第07章中断及高速处理指令
PLC_高速处理指令

为最高频率(Hz),设置范围10~20000Hz,以10的倍数为单位,最高频率中指定值的1/10可作为减 速的一次变速量(频率)。如果此指令用于步进马达的控制,此频率应设定在其不失调的范围内。 (S2.)为总输出的脉冲数,对16位,脉冲数设定为110~32767;对32位,脉冲设定为110~ 2147483647。设定不满110值时,脉冲不能正常输出。(S3.)为加减速度时间(ms),可设在 5000ms以下,加减数的变速次数(段数)为10次。(D.)为脉冲输出,只能指定Y0和Y1,必须为晶 体管输出。
图5-90的意义为执行PLSR指令以最高500Hz的频率、总输出脉冲数为D0、以 3600ms的加减速度时间输出脉冲到Y0。
(2) PLSY及PLSR的输出Y0或Y1的脉冲总数存入以下特殊数据寄存器: Y0输出存放在D8140(下位)和D8141(上位),Y1输出存放在D8142(下位)和D8143(上位)。
(2) 源(S1.)的数值必须小于等于源(S2.)的数值。 (3) 执行图5-87程序,从X0端输入计数脉冲。当计数脉冲输入后,进行区间比较: K1000>C240当前值, Y0为ON K1000≤C240当前值≤K2000, Y1为ON K2000<C240当前值, Y2为ON (4) HSZ与ZCP(FNC11)不同之处是HSZ指令仅当计数脉冲输入时才进行比较结果的 输出,一直进行到比较操作结束为止。而ZCP指令是在ZCP控制触点动作以后,立即进 行比较输出。 (5)对于具有外部复位端子的高速计数器,例如C241等,在M8025为ON的状态下,
数字化医疗仪器第07章 单片数字信号处理机应用

辅助寄存 器算术单 ARAU: 元ARAU: 产生访问 存储器所 需的地址。 需的地址。
4条内部总线:CPU1/CPU2和 条内部总线:CPU1/CPU2和 REG1/REG2。 REG1/REG2。 硬件乘法器: 硬件乘法器:单指令周期中完成 两个32bit浮点数乘法 32bit浮点数乘法, 两个32bit浮点数乘法,乘积为 40bit 或完成两个24bit定点数 bit, 24bit 40bit,或完成两个24bit定点数 乘法,乘积为32bit。 32bit 乘法,乘积为32bit。 桶形移位器: 桶形移位器:对 32bit bit数在一个周 32bit数在一个周 期内实现一次左 移或右移。 移或右移。
TMS320C30结构的功能方框图 TMS320C30结构的功能方框图
7.2.2 TMS320C30的CPU结构 7.2.2 TMS320C30的CPU结构
CPU 由 以 下 单 元 组 成 : 硬件乘法器、 硬件乘法器、 算术逻辑单元、 算术逻辑单元、 桶形移位器、 桶形移位器、 内部总线、 内部总线、 辅助寄存器算术单元、 辅助寄存器算术单元 、 CPU寄存器组 寄存器组。 CPU寄存器组。
浮点和定点处理器的动态范围比较
数据类型
产品名称 RAM TMS320C10 TMS320C15 TMS320C17 TMS320C25 TMS320C25 —50 TMS320C28 TMS320C50 TMS320C51 TMS320C53 TMS320C30 TMS320C30 一50 TMS320C31 TMS320C40 144 256 256 544 544 544 10K 2K 4K 2K 2K
7.2.3 TMS320C30的存储器结构 7.2.3 TMS320C30的存储器结构
第7章 欧姆龙CPM1A系列PLC高速计数器控制指令
比较表分8 个区域 每个区占5 个通道
表中数据可 预先写入
当实际使用的区域不满8个时,要把其余存放上、下 限值的通道都置为0,将存放子程序号的通道都置为 FFFF。
区域比较中断的执行过程
若高速计数器的当前值落在比较表中某个区域时 (下限值 ≤计数器PV值≤上限值) ,则停止执行主 程序而转去执行与该区域对应的中断子程序。子程 序执行完毕,返回到断点处继续执行主程序。 执行区域比较中断时,比较结果存放在AR1100~ AR1107中。 例如,当计数器的当前值落在比较表的区域1中时, AR1100置为ON,当计数器的当前值落在比较表的 区域2中时,AR1101置为ON等。
高速计数器的设定
通道号 位号 00 ~ 03 DM6642 04 ~ 07 08 ~ 15 各位数字的含义 计数模式 ( 4:递增计数 0:增减计数) 复位方式设定
( 0:Z信号 + 软件复位; 1:软件复位)
高速计数器使用/不使用
( 00:不使用;01:使用)
例如:DM6642的内容为 # 0114
A相
1 2 3 4 5 6 7 8 7 6 5 4 3 2 1 0
递增计数脉冲
递减计数脉冲
有的旋转编码器可提供三相脉冲,即A、B、Z相。
二、高速计数器的计数功能
高速计数器的计数模式 高速计数器的复位方式 使用高速计数器时的设定 高速计数器的溢出 计数器当前值的存储区
1. 高速计数器的计数模式
(1) 递增计数模式
目标值比较中断模式 区 域比较中断模式
1.高速计数器的目标值比较中断
采取目标值比较中断时,要建立一个目标值比较表
目标值 比较表 表中数据可 预先写入
