台达位置与扭矩模式伺服电机文档
台达位置与扭矩模式伺服电机文档

台达ASD-B2伺服ECMA-C20401GS电机控制文档一.扭矩模式1.说明:此扭矩模式是用于外部控制器控制输入给伺服器的电压来实现电机扭矩大小的输出。
2.接线:将控制器控制的能输出可变电压的引脚直接连接到CN1的18引脚,将控制器的GND与伺服器CN1的19脚连接3.参数设定:P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013的预警状态。
P1-01:03,将电机设定为转矩模式P1-02:01,速度限制,电机在没有负载的情况下会转很快P1-07:500,设置电机加减速的时间,减少通电与断电的时对于轴与外设的冲击P1-09=设定电机最高转速P2-12:00,将TCM0设定为0P2-13:00,将TCM1设定为0P2-12与P2-13的作用是将扭矩的命令设定为外部电压来控制。
详情见数据手册144页6.4.1P2-14:14,设定速度,当不设定此项时,电机只有力矩,没有转速P1-41:200,表示输入5V模拟电压,达到100%额定转矩P2-10:01,启动电机当此时电机不转时,重启伺服器即可。
(建议重启)要关闭电机则将P2-10设定为00,并保存,然后将开关关闭并重启即可完成电机的关闭。
二.位置模式1.说明:当前位置模式是通过外部控制器输出的PWM来控制伺服电机的位置以及速度,其中PWM频率控制电机速度,PWM的个数与P1-44与P1-45的结合控制电机的具体位置。
使用的脉冲输入为开集极NPN设备输入,电源为内部24v电源。
2.接线:上图中的白线是控制器的脉冲输出线,用于输出PWM,蓝色线是控制板的GND的连接线,用于控制器与伺服器的共地作用。
上图是伺服器CN1的接线,其中褐色线是CN1的41引脚,其中的PWM信号是控制器的PWM输出的引脚串接一个1.5K电阻通过一个NPN三极管之后连接到CN1的引脚。
其中控制器的pwm输出引脚连接NPN三极管的基极,三极管的发射极连接CN1的14脚(COM-),集电极连接到41引脚。
台达伺服说明书

台达伺服说明书台达伺服说明书篇一:各伺服接线说明东源伺服 TSTK 50P主伺服引脚定义摇伺服引脚定义摇床伺服端引脚定义控制端伺服参数主伺服摇伺服东能伺服EPS36P摇床伺服端引脚定义控制端埃斯顿伺服ED主伺服引脚定义36P 摇伺服引脚定义20P主伺服端引脚定义控制端摇床伺服端引脚定义控制端英迈克伺服摇床伺服端引脚定义控制端台达伺服摇床伺服端引脚定义控制端台达伺服说明书篇二:台达伺服电机作往复运动方案说明台达伺服电机作1800mm往复运动我用的台达伺服电机作1800mm往复运动。
电机配1:30的减速器带动同步带轮(带轮直径是130mm),如何计算所发脉冲个数,伺服电机的额定转速是3000r/m,那所发最大脉冲频率是多少呢, 如何计算呢。
有公式吗带轮直径是130mm那伺服电机带减速机输出端转一圈就是3.14*130=376.8mm,您需要在1800的行程内做往返运动,1800/376.8=4.777圈。
这里没有说明需要一趟1800mm的时间,假设您需要10s来完成一个1800mm,那么减速机10S完成4.777圈。
减速机输出转速=4.777/10*60=28.66r/min,这个转速在3000/30=100R/min以内,所以是可行的。
伺服电机转速就是28.66*30=859.8r/min。
您问的是脉冲频率,那就是用伺服电机的位置控制模式。
台达伺服应该是也10000ppr的分辨率,也就是走一圈要10000个脉冲。
根据驱动器里的电子齿轮比设置,假设分子分母都是1,那么控制器需要发10000个脉冲电机走一圈。
10000*859.8/60=143300HZ,也就是14K左右的频率。
如果电子齿轮比设置为2,那就需要7K左右的频率。
台达伺服说明书篇三:【伺服系统】自学手册一、伺服系统概述1、行业包装是潜力最大的行业市场,印刷行业也是潜力较大行业。
