西屋OVATION算法模块介绍
OVATION系统培训教材
OVATION控制系统培训教材检修部热控专业2005-1目录1.系统硬件 ........................................................................................................... - 1 -1.1.网络系统................................................................................................. - 1 -1.2.DPU ......................................................................................................... - 2 -1.3.I/O机架及柜内总线............................................................................... - 7 -1.4.远程站点的配置及连接......................................................................... - 9 -1.5.I/O模件................................................................................................. - 10 -1.6.AI模件.................................................................................................. - 13 -1.7.AO模件 ................................................................................................ - 15 -1.8.DI模件.................................................................................................. - 16 -1.9.DO模件 ................................................................................................ - 18 -1.10.VP模件 ............................................................................................. - 19 -1.11.脉冲计数模件.................................................................................... - 21 -1.12.其他模件............................................................................................ - 22 -1.13.机柜电源系统.................................................................................... - 23 -1.14.硬件的基本维护工作........................................................................ - 25 -2.服务器、工程师站 ......................................................................................... - 26 -2.1.服务器、工程师站概述....................................................................... - 26 -2.2.访问组态工具....................................................................................... - 27 -2.3.系统硬件组态....................................................................................... - 27 -2.4.系统数据库介绍................................................................................... - 30 -2.5.系统数据库的编辑............................................................................... - 34 -2.6.系统画面的组态................................................................................... - 39 -2.7.系统功能软件的使用........................................................................... - 57 -2.8.系统逻辑图的组态............................................................................... - 59 -3.操作员站基本操作 ......................................................................................... - 69 -3.1.操作员站画面概述............................................................................... - 69 -3.2.报警窗口的使用................................................................................... - 71 -3.3.趋势图的使用....................................................................................... - 72 -3.4.在系统中组建历史点........................................................................... - 75 -4.系统维护和管理 ............................................................................................. - 75 -4.1.SOLARIS系统基本维护 ..................................................................... - 75 -4.2.OV ATION系统备份和恢复................................................................. - 75 -4.3.组态操作员站custom graphic菜单显示的项目 ................................ - 77 -4.4.组态操作员站薄膜键盘中1-48个按钮的功能............................... - 78 -4.5.组态data analysis and maintaince菜单显示的项目 ........................... - 78 -OVATION系统培训教材OV ATION是美国西屋推出的最新分散控制系统,其控制网是标准的以太网,采用了高速、髙容量的商业化的硬件;系统的建立严格按照开放式标准进行,可以把第三方的产品很容易地集成在一起;先进的分布式全局数据库将功能分散到多个独立的站点,而不是集中在一个中央处理器;以上众多特点决定了系统的安全可靠和高可用性。
ovation常用算法说明
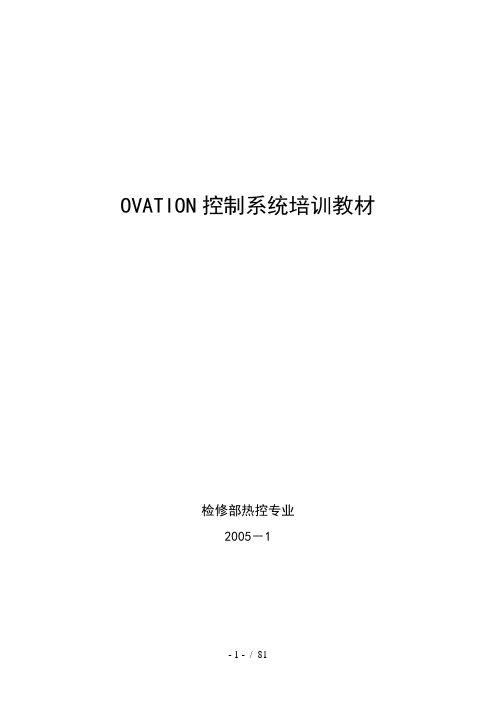
1-1. SETPOINT 带回路接口卡的软/硬设定值操作站功能:算法符号:1-2. MASTA TION (手动/自动操作站)功能:将一个基于CRT的软手动/自动操作站与一个可选的带有OV A TION回路接口模块卡结合到一起。
⏹算法符号:⏹工作方式:自动、手动、就地(Auto,Manual,Local)1-2-1.连接类型:⏹SOFT(软手操站),RLI 与回路接口卡相连带SLIM手操器(复位或上电时,读LI卡的值作为输出OUT),RVP与阀定位模块相连。
⏹自动模式:AUTOOUT = (IN1 x IN1 GAIN) + IN1 BIAS + BIAS BAR,当算法处在跟踪方式时,输出=跟踪输入,跟踪消失时,从跟踪输入回到OUT计算。
当升高禁止或降低禁止信号存在时,它会阻止输出跟踪跟踪输入值。
偏置BAR是在自动方式时有效加入MASTA TION的输出值,在手动方式时可修改但无效。
如果连接LI卡,则输出值写入LI卡。
⏹手动模式:ManualOUT=操作员在CRT上的手动改变输出,升/降禁止优先于手动键盘输出,而跟踪信号会使算法的输出=跟踪输入而不受升/降禁止信号的影响。
如果连接LI卡,则输出值写入LI卡,在本地模式下可通过SLIM改变输出值。
⏹本地模式:Local仅对选择LI卡和SLIM时有效。
在该模式下,由SLIM直接控制LI卡的输出。
MASTA TION读LI卡值且跟踪。
在这种跟踪方式下,控制器的所有定向命令(如……),对该算法均无效。
1-2-2.模式切换:MAMODE的数字抑制信号将拒绝将该算法从自动方式进入手动方式或者拒绝该算法从自动进入本地模式。
(当手动禁止性能打开时,MRE=1)通过CRT键切换(不在Local 方式下)在SLIM上切换。
如果连接LI卡,且硬件有错,算法会拒绝进入本地模式。
如果LI卡在本地模式时有一个SLIM通信错就会拒绝LI卡进入手动方式,而MASTA TION算法仍可进入手动方式。
Ovation系统介绍
热控—陈昭
目录
Ovation系统的硬件 Ovation系统的软件 调试过程中一点总结
Ovation系统的结构及硬件
典型的OVATION系统结构
站 : 设 置 和 操 作 功 能 的 人 机 接 口
服务器/工程师站
编程中心(建立数据库, 控制逻辑) Power Tools 服务器 Oracle 数据库服务器
221wwwwwwwpcei12345678910111213141516wpcei12345678910111213141516wpcei12345678910111213141516wpcei12345678910111213141516wpcei12345678910111213141516wpcei12345678910111213141516wfrontwwwwwwwpcei12345678910111213141516wpcei12345678910111213141516wpcei12345678910111213141516wpcei12345678910111213141516wpcei12345678910111213141516wpcei12345678910111213141516wrear?控制器底盘?安装板?iobranch5?8modules?iobranch6?8modules?每个摸块的io端子块终端器?i0子系统结构wirestripgauge信号端io基座baseterminationunit?每个基座有2个io卡槽?io卡支持热插拔即带电插拔?模块电源和辅助电源由总线连接emodule实现数模转换型号要与pmodule对应personalitymodule特性模块automaticinterconnectionofiobases自动互连io总线sparefuseholders备用保险丝孔?模件有电子id号?电子模块和特性模块都有代号terminalblocksupportsingle12awgcabletwo14awgcabledownto22awgpmodule提供通信介质的连接模块电源为卡件的工作电源辅助电源是指系统供电方式下提供给现场变送器的电源io模件?16channeldigitalinput?16channeldigitaloutput?4channelanalogoutput?8channelanaloginput?4channel3and4wirertdinput?16channelsequenceofevents?
