雷达天线伺服控制系统要点
PID雷达天线控制系统
自动控制理论课程设计报告研究课题PID雷达天线控制系统学院专业班级姓名学号年月PID雷达天线控制系统摘要:这篇文章是把PID调节器运用于雷达位置伺服系统,使其跟踪能力和迅速反应能力得到改善。
采用校正数字PID 控制器作为控制器,通过Matlab 仿真对校正 PID 控制雷达天线系统响应曲线进行分析,结果表明,基于校正 PID 控制的雷达天线系统响应时间短,满足了雷达天线对控制性能的要求。
关键词:PID 控制;雷达天线系统。
PID radar antenna control systemAbstract:This article is to put PID adjustor into the radar servo system, and improve the tracking ability and rapid response ability.we choose the digital PID controller as controller.Through the simulation of Matlab to design of the calibration PID control radarantenna system and analyse the radar antenna system calibration PID response curve. Results show that based on the calibration of the PID control system of the radarantenna short response time meet the radar antenna to control performance requirements.Key words: P ID adjustor ; Radar antenna system.1.引言:在自动控制系统中,要提高系统的静态精度,增大放大倍数,但系统增大放大倍数后,由于系统中惯性的影响,容易使系统发生振荡,因此,提高放大倍数,减小静态误差和提高系统稳定性便成了一对主要矛盾。
浅谈雷达伺服系统的设计
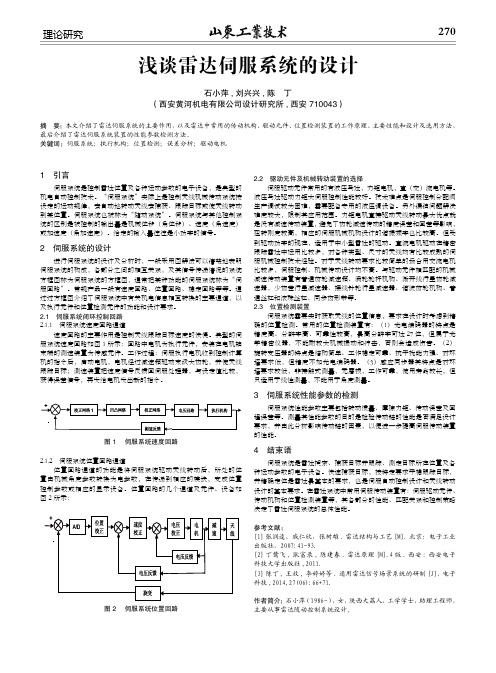
270理论研究浅谈雷达伺服系统的设计石小萍,刘兴兴,陈 丁(西安黄河机电有限公司设计研究所,西安 710043)摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机1 引言 伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的机电自动控制技术。
“伺服系统”实际上是控制天线机械传动系统按设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动到某位置。
伺服系统也被称为“随动系统”。
伺服系统与其他控制系统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)或加速度(角加速度)。
给定的输入量往往是小功率的信号。
2 伺服系统的设计 进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺服回路”。
常规产品一般有速度回路、位置回路、稳定回路等等。
通过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以及执行元件和位置检测元件的功能和设计要求。
2.1 伺服系统闭环控制回路2.1.1 伺服系统速度回路通道 速度回路的主要作用是控制天线跟踪目标速度的快慢。
典型的伺服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴末端的测速装置为传感元件。
