台达伺服调机步骤简易说明书
台达伺服龙门功能操作手册
台达伺服龙门功能操作手册一、引言伺服龙门是一种以台达伺服系统为核心的机械设备,它具有高精度、高速度、高可靠性等特点,广泛应用于自动化生产线、物流仓储系统等领域。
本操作手册将介绍台达伺服龙门的功能和操作方法,旨在帮助用户更好地了解和使用该设备。
二、设备介绍1. 规格参数台达伺服龙门的规格参数如下:- 工作速度:最大速度可达XX米/秒- 工作精度:定位精度可达XX毫米- 承重能力:最大承重能力为XX千克- 工作范围:行程范围可调,最大行程为XX毫米2. 主要组成部分台达伺服龙门主要由以下组成部分构成:- 伺服控制器:负责接收指令和控制龙门的运动轨迹- 伺服电机:提供动力,驱动龙门的运动- 导轨:支撑和引导龙门的运动- 导向系统:确保龙门的运动轨迹准确无误- 操作面板:提供用户与设备进行交互的界面三、功能操作1. 伺服系统设置在开始使用伺服龙门之前,需要进行伺服系统的设置,包括参数调整和校准等。
用户可以通过操作面板上的菜单进行设置,根据实际需求进行调整并保存设置。
2. 运动控制伺服龙门的运动控制是通过伺服控制器进行的,用户可以通过操作面板上的控制按钮或者使用外部控制设备来实现对龙门的运动控制。
通过指定坐标位置和速度,龙门可以精确到达目标位置。
3. 坐标系切换伺服龙门支持多种坐标系的切换,用户可以根据不同的应用需求,选择合适的坐标系进行操作。
常用的坐标系包括直角坐标系、极坐标系、工具坐标系等。
4. 手动操作在某些情况下,用户可能需要对伺服龙门进行手动操作。
通过操作面板上的手动模式,用户可以手动操纵龙门的运动,实现对龙门的微调和调试等。
5. 报警处理当伺服龙门发生异常情况或者故障时,会触发报警信号。
用户需要及时根据报警代码和说明来判断故障原因,并采取相应的处理措施,以保证设备的正常运行。
6. 编程接口伺服龙门提供编程接口,用户可以通过编写程序来实现对龙门的自动化控制。
用户可以使用各种编程语言,通过调用相应的函数和方法来控制伺服龙门的运动。
台达A系列伺服电机调试步骤
台达A系列伺服电机调试步骤The Standardization Office was revised on the afternoon of December 13, 2020第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215CDC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如,相当于一个脉冲想走的距离;b.行走速度200mm/s,PLC最大发脉冲数2000000*(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径e.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
台达伺服如何快速调机
台达伺服如何快速调机
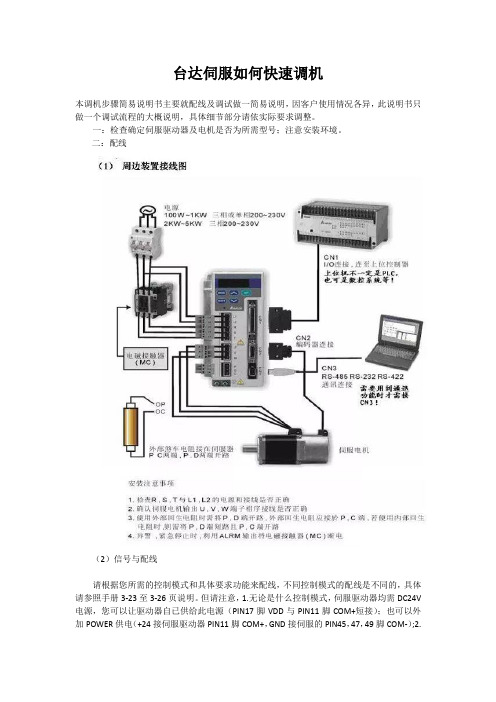
本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一:检查确定伺服驱动器及电机是否为所需型号;注意安装环境。
二:配线
(2)信号与配线
请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配线是不同的,具体请参照手册3-23至3-26页说明。
但请注意,1.无论是什么控制模式,伺服驱动器均需DC24V 电源,您可以让驱动器自已供给此电源(PIN17脚VDD与PIN11脚COM+短接);也可以外加POWER供电(+24接伺服驱动器PIN11脚COM+,GND接伺服的PIN45,47,49脚COM-);2.
