基于MATLAB的曲柄摇杆机构优化设计
基于matlab的连杆机构设计
基于matlab的连杆机构设计————————————————————————————————作者: ————————————————————————————————日期:目录1平面连杆机构的运动分析 (1)1.2 机构的工作原理 (1)1.3机构的数学模型的建立 (1)1.3.1建立机构的闭环矢量位置方程...................................................11.3.2求解方法.....................................................................22基于MATLAB程序设计 (4)2.1 程序流程图 (4)2.2 M文件编写 (6)2.3程序运行结果输出 (7)3 基于MATLAB图形界面设计 (11)3.1界面设计……………………………………………………………………………………………113.2代码设计……………………………………………………………………………………………124 小结 (17)参考文献 (18)1平面连杆机构的运动分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
基于MATLAB的双摇杆机构运动分析与仿真

基于MATLAB的双摇杆机构运动分析与仿真双摇杆机构是一种常见的机械系统,由两个摇杆组成,通过摇杆的运动来实现转换。
在本文中,我们将基于MATLAB对双摇杆机构进行运动分析与仿真。
首先,我们需要确定双摇杆机构的几何参数。
主要包括摇杆长度、连接点位置、连接点角度等。
假设双摇杆机构的摇杆长度分别为L1和L2,连接点之间的距离为d,连接点1的坐标(x1,y1)和连接点2的坐标(x2,y2),摇杆1和水平方向的夹角为θ1,摇杆2和水平方向的夹角为θ2根据几何原理,可以得到连接点位置之间的关系:x2 = x1 + L1 * sin(θ1) + L2 * sin(θ2)y2 = y1 + L1 * cos(θ1) + L2 * cos(θ2)接下来,我们可以使用MATLAB进行双摇杆机构的运动分析。
首先,我们需要定义一段时间内摇杆1和摇杆2的角度变化情况,可以使用一个时间向量t和对应的角度向量θ1和θ2来表示。
然后,根据上一步中得到的连接点坐标的关系式,可以计算出连接点的运动轨迹。
通过绘制连接点的运动轨迹,我们可以观察到双摇杆机构的运动情况。
以下是一个MATLAB代码示例,用于计算双摇杆机构的运动轨迹并进行绘制:```matlabL1=1;%摇杆1长度L2=2;%摇杆2长度d=0.5;%连接点之间的距离x1=0;%连接点1的横坐标y1=0;%连接点1的纵坐标t=0:0.01:10;%时间向量theta1 = pi/6*sin(t); % 摇杆1的角度变化theta2 = pi/4*sin(t); % 摇杆2的角度变化x2 = x1 + L1 * sin(theta1) + L2 * sin(theta2);y2 = y1 + L1 * cos(theta1) + L2 * cos(theta2);plot(x2, y2);xlabel('X');ylabel('Y');title('Double Crank Mechanism');```运行以上代码,即可得到双摇杆机构的运动轨迹图像。
优化设计-曲柄摇杆机构优化设计

优化设计-曲柄摇杆机构优化设计优化设计-曲柄摇杆机构优化设计1:引言1.1 背景在机械工程中,曲柄摇杆机构是常用的传动机构之一,具有转动-直线运动转换的功能。
然而,由于曲柄摇杆机构的结构复杂性以及不同工况下的性能要求,如何对曲柄摇杆机构进行优化设计成为一项重要的工作。
1.2 目的本文旨在对曲柄摇杆机构进行优化设计,以提高其运动精度、工作效率和使用寿命。
2:功能需求分析2.1 运动要求根据使用场景和应用需求,分析曲柄摇杆机构需要实现的运动要求,包括速度、加速度、行程等方面的要求。
2.2 负载要求确定曲柄摇杆机构在工作过程中所承受的负载要求,包括静载荷和动载荷。
2.3 精度要求根据实际应用场景,分析曲柄摇杆机构需要达到的运动精度要求,如定位精度、重复定位精度等。
3:结构设计优化3.1 曲柄摇杆机构的结构形式选择根据运动要求和负载要求,结合现有的曲柄摇杆机构结构形式,选择合适的结构形式来满足设计要求。
3.2 关键部件的优化设计对曲柄摇杆机构的关键部件进行优化设计,如曲柄轴、摇杆、连杆等,提高其强度和刚度,减小重量和惯性。
4:润滑与密封设计4.1 润滑系统设计根据工作条件和运动要求,设计曲柄摇杆机构的润滑系统,确保关键部件的摩擦副有足够的润滑。
4.2 密封设计对曲柄摇杆机构的关键部位进行密封设计,防止润滑剂泄漏或外界杂质进入,保证机构的工作正常。
5:动力学分析与优化5.1 运动学分析通过运动学分析,研究曲柄摇杆机构的运动规律和轨迹,为后续的动力学分析提供基础。
5.2 动力学分析根据负载要求和运动要求,进行曲柄摇杆机构的动力学分析,考虑受力分布和扭矩传递,优化曲柄摇杆机构的结构参数和材料选择。
6:工艺制造优化6.1 工艺优化针对曲柄摇杆机构的结构特点和制造工艺要求,进行工艺优化,提高制造精度和工艺可行性。
6.2 制造工艺选择根据实际情况,选择适合曲柄摇杆机构的制造工艺,如铸造、锻造、加工等。
7:仿真与试验验证7.1 仿真分析使用计算机辅助工程技术,对曲柄摇杆机构进行有限元分析、动力学仿真等,验证优化设计方案的可行性。
基于MATLAB的曲柄摇杆串RRP型Ⅱ级杆组平面六杆机构的运动分析

加速度的运动规律线图。
关键词:六杆机构;运动分析;MA,IIAB 中图分类号:7I玛91文献标志码:A文章编号:1003—0794(2008)02.0073.03
Kinematical Analysis of Plane Crank Jigging Rod Connect to RRP
ⅡLevel of Group Mechanism Using MATLAB
分析。曲柄1转动角度叭连杆2转动角度臼及摇 常数,对式(2)求时间导数,得到连杆2的角速度09,:
万方数据
一73—
.巡:垫№:兰 .基主丛坚幽塑些煎鲎堑童婴型壁堡盘堑垩亘盔堑垫煎笪重塾坌堑==堑塑墓:簦 箜罂鲞箜兰塑一
及摇杆3角速度∞,,方程式如下
lor i=l:72
8iconsL
8
。二L【一 -一L2:2Csoins 0 LL3,3Csions艿艿艿].儿f叫三i1】J=【‘cL止oLll cos三∞ 】。Jc… 6,
针对常用的一种平面六杆机构为了了解其各个构件在不同时刻的运动参数以及运动曲线本文通过在二维直角坐标系中建立其位置速度加速度复数位置方程借助强大的matlab软件求解方程并利用c语言编程实现时域内各个构件的瞬时参数的数值求解及可视化并将数据导入excel中进行参数曲线绘制即可很形象的得到各个构件的运动参数变化规律及相关的临界状态从而使该机构的运动分析变得简单精确为机构的动力学分析提供了基础
基于MATLAB的双曲柄五杆移栽机构运动学仿真及优化设计

基于MATLAB的双曲柄五杆移栽机构运动学仿真及优化设计作者:程志广李健来源:《科技视界》2018年第12期【摘要】本文建立了双曲柄五杆机构的数学模型,运用多目标优化函数对双曲柄五杆机构进行优化设计,采用MATLAB进行编程计算,得到了栽植点速度加速度、曲柄半径、机架杆长度、主副曲柄相位角差等主要结构参数之间的变化关系,并获得一组最优解。
