理论力学_点的运动学
理论力学—点的运动学

O
二.点的速度
⒈ 平均速度
⒉ t 时刻的速度 r dr v lim r t 0 t dt
1.1 矢量法
三.加速度
速度矢端 曲线---速度端图
v ⒈ 平均加速度 a t
*
a
⒉ t 时刻的加速度
v dv d r a lim r 2 t 0 t dt dt
v y r sin t
2 2
v v
2
x
v
2
y
cos( v, i )
vx t MB sin sin v 2 2 MD v t BD cos( v, j ) y cos cos v 2 2 MD
t r (1 cos t ) sin t 2r sin 2
大小
a a x a
2Leabharlann 2ya2
z
方向
d x d y d z dt 2 dt 2 dt 2
2 2 2
2
2
2
ay ax az cos(ai ) , cos(aj ) , cos(ak ) a a a
解:由点M的运动方程,得
8 cos 4t , ax 32 sin 4t vx x x
8 sin 4t , a y 32 cos 4t vy y y 0 vz j 4, a z
z
2 2 2 2 从而 v vx vy vz2 80m s , a ax ay az2 32m s 2
α
at v M
故在这瞬时飞机的总加速度 a 的大小和方向为
理论力学教案-运动学
论力学--运动学运动学研究点和刚体运动的几何规律,即运动方程、轨迹、速度、加速度或角速度、角加速度等运动特征量。
第六章 点的运动学点的运动学是研究一般物体运动的基础,又具体独立的应用意义。
描述点的运动有矢径法、直角坐标法、自然法三种方法。
§6.1 矢量法一.矢量法表示点的运动方程设动点M 在空间作曲线运动,在参考坐标系上任取 某确定的点O 为坐标原点,则动点的位置可用原点至动 点的矢径r 表示。
当动点M 运动时,矢径r 的大小和方 向一般也随时间而改变,并且是时间的单值连续函数, 即)(t r r =上式称为用矢量表示的点的运动方程。
动点M 在运动过程中,其矢径r 的末端在空间 描绘出的曲线,称为动点M 的运动轨迹。
也称为矢径r 的矢端曲线。
二.矢量法表示点的速度)()(t t t r r r -+=∆∆平均速度tt t t t ∆∆∆∆)()(r r r υ-+== 瞬时速度dtd t t t rr υυ===→→∆∆∆∆00limlim 三.矢量法表示点的加速度 )()(t t t υυυ-+=∆∆ 平均加速度tt t t t ∆∆∆∆)()(υυυa -+==瞬时加速度2200lim lim dt d dt d t t t rυυa a ====→→∆∆∆∆结论:动点的速度等于它的矢径r 对时间的一阶导数,其加速度等于动点的速度对时间的一阶导数,也等于动点的矢径r 对时间的二阶导数。
§6.2 直角坐标法一.直角坐标表示动点的运动方程由于k j i r z y x ++=,当动点在轨迹上运动时,r 随时间而变化,则动点M 的坐标值x ,y 和z 随时间 而变化。
即⎪⎩⎪⎨⎧===)()()(321t f z t f y t f x消去方程中的参数t ,则得到动点运动的轨迹。
二.直角坐标表示动点的运动速度由于动点M 的矢径可表示为 k j i r z y x ++=,所以动点M 的速度可表示为 k j i r υdtdzdt dy dt dx dt d ++==将动点M 的速度写成投影形式,即k j i υz y x υυυ++=比较以上两式,可得dt dx x =υ,dt dy y =υ,dtdz z =υ 三.直角坐标表示动点运动的加速度动点M 的速度可表示为k j i r υdtdz dt dy dt dx dt d ++==,其加速度可表示为 k j i υa 222222dtzd dt y d dt x d dt d ++==将动点M 的加速度写成投影形式,即k j i a z y x a a a ++=比较以上两式,可得 22dt x d a x =,22dt y d a y =,22dt z d a z =结论:动点的速度在各坐标轴上的投影等于各对应的坐标对时间的一阶导数,动点的加速度在各坐标轴上的投影等于各对应的坐标对时间的二阶导数。
理论力学——运动学

v2
n
加速度a的大小:
a
aτ + a n
2
2
dv 2 v 2 2 ( ) ( ) dt
加速度和主法线所夹的锐角的正切:
tan
aτ an
4、直角坐标于自然坐标之间的关系:
ds 2 dx 2 dy 2 dz 2 v ( ) ( ) ( ) ( ) dt dt dt dt
2
2
九、刚体的基本运动
1、刚体的平动
(1)刚体平动的定义 刚体运动时,若其上任一直线始终保持与它的初始
位置平行,则称刚体作平行移动,简称为平动或移动 。 (2) 平动刚体的运动特点
刚体平动时,其上各点的轨迹形状相同;同一瞬时,
各点的速度相同,加速度也相同。
刚体平动判别:P169题三图,P176题五图,题七图
点加的速度
i + y j + z k vx
a vx i + v y j + vz k xi + yj + zk
ax v x x ay v y y az v z z
3、自然法
用自然法描述的运动方程:
