GigE Vision接口摄像机及其应用
千兆网工业相机之GigE接口介绍

千兆网工业相机技术之Gigabit Ethernet (GigE)接口介绍关键词:GIge接口介绍,GIGE技术
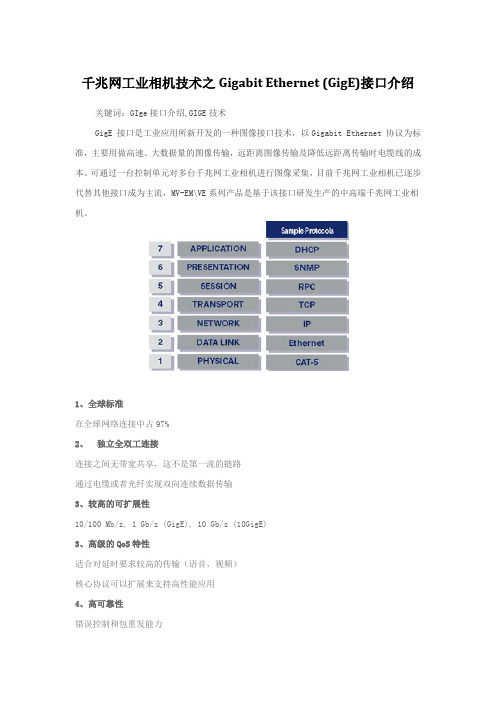
GigE 接口是工业应用所新开发的一种图像接口技术,以Gigabit Ethernet 协议为标准,主要用做高速、大数据量的图像传输,远距离图像传输及降低远距离传输时电缆线的成本。
可通过一台控制单元对多台千兆网工业相机进行图像采集,目前千兆网工业相机已逐步代替其他接口成为主流,MV-EM\VE系列产品是基于该接口研发生产的中高端千兆网工业相机。
1、全球标准
在全球网络连接中占97%
2、独立全双工连接
连接之间无带宽共享,这不是第一流的链路
通过电缆或者光纤实现双向连续数据传输
3、较高的可扩展性
10/100 Mb/s, 1 Gb/s (GigE), 10 Gb/s (10GigE)
3、高级的QoS特性
适合对延时要求较高的传输(语音,视频)
核心协议可以扩展来支持高性能应用
4、高可靠性
错误控制和包重发能力。
机载GigE Vision高清影像采集记录技术研究

机载GigE Vision高清影像采集记录技术研究作者:张杰张虎龙邹强来源:《现代电子技术》2013年第10期摘要:在运八型飞机飞行流场测试课题中为了达到对机体不同部位的丝带进行高清影像采集记录的目的⁃在试验过程中设计了基于GigE Vision接口标准的多路高清机载视频采集记录方案⁃在机载测试环境下实现了双路1 080P高清视频的实时采集、传输、压缩与记录。
同时将IRIG⁃B时间精确同步技术引入高清视频采集系统中⁃实现了拍摄画面与测试系统的精确同步功能。
在此详细介绍了机载视频采集记录系统的主要设计内容以及实现方法⁃并结合具体飞行试验⁃对研究成果进行了验证和应用说明。
关键词: GigE Vision;高清影像;视频采集;飞行试验中图分类号: TN911⁃34;TP333.4 文献标识码: A 文章编号: 1004⁃373X(2013)10⁃0045⁃040 引言随着高分辨数字摄像机技术的不断发展,在科研试飞中胶片式摄像机已经逐步退出了历史舞台,机载数字摄像机分辨率的不断提升是技术发展必然趋势[1⁃2]。
在近几年的科研试飞过程中,机载高分辨率数字摄像机所获取的高清晰度数字视频已经在很大程度上带来了测量精度的提高和视觉效果的改善。
但机载高分辨数字视频本身数据量大,对其进行实时传输与采集压缩是一项亟待解决的课题。
以运八飞机流场测试课题中的应用为例,1套数字视频采集设备需要对分辨率为1 600×1 200像素、帧频为30 f/s、时长为240 min的2路数字视频进行传输与采集,单路传输所需的数据率接近为83 MB/s,传输距离接近30 m,采集2路的未压缩视频的数据量大于800 GB,对此,存在两个方面的问题需要解决:(1)需要一种兼顾传输速率、传输距离的视频接口标准;(2)需要一种高效的视频编解码技术以实现高分辨率数字视频的压缩采集。
本文针对以上两个问题,结合实际应用环境对GigE Vision和H.264技术进行了相关研究,旨在研制出一种满足机载测试条件的基于GigE Vision接口标准的高清影像视频采集记录系统,解决高清数字视频长距离传输过程中存在的信号衰减问题,探索出一种高效的视频编解码技术,实现多路高清数字视频的采集压缩记录以及回放显示,并在飞行试验过程中提供满足地面监控所需的遥测下传视频图像。
GigE Vision TM摄像机即将登场ITS领域
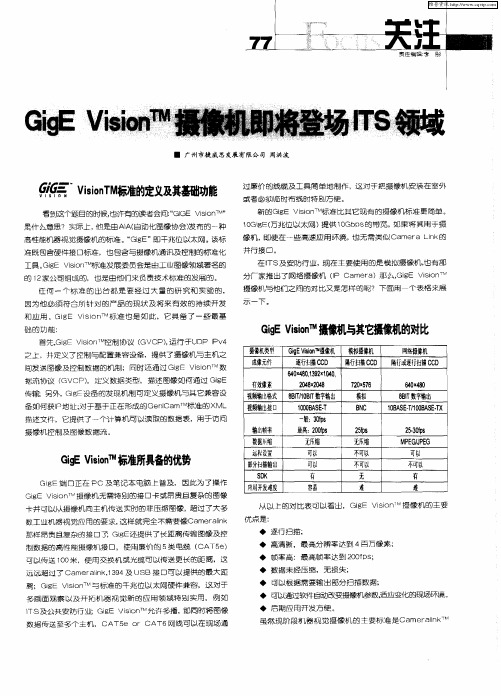
在 IS及 安 防 行 业 , 在 主 要 使 用 的 是 模 拟 摄 像 机 地 有 部 T 现
分 厂 家 推 出 了 网 络 摄像 机 ( me a I Ca r )那 J, g s n P A GiE Vii o 摄 像 机 与他 们 之 间 的 对 比 又 是怎 样 的 呢7 下 面 用
个 表 格 来展
G EV iT 像 与 它 像 对 i i n 摄 机 其 摄 机的 比 g s M o
摄 机 像 类 成 元f 像 十 :
有像 效 素 视 输 接口 频 山 输 帧 山 率
首 先 , g iin 控 制 协 议 ( CP)运 行 于 U P I 4 GiE Vs o GV , D Pv 之 上 ,并 定义 了控 制 与 配 置 兼 容 设 备 ,提供 了摄 像 机 与 主 机 之
看 到这 个题 目 的时 候 , 有的 读 者会 问: G iin ” 也许 “ E Vs GI o
是什 /意思 7 实 际 上 , 是 由 AI 自 动 化 图像 协 会 ) 布的 ~种 厶 他 A( 发 高性 能机器 视 觉摄像 机的 标 准 。 GiE “ g ”即 千兆 位 以 太 网 。 标 该 准 既 包含 硬件 接 口标 准 , 也包 含 与 摄 像 机 通讯 及 控 制 的标 准化 工具 。 g iin 标 准 发展 委 员会 是 由 工业 图 像 领 域著 名 的 Gi Vs E o 的 1 家公 司组 成 的 ,也 是 由他 们 来 负 责 技 术标 准 的 发 展 的 。 2