驱动器均需SERVOON,如参数没有变动,PIN9脚DI1SON信号需导通。
您可以根据您的需要让PIN9与PIN45等常时短接或用个开关量来控制它的ON-OFF;3.如果您没有用到CW,CCW禁止极限和外加急停按扭,则请把PIN32,PIN31,PIN30与PIN45等COM-脚短路。
台达CANopen及A 伺服简易手册

台达产品简易操作手册(一)台达A2伺服马达接头及对应线序(二)台达A2伺服编码器对应接口视图及线序(三)台达A2伺服PR模式参数设定及对应关系表模式设定P1‐01=1DI1=101伺服使能DI2=108相应PR触发DI3=111(POS0)DI4=112(POS1)DI5=113(POS2)DI6=11A(POS3)DI7=11B(POS4)DI8=11C(POS5)一点说明:(1) 当选定一个PR需要运行时,请首先选择,然后在一点延时触发,这样保证能够运行起来,因为触发是脉冲沿有效。
(2) 当需要行走的距离很长时,PR设定的脉冲无法满足要求是,请设定电子齿轮比,相关参数为P1‐44,P1‐45,电子齿轮比是全局参数,一旦设定所有的PR都按照这个比例行走。
(四)CANopen组态介绍1.首先需要安装台达相应的组态软件CANopen Builder,图标如下图2.安装完成如下图3.开始组态步骤一,如下图一图一4.操作如下:请双击右侧窗口的相应的伺服图片,出现如下窗口。
图二4.开始组态步骤三,配置PDO ,如下图三操作如下:窗口1(如下图)的C 部分,打开时可能有默认数据,如有则没有关系可以把它删除掉,然后根据实际需要进行重新配置。
PDO 里面的Rceive PDO Comm…表示伺服接收的内容,即上位机发送给伺服。
PDO 里面的Transmit PDO Comm…表示伺服发出的内容,即上位机从伺服接收。
双击此图标图三5.开始组态步骤四,配置PDO ,如下图四‐1,图四‐2 操作如下:(1)双击窗口1里面的C 部分的一个参数,出现窗口 图四‐1,如下图四‐1在“参数群”部分选择需要的参数,这里必须需要选择P4‐07,利用“下移”按钮进行选择,也可利用“上移”按钮进行移除。
完毕之后确定即可。
(2)双击窗口1里面的C 部分的另外一个参数,同样出现窗口 图四‐2,如下图四‐2 在“参数群”部分选择需要的参数,这里根据需要可以选择P0‐01(伺服报警),利用“下移”按钮进行选择,也可利用“上移”按钮进行移除。
台达伺服手册

台达伺服手册台达伺服手册一、产品概述1.1 产品介绍台达伺服系统是一种高性能的运动控制设备,它具有稳定的控制性能和精准的位置、速度和力控制能力。
1.2 产品特点- 高性能:台达伺服系统具有高达100kHz的控制带宽,能够实现高速、高精度的运动控制。
- 可编程性:通过PLC或其他控制软件,用户可以编写自定义的运动控制程序,灵活适应各种应用。
二、系统组成2.1 伺服驱动器伺服驱动器是台达伺服系统的核心组件,它通过接收控制信号来驱动伺服电机实现运动控制。
2.2 伺服电机伺服电机是伺服系统的执行器,它通过转动来控制运动装置,实现位置、速度和力的精确控制。
2.3 控制器控制器是伺服系统的大脑,它接收来自外部的控制信号,并根据设定参数调节伺服驱动器和伺服电机的运动。
三、安装与调试3.1 硬件安装- 步骤一、安装伺服驱动器到机架上。
- 步骤二、将伺服电机与驱动器连接起来。
- 步骤三、接通电源,进行电气连接。
3.2 软件配置- 步骤一、安装伺服系统配置软件。
- 步骤二、连接控制器与电脑。
- 步骤三、通过配置软件设置伺服系统参数。
3.3 调试步骤- 步骤一、伺服系统上电。
- 步骤二、进行伺服电机的回零操作。
- 步骤三、进行位置或速度控制试验。
四、应用案例4.1 控制台达伺服系统广泛应用于工业领域,通过精确的运动控制,实现的自动化操作。
4.2 电动汽车动力系统台达伺服系统也被应用于电动汽车的驱动系统中,通过精确的控制,提高了电动汽车的性能和操控性。
五、常见问题解答5.1 伺服系统无法上电怎么办?- 检查电源是否正常连接。
- 检查电源开关是否打开。
- 检查电源线是否损坏。
5.2 伺服系统无法控制伺服电机怎么办?- 检查控制信号线是否正确连接。
- 检查控制器是否设置正确的参数。
- 检查伺服驱动器是否出现故障。
六、附件本文档涉及附件详见附件部分。
七、法律名词及注释1、PLC:Programmable Logic Controller,可编程逻辑控制器,是一种数字运算器,用于对现场的机械和电气设备进行控制和管理。
台达伺服驱动器使用指南

台達伺服驅動器使用指南台達伺服驅動器使用指南1. 簡介台達伺服驅動器是一種先進的控制設備,用於控制伺服馬達,實現高精度且可靠的運動控制。
本指南將詳細介紹台達伺服驅動器的使用方法和注意事項,以幫助您充分利用它的潛力。
2. 了解台達伺服驅動器的基本原理在使用台達伺服驅動器之前,了解它的基本工作原理非常重要。
伺服驅動器通過控制電壓和電流來實現對伺服馬達的控制。
它使用反饋機制來監測馬達轉子位置,並根據所需的運動軌跡調整控制信號。
這種精確的控制使得伺服馬達能夠實現高運動精度和快速響應。
3. 安裝和連接伺服驅動器在安裝和連接伺服驅動器之前,請確保您已閱讀並理解相關的安全手冊和操作指南。
按照指南中提供的步驟進行操作,確保正確安裝和連接驅動器。
請注意,正確的連接至關重要,因為錯誤的連接可能導致系統故障或馬達損壞。
4. 基本參數設置在使用台達伺服驅動器之前,您需要設置一些基本參數,以確保驅動器能夠正確運行。
這些參數通常包括馬達額定參數、控制方式、速度和加速度限制等。
通常,您可以通過驅動器的設置界面或相應的設置軟件進行這些設置。
5. 運動控制設定台達伺服驅動器提供了多種運動控制模式,包括位置模式、速度模式和扭矩模式。