s பைடு நூலகம் f (t )
a 2 a x a y a z a an
1
2
2
2
2
2
a 2 a v2
2
5、匀速、匀变速公式
(1)
aτ=常数,
v v0 aτ t
( 2)v=常数,
1 2 s s0 v0t aτ t 2 2 v 2 v0 2a ( s s0 )
平面运动。
理论力学--运动学总结

速度瞬心位置的确定总结
瞬时平动
几点注意 1、基点法是速度分析的基本方法;
2、速度投影法 应用起来简单,但必须知道待求速度 点的方位,致命的弱点—是不能求图形的角速度 2、当平面几何简单时,分析速度可采用瞬心法; 瞬心法既可以求某点的速度,也可以求刚体运动 的角速度; 4、确定速度瞬心的速度是该点的绝对运动速度; 5、具体分析时三种方法灵活运用;
(1)刚体的基本运动 平动
v A vB
aA aB
各点的轨迹相同;
可简化为一个点的运动。
定轴转动
v R
a R
an R 2
轮系的传动比:
1 n1 R1 Z 2 i12 2 n2 R2 Z1
各处不打滑时: 接触点有相同的线速度和相同的切向加速度。
(2)刚体的平面运动 1. 定义 任一点到某固定平面的距离保持不变。
B点的加速度分析
D
C
a a 2 a a 2 ae 2 ar 2
n
aa 2 ae 2
O1
30°
ar 2
B
aa 2cos60 aa2cos30 ae 2
n
aa 2
1
30° O2
n
A
a a2 O2 B 2
n 2 aa2 O2 B2
ae2 657mm/ s
2
三、刚体的运动
va=v
vCA
动点:滑块C 动系:固结于AE
u=vA
vr
vC' A
ωAE
分析三种运动
牵连运动:刚体的平面运动
牵连转动
va ( vA vCA ) vr
va cos vCA v A sin
理论力学(5.6)--点的运动学-思考题
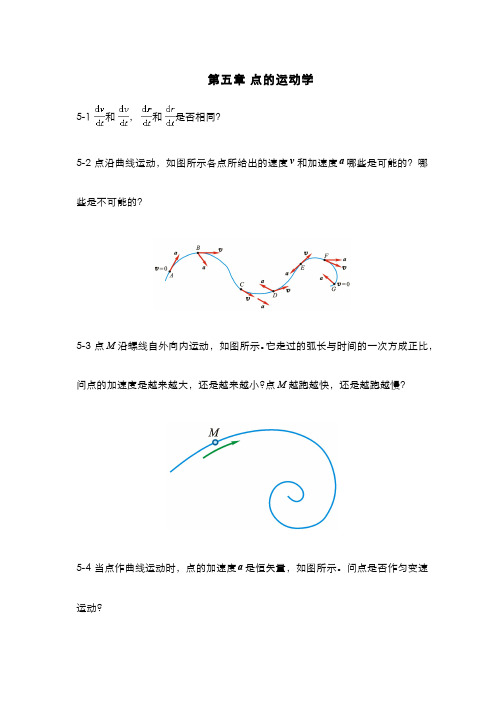
第五章 点的运动学5-1和 , 和 是否相同?5-2点沿曲线运动,如图所示各点所给出的速度v和加速度a哪些是可能的?哪些是不可能的?5-3点M 沿螺线自外向内运动,如图所示。
它走过的弧长与时间的一次方成正比,问点的加速度是越来越大,还是越来越小?点M越跑越快,还是越跑越慢?5-4当点作曲线运动时,点的加速度a是恒矢量,如图所示。
问点是否作匀变速运动?5-5 作曲线运动的两个动点,初速度相同、运动轨迹相同、运动中两点的法向加速度也相同。
判断下述说法是否正确:(1)任一瞬时两动点的切向加速度必相同;(2)任一瞬时两动点的速度必相同;(3)两动点的运动方程必相同。
5-6 动点在平面内运动,已知其运动轨迹)(x f y 及其速度在x 轴方向的分量。
判断下述说法是否正确:(1)动点的速度可完全确定;(2)动点的加速度在x 轴方向的分量可完全确定;(3)当速度在x 轴方向的分量不为零时,一定能确定动点的速度、切向加速度、法向加速度及全加速度。
5-7 下述各种情况,动点的全加速度,切向加速度和法向加速度三个矢量之间有何关系?(1)点沿曲线作匀速运动;(2)点沿曲线运动,在该瞬时其速度为零;(3)点沿直线作变速运动;(4)点沿曲线作变速运动。
5-8 点作曲线运动时,下述说法是否正确:(1)若切向加速度为正,则点作加速运动;(2)若切向加速度与速度的符号相同,则点作加速运动;(3)若切向加速度为零,则速度为常矢量。
5-9 在极坐标系中,ρρ =v ,ρϕϕ =v 分别代表在极径方向与极径垂直方向(极角ϕ的方向)的速度。
但为什么沿这两个方向的加速度为2ϕρρρ -=a ϕρϕρϕ 2+=a 试分析ρa 中2ϕρρ -=a 和ϕa 中的ϕρ 出现的原因和它们的几何意义。
理论力学重难点及相应题解
运动学部分:一、点的运动学重点难点分析1.重点:点的运动的基本概念(速度与加速度,切向加速度和法向加速度的物理意义等);选择坐标系,建立运动方程,求速度、加速度。
求点的运动轨迹。
2.难点:运动方程的建立。
解题指导:1.第一类问题(求导):建立运动方程然后求导。
若已知点的运动轨迹,且方程易于写出时,一般用自然法,否则用直角坐标法。
根据点的运动性质选取相应的坐标系,对于自然法要确定坐标原点和正向。
不管用哪种方法,注意将点置于一般位置,而不能置于特殊位置。
根据运动条件和几何关系把点的坐标表示为与时间有关的几何参数的函数,即可得点的运动方程。
2.第二类问题(积分):由加速度和初始条件求运动方程,即积分并确定积分常数。
二、刚体的简单运动重点难点分析:1.重点:刚体平移、定轴转动基本概念;刚体运动方程,刚体上任一点的速度和加速度。
2.难点:曲线平移。
解题指导:首先正确判断刚体运动的性质。
其后的分析与点的运动分析一样分两类问题进行。
建立刚体运动方程时,应将刚体置于一般位置。
三、点的合成运动(重要)重点难点分析:1.重点:动点和动系的选择;三种运动的分析。
速度合成与加速度合成定理的运用。
2.难点:动点和动系的选择。
解题指导:1.动点的选择、动系的确定和三种运动的分析常常是同时进行的,不可能按顺序完全分开。
2.常见的运动学问题中动点和动系的选择大致可分以下五类:(1)两个(或多个)不坟大小的物体独立运动,(如飞机、海上的船舶等)对该类问题,可根据情况任选一个物体为动点,而将动系建立在另一个物体上。