TB TB+1 TB+2 TB+3 TB+4 TB+5 TB+6 …… 目标值的个数 目标值1低4位 目标值1高4位 目标1 中断处理子程序号 目标值2低4位 目标值2高4位 目标2 中断处理子程序号 ……
第七章中断与高速计数指令
HSC0~SC5 HSC0~HSC5
第七章 中断及高速计数指令的应用
二、高速计数器的中断事件类型 高速计数器的计数和动作可采用中断方式进行控 制。各种型号的CPU采用高速计数器的中断事件大 致分为三种方式:当前值等于预设值中断、输入方 向改变中断和外部复位中断。所有高速计数器都支 持当前值等于预设值中断,但并不是所有的高速计 数器都支持三种方式。 三、操作模式和输入线的连接 1、操作模式 高速计数器最多有12种操作模式。使用高速计数 器时,首先要定义高速计数器的操作模式,可用 HDEF指令来进行设置。不同的高速计数器有不同 的模式。
第七章 中断及高速计数指令的应用
一、高速计数器数量与地址 HC(或HSC)表示该编程元件是高速计数器,n 为地址编号。每个高速计数器包含有两方面的信 息:计数器位和计数器当前值。
主机 CPU221 可用HSC数量 4 HSC地址 HSC0 HSC3 HSC4 HSC5 CPU222 4 HSC0 HSC3 HSC4 HSC5 CPU224 6 CPU226 6
第七章 中断及高速计数指令的应用
高速 计数 器初 始化 程序
第七章 中断及高速计数指令的应用
第四节 高速脉冲输出
高速脉冲输出功能是指在PLC的某些输出端产生高 速脉冲,用来驱动负载,实现高速输出和精确控制。 一、高速脉冲输出的形式和输出端子的连接 1、高速脉冲的输出形式 高速脉冲输出有高速脉冲串输出PTO和宽度可调脉 冲输出PWM两种形式。 (1)PT0主要是用来输出指定数量的方波(占空比 50%),用户可以控制方波的周期和脉冲数。 (2)PWM主要是用来输出占空比可调的高速脉冲 串,用户可以控制脉冲的周期和脉冲宽度。
第七章 中断及高速计数指令的应用
3、将HSC1定义为工作模式11,增计数、可更新 计数方向、可更新设置值、不更新当前值允许HSC 运行,设定值(SMD52)=500,当前值(CV)等于设定 值(PV),响应中断事件。填写出相关的特殊功能寄 存器SM的数值。 4、某电动机装有转速检测装置(每转输出10个脉 冲),电动机转速由PWM指令输出控制。试编写能 实现以下控制要求的程序。检测电动机转速,并在7 段显示器上显示。当实测值与设定值不同时,改变 PWM输出,使实测值与给定值相等。
微机接口课后练习答案
第1章80x86微处理器体系结构1. 微处理器、微型计算机和微型计算机系统三者之间有什么不同?2. CPU在内部结构上由哪几部分组成?各部分具备哪些主要功能?8086/8088CPU在内部结构上设计为两个独立的功能部件:执行部件EU和总线接口部件BIU。
EU负责全部指令的执行,向BIU提供数据和所需访问的内存或I/O端口的地址,并对通用寄存器、标志寄存器和指令操作数进行管理。
BIU是CPU同存储器和I/O设备之间的接口部件,负责CPU与存储器和I/O端口传送信息。
3. 8086状态标志和控制标志分别有哪些?程序中如何利用这些标志?6位状态标志为:⑴符号标志SF:若运算结果的最高位为1。
则SF=1,否则为0。
⑵零标志ZF:若运算结果为零,则ZF=1,否则ZF=0。
⑶奇偶标志PF:若指令的执行结果低8位中"1"的个数为偶数,则PF=1,否则为0。
⑷进位标志CF:当执行一个加法运算使最高位(字节操作的D7或字操作的D15)产生进位,或执行减法运算使最高位产生借位时,则CF=1,否则CF=0。
⑸辅助进位标志AF:当执行加法运算时,D3位向D4有进位,或作减法运算时,D3位向D4有借位,则AF=1,否则为0。
⑹溢出标志OF:在算术运算中,当补码运算结果超出了带符号数的表达范围,即字节运算的结果超出-128~+127,或者字运算结果超出-32768~+32767时,OF=1,否则为0。
3位控制标志为:⑴方向标志DF:这是处理串操作指令中信息方向的标志。
若DF=1,则串操作指令按自动减址操作,即串操作从高地址向低地址方向进行处理;若DF=0,则使串操作指令按自动增量修改地址指针,即串操作从低地址向高地址方向进行处理。
⑵中断允许标志IF:该标志用于对可屏蔽中断进行控制,若IF=0,则CPU拒绝外部INTR中断请求,本标志对内部中断和不可屏蔽中断不起作用。
⑶跟踪标志TF:若设置TF=1,则CPU按单步方式执行指令,以调试程序。
plc指令

CPM1A PC
模式 输入功能 输入模式 计数频率 计数区间 控制方法
区间比较控制:
递增 00000:计数输入 单独输入 5.0 kHz 0 最多可注册8对上,下限值和相应的
00001:见注 (最大值) ~ 中断子程序号
0 0 0
0 0 0
增/减 F003 2767~0003 2767 (–32,767~32,767)
SR 248中的最左边位为符号位。F表示负数,0表示正数。
递增 0000 0000~0006 5535 (0~65,535)
0:Z相+软件复位
1:软件复位
08~15 设置计数器 01 01 00
NC
24VDC
83
高速计数器信号可以输入到CPU的位00000~00002。
CPM1 PC
0 1 2
