三线摆测量物体的转动惯量实验过程分析和实验数据处理
三线摆测量物体的转动惯量实验过程分析和实验数据处理

三线摆测量物体的转动惯量实验过程分析和实验数据处理实验过程分析:1.实验原理:三线摆是一种常用的测量物体转动惯量的实验装置。
该装置采用三条细线将物体吊挂起来,并使其能够绕一个固定轴旋转。
当外力作用于物体时,物体会绕固定轴产生转动,利用转动角加速度、转轴位置和挂线长度等参数,可以计算出物体的转动惯量。
2.实验步骤:2.1准备实验装置:首先,将三线摆装置固定在实验台上,确保装置能够稳定运行。
然后,选择适量的物体,将它用细线固定在摆线的末端,并调整物体的位置,使其能够在转动过程中不与其他物体发生碰撞。
2.2测量物体的质量:使用天平测量物体的质量,并记录下来。
2.3调整各项参数:根据实验要求,调整各项参数,包括线长、转轴位置等,确保在实验过程中能够得到准确的数据。
2.4测量转动周期:用计时器测量物体的转动周期,并记录下来。
为了提高测量的准确度,可以多次测量,然后取平均值。
2.5计算转动惯量:根据实验原理,利用已知的参数和测量的数据,计算出物体的转动惯量。
3.数据处理:3.1绘制转动周期与线长的关系曲线:将测量到的转动周期(T)与线长(L)的数据绘制成图表,得到一条直线关系曲线。
根据转动周期和线长的关系,可以计算出转动的加速度(a)。
3.2计算转动惯量:根据转动加速度(a)和转轴位置(r),利用转动惯量的定义公式,可以计算出物体的转动惯量。
3.3数据分析与讨论:对实验数据进行分析和讨论,比较不同线长下的转动惯量大小,探讨转动惯量与物体质量、线长等因素的关系。
总结:通过三线摆测量物体的转动惯量实验,可以有效地测量物体的转动惯量,并探究转动惯量与线长、物体质量等因素的关系。
实验中需要注意调整各项参数和测量工具的准确性,以提高实验结果的可靠性和准确性。
用三线摆法测定物体的转动惯量的示范报告

用三线摆法测定物体的转动惯量的示范报告实验名称:三线摆法测定物体的转动惯量
目的:掌握三线摆法测定物体的转动惯量的原理以及实践方法。
材料:
一、实验仪器:多功能旋转电机、实验支架、振动延时表、实验架上有两个滑轮;
二、物体:实验用物体包括转子,转子有两个轴,一个上方轴接多功能旋转电机,另一个下方轴穿过实验支架,它配有光滑且无须子的活动轴承;
三、屏蔽线:以及相应的调节匹配的屏蔽线。
实施步骤:
1.将实验用转子安装在多功能旋转电机上,并将实验架上有两个滑轮绑定屏蔽线;
2.开启电机,使转子的转速恒定,使转子的转速持续恒定;
3.调节屏蔽线的长度,使转子旋转摆动,并记录自振动开始时间;
4.在固定时间内记录转子摆动运动次数,记录转子摆动的周期T;
5.计算出转子的转动惯量。
实验结果:
在实验中,我们通过绑定屏蔽线,使转子的转速持续恒定,由转子的转动惯量的公式计算得到转子的转动惯量为I=1.88(KG·m2)。
实验心得:
通过这次实验,我们了解到三线摆法测定物体转动惯量的原理以及实践方法。
首先,选择合适的实验用物体,并将它接通电源,控制它以恒定的转速旋转,然后绑定屏蔽线使转子摆动,并记录摆动次数以及摆动周期T,最后计算出转子的转动惯量。
用三线摆测物体的转动惯量
实验3用三线摆测定物体的转动惯量实验3 用三线摆测定物体的转动惯量转动惯量是刚体在转动中惯性大小的量度,它与刚体的质量的大小、转轴的位置和刚体质量的分布有关。
对于形状简单规则的均匀刚体,测出其外形尺寸和质量,可用数学方法计算出其绕特定转轴的转动惯量,而对于形状复杂,质量分布不均匀的刚体用数学方法求转动惯量非常困难,有时甚至不可能,一般要通过实验方法来测定。
测定刚体转动惯量的实验方法有多种,如三线摆法及转动惯量仪法等。
本实验用三线摆法测定刚体的转动惯量,其特点是操作简单。
为了便于与理论计算值比较,实验中被测物体仍采用形状简单规则的刚体。
对于形状较复杂的刚体,如枪炮、弹丸、电动机转子、机器零件等都可以测量出其转动惯量。
【实验目的】1. 学会正确测量长度、质量和时间的方法;2. 用三线摆测定圆盘和圆环对称轴的转动惯量;3. 验证转动惯量的平行轴定理。
【实验仪器】FB 210A 型三线摆组合实验仪、FB213A 型数显计时计数毫秒仪、米尺、游标卡尺。
【实验原理】物理学中转动惯量的数学表达式为∑∙=2iirm I 。
式中,m i 为质元的质量、r i 为该质元到转轴的距离。
1.测定悬盘绕中心轴的转动惯量J 0 图1是三线摆实验装置的示意图。
上、下圆盘均处于水平,悬挂在横梁上。
三个对称分布的等长悬线将两圆盘相连。
上圆盘固定,下圆盘可绕中心轴O O '作扭摆运动。
因悬盘来回摆动的周期与其转动惯量大小有关,所以,悬挂物不同,转动惯量也就不同,相应的摆动周期也将发生变化。
如图2示,当悬盘离开平衡位置向某一方向转过一个很小的角度θ时,整个悬盘的位置也将升高一高度h ,即悬盘既绕中心轴转动,又有升降运动,在任何时刻其转动动能为2012d J dt θωω⎛⎫= ⎪⎝⎭,上下运动的平动动能为⎪⎭⎫⎝⎛=dt dh v mv 221,重力势能为mgh ,如果忽略摩擦力,则在重力场中机械能守恒,即 2012d J dt θ⎛⎫ ⎪⎝⎭+221⎪⎭⎫⎝⎛dt dh m +mgh =恒量 (1)上式中m 为悬盘的质量,J 0为其转动惯量。
三线摆测转动惯量实验报告

三线摆测转动惯量实验报告实验目的:测量三线摆的转动惯量,了解其转动惯量的物理意义,并掌握利用物理量测量转动惯量的方法。
实验仪器:三线摆装置、定滑轮、弹簧秤、千分尺、定滑轮杆、试验台、计时器等。
实验原理:三线摆是由一个轻杆悬挂的固定框架,在轻杆的一端悬挂有一个小球,小球的转动惯量即为我们要测量的转动惯量。
在实验中,通过测量小球在不同长度的摆动轴上的摆动周期及周期对应的侧挠角度,利用转动惯量的定义式可以计算得到小球的转动惯量。
实验步骤:1. 将三线摆装置固定在试验台上,调整好其位置和高度,使其能够自由摆动且不受外界干扰。
2. 将小球悬挂在摆动轴的末端,并通过调整轻杆的长度使得小球与台面水平。
3. 分别将小球悬挂在不同长度的摆动轴上,然后用千分尺测量小球离轴线的距离,并记录下来。
4. 将小球拉到一侧,放开后用计时器计时该轮摆动的周期,并记录下来。
5. 重复步骤3和步骤4,至少进行3次测量,然后求得平均周期值和挠角的平均值。
6. 根据转动惯量的定义式及测得的数据,计算得到小球的转动惯量。
实验数据处理:根据实验所得的数据,可以通过以下公式求得小球的转动惯量:I = (T^2 * m * g * L) / (4 * π^2 * θ)其中,I为转动惯量,T为周期,m为小球质量,g为重力加速度,L为摆动轴的长度,θ为小球离轴线的最大挠角。
实验结果:根据实验数据和计算公式,可以求得小球的转动惯量。
根据实际情况,可能需要进行数据处理和修正,确保结果的准确性。
