曲柄滑块四杆机构-压力角(传动角)的定义及其计算
机械原理四连杆机构讲课文档

图4-11 起重机起重机构
现在三十六页,总共八十六页。
两摇杆长度相等的双摇杆机构,称为等 腰梯形机构。
图4-12所示,轮式车辆的前轮转向机 构就是等腰梯形机构的应用实例。
现在三十七页,总共八十六页。
图4-12 汽车前轮转向机构
现在三十八页,总共八十六页。
当车转弯时,与前轮轴固联的两个摇杆
此时移动方位线mm不通过曲柄回转中 心,故称为偏置曲柄滑块机构。曲柄转动中
心至其移动方位线mm的垂直距离称为偏距e, 当移动方位线mm通过曲柄转动中心A时 (即e=0),则称为对心曲柄滑块机构。
现在五十三页,总共八十六页。
2.导杆机构
图4-16a)所示为曲 柄滑块机构。
若取曲柄为机架, 则为演变为导杆机构, 如图4-16b)所示。
以l1、l2、l3、l4表示。为了保证曲柄1整周 回转,曲柄1必须能顺利通过与机架4共线 的两个位置AB’和AB’’。
现在四十页,总共八十六页。
图4-13 曲柄存在的条件分析
现在四十一页,总共八十六页。
当曲柄处于AB’ 时,形成三角形B’C’D。 根据三角形两边之和必大于第三边,可得
l2≤(l 4- l 1)+ l 3 l 3≤(l 4-L1)+ l 2
现在四十三页,总共八十六页。
上述关系说明:曲柄存在的必要条件: (1) 在曲柄摇杆机构中,曲柄是最短杆;
(2) 最短杆与最长杆长度之和小于或等 于其余两杆长度之和。
现在四十四页,总共八十六页。
如何得到不同类型的铰链四杆机构?
根据以上分析可知:
当各杆长度不变时,取不同杆为机架 就可以得到不同类型的铰链四杆机构。
摆到极限位置C1D和C2D时,连杆2与曲柄1 共线,若不计各杆的质量,则这时连杆加 给曲柄的力将通过铰链中心A,即机构处
机械设计基础试题及答案

A 卷一、简答与名词解释(每题5分,共70分)1。
简述机构与机器的异同及其相互关系答. 共同点:①人为的实物组合体;②各组成部分之间具有确定的相对运动;不同点:机器的主要功能是做有用功、变换能量或传递能量、物料、信息等;机构的主要功能是传递运动和力、或变换运动形式。
相互关系:机器一般由一个或若干个机构组合而成。
2。
简述“机械运动”的基本含义答. 所谓“机械运动"是指宏观的、有确定规律的刚体运动.3。
机构中的运动副具有哪些必要条件?答。
三个条件:①两个构件;②直接接触;③相对运动。
4. 机构自由度的定义是什么?一个平面自由构件的自由度为多少?答。
使机构具有确定运动所需输入的独立运动参数的数目称机构自由度。
平面自由构件的自由度为3。
5。
机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答. 机构具有确定运动条件:自由度=原动件数目。
原动件数目<自由度,构件运动不确定;原动件数目〉自由度,机构无法运动甚至构件破坏.6. 铰链四杆机构有哪几种基本型式?答. 三种基本型式:曲柄摇杆机构、双曲柄机构和双摇杆机构。
7。
何谓连杆机构的压力角、传动角?它们的大小对连杆机构的工作有何影响?以曲柄为原动件的偏置曲柄滑块机构的最小传动角min γ发生在什么位置?答. 压力角α:机构输出构件(从动件)上作用力方向与力作用点速度方向所夹之锐角;传动角γ:压力角的余角.α+γ≡900。
压力角(传动角)越小(越大),机构传力性能越好.偏置曲柄滑块机构的最小传动角γmin 发生在曲柄与滑块移动导路垂直的位置8. 什么是凸轮实际轮廓的变尖现象和从动件(推杆)运动的失真现象?它对凸轮机构的工作有何影响?如何加以避免?答。
对于盘形凸轮,当外凸部分的理论轮廓曲率半径ρ与滚子半径r T 相等时:ρ=r T ,凸轮实际轮廓变尖(实际轮廓曲率半径ρ’=0).在机构运动过程中,该处轮廓易磨损变形,导致从动件运动规律失真。
机械原理 第三章 平面连杆机构及其设计

2
二、连杆机构的特点 优点:
• 承受载荷大,便于润滑
• 制造方便,易获得较高的精度 • 两构件之间的接触靠几何封闭实现 • 实现多种运动规律和轨迹要求
y B a A Φ b β c ψ ψ0 C B φ A D M3
3
连杆曲线
M
M1
M2
连杆
φ0
d
D
x
缺点:
• 不易精确实现各种运动规律和轨迹要求;
27
55
20
40
70
80 (b)
例2:若要求该机构为曲 柄摇杆机构,问AB杆尺寸 应为多少?
