台达CANopen通讯伺服速度S控制
CANopen协议在伺服电机控制系统中的实现

CANopen协议在伺服电机控制系统中的实现2007-12-14 22:05基于现场总线的网络技术的研究是自动化领域发展的一个热点,CANopen协议是目前流行于欧洲的基于CAN总线应用层的标准协议,对工程设计者来说,研究现场总线的核心任务就是对控制节点进行开发,本文就是通过实现伺服电机控制模块的CANopen为协议,说明一个基于CANopen协议的控制网络的组态。
伺服电机控制器在自动控制领域里有着广泛的应用,如纺织机械和印刷机等,为了得到理想的速控效果,伺服电机模块除了要在分辨率、线性程度以及转换速率上达到一定的要求外,还应具有良好的在线可控性和实时在线状态检测功能,为此,利用CAN总线高层通信协议CANopen,结合陕西省教育厅“并条机自调匀整” 项目对伺服电机控制模块参数的要求,开发了一个具有硬件可重用性、软件可重配置特点的伺服电机控制模块。
1 CANopen协议概述[1-2]CANopen 协议是由CiA协会针对CAN协议的不完整性而定义出的一个更高层次的协议——应用层协议。
一个CANopen设备模块可分为3部分,如图1所示,通信接口和协议软件用于提供在总线上收发通信对象的服务,不同CANopen设备间的通信是通过交换通信对象来完成的。
这一部分直接面向CAN控制器进行操作,对象字典描述了设备使用的所有数据类型、通信对象和应用对象,对象字典位于通信程序和应用程序之间,用于向应用程序提供接口,应用程序对对象字典进行操作,即可实现CANopen通信。
它包括功能部分和通信部分,通信部分通过对对象字典进行操作实现CANopen通信,而功能部分则根据应用要求来实现。
在CANopen 网络系统中每个节点都有唯一的一个对象字典,而且每个节点的对象字典都具有相同的结构,但具体的内容要根据不同的设备而定,包含了描述该设备及其网络行为的所有参数,CANopen协议还定义了4种报文(通信对象),用于对不同作用的信息进行处理,分别为管理报文(NMT)、服务数据对象(SDO),过程数据对象(PDO)和预定义报文或特殊功能对象。
canopen伺服电机的回零控制方法
canopen伺服电机的回零控制方法Canopen伺服电机在工业自动化领域中应用广泛,其回零控制是实现精确位置定位的关键技术。
本文将详细介绍Canopen伺服电机的回零控制方法,帮助读者更好地理解和应用这一技术。
一、Canopen伺服电机简介Canopen伺服电机是基于Canopen通讯协议的伺服驱动电机,具有高性能、高精度和良好的实时性。
Canopen伺服电机广泛应用于机器人、数控机床、自动化生产线等领域。
二、回零控制的重要性回零控制是伺服电机定位控制的基础,其目的是使电机回到设定的零位,确保系统在每次启动或复位后都能从同一位置开始运行。
精确的回零控制对提高系统定位精度和稳定性具有重要意义。
三、Canopen伺服电机回零控制方法1.电机启动在开始回零控制之前,首先要确保电机已经启动并运行在正常状态。
2.发送回零命令通过Canopen通讯协议,向伺服驱动器发送回零命令。
通常,这个命令是一个特定的数据帧,包含回零模式、速度等参数。
3.回零模式选择Canopen伺服电机通常支持多种回零模式,如:(1)绝对位置回零:根据编码器记录的绝对位置信息,将电机移动到设定的零位。
(2)相对位置回零:通过设置一个相对距离,使电机从当前位置移动到零位。
(3)电子齿轮回零:利用电子齿轮功能,实现电机与负载的同步运动,从而达到回零目的。
4.设置回零速度根据实际需求,设置适当的回零速度。
过快的速度可能导致电机过冲,过慢的速度则会降低工作效率。
5.监控回零过程在回零过程中,实时监控电机的位置、速度等参数,以确保回零过程的顺利进行。
6.回零完成判定当电机到达设定的零位时,通过位置反馈信号判断回零是否完成。
此时,可以停止电机运行,并记录当前位置作为下次启动的零位。
四、注意事项1.在回零过程中,要确保通讯线路稳定,避免数据丢失或干扰。
2.根据实际应用场景,合理选择回零模式、速度等参数。
3.定期检查和校准编码器,确保位置信息的准确性。
台达专用canopen指令

台达专用canopen指令CANopen是一种基于CAN(控制器区域网络)协议的应用层标准,由国际机械电子工程师协会(CIOMS)制定。
它具有优良的性能和完善的功能,在数据传输与设备管理领域有着广泛的应用。
台达能源(Taida)是一家国际性的领先的数字系统技术研发机构,主要从事CANopen协议标准解决方案的开发和发展。
该公司专注于满足客户不断变化的需求,为客户提供台达专用CANopen指令。
台达专用CANopen指令用于控制CANopen控制装置,具备以下功能:(1)可实现CANopen控制装置节点之间的交互,控制控制设备和传感器,建立快速和可靠的通信网络,实现信息的可靠传输;(2)能够实现CANopen节点之间的多种数据传输,如实时数据的传输和历史数据的传输,实现数据的有效管理;(3)支持多种CANopen总线系统,可以实现多总线上的多节点的数据控制,包括控制的硬件设备和I/O模块;(4)可实现CANopen节点硬件设备的自动发现,支持多种CANopen节点设置,如节点名称设置、节点ID设置、数据点定义等;(5)可实现CANopen网络的节点配置,可以实现网络拓扑结构的构建、节点之间的设置联动,以及网络数据的同步更新,节点参数的实时监测等。
台达专用CANopen指令可以有效地满足客户多样化的需求,提高业务运作的效率和可靠性。
它的应用范围很广,主要应用于工业自动化系统、工厂现场管理等。
它可以实现设备之间的高速、实时、可靠的数据传输,保证系统的安全性和可靠性,提升了企业的运行效率和经济效益。
台达专用CANopen指令具有易用性、安全性和可靠性等多方面的优点,受到了越来越多的客户的好评。
随着信息化程度的不断提高,将会有更多的客户采用这种应用层标准,为客户提供更好的服务。
台达将会秉持着“技术为先,创新为本”的宗旨,不断创新技术,不断提高产品质量,为社会和客户创造更多的价值。
Canopen通信同毅伺服驱动操作流程20191206
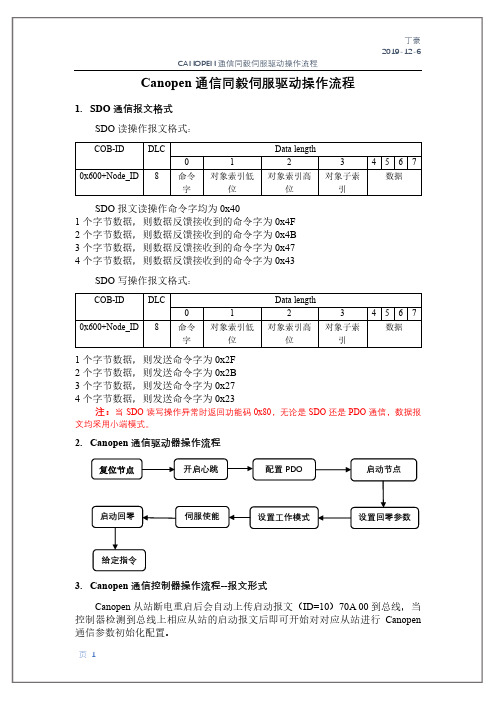
Canopen 通信同毅伺服驱动操作流程1. SDO 通信报文格式SDO 读操作报文格式:COB-ID DLCData length 01 2 3 4 5 6 70x600+Node_ID8命令字对象索引低位对象索引高位对象子索引数据SDO 报文读操作命令字均为0x401个字节数据,则数据反馈接收到的命令字为0x4F 2个字节数据,则数据反馈接收到的命令字为0x4B 3个字节数据,则数据反馈接收到的命令字为0x47 4个字节数据,则数据反馈接收到的命令字为0x43SDO 写操作报文格式:COB-ID DLCData length 01 2 3 4 5 6 70x600+Node_ID8命令字对象索引低位对象索引高位对象子索引数据1个字节数据,则发送命令字为0x2F 2个字节数据,则发送命令字为0x2B 3个字节数据,则发送命令字为0x27 4个字节数据,则发送命令字为0x23注:当SDO 读写操作异常时返回功能码0x80,无论是SDO 还是PDO 通信,数据报文均采用小端模式。