从而为后期机构的研制、秧苗移栽直立度和薄膜刮伤试验提供了理论依据。
【关键词】钵苗移栽;多目标优化;运动学仿真中图分类号: S223 文献标识码: A 文章编号: 2095-2457(2018)12-0072-002DOI:10.19694/ki.issn2095-2457.2018.12.0310 引言移栽技术在提高作物生长的抗灾抗逆能力、保证作物稳产增产和提高产品品质等方面起着很大作用。
然而进行膜上移栽作业时存在栽植器鸭嘴末端容易刮伤地膜、直立度低等问题,影响了移栽技术在农业生产中的广泛应用[1-2]。
故本文以平面多杆机构鸭嘴式栽植器为例对一种双曲柄五杆移栽机构进行优化设计和仿真分析,从而为实际机构的试验研制提供理论支撑。
1 双曲柄五杆移栽机构运动学模型及工作原理双曲柄五杆移栽机构示意图如图1所示,该移栽机构由双曲柄五杆机构及鸭嘴器组成,机构自由度为2。
其中机架为OE,曲柄OB、ED为输入构件,输出构件为连杆CD,鸭嘴器Lf 固定在CD一端。
移栽进行时曲柄OB、ED以相同角速度同向匀速运动。
当鸭嘴器在最高位置时钵苗落入鸭嘴中进行喂苗。
当鸭嘴到达最低位置时,鸭嘴器在凸轮控制系统作用下张开。
钵苗落入打好的穴口中,完成一次栽植过程。
图1 双曲柄五杆栽植机构示意图2 双曲柄五杆栽植机构运动学模型建立如图1所示,以O为原点建立直角坐标系,各杆角位移以X轴正方向为基准,逆时针为正,机组前进方向为X轴负方向[3]。
设机构中各杆件OB、AB、AD、DE、AC、OE、CF 长度分别为L0、L1、L2、L3、L4、L5,鸭嘴器长度为Lf,两曲柄初始相位角分别为ψ0、ψ3,连杆DE、CF角位移分别为ψ2、ψ4。
MATLAB的曲柄滑块和四杆机构的综合设计解析
KUNMING UNIVERSITY OF SCIENCE AND TECHNOLOGY《计算机仿真技术》课程设计报告冯叶/ 浦合旳201410302544/ 201410302547刘孝保2015年6月姓名: 学号: 专业班级: 指导教师:机械卓目录©区肌理乂殳申KUMWBG sngn OF SCIENCE MO TCCWlOGr目录1 •仿真问题描述.........................................................................2•仿真问题数学模型......................................................................3. Mat lab实现方法 .....................................................................4・Mat lab代码..........................................................................5•仿真结论..............................................................................6.遇到的问题和解决的方式.................................................................7 •课程学习意见与建议...................................................................《计算机仿真技术》课程设计报告 艮咽疗N 乂孝 ItnVH ; WmJSTY :f SCOtCE MP TOCtXCCf 1 •仿真问题描述已知机架AD 长为L1,曲柄AB 长为L2,连杆BC 长L3,另一机架长CD 长为L4,与AB 杆相 连的是一滑块E 。
曲柄连杆机构matlab课程设计

曲柄连杆机构matlab课程设计一、课程目标知识目标:1. 理解曲柄连杆机构的基本原理与运动特性;2. 掌握利用MATLAB软件进行曲柄连杆机构的运动仿真与分析;3. 学会结合实际工程案例,运用所学知识解决曲柄连杆机构的相关问题。
技能目标:1. 能够运用MATLAB软件构建曲柄连杆机构的模型;2. 能够对曲柄连杆机构进行运动分析,并绘制出相应的运动轨迹图;3. 能够根据分析结果,优化曲柄连杆机构的结构参数。
情感态度价值观目标:1. 培养学生对机械原理及MATLAB软件的兴趣,激发学习热情;2. 培养学生严谨的科学态度,注重理论与实践相结合;3. 增强学生的团队协作意识,提高沟通与表达能力。
本课程针对高年级学生,结合学科特点,注重理论知识与实践技能的结合。
通过本课程的学习,使学生能够掌握曲柄连杆机构的基本原理,运用MATLAB软件进行运动仿真与分析,培养解决实际工程问题的能力。
同时,课程强调团队合作,提升学生的综合素质,为将来的学术研究和职业发展打下坚实基础。
二、教学内容1. 曲柄连杆机构基本原理:介绍曲柄连杆机构的类型、特点及其在工程中的应用,重点讲解其运动学及动力学原理。
教材章节:第二章 曲柄连杆机构2. MATLAB软件操作:讲解MATLAB软件的基本操作,包括界面、常用命令、数据类型等,为后续运动仿真打下基础。
教材章节:第一章 MATLAB基础3. 曲柄连杆机构建模与仿真:教授如何使用MATLAB软件构建曲柄连杆机构的模型,进行运动仿真,分析运动特性。
教材章节:第三章 曲柄连杆机构建模与仿真4. 结构参数优化:介绍曲柄连杆机构结构参数对运动性能的影响,教授如何运用MATLAB软件进行参数优化。
教材章节:第四章 曲柄连杆机构优化设计5. 实际工程案例:分析典型曲柄连杆机构在实际工程中的应用,结合MATLAB软件进行案例分析,提高学生解决实际问题的能力。
教材章节:第五章 曲柄连杆机构工程应用案例教学内容安排与进度:共分为五个阶段,每个阶段2学时,共计10学时。
基于Matlab的曲柄摇杆机构参数化设计

小车前轮为转向轮,后轮为驱动轮,假设小车为一个其在固定驱动力作用下做周期运动,如图从图2可以发现,其轨迹近似为正弦曲线,小车能够通过方向控制机构-曲柄摇杆机构控制前轮周期性转向,从而绕过图中方格交点位置的障碍物。
障碍物之间的间距就可以进行优化了。
从小车简图中可以发现,核心的机构就是一个曲柄摇杆机构,小车底盘与立柱组成曲柄长度与连杆长度可以调节,它们决定了摇杆也就是前轮的摆角。
前轮为转向轮,控制整个小车的运动轨迹,所以需要对这个曲柄摇杆机构进行建模,通质点运动规律。
假设为;。
如何确定质点运动轨迹呢?自行车,若自行车前进方向不变,二者轨迹(即车轮与地面接触点的轨迹)自行车前进时前轮左右摆动,前轮可左右左转角度为正,内,后轮在t 时刻的位置用置表示。
自行车后轮旋转线速度为定值,考虑几种情况:——————————————————基金项目:天津市自然科学基金项目(18JCQNJC75200);天津市图1小车简图图2小车运动轨迹图3小车简图控制轮R基座连杆曲柄后轮R1转角前后轮中心距L才能用点,向,有关。
这样得到一个几何位置关系:其中L表示前后轮之间的距离,这是由自行车决定的,令表示后轮与前轮的方则有姿势关系:表示后轮在s时,前轮的偏转角,左转为式(2)两方程就能决定车轮的运动轨迹。