解:1.设AB为最短杆
即 LAB+110≤60+70 2.设AB为最长杆 即 LAB+60≤110+70 3.设AB为中间杆 即 110+60≤LAB+70 100≤LAB LAB≤120 A
70
C
60
B
110
FB
D
36
2、最小传动角出现的位置
C b
F VC
B
c
A
d
D
当 为锐角时,传动角 = 当为钝角时,传动角 = 180º - 在三角形ABD中:BD² =a² +d² -2adcos 在三角形BCD中:BD² =b² +c² -2bccos (1) (2)
37
由(1)=(2)得:
b2 c 2 a 2 d 2 2ad cos cos 2bc
1)当 = 0º 时,即曲柄与机架重叠共线,cos =+1, 取最小值。
min
b c (d a ) arccos 2bc
机械设计复习题.

机械设计复习题.第1、2章平⾯机构的⾃由度和速度分析1. 什么是零件、构件、机构、机器、机械?它们有什么联系?⼜有什么区别?答:机器:通常将能够实现确定的机械运动,⼜能做有⽤功的机械功或实现能量、物料、信息的传递与变换的装置称为机器。
机构:只能实现运动和⼒的传递与变换的装置称为机器。
机械:机器和机构统称为机械。
零件:机器中每⼀个独⽴制造的单元体称为零件。
构件:机器中每⼀个独⽴运动的单元体称为构件。
2.何谓通⽤零件、专⽤零件?分别举例说明答:通⽤零件:各种机械中普遍使⽤的零件称为通⽤零件,如螺钉、轴、轴承等。
专⽤零件:在某⼀类型机械中使⽤的零件称为专⽤零件,如内燃机活塞、曲轴、汽轮机的叶⽚等。
3.何谓平⾯机构?何谓机构运动简图?有何⽤途?答:平⾯机构:所有构件都在同⼀个平⾯或平⾏平⾯内运动的机构称为平⾯机构。
机构运动简图:说明机构各构件间相对运动关系的简化图形称为机构运动简图。
⽤途:为了使问题简化,胡洛那些与运动⽆关的构件的外形和运动副的具体构造,禁⽤简单线条和符号来表⽰构件和运动副,并按⽐例定出各运动副的位置。
4.何谓运动副?运动副有哪些类型?各引⼊⼏个约束?⽤什么符号表⽰?答:运动副:这种使两构件直接接触并能产⽣⼀定相对运动的连接称为运动副。
转动副低副:两构件以⾯接触平⾯运动副(引⼊两个约束)移动副⾼副:两构件以点或线的形式接触运动副的类型(引⼊⼀个约束)空间运动副符号表⽰见课本P65.机构构件的组成有那⼏类?它必须具备什么条件?答:构件的组成:固定构件(机架)、原动件(主动件)、从动件△6. 什么是机构的⾃由度?如何计算?机构具有确定运动的条件是什么?答:⾃由度:构件的独⽴运动称为⾃由度H L PP F --=2n 3 构建具有确定运动的条件:F>0且F=原动件数7 . 什么是复合铰链?铰链数和构件数有何关系?什么是局部⾃由度?出现在哪些场合?什么是虚约束?⼀般出现在哪些场合?具体计算机构⾃由度时如何正确去掉局部⾃由度和虚约束?答:复合铰链:两个以上构件同时在⼀处⽤转动副相连接构成复合铰链。
机械设计基础A各章思考题要点
第0章 绪论思考题:1、 试说明机械、机器与机构的特征、区别和联系。
机器:①人为的实物组合体(不是天然形成的);②各实体之间必须具有确定的相对运动;③能实现能量的转换,而且必须有机械能参与。
机构: (有机器的①②两特征)机器和机构的区别:机器能作有用功,而机构不能,机构仅能传递和变化运动,以实现预期的机械运动。
机器和机构的联系:机构是机器的运动部分,机器是由几个机构组成的系统,最简单的机器只有一个机构。
机械: (机械就是机器,但两者在用法上不同)机器常用来指一个具体的概念;机械常用在更广泛、更抽象的意义上。
第1章 平面机构的自由度思考题:1、什么是机构的自由度?什么是运动副?它起的作用是什么?机构的自由度=机构的独立运动数目运动副——两个构件通过直接接触所形成的可产生相对运动的联接。
传递构件之间的运动和动力。
2、 平面副是如何分类的?各类运动副的作用有什么不同?3、 什么是构件、运动链和机构?构件——运动的单元;运动链——两个以上的构件通过运动副相连的构件组。
机构的组成:构件间用运动副相连;构件中有机架、原动件、从动件。
4、 什么是机构运动简图?它与机构的示意图有什么不同?机构运动简图——用规定的符号表示运动副,用简单的线条表示构件,不考虑构件的真实外形,选取合适的比例尺和投影面,来表示机构中各构件相对运动关系的几何图形。
机构运动简图必须按比例绘制,机构示意图则不需要按比例绘制。
5、平面机构自由度计算时应注意哪几方面的问题?各是如何定义的?1)复合铰链——三个或三个以上的构件重叠在一起形成的转动副。
复合铰链的转动副数=组成复合铰链的构件数-12)局部自由度——与整个机构的运动无关的自由度。
3)虚约束——对机构的运动不起实际约束效果的约束。