003 以定时间隔中断模式启动间隔计时器
DM 0010 指定存储设定值开始字
#0004 设定递减计数器的设定值为4。
DM 0010 (BCD: 0000~9999)
(定时间隔中断模式) 断,中断将序号为23执行中断子程序。
25315首次循环标志保持ON为一个循环
MOV(21)
位 递增 增/减 不使用
00~03 设置计数器模式 4 0 0或4
CPM1/CPM1A的中断功能 第2-3节
应用实例 在本实例中,输入00005变为ON以后,每经过4.0ms(1.0 ms ×4),产生一次中
增/减模式
A相与两相信号 (A相和B相)4倍量的差分及Z相信号作为输入。根据两相
信号的差分,计数器进行递增或递减。
精品工程类本科大三课件《建筑环境学》07第七章第 5节 噪声的控制与治理方法
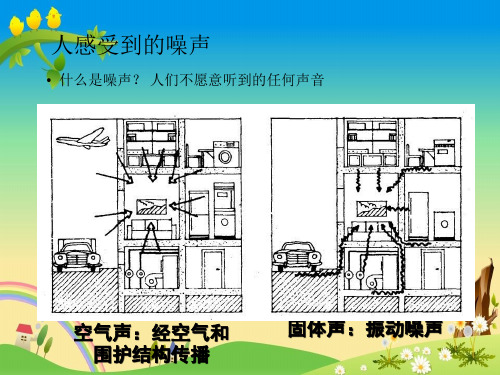
城市噪声的控制
• 避免交通噪声和工厂噪声干扰居住区 • 利用临街的建筑物作为后面建筑的防噪屏障 • 严格施工噪声管理 • 对居住区,锅炉房、水泵房、变电站等应采取消声建造措施,并布置
边缘角落处
室内设备噪声控制
(1)改革工艺和操作方法来降低噪声 (2)降低噪声源的激振力 (3)降低噪声辐射部件对激振力的响应 ——需要说明的是: • 设备噪声的降低,意味着性能提高和寿命延长。 • 机械产品本身的噪声级,可以做为评价其本身综合性能的一项重
• 风机、水泵的出口加软管连接,也是隔振的一种方式。
隔振器
橡
精密磨床隔振基础
胶
隔
振
垫
振动传递
• 如某个产生振动的设备与一构件 (固有频率f0)相连,则通过这个构 件传导出去的振动动力占振源输 入动力的百分比称作振动传递比 T
1 T ( f / f0 )2 1
隔振结构固有频率 f0 比振源频率f 越低,振动传递比就越小,隔振效
• 吸声尖劈用于半消声室、全消声室,尺寸可根 据用户要求定制。
吸声减噪法使用原则
1.只能取得 4~12dB的降噪效果,因仅能减少反射声(混响声)
• ——不可能通过吸声处理得到更大的减噪效果
2.在靠近声源、直达声占支配地位的场所,采用吸收减噪法将不会得到 理想的降噪效果。
3.室内平均吸声系数较小时,吸声减噪法收效最大。
• 原理:利用布置在管内壁上的吸声材料或吸声结构的吸声作用,使沿管道 传播的噪声迅速随距离衰减,从而达到消声的目的
(1)在总图设计时应按照“僻静分开” 的原则对强噪声源的位置合理地布置
• 将高噪声车间与办公室、宿舍分开。 • 在车间内部,把高噪声的机器与其他机器设备隔离开来,尽可能集
微型计算机原理与接口技术课后习题参考答案

《微型计算机原理与接口技术》习题与思考答案第1章微型计算机概论1.1 A B C 1.2 B 1.3 B 1.4 C 1.5 A B C 1.6 B D1.7 00000111B=7D=07H 11010100B=212D=D4H01101010B=106D=6AH 10110.101B=22.625D=16.AH11001.011B=25.375D=19.6H1.8 127D=11111111B=FFH 12.625D=1100.101B=C.AH225.9375D=11100001.1111B=E1.FH 18.3l25D=10010.0101B=12.5H206.125=11001110.001B=CE.2H1.9 10H=10000B=16D 0.A8H=0.10101B=0.65625D28.9H=101000.1001B=40.5625D 4B.2AH=1001011.0010101B=75.6762D20E.4H=1000001110.01B=526.25D1.10 [+37]原=00100101B [+37]反=00100101B [+37]补=00100101B [+37]过余=10100101B[+94]原=01011110B [+94]反=01011110B [+94]补=01011110B [+94]过余=11011110B[-11]原=10001011B [-11]反=11110100B [-11]补=11110101B [-11]过余=01110101B[-125]原=11111101B [-125]反=10000010B [-125]补=10000011B [-125]过余=00000011B 1.11补码00010101B的真值为+21D 补码41H的真值为+65D补码9BH的真值为-101D 补码FFH的真值为-1D补码11110101B的真值为-11D1.12 A的ASCII码为41H a的ASCII码为61Hg的ASCII码为67H z的ASCII码为7AH0的ASCII码为30H 9的ASCII码为39H*的ASCII码为2AH +的ASCII码为2BHCR的ASCII码为0DH %的ASCII码为25H1.12一个16×16字形点阵占用存储空间32B一个24×24字形点阵占用存储空间72B一个32×32字形点阵占用存储空间128B1.14 (以8位补码为例)[X]补+[Y]补=[+38]补+[+100]补=0001010B,溢出[X]补+[Z]补=[+38]补+[-20]补=00010010B,未溢出[Y]补- [Z]补=[+100]补- [-20]补=01111000B,未溢出[Z]补- [X]补=[-20]补- [+38]补=11000110B,未溢出1.15 X与Y=0100B X或Z=1111B Y异或Z=1101B 非Y=1001B1.16微型计算机具有体积小、重量轻、功耗低;功能强;可靠性高;价格低廉;结构灵活、适应性强;使用方便、维护容易等特点。