用角度表示方向,β(s)表示后轮的角度,θ(s)表示前轮相则前轮角度β+θ,基本微分方程:后轮速度前轮速度,为单位向量其中,)再求导,得即求得至此可得轮转角,W=W1/(2.52·R1),控制轮转3参数化设计根据求得的参数表达式,编写程序,用Matlab通过运行程序,可以绘制出小车运动轨迹图形,结合实际运动情况,综合考虑振幅的大小选择300-400mm,幅过大,可以有效躲避中间的障碍物,但能量相同的情况下,绕过的障碍物就会减少。
同理,振幅减小,绕过障碍物会增加,但会更容易撞到障碍物,所以也要结合实际经验合理优化。
仿真运动轨迹如图5所示。
曲柄摇杆机构优化设计
课程作业曲柄摇杆优化设计姓名:宋*学号:2012138229班级:20121057三峡大学机械与动力学院目录1.曲柄摇杆机构优化设计题目要求 (1)2.课题描述 (2)3.数学模型的建立 (3)3.1设计变量的确定 (3)3.2约束条件的建立 (3)3.3目标函数的建立 (6)4.数学模型的建立 (8)5.用matlab优化计算程序及分析讨论 (8)5.1讨论及结果分析 (9)5.2.程序代码过程 (11)6.参考文献 (10)小结 (12)1.0ψψ=式中0ϕ和0ψ得小于45 ≥[min γγl 1=1l 4 =5。
2.在曲柄输入角从0ϕ到20πϕ+的过程中,使摇杆输出角ψ尽量满足一个给定的函数)(0ϕf 即公式(1)。
对此我将0ϕ到20πϕ+等分为m 分,当然输出角ψ也将对应的分为m 分,然后我将输出角对应的数值与期望函数进行拟合,如果误差降到最小,那么得到的结果将会是优化的解,这是将连续型函数转化为离散型的问题,利用matalab 编程计算,从而求解。
运动模型如图(1)所示图(1)曲柄摇杆机构运动模型图3.数学模型的建立3.1设计变量的确定定义:设计变量是除设计常数之外的基本参数,在优化设计过程中不断地进行修改、调整、一直处于变化的状态,这些基本参数都叫做设计变量。
对于本课题,设计常量为21,l l 长度,分别为1和5。
决定机构部分杆长尺寸32,l l ,以及摇杆按照已知运动规律开始运动时曲柄所处的位置角0ϕ应该列为设计变量即为 X=[]Tx x x 321=[]Tl l 032ϕ由于整个机构的杆长都是按比例来设计的,他们都是1的倍数,按照题目要求曲柄的初始位置为极位角,即0ϕ。
则可以根据曲柄摇杆机构各杆长度关系得到0ϕ和相应的摇杆3l 位置角0ψ的函数,关系式为⎥⎦⎤⎢⎣⎡+-++=42123242210)(2)(arccos l l l l l l l ϕ (2)⎥⎦⎤⎢⎣⎡--+=43232422102)(arccos l l l l l l ψ (3)由已知条件可知21,l l 长度分别为1和5,而根据公式(2)(3)可知,0ϕ0ψ 是由32,l l 的长度来决定,所以32,l l 为独立变量,则可以确定本课题的设计变量 X=[][]TTl l x x 3221=,这是一个二维优化问题。
基于MATLAB的曲柄摇杆机构优化设计
课程作业曲柄摇杆优化设计姓名:XX学号:XXXXX班级:XXXXXXX大学机械与动力学院目录1摘要2问题研究2.1问题重述2.2问题分析3数学模型的建立3.1设计变量的确定3.2目标函数的建立3.3约束条件的确定3.4标准数学模型4使用MATLAB编程求解4.1调用功能函数4.2首先编写目标函数M 文件4.3编写非线性约束函数 M 文件4.4编写非线性约束函数 M 文件confun.m4.5运行结果5结果分析6结论推广7过程反思8个人小结9参考文献1摘要: ab 确,22.10(32πψψ+=式中0ϕ和0ψ得小于4=≥][min γγ另外,2.2 要求摇杆的输出角最优地实现一个给定的运动规律()f ϕ。
这里假设要求:()()20023E f φϕφϕϕπ==+- (1)图1 曲柄摇杆机构简图对于这样的设计问题,可以取机构的期望输出角()E f φϕ=和实际输出角()F φϕ=的平方误差之和作为目标函数,使得它的值达到最小。
在图 1 所示的曲柄摇杆机构中,1l 、2l 、3l 、 4l 分别是曲柄AB 、连杆BC 、摇杆CD 和机架AD 的长度。
这里规定0ϕ为摇杆在右极限位置0φ时的曲柄起始位置角,它们由1l 、2l 、3l 和4l 确定。
3数学模型的建立 3.1 设计变量的确定决定机构尺寸的各杆长度1l 、2l 、3l 和4l ,以及当摇杆按已知运动规律开始运行时,曲柄所处的位置角0ϕ应列为设计变量,所有设计变量有:[][]1234512340T Tx x x x x x l l l l ϕ== (2)考虑到机构的杆长按比例变化时,不会改变其运动规律,通常设定曲柄长度1l =1.0,在这里可给定4l =5.0,其他杆长则按比例取为1l 的倍数。
若取曲柄的初始位置角为极位角,则ϕ及相应的摇杆l 位置角φ均为杆长的函数,其关系式为:()()()()2222212432301242125arccos 2101l l l l l l l l l l ϕ⎡⎤⎡⎤++-+-+==⎢⎥⎢⎥++⎢⎥⎢⎥⎣⎦⎣⎦ (3)()()222221243230343125arccos 210l l l l l l l l l φ⎡⎤⎡⎤+--+--==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(4)因此,只有2l 、3l 为独立变量,则设计变量为[][]1223T Tx x x l l ==。
用matlab分析四杆机构
⽤matlab分析四杆机构⾸先创建函数FoutBarPosition,函数fsolve通过他确定。
function t=fourbarposition(th,th2,L2,L3,L4,L1)t=[L2*cos(th2)+L3*cos(th(1))-L4*cos(th(2))-L1;…L2*sin(th2)+L3*sin(th(1))-L4*sin(th(2))];主程序如下:disp ' * * * * * * 平⾯四杆机构的运动分析* * * * * *'L1=304.8;L2=101.6;L3=254.0;L4=177.8; %给定已知量,各杆长L1,L2,L3,L4th2=[0:1/6:2]*pi; %曲柄输⼊⾓度从0⾄360度,步长为pi/6th34=zeros(length(th2),2); %建⽴⼀个N⾏2列的零矩阵,第⼀列存放options=optimset('display','off'); %θ_3,第⼆列存放θ_3 for m=1:length(th2) %建⽴for循环,求解θ_3,θ_4th34(m,:)=fsolve('fourbarposition',[1 1],…%调⽤fsove函数求解关于θ_3,θ_4options,th2(m),L2,L3,L4,L1); %的⾮线性超越⽅程,结果保存在th34中endy=L2*sin(th2)+L3*sin(th34(:,1)'); %连杆3的D端点Y坐标值x=L2*cos(th2)+L3*cos(th34(:,1)'); %连杆3的D端点X坐标值xx=[L2*cos(th2)]; %连杆3的C端点X坐标值yy=[L2*sin(th2)]; %连杆3的C端点Y坐标值figure(1)plot([x;xx],[y;yy],'k',[0 L1],[0 