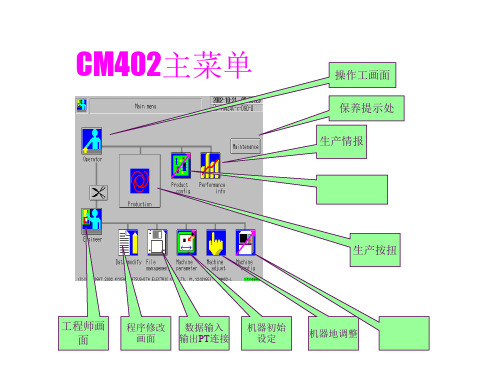
CM402设备精度调整
CM402主要问题处理笔记.ppt

NO.25 NO.30错误代码是反应元件外形 尺寸不良。
CM402元件识别通常采用反射识别。 在元件库设定PT200时REF号码没有明确
指明透射识别REF号码。 机器上的REF库中有详细的说明。
PT200 提供的REF 号码是范围
187是透过 识别。
生产元件识别不良的解决方法
此处为机器上REF库 机器上的REF对51以后的REF号
原因是,如果此元件pickup position设定数值,那么此元 件的吸着位置自动校正功能 就会自动关闭。
Z(M)设定数值对此功能无影 响。
对元件识别后画面的自动储存。(识别过和识别不过画 面同时记录)
选择RECOG UNIT MAINT
选择FOR ADJ 此功能需用 SERVICE KEY
CM402吸着位置自动校正
选择此项进 行功能设定
CM402吸着位置自动校正
打开此选项 进行功能设定
在PICK UP LEARNING FEED BACK 设定为USE
使用此功能的注意事项 (CM402吸着位置自动校正)
机器选择在生产中吸着位置 根据元件识别时得出的偏移 补整量,进行自动吸着位置 补正的功能。在CHIP DATA 的PICK UP position中不可设 定任何数值。
进行此功能的设定,一定要用SERVICE KEY才可进行。 CM402识别画面自动记录数量是1048个画面。
进行ERROR SCRN选择
DISP OLINE—DATA LINE:599/599
NUM 253 ANS:43(11) L:1.600 W:0.800 A:-0.002 B:-0.112
REF:51 C+:1 +:145 H:1 PUT—1 CH:F+ SQ:1 SP1 LMP37
CM402操作指导书

4.2.9.选择”Shtr Close”键
4.2.10.其它三站依照4.2.3.之步骤更换吸嘴
4.3 Nozzle Change(更换吸嘴二)
4.3.1.选择”Product config”键
进入生产设定画面
4.3.2.选择”Nozzle arrangement”键吸嘴准备工作
4.2.3.选择TBL1, TBL2, TBL3, TBL4四站之一站
4.2.4.选择”Shtr Open”键
这时机器会置放吸嘴的吸嘴盒会打开
4.2.5.将机台” SERVO ”转至OFF(O)的位置
4.2.6.将吸嘴依照位置放置至吸嘴盒中
4.2.7.吸嘴放置完成,人员确认NOZZLE是否正确定位, 检查外围是否有杂物,人员离开机台。
5.2
Feeder备料
6
Barcode对料系统
6.1
对料原理
1.机器外观
1.1外部图
1.信号指示灯
2.正面操作面板
包含:触摸式面板、操作按钮、
系统伺服马达开关
3.电源开关
4.正面安全盖
5.供料器置放区BF
6.供料器置放区AF
机台操作正面介绍
1.背面操作面板
包含:触摸式面板、操作按钮、
系统伺服马达开关
注意事项:
4.4.11.1.台车时推至机台外勿撞到机台及SENSOR固定座
4.4.11.2.勿拉扯到电源线
4.4.12.将电源连结线连接至
机台
注意事项:检查电源连结线
接头是否固定OK有无松动
4.4.13.按+Feeder base up键
动作说明:台车升起
CM402 贴片机操作指导书

设备名称贴片机设备编号No设备型号CM402-L操作人员SMT作业员工程部WI-GC-A/0正常生产后进板处卡板且无法清除报警时返回到主菜单重新开始生产6当机器报警提示物料用尽,查看生产画面显示的Feeder站位,换好物料,消除报警,按开始继续生产。
可以用接料带接料。
每一次换料、接料、吸取异常都要校正Feeder的吸着位置。
换料后及时清理机器废料盘。
1.作业不能按指导书进行时;制订/日期发行日期安全注意事项:1.作业时必须配带有绳静电环;在使用设备、治工具作业时要细心,避免对自身造成损伤!7******科技有限公司操作参考图片机器开启后无异常声音,系统启动正常。
操作方法注意事项设备操作指导书准备:作业员,必须参加岗前培训,合格后,方可上岗.机器使用前应做好日常保养和开机检查。
打开电源开关,气源开关,伺服开关旋转到ON的位置,拉起急停开关。
电源(3相AC200V50HZ),气源(0.49MPA~0.54MPA)温度18-28℃,湿度40%-75%;环境温度较低或湿度较大时可适当延厂预热时间,环境温度较高且湿度较小时可适当减少预热时间(有热补偿功能所以预热时间较短)页码有上述生产过程异常时作业人员应及时报告上级并接受指示。
2.设备仪器发生故障时;生产过程异常事项:版本 审核/日期订单生产完,将Feeder中剩余物料取出,清理机器废料盘和废料盒,将废弃物品放到指定位置,取出PCB板顶针,关闭电源开关和气源开关。
如有未贴装完的PCB板,返回到主菜单,PCB板托盘和顶针自动下降,打开安全盖手动将PCB板取出,关闭伺服开关,按下急停按钮,再关闭电源开关、气源开关。
123主菜单中选择机器调整(生产条件开关设定菜单)-选择调整用开关,测试模式ON/实装ON其余OFF,退出到主菜单,点击生产,预热5分钟2.非专业操作员严禁操作机器!小故障解决方法批准/日期制订部门文件编号45机器通过PT200编写和发送程序,使用机器默认的生产条件。
贴片机CM402操作面解
M/C PRMTR HEATCALIBRATE MARK
• 机器自行通过CAAMERA检测机 器在每次一个程序生产完后 机器热变形后的误差. • 此记录的是机器在初始处设 定机器自行找定的标准值.每 次生产时都以此值进行对造 自动进行当前机器状况的 OFFSET值的修改.