由于不考虑物体的大小,因此动系(刚体)与物体(点)只在一个点上连接,可视为铰接,建立的是平移动坐标系。
(2)一个小物体(点)相对一个大物体(刚体)运动,此时选小物体为动点,动系建立在大物体上。
(3)两个物体通过接触而产生运动关系。
其中一个物体的接触只发生在一个点上,而另一个物体的接触只发生在一条线上。
选动点为前一物体的接触点,动系则建立在后一物体上。
理论力学 第一章 点的运动学
已知速度的投影求速度
大小
v v v v
2 x 2 y
2 z
方向由方向余弦确定
cosv , i v x v cosv , j v y v cosv , k v z v
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
§ 1.1点的运动矢量分析方法
加
速
度
t 瞬时: 速度 v(t) t+ t 瞬时:速度 v(t + t ) 或v
t 时间间隔内速度的改变量
v ( t ) = v ( t + t ) - v( t )
点在 t 瞬时的加速度
§ 1.2 点的运动的直角坐标法
加速度
a ax i a y j az k
dv x d 2 x ax 2 dt dt dv y d 2 y ay 2 dt dt dv z d 2 z az 2 dt dt
dv y dv x dv z d2 y d2x d2z a i j k 2 i 2 j 2 k dt dt dt dt dt dt
方 cosa, i a x a, 向 cosa, j a y a, 余 弦 cosa, k a z a
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
§1.3 点的运动的自然坐标法
在点的运动轨迹已知的情况下,可建立弧
坐标和自然轴系来描述该点的运动,这种方
点的切线所组成的 平面,称为P点的密 切面。
P P
lim a1 a
理论力学 运动学复习
60°
O
θ
B
C
a
ve = va sin30° ve ∴va = = 2 m/s sin30° ∴v A = 2 m/s
vr
A
30°
⑵加速度分析图: 加速度分析图: t y aa ae
60° 30°
n aa
a
n aa
t a
A B
v C
x
O
θ
a
ar
n t − aa cos 30° − aa cos 60° = − ae
m/s和加速度a =20 m/s2。方向均向左。求此时滑块A 方向均向左。 此时滑块 t 的速度和加速度。 的速度和加速度。 aa 解:动点——滑块A n A 动系固结于BC aa v 绝对运动: 绝对运动: 圆周运动 牵连运动: 牵连运动: 平动 相对运动: 相对运动: 直线运动 速度分析图: ⑴速度分析图: va ve
ω
A O D B 30°
v B =v D =v A v A = OA⋅ω = r ⋅ω
vA vD
C
∴v B = r ⋅ω v D cos 60 ° = v C cos 30 °
v D cos 60° 3 vC = rω = cos 30° 3
3 ω ∴ω C = 3
23
vC
vB
aB =aA +a +a
15
曲柄OA= r,以匀角速度ωO转动,BC=DE, 转动, , , [例7-9] 曲柄 例 。求图示位置时, 的角速度和 (P181) BD=CE=l。求图示位置时,杆BD的角速度和 ) 角加速度。
D 60° ° B
60° vr 60 ° ° 60
α ω
E vr C
理论力学第5章(点的运动)
(2) 运动学: 研究点与刚体运动的几何性质。
包括位移、轨迹、速度、加速度。 (与力无关、也是变形体运动基础)
A B
F
C
B
刚体运动
C
变形(包含刚体位移和相对位移)
(3) 动力学: 研究物体所受力与运动间的关系。
包括质点系、刚体,变形体的动力效应。
第五章 点的运动学
§5-1 运动学的基本概念
速度
已知: OC AC BC l , MC a , t。 求:运动方程、轨迹、速度和加速度。
x l a cost ax v x 2 a y vy y l a sin t
2
加速度
a a a
F ( x, y) 0
二、点的速度v
又
r = xi + yj + zk
式中 v x 所以得
dr dx dy dz v i j k dt dt dt dt v = vx i + vy j + vz k
、v y
、v z
vx
dx dt
v
表明:“动点的速度在坐标轴上的投影,等于动点对应的位置 坐标对时间 t 的一阶导数”。 则速度的大小和方向余弦为
弧坐标的运动方程sf切向加速度表示速度大小的变化三点的加速度法向加速度表示速度方向的变化匀速运动v常数常数常数匀变速直线运动匀速圆周运动匀速直线运动或静止直线运动匀速运动圆周运动匀速运动直线运动匀速曲线运动匀变速曲线运动点作曲线运动画出下列情况下点的加速度方向
(1) 静力学: 研究物体所受力系的简化、平衡规律及其应用。
△r称为在△t时间内动点M的位移。
间间隔△t内的平均速度。以 v*表示。则: Δr v Δt 平均速度表示动点在△t内平均运动的快慢和运动方向。
理论力学第六章点的运动学.