工作过程:伺服执行电机收到控制计算机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择 伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。
技术难点是伺服控制分配阀生产调试较为困难,需要配备专用的液压调设备。
二维雷达转台伺服控制系统的设计与开发
二维雷达转台伺服控制系统的设计与开发二维雷达转台伺服控制系统的设计与开发引言随着科技的不断进步和应用的广泛推广,雷达技术在军事、民用、科研等领域起着重要作用。
而二维雷达系统中的转台伺服控制系统是实现雷达目标跟踪和测量的关键部分。
本文将介绍二维雷达转台伺服控制系统的设计与开发过程,通过分析系统的结构、功能和工作原理,进一步提升系统的控制性能和稳定性。
一、系统设计理念和要求二维雷达转台伺服控制系统的设计是基于对雷达运行过程中需要实现的目标跟踪和测量要求的分析。
系统要求具备以下特点:1.精确性:转台伺服控制系统需要能够精确定位并跟踪目标,准确测量目标与雷达之间的距离和方位角。
2.稳定性:系统需要具备稳定的控制性能,能够快速响应信号,抵抗外界干扰和噪声。
3.可靠性:转台伺服控制系统要求具备高可靠性,保证雷达在长时间运行中的稳定性和准确性。
4.可扩展性:系统需要能够灵活适应不同工作环境和场景的需求,并具备可扩展性。
二、系统结构设计基于对系统设计理念和要求的分析,我们提出了以下系统结构设计方案:1.硬件结构:转台伺服控制系统由转台部分、伺服电机、传感器和控制器等组成。
其中转台部分实现转动功能,伺服电机驱动转台运动,传感器用于获取目标信息,而控制器根据传感器数据实现对伺服电机的精确控制。
2.软件结构:软件部分主要是指转台控制算法和数据处理模块。
转台控制算法主要根据传感器数据计算出目标的位置,再通过控制器将控制信号传递给伺服电机实现转台的定位和跟踪。
数据处理模块负责对获取的数据进行处理和分析,提取有效信息并进行存储和显示。
三、系统功能设计基于系统的设计理念和要求,我们确定了以下系统功能设计:1.目标跟踪功能:通过传感器获取目标的信息,计算目标的位置和方位角,并通过控制算法实现对伺服电机的控制,实现目标的准确跟踪和定位。
2.测量功能:通过传感器获取雷达和目标之间的距离和方位信息,根据传感器数据进行精确计算,实现目标与雷达的测量。
最优控制在雷达伺服电机的应用

在相平面绘制状态轨迹如图所示
x2
γ-
R-
R+
x1
γ+
虚线γ -和实线γ +组成最优开关线γ ,最优开关线γ 将相 平面分为两部分R+和R-,设P(x1,x2)为状态空间的任一点,
• 则最优控制满足如下规律: • u*(t)=+1,当P∈R+∪γ + • u*(t)=-1,当P∈R-∪γ • 当x(0)在γ +上的时候
b atf b x 2(tf ) ( x 20 )e a a x 2(tf ) 0 1 b tf ln a b ax20
同理可得出,初始状态x(0)可能分布在γ 开关线上或者 在R+或R-区域内,计算分别在不同位置时到达相平面原点 的最优时间tf
a ( ax10 x 20 ) b
e 1 1 e
a ( ax10 x 20 ) b
a ( x 20 1) b , X 0 R a ( x 20 1) b , X 0 R
1 b 1 tf0 b)e a
(t ) Ax(t ) Bu(t ) x
• 其状态是完全能控的,使系统从已知初态x(0)=x0转移到状 态空间原点 • 的时间最短。
x(tf ) 0
J dt tf t 0
t0 tf
• 取极小值,其中A为状态转移矩阵;B为控制矩阵;t0,tf • 分别为初始时刻与终端时刻;u(t)为控制向量。 • 容许控制向量受约束: |u(t)|≦1 • 设u*(t)是时间最优控制,边界条件是 x(t0)=x0,x(tf)=0 本问题中A的特征值均为实数,时间最优控制u*(t)存在,那 么可求得最优控制在边界值的切换次数 N≦n-1=1
伺服控制6大注意事项,搞懂了也没什么难的!