根據您的應用需求,選擇合適的控制模式並進行相應的設置。
另外,您還可以設置運動軌跡、運動速度和加速度等參數,以實現所需的運動效果。
6. 監控和診斷台達伺服驅動器提供了豐富的監控和診斷功能,可以實時監測驅動器和馬達的狀態。
這些功能包括電流監測、溫度監測、震動監測等,可以幫助您了解系統的運行狀態並及時處理問題。
在使用伺服驅動器的過程中,定期檢查和監測這些參數是非常重要的。
7. 故障排除和維護在使用伺服驅動器時,可能會遇到一些故障和問題,如異常噪音、性能下降或系統錯誤等。
在這種情況下,您應該根據相關的故障排除指南進行操作。
另外,定期進行保養和檢修也是確保系統正常運行的關鍵。
總結:台達伺服驅動器是一種先進的控制設備,提供了高精度和可靠的運動控制功能。
台达液压伺服接线调试简述

参数 00-08=压力传感器 10V 对应压力值设定 压力回授最高值 参数 00-08 0~250Bar 设 定 内容
转速命令设为 10rpm,按【RUN】,透过压力表头确认压力值>0。
当压力值≦0 时 慢慢提高转速 确认油泵运转方向 确认各个方向阀处于关闭状态
当压力值>0 时 确认操作面板之多功能显示的电压与压力表头为一致
01-05 0.00~600.00 秒 设定内容 减速时间设定 参数
01-06 0.00~600.00 秒 设定内容
在低压、低速情况下(额定的 30%以内),控制器采「手动运转」操作各油缸的 动作。在动作中,检查油管是否有漏油、油泵是否有异音。
当空气排尽后,动作中如有压力波动等现象发生,请按照“参数说明”所述方 法,调整压力控制
注 3*
电机温升保护开关若为常闭型(normal close)时,请先将参数 03-04 设为 4 后,再予以配线,此时驱动器显示 EF1 的错误 讯息后,清除此讯息即可。
注 4* 请依照热敏电阻规格作选择 R 值,相关动作准位可由参数 02-08~02-10 作设定。若热敏电阻型号为 KTY84, 则选择 R 值为 2kΩ(1/4W)±0.1%,且参数 02-11 设定值为 1。
PI 参数。
步骤六、 改由控制器给定运转指令
参数 01-01=1 运转指令来源 参数 01-01 0:由数字操作器操作 设定内容 1:外部端子操作, 键盘 Stop 无效
2:通讯 RS-485, 键盘 Stop 无效 步骤七、 射出/保压调整
进行料管加热且达到预定温度,控制器处于手动控制。 将三段 PI 的 Ki 值设定为零(参数 00-21、00-23、00-25),三段 Kp 值设
台达VFD-VJ伺服驱动器调机步骤

工程部台达VFD-VJ伺服驱动器调机步骤第一步:驱动器通电和设置运行命令来源先不接SON与EMG信号线,检查其他接线无误后给伺服驱动器通电。
然后设置01-01=0(由面板控制启停)。
第二步:设置电机温度报警(电机内温度报警开关为常闭时)设置03-04=4,这时面板闪烁显示EF1。
再接上EMG信号线,按“停止/复位”键复位报警。
第三步:设置系统最高工作压力设00-07=系统最高工作压力(如140kg或175kg)第四步:设置伺服电机参数确认00-09=0情况下(即处于速度模式),依伺服电机铭牌数据设置以下参数:01-02 PM电机最高频率(HZ)(8极电机用最高转速除以15即为最高频率)01-03 PM电机额定频率(HZ)01-04 PM电机额定电压(V)01-17 PM电机额定电流(A)01-18 PM电机额定功率(KW)01-19 PM电机额定转速(RPM)01-20 PM电机极数01-21 PM电机转子惯量(K g·CM2)01-22~01-25 这四个参数采用设置01-07=5然后按“启动”键进行自学习。
(自学习时面板闪烁显示,闪烁完毕即学习完成。
可查看01-22~01-25中是否有参数写入确认学习是否完成,原为0)第四步:自学习电机PG原点偏移角设置01-07=4然后按“启动”键自学习。
(自学习时面板闪烁显示,闪烁完毕即学习完成。
可查看01-27中是否有参数写入确认学习是否完成,原为0)自学习中同时查看电机轴旋转方向是否正确,应为面向轴心逆时针旋转。
若旋转方向不对,任意调换U、V、W的两相即可。
第五步:用面板给定小频率让电机运行按MODE键至面板左侧显示“F”,调节右侧数字为1~10(HZ)然后按RUN键让电机慢慢旋转,观察压力表是否起压。
若久不起压,可松开某处油管接头,给油路排气。
第六步:三点压力与流量校正设置00-09=1(即处于压力模式)。
先设00-04=12(面板自定义显示PI输入),用注机电脑给最大压力、一半压力和最低压力,观察面板监控值(按MODE键至左侧显示‘U’,查看右侧数字)并分别写入00-14、00-15和00-16。
台达A系列伺服电机调试步骤

台达A系列伺服电机调试步骤调试台达A系列伺服电机的步骤如下:1.硬件准备:确认电源和接地正常,并检查电源电压是否符合伺服电机的要求。
准备所需的调试工具,如示波器、万用表等。
2.连接电源和电机:将伺服电机与适配器或驱动器连接,并将电源线和信号线正确连接。
确保连接正确,避免反极性和短路等问题。
3.电机参数设置:在伺服驱动器中,设置电机的参数,如额定电压、额定电流、脉冲分辨率等。
这些参数应根据电机的规格和要求进行设置,以确保电机能够正常运行。
4.伺服驱动器接线检查:检查伺服驱动器的接线情况,确保电源线、信号线和编码器线等连接正确。
注意查看是否有损坏的线缆或插头等。
5.伺服驱动器参数设置:根据具体的应用需求,设置伺服驱动器的参数。
包括控制模式、倍率、加减速时间、速度限制等。
这些参数的设置会直接影响伺服电机的运动特性。
6.示波器监测:使用示波器监测伺服驱动器的输出信号和电机的运动情况。
通过示波器,可以观察到电机的转矩、速度、位置等参数的变化,以判断伺服系统是否正常工作。