又 d 1 n dS
an
v2
n an
v2
an是一个沿主法线正方向 的矢量,指向曲率中心 。
法向加速度反映点的速度方向改变的快慢程度。
dv v2 a a a n a a n n n dt
— 与 弧 坐 标 的 正 向 一 致 n — 指 向 曲 线 内 凹 一 侧 b — 与 , n 构 成 右 手 系
b n
[注]:自然坐标系是沿曲 13 线而变动的游动坐标系。
6-3 自然法 3、曲率 (1 / ) :
定义——曲线切线的转角对弧长 一阶导数的绝对值。表示曲线的 弯曲程度。
一.运动方程、轨迹
矢径是点的单值连续函数,
r xi yj zk
故x,y,z也是时间的单值函数:
x f1 (t ), y f 2 ( t ), z f 3 ( t )
——以直角坐标表示的点的运动方程 上式消去t,即为点的轨迹方程:f ( x , y , z ) 0
6
6-2 直角坐标法
当点M运动时,矢径r随时间而 变化,并且是时间的单值函数:
r r t
—以矢量表示的 点的运动方程
矢端曲线:动点M在运动过程中,矢 径r的末端绘出的一条连续曲线。 ——动点M的运动轨迹
二.点的速度
dr v r dt
方向:沿着矢径r的矢端曲线的切线 方向,且与此点的运动方向一致。
大小:速度矢的模,表明点运动的快慢。
t dv k dt v0 v 0 v ln kt , v v0 e kt v0 v
dx 3、 由 v v0e kt dt
理论力学第五章——点的运动

'
当Δt 0, Δv/Δt的极限称为点在瞬时t的加速度:
v dv d 2 x a lim 2 x t 0 t dt dt
5.1 点的直线运动
已知加速度或速度方程, 采用积分法 求运动方程 ,积 分常数由运动初始条件决定。 dv a dv adt dt v t dv adt
由于
dτ dτ ds dτ ds v n dt dt ds ds dt
所以
dv v a τ n dt
2
5.4 自然法
4 点的切向加速度和法向加速度
dv v a τ n dt
上式表明加速度矢量a是由两个分矢量组成:分矢量at 的方向永远沿轨迹的切线方向,称为切向加速度,它 表明速度代数值随时间的变化率;分矢量 an的方向永 远沿主法线的方向,称为法向加速度,它表明速度方 向随时间的变化率。
2 t 2
2
at tan | | 0.25 an
2
5.4 自然法
全加速度为aτ和an的矢量和
a at an
全加速度的大小和方向由下列二式决Leabharlann : 大小:a at an
2
2
方向:
at an cos(a ,t ) , cos(a ,n ) a a
5.4 自然法
如果动点的切向加速度的代数值保持不变,则动 点的运动称为匀变速曲线运动。现在来求它的运动规 律。 at c
dτ τ j 1 lim lim n n ds s 0 s s 0 s
t"
5.4 自然法
3 点的速度
r s ds v lim lim t 0 t t 0 t dt
理论力学-点的运动学

7
三. 点的加速度
a dv dvx i dvy j dvz k dt dt dt dt
d2 x i
dt2
d2 y dt2
j
d2 z k
dt2
axi
ay
j
azk
a ax2 ay2 az2
cos(a, i
)
ax
,
a
[注] 这里的 x、y、z 都是时间单位连续函数。
x f1(t)
11
加速度的大小为
a
a
2 x
a
2 y
2
(l a)2 cos2 t (l a)2 sin2 t
2 l2 a2 2al cos 2t
加速度的方向余弦为
cos(a,i) ax a
cos(a,j) ay a
(l a)cost l2 a2 2al cos 2t
(l a)sint l2 a2 2al cos 2t
dt dt
dt
dt dt2
dt
① 切向加速度 a
——表示速度大小的变化
a
dv τ dt
d2 dt
s
2
τ
② 法向加速度 an ——表示速度方向的变化
an
vdτ dt
v lim Δ τ Δt0 Δ t
v lim (Δ τ Δt0 Δ s
Δ s) Δt
v2 lim Δ τ Δt0 Δ s
(lim Δ s d s v) Δt0 Δ t d t
1
即an
v2 n,
a a2 an2 ,
a
a arctg
2
an |a | an
dv dt
τ
v2
n
16
理论力学_运动学部分