6、如何根据自由度计算的结果(F≤0或F >0)判断给定机构能否运动和有无确定的相对运动? 平面运动副转动副移动副滚滑副 低副 高副若机构自由度F≤0,则机构不能动;若F>0且与原动件数相等,则机构各构件间的相对运动是确定的。
哈工大机械原理考研-第2章 复习思考题与习题
2.4 复习思考题与习题一、思考题1. 平面四杆机构的基本型式是什么?它有哪几种演化方法?2. 铰链四杆机构的曲柄存在条件是什么?曲柄滑块机构及导杆机构等其它四杆机构的曲柄存在条件是什么?3. 什么是连杆机构的压力角、传动角、急回运动、极位夹角、行程速比系数?连杆机构最小传动角出现在什么位置?如何计算连杆机构的最小传动角?极位夹角与行程速比系数的关系如何?“死点”在什么情况下出现?如何利用和避免“死点”位置?4. 机构运动分析包括哪些内容?对机构进行运动分析的目的是什么?什么叫速度瞬心?相对速度瞬心和绝对速度瞬心有什么区别?如何确定机构中速度瞬心的数目?什么是“三心定理”?对机构进行运动分析时,速度瞬心法的优点及局限是什么?5. 什么是Ⅰ级机构、RRR 杆组、RRP 杆组、RPR 杆组、PRP 杆组、RPP 杆组?什么是相对运动图解法及杆组法?用杆组法对连杆机构进行运动分析的依据及基本思路是什么?6. 何谓摩擦角和摩擦圆?移动副中总反力是如何决定的?何谓当量摩擦系数和当量摩擦角?机械效率的计算方法有哪些?从机械效率的观点来看,机械的自锁条件是什么?7. 平面连杆机构设计的基本问题有哪些? “函数机构”、“轨迹机构”、“导引机构”的设计思想、方法是什么?按给定行程速比系数设计四杆机构的方法是什么?二、习题题2-1 如题2-1图所示导杆机构中,已知mm L AB 400=,偏距mm e 10=。
试问:1. 试判定机构是否具有急回特性,并说明理由。
2. 若滑块的工作行程方向朝右,试从急回特性和压力角两个方面判定图示曲柄的转向是否正确?并说明理由。
题2-2图题2-3 如题图2-3所示曲柄滑块机构:1.设曲柄为主动件,滑块朝右运动 为工作行程。
试确定曲柄的合理转向, 并简述其理由;2.若滑块为主动件,试用作图法确定该机构的死点位置; 题2-3 3.当曲柄为主动件时,画出极位夹角θ,最小传动角min γ。
题2-4 如题2-4 图所示齿轮-连杆组合机构中,构件3带动齿轮2(行星齿轮)绕固定齿轮1(中心轮)转动,试用速度瞬心图解法求图示位置构件2与4的传动比2424/i ωω=。
从力学角度浅谈平面机构传动角的求解
2022年第8期 第49卷———————————————收稿日期:2021-08-10基金项目:江苏省高等教育教学改革研究课题(2019JSJG532)从力学角度浅谈平面机构传动角的求解高阁(江苏科技大学 机械工程学院,江苏 镇江 212100)摘要:机构传动角γ常用来判断平面机构的传力性能,但现有教材并未直接给出传动角的定义,而需要依赖压力角求解,容易产生歧义性从而造成学生理解和运用的困难。
本文从力学的角度出发解析传动角的实际物理含义,引入有效/无效驱动力的概念,在保证教材传动角原主体定义不变的前提下通过补充说明给出了传动角的准确定义,并基于该途径给出了常用机构的传动角的求法。
在此基础上进一步讨论了最小传动角的求解。
通过若干实例表明该定义方式简单明了、具有唯一性,更加容易被学生接受及使用,完善了机械设计教材中的相应基本概念。
关键词:传动角;压力角;力学中图分类号:TH111 文献标志码:Adoi :10.3969/j.issn.1006-0316.2022.08.002文章编号:1006-0316 (2022) 08-0006-07On the Solution of the Transmission Angle of the Plane Mechanism fromthe Perspective of MechanicsGAO Ge( School of Mechanical Engineering, Jiangsu University of Science and Technology,Zhenjiang 212100, China )Abstract :The transmission angle γ is often used to judge the force transmission performance of planar mechanism. However, the definition of transmission angle is not given directly in the existing teaching materials. It depends on the solution of pressure angle, which