机械与人 单元检测
沪科版八年级物理第十章《机械与人》单元测试参考答案
1沪科版八年级物理第十章《机械与人》单元测试(满分 :100分 时间:90分钟)一、单项选择题 (每题3分,共30分)1.下列工具中,属于省力杠杆的是A.瓶盖起子B.定滑轮C.天平D.镊子 2.三峡水库修建水坝,提高水位是为了增加水的A.内能B.重力势能C.弹性势能D.动能 3.下列关于力做功的说法,错误的是A .人提着箱子站在地面不动,手的拉力对箱子没有做功B .人把箱子从二楼提到三楼,手的拉力对箱子没有做功C .汽车在水平公路上匀速行驶,汽车所受重力对汽车有做功D .过山车向下运动过程中,车上乘客所受重力对乘客没有做功4.李明同学快速地由一楼跑到三楼的过程中,他的功率与下列哪个值最接近 A.5W B.50W C.500W D.5000W5.关于机器的功率,下列说法中正确的是A.机器的功率越小,做功越慢B.机器的功率越大,做功越多C.机器的功率越小,机械效率越低D.机器的功率越大,做的有用功越多 6.能用10N 的力提起重20N 物体的简单机械是 A.一个动滑轮 B.一个定滑轮C.杠杆D.一个定滑轮和一个动滑轮组成的滑轮组7.如图1所示是一个指甲刀的示意图,它由三个杠杆ABC 、OBD 和OEF 组成,用指甲刀剪指甲时,下面说法正确的是A.三个杠杆都是省力杠杆B.三个杠杆都是费力杠杆C.ABC 是费力杠杆,OBD 、OEF 是省力杠杆D.ABC 是省力杠杆,OBD 、OEF 是费力杠杆8.初三(l )班《 八荣八耻》 宣传栏中记述着:“某高楼大厦发生高空抛物不文明行为,一老太太被抛下的西瓜皮砸伤… … ”,被抛下的西瓜皮在下落过程中逐渐增大的物理量是 A .重力势能 B .动能 C .重力 D .密度9.五·一假期,小林和爸爸一起去登山,小林用了15min 登到山顶,爸爸用了20min 登上了山顶,爸爸的体重是小林的1.5倍,则小林与爸爸的登山功率之比为A.9∶8B.8∶9C.1∶1D.1∶910. 如图,把不同的实心小铁球放在相同的实验装置的斜面上自由滚下,撞击静止于水平面上的小木块上进行实验.在下列几种情况中,能说明物体的动能与物体的质量有关的是( )A.甲、乙B.甲、丙C.乙、丙D. 丙、丁二、填空题 (每空2分,共18分)11.建立物理模型是物理学研究问题的一种重要方法。
《工业机器人技术基础》习题答案

2. 机器人发展的三个阶段:①示教再现机器人第一代工业机器人是示教再现型。
这类机器人能够按照人类预先示教的轨迹、行为、顺序和速度重复作业。
②感知机器人第二代工业机器人具有环境感知装置,能在一定程度上适应环境的变化。
③智能机器人第三代工业机器人称为智能机器人,具有发现问题,并且能自主的解决问题的能力,尚处于实验研究阶段。
作为发展目标,这类机器人具有多种传感器,不仅可以感知自身的状态,比如所处的位置、自身的故障状况等,而且能够感知外部环境的状态,比如自动发现路况、测出协作机器的相对位置、相互作用的力等。
更为重要的是,能够根据获得的信息,进行逻辑推理、决策判断,在变化的内部状态与变化的外部环境中,自主决定自身的行为。
这类机器人具有高度的适应性和自治能力。
6.SCARA机器人,即Selective Compliance AssemblyRobot Arm,又名水平多关节机器人,是工业机器人应用非常广泛的构型。
SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。
另一个关节是移动关节,用于完成末端件在垂直于平面的运动。
SCARA机器人的特点是负载小、速度快,主要应用在快速分拣、精密装配等3C行业、食品行业等领域。
3.3.液压伺服系统主要由液压源、驱动器、伺服阀、传感器、控制器等组成。
液压传动的特点是转矩与惯量比大,不需要其他动力就能连续维持力。
6.Delta机器人可分为回转驱动型和直线驱动型。
回转驱动型Delta机器人,控制容易、动态特性好,但其作业空间较小、承载能力较低,故多用于高速、轻载的场合。
直线驱动型Delta机器人作业空间大、承载能力强,但其操作和控制性能、运动速度等不及旋转型Delta机器人,多用于并联数控机床等场合。
8.RV减速器的特点:①传动比范围大,传动效率高。
②扭转刚度大。
③在额定转矩下,弹性回差误差小。
④传递同样转矩与功率时,RV减速器较其他减速器体积小。
1. 机器人传感器有多种分类方法,如接触式传感器或非接触式传感器,内传感器或外传感器等。
机器人概论知到章节答案智慧树2023年山东交通学院

机器人概论知到章节测试答案智慧树2023年最新山东交通学院绪论单元测试1.机器人的动作机构具有类似于人或其他生物体某些器官(如肢体、感官等)的功能。
()参考答案:对第一章测试1.科学家们预言:21世纪将是机器人与人和谐共处的时代,机器人产业将成为继汽车、计算机之后的第三个大产业,未来的战争将是一场机器人的战争。
()参考答案:对2.美国原子能委员会的阿尔贡研究所于1947年开发了遥控机械手,1948年又开发了机械式的主从机械手,这就是第一代遥控操作的机器人。
()参考答案:对3.1958年,被誉为“机器人之父”的美国人约瑟夫·恩格尔伯格创建了世界上第一家机器人公司——Unimation,正式把机器人向产业化方向推进。
()参考答案:对4.1920年,捷克斯洛伐克剧作家卡雷尔·凯培克在他的科幻情节剧《罗萨姆的万能机器人》中,第一次提出了()这个名词,被当作机器人的起源。
()。
参考答案:机器人5.人工智能已在机器人学方面进行的一些研究课题可以看出两者的密切关系,例如()。
参考答案:传感器信息处理;自然语言理解;专家系统;机器人规划第二章测试1.超大型机器人指的是负载能力1000 kg以上。
()参考答案:对2.工业机器人可以划分为:加工类、装配搬运类和包装类。
()参考答案:对3.我国沈阳新松机器人自动化股份有限公司于 2015年11月推出了一款包括生理信号检测、语音交互、远程医疗等功能的陪护机器人,它可服务于各类养老院和社区服务站。
()参考答案:对4.我国的()将工业机器人列为产业转型升级和智能制造的重点方向。
()。
参考答案:《中国制造2025》5.按照结构形态,负载能力和动作空间划分可分为:()。
参考答案:中型机器人;大型机器人;小型机器人和超小型机器人;超大型机器人第三章测试1.从20世纪80年代开始,美国国防高级研究计划局(DARPA)专门立项,制定了地面无人作战平台的战略计划,从此,在全世界掀开了全面研究移动机器人的序幕。
《人与机械》 导学案

《人与机械》导学案一、学习目标1、了解机械的发展历程以及对人类社会的影响。
2、探讨人与机械的关系,包括相互依存、相互促进和潜在的冲突。
3、思考在机械高度发展的时代,人类应如何适应并引导其发展,以实现可持续的未来。
二、学习重难点1、重点(1)机械发展的重要阶段和关键技术突破。
(2)人与机械在生产、生活等方面的相互作用。
2、难点(1)分析机械发展对人类社会结构和文化的深层次影响。
(2)探讨人类在机械智能化时代面临的挑战和机遇。
三、知识链接1、工业革命:第一次工业革命以蒸汽机的发明和应用为标志,推动了机械制造业的快速发展;第二次工业革命以电力的广泛应用和内燃机的发明为主要特征,进一步提升了机械的效能和应用范围;第三次工业革命以计算机和信息技术为核心,使机械向自动化、智能化方向迈进。
2、机器人技术:从简单的工业机器人到具备感知、决策和学习能力的智能机器人,机器人在制造业、医疗、服务等领域的应用不断拓展。
四、学习过程(一)机械的发展历程1、古代机械在古代,人类就开始利用简单的机械原理来制造工具和器具,如杠杆、滑轮、斜面等。
这些原始的机械装置帮助人们完成了一些繁重的劳动,提高了生产效率。
例如,古埃及人利用滑轮系统建造金字塔,中国古代发明的水车用于灌溉农田。
2、工业革命与机械制造工业革命是机械发展的重要转折点。
蒸汽机的出现使得机械动力取代了人力和畜力,工厂生产得以大规模开展。
纺纱机、织布机等机械设备的发明改变了纺织业的生产方式,提高了产量和质量。
随着钢铁工业的发展,机械的制造材料和工艺得到改进,更加复杂和精密的机械逐渐涌现。
3、现代机械与自动化20 世纪以来,机械逐渐走向自动化和智能化。
数控机床、自动化生产线等设备的出现大大提高了生产的精度和效率。