实验讨论与误差分析:在实验中,可能存在各种误差,如测量误差、摆动角度的影响等。
这些误差会对最终的结果产生一定的影响。
在实验中要注意减小各种误差的发生,提高实验结果的准确性。
结论:通过实验可以测量得到小球的转动惯量,并通过数据处理和计算得到最终的结果。
实验结果可以用来验证转动惯量的定义式,并了解物体转动惯量的物理意义。
实验结果应与理论值相近,若有误差应进行误差分析,并找出产生误差的原因。
三线摆转动惯量实验报告
三线摆转动惯量实验报告三线摆转动惯量实验报告引言:转动惯量是描述物体旋转惯性的物理量,它对于理解和研究物体在旋转过程中的运动规律具有重要意义。
本实验旨在通过测量三线摆的转动惯量,探究不同参数对转动惯量的影响,并验证转动惯量与物体几何形状、质量分布等因素之间的关系。
实验装置与方法:本实验采用三线摆装置,由一根细长的杆上悬挂一个小球,并通过细线将小球与杆连接。
实验过程中,调整细线的长度,使得小球能够在水平面内自由摆动。
通过改变小球的质量、杆的长度以及细线的长度等参数,来研究它们对转动惯量的影响。
实验步骤:1. 测量杆的长度:使用尺子准确测量杆的长度,并记录下来。
2. 测量小球的质量:使用天平准确测量小球的质量,并记录下来。
3. 调整细线长度:通过调整细线的长度,使得小球能够在水平面内自由摆动。
4. 测量摆动周期:用计时器测量小球在摆动过程中的周期,并记录下来。
5. 改变参数:依次改变小球的质量、杆的长度和细线的长度,重复步骤3和步骤4,记录数据。
实验结果与分析:根据实验数据,我们可以计算出不同参数下的转动惯量,并分析它们之间的关系。
1. 质量对转动惯量的影响:保持杆的长度和细线的长度不变,改变小球的质量,测量摆动周期。
通过计算转动惯量,我们可以发现质量与转动惯量之间存在线性关系,即转动惯量随质量的增大而增大。
2. 杆的长度对转动惯量的影响:保持小球的质量和细线的长度不变,改变杆的长度,测量摆动周期。
通过计算转动惯量,我们可以发现杆的长度与转动惯量之间存在二次关系,即转动惯量随杆的长度的增大先增大后减小。
3. 细线长度对转动惯量的影响:保持小球的质量和杆的长度不变,改变细线的长度,测量摆动周期。
通过计算转动惯量,我们可以发现细线长度与转动惯量之间存在反比关系,即转动惯量随细线长度的增大而减小。
结论:通过实验,我们验证了转动惯量与物体几何形状、质量分布等因素之间的关系。
质量对转动惯量有直接的线性影响,而杆的长度和细线的长度则对转动惯量有非线性的影响。
实验一报告 用三线摆测物体的转动惯量

由此可知圆盘的扭摆为简谐振动,解此微分方程得圆盘的振动周期=为:
于是:
此即为圆盘对中心竖轴转动惯量的实验公式。 在圆盘上同心叠放上质量为m的物体后,测出盘环系统的扭摆周期T,则盘环系统的转动惯量为:
总
由此可得物体转动惯量的实验公式:
三线摆实验原理如图所示,圆盘(下盘)由三根悬线悬挂于启动盘(上盘)之下,两圆盘圆心位于 同一竖直轴上。轻扭上盘,在悬线扭力的作用下、圆盘可绕其中心竖轴作小幅扭摆运动。
设圆盘的质量为m0,上下盘的盘距离为H、上下盘的受力半径为r和R、圆盘的扭摆角为θ(θ很 小)。
由于θ很小,所以圆盘在扭摆中升起的高度很小,可以认为在此过程中上下盘的间距H保持不变。 在此情况下,根据三角关系可以导出悬线拉力N对圆盘的扭力矩为:
更是达到几十倍,并且计算出来的 J1 比 J2 值要小也是违反常理,导致这么大的问题的原因是什么呢? 1、由于是居家实验,实验器材简陋,实验操作也比较粗糙,上下盘的不完全水平平行、三线摆上下盘 与绳子结点不完全是等边三角形、质量(用弹簧秤测量)和长度(用软尺测量)的测量误差较大、 phyphox 软件本身的测量也有一定误差等,这些由于实验器材和实验操作所造成的误差会对结果造成 一定的误差,但是这并不足以解释测量值和理论值存在的这么的的差距,更无法解释 J1 比 J2 的反常差 值。 2、经过分析,认为造成测量值与理论的如此大的差距的原因可能存在于测量的原理上,原理示意图中 是上盘比较小而下盘比较大,但实际试验操作是上盘是大于下盘,可能导致了推导出的计算式的不成立
tf1(s)
30T1(s) ti2(s)
tf2(s)
30T2(s)
用三线摆测刚体转动惯量实验报告

用三线摆测刚体转动惯量实验报告三线摆是一种常用的实验装置,用于测量刚体的转动惯量。
在本实验中,我们通过观察和测量三线摆的周期和长度,来计算刚体的转动惯量。
以下是本次实验的详细过程和结果分析。
实验装置包括一个可调节长度的摆线,一个固定在支架上的底座,以及一个刚体。
首先,我们将摆线固定在底座上,并调节其长度,使得刚体可以在摆线上自由摆动。
然后,我们将刚体轻轻拉至一侧,释放后观察其摆动的周期。
重复多次实验,记录下每次摆动的时间。
在实验过程中,我们保持摆线的长度不变,只调整刚体的位置,并记录下每次摆动的时间。
通过多次实验的数据,我们可以计算出摆动的平均周期。
接下来,我们需要测量摆线的长度。
我们用直尺测量摆线的长度,并记录下来。
同样地,我们进行多次测量,然后求出平均值。
通过实验数据的记录和计算,我们可以得到刚体的转动惯量。
根据刚体的转动定律,转动惯量与摆动的周期和摆线长度有关。
具体地说,转动惯量正比于周期的平方,同时与摆线长度的平方成反比。
在实验中,我们可以通过以下公式来计算转动惯量:I = T^2 * L / (4 * π^2)其中,I表示转动惯量,T表示周期,L表示摆线长度,π表示圆周率。
通过实验数据和上述公式,我们可以计算出刚体的转动惯量,并得到最终的结果。
在本次实验中,我们通过使用三线摆测量刚体的转动惯量。
通过观察和测量摆动的周期和摆线的长度,我们可以计算出刚体的转动惯量。
这个实验对于研究刚体的转动性质和物理规律具有重要意义。
总结起来,本次实验通过使用三线摆测量刚体的转动惯量。
我们通过观察和测量摆动的周期和摆线的长度,计算出刚体的转动惯量。
这个实验的结果对于研究刚体的转动性质和物理规律具有重要意义。
通过实验的过程,我们了解到了刚体的转动惯量与周期和摆线长度的关系,同时也熟悉了实验的操作步骤和计算方法。
通过这次实验,我们对刚体的转动性质有了更深入的理解。
三线摆测量物体的转动惯量实验过程分析和实验数据处理
三线摆测物体的转动惯量7.预习思考题回答(1)用三线摆测刚体转动惯量时,为什么必须保持下盘水平?答:扭摆的运动可近似看作简谐运动,以便公式推导,利用根据能量守恒定律和刚体转动定律均可导出物体绕中心轴的转动惯量公式。
(2)在测量过程中,如下盘出现晃动,对周期有测量有影响吗?如有影响,应如何避免之?答:有影响。
当三线摆在扭动的同时产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差,其误差的大小是与晃动的轨迹以及幅度有关的。
(3)三线摆放上待测物后,其摆动周期是否一定比空盘的转动周期大?为什么? 答:不一定。