污废水处理-第07章(污泥处理与处置 )

3、离心浓缩法 1)离心浓缩法原理 根据污泥中固、液比重不同,在高速旋转的机械中具 有不同的离心力而进行分离浓缩。 2)气浮浓缩装置的种类和特点 离心机:转盘式离心机;螺旋卸料离心机;筐式离心 机。 3)离心浓缩装置的主要技术参数和运行时注意的问 题
四、污泥消化
污泥消化是利用微生物的代谢作用,使污泥中的有 机物质稳定化,减少污泥体积,降低污泥中病原体数量。 (一)厌氧消化原理和功能 机理与废水厌氧消化相同。消化后的污泥称熟污泥 和消化污泥。消化后污泥体积可以减少60%~70%。 (二)污泥厌氧消化法的分类 低负荷消化法;高负荷消化法;两相消化法。
第七章 污 污泥消化 沼气的应用 污泥的脱水与干化 污泥干燥与焚烧
污泥的处置与利用
一、概述
(一)污泥的来源与分类 污泥按来源和成分不同,主要可分为: 初次沉淀污泥;剩余活性污泥与腐殖污泥;消 化污泥;化学污泥;有机污泥;无机污泥. (二)污泥的性质指标 污泥的性质指标主要包括: 含水率;污泥的比重;污泥的比阻;毛细吸水 时间;挥发性固体和灰分;污泥的可消化程度;污 泥的肥分;污泥的卫生学指标
八、污泥的处置与利用
有机污泥用于工业(堆肥); 污泥固化; 污泥填埋; 污泥中有用物质的回收;
沼气发动机; 沼气锅炉; 废气燃烧气; (四)沼气系统的日常运行管理
六、污泥的脱水与干化
污泥经浓缩消化处理后,含水率尚有95~96%。 (一)污泥的机械脱水 1.原理:是以压力差作为推动力,强制将滤液和滤饼分开的过 程。 2.机械脱水的预处理--污泥调理 有机污泥大小不均而且很细,VSS较高,比阻大,脱水性能较 差,不宜进行机械脱水,必须进行调理。 常用的污泥调理方法:化学调理;物理调理;水力调理(淘 洗)。
二、污泥贮存与运输
《计算机体系结构设计》第07章 并行处理与普适计算

多核CPU,每个处理器核内部有多级指令流水线。 资源共享(Resource Sharing):
是一种软件方式,利用软件让多个用户按一定时间顺序 轮流地使用同一套资源,以提高其利用率,这样相应地提高 整个系统的性能。例如多道程序分时系统。
7.3.2 多处理机系统中的存储器管理
(1)集中共享(共享存储)的并行处理机
每个PE没有局部存触器,存储模块以集中形式为所有
PE共享。
CU
SC
PE0 PE1
… PEN-1
ICN
MM0 MM1
… MMN-1
I/O-CH I/O … SM 图7.15 集中共享存储器结构
(2)分布共享(分布存储)的并行处理机
7.1 并行计算机系统结构 7.2 单处理机系统中的并行机制 7.3 多处理机系统的组织结构 7.4 多处理机操作系统和算法 7.5 从计算机到网络 7.6 普适计算和移动计算 习题7
7.1.1 指令级并行和机器并行
1 并行性(Parallelism)
并行计算机系统最主要的特性就是并行性 (Parallelism),并行性是指计算机系统具有的同时运算或 同时操作的特性,它包括同时性与并发性两种含义。 同时性(Simultaneity):指两个或多个事件在同一时刻
发线程级并行和指令级并行的技术,使用的是线程级并行 性(Thread Level Parallelism,简称TLP)。
实现多线程有两种主要的方法: 细粒度(Fine-Grained)多线程 粗粒度(Coarse-Grained)多线程
7.2.2 单片多核处理器CMP
单芯片多处理器(Chip Multiprocessors,CMP)与同时 多线程处理器(Simultaneous Multithreading,SMT),这
第07章酸化处理

酸化的分类 按不同的分类习惯和方法,可将其分成多类: 按施工所用酸液体系分类 (1)常规酸化 在灰岩中,“常规”是指盐酸(15~28%HCl) 和添加剂组成的混合液;对于砂岩,则是指盐酸 (5~8%HCl)与氢氟酸(3~5%HF)的混合酸 (土酸)和各种添加剂酿成的混合液。 (2)降阻酸酸化 在常规酸液中添加一定比例的降阻剂(3~ 10%),可使泵注时酸液在管线中的流动摩阻损 失降低40~60%。降阻剂通常为高分子材料。
C S C KC n DH t V y
酸液浓度梯度 面容比 H+的传质系数 酸岩瞬间的反应速度 面容比: 岩石反应表面积与酸液体积之比
(二)影响酸岩复相反应速度的因素分析
1、面容比 面容比越大,反应速度也越快 2、酸液的流速 酸液流动速度增加,反应速度加快
24%~25%
1)根据物理参数计算皮克利特数NP
2)根据给定裂缝中任意断面的位置x,计算相应的无 因次距离LD
3)利用计算图,两坐标位置的垂线相交,得到x位置 的无因次酸浓度值,即任意断面位置x的酸浓度C值。
方法二:(已知C/C0)
根据皮克利特数NP ,给定的C/C0值,利用图版查出相 应的无因次距离LD 。从而算出酸浓度降至预定的C/C0 时,活性酸的有效作用距离x值。
物理模拟