在汽车制造、电子工业等领域,自动化生产已经成为主流。
同时,机器人技术的发展使得机械能够完成更加复杂和危险的任务。
(二)人与机械的相互依存1、机械对人类的帮助机械在各个领域为人类提供了巨大的帮助。
NACHI机器人说明书
摘要 NACHI的SH200-01机器人常见故障的原因和处理方法,SH200-01机器人的结构和控制原理。
关键词 NACHI机器人伺服单元编码器 AW控制器1 概述在制造业中诞生的工业机器人是继动力机、计算机之后而出现的全面延伸人的体力和智力的新一代生产工具。
机器人是一种具有高度柔性的自动化装备,对提高制造生产线的柔性具有特别重要的意义,它作为现代制造业的主要自动化装备在制造业中广泛应用,并将在未来的制造企业中扮演越来越重要的角色。
伴随着工业机器人在制造业应用,如何维修机器人,保证机器人的使用效率,成为影响机器人应用的技术问题,现以日本NACHI公司的SH200型机器人为例,介绍有关机器人常见故障的原因及处理方法。
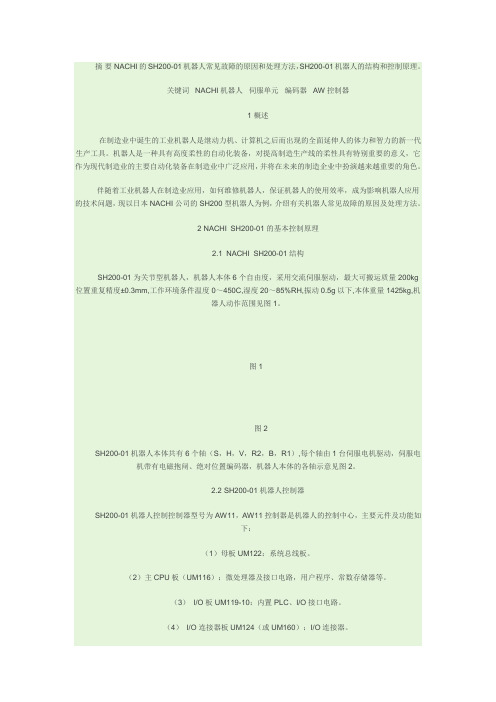
2 NACHI SH200-01的基本控制原理2.1 NACHI SH200-01结构SH200-01为关节型机器人,机器人本体6个自由度,采用交流伺服驱动,最大可搬运质量200kg 位置重复精度±0.3mm,工作环境条件温度0~450C,湿度20~85%RH,振动0.5g以下,本体重量1425kg,机器人动作范围见图1。
图1图2SH200-01机器人本体共有6个轴(S,H,V,R2,B,R1),每个轴由1台伺服电机驱动,伺服电机带有电磁抱闸、绝对位置编码器,机器人本体的各轴示意见图2。
2.2 SH200-01机器人控制器SH200-01机器人控制控制器型号为AW11,AW11控制器是机器人的控制中心,主要元件及功能如下:(1)母板UM122:系统总线板。
(2)主CPU板(UM116):微处理器及接口电路,用户程序、常数存储器等。
(3)I/O板UM119-10:内置PLC、I/O接口电路。
(4)I/O连接器板UM124(或UM160):I/O连接器。
(5)伺服单元:RFX1121(8轴带行走轴、工具轴);RFX1120(7轴带工具轴);由UM200、UM2 01、UM202、UM203构成,其中UM203为电机驱动和再生放电回路,UM202主驱动控制、伺服异常检测和控制电源,UM201制动、内部顺序控制;UM200为伺服单元的CPU板,与控制器CPU通信,与编码器通信及主控制。
第十章 机械与人 学习效果检测(解析版)

沪科八《第十章机械与人》学习效果检测(解析版)(满分100分,时间60min)一、选择题(每小题3分,共39分)1.(2021贵州中考)下列说法正确的是()A.使用杠杆一定可以省力B.钢丝钳是费力杠杆C.定滑轮是等臂杠杆,可以改变力的方向D.滑轮组既可以省力也可以省功【答案】C【解析】使用杠杆时,若动力臂小于阻力臂,例如镊子,费力但省距离,故A错误;钢丝钳的动力臂大于阻力臂,所以钢丝钳是省力杠杆,故B错误;定滑轮实质是等臂杠杆,使用定滑轮不能省力,但能改变力的方向,故C正确;滑轮组既可以省力不能省功,故D错误。
故选C。
2.(2021广西梧州中考)如图所示的工具中,使用时属于费力杠杆的是()A.开瓶器开瓶盖B.筷子夹食物C.定滑轮提升物体D.天平称物体质量【答案】B【解析】起子在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不符合题意;筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,故B符合题意;定滑轮实质是动力臂等于阻力臂的杠杆,是等臂杠杆,故C不符合题意;天平的动力臂等于阻力臂,是等臂杠杆,故D不符合题意。
故选B。
3.(2021湖南岳阳中考)A中的杠杆和物体处于静止状态,B、C、D中的物体被匀速吊起,所有物体重力均为G,不计动滑轮重力、绳重和一切摩擦,则所用拉力F最小的是()A .B .C .D .【答案】D 【解析】根据杠杆的平衡条件1122Fl F l =可知杠杆平衡时12F G ⨯=⨯,故拉力A =2F G ;图B 中为定滑轮提升物体,不能省力,只能改变力的方向,绳端拉力B =F G ;图C 中使用滑轮组提升物体,动滑轮上有2段绳子承载,自由端拉力C 12F G =;图D 中使用滑轮组提升物体,动滑轮上有3段绳子承载,自由端拉力D 13F G =;其中D 图中自由端拉力最小。
故选D 。
4.(2021湖南衡阳中考)如图所示,是我国古代《墨经》最早记述了秤的杠杆原理,有关它的说法正确的是( )A .“标”“本”表示力,“权”“重”表示力臂B .图中的B 点为杠杆的支点C .“权”小于“重”时,A 端一定上扬D .增大“重”时,应把“权”向A 端移 【答案】D 【解析】“标”“本”表示力臂,“权”“重”表示力,故A 错误;杠杆绕着O 转动,故O 为支点,故B 错误;“权”小于“重”时,A 端可能上扬,因为杠杆平衡原理可知,平衡不仅与力有关还与力臂有关,故C 错误;增大“重”时,重与OB 的乘积变大,在权不变的情况下可以增大标,故应把“权”向A 端移,故D 正确。
2022年沪科版八年级全册物理第十章机械与人单元测试卷(解析版)

2022年沪科新版八上物理《机械与人》单元测试卷一.选择题(共10小题)1.用下列简单机械匀速提升同一个物体(不计机械自重和摩擦),其中所需动力最小的是()A .B .C .D .2.下列关于杠杆五个名词的说法中,正确的是()A .力臂一定在杠杆上B .作用在杠杆上的动力、阻力方向一定相反C .力臂是支点到力的作用点的距离D .力的作用线通过支点其力臂为0。
3.如图所示,O 为杠杆的支点,第一次杠杆在重物G 和力F 1的作用下处于水平位置平衡。
如果第二次杠杆在重物G 和力F 2的作用下仍在图中位置保持平衡,下面关系中正确的是()A .F 2>F 1>GB .F 1=F 2=GC .F 1<F 2=G D .F 1>F 2=G4.如图这些常见的器具都应用了杠杆,下列属于省距离杠杆的是()A.动滑轮B.订书机C.羊角锤D.镊子5.用如图所示的均匀杠杆提升重物,已知OA=OB,设作用在A端的力F始终竖直向下,在将重物慢慢匀速提升到一定高度的过程中,判断正确的是()A.F的大小将保持不变B.F的大小先变大,后变小C.该杠杆是省力杠杆D.若将拉力F换成重物G,不可能在如图所示位置平衡6.下列说法正确的是()A.做功多的机械,机械效率一定高B.机械工作时功率越大,其工作时一定越省力C.有力对物体做功时,机械能可以保持不变D.被运动员投出去的篮球在空中运动过程中,运动员对篮球做了功7.如图所示的四种情景中,力做功的是()A.搬而未动的石头 B.举着杠铃不动C.叉车将货物提高 D.水平匀速移动的重物8.体重相同的李明和张东从一楼爬到三楼,他们同时出发,李明先到,张东后到。
此过程中()A.李明做功较多B.张东做功较多C.张东的功率大D.李明的功率大9.下列说法中正确的是()A.功率大的机械比功率小的机械做功快B.做功时间越长,机械功率越大C.机械做功越快,机械效率越高D.做功越多机械效率越高10.甲乙两个机械,甲机械的效率是70%,乙机械的效率是50%,则()A.使用甲机械做功省力B.使用乙机械做功多C.使用甲机械做功快D.以上说法都不对二.多选题(共5小题)11.如图所示,小华用滑轮组匀速提升一个重为600N的物体,物体上升的速度为0.1m/s,人拉绳的力F为250N,不计绳重和摩擦,下列说法正确的是()A.动滑轮重150NB.人拉绳做功的功率为25WC.若小华的体重为750N,则小华用这套装置提的最大物重为2100ND.若用这个滑轮组提升1200N的物体时,滑轮组的机械效率为% 12.如图所示,在轻质杠杆两端各挂体积相同的实心铁块和铜块,杠杆在水平位置保持不变。
第2章机器人机械系统2概要

大臂 机身
基座
小臂
腕部
连接手部
第二页,编辑于星期二:二十三点 二十三分。
回转与升降机身
回转运动在 下,升降运 动在上
(a)单杆活塞气缸
(b)双杆活塞气缸
链条链轮传动实现机身回转的原理图
第三页,编辑于星期二:二十三点 二十三分。
回转与俯仰机身
第四页,编辑于星期二:二十三点 二十三分。
机身设计时要注意下列问题