比如,在验证平行轴定理实验中,d=0,2,4,6cm 时三线摆周期比空盘小;d=8cm 时三线摆周期比空盘大。
理论上,220100020[()]04x gRrI I I m m T m T H π=-=+-> 所以22000()0m m T m T +->=〉0/T T >1,并不能保证0/1T T >,因此放上待测物后周期不一定变大。
(4)测量圆环的转动惯量时,若圆环的转轴与下盘转轴不重合,对实验结果有何影响?答:三线摆在扭摆时同时将产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差。
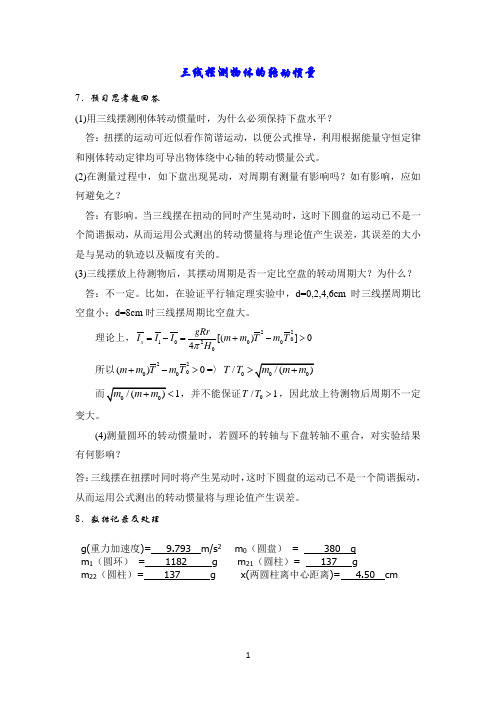
8.数据记录及处理g(重力加速度)= 9.793 m/s 2 m 0(圆盘) = 380 g m 1(圆环) = 1182 g m 21(圆柱)= 137 gm 22(圆柱)= 137 g x(两圆柱离中心距离)= 4.50 cm表 1 待测刚体的有关尺寸数据的记录及简单计算表 2 待测刚体的摆动时间的数据表(周期数为35)二、实验过程记录1)各个多次测量的物理量的平均值及不确定度:501049.45()5ii t t s ===∑;00.04t s ==0.04t u===; t 0=49.45±0.04(s) 511148.92()5ii tt s ===∑;1)t S s =10.05t u==(s ); t 1=48.92±0.05(s) 521247.08()5ii tt s ===∑;2)t S s =20.25()t s u==; t 2=47.08±0.25(s) 2) 待测物体的转动惯量 下盘加圆环: a )空盘的转动惯量:32222200000222200321182109.7937.6681016.091049.45()1212 3.1444.89103545.347510(.)m gRr m gab I T T H H kg m ππ-----⨯⨯⨯⨯⨯⨯===⨯⨯⨯=⨯ b )空盘加圆环的转动惯量:232212102212032()(3801182)109.7937.6681016.0951048.92()12 3.1444.891035126.966810(.)m m gabT H kg m I π-----++⨯⨯⨯⨯⨯⨯==⨯⨯⨯=⨯c )圆环的转动惯量平均值:33210(6.9668 5.3475)10 1.619310(.)I I I kg m --=-=-⨯=⨯ 圆环转动惯量结果表示:I u ===521.66310(.)kg m -=⨯=〉32(1.6190.017)10()0.017100%100%1%1.619I I Ir I I u k u u I-⎧=±=±⨯⎪⎨=⨯=⨯=⎪⎩g.m 下盘与两圆柱体:22222020202122002122002200222232242[()][()]4129.7937.6681016.0951047.0849.45[(1371371182)()1182()]1012 3.1444.891035356.258710(.)x gRr gabI I I m m m T m T m m m T m T H H kg m ππ-----=-=++-=++-⨯⨯⨯⨯=++⨯-⨯⨯⨯⨯⨯=⨯x I u ====526.307410(.)kg m -=⨯结果表示:42(6.30.6)10(.)100%9%xxx x I I Ixr x I I u kg m u u I -⎧=±=±⨯⎪⎨=⨯=⎪⎩ 理论公式: 3)百分误差的计算a)圆环的转动惯量理论公式:223224321121I ()38010(10.01615.010)10 1.546710(.)448D D m kg m ---=+=⨯⨯⨯+⨯=⨯内外理论相对误差:1.6193 1.5467100%100% 4.7%1.5467I I I --⨯=⨯=理论理论 b)圆柱的转动惯量理论公式:22212221222122123222242I ()()()2224113710[(2.49010)(4.510)]82.88010(.)m m x x m m D D kg m ----++++=+=⨯⨯⨯⨯+⨯=⨯2122x 理论相对误差:2 6.2587 2.8802100%100%8.7%2 2.8802x I I I --⨯⨯=⨯=⨯理论理论9.数据分析圆环的相对不确定度波动较小,为1%。
实验 三线摆法测量物体的转动惯量

实验 三线摆法测量物体的转动惯量转动惯量是刚体转动惯性大小的量度,是表征刚体特征的一个物理量。
转动惯量的大小除与物体质量有关外,还与转轴的位置和质量分布(即形状、大小和密度)有关。
如果刚体形状简单,且质量分布均匀,可以直接计算出它绕特定轴的转动惯量。
但是工程实践中,我们常常碰到大量的形状复杂,且质量分布不均匀刚体,理论计算将极其复杂,通常采用实验方法来测定。
转动惯量的测量,一般都是使刚体以一定的形式运动。
通过表征这种运动特征的物理量与转动惯量之间的关系,进行转换测量。
测量刚体转动惯量的方法有多种,三线摆法具有设备简单、直观、测试方便的优点。
一.实验目的1. 学会用三线摆测量物体的转动惯量。
2. 学会用积累放大法测量扭摆运动的周期。
3. 验证转动惯量的平行轴定理。
二. 实验仪器DH4601转动惯量测试仪,计时器,圆环,圆柱体,游标卡尺,米尺,水平仪三. 实验原理图1是三线摆实验装置的示意图。
上、下圆盘均处于水平,悬挂在横梁上。
三个对称分布的等长悬线将两圆盘相连。
上圆盘固定,下圆盘转动角很小,且略去空气阻力时,扭摆的运动可以近似的看作简谐运动。
根据能量守恒定律和刚体的转动定律均可以导出物体绕中心轴OO ’的转动惯量(推导过程见附录):2002004T H gRr m I π=(1-1) 式中各物理量的含义如下:0m 为下盘的质量r 、R 分别为上下悬点离各自圆盘中心的距离0H 为平衡时上下盘间的垂直距离0T 为下盘作简谐运动的周期,g 为重力加速度。
将质量为m 的待测圆环放在下盘上,并使待测圆环的转轴与OO ’轴重合。
测出此时摆运动的周期1T 和上下圆盘间的垂直距离H 。
那么,可以求得待测刚体和下圆盘对中心转轴OO ’的总转动惯量为:212014T HgRr m m I π)(+=(1-2) 图1 三线摆实验示意图如果不计因重量变化而引起的悬线伸长,则有0H H ≈。
那么,待测物体绕中心轴OO ’的转动惯量为:])[(2002102014T m T m m HgRr I I I -+=-=π (1-3) 因此,通过长度、质量和时间的测量,便可以求出刚体绕某轴的转动惯量。
三线摆测转动惯量实验报告

三线摆测转动惯量实验报告实验报告是个很重要的东西,尤其是像三线摆测转动惯量这种实验。
今天咱们就来聊聊这个实验,看看它的过程、结果和收获。