确定H+传质系数DH+
1.酸液在裂缝中流动反应的偏微分方程 基本假设: ①恒温恒压下,酸沿裂缝呈稳定层流状态; ②酸液为不可压缩液体; ③酸密度均一; ④传质系数与浓度无关。
C C 2C uy DH 对流扩散偏微分方程: u x x y y 2
2.酸浓度分布规律及计算图的应用 裂缝入口端酸浓度为初始浓度C0 裂缝壁面处,对盐酸与石灰岩反应来说,表面反应速度 与传质速度相比,可视为无限大,故壁面上的酸浓度C=0 裂缝中心位置且垂直于壁面的方向上,酸浓度梯度为零
GDMC191XXXX MCU规格说明书
GDMC191XXXX SPEC V1.1EEPROM 、12bit-ADC 的触控MCU第1章 GDMC191XXXX MCU 整体介绍1.1.特性简介1.2.整体概述GDMC191XXXX 采用高速8051内核,1T指令周期,相比于标准的8051(12T)指令周期,具有更快的运行速度,同时兼容标准8051指令。
GDMC191XXXX 包含外设有看门狗、按键检测、IIC、UART、低电压检测、掉电复位、、Timer0、Timer1、Timer2、12bit 逐次逼近ADC、低功耗模式等。
GDMC191XXXX 集成的电容检测通道,它可以用来检测近距离感应或者触摸。
其内置MCU,可灵活配置;通过配置可实现按键、滚轮、滑条等多种应用。
按键都能独立的运行,并且每个按键都能通过对相应的功能寄存器来调节灵敏度。
1.3.系统框图Array系统框图系统总线架构图1.4.时钟框图Array时钟方框图1.5.选型列表选型列表1.6.引脚配置1.6.1. GDMC191S20BGDMC191S20B SOP20封装引脚图1.6.2. GDMC191S20CGDMC191S20C SOP20封装引脚图COM7/SNS07/PB0SNS14/PC7SNS13/PC6SNS12/PC5SNS11/PC4SNS10/PC3SNS08/PC1VSS VCCPD1/SNS16/ADC16/PWM1PD2/SNS17/ADC17/PWM2PD3/SNS18/ADC18PD4/SNS19/ADC19PD5/SNS20/ADC20PD6/SNS21/ADC21SNS15/PC0PA1/ADC24/TCK/RXD0_A/SCL/PGC PA0/ADC25/TDI/TXD0_A/SDA/PGDPD7/ADC22/INT1/TMS PD0/ADC23/INT2/TDOPWM1/INT0/SNS16/PD1PGD/SDA/TXD0_A/TDI/PA0PGC/SCL/RXD0_A/TCK/PA1TDO/INT2/PD0TMS/INT1/SNS22/PD7SNS21/PD6SNS20/PD5SNS12/PC5ADC11/PC4VCCPB1/SNS00/COM0/ADC00/PWM0_A PB2/SNS01/COM1/ADC01PB3/SNS02/COM2/ADC02PB4/SNS03/COM3/ADC03PB5/SNS04/COM4/ADC04VSSPC2/SNS09/ADC09PC3/SNS10/ADC10PB6/SNS05/COM5/ADC05PB7/SNS06/COM6/ADC061.6.3. GDMC191S28CGDMC191S28C SOP28封装引脚图COM7/SNS07/PB0COM6/SNS06/PB7COM5/SNS05/PB6COM4/SNS04/PB5COM3/SNS03/PB4COM2/SNS02/PB3COM1/SNS01/PB2VSS VCCSNS10/PC3SNS11/PC4PC5/SNS12/ADC12PC6/SNS13/ADC13PC7/SNS14/ADC14PC0/SNS15/ADC15PD1/INT0/PWM1PD2/PWM2PA1/ADC24/TCK/RXD0_A/SCL/PGC PA0/ADC25/TDI/TXD0_A/SDA/PGDCOM0/SNS00/PB1SNS09/PC2PD3/ADC18PD4/ADC19PD5/ADC20PD6/ADC21PD7/ADC22/TMS/INT1PD0/ADC23/TDO/INT2SNS08/PC11.6.4. GDMC191M28CGDMC191M28C SOP28封装引脚图ADC14/SNS14/PC7ADC13/SNS13/PC6ADC12/SNS12/PC5ADC11/PC4ADC10/PC3ADC09/PC2SNS08/PC1COM6/PB7COM5/PB6PWM2/ADC17/SNS17/PD2PD3PD4/SNS19PD5/SNS20PD6/SNS21/ADC21PD7/SNS22/ADC22/TMS/INT1PD0/SNS23/ADC23/TDO/INT2PA1/SNS24/ADC24/TCK/RXD0_A/SCL/PGC PB4/COM3PB5/COM4COM7/SNS07/PB0PWM1/ADC16/SNS16/PD1PA0/SNS25/ADC25/TDI/TXD0_A/SDA/PGD VCC VSS PB1/COM0PB2/COM1PB3/COM2ADC15/SNS15/PC01.7.引脚说明1.7.1. GDMC191S20B引脚说明1.7.2. GDMC191S20C引脚说明1.7.3. GDMC191S28C引脚说明1.7.4. GDMC191M28C引脚说明第2章电气特性2.1.AC特性AC特性参数表OSC温度特性趋势曲线2.2.DC特性DC特性参数表2.3.ADC特性ADC特性参数表2.4.极限参数极限特性参数表注:超过极限参数所规定的范围将对芯片造成损害,无法预期芯片在上述标示范围外的工作状态,而且若长期在标示范围外的条件下工作,可能影响芯片的可靠性。