produces ambiguity and makes it difficult for students to understand and use. This article aims at analyzing the actual physical meaning of the transmission angle from the perspective of mechanics. By introducing the concept of valid/invalid driving force, it gives the accurate definition of the transmission angle through supplementary explanations without changing the original definition in the teaching materials. Transmission angles of commonly used mechanisms are found through the new approach, which is simple and clear to ensure the uniqueness. What is more, how to find the solution of the minimum transmission angle via the new way is further discussed. Several examples verify that the definition is simple, clear and unique, which is easily accepted and used by students. It can help improve the corresponding basic concept in the mechanical design textbook.Key words :transmission angle ;pressure angle ;mechanics压力角和传动角是机械设计中的重要参数,它们直接影响机械传动效率和是否发生自锁。
机械设计基础公式汇总

机械设计基础公式汇总机械设计基础公式大家了解吗?以下是XX为大家整理好的机械设计基础公式汇总,一起来学习吧.零件:独立的制造单元构件:独立的运动单元体机构:用来传递运动和力的、有一个构件为机架的、用构件间能够相对运动的连接方式组成的构件系统机器:是执行机械运动的装置,用来变换或传递能量、物料、信息机械:机器和机构的总称机构运动简图:用简单的线条和符号来代表构件和运动副,并按一定比例确定各运动副的相对位置,这种表示机构中各构件间相对运动关系的简单图形称为机构运动简图运动副:由两个构件直接接触而组成的可动的连接运动副元素:把两构件上能够参加接触而构成的运动副表面运动副的自由度和约束数的关系f=6-s运动链:构件通过运动副的连接而构成的可相对运动系统高副:两构件通过点线接触而构成的运动副低副:两构件通过面接触而构成的运动副平面运动副的最大约束数为2,最小约束数为1;引入一个约束的运动副为高副,引入两个约束的运动副为平面低副平面自由度计算公式:F=3n-2PL-PH机构可动的条件:机构的自由度大于零机构具有确定运动的条件:机构的原动件的数目应等于机构的自由度数目虚约束:对机构不起限制作用的约束局部自由度:与输出机构运动无关的自由度复合铰链:两个以上构件同时在一处用转动副相连接速度瞬心:互作平面相对运动的两构件上瞬时速度相等的重合点。
若绝对速度为零,则该瞬心称为绝对瞬心相对速度瞬心与绝对速度瞬心的相同点:互作平面相对运动的两构件上瞬时相对速度为零的点;不同点:后者绝对速度为零,前者不是三心定理:三个彼此作平面运动的构件的三个瞬心必位于同一直线上机构的瞬心数:N=K(K-1)/2机械自锁:有些机械中,有些机械按其结构情况分析是可以运动的,但由于摩擦的存在却会出现无论如何增大驱动力也无法使其运动曲柄:作整周定轴回转的构件;连杆:作平面运动的构件;摇杆:作定轴摆动的构件;连架杆:与机架相联的构件;周转副:能作360?相对回转的运动副摆转副:只能作有限角度摆动的运动副。
机械原理题目——四杆机构的设计

1、如图示的铰链四杆机构中,AD 为机架,AB a ==35 mm ,CD c ==50 mm ,30==d AD mm ,问BC b =在什么范围内该机构为双摇杆机构;该机构是否有可能成为双曲柄机构?2、试画出图示机构的传动角γ和压力角α,并判断哪些机构在图示位置正处于“死点”?(1) (2)(3) (4)3、已知铰链四杆机构机架长度30=AD l mm ;其它两个连架杆长度分别为20=AB l mm ;40=CD l mm ,问:(1)其连杆BC 的长度须满足什么条件才能使该四杆机构为曲柄摇杆机构;(2)按上述各杆长度并选35=BC l mm ,用适当比例尺画出该机构可能出现最小传动角的位置,并在图上标出γmin 。