首先,实验的背景就很有趣。
转动惯量,听起来很复杂,但其实就是物体转动时的“懒惰程度”。
越大的转动惯量,物体转动起来越费劲。
三线摆,简单来说,就是用三根线把一个物体悬挂起来,让它转动。
通过这个实验,我们能更直观地理解物体的转动特性。
接下来,咱们说说实验的准备工作。
材料简单明了,咱们需要一个圆盘,几根线,还有一个支架。
圆盘的质量和半径都要准确,这关系到结果的精确性。
准备工作可不能马虎,细节决定成败嘛。
1.1 圆盘的选择我们选择的圆盘是均匀的,质量分布也很均匀,这样计算转动惯量时才不会偏差。
然后,测量半径时,心里得小心翼翼,毕竟这可是直接影响实验结果的。
用游标卡尺量的时候,得保证没有任何误差,尽量做到精确到毫米。
1.2 三根线的固定接着,三根线要固定得稳稳的。
为了确保摆动时不出错,咱们得把线的长度调到一致。
用夹具把线固定好,确保圆盘在空中能自由转动。
固定这一环节,别小看,稍微不稳就会影响后面的实验数据。
说完准备工作,咱们进入实验过程。
这时候,心里会有点小紧张,毕竟所有的准备都在这一刻见分晓。
2.1 摆动的实验把圆盘悬挂起来,轻轻一推,圆盘就开始摆动。
看着它在空中划出优美的弧线,心里不禁觉得很美妙。
每一次摆动,我都仔细观察,记录下摆动的时间和角度。
用秒表计时时,手不能抖,得保持稳稳的状态。
2.2 数据记录摆动了好几次,终于得到了足够的数据。
每一次的实验结果都有些许不同,但大体上能看出规律。
数据记录时,心中一阵激动,觉得一切的努力都没白费。
然后,把这些数据整理到表格里,做出计算,得到转动惯量的结果。
2.3 结果分析分析结果的时候,得意忘形的感觉油然而生。
通过公式算出的转动惯量,和理论值相差不大,心里满是成就感。
想想当初的担心,果然“磨刀不误砍柴工”。
这次实验让我体会到了实践的重要性。
物理实验居家三线摆测量刚体转动惯量实验数据及完整实验报告含不确定度分析

2020年春季大学物理实验<4>专业班级:学号:姓名:日期:实验名称:三线摆测量刚体转动惯量实验目的:学习测量物体转动惯量的简便方法三线扭摆法;加深对转动惯量、机械能守恒定律、简谐振动等理论的理解参考时,麻烦注意数据和格式的替换,楼主也是学生党,这是我自己的实验报告实验仪器材料:细线、米尺、蒸格、纸杯、秒表、针、电子秤、胶水实验方案设计:<思路>1.下方物体半径、上方物体半径、绳长参数选择结合不确定度传递公式,尽量减小误差2.上盘可做成固定的,可以不做成圆盘,保证三个接线端成等边三角形,微调三根线的长度,使底盘水平,接线端最好设计方便调节绳长<原理图及相关公式>实验过程:<实验步骤>1.用针在纸杯的四周均匀穿入三根线,另一端均匀地环绕系在蒸格上,制成一个三线摆2.稍稍微调三根线的长度,使底盘水平3.测量记录下盘质量m0以及R、r、H,每个量测量3次取平均参考时,麻烦注意数据和格式的替换,楼主也是学生党,这是我自己的实验报告4.轻轻转动底盘,摆角不超过5度,测40周期总的时间,总共测量5组,计算平均值5.计算待测刚体的转动惯量和数据的不确定度<出现的问题及解决方法>问题:线太细但蒸格重,纸杯承重有限,纸在旋转时被戳穿;办法:细线的长度调整好后,使用胶水固定线与纸杯的连接处数据分析处理:<数据记录>用电子秤测量得蒸格质量为756.6g参考时,麻烦注意数据和格式的替换,楼主也是学生党,这是我自己的实验报告<计算过程及结果> 将上述实验数据代入 I 0=m 0gRr 4π2HT 2,由公式计算得到I 0=6.09×10−3kg ∙m 2现将不确定度分析如下: 1.蒸格质量的不确定度,A 类不确定u A (m 0̅̅̅̅)=0,B 类不确定u B (m 0̅̅̅̅)=∆3=0.03g2.蒸格摆动周期的不确定度,A 类不确定u A (T ̅)=√∑(T i −T )ni=1n (n−1)=0.011s , B 类不确定u B (T ̅)=∆√3=0.006s3.纸杯口半径的不确定度, A 类不确定u A (r̅)=√∑(r i −r̅)2n i=1n (n−1)=0.2mm , B 类不确定u B (r̅)=∆√3=0.08mm4.蒸格半径的不确定度,参考时,麻烦注意数据和格式的替换,楼主也是学生党,这是我自己的实验报告A 类不确定u A (R ̅)=√∑(R i −R ̅)2ni=1n (n−1)=0.12mm , B 类不确定u B (R ̅)=∆√3=0.08mm5.上下圆盘间距的不确定度,A 类不确定u A (H ̅)=√∑(H i −H ̅)2ni=1n (n−1)=0.58mm , B 类不确定u B (H ̅)=∆3=1.9mm综上,由传递公式计算转动惯量的不确定度u (I )=I 0∙√∑(ðlnfðx i∙u r x i )2n i=1=8.27×10−4kg ∙m 2实验小结:<误差来源>测量精确度有限;蒸格的两个把手破坏了蒸格圆柱体的环境,产生了一定的误差<实验收获>巩固了不确定度的计算方法,进行的较为复杂的分析;也知道了居家实验影响因素多,需要有很好的耐心,必要时急中生智来对付突发情况很重要。
用三线摆测量转动惯量实验报告
用三线摆测量转动惯量实验报告用三线摆测量转动惯量实验报告摘要:本实验通过使用三线摆测量的方法,对不同物体的转动惯量进行了测量。
通过实验数据的分析,得出了物体的转动惯量与质量、长度以及摆动周期的关系,并验证了转动惯量的平行轴定理。
实验结果表明,三线摆测量是一种有效且准确的测量转动惯量的方法。
引言:转动惯量是描述物体对转动运动的惯性的物理量。
在实际应用中,准确测量物体的转动惯量对于设计和优化机械系统非常重要。
本实验使用了三线摆测量的方法,该方法通过测量摆动周期和其他参数,可以计算出物体的转动惯量。
本实验旨在通过实验数据的分析,探究转动惯量与物体的质量、长度以及摆动周期之间的关系,并验证转动惯量的平行轴定理。
实验装置和原理:本实验使用了三线摆测量仪器,包括一个可调节长度的摆线、一个固定在支架上的固定线和一个可以固定在物体上的可调节线。
实验中,固定线和可调节线之间的距离被称为摆长。
当物体在摆线上摆动时,可以通过测量摆动周期来计算物体的转动惯量。
实验过程:1. 将摆线固定在支架上,并调整其长度,使得物体可以在摆线上自由摆动。
2. 将物体固定在可调节线上,并调整可调节线的长度,使得物体可以在摆线上摆动。
3. 记录物体在摆线上的摆动周期。
4. 重复步骤2和步骤3,使用不同的物体进行实验。
实验结果和数据分析:通过实验记录的数据,我们可以计算出每个物体的转动惯量。
假设物体的质量为m,摆长为L,摆动周期为T,则根据公式I = mL^2/T^2,可以计算出物体的转动惯量。
通过对多组实验数据的分析,我们可以得到物体的转动惯量与质量和摆长的平方成正比,与摆动周期的平方成反比的关系。
进一步分析数据,我们可以验证转动惯量的平行轴定理。
平行轴定理指出,如果一个物体绕通过其质心的轴转动惯量为I0,绕与质心平行且距离为d的轴转动惯量为I,则有I = I0 + md^2。
