MATLAB托马斯算法(追赶法)实现
matlab追赶法解常微分方程

研究领域:数学、计算机科学文章标题:深入探讨matlab追赶法解常微分方程在数学和计算机科学领域中,常微分方程是一个重要且广泛应用的课题。
而matlab追赶法作为常微分方程的求解方法,在实际应用中具有重要意义。
本文将以深度和广度兼具的方式,对matlab追赶法解常微分方程这一主题展开全面评估,并撰写一篇有价值的文章,同时结合个人观点和理解,为读者提供深刻的思考。
一、matlab追赶法解常微分方程简介1.1 matlab追赶法基本原理matlab追赶法,又称托马斯算法,是一种用于求解三对角线性方程组的方法。
在常微分方程的数值解法中,常常会遇到需要求解三对角线性方程组的情况,而matlab追赶法正是针对这一问题而提出的高效算法。
1.2 追赶法在常微分方程求解中的应用常微分方程在实际问题中有着广泛的应用,而求解常微分方程的过程中往往需要用到追赶法。
追赶法不仅可以提高计算效率,还可以有效地解决数值稳定性和精度的问题,因此在工程和科学计算中得到了广泛的应用。
二、深入探讨matlab追赶法解常微分方程2.1 算法实现及优化matlab追赶法的实现涉及到矩阵运算、追赶过程和追赶系数的求解等关键步骤。
如何针对不同类型的方程组进行算法优化,是一个需要深入探讨的问题。
通过优化算法,可以提高追赶法的计算效率和数值稳定性,使其在常微分方程求解中发挥更大的作用。
2.2 算法的数值分析通过数值分析,可以更加深入地了解matlab追赶法在解常微分方程过程中的数值特性。
包括收敛性、稳定性、误差分析等方面,这些都是影响算法性能和应用效果的重要因素,需要进行深入的研究和分析。
三、对matlab追赶法解常微分方程的个人观点和理解3.1 算法的优势与局限性matlab追赶法作为一种高效的求解算法,具有较好的稳定性和精度,特别适合于大规模的常微分方程求解。
但在某些特定问题上,追赶法的适用性和效率仍然存在局限性,需要进行合理的选择和应用。
MATLAB中常见的图论算法介绍
MATLAB中常见的图论算法介绍一、引言图是计算机科学中非常重要的一种数据结构,广泛应用于各个领域。
图论算法能够解决多种问题,如网络分析、社交网络分析、路径规划等。
在本篇文章中,我们将介绍一些在MATLAB中常见的图论算法,帮助读者了解和应用这些算法。
二、图的表示方法在MATLAB中,图可以用邻接矩阵或邻接表来表示。
邻接矩阵是一个二维矩阵,其中行和列分别代表图的节点,矩阵中的元素表示节点之间的关系。
邻接表是一个包含图中所有节点的列表,每个节点链接到其相邻节点的列表。
三、最短路径算法1. Dijkstra算法Dijkstra算法用于解决单源最短路径问题,即寻找一个节点到图中其他所有节点的最短路径。
算法的基本思想是通过不断选择最短路径的节点来逐步扩展最短路径树。
在MATLAB中,可以使用graph对象和shortestpath函数来实现Dijkstra算法。
首先,使用graph对象创建图,然后使用shortestpath函数计算从源节点到目标节点的最短路径。
2. Bellman-Ford算法Bellman-Ford算法也用于解决单源最短路径问题,但相比Dijkstra算法,Bellman-Ford算法可以处理带有负权边的图。
算法的基本思想是通过松弛操作来逐步减小节点的估计距离,直到找到最短路径。
在MATLAB中,可以使用graph对象和shortestpath函数来实现Bellman-Ford算法。
与Dijkstra算法类似,首先使用graph对象创建图,然后使用shortestpath函数计算最短路径。
四、最小生成树算法1. Prim算法Prim算法用于寻找一个无向图的最小生成树。
算法的基本思想是从一个初始节点开始,逐步添加边,直到所有节点都被连接成一棵生成树。
在MATLAB中,可以使用graph对象和minspantree函数来实现Prim算法。
首先,使用graph对象创建图,然后使用minspantree函数计算最小生成树。
matlab中的levenberg-marquard方法

在MATLAB中,你可以使用`lsqnonlin`函数来实现Levenberg-Marquardt方法。
Levenberg-Marquardt方法是一种非线性最小二乘问题的优化算法,用于求解具有高度非线性的目标函数的最优解。
该方法通过调整参数来平衡最速下降法和高斯-牛顿法之间的权衡,从而实现更快的收敛速度和更好的稳定性。
下面是使用Levenberg-Marquardt方法求解非线性最小二乘问题的基本步骤:1. 定义目标函数:首先需要定义一个非线性函数,表示你想要求解的最小二乘问题。