同时,伺服产品在玻璃加工、汽车、医疗设备、通信、安防、仪器和试验装置上也大量使用。
台达B2伺服电机参数调节
台达B2伺服电机参数调节简介本文档旨在提供有关台达B2伺服电机参数调节的指导。
台达B2伺服电机是一种高性能的伺服驱动器,通过调整其参数可以实现更好的运行性能和精确度。
参数调节方法以下是台达B2伺服电机参数调节的方法:1. 位置模式参数调节:位置模式参数调节:- 位置环参数P:该参数用于控制伺服电机在位置模式下的位置准确性。
较高的P值可以提高位置响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
位置环参数P:该参数用于控制伺服电机在位置模式下的位置准确性。
较高的P值可以提高位置响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
- 位置环参数I:该参数用于控制伺服电机在位置模式下的位置稳定度。
较高的I值可以提高稳定性,但可能会导致超调现象。
较低的I值可能会导致位置稳定度不够。
根据实际情况,逐步调整该参数,以获得最佳的位置稳定度。
位置环参数I:该参数用于控制伺服电机在位置模式下的位置稳定度。
较高的I值可以提高稳定性,但可能会导致超调现象。
较低的I值可能会导致位置稳定度不够。
根据实际情况,逐步调整该参数,以获得最佳的位置稳定度。
2. 速度模式参数调节:速度模式参数调节:- 速度环参数P:该参数用于控制伺服电机在速度模式下的速度准确性。
较高的P值可以提高速度响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
速度环参数P:该参数用于控制伺服电机在速度模式下的速度准确性。
较高的P值可以提高速度响应速度,但可能会增加振荡和震荡。
较低的P值可以提高稳定性,但可能会降低响应速度。
根据应用需求,逐步调整该参数,找到最佳的平衡点。
- 速度环参数I:该参数用于控制伺服电机在速度模式下的速度稳定度。
台达伺服调机步骤简易说明书
台达伺服调机步骤简易说明书本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
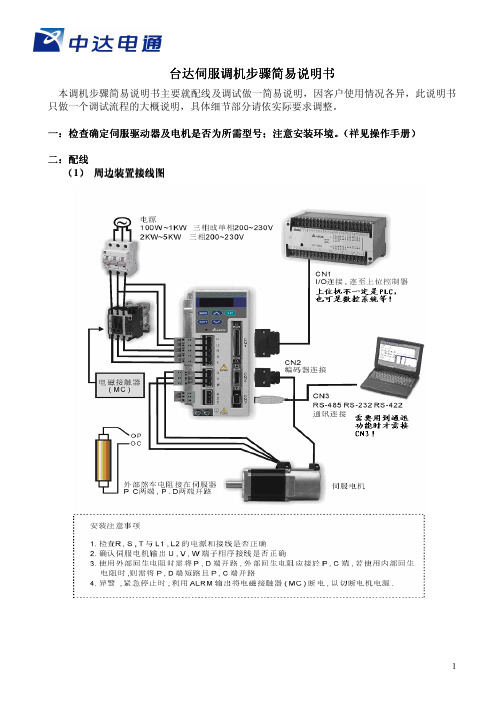
一:检查确定伺服驱动器及电机是否为所需型号检查确定伺服驱动器及电机是否为所需型号;;注意安装环境注意安装环境。
(。
(祥见操作手册祥见操作手册祥见操作手册))二:配线(1) 周边装置接线图(2) 信号与配线请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配 线是不同的,具体请参照手册3-23至3-26页说明。
但请注意, 1.无 论是什么控制模式,伺服驱动器均需DC24V 电源,您可以让驱动器自已 供给此电源(PIN17脚VDD 与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND 接伺服的PIN45,47,49 脚COM-); 2.驱动器均需SERVO ON ,如参数没有变动,PIN9脚DI1 SON 信号需导通。
您可以根据您的需要让PIN9与PIN45等常时短接或用个开 关量来控制它的ON-OFF ; 3.如果您没有用到CW ,CCW 禁止极限和外加 急停按扭,则请把PIN 32,PIN31 ,PIN30与PIN45等COM-脚短路。