视 输山 式 BIIB 数 输 频 格 BI I 字 出 TOT
般 3p :U s
鹾 : 0p 高 2 f 0s
数 J 据f i 缩
无 缩 压
GigE-Vision-2.0说明书

目录引言 (1)第1章设备发现 (2)1.1链路选择 (2)1.2IP地址配置 (3)1.3设备枚举 (3)1.4设备添加与删除 (4)第2章GVCP协议 (5)2.1基本概念 (5)2.2通道 (5)2.3其他 (10)第3章引导寄存器 (13)3.1引导寄存器 (13)3.2相机的标准特征表 (21)引言GigE Vision是一种通信接口标准,可用于各种网络拓扑上的视觉软件与视频流设备间的交互。
该标准是基于UDP/IP协议体系,并构成了Gige Vision协议(工作在应用层,包括GVCP和GVSP两个协议)。
需要的设备包括IP网络上各种软硬件摄像机、处理器、路由器等。
本说明中,设备指的是一个GigE Vision兼容的可控设备,而应用程序指运行在一台主机上的一个与GigE Vision兼容的控制程序。
本说明分三部分,即设备发现、GVCP协议和引导寄存器,分别在对应的章节中介绍。
第1章设备发现PC在接入设备时,需要一种机制发现设备,即链路选择、IP地址配置、设备枚举。
1.1链路选择设备在接入PC后,需要确定所有通信链路哪些是可用的,然后与PC端协调选择相应速率的链路。
共提供了4种不同类型的物理链路配置:①单链路配置SL②多链路配置ML③静态链路聚合组配置sLAG④动态链路聚合组配置dLAG其中,头2个配置中,每个物理链路接口都有1个不同的IP地址;对于后2个配置,物理接口经过重组后,只有1个IP地址在程序中可见,物理链路的分组在MAC层执行,对于应用软件是透明的。
1.1.1单链路配置最简单的配置,所有的流通道加到一个有效物理链路上,所有设备必须支持SL配置。
1.1.2多链路配置一个设备必须最多支持4个不同的网络接口。
接口#0(唯一支持GVCP)为主接口来控制设备的控制与消息通道,如设备发现总是在#0上执行,以确保设备使用不同的IP地址而不被多次发现。
其他接口只支持附加的流通道,如发送或接收GVSP数据包。
gige vision协议数据流控机制的分析与实现

• 113•GigE Vision协议提供了高性能工业相机数据通信的标准接口,本文基于GigE Vision协议设计并实现了一种流控机制,该机制主要作用于PC客户端,可满足相机发送端发送图像数据、图像信息或其他信息给接收端的需求,同时保证数据传输的高效可靠。
该机制在传输层上使用UDP协议,避免了传输层复杂的流控带来延迟,实现数据包的高速传输;在应用层上实现了GVCP控制协议和GVSP数据流协议两种不同的可靠传输机制,在连续高速采集数据的同时,能有效检测并处理丢包情况。
通过搭建ZC702相机开发板和PC客户端应用程序测试平台,连续发送多幅图像数据,采用Wireshark抓包软件分析并验证了该设计方案达到了100Mbps的平均吞吐量,能够满足可靠传输的要求并具有良好的实时性。
1.引言随着新一轮制造业的变革与科技革命的到来,制造业需要向智能化、数字化加快转变,工业生产中工业相机的应用顺应了这一时代潮流,通过工业相机将产品制造、物流、销售等各个环节加以控制,从而提升生产与工作效率,为了能够对相机进行实时控制以及数据获取,需要为管理软件和相机之间的通信提供可靠的数据传输机制。
常用的相机数据通信协议有GigE Vision、CoaXPress、Camera Link等等,GigE Vision协议基于UDP协议开发,是一种高性能工业相机接口标准,相比其他协议,它有更好的兼容性(吴远波,黄劼,辛军强,一种基于GigE Vision的多路图像采集系统设计:信息与电脑,2018),可以提供更长的传输距离,可以使用价格低廉的标准以太网线缆进行快速的数据通信(Thryft,Ann R.GigE Vision expand in machine vision:Test & Measurement World,2008)。
UDP协议是在网络层IP协议的基础上,增加了多路复用/分解和差错校验功能,所以只能为上层调用它的应用程序提供不可靠、无连接、基于数据报的服务(James F.Kurose,Keith puter Networking:A Top Down Approach:Boston:PEARSON Education,2013)。
如何使用GigE Vision相机抓拍图像

本文档用于说明PC机第一次和相机相连的设置
1.确保相机和电脑之间通过千兆网线相连,之间经过的网线接头、交换机越少越好。
2.在电脑上安装有LabVIEW和VDM、VAS。
3.关闭windows自带防火墙、360防火墙、杀毒一类软件。
4.打开网卡的巨大帧功能。
右键我的电脑,管理,设备管理器,网络适配器,选择网卡,
右键,属性,高级,属性,巨型帧,更改值为最大,一般为9KB MTU。
如果网卡不支持巨帧,可以尝试调小网络包的大小。
在Max中,点击相机,在获取属性中,更改包大小,可以尝试更改为2000或者1000.
