台达A系列伺服电机调试步骤
伺服电机的调试步骤

伺服电机的调试步骤伺服电机是一种能够根据反馈信号控制位置和速度的电动机。
调试伺服电机主要涉及到参数设置、回路调节以及系统性能测试等方面。
下面是关于伺服电机调试步骤的详细说明。
步骤一:安装布置1.确保伺服电机正确安装到目标设备上,并连接好电源和控制器。
2.检查电机和控制器的接口是否正确连接,并确认连接线松紧适宜。
步骤二:设置控制器参数1.根据伺服电机的技术参数和要求,进行控制器参数的设置,如编码器分辨率、调度频率等。
2.设置控制器的电流限制以及过压、过流等保护参数,以确保电机的安全运行。
步骤三:调节电流环1.首先,先将速度环和位置环的比例增益设置为0,即断开速度反馈和位置反馈,只进行电流环的调节。
2.根据电机的静态工作电流和最大运行电流,逐步增加电流环的比例增益,观察电机运行是否正常,避免产生振荡或过流等异常现象。
3.测量和检查电机的静态电流和冷启动电流,调整电流环的积分增益,尽量减小静态偏差,并提高电机的动态响应性能。
步骤四:调节速度环1.首先,将位置环的比例增益设置为0,仅保持电流环的闭环控制,在此基础上进行速度环的调节。
2.将速度环的比例增益设置为一个较小的初始值,然后逐步增大,以避免过冲和超调。
观察电机的速度响应是否稳定且迅速。
3.根据速度环的实测速度和设定速度,调整速度环的积分增益,以改善电机的速度跟踪和稳定性能。
步骤五:调节位置环1.将位置环的比例增益设置为一个适当的初始值,然后逐步增大。
观察电机的位置跟踪和稳定性能。
2.根据位置环的实测位置和设定位置,调整位置环的积分增益,以改善电机的位置跟踪和稳定性能。
3.根据电机的运行要求,调整位置环的微分增益,以提高系统的稳定性和动态性能。
步骤六:系统性能测试1.进行伺服电机的系统性能测试,如频率响应测试、阶跃响应测试、脉冲响应测试等。
2.根据测试结果,调整和优化伺服电机的各个环节参数,以提高系统的控制精度和动态性能。
步骤七:系统稳定性验证1.在不同工作负荷和工作条件下,对伺服电机进行稳定性验证,观察和记录其动态响应和稳定性能。
台达A2系列伺服电机调试步骤(2019.7.12)

第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通EBproV6.0设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如0.001mm,相当于一个脉冲想走的距离0.001mm;b.行走速度200mm/s,PLC最大发脉冲数2000000*0.001(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径63.66mme.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
调试伺服电机的六大步骤及注意事项
调试伺服电机的六大步骤及注意事项伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
今天与大家分享的就是伺服电机的调试方法和注意事项。
伺服电机的调试方法伺服电机的注意事项1、伺服电机油和水的保护A:伺服电机可以用在会受水或油滴侵袭的场所,但是它不是全防水或防油的。
因此,伺服电机不应当放置或使用在水中或油侵的环境中。
B:如果伺服电机连接到一个减速齿轮,使用伺服电机时应当加油封,以防止减速齿轮的油进入伺服电机。
C:伺服电机的电缆不要浸没在油或水中。
2、伺服电机电缆→减轻应力A:确保电缆不因外部弯曲力或自身重量而受到力矩或垂直负荷,尤其是在电缆出口处或连接处。
B:在伺服电机移动的情况下,应把电缆(就是随电机配置的那根)牢固地固定到一个静止的部分(相对电机),并且应当用一个装在电缆支座里的附加电缆来延长它,这样弯曲应力可以减到最小。
C:电缆的弯头半径做到尽可能大。
3、伺服电机允许的轴端负载A:确保在安装和运转时加到伺服电机轴上的径向和轴向负载控制在每种型号的规定值以内。
B:在安装一个刚性联轴器时要格外小心,特别是过度的弯曲负载可能导致轴端和轴承的损坏或磨损。
C:最好用柔性联轴器,以便使径向负载低于允许值,此物是专为高机械强度的伺服电机设计的。
D:关于允许轴负载,请参阅“允许的轴负荷表”(使用说明书)。
4、伺服电机安装注意A:在安装/拆卸耦合部件到伺服电机轴端时,不要用锤子直接敲打轴端。
(锤子直接敲打轴端,伺服电机轴另一端的编码器要被敲坏)B:竭力使轴端对齐到最佳状态(对不好可能导致振动或轴承损坏)。
台达A2伺服配线及操作