(3) 编码器接线1.編碼器引出線連接頭規格:驅動器容量 電機型號 Encoder Connector定義100w ASMT-01L250X 200w ASMT-02L250X 400w ASMT-04L250X 750WASMT-07L250XHOUSING:AMP (1-1318118-6)A1KW ASMT-10L250X ASMT-10M250X 2KW ASMT-20L250X ASMT-20M250X 3KW ASMT-30L250X ASMT-30M250X 5KWASMT-50M250X20-29 17-#16MS3106B20-29SB端子定義內容 A 端子 A1 B1 A2 B2 A3 B3 A5 B5 B6 A /A B /B Z /Z 5V GND 颜色 蓝 蓝/黑 绿 绿/黑 黄 黄/黑 红 黑 BRAID SHELDB 端子 A BCD F G S RA/AB/BZ/Z5VGND線材選擇請使用附隔離網線的多芯双绞線線材選擇請使用附隔離網線的多芯双绞線,,而隔離網線要確實與SHIELD 端相連接端相連接!2.CN2接头定义:附件附件::电子齿轮比设定步骤1. 确认机械规格确认机械规格与电子齿比设定相关的要素有:齿轮比;螺杆节距;滑轮直径等。
台达伺服手册

台达伺服手册台达伺服手册一、产品概述1.1 产品介绍台达伺服系统是一种高性能的运动控制设备,它具有稳定的控制性能和精准的位置、速度和力控制能力。
1.2 产品特点- 高性能:台达伺服系统具有高达100kHz的控制带宽,能够实现高速、高精度的运动控制。
- 可编程性:通过PLC或其他控制软件,用户可以编写自定义的运动控制程序,灵活适应各种应用。
二、系统组成2.1 伺服驱动器伺服驱动器是台达伺服系统的核心组件,它通过接收控制信号来驱动伺服电机实现运动控制。
2.2 伺服电机伺服电机是伺服系统的执行器,它通过转动来控制运动装置,实现位置、速度和力的精确控制。
2.3 控制器控制器是伺服系统的大脑,它接收来自外部的控制信号,并根据设定参数调节伺服驱动器和伺服电机的运动。
三、安装与调试3.1 硬件安装- 步骤一、安装伺服驱动器到机架上。
- 步骤二、将伺服电机与驱动器连接起来。
- 步骤三、接通电源,进行电气连接。
3.2 软件配置- 步骤一、安装伺服系统配置软件。
- 步骤二、连接控制器与电脑。
- 步骤三、通过配置软件设置伺服系统参数。
3.3 调试步骤- 步骤一、伺服系统上电。
- 步骤二、进行伺服电机的回零操作。
- 步骤三、进行位置或速度控制试验。
四、应用案例4.1 控制台达伺服系统广泛应用于工业领域,通过精确的运动控制,实现的自动化操作。
4.2 电动汽车动力系统台达伺服系统也被应用于电动汽车的驱动系统中,通过精确的控制,提高了电动汽车的性能和操控性。
五、常见问题解答5.1 伺服系统无法上电怎么办?- 检查电源是否正常连接。
- 检查电源开关是否打开。
- 检查电源线是否损坏。
5.2 伺服系统无法控制伺服电机怎么办?- 检查控制信号线是否正确连接。
- 检查控制器是否设置正确的参数。
- 检查伺服驱动器是否出现故障。
六、附件本文档涉及附件详见附件部分。
七、法律名词及注释1、PLC:Programmable Logic Controller,可编程逻辑控制器,是一种数字运算器,用于对现场的机械和电气设备进行控制和管理。
伺服电机三环控制位置速度扭矩

我接触伺服电机的时间只有十来天,下面是我收集的基础的知识,希望对出学者有帮助:来源于:的论坛帖子中。
问:控制方式中的"位置","速度","转矩"有什么分别?答:位置"、"速度"、"转矩"是伺服系统由外到内的三个闭环控制方式。
位置控制方式有伺服完成所有的三个闭环的控制,计算机只需要发送脉冲串给伺服单元即可,计算机一侧不需要完成PID控制算法;使用速度控制方式时,伺服完成速度和扭矩(电流)两个闭环的控制,计算机需要发送模拟量给伺服单元,计算机一侧需要完成PID位置控制算法,然后通过D/A输出;一般来讲,我们的需要位置控制的系统,既可以使用伺服的位置控制方式,也可以使用速度控制方式,只是上位机的处理不同。
另外,有人认为位置控制方式容易受到干扰。
扭矩控制方式是伺服系统只进行扭矩的闭环控制,即电流控制,上位机的算法也简单,只需要发送给伺服单元一个目标扭矩值,是一个模拟量。
多用在单一的扭矩控制场合,比如在印刷机系统中,一个电机用速度或位置控制方式,用来确定印刷位置,另一个电机用作扭矩控制方式,用来形成恒定的张力。
、这三种工作方式实际上由三个控制回路来实现的。