上海松下
16
CP/CPK的调整
• 用鼠标点亮BLOCK坐 标 • 此处可进行拼板方向 位置地修改. • 选按DATA SELECT进行 生产.
选择实装头部条件实装
• • • • 选按HEADS 选择实装头部 按回车进行实装生产 注:在选此功能时确定 元件地位置,和贴装情 况,以防贴错.
贴装点地条件实装
• 选择某一贴装点进行 选择性贴装. • 可通过元件名或元件 编号或客户自编名进 行查找.
• • • • • 三号头装上治具 治具是白面治具 每个头做一次. 注:治具表面应擦干净 检测数据机器自动记录到M/C PRMTR MUNE---LIGHING INTENSITY--REAR SIDE--(REAR SIDE LAMP3 --SHADOW=检测后LAMP LEVEL+10 ) FRONTSIDE (LAMP3----SHADOW== 检测后 LAMP LEVEEL +10 )
M/C PRMTR TEACH CHPI RECOG CAMERA
• • • • • • • • 拆下全部的吸嘴 先拆下三号吸嘴的HOLD装上治具.注:弹簧一定要装上去. ⊙±0.05MM CAMERA ANGLE TEACH---RECOG POSN TEACH---机器提示治具换位. 在进行RECOG POSN TEACH时出现识别错误,原因主要是照明亮度.在LIGHTING INTENSITY进行 LAMP亮度调整. 三号吸嘴的检查结果⊙±0.05MM 别的吸嘴的检查都一三号吸嘴为基准,别的吸嘴的⊙误差不定. 三号吸嘴按步骤全做.六号吸嘴按RUN.5,1.2.4.7.8吸嘴NOZZLE ANGLORG OFFSET---JIG SETTING.
CM402.602的CPK计测修改方法
計測
在生產畫面中選擇貼裝位置計測,機器會以 較慢的速度進行貼裝,貼裝進行計測; 上述完畢后,以同樣的準備進行精度計測, 此時機器的貼裝速度會較快,完畢后進行精 度計測。 上述完畢后,進入machine parameter 的如下 圖所示。高速機的指標為0.050,泛用機的指 標為0.035。若其中顯示黃色,說明不可以。 要修正
3.將記錄數值補償入各角度吸頭位置中
注﹕1.同時要角度鋪償, 方法是 F -90度﹐R+90 度.(泛用頭不需要改角 度,中心數據補正與高 速頭一樣)
X F 中心計測X平均值是 0.05,則在各角度吸頭 位置中一號頭X 0度 +0.05 。改后再做精度驗正, 直止CPK通過。 2. +225度相當于-135度
將Ave數值補償入mount position 中
若改過之 后重新測 試仍不可 以,需要 重新補正 再做直至 OK為 止﹗
單個頭補正(高速頭)
• 1.經過上述Ave數值補償后﹐如果還是不能通過﹐則可以修改單頭 來補正。
進入計測各頭 中心計測
2.記錄數值
各頭各個角 度的X,Y數 值大于0.025 或小于0.025時需修 改﹐記錄下 數據(因每 個頭每個角 度有兩組數 劇﹐只需取 平均值即可)
Precision data分析
若再指定的 target下顯示 黃色,說明 不合格,則 要在下圖中 的mount offset 中修正Ave值。 具體做法如 下圖所示。
修正mount position1
在mount position中修 正XY的補償值
修正mount position2
要兩個結合起 來不顯黃色才 算OK﹗單個 或兩結合起來 (CM402A type要四個結 合起來)看有 黃色就算不合 格。如何用 Ave值補償請 見下圖。
CM402 机械调整2

BracketBearing1平面Shaft单元11 22支架Block荷重控制器Sensor Dog备注注意点3. Chip recoy cameraθaxis OriginOffset (Parts Camera 角度补正需要使用专用JIG 。
将JIG 置于3号Head 上进行测定。
JIG No:FM-07249. 对机器的精度进行测定。
在测定之前先进行机器预热,Aging 方式工作30分钟。
1. PCB recog camera Xyaxis OriginOffset需要将PCB Camera 角度调整至0.02以内。
2. Z Axis origin offset (Z 轴的高度补正)使用1003吸嘴进行测量。
8. 进行Head (Z T )axis 的版本升级Machine Parameter-->Machine mainte-->Machine information选择Head (Z Θ)axis--〉Update Start图例作业步骤 本为0.95。
(A Stage 使用多功能头)作业项目多功能Head Unit 的改造所需工具内六角棒所需量具所需治具FM-0724FM-1074FM-1136备注注意点作业项目多功能Head Unit 的改造所需工具内六角棒所需量具所需治具图例作业步骤 在theta 回原点后,检查吸嘴定位爪在左侧,否则theta 回转需要使用专用JIG 。
吸嘴置于3号Head 上。
7. Load Head (贴装的荷重测量)JIG 置于3号Head 上。