5.使用相机自带的软件先进行测试。
a)把相机的IP地址设至为与电脑同一IP段。
即IP地址前三位一样。
b)采集连续图像。
6.在Max中查看已经连接好的相机,如果没有安装相机本身的驱动,连接了一个相机就
会有一个相机,如果安装了驱动,会有N+1个相机,
7.使用抓拍标定图像.VI来抓拍图像。
1、选择正确的相机2、选择想要保存的基础路径3、
运行vi。
GigE Vision之千兆网工业摄像机及千兆网的应用优点

GigE Vision(GEV)之千兆网工业摄像机及千兆网的应用优点一、GigE Vision(GEV)之千兆网工业摄像机的应用优点1、很理想的传输距离由于Cameralink和LVDS等摄像头与PC机之间的连接是点对点连接、传输距离短(无中继10-20米)、价格昂贵,并且LVDS这种接口因其外形大、携带不方便、不通用等劣势,在2010年后逐步被淘汰,Cameralink现在的使用率也不是很高,除少数特定要求还在使用外其它需求基本被千兆网接口和USB 接口所代替,如MV-EM\E系列千兆网工业相机,体积仅为29*29mm,分辨率从30万像素到2900万像素可选,外观精巧、携带方便、高性价比,已在市场上被广泛应用,因此Cameralink和LVDS接口用于产品检测、质量控制、机器视觉等工业领域的图像处理系统就会有局限性,性价比极低。
MV-EM系列千兆网工业相机千兆网工业摄像机可通过100米标准的5类及以上局域网电缆与PC机连接起来。
通过光纤连接器,信号能够传递更远。
具有稳定、低隐患、高可靠性等优势。
如加一个很便宜的千兆网交换机,信号也能够传递更远。
2、高度集成,不需要图像采集卡(A\D转换)。
通常每一个工业摄像头都需要要有一个独立的PC机和图像采集卡,才能够采集图像进行处理,组成机器视觉系统,这样就增加了维护成本和系统的不稳定性。
千兆网工业摄像机只需要有千兆网卡就可工作,目前主流的PC主板都已自带千兆网卡可以很方便的进行连接。
3、多种千兆网联接方式①单个摄像机和单个PC机之间的连接②单个摄像机和多个PC机之间的连接③多个摄像机和单个PC机之间的连接图(1)图(2)图(3)MV-EM系列千兆网接口多相机DEMO二、千兆网的应用优势1、远距离无中继情况下可达100m,使用交换机或者光纤可达更远2、低成本①标准化的以太网设备,使得成本可以控,在工业费用预算内。
②维护费用低。
③较低的PC管理费用,办公级,配件需求少3、带宽高1Gb/s,108MB/s图像数据传输,适合当前90%的机器视觉应用4、超高的网络灵活性对于不同应用,工业摄像头到PC的连接和处理方法可以随意剪裁5、较低复杂度工业标准PC和以太网网络设备,通用性好。
GigE Vision 2.0说明书

目錄引言 (1)第1章設備發現 (2)1.1 鏈路選擇 (2)1.2 IP位元址配置 (3)1.3 設備枚舉 (3)1.4 設備添加與刪除 (4)第2章 GVCP協議 (5)2.1 基本概念 (5)2.2 通道 (5)2.3 其他 (11)第3章引導寄存器 (14)3.1 引導寄存器 (14)3.2 相機的標準特徵表 (22)引言GigE Vision 是一種通信介面標準,可用於各種網路拓撲上的視覺軟體與視頻流設備間的交互。
該標準是基於UDP/IP協議體系,並構成了Gige Vision 協議(工作在應用層,包括GVCP和GVSP兩個協議)。
需要的設備包括IP網路上各種軟硬體攝像機、處理器、路由器等。
本說明中,設備指的是一個GigE Vision相容的可控設備,而應用程式指運行在一台主機上的一個與GigE Vision相容的控制程式。
本說明分三部分,即設備發現、GVCP協定和引導寄存器,分別在對應的章節中介紹。
第1章設備發現PC在接入設備時,需要一種機制發現設備,即鏈路選擇、IP位址配置、設備枚舉。
1.1 鏈路選擇設備在接入PC後,需要確定所有通信鏈路哪些是可用的,然後與PC端協調選擇相應速率的鏈路。
共提供了4種不同類型的物理鏈路配置:①單鏈路配置SL②多鏈路配置ML③靜態鏈路聚合組配置sLAG④動態鏈路聚合組配置dLAG其中,頭2個配置中,每個物理鏈路介面都有1個不同的IP位址;對於後2個配置,物理介面經過重組後,只有1個IP位址在程式中可見,物理鏈路的分組在MAC層執行,對於應用軟體是透明的。
1.1.1 單鏈路配置最簡單的配置,所有的流通道加到一個有效物理鏈路上,所有設備必須支援SL配置。
1.1.2 多鏈路配置一個設備必須最多支援4個不同的網路介面。
介面#0(唯一支援GVCP)為主介面來控制設備的控制與消息通道,如設備發現總是在#0上執行,以確保設備使用不同的IP位址而不被多次發現。
其他介面只支援附加的流通道,如發送或接收GVSP資料包。
gige 接口 标准
gige 接口标准
"GigE" 是指千兆以太网(Gigabit Ethernet)接口,用于数据通信,特别是在图像采集和处理领域中,常用于工业相机等设备。
以下是对GigE接口标准的详细介绍:
速率:
GigE接口支持千兆比特每秒(Gbps)的数据传输速率,提供高带宽的网络连接。
物理连接:
使用标准的RJ-45插座,类似于常见的以太网连接。
这使得它在现有的网络基础设施中更容易集成。
协议标准:
基于IEEE 802.3协议标准,与传统的以太网技术兼容。
这意味着它可以与其他以太网设备进行互操作。