伺服控制6大注意事项,搞懂了也没什么难的!(一)伺服电机的控制模式选择1. 转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如 10V 对应 5Nm 的话,当外部模拟量设定为 5V 时电机轴输出为 2.5Nm:如果电机轴负载低于2.5Nm 时电机正转,外部负载等于2.5Nm 时电机不转,大于2.5Nm 时电机反转(通常在有重力负载情况下产生)。
可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
2. 位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
3. 速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID 控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加整个系统的定位精度。
4. 全闭环控制模式:全闭环控制是相对于半闭环控制而言的。
首先我们来了解下半闭环控制,半闭环是指数控系统或PLC发出速脉冲指令。
伺服接受指令,然后执行,在执行的过程中,伺服本身的编码器进行位置反馈给伺服,伺服自己进行偏差修正,伺服本身误差可避免,但是机械误差无法避免,因为控制系统不知道实际的位置。
而全闭环是指伺服接受上位控制器发出速度可控的脉冲指令,伺服接受信号执行,执行的过程中,在机械装置上有位置反馈的装置,直接反馈给控制系统,控制系统通过比较,判断出与实际偏差,给伺服指令,进行偏差修正,这样控制系统通过频率可控的脉冲信号完成伺服的速度环控制,然后又通过位置传感器(光栅尺、编码器)完成伺服的位置环控制,这种把伺服电机、运动控制器、位置传感器三者有机的结合在一起的控制模式称之为全闭环控制。
雷达天线及伺服系统
3.2 天线的分类
• 按工作性质: • 发射天线;接收天线
• 按波长: • 长波天线;中波天线;短波天线;微波天 线等
• 按天线原理: • 线天线;面天线
• 按波束扫描: • 机械扫描;电扫描(相控阵天线)
二、面天线
• 旋转抛物面天线 • 卡塞格伦(Cassegrain)天线
1、旋转抛物面天线
旋转抛物面天线是在通信、 雷达和射电天文等 系统中广泛使用的一种天线, 它是由两部分组成的,
其一:抛物线绕其焦轴旋转而成的抛物反射面, 反射 面一般采用导电性能良好的金属或在其它材料上敷以 金属层制成;
其二:置于抛物面焦点处的馈源(也称照射器)2
λ=波长; A=天线的实际面积; ρe=天线的口 径效率
3.3.5 天线的阻抗
• 天线输入阻抗:Zm=Rm+j*Xm, • 实部:电阻,功率损耗 • 虚部:阻抗,储存功率
• 天线的输入阻抗与发射机的内阻匹配时,可 得到最大输出功率;同理,接收时,接收机 可从天线获得最大输出。
The Cassegrain Antenna
• Advantages • The feed radiator is more easily supported and the antenna is geometrically compact. • It provides minimum losses as the receiver can be mounted directly near the horn.
馈源把高频导波能量转变成电磁波能量并投向抛物反 射面, 而抛物反射面将馈源投射过来的球面波沿抛物 面的轴向反射出去, 从而获得很强的方向性。
自动控制原理-雷达天线伺服控制系统

自动控制理论课程设计设计题目雷达天线伺服控制系统姓名学号专业班级指导教师设计时间目录第一章绪论 (1)1.1课题背景及意义 (1)1.2课题研究的目的 (1)1.3课题研究的主要内容 (2)第二章系统的总体设计 (3)2.1系统的组成图 (3)2.2控制系统的结构图 (3)2.3系统的简化方框图及简单计算 (4)2.4系统的动态分析 (6)第三章系统的根轨迹和伯德图 (7)3.1系统的根轨迹图及分析 (7)3.2系统的Bode图及分析 (8)第四章校正设计 (10)4.2校正后的根轨迹图及分析 (12)4.2校正后的Bode图及分析 (13)第五章总结 (15)参考文献 (16)第一章绪论1.1课题背景及意义雷达天线伺服控制系统是用来控制天线,使之准确地自动跟踪空中目标的方向,也就是要使目标总是处于天线轴线的方向上的,用来精确地跟随或复现某个过程的反馈控制系统,又称随动系统,主要解决位置跟随系统的控制问题。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度,加速度的反馈控制系统,并要求具有足够的控制精度。