4、如图示曲柄滑块机构的运动简图,试确定当曲柄1等速转动时:(1)机构的行程速度变化系数K 。
(2)最小传动角min γ的大小。
(3)滑块3往复运动时向左的平均速度大还是向右的平均速度大。
(4)当滑块3为主动时,机构是否出现死点,为什么? (用作图法求解)5、在图示铰链四杆机构中,已知各构件的长度25=AB l mm ,55=BC l mm ,40=CD l mm , 50=AD l mm 。
(1)问该机构是否有曲柄,如有,指明哪个构件是曲柄;(2)该机构是否有摇杆,如有,用作图法求出摇杆的摆角范围;(3)以AB 杆为主动件时,该机构有无急回性?用作图法求出其极位夹角θ,并计算行程速度变化系数K ; (4)以AB 杆为主动件,确定机构的αmax 和γmin 。
.6、图示为开关的分合闸机构。
已知150=AB l mm ,200=BC l mm ,200=CD l mm , 400=AD l mm 。
试回答:(1)该机构属于何种类型的机构;(2)AB 为主动件时,标出机构在虚线位置时的压力角α 和传动角γ;(3)分析机构在实线位置(合闸)时,在触头接合力Q 作用下机构会不会打开,为什么?7、试设计一曲柄摇杆机构。
压力角,传动角,死点
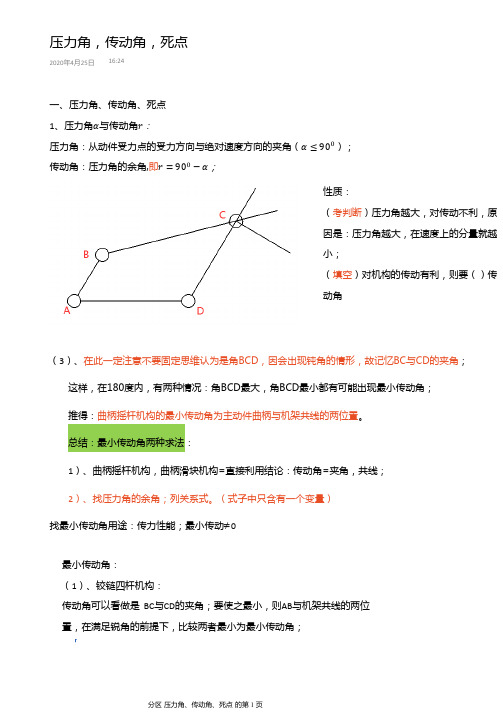
一、压力角、传动角、死点1、压力角 与传动角压力角 从动件受力点的受力方向与绝对速度方向的夹角( );传动角 压力角的余角,即 ;性质(考判断)压力角越大,对传动不利,原因是 压力角越大,在速度上的分量就越小;(填空)对机构的传动有利,则要()传动角最小传动角(1)、铰链四杆机构传动角可以看做是 BC 与CD 的夹角;要使之最小,则AB 与机架共线的两位置,在满足锐角的前提下,比较两者最小为最小传动角;这样,在180度内,有两种情况 角BCD 最大,角BCD 最小都有可能出现最小传动角;推得 曲柄摇杆机构的最小传动角为主动件曲柄与机架共线的两位置。
总结 最小传动角两种求法1)、曲柄摇杆机构,曲柄滑块机构=直接利用结论 传动角=夹角,共线;2)、找压力角的余角;列关系式。
(式子中只含有一个变量)(3)、在此一定注意不要固定思维认为是角BCD ,因会出现钝角的情形,故记忆BC 与CD 的夹角;找最小传动角用途 传力性能;最小传动 0压力角,传动角,死点2020年4月25日16:24曲柄摇杆机构的演化知 滑块与导路的移动副可以看做是转动中心D 垂直导路无穷远处的转动副;1)、根据演化原理,按照曲柄摇杆机构2)、几何关系 曲柄与滑块的移动方向垂直时。
(武汉科技大学)且偏置曲柄滑块,AB 在偏距之上时的角C 最小。
(2)、曲柄滑块机构摆动导杆机构的压力角始终是0;(因速度方向与受力方向重合),传动角是90度。
(武汉科技大学)(3)、摆动导杆机构(对心) 偏置等你在做题遇到时给你讲解,偏置导杆不一样,有些东西自己做题时触类旁通就可以。
死点(1)谁是主动件,离开主动件谈死点无意义;例如 同样的曲柄摇杆机构,曲柄为主动件时无死点,摇杆为主动件时有死点;定义 当机构处于死点位置时,主动件通过连杆作用于从动件上的力恰好通过其回转中心,而不能使从动件转动,出现顶死现象。
(考简答,与自锁区别)方法 从动件的传动角分析,死点时,传动角为0,压力角为90度且无转动力矩;(2)分析……`问 四杆机构存在死点取决于()与连杆共线;考点如(西电2014) 平面四杆机构中,是否存在死点,取决于连架杆是否与连杆共线(1)判断题(故意不说谁是原动件)因死点就是从动件的传动角为0且力过转动中心(无转动力矩);故若最小传动角不为0,即无死点;常见 曲柄摇杆机构,摇杆主动;曲柄滑块(对心,偏心),滑块主动;双曲柄无死点(考选择)思考 对心曲柄滑块有无极位夹角?下节课讲;(2)死点的判断(3)死点与自锁的区别 简答题(自锁是由摩擦作用,使得驱动力无论多大,都使得机构无法运动的现象,自锁具有方向性;死点是从动件的传动角为0;)(4)克服死点的方法飞轮惯性 缝纫机机构错列 火车车轮机构(5)死点应用原理 利用死点传递的力通过转矩中心出现顶死的特性,进行夹紧等工作。
机械设计基础习题集(附解答)
目录绪论 (1)平面机构的自由度 (3)平面连杆机构 (8)凸轮机构 (14)齿轮机构 (18)轮系 (23)机械零件设计概论 (28)联接 (30)齿轮传动 (41)蜗杆传动 (51)带、链传动 (60)轴 (69)滑动轴承 (75)滚动轴承 (78)联轴器和离合器 (91)绪论1. 简述机构与机器的异同及其相互关系。