台达A2伺服配线及操作伺服驱动器是一种高性能运动控制设备,广泛应用于机械加工、物流设备、仪器仪表等领域。
而台达A2伺服驱动器是台达电子推出的一款先进的伺服驱动器,具有高稳定性、高精度和高效能的特点。
本文将介绍台达A2伺服驱动器的配线及操作。
首先,说到伺服驱动器的配线,我们需要了解一些基本概念。
在伺服驱动器的使用过程中,通常需要进行电源和信号线的连接。
电源线连接到伺服驱动器的电源接口,用来提供工作所需的电力;信号线连接到伺服驱动器的信号接口,用来传输指令和反馈信号。
在进行配线之前,一定要确保伺服驱动器处于断电状态,以确保安全。
接下来,我们来具体介绍一下台达A2伺服驱动器的配线步骤:1.确认电源线的接线口。
台达A2伺服驱动器通常有两个电源接线口,分别是主电源接线口和控制电源接线口。
主电源接线口连接到主电源,用来提供运动控制的电力;控制电源接线口连接到控制器,用来提供控制信号的电力。
2.连接电源线。
根据实际情况,选择适合的电源线,一端连接到伺服驱动器的电源接线口,另一端连接到电源。
3.确认信号线的接线口。
台达A2伺服驱动器通常有几个信号接线口,包括运动指令输入、位置反馈输入和报警输出等。
根据实际控制需求,选择适合的信号接线口。
4.连接信号线。
根据实际情况,选择适合的信号线,一端连接到伺服驱动器的信号接线口,另一端连接到控制器或传感器。
5.安装连接好的伺服驱动器。
将连接好的伺服驱动器安装到合适的位置,并固定好。
完成上述配线步骤后,我们可以进行台达A2伺服驱动器的操作。
伺服驱动器的操作可以通过控制器或人机界面进行。
下面是一些常见的操作步骤:1.通电前的检查。
在通电之前,需要检查伺服驱动器的电源线、信号线以及控制器的连接是否正确。
2.通电。
将主电源和控制电源分别接通,并确保伺服驱动器的指示灯亮起,表示电源正常。
3.参数设置。
通过控制器或人机界面,设置伺服驱动器的参数,包括运动控制参数、速度参数和位置参数等。
伺服电机的调试步骤(精)