其作用是使输出的机械位移(或转角)准确地跟踪输入地位移(或转角)。
伺服系统的结构组成和其他形式反馈控制系统没有原则上的区别,它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
雷达天线伺服控制系统,可以准确确定障碍物的位置。
利用雷达天线伺服控制系统可以探测飞机、舰艇、导弹以及其他军事目标,信息处理、数字处理,收集、综合地面运动目标和固定目标的情报及图像,还可以探测低空飞行的威胁,为用户提供包含面广的威胁画面。
对空搜索、边搜索边测距、空地测距、自动检测;除了军事用途外,雷达在交通运输上可以用来为飞机、船只导航;在天文学上可以用来研究星体;在气象上可以用来探测台风,雷雨,乌云等等。
雷达天线伺服控制系统的优点是白天黑夜均能探测远距离的目标,且不受雾、云和雨的阻挡,具有全天候、全天时的特点,并有一定的穿透能力。
自动控制原理课程设计-雷达天线伺服控制系统要点

雷达位置伺服系统校正班级: 0xx班学号: xx姓名: xx指导老师: x老师—2011.12雷达位置伺服系统校正一、雷达天线伺服控制系统(一) 概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
图1-1 雷达天线伺服控制系统原理图(二) 系统的组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、执行机构。
以上部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析: 1、受控对象:雷达天线; 2、被测量:角位置m θ;3、给定值:指令转角*m θ;4、传感器:由电位器测量m θ,并转化为U ;5、控制器:放大器,比例控制;6、执行器:直流电动机及减速箱。
雷达天线伺服控制系统
雷达天线伺服控制系统
雷达是一种通过将电磁波辐射向目标物体并接收反射波来检测其位置和速度的设备。
雷达天线是雷达系统的重要组成部分,它将电磁波辐射出去,并接收目标物体反射回来的
信号。
雷达天线伺服控制系统的主要作用是使雷达天线保持在目标物的方向上,并能够跟
随目标物的运动轨迹进行调整。
雷达天线伺服控制系统由电机、编码器、控制器等组成。
电机通过传动系统控制雷达
天线的角度,编码器用于反馈雷达天线的角度信息,控制器则根据编码器反馈的信息,控
制电机的转动并保持天线的位置与目标物保持一致。
雷达天线伺服控制系统的优点是精度高、反应迅速、可靠性强、适应性好。
该系统可
以根据各自的需求设置不同的工作模式,以适应不同复杂的环境条件。
当雷达天线工作在
垂直方向的情况下,需要较高的精确度和控制灵敏度。
当雷达天线工作在水平方向时,需
要更快的相应速度和更小的误差范围。
在这种系统中,控制器是枢纽和核心,它对电机、编码器和其他传感器进行信号的采集、处理、分析和判断,并输出控制命令,实现天线角度的控制和跟随。
此外,控制器还
可以提供反馈信息和故障报警标志,对系统的安全性和稳定性起到重要的作用。
总之,雷达天线伺服控制系统具有重要的作用。
这种系统可以确保雷达天线达到准确、快捷、灵活的聚焦目标物的能力,以满足人们对雷达设备的多种应用需求。
为了达到最佳
的工作效率和性能,该系统必须受到严格的质量控制和保养,以保证其安全性和可靠性。
一种雷达天线伺服系统的控制实现方式

一种雷达天线伺服系统的控制实现方式熊文芳;施治国;袁君【摘要】随着相控阵雷达的广泛应用,雷达天线工作方式从圆周扫描到目标跟踪扫描切换的需求越来越普遍。
为了减少切换过程中的时间损失,保证对目标的连续稳定跟踪,本文提出了一种兼容速度控制与位置控制的伺服系统实现方式,有效缩短了切换时间。
%With thewidely application of the phased array radar,the need of working mode of the radar antenna which switched from the circumferential scan to the target tracking scan is also increasing.In order to reduce the time loss during the switching process and ensuring continuous and stable tracking of targets,this paper presents a method of realizing the servo system with speed control and position control,which shorten the switching time effectively.