2. Canopen 通信驱动器操作流程3. Canopen 通信控制器操作流程--报文形式Canopen 从站断电重启后会自动上传启动报文(ID=10)70A 00到总线,当控制器检测到总线上相应从站的启动报文后即可开始对对应从站进行Canopen 通信参数初始化配置。
复位节点开启心跳配置PDO启动节点设置回零参数设置工作模式 伺服使能 启动回零 给定指令第一步:复为节点,发送网络管理报文复位节点,报文如下:帧ID 8个byte数据说明00 81 0A 复位节点第二步:通过SDO设置从站心跳时间200ms,报文如下帧ID 8个byte数据说明60A 2B 17 10 00 C8 00 00 00 设置心跳时间200ms第三步:配置PDO通信参数和映射参数,下面以RPDO1和TPDO1为例1800~1803是TPDO通信参数设置,子索引01的最高位为1表明该PDO无效,最高位为0表示该PDO有效TPDO1通信参数设置帧ID8个byte数据说明Step1 60A 23 00 18 01 8A 01 00 80 关闭TPDO1Step2 60A 2F 00 18 02 FF 00 00 00 传输类型:异步-255Step3 60A 2B 00 18 03 C8 00 00 00 禁止时间Step4 60A 2B 00 18 05 32 00 00 00 事件时间Step4 60A 23 00 18 01 8A 01 00 00 开启TPDO1TPDO1映射参数设置帧ID8个byte数据说明Step1 60A 2F 00 1A 00 00 00 00 00 TPDO1映射参数个数为0 Step2 60A 23 00 1A 01 10 00 41 60 映射参数1:6041Step3 60A 23 00 1A 02 10 00 3F 60 映射参数2:603FStep4 60A 2F 00 1A 00 02 00 00 00 TPDO1映射参数个数为2RPDO1映射参数设置帧ID8个byte数据说明Step1 60A 2F 00 16 00 00 00 00 00 RPDO1映射参数个数为0 Step2 60A 23 00 16 01 10 00 40 60 映射参数1:6040Step3 60A 23 00 16 02 08 00 60 60 映射参数2:6060Step4 60A 2F 00 16 00 02 00 00 00 RPDO1映射参数个数为2第四步:启动节点帧ID 8个byte数据说明00 01 0A 启动节点第五步:设置回零参数帧ID8个byte数据说明Step1 60A 2F 98 60 00 01 00 00 00 配置回零模式--6098Step2 60A 23 99 60 00 10 27 00 00 配置回零速度--6099Step3 60A 23 7C 60 00 00 00 08 00 设置回零偏置--607CStep4 60A 23 9A 60 00 F4 01 00 00 加减速时间500ms--609A第六步:设置工作模式帧ID 8个byte数据说明60A 2F 60 60 00 01 00 00 00位置模式第七步:伺服使能SDO伺服使能帧ID8个byte数据说明Step1 60A 2B 40 60 00 06 00 00 00 数据对象6040=0x0006Step2 60A 2B 40 60 00 07 00 00 00 数据对象6040=0x0007Step3 60A 2B 40 60 00 0F 00 00 00 数据对象6040=0x000F RPDO1伺服使能帧ID8个byte数据说明Step1 20A 06 00 数据对象6040=0x0006Step2 20A 07 00 数据对象6040=0x0007Step3 60A 0F 00 数据对象6040=0x000F第八步:启动回零SDO启动回零帧ID 8个byte数据说明60A2B 40 60 00 0F 80 00 00数据对象6040=0x800F RPDO1启动回零帧ID 8个byte数据说明20A0F 80数据对象6040=0x800F 注:回零完成标志位是状态字6041的Bit15,在使用增量编码器时必须回零完成后才可以进行绝对位置操作。
canopen控制伺服原理
canopen控制伺服原理CANopen是一种用于控制伺服系统的通信协议,它基于CAN总线技术,具有高效、可靠的特点。
本文将介绍CANopen控制伺服的原理。
CANopen协议是一种开放的通信协议,它定义了伺服系统中各个设备之间的通信规则和数据格式。
通过CAN总线,伺服控制器可以与伺服驱动器、编码器等设备进行数据交换和控制指令传输。
在CANopen控制伺服系统中,伺服控制器作为主节点,负责发送控制指令和接收反馈数据。
伺服驱动器、编码器等设备作为从节点,负责接收控制指令并执行相应的动作,并将执行结果反馈给主节点。
CANopen协议中定义了一系列的对象字典,用于存储和传输数据。
主节点可以通过读取和写入对象字典中的数据来实现对从节点的控制。
例如,主节点可以向伺服驱动器的对象字典中写入目标位置数据,驱动器接收到数据后会根据指令进行相应的运动。
CANopen协议还定义了一套标准的通信对象,包括PDO(Process Data Object)和SDO(Service Data Object)。
PDO用于实时传输数据,例如位置、速度等实时反馈数据;SDO用于配置和管理设备,例如设置驱动器的参数、读取编码器的分辨率等。
在CANopen控制伺服系统中,主节点通过发送PDO来实现实时控制和数据传输。
主节点可以根据需要配置PDO的传输周期和数据内容,从节点接收到PDO后会根据指令进行相应的动作,并将执行结果通过PDO反馈给主节点。
除了PDO和SDO,CANopen协议还定义了一些其他的通信对象,例如NMT(Network Management)对象用于管理网络中的节点状态,EMCY(Emergency)对象用于传输紧急事件信息等。
总之,CANopen是一种高效、可靠的通信协议,适用于控制伺服系统。
通过CAN总线,主节点可以与从节点进行数据交换和控制指令传输,实现对伺服系统的精确控制。
CANopen协议的对象字典和通信对象提供了丰富的功能,可以满足不同应用场景的需求。
台达专用canopen指令
台达专用canopen指令CanOpen是一种工业电子设备通信协议,它常用于控制和诊断机器或自动化系统。
这种协议可以提供一套编程规则,使得硬件更容易编程,从而能够管理和协调机器的各种功能。
CanOpen是一种直接的层次化的协议,它的结构更加精简,更易于实施和管理。
台达专用CanOpen指令台达是一家专业的变频器制造商,推出了一种新的智能控制产品系列台达专用的CanOpen指令。
这种指令可以实现变频器的各项功能,包括频率、电流限制、转矩等。
在使用CanOpen指令进行控制时,台达设备支持两种通信方式:CANopen总线和485 MODBUS RTU。
CanOpen总线是一种实时的专用通信总线,它支持高速数据传输,并且可以进行有线传输,实现台达设备的控制和监控。
而485 MODBUS RTU则是台达设备支持的一种总线通信标准,可以实现跨网络、跨环境控制。
台达变频器支持通过CANopen总线指令通信,包括 PDO(Process Data Objects)和 SDO(Service Data Objects)等。