位置控制方式由位置环实现,即将输出位置与指令位置比较生成控制量,使输出位置与输入位置保持一致。
速度方式时,由速度环实现,速度回路则将输出速度与指令速度比较,生成控制量,位置环断开。
使输出速度与输入速度信号保持一致。
转矩方式时,由电流环实现,速度环与位置环均断开,它的用途是使输出的电流与输入的电流保持一致。
电流环为最内环,速度环为次外环,位置环为外环。
问:什么是插补?答:所谓的插补(Interpolate),是指在轨迹起点和终点之间的数据密化。
因为用多个坐标轴来形成任何轨迹时,在微观上(插补周期)看,都是用很小的直线段去逼近曲线,那么如何生成这些直线段才能够保证最接近目标曲线并且算法简单呢?这就是所说的插补方法。
伺服电机速度环、位置环、扭矩环的控制原理
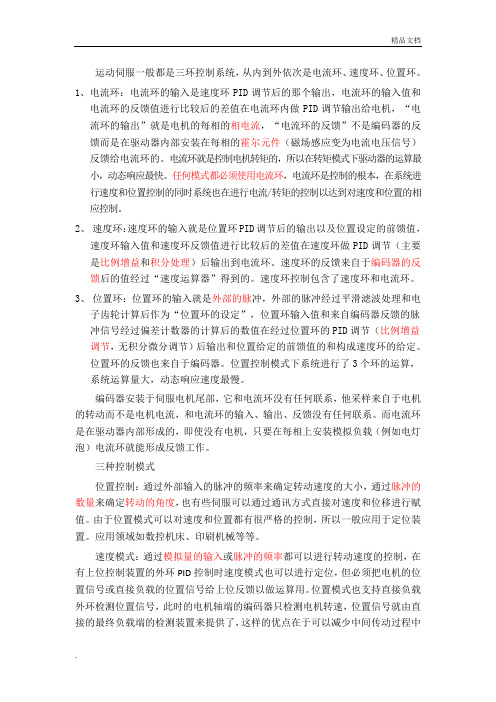
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。
1、电流环:电流环的输入是速度环PID调节后的那个输出,电流环的输入值和电流环的反馈值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。
任何模式都必须使用电流环,电流环是控制的根本,在系统进行速度和位置控制的同时系统也在进行电流/转矩的控制以达到对速度和位置的相应控制。
2、速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值,速度环输入值和速度环反馈值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出到电流环。
速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。
速度环控制包含了速度环和电流环。
3、位置环:位置环的输入就是外部的脉冲,外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,位置环输入值和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分调节)后输出和位置给定的前馈值的和构成速度环的给定。
位置环的反馈也来自于编码器。
位置控制模式下系统进行了3个环的运算,系统运算量大,动态响应速度最慢。
编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系。
而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡)电流环就能形成反馈工作。
三种控制模式位置控制:通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的数量来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
台达伺服驱动器使用指南

台達伺服驅動器使用指南台達伺服驅動器使用指南1. 簡介台達伺服驅動器是一種先進的控制設備,用於控制伺服馬達,實現高精度且可靠的運動控制。
本指南將詳細介紹台達伺服驅動器的使用方法和注意事項,以幫助您充分利用它的潛力。
2. 了解台達伺服驅動器的基本原理在使用台達伺服驅動器之前,了解它的基本工作原理非常重要。
伺服驅動器通過控制電壓和電流來實現對伺服馬達的控制。
它使用反饋機制來監測馬達轉子位置,並根據所需的運動軌跡調整控制信號。
這種精確的控制使得伺服馬達能夠實現高運動精度和快速響應。
3. 安裝和連接伺服驅動器在安裝和連接伺服驅動器之前,請確保您已閱讀並理解相關的安全手冊和操作指南。
按照指南中提供的步驟進行操作,確保正確安裝和連接驅動器。
請注意,正確的連接至關重要,因為錯誤的連接可能導致系統故障或馬達損壞。
4. 基本參數設置在使用台達伺服驅動器之前,您需要設置一些基本參數,以確保驅動器能夠正確運行。
這些參數通常包括馬達額定參數、控制方式、速度和加速度限制等。