7.动态调试:开始进行动态调试,逐步增加伺服系统的负载并观察其响应。
通过逐步增加负载,可以观察到伺服电机的性能并进行相应的调整。
8.脉冲信号调试:调试脉冲信号的频率、脉冲宽度和脉冲类型等参数。
通过调试脉冲信号,可以改变电机的转速、运动方向和运动步长等。
9.反馈参数调试:根据实际情况调试反馈系统的参数,如位置偏差、速度偏差和合流误差等。
通过调整这些参数,可以提高伺服系统的控制精度。
10.稳定性测试:稳定性测试是调试的最后一步,测试伺服系统在不同负载和运动速度下的稳定性。
通过稳定性测试,可以确定伺服电机是否正常工作,并进行最后的调整和优化。
总结:台达A系列伺服电机调试的步骤包括硬件准备、连接电源和电机、设置电机参数、检查伺服驱动器接线、设置伺服驱动器参数、示波器监测、动态调试、脉冲信号调试、反馈参数调试和稳定性测试。
这些步骤的目的是确保伺服系统能够正常工作并满足实际应用需求。
台达A2系列伺服电机调试步骤

台达A2系列伺服电机调试步骤调试步骤如下:1.首先,了解A2系列伺服电机的参数和特性。
了解电机的额定转矩、额定转速、电机编号等参数。
同时,了解伺服电机的工作原理和控制方式,以便在调试过程中能够理解和解决问题。
2.确定伺服电机的机械连接。
将电机和负载连接在一起,例如通过联轴器。
确保机械连接牢固可靠,以保证传递电机的转动力矩和转速给负载。
3.进行电气连接。
将伺服电机的输入端(通常是三相交流电源)和输出端(通常是编码器和控制器)与其他电气设备连接好。
检查电气连接是否正确,例如插头是否插紧,线路是否接触良好等。
4.设置参数。
根据实际情况,对伺服电机的控制器进行参数设置。
这些参数包括速度环、位置环、加速度环等。
根据机械系统的特性,调整这些参数以使电机能够稳定工作,并实现所需的性能。
5.进行功率调试。
通过控制器提供的接口,调整电机的工作功率。
测试电机在不同负载和转速下的输出性能,并记录相应的数据。
根据测试结果,调整功率参数或机械系统,以优化电机的功率输出。
6.进行控制调试。
通过控制器的接口设定所需的控制模式,例如位置控制、速度控制或力矩控制等。
测试电机在不同控制模式下的响应性能,并记录相应的数据。
根据测试结果,调整控制参数或机械系统,以实现更好的控制性能。
7.进行保护调试。
根据实际需要,为电机设置保护功能,例如过流保护、过热保护、过载保护等。
通过模拟和测试不同的故障和异常情况,检验保护功能的可靠性和响应性,并记录相应的数据。
根据测试结果,调整保护参数或机械系统,以提高电机的安全性和可靠性。
8.进行稳定性调试。
通过控制器的接口设定所需的稳定性要求,例如阻尼、迟滞等。
测试电机在不同负载、转速或控制模式下的稳定性,并记录相应的数据。
根据测试结果,调整稳定性参数或机械系统,以使电机能够稳定工作在所需的工况下。
9.进行性能验证。
将伺服电机安装在实际工作环境中,并进行性能验证。
测试电机在实际工况下的工作性能、响应性能和稳定性,并记录相应的数据。
台达伺服说明书

序言
感謝您使用本產品,本使用操作手冊提供 ASD-A 系列伺服驅動器及 ASMT 系列伺服電機的相關 資訊。內容包括:
伺服驅動器和伺服電機的安裝與檢查 伺服驅動器的組成說明 試轉操作的步驟 伺服驅動器的控制功能介紹及調整方法 所有參數說明 通訊協定說明 檢測與保養 異常排除 應用例解說 本使用操作手冊適合下列使用者參考 伺服系統設計者 安裝或配線人員 試轉調機人員 維護或檢查人員 在使用之前,請您仔細詳讀本手冊以確保使用上的正確。此外,請將它妥善放置在安全的地點 以便隨時查閱。下列在您尚未讀完本手冊時,務必遵守事項: 安裝的環境必須沒有水氣,腐蝕性氣體及可燃性氣體 接線時禁止將三相電源接至電機 U、V、W 的接頭,一旦接錯時將損壞伺服電機 接地工程必須確實實施 在通電時,請勿拆解驅動器、電機或更改配線 在通電運作前,請確定緊急停機裝置是否隨時啟動 在通電運作時,請勿接觸散熱片,以免燙傷 如果您在使用上仍有問題,請洽詢經銷商或者本公司客服中心
! 注意
請不要將動力線和信號線從同一管道內穿過,也不要將其綁扎在一起。運行 配線時,請使動力線和信號線相隔 30cm 以上。 對於信號線、編碼器(PG)反饋線,請使用多股絞合線以及多芯絞合整體屏 蔽線。對於配線長度,指令輸入線最長為 3m,PG 反饋線最長為 20m。
台达伺服电机说明书

台达伺服电机说明书台达伺服电机说明书一、产品概述台达伺服电机是一种高精度、高可靠性的电动机,具有快速响应、精准控制等特点。
它广泛应用于数控机床、自动化生产线、印刷设备等领域。
二、产品参数1. 额定功率:0.1 kW - 55 kW2. 额定转速:1500 rpm - 6000 rpm3. 额定扭矩:0.3 Nm - 200 Nm4. 控制方式:位置控制、速度控制、扭矩控制5. 通讯接口:RS485、CANopen、EtherCAT等三、产品特点1. 高精度:采用数字式控制技术,能够实现高精度的位置控制和速度控制。
2. 快速响应:响应时间小于1ms,能够快速适应不同的工作负载。
3. 多种保护功能:具有过载保护、过热保护等多种保护功能,确保电机安全运行。
4. 多种通讯接口:支持RS485、CANopen、EtherCAT等多种通讯接口,方便与其他设备进行联网。
5. 可编程性强:具有丰富的编程功能,支持多种编程语言,方便用户进行二次开发。
四、产品安装1. 安装前准备在安装前,需要对电机进行检查,确保电机无损坏、无异响等异常情况。
同时还需检查电源线路是否正确接好。
2. 安装步骤(1)确定安装位置:根据实际需要确定电机的安装位置,确保电机能够正常运转,并且方便维护。
(2)固定电机:将电机固定在安装位置上,并且确保固定牢固。