5. Light intensity (Part Camera LED 灯光测定)180度后进行下一步精度测定。
4. PCB positioning Mount height (PCB 位置和贴装高度检测)a.点击Load Head 菜单。
b.进行工作台选择、JIG 的放置。
将治具放入测量的工作台。
治具电源借用台车Feeder 电源。
CM402 操作手册说明书

5. 生产基板的变更在与上次不同的基板上实装元件时,需要调整与基板相对应的装置及进行生产材料的供给。
在本章中把生产基板的数据作为PT侧的数据说明了生产基板的变更的操作。
5.1 随生产基板变更的机器位置调整部位5.2 生产数据的变更5.2 生产数据的变更1235.3 搬送导轨宽度的调整下一页5.3 搬送导轨宽度的调整4Z4C-CEn-Ma-0011 4Z4C-CEn-MaCa-0024Z4C-CEn-Ma-0015.4 支撑销的安装4Z4C-CEn-Pc-001SERVOOFF ( )ON ( )下一页5.4 支撑销的安装444C-107P444C-108P444C-107P下一页5.4 支撑销的安装14Z4C-CEn-PcSp-0025.5 吸嘴的交换5.5 吸嘴的交换5.5 吸嘴的交换4Z4C-CEn-Pc-0011SERVOOFF ( )ON ( )5.5 吸嘴的交换5.5 吸嘴的交换4Z4C-CEn-Pc-001SERVOOFF ( )ON ( )5.5 吸嘴的交换5.6 生产材料的配置及确认4Z4C-CEn-DmFl-0015.7 基板搬送测试4Z4C-CEn-Main-001下一页5.7 基板搬送测试5.8 根据条件实装确认实装状态下一页5.8 根据条件实装确认实装状态1 在步骤3.中按下[部品]时12在步骤3.中按下[区块]时1CM402操作手册5.8 根据条件实装确认实装状态Page 5-21下一页4Z4C-C-OMA05-A01-00 4Z4C-CEn-PrCm-001CM402操作手册5.8 根据条件实装确认实装状态4Z4C-CEn-PrCs-002Page 5-22 4Z4C-C-OMA05-A01-00。
CM402操作指导书

CM402操作指导书1000字CM402操作指导书一、前言本操作指导书主要是介绍CM402贴片机的操作,包括启动设备、调整设备参数、装载元件、更换刀片、清理设备、关闭设备等操作。
二、启动设备1、确认电源是否已连接2、打开设备电源开关3、电源指示灯亮起,表示设备已经通电三、调整设备参数1、选择要加工的程序在CM402贴片机操作面板上选择目标元件的贴合程序,将正确的程序导入到设备中。
2、根据程序调整参数设置在程序运行之前,需要调整一些参数,以确保设备能够正常运行。
一个程序包含了多个元件,每个元件都需要调整自己的参数,这些参数包括放置位置、贴合力度、贴合速度、刀片深度等。
3、调整送料器根据元件的尺寸,调整送料器的主、副随风轮并根据元件尺寸修改挂架位置或更换挂架。
四、装载元件1、选择正确的元件在CM402的操作面板上,选择需要装载的元件的程序,并在程序中找到要贴合的元件。
2、打开元件库存储模块打开元件库存储模块的门,并取出需要装载的元件。
3、将元件放入料匣根据元件的尺寸,挑选符合尺寸的料格,将元件放入料格中。
4、选择元件装载位置在程序中指定元件在设备上的装载位置。
5、按下操作面板中的启动按钮启动设备后,装载元件的处理就开始了。
五、更换刀片1、将设备停止,并关闭电源2、打开贴片机的保护罩,将贴片机头部分离设备3、用手轻轻按压刀片安装杆,将刀片安装杆旋转至最佳方向,然后将重量锁定杆拉向手动安装速度,以切换刀片。
4、卸下刀片顺时针旋转锁定杠,拆卸旧刀片。
5、安装新刀片将新刀片插入刀片安装杆,并顺时针旋转锁定杆。
6、测试刀片按下操作面板上的测试刀片按钮,以确保刀片正常运转。
7、将贴片机头部连接回设备上关闭保护罩,并重新启动设备。
六、清理设备1、将设备停止,并关闭电源2、打开贴片机的保护罩,将贴片机头部分离设备3、使用刷子或其他清洁工具,清洁设备内外4、检查设备元件,确认它们没有被污染或损坏5、将贴片机头部连接回设备上6、关闭保护罩,并重新启动设备。
SMT松下贴片机CM402操作机台说明书介绍
5.2.1 确认主菜单 右上的表示是否是开始生产的数据
图12
5.2.2 生产数据不对的场合、从生产线控制器PT200传送数据(线内所有M/C返回
主菜单)。
PT200 启动确认(图 3)
空气? ? 确认(图 4)
4.1.电源投入前确认
4.1.1 装置的伺服ON/OFF开关返回OFF(图5)。
还有、确认是OFF状态。
4.1.2 装置内、工具·支撑 PIN 等异物确认(图6)。
4.1.3CHIP 品排出BOX的清扫(图7)。
B、密码输入后点击确定键。
C、点击「吸嘴交换」 ·显示吸嘴交换画面
D、确认拆卸点的吸嘴的 SHUTTLE 位是空的,再进行拆 除。
E、选择拆卸吸嘴 HEAD①、再选择 shuttle 的吸嘴位。 F、按住操作面板的UNLOCK键,再点击[吸嘴拆卸」
键。 选择好的吸嘴会自动交换。 同样的选择其它的 HEAD 以及吸嘴也进行同样的操
E . 按 shuttle 开,取出吸嘴.