0],…%绘制连杆3的⼏个位置点'k--^',x,y,'ko',xx,yy,'ks')title('连杆3的⼏个位置点')xlabel('⽔平⽅向')ylabel('垂直⽅向')axis equal %XY坐标均衡th2=[0:2/72:2]*pi; %重新细分曲柄输⼊⾓度θ_2,步长为5度th34=zeros(length(th2),2);options=optimset('display','off');for m=1:length(th2)th34(m,:)=fsolve('fourbarposition',[1 1],…options,th2(m),L2,L3,L4,L1);endfigure(2)plot(th2*180/pi,th34(:,1),th2*180/pi,th34(:,2)) %绘制连杆3的⾓位移关于曲柄2的⾓位移图plot(th2*180/pi,th34(:,1)*180/pi,…th2*180/pi,th34(:,2)*180/pi) %绘制摇杆4的⾓位移关于曲柄2的⾓位移图axis([0 360 0 170]) %确定XY边界值grid %图形加⽹格xlabel('主动件转⾓\theta_2(度)')ylabel('从动件⾓位移(度)')title('⾓位移线图')text(120,120,'摇杆4⾓位移')text(150,40,'连杆3⾓位移')w2=250; %设定曲柄⾓速度for i=1:length(th2)A=[-L3*sin(th34(i,1)) L4*sin(th34(i,2));…L3*cos(th34(i,1)) -L4*cos(th34(i,2))];B=[w2*L2*sin(th2(i)); -w2*L2*cos(th2(i))];w=inv(A)*B;w3(i)=w(1);w4(i)=w(2);endfigure(3)plot(th2*180/pi,w3,th2*180/pi,w4); %绘制⾓速度线图axis([0 360 -175 200])text(50,160,'摇杆4⾓速度(\omega_4)')text(220,130,'连杆3⾓速度(\omega_3)')gridxlabel('主动件转⾓\theta_2(度)')ylabel('从动件⾓速度(rad\cdot s^{-1})')title('⾓速度线图')for i=1:length(th2)C=[-L3*sin(th34(i,1)) L4*sin(th34(i,2));…L3*cos(th34(i,1)) -L4*cos(th34(i,2))];D=[w2^2*L2*cos(th2(i))+w3(i)^2*L3*cos(th34(i,1))-w4(i)^2*L4*cos(th34(i,2));... w2^2*L2*sin(th2(i))+w3(i)^2*L3*sin(th34(i,1))-w4(i)^2*L4*sin(th34(i,2))];a=inv(C)*D;a3(i)=a(1);a4(i)=a(2);endfigure(4)plot(th2*180/pi,a3,th2*180/pi,a4); %绘制⾓加速度线图axis([0 360 -70000 65000])text(50,50000,'摇杆4⾓加速度(\alpha_4)')text(220,12000,'连杆3⾓加速度(\alpha_3)')gridxlabel('从动件⾓加速度')ylabel('从动件⾓加速度(rad\cdot s^{-2})')title('⾓加速度线图')disp '曲柄转⾓连杆转⾓-摇杆转⾓-连杆⾓速度-摇杆⾓速度-连杆加速度-摇杆加速度' ydcs=[th2'*180/pi,th34(:,1)*180/pi,th34(:,2)*180/pi,w3',w4',a3',a4'];disp(ydcs)>> * * * * * * 平⾯四杆机构的运动分析* * * * * *曲柄转⾓连杆转⾓-摇杆转⾓-连杆⾓速度-摇杆⾓速度-连杆加速度-摇杆加速度1.0e+004 *0 0.0044 0.0097 -0.0125 -0.0125 -0.5478 4.84580.0005 0.0042 0.0094 -0.0126 -0.0107 0.2300 5.5630 0.0010 0.0039 0.0092 -0.0124 -0.0086 0.8946 6.0520 0.0015 0.0037 0.0091 -0.0119 -0.0065 1.4143 6.2982 0.0020 0.0034 0.0090 -0.0114 -0.0043 1.7801 6.3174 0.0025 0.0032 0.0089 -0.0107 -0.0021 2.0027 6.1467 0.0030 0.0030 0.0089 -0.0100 0.0000 2.1046 5.8339 0.0035 0.0028 0.0089 -0.0093 0.0020 2.1134 5.4272 0.0040 0.0026 0.0090 -0.0085 0.0038 2.0566 4.9687 0.0045 0.0025 0.0091 -0.0078 0.0054 1.9578 4.4918 0.0050 0.0023 0.0092 -0.0072 0.0069 1.8356 4.0198 0.0055 0.0022 0.0093 -0.0065 0.0082 1.7040 3.5680 0.0060 0.0021 0.0095 -0.0060 0.0094 1.5725 3.1450 0.0065 0.0019 0.0097 -0.0055 0.0104 1.4474 2.7545 0.0070 0.0018 0.0099 -0.0050 0.01131.33282.3968 0.0075 0.0017 0.0102 -0.0045 0.0121 1.2307 2.0702 0.0080 0.0017 0.0104 -0.0041 0.0128 1.1425 1.7716 0.0085 0.0016 0.0107 -0.0037 0.0134 1.0687 1.4971 0.0090 0.0015 0.0110 -0.0034 0.0138 1.0095 1.2426 0.0095 0.0014 0.0112 -0.0030 0.0142 0.9653 1.0035 0.0100 0.0014 0.0115 -0.0027 0.0145 0.9364 0.7752 0.0105 0.0013 0.0118 -0.0024 0.0148 0.9232 0.5530 0.0110 0.0013 0.0121 -0.0020 0.0149 0.9269 0.3319 0.0115 0.0013 0.0124 -0.0017 0.0150 0.9485 0.1069 0.0120 0.0012 0.0127 -0.0014 0.0150 0.9899 -0.1276 0.0125 0.0012 0.0130 -0.0010 0.0149 1.0530 -0.3773 0.0130 0.0012 0.0133 -0.0006 0.0147 1.1404 -0.6481 0.0135 0.0012 0.0136 -0.0002 0.0145 1.2544 -0.9455 0.0140 0.0012 0.0139 0.0002 0.0141 