2. 简述机械的基本含义。
3. 简述构件和零件的区别与联系。
4. 简述“机械运动”的基本含义。
5. 简述“机械设计基础”课程的主要研究对象和内容。
6. 简述“机械设计基础”课程在专业学习中的性质。
【参考答案】1. 共同点:①人为的实物组合体;②各组成部分之间具有确定的相对运动;不同点:机器的主要功能是做有用功、变换能量或传递能量、物料、信息等;机构的主要功能是传递运动和力、或变换运动形式。
相互关系:机器一般由一个或若干个机构组合而成。
2. 从结构和运动的角度看,机构和机器是相同的,一般统称为机械。
3. 构件是机械中的运动单元,零件是机械中的制造单元;构件是由一个或若干个零件刚性组合而成。
4. 所谓“机械运动”是指宏观的、有确定规律的刚体运动。
5. 研究对象:常用机构(平面连杆机构、凸轮机构、齿轮机构等)和通用零(部)件(螺栓、键、齿轮、带、链、轴、轴承、联轴器、离合器等)。
研究内容:机构的组成及其工作原理、结构分析、运动分析等;零(部)件结构、设计计算、类型选择、使用维护等。
6. “机械设计基础”课程着重研究各类机械中的共性问题,为进一步深入研究各种专门机械奠定基础;同时,“机械设计基础”课程的学习又涉及到高等数学、机械制图、工程力学、工程材料以及机械制造基础等知识的综合运用。
因此,“机械设计基础”是课程体系中的一门专业技术基础课程。
平面机构的自由度1. 什么是机构中的原动件、从动件、输出构件和机架?2. 机构中的运动副具有哪些必要条件?3. 运动副是如何进行分类的?4. 平面低副有哪两种类型?5. 简述机构运动简图的主要作用,它能表示出原机构哪些方面的特征?6. 机构自由度的定义是什么?一个平面自由构件的自由度为多少?7. 平面运动副中,低副和高副各引入几个约束?8. 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?9. 运动链和机构关系如何?10. 画出下列机构的示意图,并计算其自由度。
§8—3平面四杆机构的基本知识

四、死点位置(Dead
Point Position)
1、概念: 、概念: 图8-30所示的曲柄摇杆机构中,以摇杆3为原动件, 而曲柄1为从动件。 当摇杆摆到极限位置CD1 和CD2时,连杆2与从动曲柄 1共线(重迭和拉直),这时 主动件CD通过连杆作用于从 动曲柄AB上的力恰好通过回
图8-30
转中心A,此力对A点不产生力矩,所以不能使曲柄AB转 动而出现“顶死”现象,机构的这种位置称为死点位置 死点位置。 死点位置 此时机构的传动角γ=0°。
令摇杆自CD1摆到CD2为工作行程(正行程),则摆 动速度慢;摇杆自CD2摆回到CD1为空回行程(反行程), 则摆动速度快。 我们把摇杆在正反行程中这种速度不等的运动性质称 为急回运动 急回运动。 急回运动 牛头刨床、往复式输送机等机械就利用了这种急回特 性来缩短非生产时间,从而提高生产率。
机构的急回运动程度可用反正行程速度变化系数(简 称行程速比系数)K表示。 K= v2 / v1= t1 / t2=α1 /α2 =(180°+θ)/(180°-θ) 讨论: 讨论 ① v2↑ K=1 ②θ= 0° θ> 0° θ↑ 急回运动程度↑(越强) K↑ 无急回运动 ∴要使机构有急回运动,必须K>1; K=1(无急回运动) K>1(有急回运动) K↑ 急回运动程度↑(越强)
最小传动角γ 出现的位置: 最小传动角 min出现的位置: 1)曲柄摇杆机构 ) ①曲柄为原动件时: (连BD) △BCD中:BD2 = b2+c2 -2bccos∠BCD
图6-29 6 29
△ABD中: BD2 = a2+d2 -2adcosψ ∴ cos∠BCD = (b2+c2 -a2 - d2+2adcosψ) / 2bc 当cosψ= +1(即ψ= 0°,AB与AD重迭共线,即AB1 C1D位置)时: cos∠BCD最大 ∠BCD最小 γ1min=∠BCD
四杆机构习题答案ppt课件

E B1 Ⅰ
A C1 B2
Ⅱ C2
课后作业:8-23~8-28
D
ppt课件
24
2 设计检验
(1 )炉门闭启时是否与炉 外壁干涉
从位置Ⅰ到位置Ⅱ是炉门 开启的过程。检验E点是否 与炉外壁干涉。
P24
E
P12 B1
VE
1
A P14
Ⅰ 2 C1 P23
)
a 240mm,
解:1 ) a杆为最短杆,C杆为最长杆时 b 600mm
a c b d 满足曲柄存在条件
c 400mm,
c b d a 600 500 240 860mm d 500mm.