PDO用于发送实时数据,主要用于实现台达设备的状态监控;而SDO则是台达设备支持的参数设定和修改指令,直接控制变频器的各项参数。
台达设备支持的485 MODBUS RTU指令,主要用于台达设备的配置和参数的读取和修改,以及状态的查询和诊断。
它也可以用于各种自动化系统的设备监控和控制,帮助用户实时了解设备的状态和运行情况。
台达智能设备的可编程性台达智能设备通过CanOpen总线和485 MODBUS RTU指令进行通信,可实现台达设备的可编程性。
通过台达变频器提供的智能控制和诊断功能,可以实现台达智能设备的可靠运行,并能够灵活处理复杂的工业应用。
同时,使用CanOpen指令和485 MODBUS RTU指令可实现对台达智能设备的更新和升级,以及实现台达设备的跨网络、跨环境控制。
结论台达变频器支持的CanOpen指令和485 MODBUS RTU指令可实现台达智能设备的可编程性,并可实现台达智能设备的可靠性,以及灵活处理复杂的工业应用。
台达PLC通讯控制伺服教程
4
A
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入
(1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
5
A
PDO配置
6
A
PDO配置 7
A
P4-07位控制定义8A9 NhomakorabeaA
10
A
11
A
伺服通过软件设置站号、通信格式、波 12 特率
属性设置为同步 P5-05 (回零第一段速) RX1401 P5-75 (运行速度) RX1401 P6-03 (运行位置) RX1402 P6-21 (待机位置) RX1402 读; P0-01 (伺服报警) TX1800 P0-09 (伺服当前位置) TX1800
以下
修改监控时间,延长通讯时间
A
5;显示外部给定目标位置
18
A
A
19
定位控制时P6-03为位置来源
1;点击原点复归模式
2;选择到路径10(路径10设置为回零点进行设置)
16
3;选TYPE路径型式
4;选位置命令
A
5;选运行速度
6;p621待机位给定目标位置
决对定位伺服软件设置: (决对定位路径1设置)
1;选择到路径10
2;选TYPE路径型式
17
3;选位置命令终点
4;选运行速度(选择PLC-PDO配置运行速度P5-75)
1
A
台达PLC以Canopen控制伺服
2
在线描硬件,
SDO自动配置
A
SDO配置内容
3
A
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401
台达专用canopen指令
台达专用canopen指令CANopen是一种建立在CAN总线基础上的应用层协议,由台达公司推出的自定义CANopen专用指令是支持它的有效控制协议。
台达的CANopen指令可以实现对设备的远程监控,可以实现状态查询、参数读取/写入、历史数据分析和服务器管理等应用功能,并具有可容错性、快速响应性和低功耗特性。
CANopen指令有效性台达的CANopen指令是一种有效的控制协议,其功能包括对设备远程控制、状态查询、参数读取/写入、历史数据分析和服务器管理等。
这是由于它具有容错性、快速响应性和低功耗特性,可以有效地降低设备运行和维护的成本,同时改善设备的安全性和稳定性。
台达的CANopen指令也大大简化了设备的网络架构,通过一个简单的CAN总线可以实现对多个设备的控制,节省了组态的时间和费用。
此外,它还具有节能特性,可以节省设备的能量消耗,从而降低使用成本。
台达专用CANopen指令应用台达专用CANopen指令可以应用于各种设备,包括温度控制器、监控报警器、手动控制面板、光学传感器、编码器等。
它可以实现设备的远程控制,让用户实时了解设备的状态,还可以方便地读取/写入设备参数,实现自动化控制功能。
台达的CANopen指令还可以用于检测设备故障,在设备出现问题时可以通过指令检测出故障原因,从而降低设备维护的成本。
此外,它还可以用作对设备历史数据的分析,以便了解设备运行情况,实现故障预警功能。
台达专用CANopen指令优势在使用台达的CANopen指令时,可以享受到许多优势:1. CANopen指令可以简化设备的网络架构,大大减少了组态时间和费用。
2.以实现同时对多个设备的远程控制,提高了设备操作效率。
3.有容错性、快速响应性和低功耗特性,降低设备运行和维护的成本。
4.现节能,减少设备的能量消耗,等等。
结论总之,台达的CANopen指令是一种有效的控制协议,可以实现对设备的远程监控、状态查询、参数读取/写入、历史数据分析和服务器管理等应用功能,并具有可容错性、快速响应性和低功耗特性,从而有效地改善设备的安全性和稳定性,提高设备操作效率,减少设备运行和维护的成本。
台达工控产品canopen解决方案

台达工控产品canopen解决方案台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
Abstract: In this paper, the solution in CANopen for Deltaindustrial products is presented, whichdisplays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络 (Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
canopen伺服电机的回零控制方法

canopen伺服电机的回零控制方法Canopen伺服电机作为一种高性能的电机控制系统,广泛应用于工业自动化领域。
回零控制是伺服电机控制中的一个重要环节,对于确保设备精度和效率具有重要意义。
本文将详细介绍Canopen伺服电机的回零控制方法。
一、Canopen伺服电机简介Canopen伺服电机是基于Canopen协议的伺服驱动系统,具有通信协议统一、实时性高、稳定性好等特点。
它主要由伺服驱动器、伺服电机和编码器组成。
在工业自动化设备中,Canopen伺服电机能够实现精确的位置、速度和扭矩控制。
二、回零控制原理回零控制是指让伺服电机从当前位置移动到设定的零位(或参考位置)的过程。
这个过程通常包括以下几个步骤:1.检测当前位置:通过编码器或其他传感器获取电机的当前位置。
2.计算回零路径:根据当前位置和设定的零位,计算电机需要移动的距离和方向。
3.执行回零运动:控制电机按照计算出的路径移动到零位。
4.确认零位:到达零位后,通过传感器或其他方式确认零位是否准确。
5.精确调整:在确认零位的基础上,进行微调以确保电机位置精度。
三、Canopen伺服电机回零控制方法1.手动回零:通过操作面板或上位机手动设置零位,然后让电机移动到该位置。
优点:操作简单,易于实现。
缺点:对操作人员技术要求较高,可能存在误差。
2.自动回零:利用Canopen协议中的PDO(过程数据对象)和服务数据对象(SDO)实现自动回零。
步骤如下:a.发送回零命令:通过上位机或控制器向伺服驱动器发送回零命令。
b.伺服驱动器接收命令后,自动执行回零程序。
c.回零过程中,通过PDO实时监控电机状态,确保回零过程顺利进行。
d.到达零位后,通过SDO确认零位并上传给上位机或控制器。
优点:自动化程度高,减少人为干预,提高效率。