通过实验数据的计算,我们可以验证该定理的准确性。
讨论和结论:本实验使用了三线摆测量的方法,通过测量摆动周期和其他参数,成功测量了不同物体的转动惯量。
用三线扭摆法测定物体转动惯量及其实验误差

用三线扭摆法测定物体转动惯量及其实验误差(东南大学电气工程学院,南京 211189)摘要:通过实验熟悉秒表、水平仪、游标卡尺、米尺等仪器的使用,掌握质量和周期等量的测量方法;了解用三线摆测转动惯量的原理和方法,研究刚体转动惯量与质量分布的关系;最后巩固误差并对测试结果做了分析。
摘要:转动惯量;质量分布;三线扭摆;平行轴定理;实验误差Measuring Moment of Inertia Using Trilinear Pendulum and its Experimental Error(School of Electrical Engineering, Nanjing, 211189)Abstract: Through the experiment with stopwatch, level gauge, vernier caliper, meter and instrument using, grasp the quality and cycle equivalent measurement method; learn to use the three wire pendulum for measuring moment of inertia of the principle and method of moment of inertia of rigid body, and mass distribution of the relationship; consolidate finally error and the test results were analyzed.key words: Moment of intertia; Mass distribution; torsional pendulum; parallel exis theorem; Experimental error转动惯量是刚体转动惯性大小的量度,它与刚体的质量、转轴位置及质量相对转轴的分布情况有关。
700108三线摆测量转动惯量(实验8)

用三线摆测物体的转动惯量实验报告【一】实验目的及实验仪器实验目的:1.掌握三线摆测量转动惯量的原理和方法。
2.学会正确测量长度、质量和时间的方法。
3.学会用三线摆测量圆盘和圆环绕对称轴的转动惯量。
实验仪器:三线摆、气泡水准器、钢卷尺、游标卡茨、物理天平、秒表、待测圆环。
【二】实验原理及过程简述实验原理:1. 在重力场作用下,圆盘B 在运动过程中机械能守恒Jw 0^2=mgh2. 由于a0很小,圆盘运动可看做简谐运动,这样圆盘最大角速度为w 0=2πα/T3. T 为圆盘的运动周期、L 为悬线长度、系绳点到圆盘B 的铁盘A中心距离分别为R 和r ,则HgRrT M J 224π盘盘=由实验测出m 、r 、R 、H 和T 的值,可以计算出圆盘的转动惯量。
圆环转动惯量的测量原理与上述相同。
实验过程:1.利用气泡水准器调节铁盘水平,调节圆盘水平,轻轻转动水平铁盘,使圆盘获得一个小冲量矩后能够来回自由转动。
2.待测圆盘做稳定摆动时,用停表测出它来回摆动50次所需要的总时间,重复三次,算出周期的平均值T 。
3.测出L 、R 和r ,读取圆盘上已标质量,算出圆盘的转动惯量。
4.测出圆环的转动惯量。
将圆环加在圆盘上面,使圆环中心和圆盘中心重合,按上述步骤测出周期T`,利用式H'gRrT )M M (J 224π环盘环盘+=+算出圆盘加圆环的总转动惯量,将总转动惯量减去圆盘的转动惯量,得到圆环的转动惯量的测量值。
盘环盘环J J J -=+5.测出圆盘的半径R0以及圆环的内径a 和外径b ,用求转动惯量的理论公式:221R M 'J 盘盘=,)b a (M 'J 2221+=环环 实验值和理论值进行比较,分别求出相对误差和绝对误差。
【三】实验数据处理及误差计算: 数据记录:1. 圆盘转动惯量的测量值:HgRrT M J 224π盘盘=R=165.967÷3^1/2 =95.821 mm ; r=79.120÷3^1/2 =45.680 mm ;H=[L^2-(R-r )^2]^1/2 =455.650 mm ; T=75.377s/50=1.508s; 取g=9.8m/s 2HgRrT M J 224π盘盘= =1420.6×10-3×9.8×95.821×45.680×(1.508)2/4π2×455.650 g ·mm 2 =7.711.46 kg ·mm 22. 计算圆盘+圆环转动惯量的测量值:H'gRrT )M M (J 224π环盘环盘+=+T`=70.243s/50=1.405s;H'gRrT )M M (J 224π环盘环盘+=+=(1420.6+637.8)×9.8×103×95.821×45.680×(1.405)2/4π2×455.650 g ·mm 2 =9.689.56 g ·mm 23. 计算圆环转动惯量的测量值:盘环盘环J J J -=+盘环盘环J J J -=+=(9689.56-7711.46) g ·mm 2=1978.10 g ·mm 24. 计算圆盘转动惯量的理论值:221R M 'J 盘盘=R 0=199.513mm/2=99.7565mm221R M 'J 盘盘==1420.6×(99.7565)2÷2 g ·m 2=7068.45 kg ·mm 2 5. 计算圆环转动惯量的理论值; )b a (M 'J 2221+=环环a=49.709mm/2=24.8545 mm; b=159.46mm/2=79.73 mm.)b a (M 'J 2221+=环环=637.8×10-3×[(24.8545)2+(79.73)2] g ·mm 2=2224.21 kg ·m 2 6. 计算绝对误差、相对误差:|'J J |J 盘盘盘-=∆=|7711.46-7068.45|=643.01 kg ·m 2|'J J |J 环环环-=∆=|2224.21-1978.10|= kg ·m 2%'J J E 100盘盘盘∆==(7711.46-7068.45)/7068.45=9.10% ;相对误差E=0.0910 %'J J E 100环环环∆==(2224.21-1978.10)/1978.10=12.44% ;相对误差E=0.1244【四】实验结果表达:思考题:1.为什么要求两盘水平、3根悬线相等? 答:(1)保证受力平衡,使圆盘各处上升高度相同,保证圆盘做简谐运动。
三线摆测转动惯量实验报告
实验9 三线摆测转动惯量一、实验目的1.掌握三线摆法测物体转动惯量的原理和方法。
2.学习用水准仪调水平,用光电门和数字毫秒仪精密测量扭转周期。
