1];w =logspace (-1,1); %频率范围freqs(num ,den ,w) %画出频率响应曲线运行结果如下:③某卫星角度跟踪天线控制系统的系统函数为:137501340022681742013750)(234++++=s s s s s H试画出其零极点图,并求其冲激响应)(t h 。
清华大学信号与系统课件第五章S域分析、极点与零点
2019/11/8
课件
2
系统函数的极零点分布
m
k (s z j)
H (s)
j 1 n
(s pi)
i 1
j
p1
z1
p0
z0
p2
z2
2019/11/8
课件
3
§5.1 由系统函数的极零点分布决定
时域特性 (1)时域特性——h(t) Ki与零点分布有关
m
k (s zj)
H (s)
j
h(t)
0
t
H
(s)
1 S2
2019/11/8
h(t) t
课件
12
(3) 有二重极点分布—— (b)在负实轴上有二重极点
j
h(t)
0
t
1
H(s) (S)2
2019/11/8
h(t)tet
课件
13
(3) 有二重极点分布—— (c)在虚轴上有二重极点
j
h(t)
0
t
H(s)(S22S12)2 h(t)tsin1t
2019/11/8
课件
28
(7)求第一周期的稳态响应
V0s1(s) V01(s)V0t (s)
(1es ) s(s)
11eeT
.
s
1
v0s1(t)[111ee(TT) .et]u.(t)
(1e(t))u.(t)
Vos1(t) 1
2019/11/8
课件
38
(1)一阶系统
H(s) K sz1 s p1
H(s) K s s p1
• 一零点,一在实轴的 极点
信号与系统 第六章

ω ω (1 ω ) = +j 2 2 2 (1 ω ) + ω (1 ω 2 ) 2 + ω 2
2
V 1
ω =0
H ( jω )
1 2
U
= U (ω ) + jV (ω )
ωห้องสมุดไป่ตู้
3.极点,零点图(Pole-Zero Plot ) 极点, 极点 系统函数可以表示成有理函数的形式, 系统函数可以表示成有理函数的形式,即
M e , M r 为有限值
∵ r (t ) = e (t ) h (t )
∴ r (t ) = e(t ) h(t ) =
+∞
∫
+∞
∞
e(t τ )h(τ )dτ
+∞ ∞
≤ ∫ e(t τ ) h(τ ) dτ ≤ ∫ h(τ ) dτ M e = M r ∞
∴ 要求
结论: 结论:
除个别孤立的冲激函数外,单位冲激响应都应是有限的 有限的, ∫ 除个别孤立的冲激函数外,单位冲激响应都应是有限的,即
bm s m + bm1s m1 + + b1s + b0 H (S ) = an s n + an1s n1 + a1s + a0 极点——使 H (s ) 为无穷大的 使 极点 零点——使 零点——使 H (s ) 为 0 的 (1)
s 值,即分母多项式等于 的根; 即分母多项式等于0的根 的根;
表示系统函数的方法常用三种方法:频率特性曲线, 表示系统函数的方法常用三种方法:频率特性曲线, 复轨迹和极点零点分布图. 复轨迹和极点零点分布图. 1.频率特性(即系统的频率响应特性) 频率特性(即系统的频率响应特性) 频率特性
“信号与系统”中系统稳定性分析

“信号与系统”中系统稳定性分析巩亚楠 魏德旺 刘俊良 李淑晴 吕海燕*(临沂大学 山东临沂 276000)摘要:“信号与系统”是电子信息类本科阶段的专业基础课。
在学习的过程中,很多同学只是记住知识点,不明白它们之间的逻辑关系,不会灵活运用。
该文旨在利用思维导图的方式对系统稳定性分析方法进行总结,描述了连续时间系统和离散时间系统的稳定性,对每个系统提出了两种分析方法,即时域分析法和变换域分析法,对两种方法的具体分析过程做出了详细的说明,并对系统稳定性给出了4种判别方法。
借助思维导图,帮助学生更好地理解知识,充分调动学生学习的积极性。
关键词:信号与系统 思维导图 系统稳定性分析 连续时间系统 离散时间系统中图分类号:G64文献标识码:A 文章编号:1672-3791(2023)18-0078-04 Analysis of the System Stability in "Signals and Systems"GONG Yanan WEI Dewang LIU Junliang LI Shuqing LYU Haiyan*(Linyi University, Linyi, Shandong Province, 276000 China) Abstract:"Signals and systems" i s a professional basic course of the undergraduate level of electronic information. In the process of learning, many