缺点:对编程和调试有一定要求。
3.外部传感器辅助回零:使用外部传感器(如光电开关、接近开关等)辅助实现回零。
步骤如下:a.在零位附近安装外部传感器。
台达专用canopen指令
台达专用canopen指令
CANopen是基于CAN总线的一种应用层总线协议,它有良好的可扩展性,并且可以方便地结合多种不同的网络结构,可以满足大多数用户的需求。
它可以支持某些特定的设备,比如台达专用CANopen指令。
台达专用CANopen指令是指台达公司专用的CANopen应用层协议指令,它可以实现系统控制及网络通信功能的统一。
它能够将CANopen 的特性,如控制器的功能、控制结构、数据传输进行深度整合,满足客户对“台达系统”的各种定制需求,从而实现系统控制和网络通信功能。
台达专用CANopen指令拥有多种使用场景。
在工厂自动化方面,台达专用CANopen指令能够实现多台设备之间的无线连接,因此工厂自动化能够无缝集成,远程调节及监控,具备更佳的动态应用性。
对于特定的智能设备,如台达智能传感器,台达的CANopen指令也能够提供精确的定位机制,可以有效指导系统的行走,实现智能机器人的控制。
此外,台达的CANopen指令可以实现系统端到端的数据传输,可以实现多台设备之间的高速通信。
这种数据传输能够有效地减少在网络中数据传输的延迟,提高系统的工作效率,还可以支持多种应用,使系统的操作及管理更加便捷。
台达的CANopen指令能够为用户提供灵活的选择,满足不同环境的多样化需求。
它具有良好的可靠性和可扩展性,可以满足用户的个
性化需求,能够满足客户的各种定制需求,为智能制造提供技术支持。
总结起来,台达专用CANopen指令是一种非常有用的通信协议指令,它可以实现系统控制和网络通信功能,能够支持多种应用场景,满足用户的个性化需求,实现更高效的通信传输,为智能制造提供技术支持。
台达PLC通讯控制伺服教程
-
决对定位伺服软件设置: (决对定位路径1设置) 1;选择到路径10 2;选TYPE路径型式 3;选位置命令终点 4;选运行速度(选择PLC-PDO配置运行速度P5-75) 5;显示外部给定目标位置
-
-
-
定位控制时P6-03为位置来源
属性设置为同步 P5-05 (回零第一段速) RX1401 P5-75 (运行速度) RX1401 P6-03 (运行位置) RX1402 P6-21 (待机位置) RX1402 读; P0-01 (伺服报警) TX1800 P0-09 (伺服当前位置) TX1800
以下
修改监控时间,延长通讯时间
-
原点回归伺服软件设置:(原点复归模式设置) 1;点击原点复归模式 2;P-04原点复归模式选择X,Y,Z 3;原点复归速度设定,第一段p505速度设置,第二段速度 4;路径形式(选路径10)
-
原点回归伺服软件设置:(路径10设置) 1;点击原点复归模式 2;选择到路径10(路径10设置为回零点进行设置) 3;选TYPE路径型式 4;选位置命令 5;选运行速度 6;p621待机位给定目标位置
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入 (1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
-
PDO配置
-
PDO配置
-
P4-07位控制定义
-
-
-
-
伺服通过软件设置站号、通信格式、波 特率
-
电子齿轮比的设置
-
伺服软件DI/DO功能选择; A/B为常开、常闭切换。
-
台达PLC以Canopen控制伺服
在线描硬件,
台达伺服驱动器参数设置一览表

台达伺服驱动器参数设置⼀览表台达伺服驱动器的参数设置分为⼋⼤群组。
从P0到P7,参数群组定义如下:1. 群组 0:监控参数(例:P0-xx)2. 群组 1:基本参数(例:P1-xx)3. 群组 2:扩展参数(例:P2-xx)4. 群组 3:通讯参数(例:P3-xx)5. 群组 4:诊断参数(例:P4-xx)6. 群组 5:Motion 设定(例:P5-xx)7. 群组 6:Pr 路径定义(例:P6-xx)8. 群组 7:Pr 路径定义(例:P7-xx)台达伺服驱动器的控制模式有四种,分别如下:1. Pt 为位置控制模式(位置命令由端⼦输⼊)。
2. Pr 为位置控制模式(位置命令由内部寄存器提供)。
3. S 为速度控制模式。
4. T 为扭矩控制模式。
代号简称功能初始值单位适⽤控制模式PtPrS TP0-00★VER固件版本⼯⼚设定N/A O O O OP0-01■ALE驱动器错误状态显⽰(七段显⽰器)N/A N/A O O O O P0-02STS驱动器状态显⽰00N/A O O O O P0-03MON模拟输出监控01N/A O O O O P0-08★TSON伺服启动时间0Hour P0-09★CM1状态监控寄存器1N/A N/A O O O O P0-10★CM2状态监控寄存器2N/A N/A O O O O P0-11★CM3状态监控寄存器3N/A N/A O O O O P0-12★CM4状态监控寄存器4N/A N/A O O O O P0-13★CM5状态监控寄存器5N/A N/A O O O O P0-17CM1A选择状态监控寄存器1的显⽰内容0N/A P0-18CM2A选择状态监控寄存器2的显⽰内容0N/A P0-19CM3A选择状态监控寄存器3的显⽰内容0N/A P0-20CM4A选择状态监控寄存器4的显⽰内容0N/A P0-21CM5A选择状态监控寄存器5的显⽰内容0N/A P0-25MAP1映射参数#1不需初始化N/A O O O OP0-26MAP2映射参数#2不需初始化N/A O O O O不需初P0-27MAP3映射参数#3始化N/A O O O O P0-28MAP4映射参数#4不需初始化N/A O O O OP0-29MAP5映射参数#5不需初始化N/A O O O OP0-30MAP6映射参数#6不需初始化N/A O O O OP0-31MAP7映射参数#7不需初始化N/A O O O OP0-32MAP8映射参数# 8不需初始化N/A O O O O P0-35MAP1A映射参数 P0-25 的映射⽬标设定0x0N/A O O O O P0-36MAP2A映射参数 P0-26 的映射⽬标设定0x0N/A O O O O P0-37MAP3A映射参数 P0-27 的映射⽬标设定0x0N/A O O O O P0-38MAP4A映射参数 P0-28 的映射⽬标设定0x0N/A O O O O P0-39MAP5A映射参数 P0-29 的映射⽬标设定0x0N/A O O O O P0-40MAP6A映射参数 P0-30 的映射⽬标设定0x0N/A O O O O P0-41MAP7A映射参数 P0-31 的映射⽬标设定0x0N/A O O O O P0-42MAP8A映射参数 P0-32 的映射⽬标设定0x0N/A O O O O 0N/A O O O OP1-04MON1MON1 模拟监控输出⽐例100%(fullscale)O O O OP1-05MON2MON2 模拟监控输出⽐例100%(fullscale)O O O OP1-06SFLT模拟速度指令加减速平滑常数0msec O P1-07TFLT模拟扭矩指令平滑常数0msec OP1-08PFLT位置指令平滑常数010msecO