3.验证转动惯量的平行轴定理。
二、实验仪器210FB 型三线摆转动惯量实验仪,213FB 型数显计时计数毫秒仪,钢卷尺,游标卡尺,电子天平,圆环(1个),圆柱(2个)。
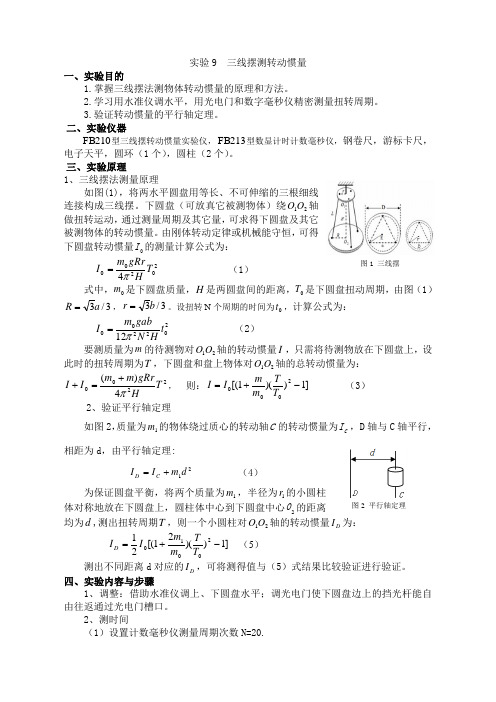
三、实验原理1、三线摆法测量原理如图(1),将两水平圆盘用等长、不可伸缩的三根细线连接构成三线摆。
下圆盘(可放真它被测物体)绕21O O 轴做扭转运动,通过测量周期及其它量,可求得下圆盘及其它被测物体的转动惯量。
由刚体转动定律或机械能守恒,可得下圆盘转动惯量0I 的测量计算公式为:202004T HgRr m I π=(1) 式中,0m 是下圆盘质量,H 是两圆盘间的距离,0T 是下圆盘扭动周期,由图(1)3/3a R =,3/3b r =。
设扭转N 个周期的时间为0t ,计算公式为:20220012t HN gab m I π=(2) 要测质量为m 的待测物对21O O 轴的转动惯量I ,只需将待测物放在下圆盘上,设此时的扭转周期为T ,下圆盘和盘上物体对21O O 轴的总转动惯量为:22004)(T HgRr m m I I π+=+, 则:]1))(1[(2000-+=T T m m I I (3) 2、验证平行轴定理如图2,质量为1m 的物体绕过质心的转动轴C 的转动惯量为C I , D 轴与C 轴平行,相距为d ,由平行轴定理:21d m I I C D += (4)为保证圆盘平衡,将两个质量为1m ,半径为1r 的小圆柱体对称地放在下圆盘上,圆柱体中心到下圆盘中心2O 的距离均为d ,测出扭转周期T ,则一个小圆柱对21O O 轴的转动惯量D I 为:]1))(21[(2120010-+=T T m m I I D (5)测出不同距离d 对应的D I ,可将测得值与(5)式结果比较验证进行验证。
三线摆测刚体转动惯量实验报告(带数据)

曲阜师范大学实验报告实验日期:2020.5.24 实验时间:8:30-12:00姓名:方小柒学号:**********年级:19级专业:化学类实验题目:三线摆测刚体转动惯量一、实验目的:1.学会用三线摆法测定物体转动惯量原理和方法。
2.学会时间、长度、质量等基本物理量的测量方法以及仪器的水平调节。
二、实验仪器:三线摆,待测物体(圆环和两个质量和形状相同圆柱),游标卡尺,米尺,电子秒表,水平仪三、实验原理:转动惯量是物体转动惯性的量度,物体对某轴的转动惯量越大,则绕该轴转动时,角速度就越难改变。
三线摆装置如图所示,上下两盘调成水平后,两盘圆心在同一垂直线O1O2上。
下盘可绕中心轴线O1O2扭转,其扭转周期T和下盘的质量分布有关,当改变下盘的质量分布时,其绕中心轴线O1O2的扭转周期将发生变化。
三线摆就是通过测量它的扭转周期去求任意质量已知物体的转动惯量的。
三摆线示意图当下盘转动角度θ很小,且略去空气阻力时,悬线伸长不计,扭摆的运动可近似看作简谐运动。
根据能量守恒定律和刚体转动定律均可以得出物体绕中心轴OO′的转动惯量:下盘:J=下盘+圆环:J1=圆环:J= J1- J0=(条件:θ≤5°,空气阻力不计,悬线伸长不计,圆环与下盘中心重合)因此,通过长度、质量和时间的测量,便可求出刚体绕某轴的转动惯量。
四、实验内容:1.了解三线摆原理以及有关三线摆实验器材的知识。
2.用三线摆测量圆环的转动惯量,并验证平行轴定理(1)测定仪器常数H、R、r恰当选择测量仪器和用具,减小测量不确定度。
自拟实验步骤,确保三线摆上、下圆盘的水平,是仪器达到最佳测量状态。
(2)测量下圆盘的转动惯量线摆上方的小圆盘,使其绕自身转动一个角度,借助线的张力使下圆盘作扭摆运动,而避免产生左右晃动。
自己拟定测量下圆盘转动惯量的方法。
(3)测量圆环的转动惯量盘上放上待测圆环,注意使圆环的质心恰好在转动轴上,测量圆环的质量和内、外直径。
三线摆测转动惯量实验报告

所以有: BC1 2 A1B2 A1C1 2 l 2 R 2 r 2 2Rr cos 0
整理后可得:
h
2Rr(1
cos 0 )
4Rr
sin 2
0 2
BC BC1
BC BC1
BC BC1 2H ;摆角很小时有: sin( 0 2 ) 0 2
所以: h
Rr
2 0
2H
I 整理得:
D D I 1 M 8
2
1
2 2
四、实验内容
1、三线摆法测定圆环绕中心轴的转动惯量
a、用卡尺分别测定三线摆上下盘悬挂点间的距离 a、b(三个边各测一次再平均);
b、调节三线摆的悬线使悬盘到上盘之间的距离 H 大约 50cm 多;
c、调节三线摆地脚螺丝使上盘水平后再调节三线摆悬线的长度使悬盘水平;
0.015
u s a
2 a
m 3
2
0.015 2
0.002 3
2
0.015
3
bi
s b i1
3
11.311cm ;
b
3 b bi 2
i 1
31
0.015
u s b
2 b
m 3
2
0.015 2
0.002 3
2
0.015
6
Hi
s H i1
6
49.63cm ;
H
6
H
Hi
2
i 1
6 1
0.078
u s H
2 H
m 3
2
0.078 2
0.05 3
2
0.084
6
ti
s t i1
6
86.02s ;
三线摆测转动惯量实验报告

三线摆测转动惯量实验报告一、实验目的1、掌握三线摆测定物体转动惯量的原理和方法。
2、学会使用秒表、游标卡尺、米尺等测量工具。
3、加深对转动惯量概念的理解,以及其与物体质量分布和转轴位置的关系。
二、实验原理三线摆是由三根长度相等的摆线将一匀质圆盘悬挂在一个水平的圆盘支架上构成的。
当摆盘绕中心轴扭转一个小角度后,在重力作用下,摆盘将作周期性的扭摆运动。
设下圆盘质量为$m_0$,半径为$R_0$,上圆盘质量为$m$,半径为$r$,两圆盘之间的距离为$H$,扭转角为$\theta$。
当下圆盘扭转一个小角度$\theta$ 后,其势能的改变为:$\Delta E_p = m_0 g \Delta h$其中,$\Delta h$ 为下圆盘重心下降的高度。
由于扭转角度很小,$\sin\theta \approx \theta$,则:$\Delta h =\frac{R_0^2\theta^2}{2H}$根据能量守恒定律,摆动过程中势能与动能相互转化,且机械能守恒。
当下圆盘摆动到最大角度时,动能为零,势能最大;当下圆盘经过平衡位置时,势能为零,动能最大。
设下圆盘摆动的周期为$T_0$,则其转动惯量$I_0$ 为:$I_0 =\frac{m_0gR_0^2T_0^2}{4\pi^2H}$对于质量为$m$ 的待测物体放在下圆盘上时,系统的转动惯量为$I$,摆动周期为$T$,则有:$I = I_0 + m\left(\frac{r^2}{2} + H^2\right)$从而可求得待测物体的转动惯量$I$ 为:$I =\frac{m_0gR_0^2T^2}{4\pi^2H} m_0\left(\frac{r^2}{2} + H^2\right)$三、实验仪器三线摆实验仪、游标卡尺、米尺、秒表、待测物体(圆环、圆柱等)。