三)自然法 1. 运动方程
s f (t )
2. 点的速度
ds v v dt
3. 点的切向加速度和法向加速度
dv v a τ n dt
2
at τ an n
dv at 切向加速度 dt v2 an 法 向 加 速 度 ρ
an沿主法线,指向曲率中心。
一)刚体的平移
O
C
A M D B
例4:长为l 的OA杆,A端恒与倾角为30°的斜面接触, 并沿斜面滑动,斜面以速度v 向右作匀速直线运动, 方向如图。在图示位置,OA杆水平,试求此时OA杆的 角速度和角加速度。
v
A
30
O
例5:图示平面机构中,主动件OA杆的角速度为 ωO=10rad/s,角加速度为αO=5rad/s2,OA=0.2m, O1B=l m,AB=1.2 m。图示瞬时(cosθ=0.983, sinθ=0.167),杆OA与杆O1B均处于铅直位置,求此 时杆AB的角速度、点B的速度以及点B的切向和法向 加速度。
A
ω
O
O1
B
2R
R
练习3:曲线滑槽 C 处的曲率半径在水平线上,AB
=BC=CD=l,滑块D以匀速v 运动,推动滑块C 运动。
当C与 C 点重合时,AB 杆的角速度为 AB 速度 AB 0 ,且A、B、C三点处于一条水平线上,求 此时BC杆的角速度及CD杆的角加速度。
v
C
x f1 (t ) y f 2 (t ) z f 3 (t )
2. 速度
dx vx dt
也是点运动轨迹的参数方程
dy vy dt
dz vz dt
3. 加速度
理论力学 第七章 点的运动学
2
2 当t 0时,S 0,sin 2 2
2sin
| | 1于是 2
2sin sin d 1 2 2 lபைடு நூலகம்m | | lim lim ( ) S S dS t 0 S t 0 t 0
§7–5 自然坐标轴系
§7–6 速度与加速的自然坐标表示法
§7.1 运动学的基本概念
一. 运动学:运动学是从几何的角度研究物体运动的科学。 (即只研究物体运动的几何性质,不涉及改变运动的原因) 二.参考系:参考系就是固定在参考体上的坐标系。
如:静参考系(定系)就是固定在地球上或相对地球静止的物
体上的坐标系。
r 得 cos 1 ( ) 2 sin 2 l
r 2 2 于是B的运动方程为 x r cos l 1 ( ) sin l
r 2 于是B的运动方程为 x r cos l 1 ( ) sin 2 l
为使计算方便,令
r 2 2 1 r 2 2 cos 1 ( ) sin 1 ( ) sin l 2 l 1 r 2 1 r 2 1 ( ) ( ) cos 2 4 l 4 l
x = x(t) 点的运动方程为: y = y(t) z = z(t)
轨迹为F(x,y)=0
P
k j iO
r
a
y
x
三 矢径法 选取空间选一点O为原点,动 点的位置由矢径r表示 z
矢端曲线
P
P´ P
y
r r (t )
r r´ r
O
为点的矢径运动方程,且有
r xi y j z k
弧O1M R 2t
理论力学第8章-1
rO
x
i
O
y 动点在定系中的矢径:
rM ro r
牵连点在定系中的矢径:
y
rM rM ro r
动点的相对速度:
x
动点的牵连速度:
drM d ( ro r ) ro xi yj zk ve dt dt
四、三种速度和三种加速度 1、绝对速度 va和绝对加速度 aa
动点在绝对运动中的速度和加速度。
2、相对速度 v 和相对加速度 ar 动点在相对运动中的速度和加速度。 3、牵连速度 ve 和牵连加速度 ae 牵连点(动坐标系中与动点相重合的点,不是动点)的速度
r
和加速度。
五.三种运动的轨迹 绝对轨迹:动点在静系中运动的轨迹。 相对轨迹:动点在动系中运动的轨迹。 牵连点轨迹:牵连点在静系中的轨迹。
动点:A1(在O'A1 摆杆上) 动系:圆盘 定系:机架 绝对运动:曲线(圆弧) 相对运动:曲线 牵连运动:定轴转动
影片:810
动 点: A(在AB杆上) [注] 应说明动点在哪个 动 系:偏心轮 定 系:地面 物体上。 绝对运动:直线 相对运动:圆周(曲线) (A点始终在偏心轮的圆弧上 运动) 牵连运动:定轴转动
x´
[例8-4] 曲柄摆杆机构 已知:OA=r , , OO1=l,图示瞬时OA⊥OO1 求:摆杆O1B角速度 1 解:取套筒A点为动点,摆杆O1B为动系, 基座为定系。
y´
绝对速度va = r 相对速度vr = ? 牵连速度ve = ?
