控制器接口定义(普通车)
电动车控制器接线图

电动车控制器接线图说明大全下图所示为高标科技动控制器接线图:一、高标科技电动车控制器接线说明:1.电源输入:粗红色线为电源正端,黑色线为电源负端,细橙色线为电门锁。
2.电机相位(u、v、w输出):粗黄色线为U,粗绿色线为V ,粗蓝色线为W。
3.转把信号输入:细红色线为+5V电源,细绿色为手柄信号输入,细黑色线为接地线。
4.电机霍耳(A、B、C输入):细红色线为+5V电源,细黑色线为接地线。
细黄色线为A,细绿色线为B,细蓝色线为C。
5.刹车(柔性EABS+机械刹):细黄色线为柔性EABS,细蓝色线为机械刹(高电平刹车:+12V),细黑色线为接地线(低电平刹车)。
6.传感器: 细红色线为+5V电源,细黑色线为接地线, 细绿色线为传感器信号输入。
7.仪表(转速):细紫色线8.巡航:细棕色线9.限速:细灰色线10.自动识别开关线:细黄色线高标科技电动车控制器如何接线:1.分清楚每根线的作用,给控制供电的电源线(一般三根线用一个朔料插销弄在一起,其中最粗的两根是给控制器供电的、红+级、黑的-级,还一根细的红色的是电源锁线)2.转把(控制速度的),一般是三根细线、红、蓝、黑。
也是用朔料插销弄在一起的。
3.仪表线、速度线、刹车断电线。
一般仪表线和刹车断电线也是在一起的。
4.还有两个线,它们可以互相连接在一起的,那可以调节角度。
(60度和120度)5.三跟主相线,5跟细的(和电机里面霍尔连接的)高标科技电动车控制器接线时须知:1.注意好正负极。
2.需要调试不可能一次成功的,但也切记不要随便乱接。
3.需要根据经验找到,先排除其他的线的作用。
一般最后调试不出来,就可以考虑是电机和控制器角度问题了。
5.电动车控制器和电机有严格的匹配关系,需要慢慢调试。
6. 电动车控制器和电机就算型号一样(假如都是48V300W)也是有可能装上去没有作用的,主要原因可能是电机霍尔不匹配。
控制器的通信接口说明书

控制器的通信接口说明书一、概述本文档旨在详细介绍控制器的通信接口,包括接口类型、接口参数和接口使用方法等。
控制器是一种重要的自动控制设备,主要用于工业自动化、家居自动化、机器人控制等领域。
通信接口是控制器与其他设备进行数据交换的重要途径之一,因此,掌握控制器通信接口的使用方法非常必要。
二、接口类型控制器的通信接口类型有多种,主要包括以下几种:1.串口接口串口接口是控制器最常用的通信接口之一,它具有通信距离短、速度快、可靠性高等特点。
常见的串口接口有RS232、RS485、TTL等。
其中,RS485接口是工业自动化领域中使用最广泛的一种串口接口,它支持多点连接,可以同时与多个设备进行通信。
2.以太网接口以太网接口是控制器现代化的通信接口之一,它具有通信速度快、连接距离远、传输数据量大等特点。
以太网接口通常采用TCP/IP协议进行数据传输,可以同时与多个设备进行通信。
3.无线接口无线接口是控制器近年来广泛采用的通信接口之一,它具有无线连接、方便布线、适用于移动设备等特点。
常见的无线接口有蓝牙、WIFI、Zigbee、LoRa等。
其中,蓝牙接口适用于短距离通信,WIFI接口适用于室内大范围通信,Zigbee接口适用于低功耗设备通信,LoRa 接口适用于远距离通信。
三、接口参数控制器的通信接口参数是使用接口时需要注意的重要事项之一,包括接口类型、波特率、数据位数、校验位和停止位等,这些参数的设置直接影响到接口的通信效果。
下面以RS485接口为例介绍常见的接口参数设置方法:1.波特率波特率是指每秒钟传输的比特数,它是RS485接口常见的一个重要参数。