2. 定义初始参数估计值:根据问题的特点,给出一个初始的参数估计值。
3. 定义残差函数:将目标函数与实际观测数据之间的差异定义为残差函数。
4. 调用`lsqnonlin`函数:使用`lsqnonlin`函数来求解最小二乘问题。
该函数需要输入目标函数、初始参数估计值和残差函数,并返回最优的参数估计值。
以下是一个简单的示例代码,演示如何在MATLAB中使用Levenberg-Marquardt方法求解非线性最小二乘问题:```matlab定义目标函数fun = @(x) x(1)*exp(-x(2)*[1:10]) - [2, 4, 6, 8, 10, 12, 14, 16, 18, 20];定义初始参数估计值x0 = [1; 0.1];定义残差函数residuals = @(x) norm(fun(x));调用lsqnonlin函数求解最小二乘问题options = optimoptions('lsqnonlin', 'Algorithm', 'levenberg-marquardt');x = lsqnonlin(residuals, x0, [], [], options);disp('最优参数估计值:');disp(x);```在上述示例中,我们首先定义了一个目标函数`fun`,然后给出了初始参数估计值`x0`。
追赶法(Thomas算法)
二、解三对角线性方程组的追赶法 定理1:满足引理1条件的三对角方阵A有如下形式的 唯一的克劳特分解。
p1 a2 A= pn
p2 a3 pn 1 an
1 q1 1 q2 =PQ 1 qn 1 1
其中
p1 = b1 (i = 1,2,, n 1) qi = ci pi p = b a q (i = 2,3,, n ) i i i 1 i
解三对角线方程组Ax = f可化为求解两个三角形 方程组
Py = f
Qx = y
(1) 解 Py = f
p1 a2 ( P, f ) = p2 a3 pn 1 an f1 f2 f3 pn f n
得
{
y1 = f1 / p1
yi = ( f i ai yi 1 ) / piຫໍສະໝຸດ (i = 2,3,, n )
( 2) 解 Qx = y
1 q1 1 q2 1 qn 1 1
x1 y1 x2 = y2 x y n n
得
xn = y n
xi = yi qi xi +1
i = n 1 , , 2 ,1
作业: P50 习题11
§2-4
追赶法(Thomas算法 算法) 追赶法 算法
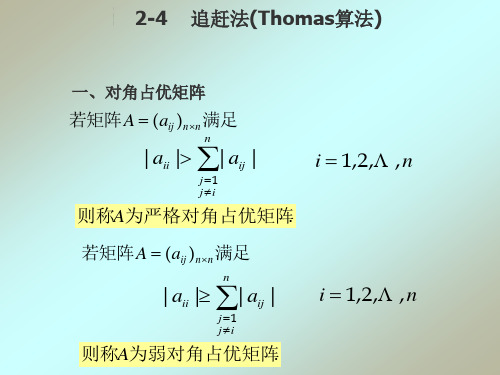
一、对角占优矩阵
若矩阵A = ( aij )n× n 满足
|aii |> ∑|aij |
j =1 j ≠i ≠i
n
i = 1 , 2 , , n
则称A为严格对角占优矩阵.
若矩阵A = ( aij )n× n 满足
|aii | ∑|aij | ≥
j =1 j ≠i
n
i = 1 , 2 , , n
则称A为弱对角占优矩阵.
matlab追赶法解101阶三对角方程组
在探讨MATLAB追赶法解101阶三对角方程组之前,我们首先需要了解什么是追赶法和什么是三对角方程组。
追赶法又称托马斯算法,是一种用于求解带状矩阵(即只有主对角线和两条相邻的对角线上有非零元素的矩阵)的线性方程组的方法。
而三对角矩阵就是只有主对角线和两条相邻的对角线上有非零元素的矩阵。
在实际应用中,求解带状矩阵的线性方程组是非常常见的,特别是在数值计算和科学工程领域。
现在,让我们深入探讨MATLAB追赶法解101阶三对角方程组的方法和具体步骤。
一、MATLAB追赶法解101阶三对角方程组1. 概念介绍101阶三对角方程组是一个非常大的线性方程组,通常使用传统的高斯消元法来求解会耗费大量的时间和计算资源。
而MATLAB追赶法通过利用三对角矩阵的特殊性质,可以有效地简化计算过程,并且节省大量的内存和计算资源。
2. 追赶法步骤(1)将原方程组化为追赶法所需的形式;(2)利用追赶法求解三对角线性方程组。
二、追赶法求解101阶三对角方程组的实现过程1. 将原方程组化为追赶法所需的形式对于101阶三对角方程组,我们首先需要将其化为追赶法所需的形式。
这个过程涉及到选取合适的追赶元和追赶子以及对原方程组的变形,将其化为追赶法能够直接处理的形式。
2. 利用追赶法求解线性方程组一旦将原方程组化为追赶法所需的形式,我们就可以利用追赶法对其进行求解。
追赶法的核心是通过追赶子的迭代计算,逐步求得线性方程组的解。
在MATLAB中,可以使用内置的追赶法求解函数,也可以编写自定义的追赶法算法来实现对101阶三对角方程组的求解。
三、个人观点和理解在实际工程和科学计算中,追赶法是一种非常有效的求解带状矩阵线性方程组的方法。