O P1-25VSF1低频抑振频率(1)100.00.1Hz O O P1-26VSG1低频抑振增益(1)0N/A O O P1-27VSF2低频抑振频率(2)100.00.1Hz O O P1-28VSG2低频抑振增益(2)0N/A O O P1-29AVSM⾃动低频抑振模式设定0N/A O O P1-30VCL低频摆动检测准位500pulse O O P1-34TACC速度加速常数200msec O O P1-35TDEC速度减速常数200msec O O P1-36TSL S 形加减速平滑常数0msec O O P1-59MFLT模拟速度指令线性滤波常数00.1ms O P1-62FRCL摩擦⼒补偿0%O O O O P1-63FRCT摩擦⼒补偿0ms O O O O P1-68PFLT2位置命令 Moving Filter0ms O O P1-75FELP 全闭环位置检测器与半闭环位置检测器误差低通滤波器时间常数100msec O O P2-23NCF1共振抑制 Notch filter(1)1000Hz O O O O P2-24DPH1共振抑制 Notch filter 衰减率(1) 0dB O O O O P2-43NCF2共振抑制 Notch filter(2)1000Hz O O O O P2-44DPH2共振抑制 Notch filter 衰减率(2) 0dB O O O O P2-45NCF3共振抑制 Notch filter(3)1000Hz O O O O P2-46DPH3共振抑制 Notch filter 衰减率(3) 0dB O O O OP2-47ANCF⾃动共振抑制模式设定1N/A O O O O P2-48ANCL⾃动共振抑制灵敏度设定100N/A O O O OP2-25NLP共振抑制低通滤波 2 or 50.1ms O O O O P2-33▲INF输⼊滤波器简易设定0N/A O O O O P2-49SJIT速度检测滤波及微振抑制0sec O O O O P2-00KPP位置控制增益35rad/s O O P2-01PPR位置控制增益变动⽐率100%O O P2-02PFG位置前馈增益50%O O P2-03PFF位置前馈增益平滑常数5msec O O P2-04KVP速度控制增益500rad/s O O O O P2-05SPR速度控制增益变动⽐率100%O O O O P2-06KVI速度积分补偿100rad/s O O O O P2-07KVF速度前馈增益0%O O O O P2-26DST外部⼲扰抵抗增益00.001O O O O P2-27GCC增益切换条件及切换⽅式选择0N/A O O O OP2-28GUT增益切换时间常数1010msecO O O OP2-29GPE增益切换条件1280000pulseKppsr/minO O O OP2-31■AUT1⾃动及半⾃动模式设定80Hz O O O O P2-32▲AUT2增益调整⽅式0N/A O O O OP1-01●CTL控制模式及控制命令输⼊源设定0pulser/min N-MO O O OP1-02▲PSTL速度及扭矩限制设定0N/A O O O O P1-12 ~P1-14TQ1 ~ 3内部扭矩限制 1 ~ 3100%O O O O P1-46▲GR3检出器输出脉冲数设定2500pulse O O O O P1-55MSPD最⼤速度限制rated r/min O O O OPulseP1-72FRES光学尺全闭环的分辨率5000/rev O O P1-73FERR光学尺全闭环反馈位置和电机编码器之间位置误差过⼤的错误保护范围30000pulse O O P1-74FCON光学尺全闭环功能控制开关000h-O O P2-50DCLR脉冲清除模式0N/A O O 外部脉冲控制命令(Pt mode)P1-00▲PTT外部脉冲列输⼊型式设定0x2N/A O P1-44▲GR1电⼦齿轮⽐分⼦(N1)1pulse O O P1-45▲GR2电⼦齿轮⽐分母(M)1pulse O O P2-60▲GR4电⼦齿轮⽐分⼦(N2)1pulse O O P2-61▲GR5电⼦齿轮⽐分⼦(N3)1pulse O O P2-62▲GR6电⼦齿轮⽐分⼦(N4)1pulse O O 内部暂控制命令(Pr mode)P6-02 ~ P7-27PO1 ~PO63内部位置指令 1 ~ 630N/A O P5-60 ~ P5-75POV1 ~POV15内部位置指令控制 0 ~ 15 的移动速度设定20 ~30000.1r/min O P5-03PDEC事件的减速时间0XF00FFFFFN/A O O O OP5-04HMOV原点回归模式0N/A O O P5-05HSPD1第⼀段⾼速原点回归速度1000.1r/minO O O OP5-06HSPD2第⼆段低速原点回归速度设定200.1r/minO O O OP5-07PRCM Pr 命令触发寄存器0N/A O P5-20 ~ P5-35AC0 ~AC15加/减速时间200 ~30ms O P5-40 ~ P5-55DLY0 ~DLY15位置到达之后的 Delay 时间0 ~5500ms O P5-98EVON事件上沿触发 Pr 程序编号0N/A O P5-99EVOF事件下沿触发 Pr 程序编号0N/A O 设定0x0N/A O O O O P5-16AXEN轴位置-电机编码器N/A N/A O O O O P5-17AXPC轴位置-脉冲命令N/A N/A O O O O P5-18AXAU轴位置-辅助编码器N/A N/A O O O O P5-08SWLP软件极限:正向+231PUU O P5-09SWLN软件极限:反向-231PUU O P1-01●CTL控制模式及控制命令输⼊源设定0pulser/min N-MO O O OP1-02▲PSTL速度及扭矩限制设定0N/A O O O O P1-46▲GR3检出器输出脉冲数设定1pulse O O O O P1-55MSPD最⼤速度限制rated r/min O O O O P1-09 ~10000.1P1-11SP1 ~ 3内部速度指令 1 ~ 3~ 3000r/min O O P1-12 ~P1-14TQ1 ~ 3内部扭矩限制 1 ~ 3100%O O O O P1-40▲VCM模拟速度指令最⼤回转速度rated r/min O O P1-41▲TCM模拟扭矩限制最⼤输出100%O O O O 定5500r/min O O O O P2-63TSCA⽐例值设定0times O O O P2-64TLMOD扭矩混合限制模式0N/A O O O P1-01●CTL控制模式及控制命令输⼊源设定0pulser/min N-MO O O OP1-02▲PSTL速度及扭矩限制设定0N/A O O O O P1-46▲GR3检出器输出脉冲数设定1pulse O O O O P1-55MSPD最⼤速度限制rated r/min O O O OP1-09 ~ P1-11SP1~3内部速度限制 1~3100~ 300r/min O OP1-12~ P1-14TQ1~3内部扭矩指令 1~3100%O O O O P1-40▲VCM模拟速度限制最⼤回转速度rated r/min O O P1-41▲TCM模拟扭矩指令最⼤输出100%O O O O P3-00●ADR站号设定0x7F N/A O O O O P3-01BRT通讯传输率0x0203bps O O O O P3-02PTL通讯协议6N/A O O O O P3-03FLT通讯错误处置0N/A O O O O P3-04CWD通讯超时设定0sec O O O O P3-05CMM通讯功能0N/A O O O O P3-06■SDI输⼊接点(DI)来源控制开关0N/A O O O O P3-07CDT通讯回复延迟时间01ms O O O O P3-08MNS监视模式0000N/A O O O O P3-09SYC CANopen 同步设定0x57A1N/A O O O O (★) 唯读寄存器,只能读取状态值,例如:P0-00、P0-10 及P4-00 等(▲) Servo On 伺服启动时⽆法设定,例如:P1-00、P1-46 及P2-33 等(●) 必须重新开关机参数才有效,例如:P1-01 及P3-00(■) 断电后此参数不记忆设定的内容值,例如:P2-31 及P3-06返回列表。