第07章逻辑链路控制资料课件
• 等收方收到了正确的4号帧后,将窗口中的4~7 号帧一并上交网络层,发出对7号帧的累计确认, 接收窗口也同时向前滑动4个号。
• 后来随着技术的发展,分委员会又扩大到13个,分 别对宽带技术、光纤技术、综合话音数据网技术、 可互操作局域网的安全、无线局域网技术以及新型 局域网技术进行研究。
• IEEE802提出的局域网通信标准,主要包含了相当于 ISO/OSI标准的下两层, 即物理层与数据链路层。
10/3/2023
3
第7章 逻辑链路控制
10/3/2023
12
7.2 数据链路控制机制
在介绍IEEE802.2逻辑链路控制协议 之前,本小节先介绍一下在数据链路控制 协议中广泛使用的控制机制,主要是流量 控制和差错控制机制。它们会出现在绝大 多数数据链路控制协议中。
10/3/2023
13
7.2.1 引言
• 数据链路 (data link) 可以想像为一个数字管道, 在它上面可以进行数据通信。除了必须有一条 物理的链路之外,还有必要的规程来控制这些 数据的传输过程。把实现这些规程的硬件和软 件加到物理链路上,就构成了所谓的数据链路。
24
图7.4 发送窗口控制发送端的流量
10/3/2023
25
图7.5 接收窗口控制接收
10/3/2023
26
7.2.3 回退-N ARQ
超时重传-回退N:
• 图7.4和图7.5所示收发过程中,如果发方数据帧丢 失、出错或收方确认帧丢失等,都会引发重传。
• 以图5.4(c)为例, 4号帧由于信道中的噪声干扰, 收方收到后MAC层报告说有检验错误,于是收方丢 弃之,不会发回确认帧。
10/3/2023
22
7.2.3 回退-N ARQ
7-功能指令0
第7章 功能指令
1. PLC起初被看作是继电器,定时器,计数器的集 合。 2. 本质上,PLC就是工业控制计算机。为了使PLC 在其基本逻辑功能,顺序步进功能之外具有更近 一步的特殊功能,满足PLC用户的特殊要求,从 80年代开始,PLC制造商就逐步地在小型PLC 上加入一些功能指令或称为应用指令。 3. 这些功能指令实际上就是一个个功能不同的子程 序. 4. 大大提高了PLC的实用价值。
BIN加法指令
第7章 功能指令
7.4.2 BIN减法指令
BIN减法指令表 操作元件: SUB FNC21 程序步数:SUB和SUB(P) 7步 (P) (16/32) (D)SUB和(D)SUB(P) 13步 BIN减法 标志:M8020(零标志),M8021(借位), M8022(进位)
BIN减法指令
MOV
D0V
D10Z
第7章 功能指令
可以用变址寄存器进行变址的软元件是X、Y、M、S、 P、T、C、D、K、H、KnX、KnY、KnM、 KnS(Kn△为位组合元件)。例如V=6,则K20V为
K26(20+6=26);如果V=7,则K20V变为
K27(20+7=27)。 但是,变址寄存器不能修改V与Z本身或位数指定用 的Kn参数。例如K4M0Z有效,而K0ZM0无效。
指令之间。
第7章 功能指令
7.2.5 监控定时器指令
监控定时器指令表 WDT FNC07 (P) 监控定时器 操作元件:无 程序步数:1步
WDT(Watch Dog Timer),又称看门狗,用于监控定时器
的刷新,在执行FEND或者END指令时,监控定时器将被刷 新(复位)。
FX系列PLC的监控时钟缺省值为100ms,可用D8000来设
指令-程序控制+中断+高速计数

HSC0操作模式
HSC1操作模式
HSC2操作模式
HSC3操作模式
HSC4操作模式
HSC5操作模式
模式0,1或2内部方向控制模式时序图
模式3,4或5外部方向控制模式时序图
模式6,7或8增/减双脉冲模式时序图
模式9,10或11正交1X模式时序图
模式9,10或11正交4X模式时序图
访问高速计数器(HC)
0
EVNT DTCH EN ENO
Network 3 M0.0 I0.0
2
EVNT T32 EN TON
+30000 Network 4 M0.0 I0.1 +30000
PT
EN PT
T96 TON
LD M0.0 TON T40, 400
LD T40 +I 20, VW102 MOVW VW102, VW104 -I VW100, VW104 AW> VW104, 200 = Q1.0
For-Next循环指令