常见的波特率有2400bps、4800bps、9600bps、19200bps、38400bps等。
波特率的设置应该根据实际情况来确定,一般在使用过程中可以逐步增加,直至数据传输速度达到最佳状态。
2.数据位数数据位数是指每个数据字节中的二进制位数,常见的数据位数为7位或8位,一般默认为8位。
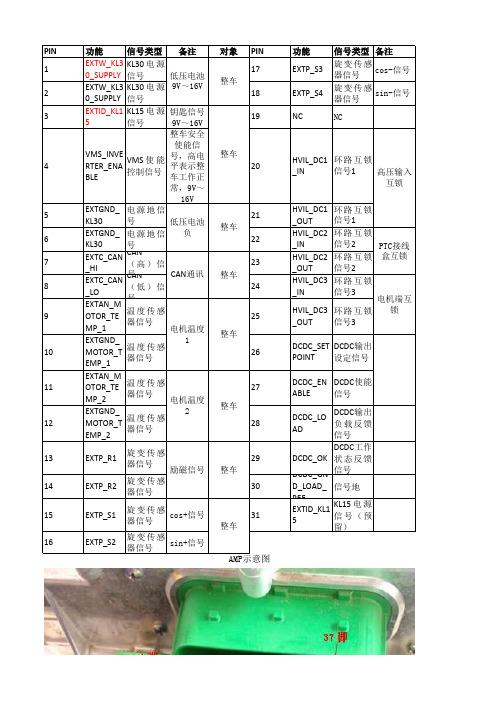
S15接口定义
21 整车 22 23 整车 24 25 15 16
29 励磁信号 整车 30 31 整车
AMP示意图
对象 整车 整车
整车
整车
MCU
钥匙信号 9V~16V 整车安全 使能信 号,高电 VMS 使 能 平表示整 控制信号 车工作正 常,9V~ 16V 电源地信 号 低压电池 负 电源地信 号 CAN (高)信 CAN通讯 号 CAN (低)信 号 温度传感 器信号 电机温度 1 温度传感 器信号 温度传感 器信号 温度传感 器信号 旋变传感 器信号 旋变传感 器信号 旋变传感 cos+信号 器信号 旋变传感 sin+信号 器信号
信号类型 KL30 电 源 信号 KL30 电 源 信号 KL15 电 源 信号
备注 低压电池 9V~16V
对象 整车
PIN 17 18 19
功能 EXTP_S3 EXTP_S4 NC
信号类型 备注 旋变传感 cos-信号 器信号 旋变传感 sin-信号 器信号 NC
整车 20
HVIL_DC1 环 路 互 锁 信号1 _IN 高压输入 互锁 环路互锁 信号1 环路互锁 信号2 PTC接线 环 路 互 锁 盒互锁 信号2 环路互锁 信号3 电机端互 锁 HVIL_DC3 环 路 互 锁 信号3 _OUT HVIL_DC1 _OUT HVIL_DC2 _IN HVIL_DC2 _OUT HVIL_DC3 _IN DCDC_SET DCDC 输出 POINT 设定信号 DCDC_EN DCDC 使能 ABLE 信号 DCDC 输出 DCDC_LO 负载反馈 AD 信号 DCDC 工作 DCDC_OK 状 态 反 馈 信号 DCDC_GN 信号地 D_LOAD_ REF KL15 电 源 EXTID_KL1 信号(预 5 留)
电动车控制器接线图

2009-03-31 02:59 P.M.1.如何判断电动车电机是60°或者是120°?
拔掉(断开)霍尔插头,然后开电门锁。慢拧转把,电机有动静表示电机60°。若一点动静也没有就是120° 。
中间是正的????就是想垄断售后啊,这样的话就没有通用性了。
20.48V500W无刷电摩,转速变慢,换了两个转把也是一样,直接短接转把正5V与信号线,速度则正常,是不是控制器出现问题了呢?以前遇到过此种故障,拔开限速线就行了,可这回不知是啥问题?
先把控制器限速拔开试试,不行的话换个新控制器试试,如果换好了,就说明原控制器的转把线路输入电阻变的太大了,已经不好了。把限速线分开包好,可能是限速线碰到水了。
13.今天朋友转来一台车,电机咯噔咯噔响。将其控制器装在其他车上正常仔细检查发现电机转一圈响一下排除机械故障后打开电机发现一块磁钢碎掉(未脱落)一块不完整(厂家填缝的大半块)换掉碎的依旧看来只有换无霍尔控制器了。
做工这么差啊,可能是磁场不均匀的问题,霍尔无法准确定位导致。朋友说的对我也遇到和你一样的问题我的是和平电车,电机换过霍尔和控制器以后就和你说的问题一样,我试过好多次也不行。最后也是装一个无霍尔控制器一切正常。
8.如何检测电瓶好坏,如何检测电瓶容量?