students just remember knowledge points, but they don't understand the logic rela‐tionship among them and cannot use them freely. This paper aims to summarize the analytical method of the system stability by mind mapping, describes the stability of the continuous-time system and the discrete-time system, puts forward two analytical methods for each system, namely the time-domain analysis method and the transform-domain analysis method, explains in detail the specific analytical process of the two methods, and also presents four discriminant methods for the system stability. With the help of mind mapping, students can better comprehend knowledge and fully mobilize their enthusiasm for learning.Key Words: Signals and Systems; Mind mapping; System stability analysis; Continuous-time system; Discrete-time system1 “信号与系统”课程地位“信号与系统”作为信息、电子、自控、通信等专业的专业基础课,是为后续数字信号处理、数字图像处理、通信原理、自动控制等课程的学习打下基础,“信号与系统分析”被认为是一门理解困难、计算繁杂、偏理论模型的课程。
系统响应及系统稳定性
实验一及课堂作业实验一:系统响应及系统稳定性一、实验原理与方法1、在时域求系统响应的方法有两种:第一种是通过解差分方程求得系统输出;第二种是已知系统的单位脉冲响应,通过求输入信号和系统单位脉冲响应的线性卷积求得系统输出。
2、检验系统的稳定性,其方法是在输入端加入单位阶跃序列,观察输出波形,如果波形稳定在一个常数值(包括零)上,系统稳定,否则不稳定。
3、系统的频域特性包括传输函数/特性(系统单位脉冲响应的傅里叶变换——幅频、相频)、系统函数/特性(系统单位脉冲响应的Z 变换)、零极点分布等。
分析系统的频域特性是为了知晓系统对不同频率的输入信号所产生的响应结果,因为零、极点分布对系统的频域特性有影响,通过控制系统函数的零、极点分布就可以设计出不同特性需求的系统。
二、实验内容1、编制程序,包括产生输入信号、单位脉冲响应序列的子程序,用filter 函数或conv 函数求解系统输出响应的主程序。
程序中要有绘制信号波形的功能。
2、给定一个低通滤波器的差分方程为)1(9.0)1(05.0)(05.0)(-+-+=n y n x n x n y 输入信号)()(),()(281n u n x n R n x ==(1)分别求出)(8)(1n R n x =和)()(2n u n x =)的系统响应,并画出其波形。
(2)求出系统的单位脉冲响应,画出其波形。
程序见附录1.1、实验结果见图1.1。
3、给定系统的单位脉冲响应为)()(101n R n h =)3()2(5.2)1(5.2)()(2-+-+-+=n n n n n h δδδδ用线性卷积法求)(8)(1n R n x =)分别对系统)(1n h 和)(2n h )的输出响应并画出波形。
程序见附录1.2、实验结果见图1.2。
4、给定一谐振器的差分方程为)2()()2(9801.0)1(8237.1)(00--+---=n x b n x b n y n y n y 令49.10010=b ,谐振器的谐振频率为rad 4.0。
信号与系统_第六章 系统函数与零极点分析

F ( s) Y ( s ) = H ( s) F ( s) = N ( s ) D( s) F ( s) 设一个中间变量 X ( s) = 则: D( s)
Y ( s) = N ( s) X ( s)
E-mail:lynwindsent@
U ( s) H ( s) = = Zin ( s) I ( s)
输入阻抗或策动点阻抗
返 回
E-mail:lynwindsent@
Tel:22896276
广东医学院生物医学工程教研室
信号与线性系统
(2)
+ U1(s) -
I1(s) 系 统