(3)连接电源线路:根据实际需要连接电源线路,并且确保接线正确。
(4)连接控制器:将伺服控制器与伺服电机进行连接,并且按照说明书进行设置和调试。
五、产品调试在安装完成后,需要对伺服系统进行调试。
具体步骤如下:1. 伺服参数设置根据实际需要设置伺服参数,包括速度、加速度、减速度等参数。
同时还需设置伺服模式和通讯接口等相关参数。
2. 运动控制测试在设置完成后,进行运动控制测试。
通过测试可以了解到伺服系统的性能表现和响应速度等情况。
3. 优化调试根据测试结果,对伺服系统进行优化调试,以达到最佳的运动控制效果。
台达伺服说明书
機械與伺服電機的組合試運行
! 注意
為了避免意想不到的事故,需進行伺服電機的無負載試運行,分開連軸器及皮帶 等,使伺服電機處於單獨的狀態,在伺服電機和機械連接後運轉,如果發生操作 錯誤,則不僅僅會造成機械的損壞,有時還可能導致人身傷害。
序言-3
目錄
第一章 產品檢查與型號說明
1-1 產品檢查….……………………………………………………………………….…… 1-1 1-2 產品型號對照……………………………………………………………………….…… 1-2
第三章 配線
3-1 週邊裝置與主電源迴路連接 ………………………………………………………….3-1 3-1-1 週邊裝置接線圖 ………………………………………………………………….3-1 3-1-2 驅動器的連接器與端子 ………………………………………………………….3-2 3-1-3 三相電源接線法 ………………………………………………………………….3-3 3-1-4 單相電源接線法 ………………………………………………………………….3-4 3-1-5 電機 U、V、W 引出線的連接頭規格 …………………………………………….3-5 3-1-6 編碼器引出線連接頭規格 ………………………………………….…………...3-6 3-1-7 線材選擇 ……….……………………………………………………………….3-7
1-2-1 伺服驅動器 ASD-A 系列 ……………………………………………………….. 1-2 1-2-2 電機系列 …………………………………………………………………………1-3 1-3 伺服驅動器與電機機種名稱對應參照表 ………………………………………………1-4 1-4 伺服驅動器各部名稱 ……………………………………………………………………1-5 1-5 伺服驅動器操作模式簡介 ………………………………………………………………1-6
台达伺服set按键说明
台达伺服set按键说明
台达伺服SET按键是台达伺服驱动器上的一个重要功能键,用于设置伺服驱动器的各项参数。
下面是对台达伺服SET按键的详细说明:
1.SET按键的位置:SET按键通常位于台达伺服驱动器的正面面板上,一般为一个带有SET字样的按钮。
2.SET按键的作用:SET按键用于进入伺服驱动器的参数设置模式,用户可以通过该按键来修改伺服驱动器的运行参数,以满足不同的应用需求。
3.SET按键的操作方法:在正常运行状态下,按下SET按键并保持2秒钟,伺服驱动器将进入参数设置模式。
在参数设置模式下,用户可以通过上下方向键选择要修改的参数,然后通过左右方向键进行数值的增减调整。
最后,按下SET按键确认修改并保存参数值。
4.SET按键的应用场景:SET按键的应用场景非常广泛,可以用于调整伺服驱动器的运行速度、加减速时间、位置偏移等参数。
通过合理的参数设置,可以使伺服驱动器更好地适应不同的工作环境和工作要求,提高系统的性能和稳定性。
5.SET按键的注意事项:在使用SET按键进行参数设置时,需要注意以下几点:首先,操作前最好先备份原始参数,以防止设置错误导致系统故障;其次,根据实际需求进行参数设置,避免过度调整或不合理调整;最后,设置完成后,及时保存参数,并进行相关测试和验证,确保参数修改的正确性和有效性。
总结:台达伺服SET按键是一个用于参数设置的重要功能键,通过SET按键可以方便地修改伺服驱动器的各项参数。
合理的参数设置可以提高系统性能和稳定性,但在设置过程中需要注意操作方法和注意事项,以确保参数设置的正确性和有效性。
台达伺服说明书

台达伺服说明书台达伺服说明书篇一:各伺服接线说明东源伺服 TSTK 50P主伺服引脚定义摇伺服引脚定义摇床伺服端引脚定义控制端伺服参数主伺服摇伺服东能伺服EPS36P摇床伺服端引脚定义控制端埃斯顿伺服ED主伺服引脚定义36P 摇伺服引脚定义20P主伺服端引脚定义控制端摇床伺服端引脚定义控制端英迈克伺服摇床伺服端引脚定义控制端台达伺服摇床伺服端引脚定义控制端台达伺服说明书篇二:台达伺服电机作往复运动方案说明台达伺服电机作1800mm往复运动我用的台达伺服电机作1800mm往复运动。
电机配1:30的减速器带动同步带轮(带轮直径是130mm),如何计算所发脉冲个数,伺服电机的额定转速是3000r/m,那所发最大脉冲频率是多少呢, 如何计算呢。
有公式吗带轮直径是130mm那伺服电机带减速机输出端转一圈就是3.14*130=376.8mm,您需要在1800的行程内做往返运动,1800/376.8=4.777圈。
这里没有说明需要一趟1800mm的时间,假设您需要10s来完成一个1800mm,那么减速机10S完成4.777圈。
减速机输出转速=4.777/10*60=28.66r/min,这个转速在3000/30=100R/min以内,所以是可行的。
伺服电机转速就是28.66*30=859.8r/min。
您问的是脉冲频率,那就是用伺服电机的位置控制模式。
台达伺服应该是也10000ppr的分辨率,也就是走一圈要10000个脉冲。
根据驱动器里的电子齿轮比设置,假设分子分母都是1,那么控制器需要发10000个脉冲电机走一圈。