西屋公司OVATION系统控制系统简介
OVATION-西屋过程控制及信息技术之大成西屋公司OVATION系统,包括以下几部分:1.OVATION 控制网络(FDDI)。
2.OVATION控制器。
3.OVATION过程I/O4.OVATION人机界面OVATION系统概要:西屋采用商用、可靠的工具,包括:•通讯网络•操作系统•标准工作站•工业标准结构•开放式通讯协议1.OVATION控制网络:OVATION的高速FDDI网络不同于其它DCS系统,它是一个完全确定性实时数据传输网络,即使在工况扰动的情况下也决不丢失、衰减或延迟信号。
此外,按照ANSI标准,FDDI提供全冗余的反转双环,并且在双环电缆中断时,使用自动重新组态功能以屏蔽发生错误的部分。
1.1 网络标准FDDI网络可使用户采用最好的方法来获取系统信息,不用考虑协议、网络管理和操作系统等。
OVATION网络软件采用ISO/OSI标准,可以在任何一个标准物理网络层中通讯,在使用FDDI时具有所有网络的特性:冗余、同步、确定和令牌传输。
当在与以太网、快速以太网、令牌环或其它拓扑结构相连时它使用TCP/IP协议。
OVATION系统的设计原则是从上到下的所有标准都合成一个完全开放的环境,所以OVATION允许最终用户在系统中集成其它厂商的产品。
基于开放式的通讯协议,OVATION 系统已经成功的将全厂区域自动控制和信息组成了一个整体,在今后所有的版本中也会无一例外的使用所有标准组合。
1.2 特性:速度 100MB 每秒容量 200,000实时点每秒长度 200公里站点 1,000个介质 光纤或铜缆2.OVATION控制器特点:•具有处理多种应用程序(包括网络)的能力•提供控制器完全无扰动切换的能力•兼容第三方用于数据通讯、控制、 用户 C 语言编程和仿真的软件•支持多任务和优先任务计划•完全符合 POSIX1003.1b的开放系统 标准•容易理解的命名法表示过程点(优于使用复杂的名称或硬件地址加偏移 量的命名法)•RTOS所占内存低于 50KB•RTOS存储和启动使用闪存(Flash Memory-20MB) (无需电池固化的内存)•RTOS的模块式结构只执行控制算法和通讯的功能•应用软件的组态程序记录在闪存中2.1 控制器硬件的规格处理器 Intel 奔腾时钟速度 133MHz控制内存 3MB闪存 20MB内存 32MB DRAM总线结构 PCI总线I/O模件 最多 128个就地卡件远程 最多1024块远程卡2.2 控制器规格:点的类型 最大量发生点(有点名) 最多到 16,000模拟量(硬接线) 1,024数字量(硬接线) 2,048SOE(硬接线) 1,024过程控制区域 最多 5个I/O 采样速度 10毫秒到 30秒I/O 接口 PCI总线(OVATION 和 Q-Line)2.3 应用程序:OVATION控制器为了满足用户的需求 ,提供了大量的应用程序和功能: •连续(PID)控制•布尔逻辑•特殊逻辑和定时功能•数据采集•SOE处理•冷端输入补偿•过程点传感器/限位检验•过程点报警处理•过程点转换为工程单位•过程点数据库存储•就地和远程 I/O接口•过程点上标签2.4 历史事件顺序(SOE)整体的 SOE处理能力由 I/O子系统和标 准软件提供。
Ovation系统简介

仿真试验成为数字化仪控系统真正投入运行前原理样机、工程样机研制过程中非常重要的手段之一。
Ovatio n系统简介在核电站数字化仪控系统开发仿真试验中.采用的是西屋公司Ovation的最小配置系统。
这是一个可以扩展的快速以太网系统.其中的SUN Blade150工作站既作为工程师站,又作为操作员站,所有的控制组态都在SUN工作站上进行。
从而建立的最小配置核电站数字化仪控系统组成包括:I /O卡件、控制器、高速数据通信网络、系统服务器、操纵员控制台、工程师站、显示器、键盘、微机等。
该Ovati on系统的硬件配置如图7:(1)Sun Blade15O工作站一台,作为Ovation系统的操作员站和工程师站,主要用于完成监视以及组态等任务。
主要性能指标和配置为:600MHz Sparc处理器芯片;512M内存;36G内置硬盘;32M 显存的显示卡;20英寸纯平彩色CRT显示器;软盘驱动器、CD—ROM驱动器;外置SCSI硬盘盒和磁带驱动器。
(2)Ovatio n控制器一套.可实现从10ms~30 S五种不同频率的过程控制.并实现报警处理、冗余处理、控制状态和备份状态管理、以及故障自动切换等功能。
配备了VxWorks嵌入式实时操作系统。
两组控制器硬件,互为冗余:两组控制器电源.互为冗余。
CiSCO24口高速交换机,作为Ova t ion控制器和Sun工作站通信连接的桥梁.提供1 00M带宽的高速以太网通信条件。
4个I/o模块,主要是数据的采集和发送模块.包括模拟量和数字量的处理。
模拟量输入/输出模块,8路输入/输出信号互为隔离.每路有单独的A/D(D/A)转换器.O.4w低功耗.1 3位分辨力.正常时每秒刷新10次.每8 S自动校验一次.每路电流输入配有熔断保险丝。
OVATION模块图例剖析

从I/O总线输入N位BCD码到功能处理器
从功能处理器输出到I/O总线的N位BCD码
两个输入的浮点数比较, 设置的标志为>,<,=
1个角的余弦(弧度)
基于回路时间(扫描周期)的上升/下降计数器
偏差监视