F、吸嘴拆卸动作结束后、点击下功能键的 键,返回主菜单
返回
5.1.2 异形吸嘴 A、点击主菜单的[工程」键、出现密码输入界面。
?
?
5.2.确认生产数据
功能
操作员 工程员 生产 生产设定
生产情報
表示操作员模式 从操作员模式切换到工程员模式 (需要输入密码) 开始自动运转 必要项目确认后、使用
对生产确认必要的设定和动作
显示自动运转中得到的情报 (对确认生产状况有效)
数据修正
生产数据的編集和 TEACH
5.生产准备 5.1.拆卸吸嘴 5.1.1 高速吸嘴 A、主菜单的[生产设定」键按住、出现生产设定菜单
1-4-CM402 Z轴原点补正值校验

同時按下 [Unlock] 和 [Jig remove] ; Transfor head 移動到吸嘴設定位置; 拆下每個頭上的130 吸 嘴;
6
按下返回鍵; 按下返回鍵,機器參數被 自動存儲;
7
同時按下 [Unlock] 和 [Run] . X-Y 軸執行原點復歸動作;
8
CM402-E-M-017-001
Remarks 如果使用8個吸嘴,依次執 行步驟1--8;
1
選擇需要校準的STAGE; 選擇好STAGE 后, 再選擇 GANG
2
同時按下 [Unlock] 和 [Return to origin] ; 待校驗的STAGE 執行原點復歸;
3
同時按下 [Unlock] 和 [Jig setting] . 把130吸嘴安裝到每個頭 Transfor head 移動到吸嘴安裝位置 (NG 上; 抛料盒上方).
TIR05002-06A
Maintenance Adjustment
Item 同時按下 [Unlock] 和 [Height org tch] .
Transfer Head Assembly (8 nozzles)
Remarks 按照步驟5--6,逐次校驗 Transfor head 移動到所需要校驗的stage 2--8號吸嘴; 的熱補正點上方,量測需要校驗的head 的高度;
1-4 工具
Z
None
治具
吸嘴 130 1 pc 或者 8 pcs.
零件重量
CM402-E-M-017-001
Page 4-2-3-1
TIR05002-06A
Maintenance Adjustment
Item 按下 [Zaxis origin offset].
CM402维修培修

CM402维修培训1.X—Y AXIS机器原理的介绍✧X—AXIS MOTOR更换及调整✧Y—AXIS MOTOR更换及调整X/Y轴马达更换与调整(MOTOR与BALLSCREW的同心度)。
原点调整:✧开机→使用Service FD→进入Service Mode→Dubeg Parameter→将Exclusive All Orgin选ON✧进入Axis Parameter→Position ctrl gain2和Speed ctrl gain2改为原值的1/3→M/C resonactrl fill 1/2都改0✧Machine parameter→orgin ,offset值都设定为“0”(针对已更换过的马达)✧Axis Move→Y Axis Orgin(以Y轴为例)→挡Orgin Senser 2次→Y轴上的DOG挡住Orgin Senser(Servo off不能关)✧调整DOG使Orgin Senser能正确感应(用治具放在stopper处,以dog挡住org.sensor) ✧恢复修改过的机器参数马达同心度调整治具更换马达后,连轴器拆除,用连轴器治具套在马达输出轴上转(丝杠不能转)感觉滑顺。
锁连轴器时要注意两边间隙要对称(平均用力)2.TABLE的调整✧SUPPORT TABLE平行度的调整✧导轨宽度原点的调整✧SUPPORT PIN 及CONVEYER HEIGH的调整✧CONVEYER WIDTH的原点调整。
3.PARTS CAMERA 更换与调整。
进入Machine Para→Chip Recog→Jig Setting→Camera Angle Teach,机器自动进行检测。
检测值应在±0.05mm。
若达不到此值,对角度调整螺丝进行调整后,再进行上述机器自动检测。
4.PCB CAMERA更换与调整。
焦距检查:Service状况下→Recog Unit Mait→选Camera Select/Front Board→改变Lamp的亮度→将Lamp2改为0(选Light)角度检查:Machine Para菜单→PCB Recog→Camera Angle Teach→进行相机角度的测定(Angle=±0.21°)5.CUTTER的更换与调整。
贴片机CM402操作说明

吸嘴資料庫
說明吸嘴號碼,適用的零 件,吸嘴大小,吸著高度 等資料
13
料架資料庫
說明料架類型,名字,吸 著位置等資料
辨識資料庫