数据帧格式:
遵循以太网数据帧格式,但在数据帧头部有特定的GigE Vision协议标识,以支持图像传输和设备控制。
GigE Vision标准:
为工业相机等设备提供了一个通用的图像传输和设备控制标准,确保了兼容性和互操作性。
GigE Vision定义了设备发现、图像传输和设备控制等方面的标准协议。
远距离传输:
GigE接口支持远距离传输,允许设备与计算机之间的连接距离达到几百英尺。
网络兼容性:
由于基于以太网标准,GigE设备可以连接到企业网络中,实现分
布式图像采集和处理。
驱动程序和软件支持:
有丰富的驱动程序和软件支持,包括用于设备控制、图像采集和数据处理的库和工具。
实时性能:
虽然GigE提供了高带宽,但由于以太网的共享特性,对于一些对实时性能要求较高的应用,可能不如一些专用的实时通信接口。
GigE接口的广泛应用使其成为工业图像采集领域的一种常见选择,尤其是在需要高带宽、灵活性和网络兼容性的场景中。
千兆网工业相机之GigE接口介绍
千兆网工业相机技术之Gigabit Ethernet (GigE)接口介绍关键词:GIge接口介绍,GIGE技术
GigE 接口是工业应用所新开发的一种图像接口技术,以Gigabit Ethernet 协议为标准,主要用做高速、大数据量的图像传输,远距离图像传输及降低远距离传输时电缆线的成本。
可通过一台控制单元对多台千兆网工业相机进行图像采集,目前千兆网工业相机已逐步代替其他接口成为主流,MV-EM\VE系列产品是基于该接口研发生产的中高端千兆网工业相机。
1、全球标准
在全球网络连接中占97%
2、独立全双工连接
连接之间无带宽共享,这不是第一流的链路
通过电缆或者光纤实现双向连续数据传输
3、较高的可扩展性
10/100 Mb/s, 1 Gb/s (GigE), 10 Gb/s (10GigE)
3、高级的QoS特性
适合对延时要求较高的传输(语音,视频)
核心协议可以扩展来支持高性能应用
4、高可靠性
错误控制和包重发能力。
工业相机的使用方式
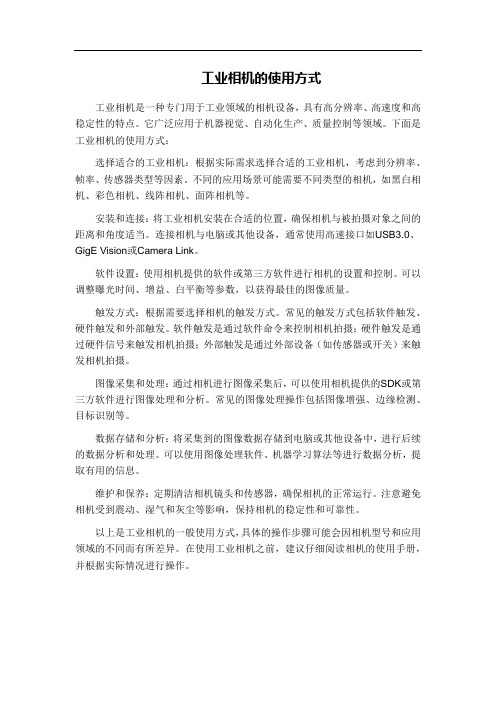
工业相机的使用方式工业相机是一种专门用于工业领域的相机设备,具有高分辨率、高速度和高稳定性的特点。
它广泛应用于机器视觉、自动化生产、质量控制等领域。
下面是工业相机的使用方式:选择适合的工业相机:根据实际需求选择合适的工业相机,考虑到分辨率、帧率、传感器类型等因素。
不同的应用场景可能需要不同类型的相机,如黑白相机、彩色相机、线阵相机、面阵相机等。
安装和连接:将工业相机安装在合适的位置,确保相机与被拍摄对象之间的距离和角度适当。
连接相机与电脑或其他设备,通常使用高速接口如USB3.0、GigE Vision或Camera Link。
软件设置:使用相机提供的软件或第三方软件进行相机的设置和控制。
可以调整曝光时间、增益、白平衡等参数,以获得最佳的图像质量。
触发方式:根据需要选择相机的触发方式。
常见的触发方式包括软件触发、硬件触发和外部触发。
软件触发是通过软件命令来控制相机拍摄;硬件触发是通过硬件信号来触发相机拍摄;外部触发是通过外部设备(如传感器或开关)来触发相机拍摄。
图像采集和处理:通过相机进行图像采集后,可以使用相机提供的SDK或第三方软件进行图像处理和分析。
常见的图像处理操作包括图像增强、边缘检测、目标识别等。
数据存储和分析:将采集到的图像数据存储到电脑或其他设备中,进行后续的数据分析和处理。
可以使用图像处理软件、机器学习算法等进行数据分析,提取有用的信息。
维护和保养:定期清洁相机镜头和传感器,确保相机的正常运行。
注意避免相机受到震动、湿气和灰尘等影响,保持相机的稳定性和可靠性。
以上是工业相机的一般使用方式,具体的操作步骤可能会因相机型号和应用领域的不同而有所差异。
在使用工业相机之前,建议仔细阅读相机的使用手册,并根据实际情况进行操作。
GigEVision与GenICam的关系及工业相机的POE供电

GigEVision与GenICam的关系及工业相机的POE供电如今的视觉领域工业相机包含了很多的功能,而不仅仅是采集图像。
对于机器视觉相机来说,处理图像并把结果附加到图像数据流上,控制附加的硬件,代替应用程序作实时的处理等都是很平常的事情。
这也导致了相机的编程接口变得越来越复杂。
GenICam的目标是为所有类型的相机提供一个统一的编程接口。
无论相机使用的是哪种传输协议或者实现了哪些功能,编程接口(API)都是一样的欧洲机械视觉协会(EMVA)颁布了GenICam标准,它是与GigEVision 很接近的。
通过EMVA,GenICam的目标是为各种各样的相机提供通用的编程接口,MICOVISION MV-EM\E系列千兆网工业相机完全按照GenICam标准研发生产。
GenICam标准有许多个模块组成。
GenApi模块配置相机,它应该与其他任何接口技术—GigEVision,Camera Link,1394 DCAM等等,和采用的特性一样才行。
尽管GenICam标准不是专门针对使用千兆以太网,但是任何GigEVision设备必须提供一个XML设备描述文件,他可以与GenApi模块的句法一起编译。
GenICam的特征模板包括针对共同特性而推荐的名称和类型。
传输层获取图像。