直接用电炉丝放电,然后量电压。电压下降不合常理的快的,这个电池就完 了。
9.无刷电机其中有一根绕组线与其他任意一根短路,没有阻力,说明什么,要不要紧?
说明其中一个线已经断了,3根粗线分别接触,都应该有阻力才行,如果其中一根没有阻力,则断了。
几款控制器外接引线插头及说明

以下为几款控制器外接引线插头及说明,插头所标字母及详细功能请对照宝贝描述里面的相关注释。
购买后安装时,请对照以下图片进行引线查对!A组:控制工作电源线:常见多为三根,一根粗黑是主负极,一根粗红是主正极。
还有一根稍微细一点点的是钥匙控制线。
B组线:电机主线包供电驱动线,三根粗线C组线:电机霍尔线,主要负责电机与控制器的信号沟通D组线:转把调速线。
主要负责电机速度的调整E组线:自学习线,又称自识别线。
F组线:刹车线,又称刹车断电线。
G组线附加功能线,多为两根线,通过一个按钮,或者拨动的开关进行对功能的启闭控制,常见的有巡航定速功能,变速提速功能,高中低速循环变档功能,倒车功能等。
具体确切功能以所选择的控制器类型默认功能或买家的要求为准。
H组线脚踏脉冲助力1:1此线主要用在带脚蹬的自行车款电动车,电摩款无法使用。
J组线速度仪表线(非电量或状态)K组线刹车断电线(高电平刹车线),一般使用率较少L组对插线36V48V手动电压选择线M组线:七排线或称松正七排线N组线高中低速显示线。
P组线一款双模控制器的自动巡航选择线无刷控制器只是对功能接而不是对型号接车子型号和控制器型号没有用只要根据自己需要的功能进行选择安装和接线其实很简单请看下面简图下图是常见普通车子的前车头电路!仔细分析可见与控制器无关名称:全智能最强无刷电机控制器(只要是无刷电机电动车就可以用)(注意参数:6管!350W 17A±1A)(350W可以完全代替0-350W之间的控制器)(17A±1A可以完全代替0-17A之间的控制器)(真正决定实际功率和电流取决与电机)(外壳尺寸大概:10.5*7*3.3厘米)(如果算上固定加长的铁片总长13厘米)(默认附属功能:1:1助力,高、低电平刹车、速度仪表、欠压保护、过流保护、堵转保护、防飞车保护,买家在选购过程中如无特别要求添加的功能,一律默认配置发货!谢谢合作!)特别注意:由于电机与控制器的搭配组合效率是共同因素,所以有时候同样一个控制器在不同的电机上速度不可能一摸一样。
柯蒂斯常用控制器端口定义表

前进信号入
10
前进信号
11
后退信号入
11
后退信号
12
空脚
12
空脚
13
电位器高端
13
电位器高端
14
电位器低端
14
电位器低端
15
0-5V输入
15
电位器滑端
16
电位器滑端
16
发光管负极
17
主接触器
17
主接触器
18
前进接触器
18
制动灯输出
19
后退接触器
19
倒车蜂铃器
20
空脚
20
模式开关
21
空脚
21
开关
22
空脚
22
发光管正极
23
空脚
23
防滑接触器出
24
紧急反向出
24
空脚
序号
1297控制器端口定义
序号
1215控制器端口定义
1
钥匙开关
1
钥匙开关
2
互锁
2
互锁
3
模式选择
3
模式开关
4
驱动0-5V信号入
4
空脚
5
电喇叭信号入
5
0-10V
6
紧急反向信号入
6
紧急反向入
7
慢速电磁阀驱动出
7
空脚
8
辅助驱动输出
8
空脚
9
紧急反向信号入
柯蒂斯常用控制器端口定义表
1207控制器
1266控制器
序号
端口定义
序号
端口定义
1
并励场驱动输出
1
陕汽CBCU管脚定义

G2 供电,输出电路和 功 率可自 诊断 唤 醒信号 15A
F07
左 前侧转 向灯
输出/最大电流 3.6A
F08
雨 刮低速 继电器
输出/最大电流 1.0A
ECAS 错误信号
D28
挂车 ABS 信号
D29
ECAS 故障报警
D30
预留
D31
5V 传感器电源
D32
EDC 故障
D33
发 动机停 机信号
D34
菜 单确认 开关
D35
菜 单上翻 页开关
D36
危 机报警 开关
D37
发 动机冷 却液液 面报警 开关
D38
预留
D39