四、实验步骤1、调节三线摆装置调节底座水平,使上、下圆盘处于水平状态。
调节三根摆线等长,且长度约为 50cm 左右。
三线摆测物体转动惯量实验报告

三线摆测物体转动惯量实验报告摘要:本实验通过使用三线摆装置,测量不同物体在转动过程中的角加速度,进而计算得出物体的转动惯量。
实验结果表明,不同形状和质量的物体具有不同的转动惯量,验证了转动惯量与物体形状和质量分布有关的结论。
引言:转动惯量是描述物体转动惯性的物理量,对于研究旋转运动以及理解物体在转动过程中的稳定性具有重要意义。
本实验使用三线摆装置,通过测量物体的加速度与力矩的关系,来研究物体转动惯量与其形状和质量分布的相关性。
实验装置与原理:1. 实验装置:三线摆装置、电子计时器、物体(包括圆环、圆盘等不同形状和质量的物体)2. 实验原理:三线摆实验是利用释放物体后,通过测量物体的加速度来推导出转动惯量。
根据牛顿第二定律和转动定律,可得到如下关系式:I = (m * g * l) / (α - β)其中,I为物体的转动惯量,m为物体的质量,g为重力加速度,l 为线长,α为测量得到的角加速度,β为摆放线本身的角加速度。
实验步骤与数据处理:1. 搭建三线摆装置,并调整每根线的长度一致,保持摆放线与竖直方向的夹角为20°。
2. 选择不同形状和质量的物体进行实验。
首先测量物体的质量m,并计算出物体的质心到摆放线的垂直距离l。
3. 将物体固定在摆放线上,释放摆线并使物体进行自由旋转。
4. 同时用电子计时器测量摆放线上一定长度内的自由旋转时间t,并记录下物体自由旋转的圈数n。
5. 重复以上实验步骤3-4多次,取得多组测量数据并计算平均旋转时间t和平均圈数n。
6. 通过角度关系计算得到物体的角加速度α=(2πn)/t。
7. 根据实验原理中的公式,计算得到物体的转动惯量I。
实验结果与分析:将实验得到的数据整理如下:物体形状质量(m) 距离(l) 旋转时间(t) 圈数(n) 角加速度(α) 转动惯量(I)圆环 0.2kg 0.3m 1.64s 5 3.82 rad/s^2 0.16 kg·m^2圆盘 0.3kg 0.4m 2.02s 6 5.95 rad/s^2 0.18 kg·m^2...通过实验结果可以观察到不同形状和质量的物体具有不同的转动惯量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三线摆测物体的转动惯量7. 预习思考题回答(1)用三线摆测刚体转动惯量时,为什么必须保持下盘水平?答:扭摆的运动可近似看作简谐运动,以便公式推导,利用根据能量守恒定律和刚体转动定律均可导出物体绕中心轴的转动惯量公式。
⑵在测量过程中,如下盘出现晃动,对周期有测量有影响吗?如有影响,应如何避免之?答:有影响。
当三线摆在扭动的同时产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差,其误差的大小是与晃动的轨迹以及幅度有关的。
(3)三线摆放上待测物后,其摆动周期是否一定比空盘的转动周期大?为什么?答:不一定。
比如,在验证平行轴定理实验中,d=0,2,4,6cm时三线摆周期比空盘小;d=8cm时三线摆周期比空盘大。
理论上,匸几-叮粤[(m m0)T2-m0T0] 04兀H°2 2所以(m m0)T -m0T o 0 = >T /T0, m0/(m m o)而.m0 /(m m0)1,并不能保证T /T0 1,因此放上待测物后周期不一定变大。
(4)测量圆环的转动惯量时,若圆环的转轴与下盘转轴不重合,对实验结果有何影响?答:三线摆在扭摆时同时将产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差。
8. 数据记录及处理1)各个多次测量的物理量的平均值及不确定度 :g(重力加速度)=9.793 m/s 2 m i (圆环) = 1182 ____ g m 22 (圆柱)= 137 gm o (圆盘)= 380 gm 2i (圆柱)= 137 g x (两圆柱离中心距离)= 4.50 cm3 2= 6.9668 i0 (kg.m )c )圆环的转动惯量平均值:I = l i -丨0 = (6.9668-5.3475) i0 =i.6i93 i0 (kg.m 2)圆环转动惯量结果表示t o5 、t 0ii 4= 49.45 (s) ;s5 -我0 -垢i- ------------ 0.045-1Ut 0闊 +(M B 2 = J0.042+(0.0003)2 = 0.04; t 0=49.45 ± 0.04(s)t i5 —tii三 48.92 (s) ; S t i 二5、(t ii -t ;)2i----------- 0.05(s) n —iU t =s 亠「、u B- • 0.05 亠i 0.0003 =0.05 (s ) ; t i =48.92 ± 0.05(s)^25 二 t2i i =4= 47.08 (s) ;Q 二 5二(t 2i -12)i----------- 0.25(s)n -iUt 2直2 +(A U B i = J0.252+(0.0003$ = 0.25(s); t 2=47.08土 0.25(s)2)待测物体的转动惯量下盘加圆环:a )空盘的转动惯量:m °gRr 匚2 m °gab 2^T ^^T0ii82 i0‘ 9.793 7.668 i0‘ i6.09 i0‘2Z2i2 3.i444.89 i0(49.45)2(35 )32= 5.3475 i0 (kg.m 2)b )空盘加圆环的转动惯量:Ii2(m i m °)gabT ii2二 2灵3 2 2(380 ii82) i0 9.793 7.668 i0 i6.095 i02 2i2 3.i4244.89 i0(48.92(35= 1.663 105(kg.m 2)产3 2I =l ±u l =(1.61处0.017"0 (kg.m)U I0.017 —…U |r ==玄100%= --------- 汇 100%=1% J I 1.619下盘与两圆柱体:gRr2 2gab2 2l x T2 -丨02[(m )21 m )22 m 0)T 2-m °T 0]2[叽 m^ m 0)T 2-m °T 0]4兀 H 012兀 H 02 29 793^7 668^10 工16 095城10 47 08 249 45 2 3=9 心 /. 