說明零件資料庫 REF辨識的種類及 方法
14
生產資料檢查
執行生產前資料檢查
生產資料校正畫面
包括基板辨識,bad mark辨識,IC mark辨 識,零件辨識,吸著位置 校正,裝著點校正
選擇使用基板辨識或連 板辨識及mark點數,座標, 辨識方法
吸嘴排列資料
說明頭上吸嘴的排列,號 碼,大小
11
吸嘴Station排列資料
說明nozzle station上吸 嘴的排列,號碼,大小
裝著資料
顯示各table裝著的位置 角度part name,comment
12
功能开关
設定是否by pass,基板辨 識,bad mark辨識,IC mark 辨識
先選擇table及要移動的軸, 再按unlock加XY鍵
Input 檢查
檢查input的訊號,按下 Address即有詳細說明
32
Input 檢查
依各table,conveyor顯示 input 訊號是否正常
Output檢查
先選擇table及要移動的 軸,再按unlock加功能鍵
按下Address即有詳 細說明
條件裝著
可選擇點,零件,連板,head 四種方式進行裝著
23
條件裝著
條件裝著:點的方式
條件裝著:零件方式
24
條件裝著
條件裝著:連板方式
條件裝著:head方式
25
生產畫面
顯示現在生產的情況
Cycle stop
生產時cycle stop停止 的畫面可進行Prod conf,Data modify,Machine conf,Mainte,Performan ce info的查看或修改資 料
CM402设备精度调整

1.设施精度调整1.2 机器参数的示教步骤在进行示教前,请确认偏振光板没有安装在吸头照相机上。
各“机器参数的示教”画面能够按以下步骤翻开。
1. 按<主菜单>画面的<机器参数菜单 >画面将显示出来2. 按[机器参数示教]键3. 按操作面板的<机器参数的示教菜单 >画面将显示出来4. 按进行示教的参数键此处举一个例子,按 [ 基板辨别照相机 XY 轴原点偏移量 ] 键5. 选择进行示教的工作台6. 依据画面的提示,开始机器参数的示教基板辨别照相机·XY 轴原点偏移量1. 按[基板辨别照相机XY轴原点偏移量 ]键2. 3.选择示教工作台按操作面板的+[固定标记地点移动 ]键吸头照相机将挪动到标记地点4. 按操作面板的+[照相机角度示教 ]5. 按操作面板的+[XY 轴原点偏移量照相机倍率示教 ] 键。
重复步骤 2. ~ 5的操作,在其余工作台上也要进行相同的操作。
6. 按功能键。
回到 <机器参数示教菜单 >画面1.2.2 Z轴原点偏移量A)高速吸头 (8 个吸嘴 ) 时A) 在使用 8 根 130 号吸嘴时 ( 整体示教 )1. 按[Z轴原点偏移量]键2. 选择示教工作台3. 按操作面板的+ [ 原点复归 ]键4. 按操作面板的+ [量具设置 ]键5. 将伺服开关置于OFF状态6. 翻开安全盖7. 在整个吸嘴地点上安装130号吸嘴8. 封闭安全盖9. 将伺服开关置于ON状态10.按操作面板的+ [高度原点示教 ]键11.按操作面板的+ [卸掉夹具 ]键12.将伺服开关置于OFF状态13.翻开安全盖14.取下吸嘴15.封闭安全盖16.将伺服开关置于ON状态重复步骤 2. ~ 16.的操作,在其余工作台上也要进行相同的操作17.18.按功能键按操作面板的+ [履行]键B)使用 1 根130 号吸嘴时 ( 每个吸嘴的示教 )1. 2. 3.按[Z 轴原点偏移量 ]键选择示教工作台按[每个吸嘴 ]键4. 按操作面板的+ [ 原点复归 ]键5. 按操作面板的+ [ 量具设置 ]键6. 7.将伺服开关置于 OFF 状态翻开安全盖8. 在画面所显示的吸嘴地点上安装130号吸嘴9. 封闭安全盖10.将伺服开关置于ON状态11.按操作面板的+ [高度原点示教 ]键12.重复步骤5. ~ 11.的操作,在吸嘴位置 2到吸嘴地点 8 之间进行示教13.14.15.16.17.按操作面板的+ [ 卸掉夹具 ]键将伺服开关置于 OFF 状态翻开安全盖取下吸嘴封闭安全盖18. 将伺服开关置于ON状态重复步骤 2. ~ 18. 的操作,在其余工作台上也要进行相同的操作19. 按功能键20.按操作面板的+ [履行 ]键吸头移向原点地点B)多功能吸头 (3 个吸嘴 )时A)使用 3 根1003 号吸嘴时 ( 整体示教 )1. 按[Z轴原点偏移量]键。
CM402操作说明书

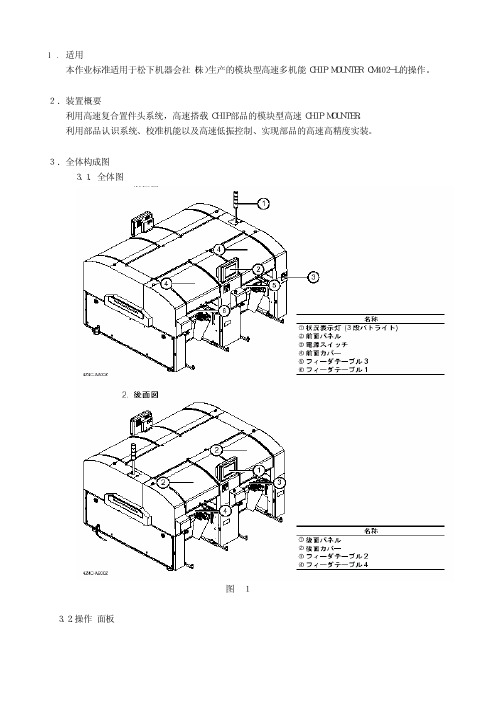
1.适用本作业标准适用于松下机器会社(株)生产的模块型高速多机能CHIP MOUNTER CM402-L的操作。
2.装置概要利用高速复合置件头系统,高速搭载CHIP部品的模块型高速CHIP MOUNTER。
利用部品认识系统、校准机能以及高速低振控制、实现部品的高速高精度实装。