10000*859.8/60=143300HZ,也就是14K左右的频率。
如果电子齿轮比设置为2,那就需要7K左右的频率。
台达伺服说明书篇三:【伺服系统】自学手册一、伺服系统概述1、行业包装是潜力最大的行业市场,印刷行业也是潜力较大行业。
同时,伺服产品在玻璃加工、汽车、医疗设备、通信、安防、仪器和试验装置上也大量使用。
台达伺服调机步骤简易说明书

台达伺服调机步骤简易说明书■f 中达电iB台达伺服调机步骤简易说明书本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书 只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一:检查确定伺服驱动器及电机是否为所需型号;注意安装环境。
(祥见操作手册):配线(1)周边装置接线图T”橙冼R , S r T L1 JL2的电源和接线昱否正佛2一确认恫服电机输出U , V , wffl 子相序按线是否正昵m 便用扑部冋生也si 吋需将p ’Dss 开踣,外部冋生屯阻庙:接於■巴c 瑞.掉便用内部冋q :. 电阻时剧需将P. D 端fei^HP.C 端幵幽4.界警■紧急停止时’利用ALRM^tU 将屯磴按触話(IWC )断电・U (切断屯机电Jfi.CN3QN1g 连接,湮至上位控" 上住机不一妊是PLC.也可是数挫系辯.等!100W-1KW120 O'230V2KW-S KW S z HH200'230V周服屯机电磁接触擀(MC )CN2編屈器连按通削字接盂要用到蚂迅 功龜吋才希按CN3 !蚩辈注点爭项驅動器容量電機型號100w ASMT-01L250X 200w ASMT-02L250X 400w ASMT-04L250X 750W ASMT-07L250X1KW ASMT-10L250XASMT-10M250X En coder Conn ectorHOUSING:AMP(1-1318118-6)20-29E中迖电直(2)信号与配线请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配线是不同的,具体请参照手册3-23至3-26页说明。
但请注意,1■无论是什么控制模式,伺服驱动器均需DC24V电源,您可以让驱动器自已供给此电源(PIN17脚VDD与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND接伺服的PIN45,47,49 脚COM-); 2■驱动器均需SERVO ON,如参数没有变动,PIN9脚DI1 SON 信号需导通。
台达伺服参数设定(图文运用)
台达伺服参数设定1. 基本参数(伺服能够运行的前提)P1-00 设为2 表示脉冲+方向控制方式P1-01 设为00 表示位置控制模式P1-32 设为0 表示停止方式为立即停止P1-37 初始值10,表示负载惯量与电机本身惯量比,在调试时自动估算。
P1-44 电子齿轮比分子P1-45 电子齿轮比分母2.扩展参数(伺服运行平稳必须的参数,可自动整定,也可手动设置)P2-00 位置控制比例增益(提升位置应答性,缩小位置控制误差,太大容易产生噪音)。
P2-04 速度控制增益(提升速度应答性,太大容易产生噪音)。
P2-06 速度积分补偿(提升速度应答性,缩小速度控制误差,太大容易产生噪音)。
此外还需要把P2-15至P2-17 均设为0,分别代表正反转极限,紧急停止关闭。
否则的话会导致伺服驱动器报警。
此外如果有刹车的话还要把P2-18设为108 (设定第一路数字量输出为电磁抱闸信号。
)这些参数都是基于对伺服驱动器的数字输入(DI)输出(DO)功能定义表来设置。
(表7-1.表7-2)对于工程应用当中的I/O点进行端口定义。
必要的时候查表进行相应的设置。
3.共振抑制的设置P2-23 第一组机械共振频率设定值,(开启第一组机械共振频率时,P2-24不能为零)P2-25 共振抑制低通滤波。
P2-26 外部干扰抵抗增益。
P2-47 自动共振抑制设为1 抑振后自动固定。
P2-49 速度检测滤波及微振抑制。
设置完以上的参数就开始自动增益P2-32 设为1或2,伺服在运行过程中每半个小时估测负载惯量比至P1-37.再结合P2-31 的刚性及频宽设定,自动修改P2-00,P2-04,P2-06,P2-25,P2-26,P2-49等参数。
当P2-33为1时,P1-37惯量比估算完成,以上相应的控制参数值固定。
此外我们还可以把P2-32设为0,进行手动增益调整。
扩展资料:。
台达A2系列伺服电机调试步骤
第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC 来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200 系列PLC一台(我们准备的S7-1200 CPU1215CD C/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE 一台5、博途V15 设计软件6、威纶通EBproV6.0 设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1 )、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17 三个参数设定为0画面二:将参数P2-10~P2-17 参数中没有一个设定为21画面三:将参数P2-10~P2-17 参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4 )、JOG模式调试正常后,在通过PLC 控制伺服电机运转,需设定以下几个参数用来。