• FOR和NEXT指令可以描述需重复进行一定次数的循环体。每条FOR 指令必须对应一条NEXT指令。For-Next循环嵌套(一个For-Next循 环在另一个For-Next循环之内)深度可达8层。 • FOR-NEXT指令执行FOR指令和NEXT指令之间的指令。必须指定计 数值或者当前循环次数INDX、初始值(INIT)和终止值(FINAL)。 • NEXT指令标志着FOR循环的结束。 • 如果允许FOR/NEXT循环,除非在循环内部修改了终值,循环体就一 直循环执行直到循环结束。当FOR/NEXT循环执行的过程中可以修改 这些值。当循环再次允许时,它把初始值拷贝到INDX中(当前循环 次数)。 • 当下一次允许时,FOR/NEXT指令复位它自己。例如,给定初值 (INIT)为1,终值(FINAL)为10,那么随着当前计数值(INDX) 从1增加到10,FOR与NEXT之间的指令被执行10次。 • 如果初值大于终值,那么循环体不被执行。每执行一次循环体,当前 计数值增加1,并且将其结果同终值作比较,如果大于终值,那么终 止循环。 • 如果程序进入FOR--NEXT循环时,栈顶值为1,则当程序退出FORNEXT循环时,栈顶值也将为1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
【例7-1】在I0.0的 上升沿通过中断使 Q0.0立即置位。在 I0.1的下降沿通过 中断使Q0.0立即复 位。程序设计如图 7-2所示。
INT_1 3
INT EVNT ENI
网络 2 SM5.0 EN 网络 3 M5.0 DISI 中断程序 0(INT_0) 网络 1 SM0.0 Q0.0 SI 1 中断程序 1(INT_1) 网络 1 SM0.0 Q0.0 RI 1 图 7-2 0 EVNT DTCH ENO
OB1 主程序 网络 1 LD MOVB MOVB SM0.1 0 , VB10 // 首次扫描时为 1 // 中断次数计数器清 0
250 , SMB34 // 设定时中断 0 的时 间间隔为 250ms
ATCH
INT_0 , 10
// 连接 INT_0 到定时中 断 0 (事件号 10 )
ENI
// 允许全局中断
• 定时中断一旦被允许,中断就会周期性地不断产生,每当 定时时间到时,就会执行被连接的中断程序。如果退出 RUN状态或定时中断被分离,定时中断被禁止。如果执 行了全局中断禁止指令,定时中断事件仍会连续出现,每 个定时中断事件都会进入中断队列,直到中断队列满。
• 【例7-2】定时中断的定时时间最长为255ms,用定时中 断1实现周期为2s的高精度定时。 • 为了实现周期为2s的高精度周期性操作的定时,将定时中 断的定时时间间隔设为250ms,在定时中断1的中断程序 中,将VB0加1,然后用比较触点指令“LD=”判断VB0是 否等于8。若相等(中断了8次,对应的时间间隔为2s), 在中断程序中执行每2s一次的操作,例如采集模拟量输入 的数值和使QB0加1,程序设计如图7-3所示。 • 对于定时间隔不同的任务,可以计算出它们的定时时间的 最大公约数,以此作为定时中断的预置时间。在中断程序 中对中断事件进行计数,根据计数值来处理不同的任务。
7.1.2 中断指令
各种中断指令的LAD指令格式如图7-1所示。LAD指令名称及 STL指令格式如表7-1所示,指令的有效操作数见表7-2。
ATCH EN INT EVNT 图 7-1 中 断 指 令 的 LAD 指 令 格 式 ENO EN EVNT DTCH ENO CLR_EVNT EN EVNT RETI ENO ENI DISI
各计数器有专用的时钟脉冲、方向控制、复位及启动输入端子, 有的计数器只有部分输入端子。各高速计数器的外部输入信 号如表7-6和表7-7所示。只有CPU224、CPU226和 CPU226XM有HSC1和HSC2。
表7-7 HSC1和HSC2的外部输入信号
HSC1 模 式 0 1 2 3 4 5 6 I0.6 时钟 时钟 时钟 时钟 时钟 时钟 加时钟 方向 方向 方向 减时钟 复位 复位 启动 复位 复位 启动 I0.7 I1.0 I1.1 I1.2 时钟 时钟 时钟 时钟 时钟 时钟 加时钟 方向 方向 方向 减时钟 复位 复位 启动 复位 复位 启动 I1.3 HSC2 I1.4 I1.5
OB1 主程序 网络 1 MOV_B SM0.1 EN ENO 0 IN OUT MOV_B EN 250 IN ENO OUT ATCH EN INT_0 10 INT EVNT ENI 中断程序 0(INT_0) 网络 1 SM0.0 EN VB10 网络 2 8 = =B VB10 IN INC_B ENO OUT MOV_B EN 0 IN ENO OUT MOV_W EN AIW0 IN INC_B EN QB0 IN ENO OUT QB0 ENO OUT VW20 VB10 VB10 ENO SMB34 VB10
AIW0 , VW20 QB0
// 每 2s 将 QB0 加 1
定时中断采集模拟量
2.中断优先级
给中断源指定处理的次序就是给中断源确定中断优先级。
中断按以下固定的优先级顺序执行:通信(最高优先级)、I/ O中断和定时中断(最低优先级)。在上述3个优先级范围内, CPU按照先来先服务的原则处理中断,任何时刻只能执行 一个用户中断程序。3个中断队列及其能保存的最大中断 个数如表7-4所示。 如果发生中断过于频繁,使中断产生的速率比可处理的速 率快,或中断被DISI指令禁止,中断队列溢出状态位被置 1,如表7-5所示。只应在中断程序中使用这些位,因为当 队列变空或返回主程序时,这些位会被复位。
// 当 M5.0 接通时,禁止所有中端