I2(s) + U2(s)
U2 ( s) H ( s) = U1 ( s) I2 ( s) H ( s) = I1 ( s) H ( s) =
广东医学院生物医学工程教研室
信号与线性系统
回忆一下在频域中,系统函数的定义: 回忆一下在频域中,系统函数的定义: 称为系统的频率特性, 关系为: 关系为 H( jω) 称为系统的频率特性,与h(t)关系为:
H( jω) = ∫ h(t )e jωt dt
∞
∞
1 jωt h( jω) = ∫ H( jω)e dt 2π ∞
返 回 E-mail:lynwindsent@ Tel:22896276
广东医学院生物医学工程教研室
信号与线性系统
6.2系统函数的零, 6.2系统函数的零,极点 系统函数的零
N ( s) 一,系统函数可以表示为 H ( s) = D( s) 分母多项式的根称为函数的极点, 分母多项式的根称为函数的极点,分子多项式的根称
(a s (b s
信号与系统 系统函数的零极点分析
M ke jk
k 1
k 1
将 j zr j 都p看k 作是两矢量之差,
将矢量图画在复平面内
五.零极点与系统频率响应的关系
零点: j zr Nre jr
Nr
zr
r
jωσ O极点: j Nhomakorabeapk M k e jk
k pk
zr
Mk
Nr r
jω
σ O
五.零极点与系统频率响应的关系
定性地画系统的幅频特性时 的规律:
五.零极点与系统频率响应的关系
(4) 虚轴若有零点 zr ,j则r 当 通过j零点
H () 0
(5) 虚轴若有极点 pk j,则k 当 通过j极点
H ()
zr 时,jr p时k , jk
(6) 在 j 处主要看零点极点的个数,
若零点比极点多,则 H ()
若极点比零点多,则 H () 0
5.7.2 系统零极点与冲激响应模式的关系
1、极点的影响
H (s)
1 s2
极点在原点
h(t) tu(t),t , h(t)
重 极
H
(s)
(s
1 a)2
极点在实轴上
点 h(t) t et u(t),α 0,t ,h(t) 0
H
(s)
2ωs (s2 ω2
)2
在虚轴上
h(t) t sin ωtu(t),t ,h(t) 增幅振荡
h1(t) L1[H1(s)] et cos(3t)u(t)
h2 (t) L1[H2 (s)] et cos(3t)u(t) et sin(3t)u(t) et[cos(3t) sin(3t)]u(t) et 2 sin(3t 45o )u(t)
《信号与系统》课程讲义4-4

j 2
j1
j
0
1
复数极点 复数零点
j1
成对出现
j 2
§4.4 系统函数零极点∽时域特 性和稳定性
s( s 2)(s 3) [例1]: ② H ( s) ( s 1) 2
解: ② 极点: s = -1 (二阶) s = ∞ (一阶) 零点: s = 0 (一阶) s = -2(一阶) s = -3(一阶)
§4.4 系统函数零极点∽时域特 性和稳定性
s[( s 1)2 1] [例1]: ① H ( s) ( s 1)2 ( s 2 4)
解:
极点:s = -1 (二阶) s = j2 (一阶) s = -j2(一阶) 零点:s = 0 (一阶) s = 1+j1(一阶) s = 1-j1 (一阶) s = ∞ (一阶)
r (0 ) 1 ,r(0 ) 1 ,e(t ) u(t )
解:
s 1 1 H ( s) 2 s 3s 2 s 2 全部
固有频率
零、极点相消 丢失固有频率
1 1 1 1 1 1 Rzs ( s ) ( ) rzs (t ) (1 e 2t )u (t ) s2 s 2 s s2 2
10 40 10 t 10 t 10 v2 (t ) [ cos 4t sin 4t e ]u (t ) [ e cos(4t 76 )]u (t ) 17 17 17 17 17
自由响应 强迫响应
§4.4 系统函数零极点∽时域特 性和稳定性
三、H(s)极点与系统稳定性关系
n
pi t
K e
k 1 k
v
pk t
自由响应 强迫响应 (系统函数极点形成) (激励函数极点形成)
系统的稳定性以及稳定性的几种定义
系统的稳定性以及稳定性的几种定义一、系统研究系统的稳定性之前,我们首先要对系统的概念有初步的认识。
在数字信号处理的理论中,人们把能加工、变换数字信号的实体称作系统。
由于处理数字信号的系统是在指定的时刻或时序对信号进行加工运算,所以这种系统被看作是离散时间的,也可以用基于时间的语言、表格、公式、波形等四种方法来描述。
从抽象的意义来说,系统和信号都可以看作是序列。
但是,系统是加工信号的机构,这点与信号是不同的。
人们研究系统还要设计系统,利用系统加工信号、服务人类,系统还需要其它方法进一步描述。
描述系统的方法还有符号、单位脉冲响应、差分方程和图形。