两个模拟输入之间的偏差监视器(带死区)
在一个顺序控制组态中,控制一个步或过程
带标志的数字计数器,如果N个输入的M个是真, 则输出标志是真。(M<12)
逻辑图符 功能 控制界面或接口 内部点(指示) 图 报警 外部点,I/O 数字输入 数字输出 内部图之间的连接器 交叉参考字母 页号 图符
经高速公路的站之间连接器
图符 算法名称
说明
带复位的交替动作的触发器
输入的绝对值
监视多达16个模拟或数字点的报警状态
带有1个或2个输出且多达30步的软件包控制 器
一个输入的增益与偏置
理想气体质量或体积流量的温度和压力补偿的计算
信号高限监视器
选择带有增益和偏置的两个输入最大值
提供线性入质量的锁存与去锁
超前-滞后补偿器,如果选择超前,输出是输入对时间的微分;如果选择滞后,输出 等于一个惯性时间后的输入,即输出跟踪输入有惯性。
基于一个输入值(索引)输出 50个预定义整数值中的一个
得到一个输入点的N个采样值并 输出,采样带有迟延。
从一个打包数字点得到多达16个数 字点的值。
具有偏差控制调制装置的数字定位,允许保 持3个类型的输出脉冲的通或断。
两个输入的异或
监视两个变送器的质量和偏差,允许选择一个输 入A、B中的高、低或平均值作为输出。
多达8个输入的逻辑与门
信号器 计算一个基于报警器逻辑运算结果的报警窗口状态
以10或e为底标度输入的反对数
西屋公司的OVATION系统DEH的操作功能

西屋公司的OV ATION型集散控制系统,其先进性在于分散的结构和基于微处理器的控制,这两大特点加上冗余使得系统在具有更强的处理能力的同时提高了可靠性。
100MB带宽的高速以太网的高速公路通讯使各个控制器之间相互隔离,又可以通过它来相互联系,可以说是整套系统的一个核心。
系统的主要构成包括:工程师站、操作员站、控制器等。
一)进入DEH操作画面的方法。
通过操作员站的Window(1-4)点击工具栏上的Page – Top进入主画面,如图1。
在进入DEH的主画面后,可以通过主画面调用不同的画面。
图1二)DEH操作主画面DEH OVERVIEW。
DEH UNIT OVERVIEW是本DEH系统中最重要的操作画面,如图2。
图2三)DEH 基本控制功能基本控制区包含了控制方式、启动方式、目标速率、反馈切投、阀门模式、高低限制以及汽机挂闸、OPC切投、手操面板、阀门活动试验、阀门严密性试验、同期控制、快关功能投切等。
A ) 控制方式选择在DEH主画面上点击CNTL MODE 按钮,弹出DEH控制方式操作画面,如图3。
DEH控制方式包括操作员自动方式、ATC方式、遥控方式、手动同期方式、自动同期方式。
图3进行控制方式切换:先点击控制方式按钮,点击后,相应按钮右方的状态显示框会变成红色,再点击下方的IN SERVICE 或OUT OF SERVICE 按钮,实现控制方式切换。
右方的显示区以IN 或OUT 来表示该控制方式的投入或退出。
遥控、自动同期及手动同期都是建立在操作员自动控制方式的基础上的,三种方式不能同时存在,进入某种方式会自动退出其它方式。
点击手动同期按钮后,会进入手动同期操作画面(图4),点击MANUAL SYNCH按钮后,其按钮右方的状态显示框会变成红色,再点击下方的IN 或OUT 按钮。
右方的显示区以IN 或OUT 来表示手动同期的投入或退出,操作员可以通过安RAISE SPEED-1RPM/LOW SPEED-1RPM升降按钮来调整汽轮机转速。
OVATION组态的DEH系统1

可调的模拟量参数有: (1)目标转速值(TARGET SPEED); (2)目标压力值(TARGET TP); (3)目标调速级压力值(TARGET IP); (4)目标阀位值(TARGET VALVE); (5)负荷率(LOADRATE); (6)加速率(ACCEL RATE); (7)负荷高限(HIGH LOAD LIMT);
(8)负荷低限(LOW LOAD LIMT); (9)阀限(VALVE:POSITION LIMIT); (10)主蒸汽压力保护限值(THR01、PRESS LIMIT)。 逻辑量参数的调整包括状态选择、方式切换、 功能投退、进行和保持等。 调整模拟量参数时,可进人有关画面,在弹 出的操作窗口中,修改参数后按下确认键。
(9)在线试验。1)喷油试验;2)电气、机械超 速试验;3)阀门活动试验;4)阀门严密性试 验;5)电磁阀试验。 (10)控制方式切换。 (11)ATR热应力控制。
二、控制系统配置 DEH控制系统硬件配置主要由以下部分组 成:(1)机柜;(2)电源系统;(3)模块;(4)操 作员站;(5)工程师/高性能工具库工作站。
DEH接受双路交流不停电电源,内部有冗 余设计,一路失电,另一路可自动接通。 其直流电源采用了冗余技术,即一块电源 模件故障,仍然不影响系统的正常工作。 带CPU的控制器,按所完成的控制任务不 同,在系统中分为两组:自动控制和自启 动。每一组配置有冗余的处理器。
超速保护及自动控制部分主要完成①转速测 量以及各种紧急情况的处理,如甩负荷、 负荷不平衡、超速限制、超速遮断等;② 参数的设置、反馈回路的投切、控制方式 的选择、电磁阀试验、喷油试验;③伺服 控制、手动自动方式选择、快卸负荷、单 阀/顺序阀、挂闸等。 自启动部分主要完成信号检测与替换、参数 越限报警、保持、自启动、应力计算及寿 命管理。