对于大规模的三对角方程组,特别是高阶的情况,传统的直接求解方法往往会遇到内存和计算资源的限制,而追赶法能够通过精巧的迭代计算,在保证解的精度的显著提高计算效率。
在MATLAB中,通过调用内置的追赶法函数,可以快速地求解大规模的三对角方程组,极大地方便了工程实践中的数值计算工作。
使用Matlab进行光线追踪的技巧探究
使用Matlab进行光线追踪的技巧探究引言光线追踪是计算机图形学领域的重要技术之一,它用于模拟光线在场景中的传播和反射,从而生成逼真的图像。
Matlab是一款强大的科学计算软件,也能够应用于光线追踪。
本文将探究使用Matlab进行光线追踪的一些技巧,帮助读者更好地理解和应用该技术。
光线追踪基础在进行光线追踪之前,我们首先需要了解光线追踪的基础知识。
光线追踪模拟光线从相机或观察者处发出,经过场景中的物体进行反射、折射和吸收,并最终到达像素点。
为了实现光线追踪,我们需要考虑以下几个步骤:1. 发射光线:从相机或观察者处发射出光线,确定其起始点和方向。
2. 相交测试:判断光线是否与场景中的物体相交,以及相交点的位置。
3. 着色计算:对相交点进行着色计算,确定该点的颜色和亮度。
4. 反射和折射:根据物体的材质属性,计算光线的反射和折射方向。
5. 阴影计算:判断相交点是否处于阴影中,以及阴影对光照的影响。
6. 光线追踪终止条件:当光线没有继续被反射或折射,或达到最大追踪深度时,终止追踪。
这些步骤依次进行,直到所有像素点都被追踪并计算出颜色值,最终生成一幅逼真的图像。
在Matlab中,我们可以利用其强大的计算和可视化功能来实现光线追踪算法。
光线与物体相交的数学模型相交测试是光线追踪中的一个关键步骤。
我们需要根据场景中的物体形状和位置,以及光线的起始点和方向,计算出光线与物体相交的点。
对于球体而言,我们可以使用方程(x-xc)^2 + (y-yc)^2 + (z-zc)^2 = r^2来表示球体表面上的点的位置,其中(xc, yc, zc)是球心的坐标,r是球的半径。
通过求解该方程,我们可以得到光线与球体相交的点的坐标。
对于平面而言,我们可以使用方程 Ax + By + Cz + D = 0 来表示平面的方程,其中(A, B, C)是平面的法向量,D是平面方程的常量。
通过将光线的参数方程带入平面方程,我们可以求解出光线与平面相交的点的坐标。
如何使用Matlab技术进行目标跟踪

如何使用Matlab技术进行目标跟踪目标跟踪是计算机视觉领域的一个重要研究方向,其核心任务是在给定图像或视频序列中准确地检测和跟踪特定的目标。
目标跟踪在许多实际应用中具有广泛的应用,例如视频监控、自动驾驶和机器人导航等。
本文将介绍如何使用Matlab技术进行目标跟踪的基本流程和方法。
首先,目标跟踪的第一步是目标检测,即在图像或视频帧中找到目标所在的位置。
Matlab提供了丰富的图像处理函数和工具箱,可以实现目标检测的各种方法。
常用的目标检测算法包括基于颜色、纹理、形状和深度学习等。
这些算法可以通过Matlab的函数进行实现和比较。
例如,通过使用颜色空间转换函数和像素级分割算法,可以从图像中提取目标的颜色信息,并进行二值化处理以得到目标的位置。
接下来,目标跟踪的第二步是目标跟踪算法的选择和实现。
Matlab提供了各种目标跟踪算法的函数和工具箱,包括基于特征的跟踪算法和基于深度学习的跟踪算法等。
基于特征的跟踪算法通过提取目标的特征向量,并结合目标的位置信息进行跟踪。
这些特征可以包括目标的颜色、纹理、形状和运动等。
通过使用Matlab提供的函数和工具箱,可以实现这些特征的提取和跟踪算法的实现。
此外,基于深度学习的目标跟踪算法是近年来发展的热点研究方向,它利用深度神经网络模型提取和学习图像的高层语义特征,实现更加准确和鲁棒的目标跟踪。
Matlab提供了深度学习工具箱,可以方便地构建和训练深度神经网络模型,并将其应用于目标跟踪任务。
通过将图像序列输入深度神经网络,可以实现对目标的实时跟踪和预测。
不仅如此,还可以通过Fine-tuning等技术来提升目标跟踪算法的性能和泛化能力。
进一步,目标跟踪的第三步是跟踪效果的评估和改进。
为了评估目标跟踪算法的性能,需要选择合适的评价指标和测试数据集。
在Matlab中,可以使用各种评价指标函数和相关工具箱来计算跟踪准确度、漏检率和错误率等。
通过与其他跟踪算法进行比较和分析,可以发现目标跟踪算法的优势和不足之处,并针对性地进行改进和优化。
matlab运动目标检测算法解析

一、概述在当今世界,随着科技的飞速发展,运动目标检测技术在诸多领域中得到了广泛的应用,如人脸识别、智能监控、自动驾驶等。
Matlab作为一种高效的科学计算软件,其丰富的功能和强大的算法使其成为了运动目标检测领域的重要工具。