中国学者钱学森认为:系统是由相互作用相互依赖的若干组成部分结合而成的,具有特定功能的有机整体,而且这个有机整体又是它从属的更大系统的组成部分。
二、系统的稳定性一个系统,若对任意的有界输入,其零状态响应也是有界的,则称该系统是有界输入有界输出(Bound Input Bound Output------ BIBO)稳定的系统,简称为稳定系统。
即,若系统对所有的激励|f(·)|≤Mf ,其零状态响应|yzs(·)|≤My(M为有限常数),则称该系统稳定。
三、连续(时间)系统与离散(时间)系统连续系统:时间和各个组成部分的变量都具有连续变化形式的系统。
系统的激励和响应均为连续信号。
离散系统:当系统各个物理量随时间变化的规律不能用连续函数描述时,而只在离散的瞬间给出数值,这种系统称为离散系统。
系统的激励和响应均为离散信号。
四、因果系统因果系统 (causal system) 是指当且仅当输入信号激励系统时,才会出现输出(响应)的系统。
也就是说,因果系统的(响应)不会出现在输入信号激励系统的以前时刻。
即输入的响应不可能在此输入到达的时刻之前出现的系统;也就是说系统的输出仅与当前与过去的输入有关,而与将来的输入无关的系统。
判定方法对于连续时间系统:t=t1的输出y(t1)只取决于t≤t1的输入x(t≤t1)时,则此系统为因果系统。
清华大学信号与系统课件第五章S域分析、极点与零点
2019/11/15
课件
22
本节作业
• 5-1,5-3,5-8,5-10, • 5-6*,5-9*,5-11* , • 5-13,
2019/11/15
课件
23
§5.2- 暂态响应与稳态响应
• 系统H(s)的极点一般是复数,讨论它们 实部和虚部对研究系统的稳定性很重要
• 不稳定系统 Repi0增幅
j
0
p1
h(t)
0
et t
H(s) 1
S
h(t) et
2019/11/15
课件
7
(2) 几种典型的极点分布——
(d)一阶共轭极点在虚轴上
j
p1 j1
h(t)
0
0
t
p 2 j1
H(s) 1
h(t)sin 1t.u(t)
2019/11/15
S 2
2
0 p1 t
H (s) 1 S
2019/11/15
h(t)u(t)
课件
5
(2) 几种典型的极点分布—— (b)一阶极点在负实轴
j
0
p1
h(t)
e t
t
H(s) 1
S
h(t) et
2019/11/15
课件
6
(2) 几种典型的极点分布—— (c)一阶极点在正实轴
幅度该变
相位偏移
2019/11/15
课件
34
H(j0)H0ej0
H(j)H(j)ej(j)
若 0 换成 变量
系统频率
特性
幅频特性 相位特性
2019/11/15
《信号与系统》课程讲义4-5
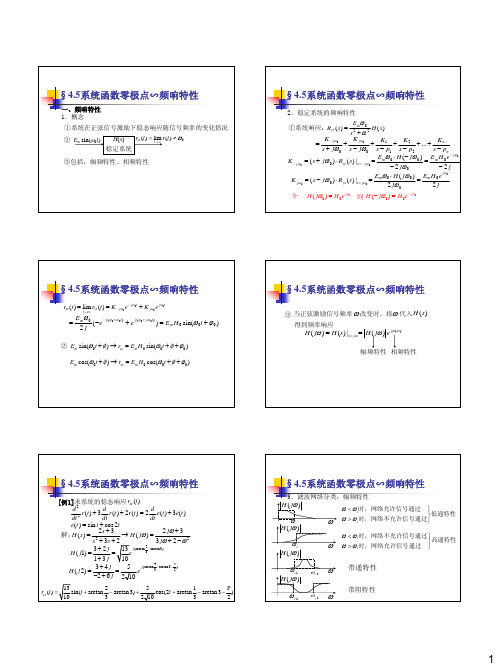
§4.5系统函数零极点∽频响特性一、频响特性1.概念①系统在正弦信号激励下稳态响应随信号频率的变化情况②H (s )稳定系统0sin()m E t ω0()lim ()~ss t r t r t ω→∞=③包括:幅频特性、相频特性§4.5系统函数零极点∽频响特性00120012...j j n nK K K K K s j s j s p s p s p ωωωω−=++++++−−−−j e H E j j H E s R j s K j m m j s zs j 22)(|)()(00000000−=−−⋅=⋅+=−−=−ϕωωωωωωje H E j j H E s R j s K j m m j s zs j 22)(|)()(00000000ϕωωωωωω=⋅=⋅−==2.稳定系统的频响特性)()(220s H s E s R m zs ωω+=①系统响应:000()j H j H e ϕω=000()j H j H e ϕω−−=令则§4.5系统函数零极点∽频响特性0000()lim ()j t j tss zs j j t r t r t K e K e ωωωω−−→∞==+)sin()(2000)()(00000ϕωωωϕωϕ+=+−=++−t H E e e jE m t j j t j m 0000sin()sin()m ss m E t r E H t ωφωφϕ+→=++②0000cos()cos()m ss m E t r E H t ωφωφϕ+→=++§4.5系统函数零极点∽频响特性③ωω()H s 当正弦激励信号频率改变时,将代入得到频率响应()()()|()j s j H j H s H j e ϕωωωω===幅频特性相频特性§4.5系统函数零极点∽频响特性[例1]求系统的稳态响应22()3()2()2()3()d d dr t r t r t e t e t dt dt dt ++=+()sin cos 2e t t t=+解:222323()()3232s j H s H j s s j ωωωω++=→=+++−2(arctan arctan3)33213(1)1310j j H j ej −+==+4(arctan arctan3)32345(2)26210j j H j ej π−−+==−+()ss r t 13251()sin(arctan arctan 3)cos(2arctan arctan 3)10332210ss r t t t π=+−++−−§4.5系统函数零极点∽频响特性c ωω()H j ωc c ωωωω<⎫⎬>⎭时,网络允许信号通过低通特性时,网络不允许信号通过cωω()H j ωc c ωωωω<⎫⎬>⎭时,网络不允许信号通过高通特性时,网络允许信号通过1c ω2c ωω()H j ω带阻特性3.