3.全体构成图3.1.全体图图13.2.操作面板开关作用开始生产,以及从暂时停止状态到再启动时使用暂时停止生产時(SINGLE STOP )使用机器开动的按键、为防止危险、要与这个开关同时使用。
按下此键 ,控制面板的左上显示,表示触摸锁定。
未使用控制面板的背景灯点灯。
背景灯在一定时间内不操作的话会自动黑屏又、黑屏的时间可以变更操作面板以及触摸面板操作的场合、进行前面和后面的切换场合使用(按下去的话会点灯、才可以使用)。
根据SERVO OFF 、操作面板的操作变成无效的场合、点灯。
触摸面板的背景灯熄灭的场合点灯。
SERVO(伺服开关)马达的伺服开关。
在机械内部进行作业的场合、一定要把开关打倒OFF的位置,、再进行作业。
开始生产的场合要把全面・后面的伺服开关都打倒ON的位置。
EMERGENCY STOP(非常停止)让机械紧急停止的开关。
按下去机械停止。
重起的场合拉这个开关就要解除。
3.3.触摸面板①操作界面②非常停止按钮 (2个位置)图2NO. 名称説明1上功能键仅F1使用(F2~F8未使用)2阶层、模式、菜单名显示区域现在有显示的画面是什么状态,由各项目和图标表示图标是主菜单与相同的显示例)上记画面的场合操作员模式生产中、表示单个停止3年月日时间、数据名显示表示区域现在的年月日、时间、数据名等表示4状态表示、开关、信息区域装置的状态或信息、进行操作的开关等显示5著作权、系统版本、画面名表示区域画面的著作权、系统的版本、显示画面名6下功能键经常使用的机能3.4.功能键说明上功能键功能附加显示阶段切换显示附加的阶段替换键按住,就从A阶段切换到B阶段下功能键功能画面印刷显示画面的HARD COPY KEYCOPY内容是由与PT连接的打印机打印的下功能键功能附加认识画面、在触摸面板上显示附加。
1-3-CM402 基板辨识照相机 --- X-Y 轴原点校验

4
CM402-E-M-016-002
Page 4-2-2-2
TIR05002-06A
Maintenance Adjustment
Item 同時按下 [Unlock] 和 [Xyaxis org offset mgf teach]
TIR05002-06A
7
CM402-E-M-016-002
Page 4-2-2-3
TIR05002-06A
CM402-E-M-016-002
Page 4-2-2-4
TIR05002-06A
CM402-E-M-016-002
Page 4-2-2-5
TIR05002-06A
CM402-E-M-016-002
Page 4-2-2-6
1-3 工具
X-Y
None
治具
NoneBiblioteka 縂時間CM402-E-M-016-002
Page 4-2-2-1
TIR05002-06A
Maintenance Adjustment
Item 按下 [PCB recog camera Xyaxis OriginOffset].
Transfer Head Assembly (8 nozzles)
Transfer Head Assembly (8 nozzles)
Remarks
基板辨識相機抓取機器内部的熱補正點,通過 計算得出相機的放大倍率,錄入機器參數;
5
同時按下 [Unlock] 和 [Run] ; X-Y 軸執行原點復歸動作
SMT松下贴片机CM402操作机台说明书介绍
4.2.电源投入
4.2.1 电源开关返回ON。(图10)
4.2.2 如图10,3 分钟左右主菜单的初期画面启动
各操作不用功能键,用触摸画面来完成。
OF
ON
电源开关(图 1 0 )
图11
4.1.4 切割 TAPE BOX的清扫(图8)。
4.1.5 非常停止开关的解除(图9)。
1)伺服? OFF 确认(图 5)
2)? ? ? 异物确认(图 6)
3)CHIP 品废弃BOX的清扫(图 7)
4)剩余 TAPE BOX 的清扫(图 8)
5)非常停止开关的解除(图 9)
左上显示 ,表示触摸锁定。
未使用
控制面板的背景灯点灯。
背景灯在一定时间内不操作的话会自动黑屏
Байду номын сангаас
又、黑屏的时间可以变更
操作面板以及触摸面板操作的场合、进行前面和后面的切换场合使用(按下去的话
会点灯、才可以使用)。
根据 SERVO OFF、操作面板的操作变成无效的场合、点灯。 触摸面板的背景灯熄灭的场合点灯。 SERVO(伺服开关)
图 1 3.2.操作 面板
①操作界面
②非常停止按钮 (2 个位置)
开关
作用
开始生产,以及从暂时停止状态到再启动时使用
暂时停止生产時(SINGLE STOP)使用
机器开动的按键、为防止危险、要与这个开关同时使用。按下此键 ,控制面板的
5.生产准备 5.1.拆卸吸嘴 5.1.1 高速吸嘴 A、主菜单的[生产设定」键按住、出现生产设定菜单
B、按一下吸嘴? ? ?