预留
D40
预留
插接件 E
针 脚编号 E01 E02 E03
G1 供电,输出电路和 功 率可自 诊断 G1 供电,输出电路和 功 率可自 诊断 15A G1 供电,输出电路和 功 率可自 诊断 G1 供电,输出电路和 功 率可自 诊断 G1 供电,输出电路和 功 率可自 诊断
传 感器地 线
传 感器地 线
取 力器信 号开关 自 卸车翻 斗回位 信号开 关 制动器气压 1﹑2 报警信号 高 低档开 关 倒 当开关 预留 气压传感器 1 气压传感器 2 油 量传感 器 预留 预留 预留 ICAN_H(至 CMIC) ICAN_H(至 VDR) ICAN_L(至 CMIC) ICAN_L(至 VDR) 传 感器地 线 钥匙开关 50 档(需要与否) 灯光开关位置 1,(小灯) 空 滤器堵 塞信号 开关 预留 进 气加热 工作信 号
技术报告-X121轿车EPS系统方案确定与第一轮控制器接口定义

1 EPS工作原理汽车电动助力转向系统(Electric Power-Assisted Steering或者Electric Power Steering,简称EPAS或者EPS)完全抛弃了液压执行机构,是一种直接依靠电机提供转向助力的动力转向系统。
电动机产生的转矩,经过转向系统传递机构转化后,可以协助驾驶员进行动力转向。
不同车的EPS结构部件不尽相同,但其基本原理是一致的。
EPS一般是由电子控制单元ECU、电动机、电磁离合器、减速机构、扭矩传感器、车速传感器等组成[4],其系统结构如图1-1所示:图1-1 EPS的系统结构驾驶者在操纵方向盘时,给输入轴输入了角位移,输入轴和输出轴之间的角位移使扭杆受扭,扭矩传感器将扭杆所受到的扭矩转化为电压信号输入电控单元;与此同时,车速传感器检测到的车速信号也输入电控单元,电控单元综合方向盘的扭矩、转动方向以及车速等信号,判断系统是否需要助力以及助力的大小和方向。
若需要助力,则依照既定的助力控制策略计算电动机助力转矩的大小并输出相应的控制信号给驱动电路,由驱动电路驱动助力电机,电动机输出扭矩由涡轮蜗杆传动装置放大再施加给转向轴起助力作用,从而完成实时控制助力转向。
若EPS系统出现故障,控制器将立即切断离合器,停止对电机供电,系统不提供助力,避免发生意外。
由于电控单元可以采集车速和方向盘扭矩,所以EPS的助力大小可以根据控制策略做实时调整,这给设计性能优良的助力转向系统提供了可能。
一个好的控制策略可以使驾驶员的作用力大小适当、路感良好,并使转向系统反应快速、阻尼特性好。
现在随着电子技术的发展,高运算速度的DSP芯片使得模糊控制、神经网络等复杂算法在EPS上得以实现,保证了EPS系统助力的实时性,尤其是专门用于电机控制的DSP 芯片的出现,使得对助力电机的控制更加方便,提高了整个电动助力系统的性能。
2 EPS的组成2.1 EPS的构成2.2助力电机的布置方式EPS根据助力电机的布置位置不同,可以分为转向轴助力式(Column Type)、小齿轮助力式(Pinion Type)和齿条助力式(Rack Type)三种型式,如下图所示。
HOWO 车身中央控制单元 【 CBCU 】 针脚 定义

高/低电平信号 高/低电平信号 高/低电平信号 高/低电平信号 信号输入 (频率信号) 信号输入 (频率信号)
A08号供电,输出电路可自诊断 A08号供电,输出电路可自诊断
用于信号屏蔽
低控(对地有效) 低控(对地有效) 低控(对地有效) 低控(对地有效) 低控(对地有效) 低控(对地有效) 低控(对地有效) 输入24伏全车灯光正常,没有24伏电压 输入时全车没有灯光输出。 高控(对电源有效)
高/低电平信号
低控(对地有效) 低控(对地有效) 低控(对地有效)
用于信号屏蔽 电阻式传感器 电阻式传感器 电阻式传感器 电压式传感器 电阻式传感器 电阻式传感器 连接到仪表的第8脚
连接到仪表的第10脚
-
高控(对电源有效) 高控(对电源有效) 高控(对电源有效) 高控(对电源有效) 高控(对电源有效) 高控(对电源有效)
D36.