滤波网络分类:幅频特性1c ω2c ωω()H j ω带通特性1c ω§4.5系统函数零极点∽频响特性1111()()()()()()mmj j j j nniii i K s z K j z H s H j s p j p ωωω====−−=→=→−−∏∏∏∏Oσ⋅×ip jz iθj ψj ωi M jN ,j i z p 频率特性取决于零、极点的分布4.频响特性的S 平面几何分析法()H j ωjj j j j z N eψω−=ij i i j p M eθω−=→令§4.5系统函数零极点∽频响特性121212121212[()()]1212()()()m nm n j j j m j j j n j m nj N e N e N e H j KM e M e M e N N N KeM M M H j e ψψψθθθψψψθθθϕωωω+++−+++=== 1212()()()m n ϕωψψψθθθ=+++−+++ 1212()m nN N N H j KM M M ω= 其中Oσ⋅×ip jz iθj ψj ωiM jN §4.5系统函数零极点∽频响特性RC 21()()11()V s R sH s V s R s sC RC ===++CR++-1v -2v 【例2】研究图示的高通滤波网络的频响特性10z =零点:11p RC=−极点:解:转移函§4.5系统函数零极点∽频响特性()|()s j H s H j ωω==11()1211()j j j N e V H j e M e V ψϕωθω==→211111,()V N V M ϕωψθ==−O ×j ω1M 1N 1θ190ψ=σ1RC−以矢量因子表示为1211111110,000,90()90N V N M RC M V θψϕω⎧==→=→=⎪⎨⎪==→=⎩0ω=时,§4.5系统函数零极点∽频响特性121111111222,2245,90()45N V N M RC RC M V θψϕω⎧==→=→=⎪⎨⎪==→=⎩ 1211111190,90()0N V M V θψϕω⎧→⇒→⎪⎨⎪→=→=⎩1RC ω=时,此点为高通滤波网络截止频率点ω→∞时,45 901RCω()ϕωO ()H j ω221§4.5系统函数零极点∽频响特性s RC 21()()()V j H j V j ωωω=1122R C R C ++-1v -2v C1R1C2R2++--3v 3kv 【例3】由平面几何法研究下图所示二阶系统的频响特性,,且§4.5系统函数零极点∽频响特性1311211112112223221()()1()()11()()()()()1sC V s V s R V s k s sC H s V s R C s s R R C R C V s kV s R sC ⎧⎪⎪=⎪+⎪⇒==⎨⎪++⎪=⎪+⎪⎩i 1121122110;,z p p R C R C ==−=−O ×j ω1M 1N 1θ190ψ= σ111R C −×2M 2θ221R C−解:零、极点为:1122R C R C 由于221R C −,所以靠近原点,111R C −离开较远。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验七、系统极零点及其稳定性三、已知下列传递函数H(s)或H(z),求其极零点,并画出极零图。
1. b=[3 -9 6];a=[1 3 2];zplane(b,a)2. b=[1];a=[1 0];zplane(b,a)3. b=[1 0 1]; a=[1 2 5]; zplane(b,a)4. b=[1.8 1.2 1.2 3];a=[1 3 2 1];zplane(b,a)五、求出系统的极零点,判断系统的稳定性。