ovation常用算法Word版
1.Ovation 控制系统常用控制算法1-1. 模拟量控制常用算法1. 三选中MEDDIANSEL2. 二选一2XSELECT3. 加法器SUM4. 函数发生器 FUNCTION5. PID 调节器6. 软手操器 MASTATION7. 控制方式切换器MAMODE8. 控制输出平衡器BALANCER9. 切换器TRANSFER10. 常数发生器AVALGEN11. 高、低监视器HIGHLOWMON12. 低监视器LOWMON13. 高监视器HIGHMON1-2. 逻辑控制常用算法1. TD ON 延时闭合2. NOT 非门3. ONESHOT 上升沿脉冲发生器4. OR 或门5. AND 与门6. ASSINGN7. KEYBOARD 操作键盘接口2.控制算法基本概念2-1. 算法符号定义1. 实线实箭头模拟量点(必须输入或输出)2. 虚线空箭头数字量点(必须输入或输出)3. 虚线实箭头模拟量(任意)4. 虚线空箭头数字量(任意)2-2. 算法参数Variable(变量)=(输入/输出点)Tuning Constant(调整参数)=保持常量的固定参数(可在操作员站或通过Control Builder修改)Data Initialization (数据初始化参数)=固定常量(不可由OPR改变,可由CB 改变)Selectable(可选择的)=调整参数即可以是一个算法记录域的可调整常数也可以是一个点记录域。
2-3. 算法的品质检查和品质传递当一个无效数输入到算法时(如负数的平方根),一般输出也为无效,并且用Bad品质作标记。
无效数有三种:未定义的,不正常的,NAN。
一个未定义数是从没有合理结果的数学运算中产生的,一个NAN(非数值)无效字是一个不可识别的实数格式,且不该出现,当算数运算结果太小,以致无法用实数格式显示时,不正常数就产生了,此时站点进入报警状态,其故障码为66,错误标识ID=3。
算法输出点的品质选择输入点最差的品质。
美国西屋ovation 系统配置介绍
OVATION系统配置描述OVATION系统特点及其在电厂优化设计中的应用一、DCS发展的新阶段自从70年代年推出第一套工业DCS系统到现在已有24年了。
DCS由于集成了4C技术(puter,munication,CRT,Control)克服了传统仪表自动化系统中诸多缺点,实现了仪表自动化领域中的四个取代,即:1、用数字技术取代模拟技术,使测量精度提高了一个数量级。
2、用CRT取代了常规模拟仪表,压缩了监视面和控制室面积,使运行操作员得到的过程信息更集中、更生动和丰富多彩,操作更灵活有效。
3、用编程技术取代了原调节顺控的硬接线,极减少了施工调试工作量,使自动、顺控的投入率有很大的提高,取得了明显的效益。
4、用先进控制算法部分取代常规PID算法,使一些用PID算法不易取得实效的过程实现了自动。
提高了控制精度,这一过程目前仍在继续。
但是我们还应当看到当前在我国电力工业中使用的众多DCS系统及其应用还存在不少问题。
首先,我们当前使用的DCS绝大部分都是专利的不开放系统,由于目前大部分DCS是不开放的,所以DCS总的技术水平落后于计算机技术的发展水平。
其次,当前电力工业中应用的DCS 绝大部分未实现物理分散。
为了实现DCS ,把所有测点都引入中央控制室,其电缆费用高得惊人。
以2×300MW机组为例,其控制测量用电缆高达1400公里,与电缆有关的直接间接费用高达5000万元,大大高于DCS本身的费用。
第三,DCS使用围不宽,当前还只限于机炉本身的控制,电气控制纳入DCS 才刚开始,未能使DCS成为电厂各车间的信息中心。
工作站和以PC为基础的人机界面,以工业PC为基础的I/O控制器IEEE标准网络技术及规约组成的过程控制系统才是真正开放的计算机系统。
二、OVATION系统特点介绍OVATION系统是西屋公司在总结WDPF系统大量使用经验基础上容纳了最新技术成就,历时3年,于1997年9月正式宣布可在我国投放市场。
OVATION软件及数据流

各站配置
OVATION控制系统培训
软件系统
操作系统 应用软件 应用流程
1. 打开POWER TOOL软件中初始化软件(ININ TOOL) 对系统进行初始化配置。主 要是定义工程项目中单元UNIT、站DROP、站的类型,IP地址,计算机(上位机、
OVATION系统组态配置应用流程
下位机)ID,各站所应有的功能
OVATION系统中数据关系
OVATION系统中数据库之间的关系,有以下几种情况 :
数据关系
数据流 数据库 数据库关系
各站配置
用到系统中,需将工程师站上的数据下装到控制器或操作员站。具体情况如下:
1)将工程师站上的点信息、组态下装到各自的控制器中,须使用Drop loader软 件,在将工程师站上的点的信息下装到控制器的同时,还会将点的信息中和显示有 关的的信息(静态数据、动态数据)自动发送到各操作员站上分散式数据库中 (RAIMA数据库)。 2)将工程师站上的流程画面信息或组态信息下装到各操作员站须使用POWER TOOL软件包中Ovation ADMIN Tool软件,使用其下装(Download)功能。
数据关系
数据流 数据库 数据库关系
容易。用来建立控制逻辑(即组态)。所有组态采用标准的“科学仪器制造商 协会”(SAMA)和“布尔”的一组算法符号作为图符和算法模块。可随时将