方向⊥ OA 方向//O1B 方向⊥O1B
由速度合成定理 va vr ve 作出速度平行四边形 如图示。
牵连运动:
平动
理论力学-点的运动学

速度和加速度的矢量表示
04
CHAPTER
点的运动轨迹和运动参数
通过已知的初始位置和速度矢量,利用矢量合成法则确定点的运动轨迹。
直角坐标系
极坐标系
参数方程
利用极坐标表示点的位置,通过已知的初始位置和速度矢量,确定点的运动轨迹。
通过设定参数表示点的位置,根据初始条件和运动规律,确定参数方程,从而确定点的运动轨迹。
加速度与轨迹的关系
根据点的加速度矢量,可以判断点加速或减速的情况,进一步推断出其运动轨迹的变化趋势。
位移与轨迹的关系
根据点的位移矢量,可以确定点在平面或空间中的运动轨迹。
运动参数与轨迹的关系
05
CHAPTER
点的运动学应用
刚体的平动是指刚体在空间中的移动,其上任意两点之间的距离保持不变。
总结词
刚体的平动是刚体运动的一种基本形式,它描述了刚体在空间中的移动。在这种运动中,刚体的所有点都以相同的速度和方向移动,因此刚体上任意两点之间的距离保持不变。平动不会改变刚体的形状和大小。
点的速度和加速度
总结词
速度是描述物体运动快慢的物理量,其大小等于物体在单位时间内通过的位移。
详细描述
速度的大小可以用矢量表示,其大小等于物体在单位时间内通过的位移量,方向与物体运动方向相同。在直角坐标系中,速度矢量可以表示为位置矢量对时间的一阶导数。
速度的定义与计算
总结词
加速度是描述物体速度变化快慢的物理量,其大小等于物体在单位时间内速度的变化量。
详细描述
加速度的大小可以用矢量表示,其大小等于物体在单位时间内速度的变化量,方向与物体速度变化方向相同。在直角坐标系中,加速度矢量可以表示为速度矢量对时间的一阶导数。
理论力学知识点总结
理论力学知识点总结关键信息项:1、静力学受力分析力系简化平衡方程2、运动学点的运动学刚体的平动与转动点的合成运动3、动力学牛顿定律动量定理动量矩定理动能定理11 静力学111 受力分析受力分析是理论力学的基础,它的主要任务是确定研究对象所受的外力。
通过对物体的约束和接触情况进行分析,画出受力图。
常见的约束类型包括柔索约束、光滑面约束、铰链约束等。
112 力系简化力系简化的目的是将复杂的力系用一个简单的力系等效替代。
通过力的平移定理,可以将力系向一点简化,得到主矢和主矩。
113 平衡方程对于平衡的物体或系统,其合力和合力矩都为零。
根据不同的约束条件,可以列出相应的平衡方程,如平面力系的平衡方程、空间力系的平衡方程。
12 运动学121 点的运动学描述点在空间中的位置随时间的变化规律。
可以用直角坐标法、自然法和弧坐标法来表示点的运动方程。
122 刚体的平动与转动刚体的平动是指刚体上各点的运动轨迹相同,速度和加速度也相同。
刚体的转动则是围绕某一固定轴的旋转运动,其角速度和角加速度描述了转动的快慢和变化。
123 点的合成运动研究一个点相对于不同参考系的运动之间的关系。
通过牵连运动、相对运动和绝对运动的分析,运用速度合成定理和加速度合成定理求解问题。
13 动力学131 牛顿定律牛顿第一定律指出物体具有保持原有运动状态的惯性;牛顿第二定律阐明了力与加速度的关系;牛顿第三定律说明了作用力与反作用力的大小相等、方向相反且作用在同一直线上。
132 动量定理物体的动量变化等于作用在物体上的冲量。
通过动量定理可以解决涉及力的时间累积效应的问题。
133 动量矩定理对于绕定轴转动的刚体,其动量矩的变化等于作用于刚体上的外力矩的冲量矩。
134 动能定理合外力对物体做功等于物体动能的变化。
动能定理常用于分析物体的能量变化和运动状态的改变。
14 达朗贝尔原理引入惯性力,将动力学问题转化为静力学问题来求解。
15 虚位移原理利用虚功的概念,通过分析系统在虚位移上的功来确定系统的平衡条件。
清华大学理论力学课件-李俊峰-1-点的运动学

A l
sin )i (b cos ) j v (a
abl
( sin i cos j ) v l r l (cos i sin j )
r
O
M
l
B
x
vr 0
M点的速度垂直于其矢径!
2017/10/29 9
第2节 直角坐标描述法
d r lτ vA v lτ lv n dt
q v v
A
lτ
y
vA
( qτ ln)v
v
rv
O
27
q
M
x
r n
vA
2017/10/29
第4节 极坐标描述法
点P沿着平面曲线运动,其在任意时刻的位 Nhomakorabea可以用极坐标表示为:
(t ), (t )
P
矢量端图
r (t )
O
运动方程 位 移 速 度
r r (t )
r r (t t ) r (t ) v lim r dr r t 0 t dt 2 v d v d r a lim 2 r t 0 t dt dt
4
加速度
2017/10/29
当M点与地面接触时,即 2kπ
v0
— M点在该瞬时速度为零! 为什么?