后雾灯开关 ASR信号 空档开关 仪表CAN线地 模拟量输入1(气压传感器1) 模拟量输入2(气压传感器2) 模拟量输入3(燃油高度传感器) 模拟量输入4 – 发电机D+端子 模拟量输入5 (水温传感器) 模拟量输入6 (机油压力传感器) 信息CAN高 信息CAN高 信息CAN低 信息CAN低 传感器地 危急报警开关 灯光开关位置I (小灯开关) 组合开关雨刮器间歇档 组合开关雨刮器低速档 组合开关雨刮洗涤喷水 雨刮器复位信号 提升桥模式确认信号 取力器到位信号 仪表CAN地 传感器专用电源+5V 喇叭按钮 全轮驱动到位信号 轮间差速锁到位信号 油压低报警信号(EGR发动机) 油水分离报警信号(共轨发动机) ADR信号(ADR车型)
C10.
组合开关位置 5 (左转向灯开关)
C11.
电动车控制器的引线分别是接哪里的?了解它的电路原理你就懂了

电动车控制器的引线分别是接哪里的?了解它的电路原理你就懂了上周我们谈了电动车充电器的电路原理,有位粉丝提出建议想看一下电动车控制器的电路原理SO,今天就来谈一下控制器的电路原理电动车控制器控制器电路板电动车控制器在电动车中的作用电动车控制器的主要作用就是用来控制电动车电机的,需要控制包括电机启动、电机转速、刹车断电等电动车控制器接线图我们可以看到一个电动车控制器上面有非常多的接线,每一个接线都有其作用,它们共同构成了一个完整的电动车控制系统电路原理图分析电路原理图(电路图不是很清晰,需要原版图片的同学可以私信作者“电动车控制器电路”获取)同学们是不是一看到这么大一张电路图就感到无从下手,不知道从哪里开始分析呀其实只要把电路拆开就好了1.控制器电源电路图电动车电池电压多是36V以上,控制器主要核心部件是单片机和各类数字电路芯片以及功率开关MOS管,需要一个较低的电压电源电路78L15和78L05共同构成电源电路,分别给数字电路提供5V和功率MOS管提供15V控制极电压2.电池欠压和过流保护电路电池电压被放电到太低、放电电流过大都将损坏电池电池欠压和过流保护电路电池电压D+经R2和R3并联后与R4串联分压,得到的电压被送入单片机AN1进行ADC电压检测,当电池电压过低时禁止电机转动电机电流回路经R55取样之后被送入运放,一路经运放比较后送入单片机中断实现过流关断;一路经运放放大后送入AN0进行实时电流检测3.转把调速和限速电路转把调速和限速电路转把接口接的是线性霍尔或者电位器,它反馈回来的电压信号被送入AN3检测,计算转把扭转角度,控制电动车速度;限速接口是一个跳线开关,它被短接时R33被接入电路,控制输入AN3的电压4.刹车断电电路电动车在刹车时电机必须断电,否则将造成电能浪费和刹车困难刹车断电电路刹车时,H点被接入一个电压,它经电阻分压后被送入AN4检测确定是否是刹车动作5.无刷电机控制电路电动车无刷电机共有三个线圈,需要6个功率MOS管组成换流器,循序控制MOS管导通才能让电机转起来无刷电机控制示意图MOS管导通需符合循序:AH、BL一组;AH、CL一组;BH、CL 一组;BH、AL一组;CH、AL一组;CH、BL一组电机控制电路RB4,RB3,RB2三个单片机管脚分别是控制换流器上管的PWM 信号RB6,RB5,RB4分别是控制换流器下管的PWM信号74系列数字电路芯片我们可以看到电路中还有4个74系列数字电路芯片它们是干什么用的呢?U4(74HC08D)是一个4路与门,当RC2引脚输出低电平时,PWM将无效U5(74HC04D)是一个反相器,U3(74HC27D)和U2是一个三路与或门,它们三个共同组成由RB1电平控制总开关的PWM输出和禁止MOS同时导通电路MOS管驱动电路数字电路芯片输出的信号并不适合直接导通MOS管,所以需要MOS管驱动电路6.霍尔传感器电路霍尔传感器电路图中的J1接口接的是安装在电机上的霍尔传感器,它用来确定电机转子位置,以控制输出电机驱动PWM信号关注作者,学习更多电子电路知识,感谢您的阅读!。
控制器接口定义(普通车)

控制器接口定义(普通车)
DK—K0021控制器接口定义
几点说明
1、目前提供的电子助力转向器已匹配线束,如量产建议做成整车线束。
2、目前提供的线束上有状态指示灯,可以考虑将此指示灯做在仪表盘上。
3、控制器放置位置要确定好,最好让电机线和传感器线满足直接插接在控制器上。