1.3967 -1.2743 0.0145 0.0012 0.0142 0.0008 0.0136 1.5677 -1.63680.0150 0.0012 0.0144 0.0013 0.0129 1.7648 -2.0314 0.0155 0.0012 0.0147 0.0020 0.0121 1.9807 -2.4495 0.0160 0.0013 0.0149 0.0027 0.0112 2.2018 -2.8735 0.0165 0.0013 0.0151 0.0035 0.0101 2.4071 -3.2754 0.0170 0.0014 0.0153 0.0044 0.0089 2.5697 -3.6186 0.0175 0.0015 0.0155 0.0053 0.0076 2.6616 -3.8650 0.0180 0.0016 0.0156 0.0063 0.0063 2.6609 -3.9849 0.0185 0.0018 0.0157 0.0072 0.0049 2.5591 -3.9674 0.0190 0.0019 0.0158 0.0080 0.0035 2.3638 -3.8244 0.0195 0.0021 0.0159 0.0088 0.0022 2.0959 -3.5866 0.0200 0.0023 0.0159 0.0095 0.0010 1.7823 -3.2931 0.0205 0.0025 0.0159 0.0100 -0.0001 1.4487 -2.9815 0.0210 0.0027 0.0159 0.0105 -0.0011 1.1152 -2.6809 0.0215 0.0029 0.0159 0.0108 -0.0020 0.7942 -2.4103 0.0220 0.0031 0.0158 0.0111 -0.0028 0.4916 -2.1794 0.0225 0.0033 0.0158 0.0112 -0.0035 0.2086 -1.9913 0.0230 0.0036 0.0157 0.0112 -0.0042 -0.0565 -1.8450 0.0235 0.0038 0.0156 0.0111 -0.0048 -0.3071 -1.7375 0.0240 0.0040 0.0155 0.0110 -0.0054 -0.5475 -1.6650 0.0245 0.0042 0.0154 0.0108 -0.0060 -0.7817 -1.6233 0.0250 0.0044 0.0153 0.0104 -0.0065 -1.0139 -1.6089 0.0255 0.0046 0.0151 0.0100 -0.0071 -1.2479 -1.6181 0.0260 0.0048 0.0150 0.0096 -0.0077 -1.4868 -1.6480 0.0265 0.0050 0.0148 0.0090 -0.0082 -1.7336 -1.6955 0.0270 0.0052 0.0146 0.0084 -0.0088 -1.9905 -1.7574 0.0275 0.0054 0.0145 0.0076 -0.0095 -2.2588 -1.8304 0.0280 0.0055 0.0143 0.0068 -0.0101 -2.5391 -1.9100 0.0285 0.0056 0.0141 0.0058 -0.0108 -2.8305 -1.9910 0.0290 0.0057 0.0138 0.0048 -0.0115 -3.1300 -2.06600.0295 0.0058 0.0136 0.0037 -0.0122 -3.4326 -2.1255 0.0300 0.0059 0.0133 0.0024 -0.0130 -3.7297 -2.1572 0.0305 0.0059 0.0131 0.0011 -0.0137 -4.0091 -2.1451 0.0310 0.0059 0.0128 -0.0004 -0.0145 -4.2538 -2.0696 0.0315 0.0059 0.0125 -0.0019 -0.0152 -4.4419 -1.9079 0.0320 0.0058 0.0122 -0.0035 -0.0158 -4.5473 -1.6352 0.0325 0.0058 0.0119 -0.0051 -0.0163 -4.5411 -1.2273 0.0330 0.0056 0.0115 -0.0066 -0.0166 -4.3954 -0.6661 0.0335 0.0055 0.0112 -0.0081 -0.0167 -4.0889 0.0551 0.0340 0.0053 0.0109 -0.0095 -0.0166 -3.6129 0.9243 0.0345 0.0051 0.0105 -0.0106 -0.0161 -2.9781 1.9058 0.0350 0.0049 0.0102 -0.0115 -0.0152 -2.2178 2.9395 0.0355 0.0047 0.0099 -0.0122 -0.0140 -1.3857 3.9473 0.0360 0.0044 0.0097 -0.0125 -0.0125 -0.5478 4.8458 图形输出:图2 连杆3的⼏个位置点图4 ⾓加速度线图图5 ⾓加速度线图。
基于matlab的4连杆机构设计

基于matlab的4连杆机构设计第一篇:基于matlab的4连杆机构设计目录1平面连杆机构的运动分析 (1)1.2 机构的工作原理................................................................................................1 1.3 机构的数学模型的建立.......................................................................................1 1.3.1建立机构的闭环矢量位置方程...................................................1 1.3.2求解方法.....................................................................2 2 基于MATLAB程序设计..........................................................................................4 2.1 程序流程图 (4)2.2 M文件编写 (6)2.3 程序运行结果输出.............................................................................................7 3 基于MATLAB图形界面设计....................................................................................11 3.1界面设计 (11)3.2代码设计 (12)4 小结 (17)参考文献………………………………………………………………………………………………18平面连杆机构的运动分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