5、先求出分子分母多项式系数>> syms s>> zs=100*s*(s+2)^2*(s^2+3*s+2)^2;>> expand(zs)ans =100*s^7+1000*s^6+4100*s^5+8800*s^4+10400*s^3+6400*s^2+1600*s>> syms s>> ps=(s+1)*(s-1)*(s^3+3*s^2+5*s+2)*((s^2+1)^2+3)^2;>> expand(ps)ans =-32-80*s-48*s^2+8*s^4-16*s^3+28*s^6+20*s^5+44*s^7+30*s^8+s^13+8*s^11+23*s^9+3*s^12 +11*s^10再求出极零点b=[100 1000 4100 8800 10400 6400 1600 0];a=[1 3 8 11 23 30 44 28 20 8 -16 -48 -80 -32];[z,p]=tf2zp(b,a)求解结果:z =-2.0005 + 0.0005i-2.0005 - 0.0005i-1.9995 + 0.0005i-1.9995 - 0.0005i-1.0000 + 0.0000i-1.0000 - 0.0000ip =1.00000.7071 + 1.2247i0.7071 - 1.2247i0.7071 + 1.2247i0.7071 - 1.2247i-1.2267 + 1.4677i-1.2267 - 1.4677i-0.7071 + 1.2247i-0.7071 - 1.2247i-0.7071 + 1.2247i-0.7071 - 1.2247i-1.0000-0.5466极点不是都在左半平面,因此系统不稳定。
6、clear all;clc;num=conv([1 -1.414 1],[1 1]);den=conv([1 0.9 0.81],[1 -0.3]);[z,p]=tf2zp(num,den)zplane(z,p);z =-1.00000.7070 + 0.7072i0.7070 - 0.7072ip =-0.4500 + 0.7794i -0.4500 - 0.7794i 0.3000根据离散时间因果系统稳定性的判定,极点都在单位圆内部,可知系统稳定。
七、已知反馈系统开环转移函数如下,试作其奈奎斯特图,并判断系统是否稳定。
1、clear; b=[1]; a=[1 3 2]; sys=tf(b,a); nyquist(sys);Nyquist DiagramReal AxisI m a g i n a r y A x i s2、clear; b=[1];a=[1 2 1 0]; sys=tf(b,a); nyquist(sys);-2-1.8-1.6-1.4-1.2-1-0.8-0.6-0.4-0.20-25-20-15-10-50510152025Nyquist DiagramReal AxisI m a g i n a r y A x i s3、clear; b=[1]; a=[1 2 2]; sys=tf(b,a); nyquist(sys);-1-0.500.5Nyquist DiagramReal AxisI m a g i n a r y A x i s实验八、系统的响应一、 用MATLAB 提供的库函数,求下面连续系统的冲激响应和零输入响应。
1、clear; b=[1 3]; a=[1 3 2]; sys=tf(b,a); subplot(1,2,1); impulse(sys); clear; B=[1 3]; A=[1 3 2];[a b c d]=tf2ss(B,A) sys=ss(a,b,c,d); x0=[4 -1]'; subplot(1,2,2); initial(sys,x0); grid;051000.10.20.30.40.50.60.70.80.91Impulse ResponseTime (sec)A m p l i t u d e02460.20.40.60.811.21.4Response to Initial ConditionsTime (sec)A m p l i t u d e2、clear; b=[1 3]; a=[1 2 2];sys=tf(b,a); subplot(1,2,1); impulse(sys); clear; B=[1 3]; A=[1 2 2];[a b c d]=tf2ss(B,A) sys=ss(a,b,c,d); x0=[12/5 -1/5]'; subplot(1,2,2); initial(sys,x0); grid;0246-0.20.20.40.60.811.2Impulse ResponseTime (sec)A m p l i t u d e0246-0.50.511.522.5Response to Initial ConditionsTime (sec)A m p l i t u d e3、clear; b=[1 3]; a=[1 2 1]; sys=tf(b,a); subplot(1,2,1); impulse(sys); clear; B=[1 3]; A=[1 2 1];[a b c d]=tf2ss(B,A)sys=ss(a,b,c,d); x0=[7/4 -1/4]'; subplot(1,2,2); initial(sys,x0); grid;024680.20.40.60.811.21.4Impulse ResponseTime (sec)A m p l i t u d e024680.20.40.60.811.21.41.6Response to Initial ConditionsTime (sec)A m p l i t u d e二、求冲激响应和阶跃响应,以及激励为sint (t>0)时的零状态响应。