4、
5、诊断ቤተ መጻሕፍቲ ባይዱ关可以不考虑。
1、 P/S 控制模块
2、 控制耦合器
3、 扭矩传感器
4、 屏蔽线
5、 抑噪器
6、 里程表
7、 蓄电池
8、 点火开关
9、 电机和离合器
主程序中断程序
系统参数表
车身控制器功能(BCM)简述
车身控制器功能(BCM)简述车身控制器功能简述一.室内灯控制室内灯控制:∙任一车门被打开,室内照明将会自动点亮。
∙若IGN=OFF,则关闭所有车门后,室内照明将延时15 秒,之后亮度渐渐变暗,3秒后熄灭。
∙延时期间,若IGN=ON,则室内照明立即熄灭。
∙若在IGN=ON状态下,任一车门被打开,室内照明点亮,则当所有车门关闭时,室内照明将立即熄灭。
二.钥匙照明钥匙照明控制:∙若左前门被打开,且IGN=OFF,则钥匙照明点亮。
∙钥匙照明点亮后,若关闭左前门,钥匙照明将延时8秒后熄灭。
∙延时期间,若IGN=ON,则钥匙照明立即熄灭。
∙若打开左前门时,IGN=ON,钥匙照明立即熄灭。
三.报警提示1.安全带报警安全带警示控制:∙若安全带未系,此时打开IGN开关,BCM发信号给仪表,仪表报警。
∙报警期间,若系上安全带或关闭IGN,则报警立即停止。
2.钥匙报警钥匙未拔警示:∙若IGN=OFF且钥匙未拔,则打开左前门时,蜂鸣器报警,直到上述条件不再满足时为止。
3.未关灯报警未关灯警示控制:∙若钥匙未拔且驻车灯开关打开,则打开左前门时,蜂鸣器报警,直到上述条件不再满足时为止。
四.转向/危险灯控制转向灯控制:∙若IGN=ON,且转向开关拨到左转位,则前左转向灯和后左转向灯,左侧转向灯同时闪亮,周期为360msON/360msOFF,直到上述条件不再满足时为止。
∙若IGN=ON,且转向开关拨到右转位,则前右转向灯和后右转向灯,左侧转向灯同时闪亮,周期为360msON/360msOFF,直到上述条件不再满足时为止。
∙若以上转向灯有故障,在转向的时候同侧其他转向灯闪烁频率加倍。
危险灯和指示控制:∙若打开危险开关,则前左转向灯、前右转向灯、后左转向灯、后右转向灯、左侧转向灯和右侧转向灯同时闪亮,周期为360msON/360msOFF,直到关闭危险开关时为止。
∙若以上转向灯有故障,在按下危险开关后,其他转向灯闪烁频率加倍。
五.电动车窗控制前后电动窗控制:∙只有当ACC=ON且IGN=ON时,或在点火钥匙从ON打到OFF后的一分钟时间内电动车窗控制才被允许,否则电动车窗控制被禁止。
高标黑金刚控制器接口定义

高标黑金刚控制器接口定义
《高标黑金刚控制器接口定义》定义了高标黑金刚控制器的接口功能,接口格式和协议,以及如何实现与其他设备的数据交换.这份文档用于定义和标准化控制器与外部设备之间的接口。
文档包括以下几个方面:
1. 概述:介绍高标黑金刚控制器的基本功能,接口格式和协议的定义。
2. 接口参数:定义接口参数,如接口类型、接口速率、接口传输格式等。
3. 接口定义:定义接口的功能和协议,包括控制器与外部设备的数据交换、控制器的参数设置、数据查询和控制功能等。
4. 应用示例:为了更好地理解接口功能,本文档还提供了一些接口应用示例,以便用户可以更直观地了解接口的使用方法。
瑞虎8plus域控制器接口定义
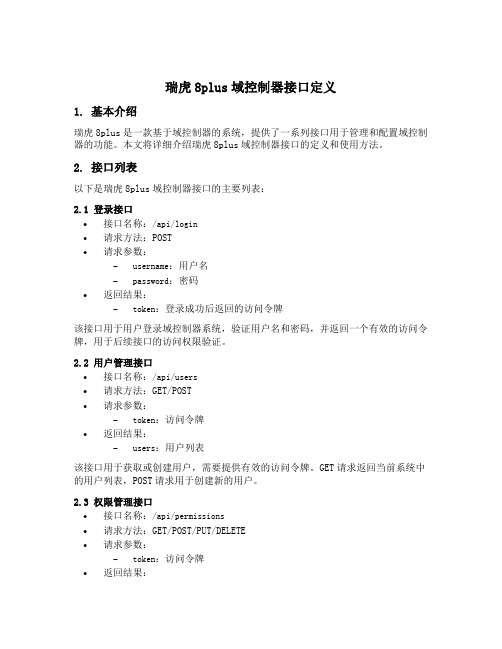
瑞虎8plus域控制器接口定义1. 基本介绍瑞虎8plus是一款基于域控制器的系统,提供了一系列接口用于管理和配置域控制器的功能。
本文将详细介绍瑞虎8plus域控制器接口的定义和使用方法。
2. 接口列表以下是瑞虎8plus域控制器接口的主要列表:2.1 登录接口•接口名称:/api/login•请求方法:POST•请求参数:–username:用户名–password:密码•返回结果:–token:登录成功后返回的访问令牌该接口用于用户登录域控制器系统,验证用户名和密码,并返回一个有效的访问令牌,用于后续接口的访问权限验证。
2.2 用户管理接口•接口名称:/api/users•请求方法:GET/POST•请求参数:–token:访问令牌•返回结果:–users:用户列表该接口用于获取或创建用户,需要提供有效的访问令牌。
GET请求返回当前系统中的用户列表,POST请求用于创建新的用户。