之后,DataStream模块翻译可能附加到图像的额外数据。
GenICam标准的第一个版本仅仅包括GenApi模板,其他的将会加入进来。
以简单的方式,相机将能“告诉”处理器,它有哪些板载功能,这些功能怎么样被控制,而不需要学习文档。
一、GenICam组成GenApi –XML描述文件,用于设置相机的应用程序开发接口(API)SFNC (The GenICam Standard Features Naming Convention) 标准名称转换规则;GenTL –通用传输层接口,获取图像用的传输层(Transport Layer)协议CLProtocol –定制转换接口.二、GenICam应用三、GenICam 支持各种接口技术各种供应商的产品基于相同的GenICam应用,您可以使用各种接口的相机!三、Gigabit 千兆以太网供电(PoE)单电缆相机提高了工业视觉应用水平,采用PoE技术,打造低成本视觉解决方案,开辟新的应用空间。
小编呕心整理:国内外主流GigE(千兆以太网)工业相机大全

小编呕心整理:国内外主流GigE(千兆以太网)工业相机大全图片来源:CEChina作者 | 刘亚东“GigE工业相机凭借其采用低廉的标准电缆就可以实现长距离高速高带宽传输的优势,在机器视觉领域大行其道,那么您真的了解GigE 吗?目前有哪些GigE相机呢?请看小编的呕心整理!”工业相机是机器视觉系统中的关键组件,其最本质的功能就是将光信号转变成有序的电信号。
选择合适的相机是机器视觉系统设计中的重要环节,GigE工业相机是运用GigE(千兆以太网通信协议)研发设计而成的相机,现受到非常广泛的使用,它究竟有什么特别之处?运用了什么原理?应广大读者需求,本文为大家甄选了常见的GigE工业相机产品,并进行了详解,快来看看吧!首先,什么是GigE Vision?随着大数据所覆盖的范围越来越广,视觉应用也在各个领域呈现出飞速拓展的趋势。
2006年,美国自动化成像协会(AIA)推出了GigE Vision标准,该标准是基于千兆以太网通信协议开发的,经现有的以太网线实现快远距离速图像传输,能实时快速、高带宽地传输大型图像,传输速率达125MB/秒,传输距离达100米。
GigE Vision的安装简便性和高性能使其成为工业应用的理想选择,大多数主要工业视频硬件和软件供应商都开发了符合GigEVision标准的产品。
而这些工业应用不仅对数据吞吐量、传输稳定性有着极高的要求,各种复杂、多变、恶劣的外部环境也是连接应用必须时时面对的挑战。
该标准是基于UDP协议,与普通网络数据包不同之处在于应用层协议,应用层协议采用GVCP(GigE Vision控制协议)和GVSP(GigE Vision流传输协议),分别用来对相机进行配置和数据流的传输。
图像采集系统软件的实现就是基于这两种协议。
GigE工业相机的优势GigE工业相机可以统一机器视觉产品中的几乎所有工业相机的协议,同时还容许其他组织在其基础上开发其他兼容的软件和硬件。
千兆网GigE接口工业相机的优势(整理)
千兆网GigE接口工业相机的优势
关键字:千兆网工业相机, GigE接口工业相机, 维视图像,工业相机
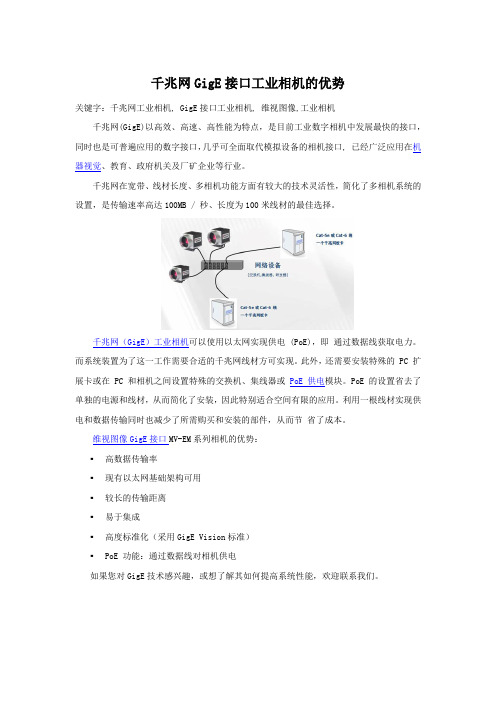
千兆网(GigE)以高效、高速、高性能为特点,是目前工业数字相机中发展最快的接口,同时也是可普遍应用的数字接口,几乎可全面取代模拟设备的相机接口, 已经广泛应用在机器视觉、教育、政府机关及厂矿企业等行业。
千兆网在宽带、线材长度、多相机功能方面有较大的技术灵活性,简化了多相机系统的设置,是传输速率高达100MB / 秒、长度为100米线材的最佳选择。
千兆网(GigE)工业相机可以使用以太网实现供电 (PoE),即通过数据线获取电力。
而系统装置为了这一工作需要合适的千兆网线材方可实现。
此外,还需要安装特殊的 PC 扩展卡或在 PC 和相机之间设置特殊的交换机、集线器或PoE 供电模块。
PoE 的设置省去了单独的电源和线材,从而简化了安装,因此特别适合空间有限的应用。
利用一根线材实现供电和数据传输同时也减少了所需购买和安装的部件,从而节省了成本。
维视图像GigE接口MV-EM系列相机的优势:
▪高数据传输率
▪现有以太网基础架构可用
▪较长的传输距离
▪易于集成
▪高度标准化(采用GigE Vision标准)
▪PoE 功能:通过数据线对相机供电
如果您对GigE技术感兴趣,或想了解其如何提高系统性能,欢迎联系我们。
GigE_Vision_Specifivation_1_0_译文

GigE VisionCamera Interface Standard for Machine VisionVersion v1.01 简介1.1 目的GigE Vision是基于无处不在的因特网技术的应用于图像传输的通信接口。
它提供了通过标准5类线或者其他以太网支持的物理媒介连接GigE Vision器件和网卡的接口。
本文是定义一个GigE Vision器件连接应用程序的协议说明。
该说明是建立在以太网技术之上。
因此本文没有涉及到关于传输媒介的物理层介绍,也没有涉及到其他特殊的高性能的IP堆栈的实现和网络驱动的说明。
GigE Vision系统包含一个宽范围的不同的网络拓展。