本文将重点解析Matlab中的运动目标检测算法,为读者详细介绍其原理和实现方法。
二、Matlab运动目标检测算法概述1. 运动目标检测的概念和意义运动目标检测是指利用计算机视觉和图像处理技术,对运动中的目标进行自动检测和跟踪。
该技术在视瓶监控、智能交通等领域具有重要的应用价值,可以提高工作效率、减少人力成本,同时也可以提供实时的监控和预警功能。
2. Matlab运动目标检测算法的分类在Matlab中,运动目标检测算法可以大致分为基于光流的方法和基于背景建模的方法两大类。
基于光流的方法主要通过计算图像中相邻帧像素之间的运动关系来实现目标检测,而基于背景建模的方法则是通过建立静态背景模型,来检测出运动目标。
三、基于光流的运动目标检测算法1. 光流的定义和原理光流是指图像中每个像素点在连续帧之间的运动矢量。
基于光流的运动目标检测算法通过计算相邻帧图像之间的光流场,从而实现目标的检测和跟踪。
2. 光流算法在Matlab中的实现Matlab提供了丰富的光流算法库,如Lucas-Kanade光流、Horn-Schunck光流等。
这些算法可以通过Matlab编程实现,对视瓶中的运动目标进行快速而准确的检测。
3. 光流算法的优缺点光流算法能够对目标的细微运动进行精确检测,但也存在着对光照变化和纹理模糊的敏感性。
基于光流的算法在复杂背景下容易出现跟踪丢失的问题,因此在实际应用中需要综合考虑。
四、基于背景建模的运动目标检测算法1. 背景建模算法的定义和原理背景建模算法是指通过建立图像序列中的静态背景模型,来实现对运动目标的检测。
该算法在Matlab中得到了广泛的应用,如Gaussian Mixture Model(GMM)、K-Nearest Neighbor(KNN)等。
matlabnewton-raphson method

matlabnewton-raphson method如何使用MATLAB 实现牛顿-拉夫逊方法引言:牛顿-拉夫逊方法是一种用于求解非线性方程的数值方法,在科学计算和工程领域具有广泛的应用。
在MATLAB 中,我们可以利用其强大的数值计算能力轻松实现这一方法。
本文将一步一步介绍如何使用MATLAB 实现牛顿-拉夫逊方法,帮助读者更好地理解和运用该方法。
第一步:问题建模和方程确定在使用牛顿-拉夫逊方法之前,我们首先需要建立一个数学模型并确定需要求解的方程。
我们假设我们试图解决的方程为F(x) = 0,其中x是需要求解的变量。
为了使用牛顿-拉夫逊方法,我们需要确定该方程的导数F'(x)。
在MATLAB 中,我们可以通过定义一个函数来表示方程F(x)和其导数F'(x)。
下面是一个简单的示例:MATLABfunction [F, dF] = equation(x)F = x^2 - 2; 示例方程为x^2 - 2 = 0dF = 2*x; 方程的导数为2*xend在这个示例中,我们定义了一个名为equation的函数,该函数接收一个变量x作为输入,并返回方程F(x)和其导数F'(x)的值。
请注意,这只是一个示例,实际问题中的方程和导数可能更加复杂。
第二步:实现牛顿-拉夫逊迭代算法在确定了方程和导数之后,我们可以开始实现牛顿-拉夫逊迭代算法。
该算法的基本思想是从一个初始猜测值x0开始,通过不断迭代来逼近方程的根。
迭代的过程可以通过以下公式表示:x(i+1) = x(i) - F(x(i)) / F'(x(i))在MATLAB 中,我们可以使用一个循环来实现这个迭代过程。
下面是一个使用牛顿-拉夫逊方法求解方程的示例:MATLABfunction x = newtonRaphson(x0, maxIter, epsilon)x = x0;for iter = 1:maxIter[F, dF] = equation(x);if abs(F) < epsilonbreak;endx = x - F / dF;endend在这个示例中,我们定义了一个名为newtonRaphson的函数,该函数接收一个初始猜测值x0、最大迭代次数maxIter和收敛条件epsilon作为输入,并返回牛顿-拉夫逊方法计算得到的根x。
如何在Matlab中进行目标跟踪

如何在Matlab中进行目标跟踪简介:目标跟踪是计算机视觉和图像处理领域的重要研究方向之一。
在实际应用中,如视频监控、无人驾驶等领域,目标跟踪技术发挥着重要的作用。
本文将介绍如何在Matlab中进行目标跟踪,探讨目标跟踪的基本概念、常用方法以及Matlab中的相关工具和函数。
一、目标跟踪的基本概念目标跟踪是指通过计算机对一个或多个目标进行连续性的跟踪和位置估计。
目标跟踪的基本任务是确定目标在连续帧中的位置和形状,实现对目标的实时追踪。