台达CANopen通讯伺服速度S控制
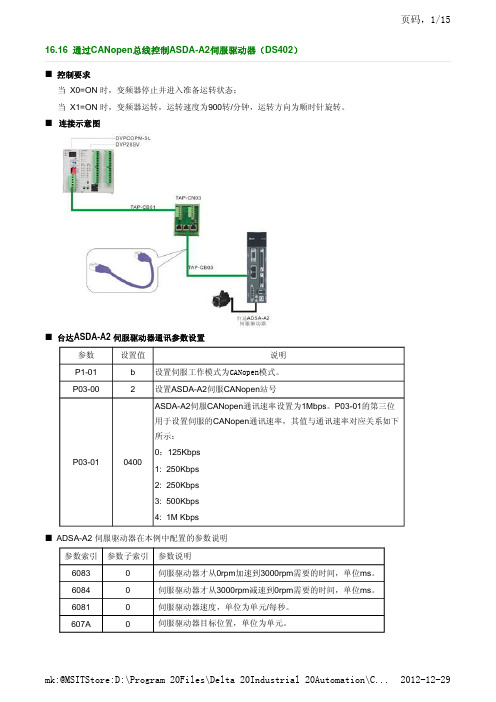
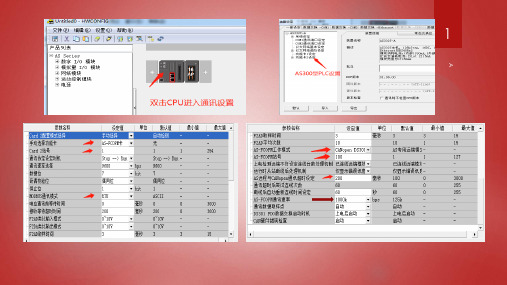
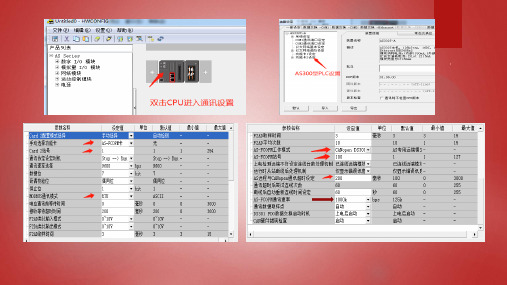
16.16 通过CANopen 总线控制ASDA-A2伺服驱动器(DS402)¢ 控制要求当 X0=ON 时,变频器停止并进入准备运转状态;当 X1=ON 时,变频器运转,运转速度为900转/分钟,运转方向为顺时针旋转。
¢ 连接示意图¢ 台达ASDA-A2 伺服驱动器通讯参数设置¢ ADSA-A2 伺服驱动器在本例中配置的参数说明参数 设置值 说明P1-01 b 设置伺服工作模式为CANopen模式。
P03-002设置ASDA-A2伺服CANopen 站号P03-01 0400ASDA-A2伺服CANopen 通讯速率设置为1Mbps 。
P03-01的第三位用于设置伺服的CANopen 通讯速率,其值与通讯速率对应关系如下所示:0:125Kbps 1: 250Kbps 2: 250Kbps 3: 500Kbps 4: 1M Kbps参数索引 参数子索引 参数说明 6083 0 伺服驱动器才从0rpm 加速到3000rpm 需要的时间,单位ms 。
6084 0 伺服驱动器才从3000rpm 减速到0rpm 需要的时间,单位ms 。
6081 0 伺服驱动器速度,单位为单元/每秒。
607A 0伺服驱动器目标位置,单位为单元。
¢模块设置按照下表分别对DVPCOPM-SL扫描模块进行设置模块名称节点地址通讯速率DVPCOPM-SL 扫描模块011M bpsASDA-A2伺服驱动器021M bps¢使用 CANopen 网络配置工具配置网络1. 打开 CANopenBuilder 软件,软件界面如下图所示。
2. 选择『设置(S)』菜单,点击『通讯设置』,选择『串口设置』指令。
3. 在此对计算机与 SV 主机的通讯参数进行设置。
如”通讯端口”、”通讯地址”、”通讯速率”、”通讯格式”。
项目说明默认值当计算机连接的设备为DVPCOPM-SL时,接注:CANopenBuilder 组态软件中的通讯速度,数据位,校验位,停止位以及模式的选择须与 SV PLC 主机设置一致。
canopen控制伺服原理

canopen控制伺服原理CANopen是一种通信协议,广泛应用于自动化控制领域。
它具有高性能、高可靠性和强大的实时性能等特点,被广泛用于控制伺服系统。
本文将介绍CANopen控制伺服原理,并深入探讨其工作原理和应用。
一、CANopen简介CANopen是一种基于CAN总线的通信协议,它定义了一组标准的对象、通信参数和服务,用于设备之间的数据交换和控制。
它支持多种不同类型的设备,包括伺服驱动器、传感器、控制器等。
CANopen的优势在于其高实时性和可靠性,能够满足复杂控制系统的需求。
二、CANopen在伺服控制中的应用在伺服系统中,CANopen被广泛应用于控制伺服驱动器的运动和位置。
通过CANopen,可以实现对伺服驱动器的参数设置、状态监测和故障诊断等功能。
下面我们将具体介绍CANopen在伺服控制中的应用原理。
1. 参数设置CANopen协议定义了一些用于设置伺服驱动器参数的对象,如PID参数、位置限制等。
通过CANopen主站发送相应的指令,可以实现对伺服驱动器参数的实时设置。
2. 位置控制通过CANopen,可以实现对伺服驱动器的位置控制。
主站发送相应的指令,驱动器接收到指令后,根据设定的位置模式和目标位置,控制伺服电机的运动,并实时反馈当前位置信息。
3. 速度控制CANopen还支持对伺服电机的速度控制。
主站发送速度指令,驱动器接收后,根据设置的速度模式和目标速度,调节伺服电机的运行速度,并实时反馈当前速度信息。
4. 状态监测通过CANopen,可以实时监测伺服驱动器的状态,包括电机转速、电流、温度等参数。
这些参数可以以对象的形式在CANopen网络中传输,方便用户进行实时的状态监测和诊断。
5. 故障诊断CANopen协议定义了一套标准的故障代码,用于诊断和报告故障信息。
当伺服驱动器发生故障时,通过CANopen网络,可以将故障代码传输给主站,方便用户进行及时的故障诊断和处理。
三、CANopen控制伺服原理解析CANopen控制伺服原理是基于CAN总线的分布式控制系统。
台达PLC通讯控制伺服教程

台达PLC通讯控制伺服教程台达PLC(可编程逻辑控制器)是一种常用的自动控制设备,用于工业生产中的机器和设备控制。
PLC通讯控制伺服是一种常见的控制方案,它结合了PLC和伺服驱动器,实现对伺服系统的精确控制。
下面将从PLC 与伺服的基础知识、PLC通讯控制伺服的优势、PLC通讯控制伺服的流程等几个方面,介绍台达PLC通讯控制伺服的教程。
首先,需要了解PLC与伺服的基础知识。
PLC是一种以电子数字运算为基础,可编程存储器为控制内核,外围设有各种电气接口装置,专门用于工业自动控制的电子设备。
而伺服是一种精密的电机控制系统,通过伺服驱动器将输入指令转化为特定的电流、电压或脉冲信号,控制伺服电机转动,从而实现自动控制。
接下来,我们来介绍PLC通讯控制伺服的优势。
PLC通讯控制伺服可以实现高精度的位置、速度和力控制,对于需要精确控制的工业自动化设备非常重要。
另外,PLC具有较高的可编程性和灵活性,可以根据不同的控制需求进行编程,适用于各种复杂的控制应用。
此外,PLC还可以与其他设备进行通讯,实现数据共享和协同控制,提高生产效率和灵活性。
然后,我们来介绍PLC通讯控制伺服的流程。
首先,需要在PLC中设置与伺服驱动器的通讯参数,包括通讯协议、通讯地址等。
然后,编写PLC程序,实现对伺服驱动器的控制指令,包括位置控制、速度控制、力控制等。
在编写程序时需要考虑到伺服系统的特性和控制要求,以确保控制效果的准确和稳定。
接下来,运行PLC程序,与伺服驱动器建立通讯连接,发送控制指令,实现对伺服系统的控制。
在控制过程中,可以通过监控和调试功能对控制效果进行实时监测和调整,以达到预期的控制效果。
最后,需要注意的是,在实施PLC通讯控制伺服之前,需要充分了解伺服系统的技术规格和控制要求,选择适合的PLC和伺服驱动器,并进行相关的参数设置和通讯配置。