最简单是点对点式的GigE Vision 器件通过交叉线缆连接上PC,复杂一点的是GigE Vision相机利用路由器连接在IP网络中。
GigE Vision器件和网络中的其他IP设备要完全兼容,这点是非常重要的。
因此,一定要遵循由IETF的RFE提供的下列指导意见。
尽管这个特殊的说明是参考于千兆以太网,但是它可以被应用于以太网的各个速度等级。
1.2技术协会GigE Vision标准协会成立于2003年,为了定义出一个高性能的开放的基于千兆网的图像应用,GigE是高速,1-Gb/s版本的以太网,世界上处于统治地位的LAN连接协议。
1.3 预定义和缩略词1.3.1 预定义Application-应用程序:在主机上运行的GigE Vision应用程序软件,比如PC。
Control protocol-控制协议:基于GigE Vision协议完成的器件所支持的GigE Vision控制协议(GVCP)定义的指令。
Device-器件:基于GigE Vision协议完成的器件,例如相机。
Gratuitous ARP-无理由的ARP:器件发送的一个ARP请求,用于检测其他器件是否使用了同样的IP地址。
Multihomed-多宿主:如果一个主机由多个IP地址,那么它就被称为多宿主。
GigE Vision接口摄像机及其应用

GigE Vision接口摄像机及其应用花再军;黄凤辰;陈钊【期刊名称】《微型机与应用》【年(卷),期】2011(030)021【摘要】GigE Vision is now a very attractive technology in machine vision industry. Scout series GigE Vision cameras of Basler corporation have outstanding performance and Basler provided a develop package called Pylon driver package,which is easy to use. This article implemented this kind camera in 10 meter water level test platform to get the image of the invar rod and display it on the screen.%GigEVision接口技术成为了机器视觉工业的一项非常具有吸引力的技术,Baslerscout系列GigEVision摄像机具有卓越的性能,Basler提供了Pylon驱动包开发包,可方便用户二次开发。
将该摄像机应用于10In水位试验台铟钢尺图像获取并在计算机上显示。
【总页数】3页(P92-94)【作者】花再军;黄凤辰;陈钊【作者单位】河海大学计算机与信息学院,江苏南京210098;河海大学计算机与信息学院,江苏南京210098;河海大学计算机与信息学院,江苏南京210098【正文语种】中文【中图分类】TP391【相关文献】1.PCIe-GIE62:GigE Vision接口高速图像采集卡 [J],2.凌华推出首款GigE Vision接口高速图像采集卡 [J],3.凌华科技领先同行推出首款GigE^TM Vision接口高速图像采集卡 [J],4.GigE Vision^(TM)摄像机即将登场ITS领域 [J], 周洪波5.GigE Vision接口高速图像采集卡PCIe—GIE62 [J],因版权原因,仅展示原文概要,查看原文内容请购买。
GigE_Vision_Specifivation_1_0_译文

GigE_Vision_Specifivation_1_0_译文GigE VisionCamera Interface Standard for Machine VisionVersion v1.01 简介1.1 目的GigE Vision是基于无处不在的因特网技术的应用于图像传输的通信接口。
它提供了通过标准5类线或者其他以太网支持的物理媒介连接GigE Vision器件和网卡的接口。
本文是定义一个GigE Vision器件连接应用程序的协议说明。
该说明是建立在以太网技术之上。
因此本文没有涉及到关于传输媒介的物理层介绍,也没有涉及到其他特殊的高性能的IP堆栈的实现和网络驱动的说明。
GigE Vision系统包含一个宽范围的不同的网络拓展。
最简单是点对点式的GigE Vision 器件通过交叉线缆连接上PC,复杂一点的是GigE Vision相机利用路由器连接在IP网络中。
GigE Vision器件和网络中的其他IP设备要完全兼容,这点是非常重要的。
因此,一定要遵循由IETF的RFE提供的下列指导意见。
尽管这个特殊的说明是参考于千兆以太网,但是它可以被应用于以太网的各个速度等级。
1.2技术协会GigE Vision标准协会成立于2003年,为了定义出一个高性能的开放的基于千兆网的图像应用,GigE是高速,1-Gb/s版本的以太网,世界上处于统治地位的LAN连接协议。
1.3 预定义和缩略词1.3.1 预定义Application-应用程序:在主机上运行的GigE Vision应用程序软件,比如PC。
Control protocol-控制协议:基于GigE Vision协议完成的器件所支持的GigE Vision控制协议(GVCP)定义的指令。