2) 假设C杆为最短杆,则有:
b
2
c b>a d 不满足曲柄存在条件 B
B
得出: C
ppt课件
11
3)在图上标出极位夹角θ,;最小传动角γmin ;
比较 m in 、 min 取小值。
C
B
C
m in
A
B
B
min
D
ppt课件
12
例5 假设图示导杆机构各部尺寸为已知,求:
n
1 . 该机构曲柄存在的条件;
2 . 图示位置机构的压力角和传动角;
已知和LAB和LAD (在图中已按比例画出),试用作图法确定 铰链C 的位置。要求注明四杆机构ABCD。
E
B1
C
A
B1
E1
E1 E2
D
A
B2
ppt课件
D
29
摇杆CD在第二位置为极限位置
铰链四杆机构基本性质
死点影响
机构处于死点位置时,无论驱动力多大 ,都不能使从动件转动。因此,死点位 置对机构的传动性能有不利影响。
压力角与传动角
01
压力角定义
压力角α是从动件的受力方向与力作用点的速度方向之间所夹的锐角。
压力角越大,机构的传动性能越差。
02
传动角定义
传动角γ是压力角的余角,即γ=90°-α。传动角越大,机构的传动性能
铰链四杆机构的速度分析是研 究机构在运动过程中各点速度 的变化规律。
通过速度分析,可以了解机构 在不同位置时的速度分布和变 化规律,为机构的动态设计和 优化提供依据。
速度分析需要考虑机构的几何 特性和运动学特性,采用适当 的方法进行计算和分析。
加速度分析
01
铰链四杆机构的加速度分析是研究机构在运动过程中各点加速 度的变化规律。
铰链四杆机构的运动分析
REPORTING
WENKU DESIGN
位置分析
铰链四杆机构的位置分析是研究 机构在不同位置时的形态和尺寸
关系。
通过位置分析,可以确定机构在 不同位置时的杆长、角度等参数,
进而了解机构的运动特性。
位置分析是铰链四杆机构设计和 分析的基础,对于优化机构性能
具有重要意义。
速度分析
铰链四杆机构基本性 质
https://
REPORTING
• 铰链四杆机构概述 • 铰链四杆机构的基本性质 • 铰链四杆机构的演化形式 • 铰链四杆机构的设计方法 • 铰链四杆机构的运动分析 • 铰链四杆机构的优化与应用拓展
目录
PART 01
铰链四杆机构概述
REPORTING
应用领域
铰链四杆机构被广泛应用于各种传动装置、操纵机构和执行机构中,如汽车转向器、工程 机械的变幅机构、飞机起落架收放机构等。
第二章 曲柄摇杆机构、四杆机构设计解读

定块机构
导杆机构
摇块机构
1 4 3
v3
1r1 22 r2 1 2r2 2 r1
一、曲柄摇杆机构
在铰链四杆机构中,若两个连架杆,一为曲 柄,另一个为摇杆,则此铰链四杆机构称为曲柄 摇杆机构。 通常曲柄1为原动件,并作匀速转动;而 摇杆3为从动件,作变速往复摆动。
曲柄摇杆机构的主要特性: 1.急回运动
曲柄摇杆机构中,曲柄AB在转动一周中,在B1、 B2两次与连杆BC共线,相应铰链中心 A与C之间的 距离AC1和AC2分别为最短和最长,摇杆CD的位置 C1D和C2D分别为其左右极限位置。摇杆在两极限 位置间的夹角ψ, 称为摇杆的摆角。 当曲柄由位置 AB1 顺时针转到位 置AB2 时,曲柄转 角 1 =180°+θ,
二、给定行程速度变化系数K设计四杆机构 曲柄摇杆机构 已知条件:摇杆长度l3,摆角ψ,行程速度变化 系数K。 设计的实质是确 定铰链中心A点的位 置和其他三杆的尺寸 l1 、 l2 和 l4 。 设计步骤:
K 1 (1) 按公式 θ 180 计算出极位夹角θ。 K 1
(2) 任选固定铰链中心D的位置,由摇杆长度
急回运动特性可用行程速度变化系数(也称 行程速比系数)K 表示。 1 v2 C1C2/t2 t1 180°+θ
K=──=────=──=──=───── (2-1) 2 v1 C1C2/t1 t2 180°-θ
θ ──摇杆处于两极限