此外,在编写PLC程序时,需要考虑到系统的稳定性和可靠性,尽量避免因程序错误而导致设备故障或生产事故。
台达工控产品CANopen解决方案

台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
Abstract: In this paper, the solution in CANopen for Delta industrial products is presented, which displays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络(Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
A.DVPCOPM-SL具备特性为:●CANopen通讯主站,可连接127个站点;●最快通讯速率达到1M bps;●最长的网络长度可支持1000m(配合合适的通讯速率和物理线材);●具有同步和异步的通讯能力;B.C2000具备的特性为:●支持CANopen主站连接(仍在测试中);●CANopen通讯直接连接无需转换;●最快通讯速率达到1M bps;●By Pass连接功能(搭配外部扩展卡);C.A2具备的特性为:●最快通讯速率达到1M bps;●CANopen通讯直接连接无需转换;●无需外部扩展卡,完全内建;●By pass 连接功能;D.E-C具备的特性为:●最快通讯速度达到1M bps;●CANopen通讯直接连接无需转换;●无需外部扩展卡,完全内建;可以看出,台达工控产品中,真正能实现CANopen直接通讯的非控制类产品目前为C2000变频器、A2伺服驱动器以及E-C变频器,之所以称为直接通讯是因为其无需通讯模式的转换,而直接采用CANopen物理连接。
台达伺服电机说明书

台达伺服电机说明书台达伺服电机说明书一、产品概述台达伺服电机是一种高精度、高可靠性的电动机,具有快速响应、精准控制等特点。
它广泛应用于数控机床、自动化生产线、印刷设备等领域。
二、产品参数1. 额定功率:0.1 kW - 55 kW2. 额定转速:1500 rpm - 6000 rpm3. 额定扭矩:0.3 Nm - 200 Nm4. 控制方式:位置控制、速度控制、扭矩控制5. 通讯接口:RS485、CANopen、EtherCAT等三、产品特点1. 高精度:采用数字式控制技术,能够实现高精度的位置控制和速度控制。
2. 快速响应:响应时间小于1ms,能够快速适应不同的工作负载。
3. 多种保护功能:具有过载保护、过热保护等多种保护功能,确保电机安全运行。
4. 多种通讯接口:支持RS485、CANopen、EtherCAT等多种通讯接口,方便与其他设备进行联网。
5. 可编程性强:具有丰富的编程功能,支持多种编程语言,方便用户进行二次开发。
四、产品安装1. 安装前准备在安装前,需要对电机进行检查,确保电机无损坏、无异响等异常情况。
同时还需检查电源线路是否正确接好。
2. 安装步骤(1)确定安装位置:根据实际需要确定电机的安装位置,确保电机能够正常运转,并且方便维护。
(2)固定电机:将电机固定在安装位置上,并且确保固定牢固。
(3)连接电源线路:根据实际需要连接电源线路,并且确保接线正确。
(4)连接控制器:将伺服控制器与伺服电机进行连接,并且按照说明书进行设置和调试。
五、产品调试在安装完成后,需要对伺服系统进行调试。
具体步骤如下:1. 伺服参数设置根据实际需要设置伺服参数,包括速度、加速度、减速度等参数。
同时还需设置伺服模式和通讯接口等相关参数。
2. 运动控制测试在设置完成后,进行运动控制测试。
通过测试可以了解到伺服系统的性能表现和响应速度等情况。
3. 优化调试根据测试结果,对伺服系统进行优化调试,以达到最佳的运动控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
16.16 通过CANopen 总线控制ASDA-A2伺服驱动器(DS402)¢ 控制要求当 X0=ON 时,变频器停止并进入准备运转状态;当 X1=ON 时,变频器运转,运转速度为900转/分钟,运转方向为顺时针旋转。
¢ 连接示意图¢ 台达ASDA-A2 伺服驱动器通讯参数设置¢ ADSA-A2 伺服驱动器在本例中配置的参数说明参数 设置值 说明P1-01 b 设置伺服工作模式为CANopen模式。
P03-002设置ASDA-A2伺服CANopen 站号P03-01 0400ASDA-A2伺服CANopen 通讯速率设置为1Mbps 。
P03-01的第三位用于设置伺服的CANopen 通讯速率,其值与通讯速率对应关系如下所示:0:125Kbps 1: 250Kbps 2: 250Kbps 3: 500Kbps 4: 1M Kbps参数索引 参数子索引 参数说明 6083 0 伺服驱动器才从0rpm 加速到3000rpm 需要的时间,单位ms 。
6084 0 伺服驱动器才从3000rpm 减速到0rpm 需要的时间,单位ms 。
6081 0 伺服驱动器速度,单位为单元/每秒。
607A 0伺服驱动器目标位置,单位为单元。
¢模块设置按照下表分别对DVPCOPM-SL扫描模块进行设置模块名称节点地址通讯速率DVPCOPM-SL 扫描模块011M bpsASDA-A2伺服驱动器021M bps¢使用 CANopen 网络配置工具配置网络1. 打开 CANopenBuilder 软件,软件界面如下图所示。
2. 选择『设置(S)』菜单,点击『通讯设置』,选择『串口设置』指令。
3. 在此对计算机与 SV 主机的通讯参数进行设置。
如”通讯端口”、”通讯地址”、”通讯速率”、”通讯格式”。
项目说明默认值当计算机连接的设备为DVPCOPM-SL时,接注:CANopenBuilder 组态软件中的通讯速度,数据位,校验位,停止位以及模式的选择须与 SV PLC 主机设置一致。
设置正确后,点击『确定』按钮,返回主界面。
4. 选择『网络(N )』菜单,点击『在线』指令。
接口 口选择Via PLC Port ;当计算机连接的设备为DVP10MC11T 时,接口选择Via Local Port 。
无 COM 口 选择与SV PLC 通讯的计算机通讯口 COM1 通讯地址 输入SV PLC 的modbus 站号 01 通讯速度 选择计算机与SV PLC 通讯的通讯速率9600 bps 数据位 选择计算机与SV PLC 通讯的通讯协议 7校验位 偶校验 停止位 1模式选择计算机与SV PLC 的通讯模式 ASCII Mode5. 弹出下图所示窗口。
6. 按『确定』对 CANopen 网络进行扫描,正常情况下弹出扫描进度条,如下图所示。
按『取消』返回主画面。
7.如果上述对话框的进度条一直没有动作,则说明 PC 和 SV PLC 通讯连接不正常或PC上有其他程序使用串口。
扫描结束后,会提示”扫描网络已完成”。
此时,网络中被扫描到的所有节点的图标和设备名称都会显示在软件界面上,如下图所示。
在此例中 DVPCOPM 的节点地址为01。
Ø主站参数设置1. 选择『网络(N)』菜单,点击『主站参数』选项,弹出下图所示窗口工作模式:选择DVPCOPM-SL模块的工作模式,可选择Master Mode或Slave Mode,本例中为Master Mode 。