Device-器件:基于GigE Vision协议完成的器件,例如相机。
Gratuitous ARP-无理由的ARP:器件发送的一个ARP请求,用于检测其他器件是否使用了同样的IP地址。
视频记录仪
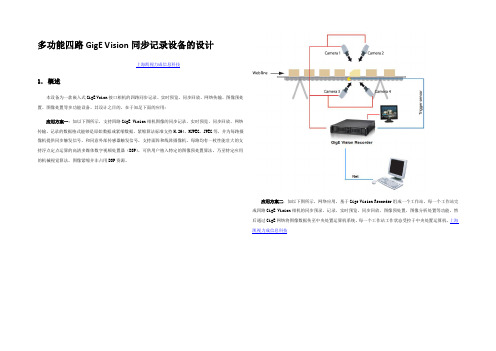
多功能四路GigE Vision同步记录设备的设计上海凯视力成信息科技1.概述本设备为一款嵌入式GigE Vsion接口相机的四路同步记录、实时预览、同步回放、网络传输、图像预处置、图像处置等多功能设备。
其设计之目的,在于知足下面的应用:应用方案一:如以下图所示,支持四路GigE Vision相机图像的同步记录、实时预览、同步回放、网络传输。
记录的数据格式能够是原始数据或紧缩数据,紧缩算法标准支持H.264、MJPEG、JPEG等,并为每路摄像机提供同步触发信号,和同意外部传感器触发信号,支持面阵和线阵摄像机。
每路均有一枚性能壮大的支持浮点定点运算的高清多媒体数字视频处置器(DSP),可供用户植入特定的图像预处置算法,乃至特定应用的机械视觉算法。
图像紧缩并非占用DSP资源。
应用方案二:如以下图所示,网络应用,基于Gige Vision Recorder组成一个工作站,每一个工作站完成四路GigE Vision相机的同步预录、记录、实时预览、同步回放、图像预处置、图像分析处置等功能,然后通过GigE网络将图像数据传至中央处置运算机系统。
每一个工作站工作状态受控于中央处置运算机。
上海凯视力成信息科技本设备的意义在于:(1)GigE Vision相机是基于GigE网络,因此,若是多个相机应历时,这些相机遇共享一个1G带宽,因此降低了运算机取得图像的帧率或分辨率,为了解决那个问题,从而又显现了多网口的GigE Vision 帧捕捉卡(而本来GigE Vision的一个优势确实是取消帧捕捉卡)。
本设备多路图像的同步预录、记录及预处置功能,完全取代GigE Vision捕捉卡的功能,并使得机械视觉处置运算机在图像捕捉和预处置方面的负担近一步降低且与路数无关,同时保证了处置的实时性。
(2)机械视觉处置运算机若是要实现高清图像的实时同步记录并非是件很容易的情形,除增加研发的周期和精力外,还会使得处置运算机CPU的负担更进一步加重。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.3 显示图像与缩放 从摄像机获得的图像是YUV格式的,首先要将YUV信号转换为RGB信号,可调用Pylon驱动包提供的YUV信号转RGB的函数[2]。在中调用CreatCompatibleDC创建一个内存设备上下文.SelectObject函数,将与设备无关的位图选入内存设备上下文中;然后调用BitBlt函数在内存设备上下文和屏幕设备上下文中进行位图考贝,实现图像显示[4]。 要实现图像的缩放就要进行图像插值,采用了最邻近插值算法[4]。所设计的程序界面。
本文采用的是Pylon2.1版本的开发包,使用MS Visual Studio 2003或者2005进行应用程序的开发,在开发之前要做以下准备工作: (1)包含路径 在编译器中添加以下两个路径: $(PYLON_ROOT)\include $( PYLON_ROOT)\..\genicam\library\cpp\include (2)库路径和库文件 #include <pylon/PylonIncludes.h> 该文件包含了必须的#pragma comment lib语句。 在连接器搜索路径中添加以下路径以找到.lib文件: $(PYLON_ROOT)\lib\win32 $(PYLON_ROOT)\..\genicam\library\CPP\Lib\WIn32_i86 (3)设置环境变量 Pylon开发包安装过程中设置了以下的环境变量: PYLON_ROOT:用于定位Transport Layer库; GENICAM_ROOT_V1_1: 用户定位GenApi Node Maps所在库; GENICAM_CACHE: 描述了GenApi的XML文件缓存的位置。3 应用程序开发 本次使用的相机型号是scA640-74gm/gc,分辨率为659×494。采用基于对话框的MFC应用程序开发,主要完成图像的显示和缩放。Pylon提供了Transport Layer作为物理接口的抽象,它有访问相机设备的驱动。Transport Layer提供以下功能[2]:(1)设备发现;(2)读写相机寄存器;(3)抓取图像;(4)配置传输层;(5)创建Camera对象;(6)删除Camera对象。 Transport Layer对象用于:(1)枚举Camera设备;(2)创建Camera对象;(3)访问Transport Layer参数。枚举可用的Transport Layer和创建Transport Layer对象由Pylon::CTlFactory类完成。为了方便起见,也提供枚举所有多个Transport Layer上可用的相机的方法和不需要Transport Layer对象创建相机设备的方法。Pylon中物理相机设备由Camera对象代表。Camera对象由Transport Layer对象或者Pylon::CTlFactory类创建。为了从数据流中抓取图像,需要流抓取器对象。流抓取器对象由Camera对象管理。获取图像和显示的流程。