在目标跟踪中,关键的挑战是目标的外观变化、遮挡以及光照条件的改变。
因此,研究人员提出了多种不同的目标跟踪算法,包括传统的基于特征匹配和模型预测的方法,以及近年来发展起来的基于深度学习的方法。
二、常用的目标跟踪方法1. 基于模板匹配的方法基于模板匹配的目标跟踪方法首先需要在初始帧中手动选择目标,并用一个固定大小的矩形框进行表示。
然后,通过计算目标模板和每一帧图像块的相似度来确定目标在下一帧中的位置。
Matlab中提供了一些内置函数来实现基于模板匹配的目标跟踪,如corr2和normxcorr2。
这些函数可以计算两个矩阵之间的相关系数或归一化的互相关系数,从而得到目标的位置信息。
2. 基于特征的方法基于特征的目标跟踪方法通过提取目标的特征,如颜色、纹理、边缘等,来进行目标的跟踪。
在Matlab中,可以使用一些图像处理工具箱中的函数来提取目标的特征。
例如,可以使用imhist函数计算图像的直方图,然后通过比较不同帧中目标的直方图来进行跟踪。
3. 基于深度学习的方法近年来,基于深度学习的目标跟踪方法取得了显著的进展。
这些方法利用深度神经网络来提取图像的特征,并通过学习目标的外观模型来实现目标的跟踪。
在Matlab中,可以使用深度学习工具箱来实现基于深度学习的目标跟踪。
例如,可以使用卷积神经网络(CNN)来提取图像的特征,并通过训练一个分类器来完成目标的跟踪。
三、Matlab中的目标跟踪工具和函数除了上述介绍的方法外,Matlab还提供了一些专门用于目标跟踪的工具和函数。
Matlab中的目标跟踪技术

Matlab中的目标跟踪技术目标跟踪技术是计算机视觉领域的一个重要研究方向,它涉及到对象在图像或视频序列中的自动定位和追踪。
目标跟踪技术在许多领域都有着广泛的应用,例如视频监控、无人驾驶、智能交通等。
在目标跟踪技术中,Matlab是一种常用的工具,它提供了丰富的图像处理和计算机视觉函数,方便了目标跟踪算法的实现和测试。
一、目标跟踪概述目标跟踪是指在图像或视频序列中自动定位和追踪感兴趣对象的过程。
目标跟踪面临许多挑战,例如目标形状和尺寸的变化、光照变化、遮挡等。
因此,设计有效的目标跟踪算法是一个复杂而有挑战性的问题。
二、基于颜色的目标跟踪颜色是一种常用的目标特征,因为它在图像中比较容易提取。
在Matlab中,可以使用颜色直方图来表示目标的颜色特征。
通过计算目标颜色直方图和图像每个像素的颜色直方图之间的差别,可以判断目标的位置。
同时,可以使用卡尔曼滤波器来对目标位置进行预测和更新,从而实现实时目标跟踪。
三、基于特征点的目标跟踪特征点是图像中具有独特性质并且相对稳定的点,例如角点、边缘点等。
在Matlab中,可以使用SIFT、SURF等算法来提取图像的特征点,并通过匹配特征点来进行目标跟踪。
通过计算特征点之间的相对位置和方向变化,可以估计目标的运动轨迹。
同时,可以使用光流估计算法来对目标的速度进行估计和更新。
四、基于深度学习的目标跟踪深度学习是一种强大的机器学习方法,在目标跟踪领域也取得了很多突破。
在Matlab中,可以使用深度学习框架来构建和训练目标跟踪模型。
常用的深度学习模型包括卷积神经网络(CNN)、循环神经网络(RNN)等。
通过输入图像序列和目标的初始位置,可以通过深度学习模型来预测目标的下一帧位置,从而实现目标跟踪。
五、目标跟踪的评价指标评价目标跟踪算法的性能是非常重要的。
在Matlab中,可以使用多种评价指标来评估目标跟踪算法的准确性和效率。
常用的评价指标包括精确度、鲁棒性、计算速度等。
通过对不同目标跟踪算法的评估,可以选择最合适的算法来应用于实际场景。
高斯消去、追赶法matlab

⾼斯消去、追赶法matlab 1. 分别⽤Gauss消去法、列主元Gauss消去法、三⾓分解⽅法求解⽅程组程序:(1)Guess消去法:function x=GaussXQByOrder(A,b)%Gauss消去法N = size(A);n = N(1);x = zeros(n,1);for i=1:(n-1)for j=(i+1):nif(A(i,i)==0)disp('对⾓元不能为0');return;endm = A(j,i)/A(i,i);A(j,i:n)=A(j,i:n)-m*A(i,i:n);b(j)=b(j)-m*b(i);endendx(n)=b(n)/A(n,n);for i=n-1:-1:1x(i)=(b(i)-sum(A(i,i+1:n)*x(i+1:n)))/A(i,i);end命令⾏输⼊:A=[1 -1 2 1;-1 3 0 -3 ;2 0 9 -6;1 -3 -6 19];b=[1 3 5 7];b=b';x=GaussXQByOrder(A,b)运算结果:x =-8.0000000000000000.3333333333333333.6666666666666672.000000000000000(2)列主元Gauss消去法程序:function x=GaussXQLineMain(A,b)%列主元Gauss消去法N = size(A);n = N(1);x = zeros(n,1);zz=zeros(1,n);for i=1:(n-1)[~,p]=max(abs(A(i:n,i)));zz=A(i,:);A(i,:)=A(p+i-1,:);A(p+i-1,:)=zz;temp=b(i);b(i)=b(i+p-1);b(i+p-1)=temp;for j=(i+1):nm = A(j,i)/A(i,i);A(j,i:n)=A(j,i:n)-m*A(i,i:n);b(j)=b(j)-m*b(i);endendx(n)=b(n)/A(n,n);for i=n-1:-1:1x(i)=(b(i)-sum(A(i,i+1:n)*x(i+1:n)))/A(i,i);end命令⾏:A=[1 -1 2 1;-1 3 0 -3 ;2 0 9 -6;1 -3 -6 19];b=[1 3 5 7];b=b';x=GaussXQLineMain(A,b)运⾏结果:x =-8.0000000000000050.3333333333333323.6666666666666682.000000000000000(3)三⾓分解⽅法程序:function x = LU(A,b)%三⾓分解N = size(A);n = N(1);L = eye(n,n);U = zeros(n,n);x = zeros(n,1);y = zeros(n,1);U(1,1:n) = A(1,1:n);L(1:n,1) = A(1:n,1)/U(1,1);for k=2:nfor i=k:nU(k,i) = A(k,i)-L(k,1:(k-1))*U(1:(k-1),i);endfor j=(k+1):nL(j,k) = (A(j,k)-L(j,1:(k-1))*U(1:(k-1),k))/U(k,k); endendy(1)=b(1)/L(1,1);for i=2:ny(i)=b(i)-sum(L(i,1:i-1)*y(1:i-1));endx(n)=y(n)/U(n,n);for i=n-1:-1:1x(i)=(y(i)-sum(U(i,i+1:n)*x(i+1:n)))/U(i,i);end命令⾏:A=[1 -1 2 1;-1 3 0 -3 ;2 0 9 -6;1 -3 -6 19];b=[1 3 5 7];b=b';x=LU(A,b)运⾏结果:x =-8.0000000000000000.3333333333333333.6666666666666672.000000000000000程序:function [times,wucha]=zhuiganfa(a,b,c,f)%追赶法:x为所求解,times为所有乘除运算次数(即时间),wucha为误差的2-范数。
Matlab学习系列30.理想解法(TOPSIS)法

30. 理想解法(TOPSI S )法一、基本原理TOPSI S 法是一种综合评价方法,其基本原理是:(1) 将n 个评价指标看成n 条坐标轴,由此可以构造出一个n 维空间,则每个待评价的对象依照其各项指标的数据就对应n 维空间中一个坐标点;(2) 针对各项指标从所有待评价对象中选出该指标的最优值(理想解,对应最优坐标点)和最差值(负理想解,对应最差坐标点),依次求出各个待评价对象的坐标点分别到最优坐标点和最差坐标点的距离*d 和0d(3) 构造评价参考值00*d f d d =+ 则值越大代f 表评价结果越优。
二、算法步骤1. 构造决策矩阵()ij m n A a ⨯=,每一列是一个评价指标,每一行是一条待评价样本;为去掉量纲效应,做规范化处理得到()ij m n B b ⨯=,其中1,,, 1,,ij b a i m j n ===注:该规范化法处理后,各评价样本的同一评价指标值的平方和为1, 适合TOP S IS 法中计算欧氏距离的场合。
2. 根据每个评价指标对评价结果的贡献程度的不同,指定不同的权重:1[,,]n w w w = ,将B 的第j 列乘以其权重j w ,得到加权规范矩阵()ij m n C c ⨯=3. 确定正理想解和负理想*C 解0C***00011[,,], [,,]n n C c c C c c ==其中,*max , min ij i jij i c j c c j ⎧⎪=⎨⎪⎩若第评价指标是正向指标(值越大越好),若第评价指标是负向指标(值越小越好),1,,j n = 0min , max ij i jij i c j c c j ⎧⎪=⎨⎪⎩若第评价指标是正向指标(值越大越好),若第评价指标是负向指标(值越小越好),1,,j n = 4. 计算每个待评价样本到正理想解和负理想解的距离*i d 和0i d*1,,i d i m ==1,,i d i m =5. 计算每个待评价样本的评价参考值00*, 1,,i i i i d f i m d d ==+ 再将从大到i f 小排列,得到各评价样本的优劣结果。