668 2山 l6.0952 10 [(137 137 1182) C4708)2-1182 (^945)2] 10 12 3.14 44.89 10 35 3542= 6.2587 10 (kg.m )U| - cl 2 2占I 2 2 (齐)2U T 2+(〒)2U O 2丨1 I o ((0 +m °)gabT ^)^(m o gab|比)26兀H o 26 二 2H o (380+1182)><10'3><9.793><7.668"0之叮6.09510~2 48.92迸0.05)2 十6X3.1/X44.89X10工1182 10^ 9.793 7.668 10216.095 10*49.45 0.04 2—:——) 35 3535 35 6 3.142 44.89 102cl2UT 0(m ?1 m ?2 m °)gabT 2、2 /m °gabT 0 、2町%)62H 0(137 137 1182) 10”国9.793 7.668 10^016.095 10,47.08 0.25、2一一35 35 2 _26^3.14 x 44.8^101182 10* 9.793 7.668 10,16.095 10’ 49.45 0.04 2 一一35 352 -26 3.1444.89 10= 6.3074 10*(kg.m 2)结果表示厂_42l x=lx±u. =(6.3±0.6)勺0工(kg.m 2)U |U |xr =』X100% =9%理论公式:3)百分误差的计算a )圆环的转动惯量理论公式: U Ix (b )圆柱的转动惯量理论公式: Im 21 + m 22 X 21 + X 22 \ 2 丄 1 / m 21 + m 22 \ . D 21 + D 22 \ 2l x 理论( )2( )( ) 2 2 2 4= 137 10“ [1 (2.490 10‘)2 (4.5 10‘)2]8= 2.880 10 鼻(kg.m 2)9. 数据分析圆环的相对不确定度波动较小,为1%。
圆柱体的不确定度偏大为 9%。
这个可 能是由两个圆柱体大小质量分布不完全相同、与下圆盘接触有晃动造成数据不 稳定而导致的。
圆环的不确定度可能来自于所放的位置与中心轴有偏差而造成 的。
10. 误差分析其实验值与理论值间的百分误差分别为4.7%和2.1%。
其误差来源可能有以下几种:1. 圆盘没有完全水平;2. 上下圆盘中心点连线不在一条直线上;3. 秒表测量时,起点和终点均目测,不够精确;4. 圆盘在扭动运动中同时有摆动。
5. 下圆盘上三条钢丝与圆盘交点并不构成等边三角形,将导致上下圆盘中心 点连线不在一条直线上此外,根据实验数据计算表明,圆柱体的不确定度较大为9% ,这可能与圆 柱体的分布不完全对程有关。
再者,很可能在扭摆过程中,圆柱体与下盘接触 有松动,导致周期不准确。
I 理论 =2 ml( 2 2D 内 D 外、 )匚 4 4-380 10' (10.0162 15.0102) 10* 8= 1.5467 10」(kg.m 2)1.6193 -1.54671.5467100% =4.7%相对误差:1X - 21理论21理论100% 二6.2587 -2.880 22.880 2100% =8.7%相对误差:11. 实验中现象的分析和处理(1)加待测物体时盘有晃动,加待测物体时轻放轻取,在扭摆前用手致使下盘稳定静止。
(2)摆动一段时间后下圆盘边缘挡光杆偏离光电门,尽量减少振动,包括手离开桌面。
(3)上圆盘与下圆盘一起摆动,尽量把扭摆幅度减小,保持上盘稳定。
12. 结果的分析讨论本实验用三线摆测量物体的转动惯量,其结果在数据处理中已经给出,误差及原因也在前面进行了分析。
通过上述处理和分析得到如下结论:三线摆测物体的转动惯量的方法可靠,其不确定度及误差较小,精确度较高,很好地验证了圆环的转动惯量的理论计算公式和平行轴定理。
本实验有关的圆盘、圆环以及圆柱体的质量及尺寸可采用有关仪器进行精确测量和修正,进一步缩小误差。
弹簧振子振动周期的测量7. 预习思考题回答(1)在测量弹簧的振动周期T时,为什么先要倒着数5、4、3、2、1、0,当数到“时开始计时?如果不这样做,有什么问题?答:以便手的协同性较好,更准确的计时,减小实验的误差8. 数据记录及处理表1劲度系数的测量数据(?m=40g )表对应的数据表格(-1)、数据处理及分析1) 保持质量m=0.060kg,根据做图求出IgC i、a-0.10- -0 12 -0.14- ^0.16- £ '0 16-0 20「- -0 22 - -0 24 - - 26 — 0.600.65 070 0Y5 0.60 0.05 Igk图1 IgT 与Igk 的函数关系曲线图在图中取两点为:P(0.6121,-0.1105),Q(0.8558,-0.2386)可求直线斜率和截距斜率::严沖「O.2386。
1105 一0.5259 x ? 一 X [ 0.8558 - 0.6121截距: lg CX 2M -約2 0.8558汉(91105)-0.612仆(—0.2387) 。
「伯 1 X 2 -为 0.8558 -0.6121因此可求得:C i =1.6270, A =电=j 6?04; =6.2211m 0.06'2) 保持弹簧系数K=5.006N.m -1,根据作图可求出lgC 2,BEqualiqriy s a +Adj, R-Square0 9965ValueStandand ErnorBIntercept 021141 00113 日Slope-0 525870 01557■数据点 —拟俺线0.90igm2 IgT 与Igm函数关系曲线图在图中取两点,坐标为 R (-1.2922 , -0.1914), S (-1.1639 , -0.1303 )则直线斜率:目丿亠=七1303 +0.1914 =04767 x 2 -洛 -1.1639 1.29222.6581>.006"259由以上 A 1 和 A 2 的值可求 A 值为:A 二=6.22116.2003二 6.21072因此弹簧振子的周期公式为:T 二AK :m 、6.21Kq 526m 0.477 (保留三位有效数3) 百分误差:a) A 的百分误差为^^竺"00%*2% b) ,的百分误差为逬严“00%〃2%-0.12SH8■0 14 ・ 数据点 拟飭线-0 15 ---0.16 £-017 -018--0.19^ -0.20 一Equationy = a + b*KAdj. R-Squ@r亚 99802Value Standard E«TDB Interoepl 0 4245 0 0Q96 BSlope0.4767D.007B3-1 32-1.30截距为:IgC 2(-1.1639产(~0.1914)-(一1.2922卜(-0.1303) ° 竺比(-1.1639)-(-1.2922)则可求出C 2=2.6581,A ?唱c) B的百分误差为0.477 -0.5 X100% =4.6%0.59、数据分析通过图解法对实验数据进行了处理,得出了假设方程中A、a、B的值,方法简单可行,与理论值有些偏差,主要来自于较难保证弹簧振动在竖直方向摆动,造成不稳定因素。