基于Matlab的四杆机构优化设计简介

·制造业信息化·Vol.22.,200922009机电产品开发与创新Development &Innovation of M achinery &E lectrical P roducts3,No.1Jan .,2010第23卷第1期2010年1月收稿日期:2009-11-06作者简介:李建霞,女,河南信阳人,教授。
主要从事计算机辅助设计教学与研究工作。
已发表核心期刊论文20余篇;王良才,男,山东济南人,副教授。
主要从事机械设计教学与研究工作。
已发表核心期刊论文10余篇。
0引言Matlab 语言是一种非常强大的工程计算语言,提供了非常丰富的Matlab 优化工具箱。
其优化工具箱有许多常用的优化算法,广泛应用于线性规划、二次规划、非线性优化、最小二乘法问题、非线性方程求解、多目标决策等问题,其函数表达简洁,优化算法选择灵活,参数设置自由,相比于其它很多成熟的优化程序具有明显的优越性。
机械优化设计是在现代机械设计理论发展基础上产生的一种新的设计方法,在机械零部件设计中取得了广泛的应用。
机械优化设计是在进行某种机械产品设计时,根据规定的约束条件,优选设计参数,使某项或几项设计指标获得最优值。
在进行优化设计时,首先要建立工程设计问题的数学模型,然后按照数学模型的特点选择优化方法及其计算程序,求得最优设计方案。
1四杆机构优化设计的数学模型四杆机构是机械传动的重要组成部分。
设计四杆机构通常使用作图法与实验法,这两种方法简单易行,但误差较大,运用解析法,能获得所要求的精度,然而用人工进行,整个设计过程是一项繁琐、冗长的工作,甚至可能无法实现。
采用Matlab 优化工具箱对四杆机构进行优化设计,不仅参数输入简单,而且编程工作量小,可更快捷准确地达到设计要求。
四杆机构种类很多,这里只以曲柄摇杆机构为例说明四杆机构优化设计方法。
Matlab 优化工具箱是一套功能强大的工程计算软件,集数值计算、符号运算、可视化建模、仿真和图形处理等多种功能于一体,被广泛应用于机械设计、自动控制和数理统计等工程领域。
基于MATLAB的曲柄摇杆机构的机械优化设计
基于MATLAB的曲柄摇杆机构的机械优化设计以曲柄摇杆机构为例,建立了运动分析数学模型。
以曲柄摇杆机构对应位置实际输出值与期望函数值的平方偏差之和的最小值作为实际目标进行优化。
应用MATLAB软件进行了优化设计和仿真分析,为机构优化设计提供了一种高效、直观的仿真手段,提高了对平面四连杆机构的分析设计能力。
标签:MATLAB;曲柄摇杆机构;优化设计前言平面四连杆机构虽然结构简单,但能有效地实现给定的运动规律或运动轨迹,很好地完成预定的动作,因而在工程实践中得到了广泛应用[1]。
传统的设计方法主要是图解法或分析法,对连杆机构设计,无论设计精度还是设计效率都相对低下,不能满足现代机械高速高精度的要求。
随着计算机技术的不断发展,为机构运用运动仿真实现优化设计提供了有效的手段。
MATLAB是一套功能强大的科学计算软件[2],被广泛应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。
其具有强大的数值计算能力和高效的工具箱函数,高效求解复杂庞大的实际工程问题,并可以根据需要,实现计算结果的可视化效果。
首先构建四连杆机构的数学模型,再利用MATLAB 软件强大的数值计算能力和高效的工具箱函数,以某规定期望函数的平面四连杆机构(机构运动简图如图1 所示)为例进行优化设计并进行了仿真计算,实现了机构运动仿真的可视化。
1 曲柄摇杆机构的数学模型1.1 设计变量机构的基本变量为各杆杆长及曲柄转角,根据曲柄摇杆机构各杆长度间的关系,独立的杆长变量有三个,分别为L2,L3,L4取杆长L1=1。
故曲柄摇杆机构的设计变量可以表示为:1.2 目标函数1.3 约束条件该机构的约束条件有两个方面:一是最小传动角约束条件[3];二是保证四杆机构满足曲柄存在的条件。
(1)最小传动角约束或对应的约束函数为:(2)曲柄存在的条件按曲柄存在条件,由机械原理可知:2 结果比较文章的算例是四连杆机构的一个经典案例,常被研究四连杆机构的学者进行引用,但是很多人研究的都是已知曲柄和机架的参数优化设计,而把机架也作为未知量求解的程序较少,也就是研究的多是两参数的问题,一般把曲柄设置为1,机架设置为5,然后编程进行优化,结果如表1。
matlab四杆机构优化算法

matlab四杆机构优化算法四杆机构是机械工程中常用的一种机构,广泛应用于机械传动、机械臂以及其他工程领域。
四杆机构由四个连杆组成,其中两个连杆为主动连杆,另外两个连杆为从动连杆。
四杆机构的运动特性和性能对于机械系统的设计和优化具有重要意义。
本文将介绍一种基于Matlab的四杆机构优化算法,以提高机构的运动性能和效率。
需要明确优化算法的目标。
在四杆机构的优化中,常见的目标包括最小化机构的运动误差、最大化机构的工作范围、最小化机构的能量消耗等。
根据具体应用的需求,可以选择不同的优化目标。
本文以最小化机构的运动误差为例进行讨论。
在四杆机构中,运动误差是指机构在理想情况下应有的运动轨迹与实际运动轨迹之间的差异。
运动误差的大小直接影响到机构的精度和稳定性。
为了最小化运动误差,可以采用以下步骤进行优化。
需要建立四杆机构的运动学模型。
四杆机构的运动学模型描述了机构各个连杆之间的几何关系和运动规律。
根据四杆机构的结构和运动约束条件,可以建立四杆机构的运动学方程。
在Matlab中,可以利用符号运算工具箱求解运动学方程。
需要确定优化的变量和约束条件。
四杆机构的运动性能受到各个连杆的长度、角度等参数的影响。
在优化中,可以将这些参数作为优化的变量,通过调整这些变量来最小化运动误差。
同时,还需要考虑到机构的实际制造和使用条件,设置相应的约束条件,如连杆长度的范围、运动角度的限制等。
接下来,可以采用优化算法对四杆机构进行优化。
常用的优化算法包括遗传算法、粒子群算法、模拟退火算法等。
这些算法可以在给定的变量范围内搜索最优解,通过迭代的方式逐步优化机构的运动性能。
在Matlab中,可以利用优化工具箱中的相应函数进行优化计算。
需要对优化结果进行评估和验证。
优化算法得到的结果可能并不是唯一的最优解,因此需要对优化结果进行评估,判断其是否满足设计要求。
可以通过仿真和实验验证的方式对优化结果进行验证,进一步改进和优化机构的设计。
基于Matlab的四杆机构优化算法可以帮助改善机构的运动性能和效率。
优化设计-曲柄摇杆机构优化设计
优化设计-曲柄摇杆机构优化设计
[文档标题]
[摘要]
本文档旨在对曲柄摇杆机构进行优化设计,提高其性能和效率。
文档详细介绍了曲柄摇杆机构的原理和结构,分析了优化设计的必要性和目标,展示了具体的优化方案和实施过程。
通过本文档的阅读,读者将对曲柄摇杆机构的优化设计有一个深入的了解,并能够根据实际需求进行相应的设计和改进。
[目录]
1.引言
1.1 研究背景
1.2 研究目的
1.3 研究内容
2.曲柄摇杆机构原理和结构
2.1 曲柄摇杆机构的定义
2.2 曲柄摇杆机构的工作原理
2.3 曲柄摇杆机构的结构组成
3.优化设计的必要性