用matlab求解超越方程的方法

用matlab求解超越方程的方法Matlab作为一款强大的数学软件,可以帮助我们比较轻松地解决超越方程,提供了一个快速、灵活且可靠的求解超越方程的方法。
Matlab是一种流行的计算机软件,它拥有强大的数值分析能力。
它经常用来求解复杂的函数方程,特别是有关超越方程的计算。
本文介绍使用Matlab求解超越方程的几种方法:一、用数值方法求解1、采用有限差分法(Finite Difference Method)Finite Difference Method(FDM)是以在离散的网格上对变量的数值求解来实现的。
FDM可以有效的求解多维、非线性的超越方程。
通过在网格上求解多次,可以找出方程的根。
2、采用拉格朗日插值法(Lagrange Interpolation)Lagrange Interpolation是一种数学插值方法,可以有效地解决超越方程中多维非线性方程组。
其运算速度快、精度高,且可以有效求解实际问题中出现的复杂超越方程。
二、用几何方法求解1、采用图像法(Graphics Method)使用图像法可以可视化超越方程。
当然,由于超越方程具有多个变量,因此采用图像法进行求解的难度较大。
但由于图像简单明了,它仍然是一种有效的计算方法。
2、采用微分几何(Differential Geometry)Differential Geometry是一种在曲面上进行计算的数学方法。
它有助于求解超越方程,尤其是表达形式为系统多元不等式的超越方程。
总结:Matlab是一种强大的计算软件,可以用来求解超越方程。
它有许多方法可以用于求解超越方程,包括:用数值方法求解、用几何方法求解等。
它能帮助我们解决复杂的科学问题,因此得到了广泛的应用。
matlab中的一些经典算法
matlab中的一些经典算法在MATLAB中,有许多经典算法可以用于各种数学和工程问题。
以下是一些常见的经典算法:1. 最小二乘法(Least Squares Method),用于拟合数据和解决过定系统的线性方程组。
MATLAB中的`polyfit`和`lsqcurvefit`函数可以实现最小二乘拟合。
2. 快速傅里叶变换(Fast Fourier Transform, FFT),用于信号处理和频域分析。
MATLAB中的`fft`函数可以对信号进行快速傅里叶变换。
3. 线性规划(Linear Programming),用于优化问题的求解,例如最大化/最小化线性目标函数的线性约束问题。
MATLAB中的`linprog`函数可以用于线性规划求解。
4. 非线性最小二乘法(Nonlinear Least Squares),用于拟合非线性模型到数据。
MATLAB中的`lsqnonlin`函数可以用于非线性最小二乘拟合。
5. 最优化算法(Optimization Algorithms),MATLAB提供了许多优化算法,包括梯度下降、共轭梯度、拟牛顿等算法,用于解决无约束和约束优化问题。
6. 插值算法(Interpolation),MATLAB中的`interp1`和`interp2`函数可以用于一维和二维数据的插值。
7. 微分方程求解(Differential Equation Solving),MATLAB中的`ode45`和`ode15s`等函数可以用于求解常微分方程和偏微分方程。
8. 图像处理算法(Image Processing Algorithms),MATLAB提供了丰富的图像处理工具箱,包括滤波、边缘检测、图像分割等经典算法。
以上列举的算法只是 MATLAB 中众多经典算法的一小部分,它们在数学建模、信号处理、优化、图像处理等领域有着广泛的应用。
希望这些信息能够帮助到你。
追赶法(Thomas算法)

定理1:满足引理1条件的三对角方阵A有如下形式的 唯一的克劳特分解。
p1 a2 p2
1 q1
1 q2A Nhomakorabea
a3 pn1
an
pn
=PQ
1 qn1
1
其中
qpi1
b1 ci
pi
i 1,2,, n 1
得
xi yi qi xi1
i n 1,,2,1
作业:
P50 习题11
感谢您的下载让小编的努力能帮助到您, 最后一页是小编对你的谢谢哦,提醒一下, 下载好了几个全部自己看一遍,把用不上 的删除哦!包括最后一页!