第十五页,编辑于星期二:二十三点 二十三分。
ABB的IRB4400
ABB的IRB 4600
采用优化设计,开链结构
第十六页,编辑于星期二:二十三点 二十三分。
机器人机械结构设计的发展方向
采用有限元、模态分析和仿真设计等现代设计方法; 采用新的高强度轻质材料,进一步提高机器人结构的负载/自重比, 使机器人机构进一步紧凑,速度和范围指标进一步提高;
动部分的质量;②使臂部的重心与立柱中心尽量靠近;③采取“配重” 的方法来减小和消除偏重力矩。
➢ 运动要平稳、定位精度要高。影响因素:①惯性冲击的
影响;②定位方法的影响;③结构刚性的影响;④控制及驱动 系统的影响等。
第七页,编辑于星期二:二十三点 二十三分。
平衡机器人手臂的重力矩优点如下:
如果是喷漆机器人,则便于人工手把手示教。
Euler腕关节的特色在于给定第四轴和第五轴一定角度后(J4,J5),可将安装腕关节上 之手指向任意方向,再给定第六轴角度可调整手的姿态,如Fig- 所示。
第二十二页,编辑于星期二:二十三点 二十三 分。
經由特殊設定,可進一步將Owc_s 與Owc 點重合(Fig-8)。如此,Fig-8 便形成理
臂部的作用是引导手指准确地抓住工件,并运送到所需要的位 置上。 在运动时,直接承受腕部、手部和工件(或工具)的静、动载荷, 尤其高速运动时,将产生较大的惯性力(或惯性力矩),引起冲 击,影响定位的准确性。
2017-2018学年八年级物理沪科版下册单元测试题第10章机械与人
B.使用动滑轮可以省力,但不能改变力的方向
C.使用杠杆,就是为了省力
D.使用定滑轮不省力,但可以省距离
9. 用一重锤从相同的高度落下分别敲击质量和温度都相同的钢块和铅块,重锤打在钢块上时,重锤会跳起,打在铅块上时,重锤没有弹起(c铅<c钢),这时()
A.钢块的温度比铅块高 B.铅块的温度比钢块高
6. 为了安全,学校准备将放在墙边上的几块楼板再向墙边移移,最好选取下列各种简单机械中的 ( )
A.杠杆 B.定滑轮 C.动滑轮 D.滑轮组
7. 下列关于简单机械的理解,正确的是( )
A.使用动滑轮不一定省力B.吃饭时,筷子是个省力杠杆
C.使用杠杆,就是为了省力 D.使用定滑轮不省力,但可以省距离
8. 下列关于简单机械的理解,正确的是( )
1)实验前,将杠杆中点置于支架上,当杠杆静止时,发现杠杆右端下沉.此时,应把杠杆两端的平衡螺母向_______________(选填“左”或“右”)调节,使杠杆在不挂钩码时,保持_______________并静止,达到平衡状态.这样做的好处是:便于在杠杆上直接测量_______________ .
1)王师傅自由站在水平地面时,对地面的压强
2)滑轮下未挂重物时,王师傅所用的力F1
3)滑轮下所挂重物G的重力.
28.如图所示为小刚设计的滑轮组装置.其中滑块A置于表面粗糙程度各处相同的水平面上,动滑轮重G=10N,重物B的重力GB可改变.下表是小刚在某次使用该装置时记录的一些数据.若不计绳重及绳与滑轮间的摩擦,跨过滑轮的绳或竖直或水平,A距水平面上的定滑轮、B距水平面均足够远.求:
C. 起钉子的羊角锤 D. 筷子
12. 下列说法中正确的是( )
A.支点到力的作用点的距离称为力臂.
沪科版八年级物理《第十章:机械与人》单元评价及答案
沪科版八年级物理《第十章机械与人》单元评价检测精练精析(45分钟 100分)一、选择题(本大题共8小题,每小题5分,共40分)1.用下列简单机械,使重量同为G的物体都处于静止状态,不计摩擦、机械自重及绳的重量,其中用力最小的是( )2.(2018·烟台中考)在你学过的简单机械里既可以省力又可费力的机械是( ) A.杠杆B.定滑轮C.动滑轮D.滑轮组3.(2018·绥化中考)如图所示,下列简单机械中,省距离的是( )4.如图所示,不考虑绳子与滑轮之间的摩擦,人通过定滑轮拉住重为98 N的物体,当人拉绳子从A点慢慢移动到B点时,人对绳子的拉力和拉力所做的功为( )A.拉力逐渐增大,拉力所做的功为98 JB.拉力的大小不变,拉力所做的功为98 JC.拉力的大小不变,拉力所做的功为294 JD.拉力的大小不变,拉力所做的功为392 J5.(2018·武汉中考)航模小组的某位同学在操场上利用如图所示的电动遥控直升飞机进行训练,他操作遥控器,使重为3 N的飞机从水平地面由静止开始竖直上升,飞机先后经历加速、匀速、减速三个阶段,然后悬停在距离地面10 m 的高度处,飞机竖直上升的总时间为12 s,匀速上升阶段的速度为1 m/s。
假设飞机在空中的受力情况可以简化为仅受到重力和竖直向上的升力,则下列说法正确的是( )A.在离开地面的过程中飞机对地面的压力先增大后减小B.在上升阶段飞机受到的升力大于重力C.在上升阶段飞机升力的功率为2.5 WD.在悬停阶段飞机升力的功率为3 W6.如图是由相同的滑轮组装的滑轮组,甲乙两人分别用两装置在相等时间内将质量相等的重物匀速提升相同的高度,空气阻力、摩擦、滑轮和绳子的质量均不计,下列说法正确的是( )A.甲的拉力是乙的拉力的3倍B.乙拉绳子的速度大小是甲拉绳子速度大小的2倍C.甲拉力的功率大于乙拉力的功率D.如果考虑滑轮质量,左图装置的机械效率比右图的小7.(2018·广州中考)如图所示的剪刀剪纸机械效率为80%,这表示( )A.若作用在剪刀上的动力是1 N,则阻力是0.8 NB.若作用在剪刀上的阻力是1 N,则动力是0.8 NC.若作用在剪刀上的动力做功1 J,则有0.2 J的功用于剪纸D.若作用在剪刀上的动力做功1 J,则有0.8 J的功用于剪纸8.跳远运动的几个阶段如图所示,则运动员( )A.助跑阶段机械能不变B.起跳时机械能为零C.经过最高点时动能最大D.经过最高点时重力势能最大二、填空题(本大题共6小题,每空2分,共28分)9.(2018·连云港中考)如图是生活中常见的杠杆,其中属于省力杠杆的是_____(填写字母符号),其中属于费力杠杆的是_________(填写字母符号)。
工业机器人的基本组成与技术参数
55°至205°
280(°)/s
Axis4 手腕 Axis5 弯曲
230°至230° 120°至125°
560(°)/s 420(°)/s
Axis6 翻转
400°至400°
750(°)/s
工业机器人基础
人机交互系统是使操作人员参与机器人控制并与机器人进行联系的装置,如计算机的标 准终端、信息显示板、指令控制台、危险信号报警器等。该系统归纳起来可分为指令给定 装置和信息显示装置两大类。
2)控制系统
通过对工业机器人驱动系统的控制,使执行机构按照规定的要求进行工 作。工业机器人的控制系统一般由控制计算机和伺服控制器组成。控制计算 机不仅发出指令,协调各关节驱动之间的运动,同时要完成编程示教及再现, 在其他环境状态(传感器信息)、工艺要求、外部相关设备(如电焊机)之 间传递信息和协调工作。伺服控制器控制各个关节的驱动器,使各杆按一定 的速度、加速度和位置要求进行运动。
(2)说明书上提供的工作范围往往要小于运动学意义上的最大空间。
(3)实际应用中的工业机器人还可能由于受到机械结构的限制,在工 作范围的内部也存在着臂端不能到达的区域,这类区域称为空洞或空腔。
2.自由度
自由度是指机器人操作机在空间运动所需的变量数,用以表示机器人动作灵活 程度的参数,一般是以沿轴线移动和绕轴线转动的独立运动的数目来表示。
4.运动速度
运动速度影响工业机器人的工作效率和运动周期,它与工业机器人所提取的重力和位 置精度均有密切的关系。运动速度提高,工业机器人所承受的动载荷会增大,所承受的 加减速时的惯性力也会增大,这会影响工业机器人的工作平稳性和位置精度。以目前的 技术水平而言,一般工业机器人的最大直线运动速度大多在1 000 mm/s以下,最大回转速 度一般不超过120(°)/s。
机器人传感器PPT课件

1.导电橡胶;2.金属; 12.衬底; 13.引线
05:20
第11页/共30页
人工皮肤触觉传感器的研究重点
1. 选择更为合适的敏感材料,现有的材料主要有 导电橡胶、压电材料、光纤等;
2. 将集成电路工艺应用到传感器的设计和制造中, 使传感器和处理电路一体化,得到大规模或超 大规模阵列式触觉传感器。
05:20
第28页/共30页
小结
• 概念:机器人传感器 • 问题1:简要说明机器人传感器研究历史
05:20
第29页/共30页
谢谢您的观看!