3.1 现有曲柄摇杆机构存在的问题
3.2 优化设计的目标
4.优化设计方案
4.1 参数分析和优化目标的确定
4.2 设计方案的制定
4.3 仿真分析和评估
5.优化设计的实施过程
5.1 实施步骤和流程
5.2 设计实验和数据分析
5.3 结果和效果评估
6.结论
6.1 实施结果总结
6.2 存在的问题和进一步改进方向[附件]
- 附件1:曲柄摇杆机构优化设计报告- 附件2:仿真分析数据表格
- 附件3:设计实验原始数据
[法律名词及注释]
1.专利法:指国家对某项新的技术或技术方案所给予的一种专
门的权利保护。
2.商标法:指用于表示特定商品来源的某种标志的法律规定和
制度。
3.著作权法:指对于某种独立的创作作品,其作者取得的权利。
4.侵权:指在未取得相应权利人同意的情况下,侵犯他人在专利、商标、著作权等方面的合法权益的行为。
[全文结束]。
基于matlab的四杆机构运动分析
1平面连杆机构的运动分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。
1.2 机构的工作原理在平面四杆机构中,其具有曲柄的条件为:a.各杆的长度应满足杆长条件,即:最短杆长度+最长杆长度≤其余两杆长度之和。
b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。
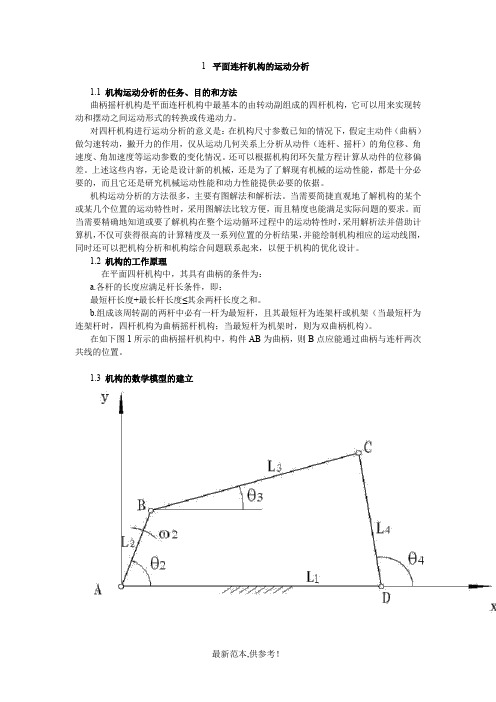
在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
1.3 机构的数学模型的建立1.3.1建立机构的闭环矢量位置方程在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。
如图1所示,先建立一直角坐标系。
设各构件的长度分别为L1 、L2 、L3 、L4 ,其方位角为、、、。
以各杆矢量组成一个封闭矢量多边形,即ABCDA。
其个矢量之和必等于零。
matlab(四连杆优化设计)

机械优化设计在matlab中的应用东南大学机械工程学院**一优化设计目的:在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。
最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。
由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。
二优化设计步骤:1.机械优化设计的全过程一般可以分为如下几个步骤:1)建立优化设计的数学模型;2)选择适当的优化方法;3)编写计算机程序;4)准备必要的初始数据并伤及计算;5)对计算机求得的结果进行必要的分析。
其中建立优化设计数学模型是首要的和关键的一步,它是取得正确结果的前提。
优化方法的选取取决于数学模型的特点,例如优化问题规模的大小,目标函数和约束函数的性态以及计算精度等。
在比较各种可供选用的优化方法时,需要考虑的一个重要因素是计算机执行这些程序所花费的时间和费用,也即计算效率。
2.建立数学模型的基本原则与步骤设计变量的确定;设计变量是指在优化设计的过程中,不断进行修改,调整,一直处于变化的参数称为设计变量。
设计变量的全体实际上是一组变量,可用一个列向量表示:x=。
目标函数的建立;选择目标函数是整个优化设计过程中最重要的决策之一。
当对某以设计性能有特定的要求,而这个要求有很难满足时,则针对这一性能进行优化会得到满意的效果。
目标函数是设计变量的函数,是一项设计所追求的指标的数学反映,因此它能够用来评价设计的优劣。
目标函数的一般表达式为:f(x)=,要根据实际的设计要求来设计目标函数。
约束条件的确定。
一个可行性设计必须满足某些设计限制条件,这些限制条件称为约束条件,简称约束。
由若干个约束条件构成目标函数的可行域,而可行域内的所有设计点都是满足设计要求的,一般情况下,其设计可行域可表示为在可行域中,任意设计点满足全部约束条件,称为可行解,但不是最优解,而优化设计就是要求出目标函数在可行域的最优解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程作业曲柄摇杆优化设计姓名:XX学号:XXXXX班级:XXXXXXX大学机械与动力学院目录1摘要2问题研究2.1问题重述2.2问题分析3数学模型的建立3.1设计变量的确定3.2目标函数的建立3.3约束条件的确定3.4标准数学模型4使用MATLAB编程求解4.1调用功能函数4.2首先编写目标函数M 文件4.3编写非线性约束函数M 文件4.4编写非线性约束函数M 文件confun.m4.5运行结果5结果分析6结论推广7过程反思8个人小结9参考文献1.1摘要: 为分析机构能够满足给定的运动规律和运动空间的要求,运用Matlab 22.10(32πψψ+=式中0ϕ和0ψ得小于45=≥][min γγ1空间,可以适当预选机架杆的长度,现取l 4 =5。
2.2 问题分析设计时,可在给定最大和最小传动角的前提下,当曲柄从0ϕ转到090ϕ︒+时,要求摇杆的输出角最优地实现一个给定的运动规律()f ϕ。
这里假设要求:()()20023E f φϕφϕϕπ==+- (1)图1 曲柄摇杆机构简图对于这样的设计问题,可以取机构的期望输出角()E f φϕ=和实际输出角()F φϕ=的平方误差之和作为目标函数,使得它的值达到最小。
在图 1 所示的曲柄摇杆机构中,1l 、2l 、3l 、 4l 分别是曲柄AB 、连杆BC 、摇杆CD 和机架AD 的长度。
这里规定0ϕ为摇杆在右极限位置0φ时的曲柄起始位置角,它们由1l 、2l 、3l 和4l 确定。
3数学模型的建立 3.1 设计变量的确定决定机构尺寸的各杆长度1l 、2l 、3l 和4l ,以及当摇杆按已知运动规律开始运行时,曲柄所处的位置角0ϕ应列为设计变量,所有设计变量有:[][]1234512340TTx x x x x x l l l l ϕ== (2)考虑到机构的杆长按比例变化时,不会改变其运动规律,通常设定曲柄长度1l =1.0,在这里可给定4l =5.0,其他杆长则按比例取为1l 的倍数。
若取曲柄的初始位置角为极位角,则ϕ及相应的摇杆l 位置角φ均为杆长的函数,其关系式为:()()()()2222212432301242125arccos 2101l l l l l l l l l l ϕ⎡⎤⎡⎤++-+-+==⎢⎥⎢⎥++⎢⎥⎢⎥⎣⎦⎣⎦(3)()()22222124323343125arccos210l l l l l ll l lφ⎡⎤⎡⎤+--+--==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(4)因此,只有2l、3l为独立变量,则设计变量为[][]1223T Tx x x l l==。