C、按住? ? 面板的
U N L O C K 开关? 再点击吸
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.设备精度调整1.2 机器参数的示教步骤在进行示教前,请确认偏振光板没有安装在吸头照相机上。
各“机器参数的示教”画面可以按以下步骤打开。
1. 按<主菜单>画面的<机器参数菜单>画面将显示出来2. 按[机器参数示教]键3. 按操作面板的<机器参数的示教菜单>画面将显示出来4. 按进行示教的参数键此处举一个例子,按[基板识别照相机XY 轴原点偏移量]键5. 选择进行示教的工作台6. 按照画面的提示,开始机器参数的示教1.2.1 基板识别照相机·XY 轴原点偏移量1. 按[基板识别照相机XY 轴原点偏移量]键2. 选择示教工作台3. 按操作面板的+ [固定标志位置移动]键吸头照相机将移动到标记位置4. 按操作面板的+ [照相机角度示教]+ [XY 轴原点偏移量照相机倍率示教]键。
重复步骤2. ~ 5 的操作,在其它工作台上也要进行同样的操作。
6. 按功能键。
回到<机器参数示教菜单>画面1.2.2 Z 轴原点偏移量A) 高速吸头(8 个吸嘴) 时A)在使用8 根130 号吸嘴时(整体示教)1. 按[Z 轴原点偏移量]键2. 选择示教工作台3. 按操作面板的+ [原点复归]键5. 将伺服开关置于OFF状态6. 打开安全盖7. 在整个吸嘴位置上安装130 号吸嘴8. 关闭安全盖9. 将伺服开关置于ON 状态11. 按操作面板的+ [卸下夹具]键12. 将伺服开关置于OFF 状态13. 打开安全盖14. 取下吸嘴15. 关闭安全盖16. 将伺服开关置于ON 状态重复步骤2. ~ 16.的操作,在其它工作台上也要进行同样的操作18. 按操作面板的+ [执行]键B) 使用1 根130 号吸嘴时(每个吸嘴的示教)1. 按[Z 轴原点偏移量]键2. 选择示教工作台3. 按[每个吸嘴]键4. 按操作面板的+ [原点复归]键5. 按操作面板的+ [量具设置]键7. 打开安全盖8. 在画面所显示的吸嘴位置上安装130 号吸嘴9. 关闭安全盖10. 将伺服开关置于ON 状态11. 按操作面板的+ [高度原点示教]键12. 重复步骤5. ~ 11.的操作,在吸嘴位置2到吸嘴位置8 之间进行示教13. 按操作面板的+ [卸下夹具]键14. 将伺服开关置于OFF 状态15. 打开安全盖16. 取下吸嘴17. 关闭安全盖18. 将伺服开关置于ON 状态重复步骤2. ~ 18.的操作,在其它工作台上也要进行同样的操作19. 按功能键20. 按操作面板的+ [执行]键吸头移向原点位置B) 多功能吸头(3 个吸嘴)时A) 使用3 根1003 号吸嘴时(整体示教)1. 按[Z 轴原点偏移量]键。
2. 选择示教工作台。
3. 按操作面板的+ [原点复归]键。
5. 将伺服开关置于OFF状态6. 打开安全盖7. 将1003号吸嘴安装在全部吸嘴位置上8. 关闭安全盖9. 将伺服开关置于ON 状态10. 按操作面板的+ [高度原点示教]键12. 将伺服开关置于OFF 状态13. 打开安全盖14. 取下吸嘴15. 关闭安全盖16. 将伺服开关置于ON状态重复步骤2. ~ 16.的操作,在其它工作台上也要进行同样的操作17. 按功能键18. 按操作面板的+ [执行]键B) 使用1 根1003 号吸嘴时 (对每个吸头进行示教)1. 按[Z 轴原点偏移量]键2. 选择示教工作台3. 按[每个吸头]键4. 按[吸头No]键。
示教的号码将显示出来。
反复按动该键,一直到要进行示教的吸头的号码显示出来为止5. 按操作面板的+ [原点复归]键7. 将伺服开关置于OFF状态8. 打开安全盖9. 将1003号吸嘴安装在画面所示的位置上10. 关闭安全盖11. 将伺服开关置于ON 状态12. 按操作面板的+ [高度原点示教]键13. 重复步骤4. ~ 12.的操作,在吸头位置1到吸头位置3 之间进行示教15. 将伺服开关置于OFF 状态16. 打开安全盖17. 取下吸嘴18. 关闭安全盖19. 将伺服开关置于ON 状态重复步骤2. ~ 19.的操作,在其它工作台上也要进行同样的操作20. 按功能键21. 按操作面板的+ [执行]键吸头移向原点位置1.2.3 芯片识别照相机·θ轴原点偏移量高速吸头(8 个吸嘴)1. 按[芯片识别照相机θ轴原点偏移量]键2. 选择示教工作台3. 按操作面板的+ [量具设置]键吸头移动到量具设置位置之后,伺服开关将自动置于OFF状态4. 将伺服开关置于OFF 状态5. 打开安全盖6. 将量具置于3 号吸嘴位置上多功能吸头时将置于吸头No 1 上7. 关闭安全盖8. 将伺服开关置于ON 状态9. 按操作面板的+ [θ轴原点偏移量照相机倍率示教]键键,0︒状态时按[否]键高速吸头 (固定螺钉为正面=0)多功能吸头 (爪在左侧=0)11. 按操作面板的+ [照相机角度示教]键当角度偏移量超过规定值时,将会出现相应的提示,装置将停止运行12. 按操作面板的+ [识别位置示教]键13. 将伺服开关置于OFF 状态14. 打开安全盖15. 将量具重新安装在6 号吸嘴位置上16. 关闭安全盖17. 将伺服开关置于ON 状态18. 按操作面板的+ [执行]键19. 按操作面板的+ [量具设置]键20. 将伺服开关置于OFF 状态21. 打开安全盖22. 将量具置于吸嘴位置4 上(画面上的显示为pos4)此时,pos 显示为4多功能吸头时,置于吸嘴No1 上23. 关闭安全盖24. 将伺服开关置于ON 状态26. 重复步骤19. ~ 25.的操作,进行示教操作,一直到吸嘴位置显示为2多功能吸头时所作示教应使吸嘴位置一直显示为3 的状态27. 按操作面板的+ [卸下夹具]键28. 将伺服开关置于OFF 状态29. 打开安全盖30. 卸下夹具31. 关闭安全盖32. 将伺服开关置于ON 状态重复步骤2. ~ 32.的操作,在其它工作台上也要进行同样的操作34. 按操作面板的+ [执行]键吸头移向原点位置1.2.4 宽度调整轴的原点偏移量请将支撑销全部取下。