① 、P1-01 设定成Pt 模式00000② 、P1-00 设定成脉冲列+符号00002③ 、P0-02 设置驱动器显示状态监视输入脉冲01④ 、设定电子齿轮比P1-44(分子)和P1-45 (分母)电子齿轮比需计算,计算方式如下:前提所需条件:a. 产品所要达到的精度要求比如0.001mm,相当于一个脉冲想走的距离0.001mm;b. 行走速度200mm/s,PLC最大发脉冲数2000000*0.001 (目前伺服电机最快20m/min)c. 电机编码器分辨率1280000P/Rd. 齿轮分度圆直径63.66mme. 减速机速比10f. m/n 电机轴与负载轴的机械减速比⑤ 、将P1-44 设为8400,P1-45 设为3183⑥ 、重新启动伺服驱动器,即可。
台达伺服驱动器绝对型

DO1伺服准备好SRDY端口规划
101
P2-21
DO4定位完成
105
无锡耐特机电--电气工程部
2016年08月
DCS50SF高速秤初始化设置说明
台达伺服驱动器(A2系列)面板调试说明
本文档仅说明DCS50SF高速秤中台达伺服驱动器在初始化设置参数的相关操作,伺服驱动器操作模式及运动轨迹等设置需参照《台达伺服驱动器(A2系列)参数设置》。
参数P2-69=1:绝对型操作(只适用于绝对型电机,若使用增量型电机,回跳出AL069)。
DI2启动CTRG端口规划
108
P2-12
DI3位置0 POS0端口规划
111
P2-13
DI4位置1 POS1端口规划
112
P2-14
DI5复位ARST端口规划
102
P2-15
DI6位置2 POS1端口规划
1
11A
P2-17
DI8位置4 POS1端口规划
11B
参数设定的流程如下
1.接通电源给驱动器供电。
2.修改参数时,要断开伺服电机保护器。
3.需修改的参数及其设定值如下:(其他参数不可随意修改)
参数
功能说明
设定值
备注
P1-01
操作模式
01
P1-52
回生电阻(电阻值)
50
P1-53
回生电阻(电阻容量)
500
P2-10
DI1使能/停止SON端口规划
101
P2-11
台达B2系列伺服简易调试流程

.
'. 台达B2系列伺服建议调试流程
一、电缆连接
1,37、39、41、43,分别的定义是:方向+、方向-、脉冲+、脉冲-。
2,如需做共阳处理。
请39、43并一起接5V+,然后37接方向、43接脉冲。
二、参数调整
1,伺服使能。
伺服使能后,电机被锁死,伺服进入待工作状态。
可以将P2-10参数设置为001,即为伺服上电自动使能;也可以将此参数更改为101,即为伺服上电后,需外部输入信号使能,即9号脚接入24GND,伺服使能。
2,参数重置开关
参数恢复出厂值开关,需在伺服使能无效时使用。
参数为P2-08,更改为10,伺服自动参数重置,无需重启。
3,参数设置
快速设置
P2-15设置为0.
P2-16设置为0.
P2-17设置为0.
电子齿轮比:
P1-44与P1-45比值为64:2为5000个脉冲电机转一圈;
P1-44与P1-45比值为32:2为10000个脉冲电机转一圈;(A2系列为128:1为10000个脉冲一圈)
基本设置:
P1-00,脉冲形式选择,位选择为2,即为脉冲+方向,即XXX2。
P1-00,信号逻辑选择,第三位选择0或1,即为方向反向,即X0XX,或X1XX。
此时电机即可正常运转!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达伺服调机步骤简易说明书
本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一:检查确定伺服驱动器及电机是否为所需型号;注意安装环境。
(祥见操作手册)
二:配线
(1)周边装置接线图
(2)信号与配线
请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配线是不同的,具体请参照手册3-23至3-26页说明。
但请注意, 1.无
论是什么控制模式,伺服驱动器均需DC24V电源,您可以让驱动器自已
供给此电源(PIN17脚VDD与PIN11脚COM+短接);也可以外加POWER
供电(+24接伺服驱动器PIN11脚COM+,GND接伺服的PIN45,47,49
脚COM-); 2.驱动器均需SERVO ON,如参数没有变动,PIN9脚DI1 SON
信号需导通。
您可以根据您的需要让PIN9与PIN45等常时短接或用个开
关量来控制它的ON-OFF; 3.如果您没有用到CW,CCW禁止极限和外加
急停按扭,则请把PIN 32,PIN31 ,PIN30与PIN45等COM-脚短路。
(3)编码器接线
1.編碼器引出線連接頭規格:
驅動器容量電機型號Encoder Connector 定義100w ASMT-01L250X
HOUSING:AMP (1-1318118-6) A
200w ASMT-02L250X 400w ASMT-04L250X 750W ASMT-07L250X
1KW ASMT-10L250X
20-29
17-#16 MS3106B20-29S B
ASMT-10M250X
2KW ASMT-20L250X
ASMT-20M250X
3KW ASMT-30L250X
ASMT-30M250X
5KW ASMT-50M250X
端子定義內容
A 端子A1 B1 A2 B2 A3 B3 A5 B5 B6
A /A
B /B Z /Z 5V GND BRAID
SHELD 颜色蓝蓝/黑绿绿/黑黄黄/黑红黑
B 端子 A B
C
D F G S R
A /A
B /B Z /Z 5V GND
線材選擇請使用附隔離網線的多芯双绞線,而隔離網線要確實與SHIELD端相連接!