05:20
第30页/共30页
目录
• 概述 • 触觉传感器 • 接近觉传感器 • 视觉传感器 • 听觉、嗅觉、味觉及其他传感器 小结
05:20
第1页/共30页
概述
• 机器人与传感器 • 机器人传感器分类
05:20
第2页/共30页
机器人与传感器
• 机器人及机器人传感器的定义 • 机器人的发展历史
05:20
第3页/共30页
机器人及机器人传感器的定义
图像处理
景像描述
05:听觉:具有接近人耳的功能还相差很远; • 嗅觉:主要检测空气中的化学成分、浓度、等功能,主要采用气体传感器及射线传感器等。 • 味觉:对液体进行化学成分的分析。衫的味觉方法有pH计、化学分析器等。 • 其他传感器:如纯工程学的传感器,象磁传感器、安全用传感器和电波传感器等
PVF2 阵 列 式触觉传 感器
05:20
第12页/共30页
触觉传感器的工作重点
• 触觉传感器的工作重点集中在阵列式触觉传感器信号的处理上,目的是辨识接触 物体的形状。
• 这种信号的处理涉及到信号处理、图像处理、计算机图形学、人工智能、模式识 别等学科,是一门比较复杂、比较困难的技术,还很不成熟,有等于进一步研究 和发展。
民用机器人的标准
民用机器人的标准•GB/T 41527-2022家用和类似用途服务机器人安全通用要求•GB/Z 41046-2021上肢康复训练机器人要求和试验方法•GB/T 36239-2018特种机器人术语•GB/T 35089-2018机器人用精密齿轮传动装置试验方法•GB/T 26153.3-2015离线编程式机器人柔性加工系统第3部分:喷涂系统•GB/T 32197-2015机器人控制器开放式通信接口规范•GB/T 30819-2014机器人用谐波齿轮减速器•GB 11291.2-2013机器人与机器人装备工业机器人的安全要求第2部分:机器人系统与集成•GB/T 12643-2013机器人与机器人装备词汇•GB/T 29825-2013机器人通信总线协议•GB/T 29824-2013工业机器人用户编程指令•GB/T 12642-2013工业机器人性能规范及其试验方法•GB 11291.1-2011工业环境用机器人安全要求第1部分:机器人•GB/T 26153.2-2010离线编程式机器人柔性加工系统第2部分:砂带磨削加工系统•GB/T 26154-2010装配机器人.通用技术条件•GB/T 26153.1-2010离线编程式机器人柔性加工系统第1部分:通用要求•GB/T 21412.8-2010石油天然气工业水下生产系统的设计和操作第8部分:水下生产系统的水下机器人(ROV)接口•GB/T 14283-2008点焊机器人.通用技术条件。
•GB/T 20868-2007工业机器人性能试验实施规范•GB/Z 20869-2007工业机器人.用于机器人的中间代码•GB/T 20867-2007工业机器人安全实施规范•GB/T 20723-2006弧焊机器人通用技术条件•GB/T 20722-2006激光加工机器人通用技术条件•GB/T 14468.2-2006工业机器人.机械接口.第2部分;轴类•GB/T 14468.1-2006工业机器人.机械接口.第1部分;板类•GB/T 16977-2005工业机器人坐标系和运动命名原则•GB/T 19400-2003工业机器人抓握型夹持器物体搬运词汇和特性表示•GB/T 19399-2003工业机器人编程和操作图形用户接口•GB/Z 19397-2003工业机器人电磁兼容性试验方法和性能评估准则指南•GB/T 12644-2001工业机器人特性表示•GB/T 12642-2001工业机器人性能规范及其试验方法•GB/T 14468.2-1999工业机器人轴形机械接口•GB/T 17887-1999工业机器人末端执行器自动更换系统词汇和特性表示•GB 11291-1997工业机器人安全规范•GB/T 16977-1997工业机器人坐标系和运动命名原则•GB/T 12643-1997工业机器人词汇•GB/T 16720.3-1996工业自动化系统制造报文规范第3部分;机器人伴同标准•GB/T 14468.1-1993工业机器人圆形机械接口•GB/T 14283-1993点焊机器人通用技术条件•GB/T 14284-1993工业机器人通用技术条件•GB/T 26326.2-2010离线编程式机器人柔性加工系统第2部分:砂带磨削加工系统国家市场监督管理总局、中国国家标准化管理委员会,关于民用机器人的标准•GB/T 41431-2022家用和类似用途服务机器人术语和分类•GB/T 41433-2022家用和类似用途服务机器人消费者指导•GB/T 41402-2022物流机器人信息系统通用技术规范•GB/T 41393-2022娱乐机器人安全要求及测试方法•GB/T 41256-2022机器人制造数字化车间装备互联互通和互操作规范•GB/T 41264-2022板料折弯机器人安全要求•GB/T 40574-2021大型工业承压设备检测机器人通用技术条件•GB/T 40575-2021工业机器人能效评估导则•GB/T 40576-2021工业机器人运行效率评价方法•GB/T 40327-2021轮式移动机器人导引运动性能测试方法•GB/T 40229-2021家用移动机器人性能评估方法•GB/T 40013-2021服务机器人电气安全要求及测试方法•GB/T 40014-2021双臂工业机器人性能及其试验方法•GB/T 39785-2021服务机器人机械安全评估与测试方法•GB/T 39590.1-2020机器人可靠性第1部分:通用导则•GB/T 39561.5-2020数控装备互联互通及互操作第5部分:工业机器人对象字典•GB/T 39561.7-2020数控装备互联互通及互操作第7部分:工业机器人测试与评价•GB/T 39586-2020电力机器人术语•GB/T 39633-2020协作机器人用一体式伺服电动机系统通用规范•GB/T 39407-2020研磨抛光机器人系统通用技术条件•GB/T 39360-2020工业机器人控制系统性能评估与测试•GB/T 39405-2020机器人分类•GB/T 39408-2020电子喷胶机器人系统通用技术条件•GB/T 39463-2020工业机器人电气设备及系统通用技术条件•GB/T 39266-2020工业机器人机械环境可靠性要求和测试方法•GB/T 39406-2020工业机器人可编程控制器软件开发平台程序的XML交互规范•GB/T 39478-2020停车服务移动机器人通用技术条件•GB/T 39402-2020面向人机协作的工业机器人设计规范•GB/T 39404-2020工业机器人控制单元的信息安全通用要求•GB/T 39134-2020机床工业机器人数控系统编程语言•GB/T 39005-2020工业机器人视觉集成系统通用技术要求•GB/T 39007-2020基于可编程控制器的工业机器人运动控制规范•GB/T 39004-2020工业机器人电磁兼容设计规范•GB/T 39006-2020工业机器人特殊气候环境可靠性要求和测试方法•GB/T 38870-2020切割机器人系统通用技术条件•GB/T 38871-2020工业环境用移动操作臂复合机器人通用技术条件•GB/T 38872-2020工业机器人与生产环境通信架构•GB/T 38890-2020三自由度并联机器人通用技术条件•GB/T 38873-2020分拣机器人通用技术条件•GB/T 38839-2020工业机器人柔性控制通用技术要求•GB/T 38834.1-2020机器人服务机器人性能规范及其试验方法第1部分:轮式机器人运动•GB/T 5226.7-2020机械电气安全机械电气设备第7部分:工业机器人技术条件•GB/T 38835-2020工业机器人生命周期对环境影响评价方法•GB/T 37414.2-2020工业机器人电气设备及系统第2部分:交流伺服驱动装置技术条件•GB/T 38642-2020工业机器人生命周期风险评价方法•GB/T 37414.3-2020工业机器人电气设备及系统第3部分:交流伺服电动机技术条件•GB/T 38336-2019工业、科学和医疗机器人电磁兼容发射测试方法和限值•GB/T 38326-2019工业、科学和医疗机器人电磁兼容抗扰度试验•GB/T 38260-2019服务机器人功能安全评估•GB/T 38244-2019机器人安全总则•GB/T 38124-2019服务机器人性能测试方法•GB/T 37703-2019地面废墟搜救机器人通用技术条件•GB/T 37703-2019地面废墟搜救机器人通用技术条件•GB/T 37704-2019运动康复训练机器人通用技术条件•GB/T 