通常,您可以通過驅動器的設置界面或相應的設置軟件進行這些設置。
5. 運動控制設定台達伺服驅動器提供了多種運動控制模式,包括位置模式、速度模式和扭矩模式。
根據您的應用需求,選擇合適的控制模式並進行相應的設置。
另外,您還可以設置運動軌跡、運動速度和加速度等參數,以實現所需的運動效果。
6. 監控和診斷台達伺服驅動器提供了豐富的監控和診斷功能,可以實時監測驅動器和馬達的狀態。
這些功能包括電流監測、溫度監測、震動監測等,可以幫助您了解系統的運行狀態並及時處理問題。
在使用伺服驅動器的過程中,定期檢查和監測這些參數是非常重要的。
7. 故障排除和維護在使用伺服驅動器時,可能會遇到一些故障和問題,如異常噪音、性能下降或系統錯誤等。
在這種情況下,您應該根據相關的故障排除指南進行操作。
另外,定期進行保養和檢修也是確保系統正常運行的關鍵。
總結:台達伺服驅動器是一種先進的控制設備,提供了高精度和可靠的運動控制功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.扭矩模式
1.说明:此扭矩模式是用于外部控制器控制输入给伺服器的电
压来实现电机扭矩大小的输出。
2.接线:将控制器控制的能输出可变电压的引脚直接连接到
CN1的18引脚,将控制器的GND与伺服器CN1的19脚连接
3.参数设定:
P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013
的预警状态。
P1-01:03,将电机设定为转矩模式
P1-02:01,速度限制,电机在没有负载的情况下会转很快
P1-07:500,设置电机加减速的时间,减少通电与断电的时
对于轴与外设的冲击
P1-09=设定电机最高转速
P2-12:00,将TCM0设定为0
P2-13:00,将TCM1设定为0
P2-12与P2-13的作用是将扭矩的命令设定为外部电压来控
制。
详情见数据手册144页设定速度,当不设定此项时,电
机只有力矩,没有转速
P1-41:200,表示输入5V模拟电压,达到100%额定转矩
P2-10:01,启动电机
当此时电机不转时,重启伺服器即可。
(建议重启)
要关闭电机则将P2-10设定为00,并保存,然后将开关关闭
并重启即可完成电机的关闭。
二.位置模式
1.说明:当前位置模式是通过外部控制器输出的PWM来控制伺
服电机的位置以及速度,其中PWM频率控制电机速度,PWM
的个数与P1-44与P1-45的结合控制电机的具体位置。
使用
的脉冲输入为开集极NPN设备输入,电源为内部24v电源。
2.接线:
上图中的白线是控制器的脉冲输出线,用于输出PWM,蓝色线是控制
板的GND的连接线,用于控制器与伺服器的共地作用。
上图是伺服器CN1的接线,其中褐色线是CN1的41引脚,
其中的PWM信号是控制器的PWM输出的引脚串接一个电阻通
过一个NPN三极管之后连接到CN1的引脚。
其中控制器的
pwm输出引脚连接NPN三极管的基极,三极管的发射极连接
CN1 的14脚(COM-),集电极连接到41引脚。
35引脚与17
引脚需要短接,CN1的COM-也就是14引脚必须要与控制器
的GND连接,否则电机将不会转动。
在位置模式下将伺服电
机的GND(19脚)与控制器的GND单独连接,电机将不会转
动。
其他的线的连接方式见数据手册67页C3-1
3.设定:
P2-15,P2-16,P2-17都设定为0,消除初始状态下AL013
的预警状态。
P1-00:02,表示脉冲+方向控制方式
P1-01:00,表位置控制模式
P1-32:00,停止方式为立即停止模式
P1-37:10,负载惯量与电机本身惯量比,在调试时自动估
算。
P1-44:电机齿轮比分子
P1-45:电机齿轮比分母
P1-45与P1-44共同确定电机多少个脉冲才能完成电机转动
一圈的过程。
计算公式是:
分辨率(160000)/1圈脉冲数=P1-44/P1-45
P2-10:01,伺服启动
建议重启!