控制策略下载到控制器,该软件包自动生成执行码。
各站配置
15. 图形建立器 Graphic Builder:用来建立工程上使用的操作或监视画面 (包括静态流程、动态信息、报警信息等)
数据关系
数据流 数据库 数据库关系
载图形到各站的功能 。
各站配置
Power Tools->Ovation Config Tools->ovation Admin tool P172页详细介绍 2. 点建立器 Point Builder:定义、增加、删除或修改点信息,并保存在 ORACLE数据库中,可以实现对系统内所加点的一致性检查 。 3. I/O建立器 I/O Builder:定义各控制站中所包括的各I/O模块的相关信息。如 I/O模块的地址,类型
DCS-ovation资料
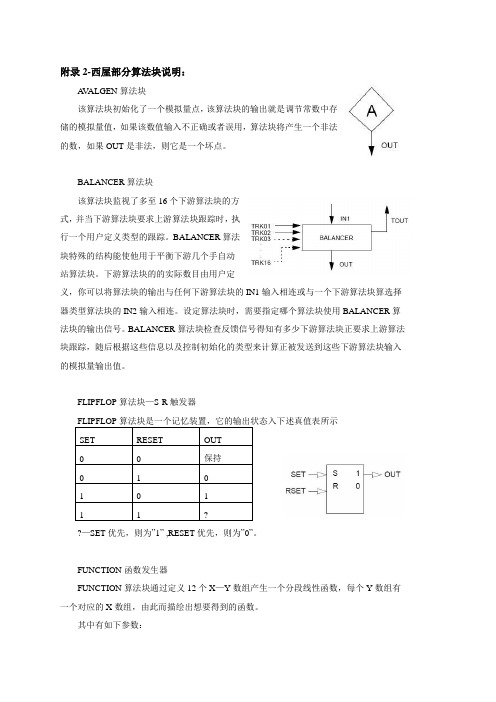
附录2-西屋部分算法块说明:A V ALGEN算法块该算法块初始化了一个模拟量点,该算法块的输出就是调节常数中存储的模拟量值,如果该数值输入不正确或者误用,算法块将产生一个非法的数,如果OUT是非法,则它是一个坏点。
BALANCER算法块该算法块监视了多至16个下游算法块的方式,并当下游算法块要求上游算法块跟踪时,执行一个用户定义类型的跟踪。
BALANCER算法块特殊的结构能使他用于平衡下游几个手自动站算法块。
下游算法块的的实际数目由用户定义,你可以将算法块的输出与任何下游算法块的IN1输入相连或与一个下游算法块算选择器类型算法块的IN2输入相连。
设定算法块时,需要指定哪个算法块使用BALANCER算法块的输出信号。
BALANCER 算法块检查反馈信号得知有多少下游算法块正要求上游算法块跟踪,随后根据这些信息以及控制初始化的类型来计算正被发送到这些下游算法块输入的模拟量输出值。
FLIPFLOP算法块—S-R触发器?—SET优先,则为”1” ,RESET优先,则为”0”。
FUNCTION函数发生器FUNCTION算法块通过定义12个X—Y数组产生一个分段线性函数,每个Y数组有一个对应的X数组,由此而描绘出想要得到的函数。
其中有如下参数:GAIN :输入增益BIAS :输入偏置 TPSC :输出点最大值 BTSC :输出点最小值 TRA T :跟踪速率 BPTS :折点数 X-1:第一点输入 Y -1:第一点输出GAINBIAS 算法块该算法块用一个内部增益乘以模拟量输入,增加了一个偏置,并限制输出值。
为了按输入比例放大输出,以如下方式计算必须的增益和偏置:MINMAX MINMAX IN IN OUT OUT Gain --=;MIN MIN IN Gain OUT Bias ⨯-=如果算法块得到一个非法的输入值或者计算一个输出的非法值,则站将报警。
GASFLOW 算法块该算法块计算理想气体的压力温度补偿质量或测体积流量。
第十三章Ovation分散控制系统

第十三章 Ovation分散控制系统美国西屋电气公司1982推出WDPF,1989年推出WDPF-Ⅱ,1997年推出Ovation。
进入21世纪后,西屋电气公司并入艾默生公司,Ovation又经历了几次大的更新,使Ovation始终跟随自动化新技术的发展。
Ovation进入火电厂后,不但带来了开放式的计算机技术,而且又保证了火电机组的安全和经济运行。
Ovation在国内火电机组的应用较多:300/350MW机组主要有平凉l~4号、宝钢1~2号、铁岭1~3号、姚孟1号、胜利油田1~2号、曲靖3~4号、营口1~2号、华能大连1~2号、华能珞璜1号、广安3~4号、浦圻1~2号、榆社1~2号、古交1~2号、嘉峪关1~2号、江油3~4号、河津3~4号等;600MW机组主要有邹县1~2号、托克托1~8号、北仑1~2号、韩城二厂1~2号、汕头3号、太仓3~4号、利港5~8号、宁德1~4号、上都1~2号等。
1000MW机组主要有邹县3~4号、玉环1~4号。
第一节 Ovation结构Ovation的结构包含系统结构和网络结构两个方面,如图13-1所示。
图中:服务器/工程师站为编程中心,用于建立数据库和控制逻辑;历史站作为长期点数据的存储(周、月、年),检索操作站/报警站的历史趋势;操作员站为监视和控制的人-机接口;冗余控制器对1~52对火电厂生产过程进行监视和控制;SWITCH为交换机。
一、系统结构及特点Ovation由数据高速公路和站点两大部分组成。
站点包括两大类,即:①与生产过程接口的Ovation控制器;②人机接口装置,包括操作员站(OPS)、工程师站(ENG)、历史数据站(HSR)、智能设备管理站(AMS)、OPC SIS接口站等。
同时,它还可以和其他的控制系统以及信息系统进行标准化的开放的连接。
Ovation系统的设计具有开放式的思路,它采用了奔腾处理器、模块化I/O和功能强大的工作站,特点如下:①高速、高容量的主干网络采用商业化的硬件、软件、网络和通信接口,以取代过去有专利性的DCS结构;②基于开放式工业标准,Ovation能把第三方的产品很容易地集成在一起,例如,Ovation可以和ABB公司的可编程控制器(PLC)硬件和软件直接地、实时地集成在一起;③分布式全局数据库将功能分散到每个独立站点,而不是集中在一个中央处理器中;④电子装置具有低功耗可减少控制室通风和空调的费用;⑤从Ovation网络一直到I/O插板的电源装置都可以用冗余组态方式提供,以获得最高的系统可靠性;⑥直观的诊断方法使维护人员能很快地确定系统在哪里出现了问题;⑦Ovation 包括一套直观的编程工具,使用户组态控制系统安全、方便;⑧通过对几个系统的组合,用户还可以获得一个联合网络,并能保证过程的安全,从而显著地减少工程设计工作;⑨整个系统采用了模块式部件,所有模块在线更换时不需要工具或特殊部件。