37414.1-2019工业机器人电气设备及系统第1部分:控制装置技术条件•GB/T 37718-2019机器人用精密行星摆线减速器•GB/T 37392-2019冲压机器人通用技术条件•GB/T 37415-2019桁架式机器人通用技术条件•GB/T 16977-2019机器人与机器人装备坐标系和运动命名原则•GB/T 37394-2019锻造机器人通用技术条件•GB/T 37416-2019洁净机器人通用技术条件•GB/T 37395-2019送餐服务机器人通用技术条件•GB/T 37284-2019服务机器人电磁兼容通用标准发射要求和限值•GB/T 37283-2019服务机器人电磁兼容通用标准抗扰度要求和限值•GB/T 37165-2018机器人用精密摆线针轮减速器•GB/T 37242-2018机器人噪声试验方法•GB/T 36896.1-2018轻型有缆遥控水下机器人第1部分:总则•GB/T 36896.3-2018轻型有缆遥控水下机器人第3部分:导管螺旋桨推进器•GB/T 36896.2-2018轻型有缆遥控水下机器人第2部分:机械手与液压系统•GB/T 36896.4-2018轻型有缆遥控水下机器人第4部分:摄像、照明与云台•GB/T 36491-2018机器人用摆线针轮行星齿轮传动装置通用技术条件•GB/T 36530-2018机器人与机器人装备个人助理机器人的安全要求•GB/T 36321-2018特种机器人分类、符号、标志•GB/T 36239-2018特种机器人术语•GB/T 35089-2018机器人用精密齿轮传动装置试验方法未注明发布机构,关于民用机器人的标准•GB/T 38560-2020工业机器人的通用驱动模块接口中华人民共和国国家质量监督检验检疫总局、中国国家标准化管理委员会,关于民用机器人的标准•GB/T 36013-2018锄草机器人安全要求•GB/T 36007-2018锄草机器人通用技术条件•GB/T 36008-2018机器人与机器人装备协作机器人•GB/T 36012-2018锄草机器人性能规范及其试验方法•GB/T 35116-2017机器人设计平台系统集成体系结构•GB/T 35144-2017机器人机构的模块化功能构件规范•GB/T 35144-2017机器人机构的模块化功能构件规范•GB/T 35144-2017机器人机构的模块化功能构件规范•GB/T 35127-2017机器人设计平台集成数据交换规范•GB/T 34884-2017滚动轴承工业机器人谐波齿轮减速器用柔性轴承•GB/T 34897-2017滚动轴承工业机器人RV减速器用精密轴承•GB/T 34454-2017家用干式清洁机器人性能测试方法•GB/T 34038-2017码垛机器人通用技术条件•GB/T 33263-2016机器人软件功能组件设计规范•GB/T 33261-2016服务机器人模块化设计总则•GB/T 33266-2016模块化机器人高速通用通信总线性能•GB/T 33265-2016教育机器人安全要求•GB/T 33267-2016机器人仿真开发环境接口•GB/T 33262-2016工业机器人模块化设计规范•GB/T 33264-2016面向多核处理器的机器人实时操作系统应用框架中国团体标准,关于民用机器人的标准•T/CASME 197-2022直角坐标型机器人•T/JCBD 16-2022 "吉致吉品"智能家教机器人•T/JCBD 17-2022 "吉致吉品"智能点餐机器人•T/QDAS 101-2022消防排烟灭火机器人•T/NSSQ 003-2022基于5G网络的医疗机器人的控制规范•T/NXJX 039-2022机器人去毛刺单元通用技术规范•T/GDID 1063-2022塑料浴缸用切割开孔机器人系统•T/GDID 1062-2022手把手示教喷涂机器人系统•T/ZSRA 001-2022特种巡逻机器人通用技术要求•T/CSES 74-2022废玻璃机器人智能分拣工艺标准•T/GRIA 002-2022工业应用移动机器人术语•T/SHMHZQ 114-2022智能柔性机器人•T/CASME 50-2022智能制造机器人工程专业人才培养指南•T/GDC 190-2022架空输电线路导(地)线预绞丝修补机器人作业规范•T/GDC 189-2022架空输电线路导(地)线预绞丝修补机器人技术规范•T/TIIMDSC 1-2022小型汽车驾驶员培训机器人教练及场地•T/CASMES 130-2022腰部有源助力外骨骼机器人•T/QGCML 389-2022机器人机床自动上下料技术规程•T/ZSA 118-2022超高压水射流除锈机器人技术规范•T/CQAM 001-2022柑橘采摘机器人•T/CQAM 002-2022柑橘采摘机器人作业规程•T/GDMES 0033-2022机器人一体化关节性能规范及试验方法•T/CAS 639-2022家用清洁机器人安装及管理服务规范•T/SPEMF 0037-2022智能扫地(清洁)机器人•T/ZPP 007-2022机器人流程自动化软件信息安全管理规范•T/CASMES 76-2022化纤喷丝板板面清洗机器人•T/CEEIA 593-2022工业机器人耐久性测试方法•T/CEEIA 602.6-2022机器人智能化评价第6部分:运动性能•T/CEEIA 602.5-2022机器人智能化评价第5部分轨迹自适应•T/CEEIA 600-2022教育机器人技术规范•T/CEEIA 602.1-2022机器人智能化评价第1部分:智能化信息模型和等级评价程序•T/CEEIA 601-2022智能中餐机器人系统通用技术条件•T/CEEIA 602.4-2022机器人智能化评价第4部分:听觉•T/CEEIA 602.2-2022机器人智能化评价第2部分:操作交互性•T/CEEIA 602.3-2022机器人智能化评价第3部分:视觉•T/CCIAC 004-2022电石出炉机器人安全要求•T/CI 038-2022民用飞机蒙皮激光脱漆机器人系统及质量评估规范•T/CAS 615-2022家用清洁机器人基站自动上下水装置安装规范•T/CEEIA 596-2022商业环境地面清洁服务机器人技术规范•T/CEEIA 595-2022机器人精密减速器温度适应性要求和测试方法•T/CEEIA 592.1-2022餐娱行业用智能递送服务机器人第1部分:通用条件•T/CEEIA 594-2022工业环境用巡检复合操作机器人(轮式)系统技术规范•T/CEEIA 592.3-2022餐娱行业用智能递送服务机器人第3 部分:酒店递送机器人(轮式)特殊要求•T/CEEIA 592.2-2022餐娱行业用智能递送服务机器人第2 部分:KTV 递送机器人(轮式)特殊要求•T/GDC 165-2022高空幕墙清洗机器人•T/MMAC 008-2022自动布料机器人•T/CIPR 0017-2022用于隧道消防的机器人及其自动供料机构•T/SSITS 503-2022工业应用移动机器人复合机器人技术规范•T/ZZB 2692-2022消防排烟机器人•T/CEEIA 566-2022机器人安全系统编码规则(C++)•T/CEEIA 564-2022机器人移动算法性能测评要求•T/CEEIA 365-2022机器人目标检测算法测评要求•T/ZSTDA 08-2022工业机器人用外消隙齿轮传动装置•T/ZSTDA 07-2022六轴工业机器人关节传动装置•T/CASMES 9-2022下肢康复训练机器人•T/CWAN 0020-2022机器人焊接技能竞赛•T/ZSTDA 06-2022工业机器人刚性和柔性谐波齿轮加工工艺•T/CAMA 51-2021连栋温室茄果类果蔬采摘机器人•T/CAMA 53-2021连栋温室喷雾机器人•T/CAMA 54-2021连栋温室巡检机器人•T/CAMA 52-2021连栋温室运输机器人•T/SZROBOT 0001-2021深圳市机器人协会团体标准《商用清洁机器人通用技术规范》•T/ZHUSA 001-2021水面智能救生机器人•T/ZSA 88-2021煤炭智能机器人制样系统通用技术要求•T/CEEIA 556-2021机器人控制部件可靠性强化试验方法•T/CEEIA 557-2021食品领域机器人系统安全要求及测试方法•T/CEEIA 555-2021移动机器人振动与冲击试验条件确定方法•T/CEEIA 558-2021工业机器人可靠性测试与评定•T/SMA 0022-2021康复训练机器人电磁兼容性要求和试验方法•T/SSITS 802-2021工业应用移动机器人传导式充电装置技术规范•T/SSITS 801-2021工业应用移动机器人锂离子蓄电池技术规范•T/SDWCIA 0002-2021 “领跑者”标准评价要求机器人柔性电缆•T/SSITS 502-2021物流分拣用移动机器人技术规范•T/SSITS 