中断程序 1 ( INT_1 ) 网络 1 LD RI SM0.0 Q0.0 , 1 // 使 Q0.0 立即复位
I/O 中断应用
(3)时基中断
• 时基中断(Timed Interrupt)包括定时中断和定时器 T32/T96中断。可用定时中断来执行一个周期性的操作, 以1ms为增量单位,周期的时间可取lms~255ms。对定 时中断0,必须把周期时间写入SMB34;对定时中断1, 必须把周期时间写入SMB35。
OB1 主程序 网络 1 SM0.1 EN INT_0 0 INT EVNT ATCH EN ENO ATCH ENO
OB1 主程序 网络 1 LD ATCH ATCH ENI 网络 2 LD DTCH 网络 3 LD DISI 中断程序 0 ( INT_0 ) 网络 1 LD SI SM0.0 Q0.0 , 1 // 总为 ON // 使 Q0.0 立即置位 SM5.0 0 M5.0 // I/O 错误标志位 // 禁止 I0.0 的上升沿中断 SM0.1 // 首次扫描时为 1 // 定义 I0.0 的上升沿 中断程序为 INT_0 INT_1 , 3 // 连接 INT_1 到 I0.1 的下降沿中断(事件 3 ) // 允许全局中断 INT_0 , 0
编码器分为以下2种类型: (1)增量式编码器
根据输出信号的个数,有3种增量式编码器: 1)单通道增量式编码器 2)双通道增量式编码器 3)三通道增量式编码器
A相 B相 90℃ a)A、B 相型编码器正转
A相 B相 b)A、B 相型编码器反转 图 7-4 编码器的输出波形
A相 B相 Z相 c)三 通 道 增 量 式 编 码 器
(2)绝对式编码器
• N位绝对式编码器有N个码道,最外层的码 道对应编码的最低位。每一码道有一个光 电耦合器,用来读取该码道的0、1数据。 绝对式编码器输出的N位二进制数反映了运 动物体所处的绝对位置,根据位置的变化 情况,可以判别出旋转的方向。
2.高速计数器的工作模式与外部输入信号
(1)高速计数器的工作模式
3.中断控制
• 经过中断判优后,将优先级最高的中断请 求送给CPU,CPU响应中断后自动保存逻 辑堆栈、累加器和某些特殊标志寄存器位, 即保护现场。中断处理完成后,又自动恢 复这些单元保存起来的数据,即恢复现场。
7.2 高速处理指令
• 高速处理指令有高速计数指令和高速脉冲输出指 令两类。
• 7.2.1 高速计数操作指令
队列 CPU224 CPU226
CPU221、CPU222、 CPU224XP、
描述(0=不溢出,1=溢出)
SM位
通信中断队列溢出
SM4.0
通信中断队列
I/O中断队列 定时中断队列
4
16
I/O中断队列溢出
SM4.1
定时中断队列溢出 8
SM4.2
表7-4各中断队列的最大中断个数
表7-5 中断队列溢出标志位
7.1.3 中断源
• 1.中断源及种类
中断源是中断事件向PLC发出中断请求的来源。 S7-200 CPU最多可以有34个中断源,这些中断 源大致分为三大类:通信口中断、输入/输出 (I/O)中断和时基中断。 (1)通信口中断 (2)I/O中断 I/O中断包括上升沿中断或下降沿中断、高速计数器 (HSC)中断和脉冲串输出(PTO)中断。CPU 可用输入点I0.0~I0.3的上升沿或下降沿产生中断。
2.中断连接指令与中断分离指令
• 中断连接指令(ATCH,Attach Interrupt)用来建 立中断事件EVNT(由中断事件号指定)和处理 此事件的中断程序INT(由中断程序号指定)之间 的联系,并使能该中断事件。 • 中断分离指令(DTCH,Detach Interrupt)用来 断开中断事件(EVNT)与中断程序(INT)之间 的联系,并禁止该中断事件。 • 消除中断事件指令(CEVNT,Clear Event)从中 断队列中清除所有EVNT类型的中断事件。
• 中断程序必须由三部分构成:中断程序标号(即 中断事件的编号)、中断程序指令和无条件返回 指令。 • 在中断程序中不能使用DISI、ENI、HDEF、 LSCR和END指令。 • 在主程序和中断程序之间正确共享数据的编程技 巧有以下3条: • (1)STL程序共享单个变量 • (2)LAD程序共享单个变量 • (3)STL或LAD程序共享多个变量
CEVNT EVNT
消除中断事件
表7-2 中断指令的有效操作数
输入/输出 数据类型 操作数范围
IN
BYTE
常数(0~27)
EVNT
BYTE
常数 CPU221和CPU222: 0~12,19~23和27~33 CPU224:0~23和27~33 CPU224XP和CPU226: 0~33
1.全局性的中断允许指令与中断禁止
指令
• 中断允许指令(ENI,Enable Interrupt)全局性 地允许所有被连接的中断事件。 • 禁止中断指令(DISI,Disable Interrupt)全局性 地禁止处理所有中断事件,允许中断排队等候, 但是不允许执行中断程序,直到用全局中断允许 指令ENI重新允许中断。 • 进入RUN模式时自动禁止中断。 • 中断程序有条件返回指令(CRETI,conditional Return from Interrupt)在控制它的逻辑条件满足 时从中断程序返回。
表7-1 中断指令的LAD名称及STL指 令格式