同步周期:当从站PDO传输类型为同步传输时,须在此设置同步周期。
本例PDO传输采用异步传输,故可不考虑此参数。
主站heartbeat时间:设定DVPCOPM-SL主站发送心跳报文的周期。
本例中设为200 ms。
设定参数值后,点击『确定』。
Ø从站参数设置1. 双击 ASDA-A2 变频器的图标,跳出如图所示画面。
2. 配置PDO:添加PDO:在“EDS文件提供的PDO”一栏中选择某一PDO,双击该PDO或点击右侧的“添加”按钮,可将选择的PDO添加到“已配置的PDO”中。
删除PDO:在“已配置的PDO”一栏中,选择某一PDO,点击右侧的“删除”按钮,可将选择的PDO从“已配置的PDO”中删除。
PDO映射:在“已配置的PDO”一栏中,选择某一PDO,双击该PDO或点击右侧的“PDO映射”按钮,会弹出“PDO映射…”对话框,如下图所示。
从站设备的所有参数都显示在“EDS提供的参数”一栏内。
选择“EDS提供的参数”一栏中的某一参数,点击按钮可将该参数添加至“已映 射的参数”一栏内;选择“已映射的参数”一栏中的某一参数,点击按钮可将该参数从“已映射的参数”一栏内删除。
PDO属性:在“已配置的 PDO”一栏中,选择某一PDO,点击右侧的“属性”按钮,会弹出如下所示界面。
在此界面中可设置 COB-ID 以及 PDO 的传输类型,及采用异步传输时 TxPDO 的 Event timer。
PDO的COB-ID规则如下表:RxPDO编号COB-ID(HEX)TxPDO编号COB-ID(HEX)RxPDO1200+从站站号TxPDO1180+从站站号RxPDO2300+从站站号TxPDO2280+从站站号RxPDO3400+从站站号TxPDO3380+从站站号RxPDO4500+从站站号TxPDO4480+从站站号本例中参数配置如下:RxPDO1 映射的参数如下:RxPD02 映射的参数如下:RxPD03 映射的参数如下:TxPDO1 映射的参数如下:如下图所示,RxPDO 和 TXPDO 的传输类型选择255(异步模式)。
本例中,选择 Heartbeat 协议,“主站监控超时时间”设为 200 ms ,“从站 Heartbeat 产生时间”设为100ms 。
设定参数后,点击『确认』按钮后返回“节点配置…”对话框。
4. 自动PDO 配置u 在“节点配置”界面中点击“自动SDO 配置”按钮,进入如下界面。
项目NodeGuarding Guard 时间主站按 Guard Time 设定的时间间隔去轮询从站, 当选择“Heartbeat ”后,就不能再选择“Node Guarding ”LifeTime Factor Life Time 因子,Life time= Guard time x LifeTime factor 。
如果从站在 Life Time 时间内没有被主站轮询到,主站就认为该从站掉线。
Heartbeat 从站Heartbeat产生时间从站按“从站 Heartbeat 产生时间”周期发送 Heartbeat 报文给主站。
主站监控超时时间要大于从站 Heartbeat 产时间。
主站监控超时时间如果主站在“主站监控超时时间”没有收到从站的Heartbeat 报文,主站就认为该从站掉线。
节点列表 CANopen 网络中配置的所有节点都显示在节点列表内。
无Heartbeat 监控 配置此“错误控制设定”的节点可以监控“Heartbeat 监控”栏内配置的节点是否掉线。
“Heartbeat 监控”栏内只能配置一个节点按钮 选择“节点列表”一栏内的某一节点,点击 按钮可将选择的节点添加到“Heartbeat 监控”一栏内;无 按钮 选择“Heartbeat 监控”一栏内的某一节点,点击按钮可将选择的节点从“Heartbeat 监控”一栏内删除。
无 编辑按钮 选择“Heartbeat 监控”一栏内的某一节点,点击“编辑”按钮可以更改监控时间。
无 确认按钮 点击“确认”按钮后返回“节点配置”对话框,“错误控制设定”对话框内设置的参数被保存。
无 取消按钮 点击“取消”按钮后返回“节点配置”对话框,“错误控制设定”对话框内设置的参数无效。
无u在“自动SDO配置”界面中,点击“添加”按钮出现下图所示的画面,Index, Sub-index等参数可通过键盘输入。
u在“自动SDO配置”界面中,选中某一添加的参数,选择“编辑”按钮可以进行编辑,选择“删除”按钮可将选中的参数删除。
SDO添加完毕后。
点击下图所示的确定按钮返回“节点配置”对话框。
注:本范例中用以设置ASDA-A2伺服的电子齿轮比为128/1,6093/01(索引/子索引)为电子齿轮比分子,6093/02(索引/子索引)为电子齿轮比分母。
自动SDO参数值会在从站进入运行状态前写入从站。
5. 所有参数设置完成后,在“节点配置…”界面中点击“确定”。
Ø节点列表配置1.双击“DVPCOPM Master”图标,弹出如图所示的“节点列表配置”对话框。
可以看到左边的列表中有当前可用节点ASDA-A2 Drivers 图标。
右边有一个空的“节点列表”。
2. 选中ASDA-A2 Drivers,点击“>”,将该从站加入节点列表。
在下方的输入输出映射表中看到从站的 IO 数据对应到SV主机内的 D 寄存器地址。
如图所示3.确认无误后,点击『确定』按钮,然后将配置下载到DVPCOPM-SL主站模块内。
下载时,如果 SV主机处于RUN模式,会弹出“警告”对话框,如图所示:4. 点击『是』按钮,将配置下载至主站模块,确认PLC 处于RUN 模式。
¢ 主站PLC 和从站设备的IO 数据映射DVPCOPM-SL Master → 从站设备从站设备 → DVPCOPM-SL 主站模块¢ 保存配置数据选择『文件(F )』菜单中『保存(S)』命令,将当前的网络配置保存。
DVPCOPM-SL 主站模块寄存器 CANopen 总线数据传输 从站设备元件装置D6282H 伺服驱动器加速时间低字高字节D6282L 伺服驱动器加速时间低字高字节D6283H 伺服驱动器加速时间高字高字节D6283L 伺服驱动器加速时间高字低字节D6284H 伺服驱动器减速时间低字高字节D6284L 伺服驱动器减速时间低字高字节D6285H 伺服驱动器减速时间高字高字节D6285L 伺服驱动器减速时间高字低字节D6286H 伺服驱动器目标位置低字高字节D6286L 伺服驱动器目标位置低字高字节D6287H 伺服驱动器目标位置高字高字节D6287L 伺服驱动器目标位置高字低字节D6288H 伺服驱动器目标速度低字高字节D6288L 伺服驱动器目标速度低字高字节D6289H 伺服驱动器目标速度高字高字节D6289L 伺服驱动器目标速度高字低字节D6290H 伺服驱动器控制模式选择D6290L 伺服驱动器控制模式选择D6291H 伺服驱动器控制字高字节D6291L 伺服驱动器控制字低字节DVPCOPM-SL 主站模块寄存器 CANopen 总线数据传输 从站设备元件装置D6032H 伺服驱动器状态字高字节D6032L 伺服驱动器状态字低字节D6033H 伺服驱动器当前位置低字高字节D6033L 伺服驱动器当前位置低字低字节D6034H 伺服驱动器当前位置高字高字节D6034L 伺服驱动器当前位置高字低字节页码,14/15页码,15/15¢CANopen 网络控制本节将介绍如何编写 WPL 程序实现 CANopen 网络的控制要求。