501-2021汽车生产线用移动机器人技术规范•T/ZAITS 10502-2021面向服务机器人智能云平台通用要求•T/SHMHZQ 110-2021冰淇淋机器人技术规程•T/CWAN 0035-2021机器人型钢切割生产线•T/PDZL 001-2021机器人谷质量基础设施“一站式”服务规范•T/CWAN 0035-2021机器人型钢切割生产线•T/CIE 124-2021工业机器人故障诊断与预测性维护第4部分:健康状态评估•T/CIE 123-2021工业机器人故障诊断与预测性维护第3部分:故障诊断•T/CIE 125-2021工业机器人故障诊断与预测性维护第5部分:预测性维护•T/CIE 122-2021工业机器人故障诊断和预测性维护第2部分:在线监测•T/RSAI 001-2021智能安防机器人•T/GDMES 0027.1-2021工业机器人双旋机器人通用技术规范•T/GQDA 00005-2021机器人控制器加速试验与可靠性指标验证方法•T/GDFSS 0005-2021机器人餐厅食品安全全链条管控实施规范•T/ZZB 2602-2021轨道式光伏组件智能清洁机器人•T/HBAS 020-2021导线绝缘层涂覆机器人系统通用技术条件•T/CSTE 0086-2021 ”领跑者”标准评价要求机器人柔性电缆•T/DGWCA 0006-2021 “领跑者”标准评价要求机器人柔性电缆•T/JSQA 109-2021智能机器人关节用摆线精密减速器•T/ZZB 2579-2021机器人用谐波齿轮减速器•T/WJZZ 008-2021机械加工用线性机器人技术规范•T/GDEIIA 3-2020工业机器人可靠性通用要求•T/GDEIIA 4-2020工业机器人可靠性指标评价方法•T/CAQI 217-2021家用洗衣机器人•T/ZZB 2365-2021配电房轮式巡检机器人•T/ZZB 2362-2021家用清洁机器人•T/HEBQIA 037-2021全钢轮胎生产用桁架式机器人•T/CRSS 0003-2021机器人用减速器质量过程控制体系要求•T/CRSS 0001-2021机器人用谐波减速器通用技术条件•T/CRSS 0002-2021机器人用RV减速器通用技术条件•T/CSM 21-2021镁铝合金铸锭码垛机器人系统通用技术条件•T/SZAF 001-2021多用途轻型水下作业机器人•T/PTZZ 0002-2021机器人焊接生产线•T/CAS 506-2021烹饪机器人智能水平评价技术规范•T/JYBZ 014-2021中小学教学机器人技术规范•T/CAS 496.2-2021健康家电评价技术要求第2部分:家用清洁机器人的特殊要求•T/CAMETA 40003-2021电石出炉机器人通用技术条件•T/CAMETA 40004-2021协作机器人末端接口技术条件•T/ZZB 2099-2021化纤喷丝板板面清洗机器人•T/CEC 445-2021有缆遥控水下机器人海底电缆巡检作业规程•T/SRI 0001-2021移动服务机器人通用技术条件•T/CAMETA 40002-2021消毒服务机器人通用技术条件•T/CAMETA 40001-2021输送机巡检机器人•T/HRSA 005-2021机器人教育教学基地环境标准•T/CWAN 0028-2021机器人焊接培训基地建设规范•T/LTIA 11-2021远程超声机器人诊断新型冠状病毒肺炎操作规范•T/SZAS 28-2021远程超声机器人诊断新型冠状病毒肺炎操作规范•T/GDFSS 0002-2021智能机器人火锅系统•T/ZAITS 10501-2021机器人一体化关节性能及试验方法•T/NXJX 002-2021人机协作遥操作机器人铸件打磨系统技术要求•T/CWAN 0049-2021立式储罐无轨导爬壁焊接机器人焊接工艺规范•T/SZBX 002-2021清洁机器人•T/CWAN 0050-2021球形储罐无轨导全位置爬壁焊接机器人焊接工艺规范•T/CWAN 0049-2021立式储罐无轨导爬壁焊接机器人焊接工艺规范•T/CWAN 0050-2021球形储罐无轨导全位置爬壁焊接机器人焊接工艺规范•T/FSAS 52-2021涂胶机器人系统•T/FSAS 53-2021教育教学用机器人系统•T/ZZB 2024-2020消防灭火机器人•T/CCMIA 004-2020煤矿巷道掘进机器人系统•T/CERACU /AFCEC100.3-2020青少年编程能力等级第3部分:机器人编程•T/GDJSKB 002-2020外墙喷涂机器人•T/HFJX 2037-2020再制造敞车清扫机器人技术条件•T/CPQS E0009-2020家用和类似用途扫地机器人智能分级评价规范•T/CECWA 1001-2020钢结构接头及机器人焊接工艺标记标准•T/SCA 015-2020集装箱制造系统与基于视觉的焊接机器人互联互通技术要求•T/CECWA 5001-2020焊接机器人培训基地建设标准•T/CISA 070-2020工业机器人热成型模锻智能装备•T/ZZB 1923-2020运动康复训练用外骨骼机器人•T/AIIA 001-2020移动机器人定位导航性能评估规范•T/CCRH 0001-2020机器人科技教育教学器具配置及管理规范•T/CEC 392-2020变电站机器人巡检系统施工技术规范•T/CSPSTC 60-2020乒乓球机器人•T/CEC 393-2020配网带电作业机器人通用技术条件•T/CSPSTC 60-2020乒乓球机器人•T/CEC 391-2020变电站巡检机器人信息采集导则•T/CAMER 007-2020工业机器人离线编程规范•T/QGCML 033-2020实训设备机器人组装与调试规范•T/HRSA 004-2020机器人教育术语标准•T/CWAN 0041-2020中组立机器人焊接工艺规范•T/CWAN 0039-2020船舶纵骨角焊缝机器人焊接工艺规范•T/CWAN 0039-2020船舶纵骨角焊缝机器人焊接工艺规范•T/CWAN 0041-2020船舶用中组立机器人焊接工艺规范•T/CWAN 0040-2020小组立机器人焊接工艺规范•T/CWAN 0040-2020船舶用小组立机器人焊接工艺规范•T/HRSA 003-2020全国学校联盟双足仿人形机器人等级考试管理办法•T/CAS 428-2020综合管廊智能化巡检机器人通用技术标准•T/QGCML 022-2020机器人教师职业标准•T/SSITS 301-2020工业应用移动机器人设计通则•T/CECA 37-2020机器人用柔性电缆•T/SSITS 401-2020工业应用移动机器人检测规范•T/SSITS 101-2020工业应用移动机器人术语•T/SSITS 201-2020工业应用移动机器人通用技术条件•T/SSITS 202-2020工业应用移动机器人安全规范•T/SSITS 203-2020工业应用移动机器人数据通信接口规范•T/CAS 423-2020智能家用扫地机器人智能水平评价技术规范•T/CAQI 112-2020家用和类似用途擦(拖)地机器人•T/GDCKCJH 015-2020工业机器人伺服系统可靠性强化试验方法•T/GDCKCJH 017-2020工业机器人伺服系统可靠性指标评估•T/GDCKCJH 013-2020工业机器人伺服系统可靠性通用要求•T/GDCKCJH 016-2020工业机器人伺服系统可靠性加速试验规范•T/GDCKCJH 014-2020工业机器人伺服系统可靠性仿真试验规范•T/SZAS 16-2020小型智能教育机器人•T/HRSA 002-2020中国素质体育机器人运动通用竞赛规则标准•T/HB 0004-2020用于工业机器人的视觉系统二维自动标定方法•T/HB 0002-2020工业机器人运动可靠性评估方法•T/CI 001-2020青少年机器人技术等级教育规范•T/CSEE 0156-2020交流架空输电线路导线修补机器人作业导则•T/GDRA 012-2019互感器模具机器人抛光打磨技术要求标准•T/GDRA 011-2019互感器铁芯机器人叠片技术要求标准•T/ZZB 1371-2019泳池水下清洗机器人用电动机•T/CEC 264-2019水电站陆地巡检机器人技术导则•T/CEC 249-2019水电厂水下巡检机器人控制系统技术条件•T/CAS 378-2019家用清洁机器人性能要求•T/QDAS 019-2019工位终端搬运机器人•T/CAMA 22-2019喷杆式植保机器人•T/GDWCA 0054-2019工业机器人线缆第5 部分:工业机器人用拖链线的安装布线规范•T/GDWCA 0052-2019工业机器人线缆第3 部分:工业机器人用信号线•T/GDWCA 