3.2目标函数的建立目标函数可根据已知-的运动规律与机构实际运动规律之间的偏差最小为指标来建立,即:()()21minmEi iif xφφ==-→∑(5)式中,Eiφ-期望输出角;m-输出角的等分数;iφ-实际输出角,由图1 可知:图2 曲柄摇杆机构的运动学关系()()2i i iii i iπαβϕπφπαβπϕπ--≤≤⎧⎪=⎨-+≤≤⎪⎩(6)式中,222222322132arccos arccos22i iii ir l l r x xrl r xα⎛⎫⎛⎫+-+-==⎪ ⎪⎝⎭⎝⎭(7)222241424arccos arccos210i iii ir l l rrl rβ⎛⎫⎛⎫+-+==⎪ ⎪⎝⎭⎝⎭(8)2214142cos2610cosi i ir l l l lϕϕ=+-=-(9)3.3约束条件曲柄存在条件:12131423;,l l l l l l l l ≤≤+≤+ ()()24133412,l l l l l l l l ≤-+≤-+曲柄与机架共线位置时的传动角(连杆BC 和摇杆CD 之间的夹角): 最小传动角min min 45r BCD ︒=∠≥ 最大传动角max max 135r BCD ︒=∠≤ 由上面的分析可以算出:()222222234112min231216arccos 4522l l l l x x r l l x x ︒⎡⎤+--⎡⎤+-⎢⎥==≥⎢⎥⎢⎥⎣⎦⎣⎦ (10)()222222234112max231236arccos 13522l l l l x x r l l x x ︒⎡⎤+-+⎡⎤+-⎢⎥==≤⎢⎥⎢⎥⎣⎦⎣⎦ (11)3.4 标准数学模型通过上面的分析后,将输入角分成 30 等分(m=30),经过转化为标准形式得到曲柄摇杆机构优化设计标准数学模型为:()()21min mEi i i f x φφ==-→∑[][]2312TTx l l x x ==()()()()()()()112231241252122612122271212101060..40401.41436036 1.4140g x x g x x g x x x s t g x x x g x x x g x x x x x g x x x x x =-≤⎧⎪=-≤⎪⎪=--≤⎪=--≤⎨⎪=--≤⎪=+--≤⎪⎪=---≤⎩ (12) 机械优化设计中的问题,大多数属于约束优化问题,此为非线性约束优化问题,运用 MATLAB 优化工具箱的命令函数 fmincon 来处理有约束的非线性多元函数最小化优化问题。
4使用MATLAB 编程求解4.1 本问题属于一般非线性规划问题,其标准型为:min ()f x,,()0..()0,AX b Aeq X beq C X s t Ceq X vlb X vub ≤•=≤⎧⎨=≤≤⎩ (13)调用MATLAB 软件优化工具箱中非线性规划求解函数fmincon 来求解。
其命令的基本格式为: [函数] fmincon [格式]x = fmincon(fun,x0,A,b) x = fmincon(fun,x0,A,b,Aeq,beq) x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub) x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon) x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options) [x,fval] = fmincon(…) [x,fval,exitflag] = fmincon(…) [x,fval,exitflag,output] = fmincon(…) [x,fval,exitflag,output,lambda] = fmincon(…) [x,fval,exitflag,output,lambda,grad] = fmincon(…) [x,fval,exitflag,output,lambda,grad,hessian] = fmincon(…) [说明]fun 是目标函数 options 设置优化选项参数fval 返回目标函数在最优解x 点的函数值exitflag 返回算法的终止标志output 返回优化算法信息的一个数据结构grad 返回目标函数在最优解x点的梯度hessian 返回目标函数在最游解x点Hessian矩阵值编写程序求解4.2首先编写目标函数M 文件fun1.mfunction f=fun1(x)s=30;qb=1;jj=5;fx=0;ci0=acos(((qb+x(1))^2-x(2)^2+jj^2)/(2*(qb+x(1))*jj));%曲柄初始角fa0=acos(((qb+x(1))^2-x(2)^2-jj^2)/(2*x(2)*jj));%摇杆初始角for i=1:sci=ci0+(pi*i)/(2*s);fai(i)=fa0+(2*(ci-ci0)^2)/(3*pi);ri=sqrt(qb^2+jj^2-2*qb*jj*cos(ci));alfi=acos(((ri^2+x(2)^2)-x(1)^2)/(2*ri*x(2)));bati=acos((ri^2+jj^2-qb^2)/(2*ri*jj));if ci>0 && ci<=pipsi(i)=pi-alfi-bati;elseif ci>pi && ci<=2*pipsi(i)=pi-alfi+bati;endfx=fx+(fai(i)-psi(i))^2;endf=fx;i=1:1:30;plot(i,fai(i),i,psi(i),'--'); %画曲线图legend('期望曲线','实际曲线'); %标注曲线图对应名称4.3编写非线性约束函数M 文件confun.mfunction [c,ceq]=confun(x)qb=1;jj=5;m=45*pi/180;n=135*pi/180;c(1)=x(1)^2+x(2)^2-2*x(1)*x(2)*cos(m)-(jj-qb)^2;%重合时最小传动角的非线性约束条件c(2)=-x(1)^2-x(2)^2+2*x(1)*x(2)*cos(n)+(jj+qb)^2;%共线时最小传动角的非线性约束条件ceq=[];4.4在MATLAB 命令窗口调用优化程序x0=[6;6];lb=[1;1];ub=[];a=[-1 0;0 -1;-1 -1;1 -1; -1 1];b=[-1;-1;-6;4;4];options=optimset('LargeScale','off','display','iter');[x,fval,exitflag]=fmincon(@fun1,x0,a,b,[],[],lb,ub,@confun,options);4.5运行结果x =[4.1285 2.3226]fval =0.0076图3 输出角期望曲线与在MATLAB结果下的实际曲线对比图图4 传动角与曲柄输入角变化关系图5结果分析通过Matlab工具箱的优化求解,我们得到了最终的曲柄摇杆机构的最优杆长条件,即L2=4.1285,L3=2.3226。
从运行结果上面来看,得到的数据还是比较理想的,在输出角期望曲线与在MATLAB结果下的实际曲线对比图(图3)中,我们可以清楚地看到,期望曲线与实际曲线的拟合程度比较好。
在传动角6结论推广由于在本问题当中,曲柄长度L1和机架长度L4是预先取的L1=1,L4=5,我们通过对L2和L3的优化设计,最终得到了L2=4.1285,L3=2.3226,如果把1看作是单位长度,那么我们最终求解出来的其实是曲柄摇杆机构符合已知运动轨迹的杆长比例。
只要曲柄摇杆机构的四杆长度按照这个比例,即L1:L2:L3:L4=1:4.1285:2.3226:5,那么我们得到的曲柄摇杆机构的运动轨迹都是比较理想的。