要关闭电机则将P2-10设定为00,并保存,然后将开关关闭
并重启即可完成电机的关闭。
三.扭矩与位置混合模式
1.说明:扭矩与位置的混合模式用于同时控制扭矩和位置,但
是混合模式实际是两者的交替实现的,两者的交替是通过控
制器控制CN1 的DI7(手册63页),也就是31引脚的置高
与置低来实现的,置低是扭矩模式,置高是位置模式,混合
模式的选择见数据手册的186页,DI7的功能划分见数据手
册的219页的P2-16,P2-16对应DI7的功能划分,表见数
据手册的261页
2.接线:接线方式实际是位置与扭矩模式的结合,但是此时的
混合模式会多出一个控制两种模式交换的控制接线和com+
与VDD的短接。
多出的线路的连接可见数据手册71页NPN
晶体,共射级模式(SINK模式),内部电源模式
以下接线图均为位置与扭矩混合模式的接线图,共5张:
上图是混合模式的笔绘草图,与实际连线完全一样。
上图是控制器端的连线方式
上图是伺服器端的连线
上图是CN1的17脚(VDD),35脚(PULL-HI),11脚(COM+)短接的图片
上图是全局连线的概览图。
3、设定
初始状态下,也就是将P2-8设定为10保存并重启的前提下设定。
P2-15:122
P2-17:121
P2-16:20
上面三个设定的共同作用是消除开机状态下AL013的预警状态,而单独P2-16的作用是将CN1的31引脚设定为P-T模式转换的控制引脚,置高表示扭矩模式,置低表示位置模式(实测)。
P1-01:07,设定为位置与扭矩的混合模式
========================================================== P1-02:01,速度限制,电机在没有负载的情况下会转很快
P1-09=设定电机最高转速
P2-12:00,将TCM0设定为0
P2-13:00,将TCM1设定为0
P2-12与P2-13的作用是将扭矩的命令设定为外部电压来控制。
详情见数据手册144页设定速度,当不设定此项时,电机只有力矩,没有转速
P1-41:200,表示输入5V模拟电压,达到100%额定转矩
==========================================================上面横杠内的设定为混合模式下的扭矩模式的设定
========================================================== P1-00:02,表示脉冲+方向控制方式
P1-32:00,停止方式为立即停止模式
P1-37:10,负载惯量与电机本身惯量比,在调试时自动估算。
P1-44:电机齿轮比分子
P1-45:电机齿轮比分母
P1-45与P1-44共同确定电机多少个脉冲才能完成电机转动一圈的过程。
计算公式是:分辨率(160000)/1圈脉冲数=P1-44/P1-45
上面横杠内的内容是混合模式下的位置模式的设定。
P2-10:01,伺服启动
建议设定完成之后重启
四.速度模式:
1.说明
速度模式是根据CN1口的20引脚和19脚之间的电压差值来控制电机转速的。
当处于速度模式下,两个引脚之间没有电压的情况下与位置模式相似,电机的位置是不能改变的。
2.接线要求:
将伺服器上面的CN1的19引脚连接单片机的GND,20引脚连接单片机DAC的输出引脚,也就是输出电压可变的引脚。
速
度模式下只需要连接这两根导线即可。
3.设定
每次在更改控制模式时,都将P2-8设定为10,使电机伺服器重设,并断电重启伺服器。
1.P1-01:2,速度模式
2.P1-34:100,加速时间
3.P1-35:0-100,减速时间,单位ms
4.P1-36:100,平滑时间,单位ms,根据实际情况调整
5.P1-40:1000,在DAC输出最大的电压时,电机的最大转速,
单位r/min
6.P2-12:0,将SPD0设定为0
7.P2-13:0,将SPD1设定为0
P2-13与P2-12共同设定电机的转动模式为外部模拟电压
值
5.P2-10:1,启动伺服电机,断电重启伺服器即可。