yi fi ai yi1 / pi i 2,3,, n
(2) 解Qx y
1
q1 1
q2
1
qn1
1
x1 x2
y1 y2
xn yn
xn yn
pi
bi
aiqi1
i 2,3,, n
解三对角线方程组 Ax f可化为求解两个三角形 方程组
Py f Qx y
(1) 解Py f
p1
f1
a2 p2
f2
(P, f )
a3
f3
pn1 an
pn
f
n
得
y1 f1 / p1
matlabnewton-raphson method -回复
matlabnewton-raphson method -回复如何使用MATLAB 实现牛顿-拉夫逊法?牛顿-拉夫逊法是一种用于求解非线性方程和优化问题的迭代方法。
它利用函数的一阶导数和二阶导数来逼近方程的根或者达到最小值。
在MATLAB 中,我们可以使用牛顿-拉夫逊法来解决各种数学问题,包括求解非线性方程、寻找最小值或最大值等问题。
在这篇文章中,我将逐步介绍如何使用MATLAB 实现牛顿-拉夫逊法,并给出一些示例来帮助读者更好地理解这个过程。
本文所涉及的内容包括函数定义、初始点的选择、迭代公式的推导和MATLAB 代码的编写。
首先,让我们来定义一个函数,以便说明如何使用牛顿-拉夫逊法。
我们将使用以下函数作为示例:function y = my_func(x)y = x^3 - 5*x^2 + 2*x - 9;end在这个示例函数中,我们需要求解方程my_func(x) = 0 的根。
接下来,我们需要选择一个初始点作为我们的迭代起点。
初始点的选择可能会影响到算法的收敛性和计算结果的准确性。
我们可以选择任何一个符合实际要求的数值作为初始点。
在这个示例中,我们选择x0 = 2 作为初始点。
现在,让我们推导牛顿-拉夫逊法的迭代公式。
迭代公式可以通过泰勒级数展开来得到。
我们首先使用一阶导数来逼近函数的变化,并忽略高阶项。
然后,我们将这个近似值代入原方程,得到一个更简单的方程。
最后,我们使用这个方程求解新的近似解,并将该解作为下一次迭代的初始点。
这个过程不断重复,直到我们达到求解方程的精度。
在MATLAB 中,我们可以使用以下代码来实现牛顿-拉夫逊法的迭代公式:matlabfunction [x, iterations] = newton_raphson(func, x0, epsilon,max_iterations)syms x;df = diff(func, x); 计算函数的一阶导数ddf = diff(df, x); 计算函数的二阶导数iterations = 0;while abs(subs(func, x, x0)) > epsilon && iterations <max_iterationsx0 = x0 - subs(func, x, x0)/subs(df, x, x0); 迭代公式iterations = iterations + 1;endif abs(subs(func, x, x0)) <= epsilonx = x0;elsex = NaN; 如果超过最大迭代次数还未收敛,则返回NaN endend在这个函数中,我们将输入的函数`func` 转换为符号表达式,并使用`diff` 函数来计算函数的一阶导数`df` 和二阶导数`ddf`。
MATLAB技术多目标跟踪方法
MATLAB技术多目标跟踪方法概述随着计算机视觉技术的快速发展,多目标跟踪在实时监控、自动驾驶和安防等领域中扮演着重要角色。
MATLAB作为一种强大的科学计算软件,提供了丰富的图像处理和机器学习工具,为多目标跟踪提供了便捷的解决方案。
本文将介绍一些基于MATLAB的多目标跟踪方法,并深入探讨其在实际应用中的优点和挑战。
一、单目标跟踪与多目标跟踪的区别在开始介绍MATLAB技术多目标跟踪方法之前,有必要先了解单目标跟踪和多目标跟踪的区别。
单目标跟踪是指将摄像机中的一个目标或者特定区域中的一个物体进行跟踪,而多目标跟踪则是指同时跟踪多个目标。
多目标跟踪的难点在于处理目标之间的相互遮挡、尺度变化和形变等问题。
二、基于背景建模的多目标跟踪方法背景建模是多目标跟踪中常用的方法之一。
它利用摄像头采集的连续帧图像,建立图像序列的背景模型,然后通过比较当前帧图像与背景模型的差异来判断是否存在新的目标。
MATLAB提供了多种背景建模算法,如基于高斯混合模型(Gaussian Mixture Model, GMM)和基于自适应背景模型(Adaptive Background Model)等。
这些算法可以灵活地应用于各种场景,但在处理目标遮挡和光照变化等问题时仍然存在一定的挑战。
三、基于特征提取和匹配的多目标跟踪方法除了背景建模,还可以利用特征提取和匹配的方法来进行多目标跟踪。
MATLAB中的计算机视觉工具箱提供了多种特征提取算法,如边缘检测、角点检测和尺度不变特征变换(Scale-Invariant Feature Transform, SIFT)等。
通过提取目标的特征,并使用机器学习算法进行特征匹配,可以实现目标的跟踪。
然而,由于特征提取和匹配过程的复杂性,这种方法在实时性和准确性上仍然面临着一定的挑战。
四、基于深度学习的多目标跟踪方法近年来,深度学习在计算机视觉领域取得了巨大的突破,也为多目标跟踪提供了新的思路。