位置时,对应的曲 柄所夹的锐角,称 为极位夹角。 K 值越大,急回 特性愈明显。一般机 械中,1≤K≤2。
(1) 整转副是由最短杆与其邻边组成的; (2) 最短杆与最长杆长度之和,应小于或等于 其余两杆长度之和。
这两个条件必须同时满足,否则机构中不存 在整转副,无论取哪个构件作机架都只能得到双 摇杆机构。
四杆机构的基本特性和设计
E
θ
φ 设计:潘存云
C1 90°-θ
②任取一点D,作等腰三角形
腰长为CD,夹角为φ;
A
θD
③作C2P⊥C1C2,作C1P使
∠C2C1P=90°-θ,交于P;
P
④作△P C1C2的外接圆,则A点必在此圆上。
⑤选定A,设曲柄为l1 ,连杆为l2 ,则:
A C1= l1+l2 ,A C2=l2- l1 => l1 =( A C1-A C2)/ 2
⑥以A为圆心,A C2为半径作弧交于E,得: l1 =EC1/ 2 l2 = A C1-EC1/ 2
2) 曲柄滑块机构 已知K,滑块行程H,偏
H C1 90°-θ C2
距e,设计此机构 。
A
90°-θ
e
E 设计:潘存云
①计算:
2θ
θ=180°(K-1)/(K+1);
o
②作C1 C2 =H
③作射线C1O 使∠C2C1O=90°-θ, 作射线C2O使∠C1C2 O=90°-θ。
A
B1
C C1 DD
B2
当曲柄以ω逆时针转过180°+θ时,摇杆从C1D位置 摆到C2D。 所花时间为t1 , 平均速度为V1,那么有:
t1 (180 ) / V1 C1C2 t1 C1C2 /(180 )
当曲柄以ω继续转过180°-θ时,摇杆从C2D,置摆到
C1D,所花时间为t2 ,平均速度为V2 ,那么有:
2023最 新 整 理 收 集 do
something
§6.3
平面机构的基本特性
1.曲柄存在条件Βιβλιοθήκη 2.急回运动特性 3.压力角和传动角 4.死点位置
§8—3平面四杆机构的基本知识

Ft=Fcosα(=Fsinγ) Fn=Fsinα(=Fcosγ) 压力角α:作用在输出构件(从动件)上点C的力F的方向 与该点绝对速度方向之间所夹的锐角。 2、传动角(Transmission Angle) 、 传动角γ:压力角α的余角,亦 即连杆BC与CD所夹的锐角。 即 γ= 90°-α γ可在机构运动简图中直接观察: 当∠BCD为锐角时:γ=∠BCD; 当∠BCD为钝角时:γ=180°-∠BCD。 传动角γ的大小及变化情况可反映机构传动性能的好 坏。γ越大越好,α越小越好。
▲ 死点出现的位置:出现在机构的两个极限位置。 死点出现的位置: 1)曲柄摇杆机构:出现在以摇杆为原动件,连杆与从动 共线的两位置; 曲柄共线 共线 2)曲柄滑块机构:出现在以滑块为原动件,连杆与从动 共线的两位置; 曲柄共线 共线 3)摆动导杆机构:出现在以导杆为原动件,导杆与从动 曲柄垂直 垂直的两位置。 垂直 ▲ 结论:只要机构中有往复运动的构件,并且以此往复 运动的构件为原动件,则机构一定存在死点, 且死点位置是机构的极限位置。
当cosψ= +1时: γ1min=∠BCD 当cosψ= -1(即ψ=180°, AB与AD拉直共线,即AB2C2D位置)时: γ2min=180°-∠BCD cos∠BCD最小 ∠BCD最大 ∴ γmin取γ1 min、γ2 min两者中的小值。 ∴γmin所处位置:出现在曲柄与机架共线时的两个位置之一。 ②摇杆为原动件: γmin= 0° ,出现在从动曲柄与连杆共 线的两个位置。
1)CD为最短杆:LCD+80>40+50 ∴ LCD>10 10< LCD<70 2)CD为中间长杆:40+80>50+LCD ∴ LCD<70 3) CD为最长杆:40+ LCD>80+50 ∴ LCD>90 90< LCD<170 但CD最长也不得超过40+80+50=170,即LCD<170 综合:当10< LCD<170时,得到双摇杆机构。