【期刊名称】《电子测试》【年(卷),期】2016(000)016【总页数】2页(P29-30)【关键词】相控阵雷达;伺服系统;天线扫描方式;速度控制;位置控制【作者】熊文芳;施治国;袁君【作者单位】荆州南湖机械股份有限公司,434000;荆州南湖机械股份有限公司,434000;荆州南湖机械股份有限公司,434000【正文语种】中文伺服系统为雷达的基本组成部分,一般情况下,对空搜索情报雷达天线作360°圆周扫描,圆周扫描时多采用速度控制方式,实现对天线旋转速度的控制。
雷达天线伺服控制系统讲解

概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图1.2 系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
题目雷达天线伺服控制系统设计与校正_实用模板
课程设计说明书
课程设计说明书
2.4.2 在前向通道中接入饱和非线性环节的Simulink模型及仿真分析
课程设计说明书
由图11与图13对比可得在校正后系统的前向通道中接入饱和非线性环节后超调量轻微减小
2.4.3在前向通道中接入回环非线性环节的Simulink模型及仿真分析 由图11与图15对比可得在接入回环非线性环节后超调量增大,调整时间变大
sys=tf(num,den) nyquist(sys) 由图3分析可知Nyquist轨迹包围点(-1,j0),故校正前 闭环系统不稳定 2.1.5未校正系统的根轨迹分析 用MATLAB进行编程,程序如下
clear;clc num=[2000 100000]
课程设计说明书
den=[1 35 350 1000 0] sys=tf(num,den) rlocus(sys) hold on grid hold on
20XX
题目:雷达天线伺服 控制系统设计与校正
汇报人:xxx
-
目录
课程设计说明书
题目:雷达天线伺服控制系统设计与校正
1PART 1
课程设计说明 书
课程设计说明书
1.课程设计简介 1.1课程设计任务 1. 使学生初步掌握控制系统数字仿真的基本方法 2. 学会利用利用MATLAB语言进行控制系统仿真和辅助设计的基本技能 1.2 课程设计内容 已知某雷达天线伺服反馈控制系统的开环传递函数为:。要求设计系统的校正装置,使系 统达到下列指标:(1)在单位斜坡信号作用下,系统的稳态误差ess≤1%(系统的速度误差 系数 Kv=100s-1;);(2)超调量 Mp<30%,调节时间 Ts<2秒;(3)相角稳定裕度在 Pm >45°,幅值定裕度Gm>20 1.3 课程设计任务要求 1. 画出未校正系统的根轨迹图,分析系统是否稳定
雷达天线伺服控制系统要点
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图1.2 系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
第三章 雷达天线及伺服系统概要
1、旋转抛物面天线旋转抛物面天线是在通信、雷达和射电天文等系统中广泛使用的一种天线, 它是由两部分组成的, 其一:抛物线绕其焦轴旋转而成的抛物反射面, 反射面一般采用导电性能良好的金属或在其它材料上敷以金属层制成; 其二:置于抛物面焦点处的馈源(也称照射器)。
馈源把高频导波能量转变成电磁波能量并投向抛物反射面, 而抛物反射面将馈源投射过来的球面波沿抛物面的轴向反射出去, 从而获得很强的方向性。
Parabolic Antennae 抛物面天线的参数选择2、The Cassegrain Antenna 11The Cassegrain Antenna Advantages The feed radiator is more easily supported and the antenna is geometrically compact. It provides minimum losses as the receiver can be mounted directly near the horn. Disadvantage: The subreflector of a Cassegrain type antenna are fixed by bars. These bars and the secondary reflector constitute an obstruction for the rays coming from the primary reflector in the most effective direction 3、Fan-Beam Antenna 3.4 抛物面的馈源理想的抛物面馈源是一个点源,它的方向图应能得到所需的口径分布。