1. 按[宽度调整轴原点偏移量]键2. 选择示教工作台3. 按操作面板的+ [原点复归]键宽度调整轴将复归到原点位置上4. 按操作面板的+ 或者+转动宽度调整轴,在用游标测量传送带宽度的同时将宽度调整到460.5mm~460.7 mm按[键速率]键,可以改变每次按动或者的动作量0.01mm→0.1mm→1mm示教结果将被保存重复步骤2. ~ 5.的操作,在其它工作台上也要进行同样的操作6. 按功能键回到<机器参数示教菜单>画面1.2.5 确定基板位置及实装高度高速吸头(8 个吸嘴)请将支撑销全部取下在进行基板定位、实装高度示教前,请确认偏振光板没有安装在吸头照相机上。
1. 按[基板定位实装高度]键在这里,有时可以进行传送带宽度的调整2. 选择示教工作台3. 按操作面板的+ [量具设置]键5. 打开安全盖6. 将吸嘴(130 号)安装在吸嘴位置3 号上多功能吸头时是1003号7. 关闭安全盖8. 将伺服开关置于ON 状态9. 按操作面板的+ [量具调整]键 吸头退避,第2 实装位置的基板止动器将处于ON 状态10. 将伺服开关置于OFF 状态11. 打开安全盖12. 将实装高度量具1置于第2 实装位置上将量具孔置于下图位置上自左到右,外侧基准自左到右,内侧基准自右到左,外侧基准自右到左,内侧基准13. 关闭安全盖14. 将伺服开关置于ON 状态15. 按操作面板的+ [基板定位示教]键。
进行示教操作16. 按操作面板的+ [实装高度示教]进行示教操作17. 按操作面板的+ [量具调整]键吸头退避,第1 实装位置的基板止动器将处于ON 状态18. 将伺服开关置于OFF 状态19. 打开安全盖20. 卸下第2 实装位置上的实装高度量具1将量具置于第1 实装位置上请将量具孔置于下图位置上自左到右,外侧基准自左到右,内侧基准自右到左,外侧基准自右到左,内侧基准22. 将伺服开关置于ON 状态23. 按操作面板的+ [基板定位示教]键进行示教操作24. 按操作面板的+ [实装高度示教]键。
进行示教操作25. 按操作面板的+ [卸下夹具]键26. 将伺服开关置于OFF 状态27. 打开安全盖28. 拆卸吸嘴和实装高度量具29. 关闭安全盖30. 将伺服开关置于ON 状态。
重复步骤2. ~ 29.的操作,在其它工作台上也要进行同样的操作31. 按功能键32. 按操作面板的+ [执行]键吸头移向原点位置1.2.6 面补正在进行面补正示教前,请确认偏振光板没有安装在吸头照相机上1. 按[面补正]键2. 选择示教工作台请选择AF 或BF前侧示教完之后接着示教后侧,以使整体都得到示教3. 按操作面板的+ [量具设置]键4. 将伺服开关置于OFF 状态5. 打开安全盖反方向的传送带上,然后使之滑动到Z 夹具的下方,推碰到止动器上7. 关闭安全盖8. 将伺服开关置于ON 状态9. 按操作面板的+ [量具调整]键10. 将伺服开关置于OFF 状态11. 打开安全盖12. 使面补正量具紧贴在Y 方向基准导轨上15. 按操作面板的+ [面补正示教]键先进行前侧示教,接着进行后侧的示教16. 按操作面板的+ [卸下夹具]键17. 将伺服开关置于OFF 状态18. 打开安全盖19. 将量具拆下重复步骤2. ~ 21.的操作,在其它工作台上也要进行同样的操作22. 按功能键23. 按操作面板的+ [执行]键吸头移向原点位置1.2.7 吸着位置在进行吸着位置示教前,请确认偏振光板没有安装在吸头照相机上。
1. 按[吸着位置]键2. 选择示教工作台此时,请确认是否已选择好‘XY’和‘Z’(反转表示)工作台3. 确认是否处于‘左工作台示教位置’状态当处在‘右工作台示教位置’时,按一下按钮就会回到‘左工作台示教位置’4. 按操作面板上的+ [量具设置]键5. 将伺服开关置于OFF 状态6. 打开安全盖7. 把吸着位置量具1安装在所选工作台的左侧第2 个插槽上8. 将130 号吸嘴安装在吸嘴位置3上多功能吸头时是1003 号吸嘴9. 关闭安全盖10. 将伺服开关置于ON 状态11. 按操作面板上的+ [吸着位置示教]键画面的显示将会切换为‘示教位置中工作台’13. 按操作面板上的+ [量具设置]键14. 将伺服开关置于OFF 状态15. 打开安全盖16. 将吸着位置治具1移至选择工作台的14号插槽17. 关闭安全盖18. 将伺服开关置于ON19. 按操作面板的 [吸着位置示教]21. 按操作面板的 [量具设置]22. 将伺服开关置于OFF23. 打开安全盖24. 把吸着位置量具1移动到所选的工作台右端27 号插槽上25. 关闭安全盖26. 将伺服开关置于ON 状态27. 按操作面板上的+ [吸着位置示教]键28. 按操作面板上的+ [卸下夹具]键29. 将伺服开关置于OFF 状态30. 打开安全盖31. 卸下夹具32. 关闭安全盖33. 将伺服开关置于ON 状态重复步骤2. ~ 33.的操作,在其它工作台上也要进行同样的操作34. 按功能键35. 按操作面板上的+ [执行]键吸头将移到原点位置上1.2.8 吸嘴交换位置测定吸嘴交换器位置的量具在进行吸嘴交换位置示教前,请确认偏振光板没有安装在吸头照相机上。