当M点位于最高点时,即 (2k 1)π
i v 2 R
2017/10/29 15
第2节 直角坐标描述法
任意边缘点速度讨论
2
(1 cos ) i ( R sin ) j v R
M
理论力学第6章-点的运动
t0 t S j
当t→0时,t 与t′的夹角趋近于直角,即t 趋近
于轨迹在点M的法线,指向曲率中心。若记法线法线的
单位矢量为n,规定它指向曲率中心,则有
密切面:
dt v n dt
副法线
b
M
t
T
切线
n
过点M作 MT 的平行线 MT1 ,
MT和MT1可以确定一个平面。当点 无限趋近点M时,则此平面趋近某
4
49sin2 wt cos2 wt
O
加速度在x轴,y轴上的投影
j
yC
xC
C x
B
ax
=
dvx dt
7Lw2
4
cos wt
w 2 xC
C点的加速度的大小
ay
=
dvy dt
Lw2
4
sin wt
w2 yC
a ax2 ay2 w2
加速度的方向余弦
cos(a, i) ax xC ar
xC2 yC2 w2r
例6-6 曲柄OA绕O轴逆时针方向转动。其转过j角与时间t
的关系为
j
t
4
,若OA=10cm,OO1 =10cm,O1B=24cm,试求
B点运动方程、速度和加速度。
解:建立弧坐标
运动方程 速度 加速度
S O1B 12j 3πt
v dS 3π 9.42 cm/s dt d2S
at dt2 0
v vxi vy j vzk
速度v在三个轴上的投影
vx
=
dx dt
x(t)
vy
=
dy dt
y(t)
vz
=
dz dt
z(t)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力学问题的研究步骤 实际问题 力学模型 数学模型
力学知识 力学知识 工程经验 力学知识
绪 论
7/21
绪 论
8/21
否
符合 实际
?
分析计算
是 结束
数学工具
力学学科
力学的应用领域
学科分类
一般力学/动力学与控制 (Dynamics and Control) 重点研究一般质点系和刚体系 固体力学(Solid Mechanics) 重点研究固体 流体力学(Fluid Mechanics) 重点研究流体
绪
绪
所需基础知识
数学:矢量(向量)运算、矩阵运算、微 积分、常微分方程 物理:有关力学的基本内容
论
13/21
论
需要一定量的习题训练
“听课容易、做题难”
14/21
绪 论
15/21
绪 论
16/21
教材及参考书
课程安排
教材:李俊峰、张雄主编,《理论力学》, 清华大学出版社,2010年第2版,2011年第2 次印刷; 参考书目: 高云峰、李俊峰,《理论力学辅导与习题 集》 清华大学出版社 2003; 集》,清华大学出版社, 贾书惠、李万琼,《理论力学》,高等教育 出版社,2002; 贾书惠、张怀瑾,《理论力学辅导》,清华 大学出版社,2003; 高云峰 等编,《力学小问题及全国大学生力 学竞赛试题》,清华大学出版社,2003.
运动学:研究运动的描述(为动力学服务) 动力学:研究运动的原因(力)与运动的关系 静力学:研究力与平衡(特殊的运动形式)的 关系,是动力学的特例 矢量力学(几何力学):以牛顿定律为基础 分析力学:以变分原理为基础
4/21
理论力学的研究方法
力学模型
模型化(抽象方法) 公理化方法
质点
牛顿定律 达朗贝尔-拉格朗日原理
点 的运动学
11/22
点 的运动学
置)
求导
速度、加速度
引入已知条件
求导时应注意复合函数求导、相乘函 数求导等情况 注意结果的验证与分析 题目往往有其应用背景,应加以留意
v
x
12/22
2
例1-2-2 第1章
l vP l aP
几何关系:
解 第1章
2ll 2 xx
课内64学时 实验课(4次,课外8学时,网上选课) 答疑安排
绪 论
17/21
Hale Waihona Puke 绪 论18/21办 公 室:每周四晚上7:00 – 9:00 网络学堂和教学网站上讨论、Email交流
作业(纸张)
课代表收好,周三课上交给助教老师 助教老师批改完毕后在课上返回
3
课程安排
课程安排
考核方法:
参考系与坐标系
矢量运算(附录A)
矢量导数
参考系与坐标系是两个不同的概念。 例:一个滑块在某个固定斜面上运动
z
设矢量 a 为时间 t 的函数:
a (t ) a(t )e (t )
a (t ) a (t )
e (t ) 1
运动学引言
5/9
运动学引言
W
幅值
单位矢量
a(t ) a(t ) e(t ) a(t )e(t ) a(t )e(t )
vp v sin 2 v 2
讨论
vP θ P
B l A
l 2 h2 x2
h
C
vh
第1章
第1章
点 的 运动学
13/22
点 的 运动学
v
vP
h C
vP P
B θ l A
x 2 l2 ll
aP
2 v 2 vP l 2 2 3 v cos 2v h 4h
P´
r ( t t ) r
运动轨迹
P
矢量端图
r (t )
第1章
点 的 运动学
3/22
位置矢量、矢径
O
运动方程 位 移 速 度 加速度
r r (t )
矢量描述独立于 坐标系
1.2 直角坐标描述法
r r (t t ) r (t )
与运动轨迹 v lim r d r r 相切 t 0 t dt 2 v d v d r a lim 2 r t 0 t dt dt
rOM l (cos i sin j ) v rOM 0
点 的 运动学
9/22
点 的 运动学
M点的速度垂直于其矢径
x 0, y 0
0 时,M点的加速度: 当a=b=l且
2 rOM a
四分之一圆 O
M点的加速度指向O点
M点的速度和加速度?