0051-2019工业机器人线缆第2 部分:工业机器人用电源线•T/GDWCA 0053-2019工业机器人线缆第4 部分:工业机器人用拖地线•T/GDWCA 0050-2019工业机器人线缆第1 部分:工业机器人线缆总则•T/ZAII 016-2019小件包裹分拣机器人•T/BESTDA 002-2019水上救生遥控机器人通用技术条件•T/BESTDA 001-2019安全生产巡检机器人通用技术条件•T/SZAS 7-2019儿童陪伴机器人•T/ZZB 1128-2019仓储机器人•T/ZZB 1102-2019工业喷涂机器人•T/CIE 057-2019机器人互操作通用规范•T/CIE 058.1-2019机器人互操作功能规则第1部分:声源定位•T/CIE 058-2019机器人互操作功能规则第1部分:声源定位•T/CIE 057-2019机器人互操作通用规范•T/ZAII 012-2019包装用Delta并联型机器人通用技术条件•T/ZAII 011-2019包装用关节型搬运机器人通用技术条件•T/ZAII 013-2019包装用机器人与视觉系统TCP通信接口协议•T/CSNAME 003-2019水下机器人术语•T/CSEE 0122-2019 110(66)kV~220kV变电设备带电断、接引线机器人技术规范•T/CESA 1052-2019移动机器人用锂离子电容器总规范•T/CEEIA 326-2018爆炸性环境用消防机器人防爆技术要求•T/ZZB 0656-2018工业机器人用通信指令型交流伺服系统•T/QZZN 001-2018智能机器人模特•T/ZZB 0513-2018工业机器人谐波齿轮减速器用柔性轴承•T/CVIA 64-2018室内机器人视觉同步定位及地图构建的技术规范•T/ZZB 0359-2018激光加工机器人•T/FSAS 15-2018摆臂式冲压上下料机器人•T/FSAS 22-2018工业机器人健康状态评估•T/FSAS 23-2018工业机器人可靠性评定•T/FSAS 24-2018工业机器人故障诊断规范•T/CEC 159-2018变电站机器人巡检系统扩展接口技术规范•T/CEC 161-2018变电站机器人巡检系统运维检修技术导则•T/CEC 160-2018变电站机器人巡检系统集中监控技术导则•T/CEEIA 276-2017绿色设计产品评价技术规范扫地机器人•T/FSAS 25-2018喷釉机器人生产线•T/CIE 043-2017光纤芯交换机器人通信协议格式规范•T/CIE 046-2017空间机器人地面试验要求•T/CIE 042-2017光纤芯交换机器人设计通则•T/CIE 047-2017空间机器人可见光视觉测量系统通用技术要求•T/CIE 048-2017空间机器人可见光位姿测量精度地面试验要求•T/CIE 045-2017空间机器人通用技术要求•T/CIE 044-2017光纤芯交换机器人技术要求和测试方法•T/FSAS 13-2017打磨抛光用工业机器人系统•T/FSAS 12-2017激光焊接机器人•T/FSAS 14-2017工业机器人维护保养通用技术规范•T/CSEE 0006-2016输变电设备带电检修机器人试验检测规范•T/SCES 0001-2016轮式智能巡检机器人•T/SEEMA 0001-2016轮式智能巡检机器人•T/SCMES 0001-2016轮式智能巡检机器人•T/CIE 001-2015码垛机器人技术要求与验收规范•T/CIE 003-2015轮式机器人移动平台设计通则•T/CIE 002-2015轮式机器人术语,关于民用机器人的标准•PN M42084-1990工业机器人和操作型机器人.术语•PN M42086-1989工业机器人.顺序构成连续控制系统要求和测试美国材料与试验协会,关于民用机器人的标准•ASTM F3200-22a机器人、自动化和自主系统的标准术语•ASTM E3311/E3311M-22评估地面机器人能力和远程操作员熟练程度的标准试验方法:障碍物:可变高度轨道•ASTM E2853/E2853M-22评估地面反应机器人能力的标准试验方法:搜索任务•ASTM E3310/E3310M-22评估地面机器人能力和远程操作员熟练程度的标准试验方法:操纵:将地面触点与平行轨道对齐•ASTM E3311/E3311M-21使用可变对角轨道障碍物评估机器人机动性响应的标准试验方法•ASTM E3310/E3310M-21评估穿过平行轨道的机器人机动性响应的标准试验方法•ASTM E2802/E2802M-21e1用可变跨栏障碍物评价机器人机动性的标准试验方法•ASTM E2802/E2802M-21用可变跨栏障碍物评价机器人机动性的标准试验方法•ASTM E2853-12(2021)评估应急机器人功能的标准测试方法:人机交互(HSI):搜索任务:具有复杂地形的随机迷宫•ASTM E2855-12(2021)评估应急机器人功能的标准测试方法:无线电通信:非视距范围•ASTM E2854/E2854M-21评定机器人无线电通信视线范围的标准试验方法•ASTM IEC/ASTM 62885-7-20表面清洁器具第7部分:家用或类似用途干洗机器人性能测量方法•ASTM E2827/E2827M-20用交叉俯仰/侧倾斜坡地形评估响应机器人机动性的标准试验方法•ASTM E2826/E2826M-20使用连续俯仰/侧倾斜坡地形评估响应机器人机动性的标准试验方法•ASTM E2828/E2828M-20用对称阶梯场地形评估响应机器人机动性的标准试验方法•ASTM E2829-11(2020)评估应急机器人功能的标准测试方法:移动性:机动任务:持续速度•ASTM E2830-11(2020)使用牵引任务评估应急机器人的移动能力的标准测试方法:抓住雪橇•ASTM E3132/E3132M-17评估响应机器人物流的标准实践:系统配置•ASTM E2566-17a评估响应机器人感应的标准测试方法:视力•ASTM E2991/E2991M-17评估响应机器人移动性的标准测试方法:横移砾石地形•ASTM E2992/E2992M-17评估反应机器人移动性的标准测试方法:横穿沙地形•ASTM E2566-17用于城市搜索和救援应用的机器人远程操作的车载视频系统的视觉和视场的标准测试方法•ASTM E3132/E3132M-2017评价响应机器人物流的标准实施规程: 系统配置•ASTM E2592-16响应机器人功能评估的标准实践:物流:城市搜索和救援任务组设备缓存的包装•ASTM E2521-16评估响应机器人能力的标准术语•ASTM E2592-2016评估响应机器人能力的标准实施规程: 物流: 城市搜索和救援特别小组存放设备用包装•ASTM E2521-2016评估响应机器人能力的标准术语•ASTM E2854-12评估应急机器人功能的标准测试方法:无线电通信:视线范围•ASTM E2853-12评估应急机器人功能的标准测试方法:人机交互(HSI):搜索任务:具有复杂地形的随机迷宫•ASTM E2855-12评估应急机器人功能的标准测试方法:无线电通信:非视距范围•ASTM E2855-2012评估应急响应机器人能力的标准试验方法: 无线电通信: 非传输距离•ASTM E2853-2012评估应急响应机器人能力的标准试验方法: 人类系统交互(HSI): 搜索任务: 复杂地形条件下的随机能力•ASTM E2854-2012评估应急响应机器人能力的标准试验方法: 无线电通信: 传输距离•ASTM E2827-11用于评估应急机器人能力的标准测试方法:移动性:密闭区域地形:穿越沥青路面•ASTM E2802-11评估应急机器人功能的标准测试方法:移动性:限制区域障碍:障碍•ASTM E2801-11评估应急机器人功能的标准测试方法:移动性:限制区域障碍:差距•ASTM E2830-11使用牵引任务评估应急机器人的移动能力的标准测试方法:抓住雪橇•ASTM E2803-11评估应急机器人功能的标准测试方法:移动性:密闭区域障碍物:倾斜飞机•ASTM E2828-11评估应急机器人功能的标准测试方法:移动性:限制区域地形:对称步进场•ASTM E2804-11评估应急机器人功能的标准测试方法:移动性:限制区域障碍物:楼梯/着陆•ASTM E2826-11评估应急机器人功能的标准测试方法:移动性:密闭区域地形:连续俯仰/滚动坡道•ASTM E2829-11评估应急机器人功能的标准测试方法:移动性:机动任务:持续速度•ASTM E2827-2011评估应急响应机器人能力.移动性.限制区地形.穿越球场/卷坡的标准试验方法•ASTM E2830-2011对应急响应机器人用拖带任务的机动能力评估的标准试验方法(抓紧滑车)•ASTM E2829-2011应急响应机器人机动性能力评估的标准试验方法(策略行动任务:持续速度)•ASTM E2828-2011评估应急响应机器人能力.移动性.限制区地形.对称梯区的标准试验方法•ASTM E2826-2011评估应急响应机器人能力.移动性.限制区域地形.连续沥青/卷坡的标准试验方法•ASTM E2804-2011评估应急响应机器人能力.移动性.限制区域障碍物.楼梯/着陆的标准试验方法•ASTM E2803-2011评估应急响应机器人性能(应对有限区域内的障碍物(斜面)时的灵活性)的标准试验方法。