在抛物面中,要求由馈源发出的辐射,其相位不随角度而变。
馈源的辐射方向图称作初级方向图;当用此馈源照射时,口径的辐射方向图称作次级方向图。
最佳馈源照射角度为了在口径上获得比较均匀的照射,天线的焦距—直径比必须较大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
6、比较计算:两电位器按电桥连接,完成减法运算*U U e -=(偏差)。
7、控制器:放大器,比例控制。
8、执行器:直流电动机及减速箱。
工作原理分三种情况考虑:1当两个电位器1RP 和2RP 的转轴位置一样时,给定角*m θ与反馈角m θ相等,所以角差*m m m 0θθθ∆=-=,电位器输出电压*U U =,电压放大器的输出电压ct U 0=,可逆功率放大器的输出电压d U 0=,电动机的转速n 0=,系统处于静止状态。
2当转动手轮,使给定角*m θ增大,m 0θ∆>,则*U >U ,ct U 0>,d U 0>,电动机转速n >0,经减速器带动雷达天线转动,雷达天线通过机械机构带动电位器2RP 的转轴,使m θ也增大。
3给定角*m θ减小, *m m θθ<,电动机就带动雷达天线超着缩小偏差的方向运动,只有当*m m θθ=,偏差角m 0θ∆=,ct U 0=,d U 0=,系统才会停止运动而处在新的稳定状态。
2 雷达天线伺服控制系统框图由实物图可画出系统方框图,如下图3-1 雷达天线伺服控制系统原理框图给定角*m θ经电位器变成给定信号*U ,被控量经电位器变成反馈信号U ,给定信号与反馈信号产生偏差信号e ;偏差信号经放大器(电压比较放大器和可逆功率放大器)得到d U ,d U 通过执行机构(直流伺服电动机)作用到雷达天线上,减小偏差,最终实现*mm θθ=。
这就是控制的整个过程。
各部分传函及方块图位置检测器在控制系统中,单个电位器用作为信号变换装置,一对电位器可以组成误差检测器,空载时,单个电位器的电刷角位移()t θ与输出电压()u t 的关系曲线在进行理论分析时可以用直线近似,于是可得输出电压为0()()u t K t θ= 式中0max K E θ=,是电刷单位角位移对应的输出电压,称为电位器传递系数,其中E 是电位器电源电压,max θ是电位器最大工作角。
对上式求拉氏变换,可求得电位器传递函数为0()()()U s G s K s θ== 可以看出电位器的传递函数是一个常值,它取决于电源电压E 和电位器最大工作角度max θ。
电位器可用图2-1的方框图表示。
图2-1 电位器方框图其中输入()X s 就是()s θ,输出()C s 就是()U s ,()G s 就是0K 。
用一对相同的电位器组成误差检测器时,其输出电压为120120()()()[()()]()u t u t u t K t t K t θθθ=-=-=∆式中0K 是单个电位器的传递系数;12()()()t t t θθθ∆=-是两个电位器电刷角位移之差。
称为误差角。
因此,误差角为输入时,误差检测器的传递函数与单个电位器传递函数相同,即为0()()()U s G s K s θ==∆ .2 电压比较放大器电压比较放大器实际上是比较元件和一部分放大元件的组合,其职能是把测量元件检测到的被控量实际值与给定元件给出的参据量进行比较,求出它们之间的偏差,并经过电压型集成运算放大器的放大作用,将偏差信号放大。
具体说来就是:*ct ct ()U K U U =- 其中ct 10K R R =-,又因*U U e -=(偏差),所以上式可以写成ct ct U K e =,对该式两边同时进行拉氏变换,可得电压比较运算放大器的传递函数为ct ct ()()()U s G s K E s == 从式子可以知道电压比较放大器的传递函数也是一个常值。
电压比较放大器可以用图2-2所示的方框图表示图2-2 电压比较器方框图其中ct ()G s K =。
可逆功率放大器本设计用到的功率放大器由晶闸管或大功率晶体管组成功放电路,由它输出一个足以驱动电动机SM 的电压和电流。
分析可知,对该环节做近似处理,可得d d ct U K U =对式子两边同时做拉氏变换,得可逆功率放大器的传递函数为d d ct ()()()U s G s K U s == 用图2-3所示的方框图表示。