2.3 权限管理接口•接口名称:/api/permissions•请求方法:GET/POST/PUT/DELETE•请求参数:–token:访问令牌•返回结果:–permissions:权限列表该接口用于管理用户的权限,包括获取、创建、更新和删除权限。
需要提供有效的访问令牌。
2.4 组管理接口•接口名称:/api/groups•请求方法:GET/POST/PUT/DELETE•请求参数:–token:访问令牌•返回结果:–groups:组列表该接口用于管理用户所属的组,包括获取、创建、更新和删除组。
需要提供有效的访问令牌。
2.5 日志管理接口•接口名称:/api/logs•请求方法:GET•请求参数:–token:访问令牌•返回结果:–logs:日志列表该接口用于获取系统的操作日志,需要提供有效的访问令牌。
3. 接口使用示例3.1 登录接口示例import requestsurl = ""payload = {"username": "admin","password": "123456"}response = requests.post(url, data=payload)token = response.json()["token"]print("登录成功,token:", token)3.2 用户管理接口示例3.2.1 获取用户列表import requestsurl = ""params = {"token": token}response = requests.get(url, params=params) users = response.json()["users"]print("用户列表:", users)3.2.2 创建新用户import requestsurl = ""payload = {"token": token,"username": "new_user","password": "123456"}response = requests.post(url, data=payload) if response.status_code == 200:print("用户创建成功")else:print("用户创建失败")3.3 权限管理接口示例3.3.1 获取权限列表import requestsurl = ""params = {"token": token}response = requests.get(url, params=params) permissions = response.json()["permissions"] print("权限列表:", permissions)3.3.2 创建新权限import requestsurl = ""payload = {"token": token,"name": "new_permission","description": "This is a new permission" }response = requests.post(url, data=payload) if response.status_code == 200:print("权限创建成功")else:print("权限创建失败")3.4 组管理接口示例3.4.1 获取组列表import requestsurl = ""params = {"token": token}response = requests.get(url, params=params) groups = response.json()["groups"]print("组列表:", groups)3.4.2 创建新组import requestsurl = ""payload = {"token": token,"name": "new_group","description": "This is a new group"}response = requests.post(url, data=payload) if response.status_code == 200:print("组创建成功")else:print("组创建失败")3.5 日志管理接口示例3.5.1 获取日志列表import requestsurl = ""params = {"token": token}response = requests.get(url, params=params)logs = response.json()["logs"]print("日志列表:", logs)4. 总结本文介绍了瑞虎8plus域控制器接口的定义和使用方法。