10/22
矢量的矢量三重积
运动学引言
7/9
运动学引言
e (t t )
a ( b c ) ( a c ) b (a b ) c
单位矢量与其导数一定垂直!
物理解释?
8/9
运动学学引言
9/9
2
第1章 点的运动学
1.1 矢量描述法
2013年9月6日
2013年9月6日
矢量描述法 第1章
r (t ) OP
绪 论
11/21
绪 论
12/21
2
课程要求和学习方法
基本教学要求 准时上课,注意纪律(特别是冬天) 课上独立积极思考 课后独立完成作业 欢迎课上提问 欢迎课后讨论、反馈 欢迎课后讨论 反馈
学习目标
准确理解基本概念; 熟练掌握基本定理和公式灵活应用; 整体分析能力、综合运用知识能力、专业 素养;
理论力学 绪 论
绪 论
2013年9月13日
2/21
什么是力学?
理论力学课程内容
理论力学(狭义):研究质点、一般质点系、 刚体、刚体系的运动,研究其受力与运动之 间的关系。
力学(Mechanics) 研究物质机械运动规律的科学
——《自然科学学科发展战略调研报告》
绪 论
3/21
绪 论
物体的空间位形随时间的变化, 包括静止 包括静止、移动、转动、振动、 转 振 变形、流动、波动、扩散等。 (当代)力学研究介质运动、变形、流动的 宏微观行为,揭示力学过程及其与物理、化 学、生物学等过程的相互作用规律。
x
vp v sin
v
ap ? a sin
x
14/22
例1-2-3
半径为R的轮子沿直线轨道纯滚动(无滑动 地滚动)。设轮子保持在同一竖直平面内运 动,且轮心的速度为已知值u,试分析轮子 边缘一点M的运动。
例1-2-3 第1章
解
点 的 运动学
15/22
点 的 运动学
O M
R
M
16/22
i
M b B
r(t ) x(t )i y(t ) j z(t )k x x(t ) y y(t ) z z(t ) 分运动 i y j z k v (t ) x v x v y v z v, 方向余弦 a (t ) xi yj zk a x a y a z a, 方向余弦
参考系和坐标系
参考物:运动情况认为已知的物体。在运动 学中,参考物的选择是任意的。 大小有限 参考系:与参考物固连的整个空间,是抽象 的三维空间
运动学 引言
3/9
运动学 引言
4/9
地球参考系:与地球固连的抽象的三维空间 地心参考系:原点位于地心,坐标轴分别指向 三个恒星
无限延伸
可能只有参考系,而不一定有真实的参考体 一般工程问题,通常选取地球为参考系
论
6/21
刚体是抽象的力学模型,真实物体受力之 后都会变形,当物体的变形和运动尺度相 比小的多时,可以简化为刚体。
王仁:力学模型及其局限性,力学与实践, 2001年第2期,70-72
1
力学模型 研究卫星运动轨道时:卫星可视为质点 研究卫星姿态控制时:卫星应视为刚体 研究卫星的空间碎片防护时,卫星应视 为变形体
绪 论
19/21
绪 论
20/21
绪 论
21/21
4
运动学 运动学的任务 参考系和坐标系 矢量运算
运动学引言
第1篇 运动学 动学
2013年9月6日
2/9
运动学的任务 描述物体的机械运动,包括研究描述 运动的方式,确定速度、加速度和其 它运动学量的方法。 不考虑运动产生和变化的原因,仅从 几何的观点分析物体如何运动,确立 合适的方法描述运动。
由此得M点的轨迹方程为
x2 y2 1 a 2 b2
第1章
第1章
点 的 运动学
7/22
点 的 运动学
M b B x
M点的加速度为
xi yj a
O
B x
O
x0
y0
sin 2 cos ) i b( cos 2 sin ) j a (
(液体和气体)
绪 论
9/21
绪 论
理论力学是力学的基础!
上海南浦大桥
学科的性质
力学是一门基础学科 力学又是一门技术学科
力学是横跨理工的桥梁!
10/21
力学的应用领域
课程特点 理论力学课程内容是对数学、物理中 有关的基础理论进一步综合提高,面 向工程实际,形成独立的完整理论。 理论力学是学生进入大学后接触到的 第一门专业基础课,是工科教育中的 第一个至关重要的转折点。