OVATION 3.0.4笔记
上海西屋OV ATION培训总结目录概述 (6)第一周OV010及OV100综合 (7)一、OV ATION 系统概述 (7)1、工作站 (7)1.1服务器(Software Server) (7)1.2 工程师站(Engineering Working Station) (7)1.3 操作员站(OPR) (7)1.4 历史站(HSR) (7)1.5 OPC站 (7)2、控制器(冗余配置) (8)3、网络 (8)4、站的一般命名规则 (8)4.1 服务器:DROP 200 (8)4.2 工程师站:DROP 201 (8)4.3 操作员站 (8)4.4 历史站 (8)4.5 OPC站 (8)4.6 控制器 (8)二、OV ATION 系统网络介绍 (9)1、交换机的选型 (9)1.1 ROOT交换机G02、G03 (10)1.2 Fan-Out 交换机G04、G05 (10)1.3 Root 交换机G06、G07 (11)1.4 Root 交换机G08、G09 (11)1.5 Root 交换机G12、G13 (11)1.6 Core 交换机 (11)2、IP地址分配原则及通讯的实现原理 (12)2.1 OVATION网络IP地址分配原则 (12)2.2 OVATION系统不同类型设备通讯原理 (12)三、控制器、IOIC卡件介绍 (13)1、CPU模块5X00241G01 (13)1.1 控制器 (13)1.2 控制器的负荷 (14)1.3 控制器的指示灯 (14)1.4 控制器串行与并行通讯优缺点: (14)2、IOIC I/O接口卡:5X00226G01/G02 (15)3、I/O B ASE (15)4、终端模块 (15)5、I/O卡件 (16)四、I/O子系统 (16)1、I/O卡件安装原则 (16)2、I/O卡件的地址表示 (17)2.1 本地分支I/O卡件地址格式 (17)2.2 远程节点控制器 (17)2.2.1远程节电控制器通讯介质 (17)2.2.2 远程节点控制器地址的设置 (17)2.2.3 远程I/O节点控制柜卡件的地址格式 (17)3、信号线的连接 (18)4、电源分配单元:PDM (18)5、接地规则 (19)五、OV ATION DEVELOPER STUDIO (19)1、CPU(控制器)初始化及更换 (19)1.1 闪存格式化 (19)1.2 闪存卡插入CPU卡件,安装OCR400,连接网线 (20)1.3 查看CPU硬件地址 (20)打开Developer Studio,找到相应的控制器,右键Open (20)1.5 配置地址后通讯检查 (21)1.6 对控制器进行Download下装 (21)1.7 下装完成后状态检查 (21)1.8 清除控制器中旧文件 (21)1.9 对控制器做Load (22)2、点的概念 (22)3、卡件的定义 (22)3.1 卡件的创建 (22)3.1.1 模拟量输入卡AI卡创建(4—20mA) (22)3.1.2 模拟量输出卡AO创建(4—20mA) (24)3.1.3 热电阻输入卡件RTD创建 (24)3.1.4 热电偶输入卡TC创建 (25)3.1.5 数字量输入卡DI创建 (25)3.1.6 Relay Output 继电器输出卡 (25)3.2 卡件的删除 (25)3.3 卡件定义正确性检查 (26)4、点的创建 (28)4.1 AI点的创建 (28)4.1.1 新建 (28)4.1.2 定义点名:例 (28)4.1.3 定义点各个属性选项 (28)4.2 AO点的创建 (38)4.2.1 新建 (38)4.2.2 命名点名例如:TANKXXXFILLDMD-1 (38)4.3 热电偶TC点创建 (38)4.3.1 创建冷端温度补偿点(AI点) (38)4.3.2 创建TC温度点 (39)4.4 RTD热电阻点创建 (41)4.4.1 新建 (41)4.4.2 各个属性选项 (41)4.5 DI点创建 (43)4.5.1 新建 (43)4.5.2 命名 (43)4.5.3 各个属性选项 (43)4.6 DO点创建(同DI点相似) (44)4.7 LP打包点创建 (44)4.7.1 新建 (44)4.7.2 命名 (44)4.7.3 各个属性选项 (44)4.8 SOE点创建 (45)4.8.1 控制器配置 (45)4.8.2 SOE卡配置 (45)4.8.3 SOE点 (45)六、OV ATION APPLICATIONS (46)1、报警A LARM (46)1.1 状态指示 (46)1.2 报警复位原则:点值已恢复,报警已确认。
OVATION算法模块介绍
System time functions: SYSTEMTIME, TIMECHANGE,
(系统时间功能)
TIMEDETECT, TIMEMON
0
Monitor functions: HIGHMON, LOWMON, HIGHLOWMON,
(监视功能)