2020年智慧树知道网课《工业机器人》课后章节测试满分答案
第一章测试1【判断题】(2分)工业机器人由操作机、控制器、伺服驱动系统和检测传感装置构成。
A.错B.对2【判断题】(2分)被誉为“工业机器人之父”的约瑟夫·英格伯格最早提出了工业机器人概念。
A.错B.对3【判断题】(2分)直角坐标机器人的工作范围为圆柱形状。
A.对B.错4【判断题】(2分)工业机器人的机械结构系统由基座、手臂、手腕、末端操作器4大件组成。
A.对B.错5【多选题】(2分)工业机器人按臂部的运动形式分为哪几种?A.圆柱坐标型(如SCARA)B.直角坐标型C.球坐标型D.关节型机器人第二章测试1【判断题】(2分)串联机器人,一个轴的运动不会改变另一个轴的坐标原点。
A.对B.错2【判断题】(2分)串联机械手是一种开式运动链机器人,它是由一系列连杆通过转动关节或移动关节串联形成的姿态。
A.对B.错3【判断题】(2分)串联机器人中,小型机器人定义的臂长是小于1m,负载是小于10kgA.对B.错4【多选题】(2分)串联机器人常见安装方式有哪几种?A.墙装B.地装C.斜装D.倒装5【多选题】(2分)依据技术指标进行串联机器人选型的时候初步选择有哪些?A.节拍时间B.荷重C.作业空间D.精度第三章测试1【判断题】(2分)并联机器人,一个轴的运动不会改变另一个轴的坐标原点。
A.对B.错2【判断题】(2分)并联机械手采用了一种闭环机构,一般由上下运动平台和两条或者两条以上运动支链构成。
A.对B.错3【多选题】(2分)相比串联机器人,并联机器人的特点是?A.需要减速器B.电机位于机架,惯量小C.驱动功率不同,电机型号不一D.逆解简单4【多选题】(2分)常见的并联机器人有哪几种?A.平面并联B.SwewartC.deltaD.柔索牵引E.球面并联5【多选题】(2分)柔索牵引并联机器人可分为哪几种类型?A.反约束定位机构B.完全约束定位机构C.欠约束定位机构D.冗余约束定位机构第四章测试1【单选题】(2分)()是整个机器人的支持部分,有固定式和移动式两类A.手部B.手臂C.机座D.腕部2【单选题】(2分)工业机器人的腕部是手部和手臂之间的连接部件,一般采用()自由度多关节结构A.5B.3C.4D.23【多选题】(2分)驱动器选择应考虑()成本以及其他因素A.定位精度B.可靠性C.负载大小D.运动速度4【多选题】(2分)实现机器人回转机构的运动形式多种多样,常用的有()A.链轮传动机构B.叶片式回转缸C.齿轮机构D.齿轮传动机构5【判断题】(2分)驱动电动机一般采用步进电机,直流4V电动机,交流4V电动机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十章《简单机械》单元测试
一、选择题:(每题3分,共24分)
1.使用杠杆为我们的生活带来方便,下列杠杆的使用能够省距离的是( )
A .
开瓶器
B . 镊子
C .
钳子
D .
自行车手闸
2. 如图所示,是体能测试中掷出的实心球运动的情景,下列说法正确的是( ) A . 实心球离开手后继续前进,是由于受到惯性的作用 B . 实心球在b 点时,处于平衡状态
C . 实心球从a 点运动到c 点的过程中,重力做了功
D . 在实心球从b 点运动到c 点的过程中,动能转化为重力势能
3.农业部门利用飞机喷洒农药消灭蝗虫.当飞机在某一高度水平匀速飞行喷洒农药时,它的( ) A .动能不变,势能不变 B .动能减少,势能增加 C .动能增加,势能减少 D .动能减少,势能减少
4.如图所示,斜面高为1m ,长为4m ,用沿斜面向上大小为75N 的拉力F ,将重为200N 的木箱由斜面底端匀速缓慢拉
到顶端,下列关于做功的判断正确的是:
A.木箱受到重力做功的大小为800J
B.木箱受到斜面摩擦力做功大小为100J
C.木箱受到合力做功的大小为125J
D.木箱受到斜面的支持力做功大小为200J
5.起重机将建筑材料由地面提升到楼顶,第一次用15000N 的竖直拉力F 1将材料甲匀速提升15 m ;第二次用10000N 的竖直拉力F 2将材料乙匀速提升15m .对于上述两个过程,下列说法中正确的是( ) A .甲的速度一定等于乙的速度 B .甲的质量一定大于乙的质量
C .拉力F 1做的功一定大于拉力F 2做的功
D .甲运动的时间一定小于乙运动的时间 6.下列关于功率的说法正确的是( )
A .功率大的机器做的功一定多
B .功率大的机器做功时间一定短
C .功率大的机器做功一定快
D .功率大的机器机械效率一定高
7. 用一个定滑轮和一个动滑轮组成的滑轮组把重150N 的物体匀速提升1m,,不计摩擦和绳重,滑轮组的机械效率为60%.则下列选项中错误的是 ( ) A .有用功一定是150J B .拉力大小一定是125N C .总功一定是250J D .动滑轮重一定是100N
8、图中是一个两面光滑的斜面,∠β大于∠α,同一个物体分别在AC 和BC 斜面受拉力以相同的速度匀速运动到C 点,所需拉力分别为F A 、F B ,所做功分别为W A 、W B ,拉力做功的功率分别为P A 、P B ,则( )
A .F A =F
B ,W A =W B ,P A =P B B .F A <F B ,W A =W B ,P A <P B
C .F A <F B ,W A <W B ,P A <P
B D .F A >F B ,W A >W B ,P A >P B
二.填空题:(每空1分,共20分)
9.在探究”汽车的速度”的实验中,甲乙两辆质量相同的汽车在同一水平地面上做直线运动的s-t 图象如图所示。
由图可知,甲乙两车牵10.做功的两个必要因素是:一、 ;二、 。
=
17.如图,不计摩擦和绳重,用200N竖直向上的拉力F将480N重的物体G以0.3m/s的速度匀速提升,则滑轮组的机械效率η= ,拉力F的功率P= W.
三、作图与实验探究(31分)
18.如图所示,用起子开启瓶盖,请确定支点O的位置,画出F的力臂.
19.如图所示,画出使轻质杠杆保持平衡的最小力F的示意图和对应的力臂.
20.用如图所示的滑轮组提升重物,要求绳子自由端移动的速度是物体
上升速度的2倍,请在图上画出绕线的方法.
21.在探究“杠杆平衡条件”的实验中,采用了如图所示的实验装置.
选用图乙探究的是动能与质量的关系,得出的结论
四、计算题:(25分)
24.(8分)按照规定,我国载货车辆的轮胎对地面的压强应控制在7×105Pa以内。
某型号
货车部分参数如表所示。
司机师傅在执行一次运输任务时,开着装满沙子的货车在一段平直
的公路上匀速行驶8km,所用时间是6min,该路段限速60km/h(取g=10N/kg,ρ砂
=2.5×103kg/m3)。
(1)车厢内所装沙子的质量是多少?(2)货车的速度为多少km/h?
(3)货车轮胎对地面的压强是多少?(4)货车在这段公路上行驶时所受阻力为车重的0.03倍,这段时间内货车牵引力所做的功和功率分别是多大?
25.(5分)斜面也是一种简单机械。
如图5所示,已知斜面上木箱的质量m=40kg,人对木箱的拉力F=75 N,斜面长s=4 m,斜面高h=O.5 m。
求:①木箱受到的重力(g取10 N/kg);
②斜面的机械效率。
26.(6分)如图9所示,在50N的水平拉力F作用下, 重800N的物体沿水平地面做匀速直线运动, 物体与地面间滑动摩擦力为120N.则滑轮组的机械效率为多少?若物体的速度为0.2m/s,则1min内拉力做的功为多少?
27.(6分)用如图所示滑轮组在15s内将重1000N的物体匀速上升了3m,人用拉力的F为400N,不计绳重和摩擦力.求:(1)动滑轮的重;(2)绳子自由端拉力F的功率;(3)滑轮组的机械效率;(4)若将重物的重力增加200N后,用这滑轮组将重物匀速提高相同的高度,该滑轮组的机械效率是多少?(结果百分数保留一位小数)
9、,。
10、,。
11、。
12、,,,。
13、,。
14、。
,。
15、。
16、,,。
17、,。
18、 19、 20、
21、(1),,(2),,(3),(4),。
22、(1),(2),(3),(4),,
(5)。
23、(1),,,(2),(3),,(4) , .
24、
25、
26、
27、。