2.CN2接头定义:
11
2112CN2連接器(公)背面接線端10982019
各信號的意義說明如下:
Pin No
信號名稱 端子記號
機能、說明
2 /Z 相輸入 /Z 編碼器 /Z 相輸出 4 /A 相輸入 /A 編碼器 /A 相輸出 5 A 相輸入 A 編碼器A 相輸出 7 B 相輸入 B 編碼器B 相輸出 9 /B 相輸入 /B 編碼器 /B 相輸出 10 Z 相輸入 Z 編碼器 Z 相輸出 13,15 編碼器電源 GND 接地
14,16
編碼器電源
+5V
編碼器用5V 電源
接线时是CN2接脚A ,/A 等和编码器引出线接脚A ,/A 等一一对应哟。
三:参数调整 A . 参数1-01:此参数为控制模式及控制指令输入源设定。
请根据您所用的控制模式来
设定。
如为位置模式,且指令由端子输入,则请设为00;如为速度模式,则请 设为02。
具体设定请见下表:
00X/mode Pt Pr S T Sz Tz
01020304050607080910
B . 参数1-00: 当您选用位置控制模式且由端子输入指令时(当参数1-01设为00时),此参数才需设
定,其功能为外部脉冲输入型式设定。
Z Y X X 值設定:脈沖型式
其中X=0:AB 相脈沖列(4x ); X=1:正轉脈沖列及逆轉脈沖列(CW CCW 型式)
X=2:脈沖列+符號。
其中Z值设定:邏輯型式,设为0为正,1为负,当需要指今方向
取反时设定此值。
C.参数1-40:模拟速度指令最大回转速度。
当您是用速度控制模式时,需设定此参数。
当设为2000时,表示当模拟速度指令输入最大电压(10V)时,马达回转速度为
2000rpm,则此时如输入5V电压,马达转速为1000.
D. 参数1-44; 1-45. 电子齿轮比分子分母设定. 当您选用位置控制模式时,才需设定此参数
具体设定需根据您的机构来设定. 设定步骤请参考附件“电子齿轮比设定”
在配好线,设好以上参数时,马达已能正常动作,以下参数是让马达跑得更好!
E. 参数2-32:增益调整方式. 0:手动模式; 1:简易模式; 2:自动模式(持续调整);
3:自动模式(负载惯量比固定,频宽可调整). 建义选择1:简易模式.
F. 参数2-31: 自动及简易模式设定.
Y X Y: 自动调整模式应答性设定,值越大应答性越快. X:简易模式时刚度设定.依设备所需
控制刚度调整此值.值越大控制刚度越大. 参数2-32设为1时,此参数请在40~4F间调整.
出厂值为44. 40~4F值间会有一值能让马达配上您的机构跑得很欢的.
此时,万一马达跑得还不合您的心意,则请从抑制共振频率, 滤波,手动增益调整等等方面调试.当然,这只是简易步骤说明,您的有些要求可能在此没有说明,如您要选用刹车电阻,又或您是用PR模式等等, 此时请在祥读伺服手册并理解的前提下调整. 也欢迎来电共同讨论.
注意:1.许多参数设定时需要在Servo OFF时才能设定,有些参数需重开机才有效,有些参数是断电不记忆。
请细看手册,参数代号后加注之特殊符号!
(▲) Servo On時無法設定
(●) 必須重開機參數才有效
(■) 斷電不記憶
2.许多扩展及诊断参数需在参数P2-08设定后才能修改写入!需要设定时请细看此参数。
附件:
电子齿轮比设定步骤
1. 确认机械规格
与电子齿比设定相关的要素有:
齿轮比;螺杆节距;滑轮直径等。
2.确定台达伺服电机编码器最大分辨率!
目前台达伺服电机编码器每转输出脉冲数均为2500(因是AB相信号,信号可以四倍频),最大分辨率为2500*4=10000(如果是17BIT的编码器,最大分辨率则为32768*4=131072)
3.决定指令单位!
指令单位是指移动负载的位置数据的最小单位。
(通俗点说,指令单位是你来决定的,只是在决定时,你需要充分考虑上级装置指令的最小单位,机构情况,要求达到的定位精度,好不好计算等!例如:上位装置的最小单位为1um时,你可以设定指令单位为1um,它的意思是说1个脉冲控制1um,如果你设指令单位为10um,则意思为1个脉冲控制10um,很明显,1个脉冲控制1um比控制10um从控制上讲精度当然会高,当然如果精度够的话,你也可以把指令单位设为3,4等数值,但你觉得好计算吗?)
4. 用指令单位,求出负载轴旋转1圈的负载移动量.
负载轴旋转1圈的移动量=使负载轴转1圈后所移动的量/指令单位
例: 螺杆节距为10mm,指令单位为1um时, 10/0.001=10000(指令单位
5. 求出电子齿轮比(N/M)
(如有齿轮比,电机旋转B圈时,负载轴旋转A圈的情况下则)
算好后,需确认是否满足条件
当超出此范围时,伺服将不能正常动作.此时需变更机械结构或者指令单位
计算实例
1. 螺杆
2. 圆台
3. 皮带+滑轮。