RATEMON, RATECHANGE, QUALITYMON,
Math functions : GAINBIAS,
(计算)
INTERP, POLYNOMIAL, SQUAREROOT, SUM
Custom calculations: CALCBLOCK, CALCBLOCKD (自定义计算)
2
Combinatorial logic 组合逻辑
FLIPFLOP -- S-R触发器
报警检查类型x10当新报警出现fouttruex11当有多个报警未被确认的报警fouttruex12当任何一个报警时out1当又有新报警出现则fout1x13当任何一个报警时out1只要有报警位为1及有未被确认的报警则fout1monitorfunctions监视功能alarmmonratemonratelimqualitymoncomparedbequalshighmonlowmonhighlowmon25highmon高值监视功能
18
COUNTER -- 记数器
功能: 当 ENBL = 1时:IN1= 1每次扫描,记数器增加/减少 1。 当ACT 增加到TARG值时,OUT = 1, 当ACT 从TARG值开始减少时,减到ACT<=0时,OUT =1。
19
PULSECNT -- 脉冲记数
功能: 当 IN1 有一个 上升沿(从 0 到 1 ),OUT记一个数。
浅析OVATION离散控制逻辑宏
浅析OVATION离散控制逻辑宏摘要:随着现代科技的进步,社会的发展,电站单机容量不断提高,机组所需控制的设备和监测参数越来越多,自动化程度越来越高,手动控制已不能满足现代机组的控制要求,分散控制系统(DCS)已开始得到广泛应用。
AP1000作为我国引进第三代核电技术的代表,具备非能动性、高可靠性等优点。
本文对AP1000仪控系统OVATION的离散控制逻辑宏进行分析介绍。
关键词:AP1000;OVATION;离散控制;CCL前言DCS控制系统工程软件基本是由一些标准结构的软件模块即功能块组成,如与非门、宏、PID调节块等,各基本单元简单而标准化,复杂功能的实现通过用标准基本单元的复杂连接而完成,这使得DCS环境下的控制系统具有可任意组态的特点。
AP1000电站单机容量大,控制参数多,由功能块搭接的控制回路较为复杂,给电站仪控人员及时事故分析带来不便,或容易造成故障。
为此,如何既能满足电站设备的复杂性控制要求,又能保证维护人员对控制逻辑一目了然,是各个DCS厂家发展和提高的目标。
在机组控制设备中,电机、阀门等设备较多,且控制逻辑模式基本相同,所不同的是连锁保护、启动条件等外在因素,因此,这些设备的逻辑控制可以固话为一个逻辑图,即逻辑宏(CCL),将外在限制条件分别添加后即可形成不同的设备控制,可极大地节省工程设计人员的重复劳动。
OVATION控制系统为美国西屋公司产品,采用了功能块的搭接模式,不仅简化了设计,减少了工程人员的工作量,更为电站维护人员的事故分析、逻辑检查提供了便利条件。
本文主要对离散控制逻辑宏进行简单介绍。
1 离散控制逻辑宏的输入指令离散控制是指控制系统中有一部分信号不是时间的连续函数, 而是一组离散的脉冲序列或数字序列,在电站中指发出指令打开和关闭具有开关状态的设备,如电机、电动阀等设备。
CCL的输入指令由一个KEYBOARD模块、自动允许(AUTP)、正常自动(AUT)、优先自动(EMG)、远程手动(LRE)等组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
Hardware interface: FIELD, ATREND, X3STEP, ANALOGDEVICE (硬件接口) Pulse Acuumulator module interface: RPACNT, RPAWIDTH (脉冲记数) Point format conversion: BCDNIN, BCDNOUT, PACK16, (点格式转换) UNPACK16, SATOSP, SPTOSA, TRANSLATOR
OUT = VALU
VALU:是一个整定常数(Tuning Constant) 可(+ 或 -)
DVALGEN -- 数字量发生器
OUT = VALU VALU:当0.0时,OUT = FALSE 当为非0数值时,OUT = TURE
7
KEYBOARD -- 键盘接口
与键盘的接口算法
当键盘上对应键按下,则相应的输出输出一个 “1”脉冲。
Complex Sequential logic: DIGDRUM, ANALOGDRUM, (综合顺序逻辑) STEPTIME, MASTERSEQ, DEVICESEQ Timer/Counter functions: ONDELAY, OFFDELAY, ONESHOT (时间/记数功能) COUNTER, PULSECNT, DIGCOUNT, RESETSUM System time functions: SYSTEMTIME, TIMECHANGE, (系统时间功能) TIMEDETECT, TIMEMON
Y
停止设备运行
DVxx = 0设备停
TMOD = 1 ?
N N
Y
设备是否正在运行?
Y
TKIN = xx ?
N
N
设备是否准备运行?
Y
N
STEP = TKIN
HOLD = 1
Y
Proceed = 1? 设备是否故障?