clear; b=[1];a=[1 1 1 0]; sys=tf(b,a);subplot(1,2,1);impulse(sys); subplot(1,2,2);step(sys);05100.20.40.60.811.21.4Impulse ResponseTime (sec)A m p l i t u d e05001000150050010001500Step ResponseTime (sec)A m p l i t u d e求零状态响应: clear; b=[1];a=[1 1 1 0]; t=0:0.01:10; e=sin(t); sys=tf(b,a); lsim(sys,e,t);12345678910Linear Simulation ResultsTime (sec)A m p l i t u d e三、先用MATLAB 提供的库函数求零状态响应,然后再用卷积积分运算求零状态响应。
1、用lsim 函数和卷积积分 clear; b=[1 3]; a=[1 3 2]; t=0:0.01:10; e=exp(-3*t); sys=tf(b,a); subplot(1,2,1); lsim(sys,e,t); clear;for n=1:100t(n)=(n-1)/10;F=@(tao)(2*exp(-tao)-exp(-2*tao)).*exp(-3*t(n)+3*tao); f(n)=quad(F,0,t(n)); endsubplot(1,2,2);plot(t,f);xlabel('t(s)');ylabel(‘响应');5100.050.10.150.20.25t(s)响应05100.10.20.30.40.50.60.70.80.91Linear Simulation ResultsTime (sec)A m p l i t u d e2、用lsim 函数和卷积积分 clear; b=[1 3]; a=[1 2 2]; sys=tf(b,a); subplot(1,2,1); step(sys); clear;for n=1:100t(n)=(n-1)/10;F=@(tao)(exp(-tao).*(cos(tao)+2*sin(tao))).*exp(0*(t(n)-tao)); f(n)=quad(F,0,t(n)); endsubplot(1,2,2);plot(t,f);xlabel('t(s)');ylabel(响应');5100.20.40.60.811.21.41.6t(s)响应2460.20.40.60.811.21.41.6Step ResponseTime (sec)A m p l i t u d e3、用lsim 函数和卷积积分 clear; b=[1 3]; a=[1 2 1]; t=0:0.01:10; e=exp(-2*t); sys=tf(b,a); subplot(1,2,1); lsim(sys,e,t); clear;for n=1:100t(n)=(n-1)/10;F=@(tao)((2*tao+1).*exp(-tao)).*exp(-2*t(n)+2*tao); f(n)=quad(F,0,t(n)); endsubplot(1,2,2);plot(t,f);xlabel('t(s)');ylabel('响应');title('卷积积分');5100.10.20.30.40.50.60.7t(s)响应05100.10.20.30.40.50.60.70.80.91Linear Simulation ResultsTime (sec)A m p l i t u d e实验六、系统在MATLAB 中的表示和频率特性一、 用MATLAB 语言描述下列系统,并求出极零点。
2、clear; num=[10 10]; den=[1 0];[z,p,k]=tf2zp(num,den) sys1=zpk(z,p,k) z =-1 p =0 k =10Zero/pole/gain:10 (s+1)--------s3、clear;num=[10];den=[1 -5 0];[z,p,k]=tf2zp(num,den)sys1=zpk(z,p,k)z =Empty matrix: 0-by-1p =5k =10Zero/pole/gain:10-------s (s-5)二、已知系统的系统函数如下,用MATLAB描述下列系统。