图2-3 可逆功率放大器方框图其中d ()G s K =。
执行机构直流伺服电动机在控制系统中广泛用作执行机构,用来对被控对象的机械运动实现快速控制,通过简化处理后的直流伺服电动机的微分方程为mm m1d2()()()()d tT t K u t K M tdtωω+=-式中()M t可视为负载扰动转矩。
根据线性系统的叠加原理,可分别求d()u t到m()tω和()M t到m()tω的传递函数,以便研究在d()u t和()M t分别作用下电动机转速m()tω的性能,将他们叠加后,便是电动机转速的响应特性。
所以在不考虑负载扰动转矩的条件下,即()0M t=时和在零初始条件下,即'm m(0)(0)0ωω==时,对上式各项求拉氏变换,并令m m()[()]s L tωΩ=,d d()[()]U s L u t=,则得s的代数方程为m m1d(1)()()T s s K U s+Ω=由传递函数的定义,于是有m1d m()()()1s KG sU s T sΩ==+()G s便是电枢电压d()u t到m()tω的传递函数,mT是系统的机电常数。
这可以用图2-4所示的方框图来表示图2-4 直流伺服电动机方框图其中1m()1KG sT s=+。
减速器设减速器的速比为i,减速器的输入转速为n,而输出转速为'n,则减速器的传递函数为'()()()gN sG s KN s==其中g1/K i=。
系统的原理结构图在不考虑干扰力矩的条件下,并适当的变换,就会得到雷达天线伺服控制控制系统的结构图,如图3-2所示图3-2 雷达天线伺服控制系统结构图其中()R s就是*m()sθ,()C s就是m()sθ,g1/K i=。
将方框图进行化简处理,可得系统的开环传递函数m*m m()()()()()(1)sC s KG sR s s s T sθθ===+其中0ct d1gK K K K K K=。
简化后的系统方框图如图3-3所示图3-3 系统简化方框图从实际考虑,我们知道雷达天线伺服控制系统的性能应该是响应速度尽可能快,即调节时间尽可能小,超调量尽可能小。
3.系统传递函数本系统的设计要求是系统通过校正设计后的单位阶跃响应无超调,且调节时间s0.5t s≤。
因系统的开环传递函数为m()(1)KG ss T s=+其中K为开环增益,mT为直流伺服电动机的时间常数。
选取m0.1T s=的直流伺服电动机作为执行机构。
由开环传递函数求得系统的闭环传递函数2/()()11()mm mK TG ssKG s s sT TΦ==+++由上式可以得到闭环特征方程为21m mKs sT T++=这是一个二阶系统,在没有校正设计前,取系统的阻尼比为0.5ζ=,代入m0.1T=,由二阶系统的标准形式有1210nmTζω==210nmKKTω==计算得到10rad/snω=。
系统的开环增益为210(rad/s)K=系统的开环传递函数为m10()(1)(0.11)KG ss T s s s==++这可以用系统的参数方框图表示,如图3-4所示图3-4 系统参数方框图4系统性能分析系统稳态性能分析可以看出1ν=,是一型系统。
静态位置误差系数lim()()psK G s H s→==∞得到系统在阶跃输入作用下的稳态误差111lim()()1sspseG s H s K→===++系统动态性能分析对本系统而言,在没有校正设计时,0.5ζ=,可知系统是欠阻尼二阶系统。
动态分析具体而言就是确定系统的动态性能指标。
因cos ζβ=,于是求得阻尼角为 arccos arccos0.5/3βζπ===而阻尼振荡频率为218.66(rad/s)d n ωωζ=-=对欠阻尼二阶系统各性能指标进行近似计算,可得1、延迟时间d t :10.710.70.50.13510d nt ζω++⨯=== 2、上升时间r t :/30.24()8.66r d t s πβππω--=== 3、调节时间s t :3.5 3.50.7()0.510s nt s ζω===⨯ 4、超调量%σ:2/1%100%16.3%e πζζσ--=⨯=由这些计算出的动态性能指标可以知道,系统并没有达到设计要求,超调量%16.3%0σ=>,调节时间0.70.5s t =>。
系统此时的单位阶跃响应曲线如图4-1所示图4-1 系统校正前单位阶跃响应曲线从对系统的动态分析和图4-1可以看出,如果该系统没有校正设计,则达不到设计要求,所以为了满足设计要求,必须进行校正设计。
5 校正设计所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性能指标。