N
HOLD = 1
Y
FAIL = 1 设备运行
N
HOLD = 0 DV设备输出置1
12
DIGDRUM -- 50步开关量顺序控制器
常用算法
Combinatorial logic: AND, OR, NOT, XOR, ASSIGN (组合逻辑) AVALGEN, DVALGEN, KEYBOARD
Basic Sequential logic: FLIPFLOP, AAFLIPFLOP (基本顺序逻辑) including alternate implentations
每步时间寄存器:
参数:
RHRS:显示当前步设置的以小时为单位的时间
RMIN:显示当前步设置的以分钟为单位的时间 RSEC:显示当前步设置的以秒为单位的时间 EHRS:显示当前步已走过的以小时为单位的时间 EMIN:显示当前步已走过的以分钟为单位的时间
ESEC:显示当前步已走过的以秒为单位的时间
15
Timer/Counter functions
参数: RATE OLDIN TS 变化率 上一个采样值 采样时间(控制器任务区速度)
28
RATELIM -- 变化率限制
功能:
参数: TEMP OLDOUT TS RALM 变化率 上一个采样输出值 采样时间(控制器任务区速度) 每秒单位的变化率限制值 29
QUALITYMON -- 质量监视
当ACT 从TARG值开始减少时,减到ACT<=0时,OUT =1。
19
PULSECNT -- 脉冲记数
功能: 当 IN1 有一个 上升沿(从 0 到 1 ),OUT记一个数。
20
DIGCOUNT -- 带标志的数字输入记数器
功能:当 有多于 Fra bibliotekTRU的输入为 1 ,或大于 NMIN 个输入为 1 时,
参数:
NMIN:最多步数 R01:第一步的输出寄存器 OUT2:第二个被选中的当前步寄存器值
14
STEPTIME -- 自动步进定时器
功能: STEP 自动步进,每一步的时间由参数设置。
当 TMOD = 1, STEP = TRIN 决定,
当 TMOD = 0,HOLD =1 则STEP保持当前步, 当STEP步全部结束,则STEP回到 1。 * 控制回路的时间必须是:100,200,500,1000ms
0
Monitor functions: HIGHMON, LOWMON, HIGHLOWMON, (监视功能) RATEMON, RATECHANGE, QUALITYMON, COMPARE, DBEQUALS Filtering: RUNAVERAGE, SMOOTH, LEADLAG, TRANSPORT, (滤波) PREDICTOR Transmitter processing: 2XSELECT, MEDIANSEL, GASFLOW, (转送处理) LEVELCOMP, STEAMTABLE, STEAMFLOW, QAVERAGE, FUNCTION, MULTIPLY, DIVIDE, BILLFLOW Core modulating control: PID, PIDFF, MASTATION, MAMODE, (控制算法) SETPOINT, TRANSFER, HISELECT, LOSELECT
24
HIGHMON -- 高值监视
功能:
若IN1为无效数值,则OUT保持上一次数值,且点质量为BAD。
25
LOWMON -- 低值监视
功能:
若IN1为无效数值,则OUT保持上一次数值,且点质量为BAD。
26
HIGHLOWMON -- 高低值监视
功能:
27
RATEMON -- 变化率监视
功能:
真值表:
?
? --- SET 优先, 则为“1” RESET 优先, 则为“0”
3
AAFLIPFLOP -- 带复位的交替动作触发器
仿真一个记忆设备的输出状态,当SRST为“1”时, 新的SRST改变。输出仍旧保持原来状态。 INIT --- 初始状态
真值表:
4
Basic Sequential logic 基本顺序逻辑
功能: 当IN1质量为参数CHK中设置的质量、或 IN1的值不被刷新,则 OUT = TRUE。
( CHK: 质量检验类型: BAD, FAIR, NOT GOOD, GOOD可选 )
30
COMPARE -- 输入比较
功能: 当ENBL = 1 ,比较: IN1 和 IN2 结果: IN1 = IN2 OUT = 1 IN1 > IN2 OUTG = 1 IN1 < IN2 OUTL = 1
50个32位整数寄存器(16进制数):
Step2执行高16位的输出 (因而,最多控制16个输出)
13
ANALOGDRUM -- 模拟量顺序控制器
功能: 1 输出OUT的值,由每一步寄存器的值决定,
最多30步,当到最大步数时,回到Step1。
2 步进方式由INC(增加)或DEC(减少)参数为TRUE决定 3 当TMOD = 1时,则执行哪一步由TRIN数决定
设备#1 (设备可以是一些复杂 的逻辑运算)
设备#2
. . . . .
反馈信号
9
参数:MASTERSEQ ENBL ---- 允许条件,当为TRUE时,顺序可以执行。 PRCD ---- 为TRUE时,顺序开始执行。 OVRD --- 为TRUE时,跳过此步。 RSET ---- 为TRUE时,复位。STEP记数回到0。 TMOD --- 工作方式:Normal(正常),Priority(优先级) TKIN ---- 有效步数。
OUT = TRUE 的条件: • 输入中有任何一个报警 • 点的1W字段中报警状态位或报警状态位为TRUE且未确认 报警位为FALSE.
参数: ALRM: 报警检查类型 X1= 0 当新报警出现,FOUT = TRUE X1 = 1 当有多个报警、未被确认的报警,FOUT = TRUE X1 = 2 当任何一个报警时,OUT=1, 当又有新报警出现,则FOUT = 1 X1 = 3 当任何一个报警时,OUT=1 只要有报警位为1,及有未被确认的报警,则FOUT=1
* 此算法应用于回路设定值、输出值、手/自动切换。
8
Complex Sequential logic
综合顺序逻辑
MASTERSEQ, DEVICESEQ, DIGDRUM, ANALOGDRUM, STEPTIME,
MASTERSEQ -- 主设备顺序控制器算法 DEVICESEQ -- 顺控设备算法
22
System time functions
系统时间功能: SYSTEMTIME
SYSTEMTIME --- 系统时间读取
功能: RUN = 1 :记录当前控制器的时间,时间以 UTC 形式显示 (UTC Universal Time Coordinates) SEC:秒 MIN:分 HOUR:小时 DAYM:天 MNTH:月
AND, OR, NOT, XOR, ASSIGN, AVALGEN, DVALGEN, KEYBOARD AND -- 与门
最多 8 个开关量输入
OR -- 或门
最多 8 个开关量输入
5
NOT -- 非门
XOR -- 异或门
相同为0,不同 为1
ASSIGN -- 传递点信息
6
AVALGEN -- 模拟量发生器
输出端由DEVICESEQ算法控制
FAIL ---- 某执行步故障,输出= 1
HOLD --- 保持在某步时,输出= 1
DONE --- 全部顺序结束,输出=1,且STEP置1。 STEP ---- 当前的步号