台迪控制器接口说明

台迪控制器接口说明一、概述在现代工业自动化系统中,控制器是一个至关重要的设备,用于管理和控制各种设备和机器。
台迪控制器是一种高性能、可靠性强的控制器,它提供了丰富的接口来实现与其他设备的通信和数据交换。
二、接口类型台迪控制器提供了多种接口类型,以满足不同设备和系统的需求。
以下是几种常见的接口类型:1. 串口接口串口接口是一种标准的通信接口,可用于连接计算机、显示器和其他外部设备。
串口接口在台迪控制器中使用广泛,在数据传输速度和稳定性方面具有优势。
2. 以太网接口以太网接口是一种通过网络进行数据传输的接口,可以实现不同设备之间的远程通信。
台迪控制器的以太网接口支持标准的TCP/IP协议,可以与许多其他设备无缝集成。
3. USB接口USB接口是一种通用的接口标准,可用于连接外部设备和计算机。
台迪控制器的USB接口可以用于和其他USB设备进行通信和数据交换。
三、接口功能在台迪控制器中,接口不仅用于传输数据,还可以实现其他功能。
以下是几个常见的接口功能:1. 数据采集台迪控制器的接口可以用于连接传感器和测量设备,实现数据的采集和监测。
通过接口传输的数据可以被控制器用于分析和判断,从而实现自动化控制。
2. 数据传输台迪控制器的接口可以用于将数据传输到其他设备或系统。
通过接口传输的数据可以实现设备之间的协调和同步,提高生产效率和工作效率。
3. 远程控制通过以太网接口,台迪控制器可以实现远程控制功能。
用户可以通过网络连接到控制器,监控和控制设备的运行状态,实现远程操作和管理。
四、接口设置和配置为了确保台迪控制器的接口正常工作,需要进行相应的设置和配置。
以下是一些常见的设置和配置操作:1. 端口设置在使用串口接口时,需要设置端口号、波特率和数据格式等参数,以确保数据的正确传输和解析。
2. IP配置在使用以太网接口时,需要进行IP地址的配置。
可以手动配置IP地址,也可以通过动态主机配置协议(DHCP)自动获取IP地址。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DK —K0021控制器接口定义
端子号 连接部件信号 信号状态 电流
(参考)
推荐线径
(平方)
备注 对应线束护套及
端子号
1 力矩传感器+9V 输入 20mA 0.3~0.5 传感器自有
2 力矩传感器+3.3V 输入 20mA 0.3~0.5
3 力矩传感器GND 输入 20mA 0.3~0.5
4 力矩传感器辅路 输出 20mA 0.3~0.
5 0~3.3V 5 力矩传感器主路
输出 20mA 0.3~0.5
0~3.3V 6 7 8 电机红线 输出 35A 2 电机自有
9 电机黑线
输出 35A 2 10 对接见信号插头型号:6098-2103
11 诊断开关 输入 20mA 0.3~0.5 低电平有效 12 状态灯 输出 20mA 0.3~0.5
低电平有效(对应线束颜色:棕) 13 转速信号 输入 (对应线束颜色:
黄) 14 车速信号 输入 20mA 0.3~0.5 12V 频率信号(对应线束颜色:兰) 15
点火信号
输入
20mA
0.3~0.5
高电平有效,12V (对应线束颜色:
白) 16 蓄电池+12V 输入 35A 2 (对应线束颜色:
红) 17 蓄电池GND
输入 35A 2 (对应线束颜色:
黑)
几点说明
1、目前提供的电子助力转向器已匹配线束,如量产建议做成整车线束。
2、目前提供的线束上有状态指示灯,可以考虑将此指示灯做在仪表盘上。
3、控制器放置位置要确定好,最好让电机线和传感器线满足直接插接在控制器上。
4、
5、诊断开关可以不考虑。
1、 P/S 控制模块
2、 控制耦合器
3、 扭矩传感器
4、 屏蔽线
5、 抑噪器
6、 里程表
7、 蓄电池
8、 点火开关
9、 电机和离合器
主程序中断程序
系统参数表。