Basler Scout系列以太网接口摄像机应用了高质量的Sony CCD传感器,支持从VGA到200万像素的分辨率和具有体积小设计牢靠的特点,能够方便地集成到用户的机器视觉系统。使用Gigabit以太网带宽可获得最高70帧/s的速度。使用CAT6电缆,经过测试图像传送距离可达100 m。1.2 Basler Pylon驱动包 Pylon驱动包(Pylon Driver Package)是为所有的具有FireWire和GigE接口的Basler相机设计的,可以选择最适合应用的接口技术或者两者同时使用。Pylon驱动提供可靠实时的图像数据传输到PC存储器而只需要很低的CPU负担。Pylon开发包结构图。
Pylon内部结构基于GenICam技术,Pylon API 2.1支持GenIcam标准的1.1版本,它提供了很简单的访问新的摄像机模型的方法。GenICam的核心是用XML描述文件对相机属性的描述。使用该文件,解释器能直接产生叫做GenAPI的C++应用程序接口(API)和图形用户接口(GUI)的元件。这使得用户可方便地鉴别相机类型以及详细的特性和所支持的功能以及功能参数。 Pylon GigE Vision驱动快速地把图像数据从网络上的数据中分离开,使得应用程序能用很低的CPU负担获得可用的图像数据,驱动只能用于有特定Intel芯片的网卡。Pylon GigE Vision滤波器驱动支持各种硬件、GigE网卡和主板上的GigE端口。利用最新的驱动栈技术,Basler增加了服务质量(QoS)超过了微软(Microsoft)的标准。Pylon Viewer软件提供了方便的测试评估Basler相机的应用程序。2 使用Pylon驱动包
3.1 相机设置 (1)设置相机的感兴趣区域(AOI)设置相机分辨率为最大; (2)关闭触发,采用连续捕获; (3)设置自动曝光以适应不同强度的光线。 代码参考如下[3]:m_pCamera = m_pTlFactory->CreateDevice (m_devices[m_ixCamera]);//创建Camera对象m_pStreamGrabber=m_pCamera->GetStreamGrabber(0);//创建图像抓取器m_pCamera->Open ();//打开Camera对象m_pStreamGrabber->Open ();//打开图像抓取器m_pCameraNodeMap = m_pCamera->GetNodeMap();//获取Camera节点图//Set AOICIntegerPtr ptrOffsetX=m_pCameraNodeMap->GetNode("OffsetX");//获取X方向偏移节点CIntegerPtr ptrOffsetY=m_pCameraNodeMap->GetNode("OffsetY");//获取Y方向偏移节点CIntegerPtr ptrAoiWidth=m_pCameraNodeMap->GetNode ("Width");//获取宽度节点CIntegerPtr ptrAoiHeight=m_pCameraNodeMap->GetNode ("Height");//获取高度节点m_AoiSize.cx=(ptrAoiWidth->GetMax());//图像最大宽度m_AoiSize.cy=(ptrAoiHeight->GetMax());//图像最大高度m_AoiSize.cx=m_AoiSize.cx & ~3;ptrOffsetX->SetValue(0);//X偏移设置为0ptrOffsetY->SetValue(0);//Y偏移设置为0ptrAoiWidth->SetValue(m_AoiSize.cx);//图像宽度设置ptrAoiHeight->SetValue(m_AoiSize.cy);//图像高度设置CEnumerationPtr ptrTriggerSelector= m_pCameraNodeMap->GetNode("TriggerSelector");ptrTriggerSelector->FromString("AcquisitionStart");CEnumerationPtr ptrTriggerMode=m_pCameraNodeMap->GetNode("TriggerMode");ptrTriggerMode->FromString("Off");CEnumerationPtr ptrAcquisitionMode=m_pCameraNodeMap->GetNode("AcquisitionMode");ptrAcquisitionMode->FromString("Continuous");CEnumerationPtr ptrExposureMode=m_pCameraNodeMap->GetNode("ExposureMode");ptrExposureMode->FromString("Timed");CEnumerationPtr ptrExposureAuto=m_pCameraNodeMap->GetNode("ExposureAuto");ptrExposureAuto->FromString("Continuous");3.2 获取图像数据的流程 获取图像的流程。