伺服电机的调试步骤伺服电机的调试步骤1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID 参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V 的控制电压。
比如,松下是设置1V 电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC )上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V 以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
台达伺服实现伺服电机正反转怎么调
台达伺服实现伺服电机正反转怎么调
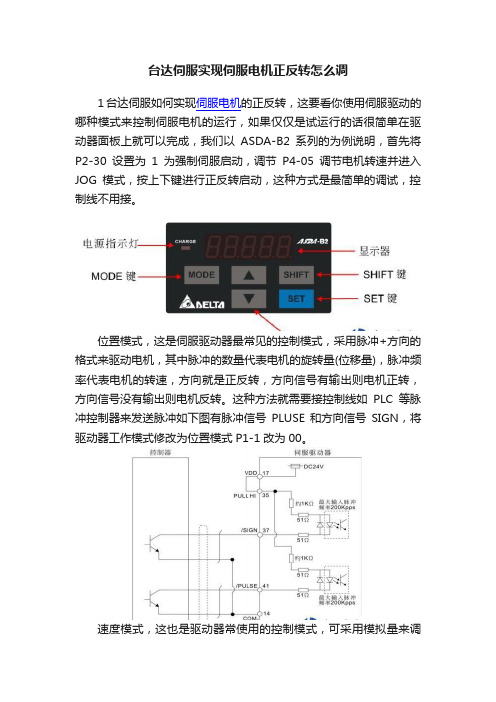
1台达伺服如何实现伺服电机的正反转,这要看你使用伺服驱动的哪种模式来控制伺服电机的运行,如果仅仅是试运行的话很简单在驱动器面板上就可以完成,我们以ASDA-B2系列的为例说明,首先将P2-30设置为1为强制伺服启动,调节P4-05调节电机转速并进入JOG模式,按上下键进行正反转启动,这种方式是最简单的调试,控制线不用接。
位置模式,这是伺服驱动器最常见的控制模式,采用脉冲+方向的格式来驱动电机,其中脉冲的数量代表电机的旋转量(位移量),脉冲频率代表电机的转速,方向就是正反转,方向信号有输出则电机正转,方向信号没有输出则电机反转。
这种方法就需要接控制线如PLC等脉冲控制器来发送脉冲如下图有脉冲信号PLUSE和方向信号SIGN,将驱动器工作模式修改为位置模式P1-1改为00。
速度模式,这也是驱动器常使用的控制模式,可采用模拟量来调
节,类似于变频器调速一样,模拟信号-10v~+10v,数值的大小代表转速的快慢,符号代表旋转方向,如模拟输入- 5v的信号,则驱动器控制伺服电机以最大速度的一般反方向旋转,速度模式为P1-1参数修改为02。
台达A2系列伺服电机调试步骤(2019.7.12)

第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通EBproV6.0设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如0.001mm,相当于一个脉冲想走的距离0.001mm;b.行走速度200mm/s,PLC最大发脉冲数2000000*0.001(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径63.66mme.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
台达DVP15MC11T与ASDA-A2伺服电机调试方法

台达绝对型编码器伺服系统的参数设置(DVP15MC11T与ASDA-A2 伺服驱动器)一,手动设定参数 :在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
1.设置伺服驱动器站号(P3-00),伺服从1开始依次设定。
2.设置伺服电机与PLC的通讯速率(P3-01,可以设置为403)3.设置伺服电机的运动模式(P1-01如设置为000B就是CANopen模式搭配台达PLC(DVP15MC11T)),第三位数值可以设置电机运行方向。
4.设置伺服电机的正反向禁止极限,和急停触发。
(P2-10-P2-17) 检测P2-10到P2-18,(P2-10到P2-17,对应DI1到DI8)报警代号:AL013,紧急停止报警,检查P2-10到P2-17中有没有设定为21,将其设定为反向信号,或者设定为0。
报警代号:AL014,反向运作极限报警,检查P2-10到P2-17中有没有设定为22,将其设定为反向信号,或者设定为0。
报警代号:AL015,正向运作极限报警,检查P2-10到P2-17中有没有设定为23,将其设定为反向信号,或者设定为0。
正常限位接DI6,DI7,对应的是P2-15,P2-16,5.设置电机在绝对型编码器下的参数。
首先P2-69(绝对型编码器设定)为1,设置P2-08为271,设置P2-71(绝对位置归零,1:将目前编码器位置归零)为1,然后设置P3-12为100(只适用于P1-01=000B,即CANopen模式),设置完成后断电重启。
6.再设置伺服电的电子齿轮比,在CANopen Builder软件中也可设定,软件中设定后伺服驱动器上面就不用设置。
7.设置驱动器状态显示(P0-02为00,就是电机回授脉冲数)8.伺服电机回原点设置参数为:以下参数也可在CANopen Builder软件中设定,一般设定原点回归模式为:模式17。
伺服电机调试步骤及操作规程

伺服电机调试步骤及操作规程伺服电机调试步骤伺服电机可使掌控速度,位置精度特别精准,可以将电压信号转化为转矩和转速以驱动掌控对象。
伺服电机转子转速受输入信号掌控,并能快速反应,在自动掌控系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其紧要特点是,当信号电压为零时无自转现象,转速随着转矩的加添而匀速下降。
以下是关于其调试的步骤说明:1、初始化参数在接线之前,先初始化参数。
在掌控卡上:选好掌控方式;将PID参数清零;让掌控卡上电时默认使能信号关闭;将此状态保存,确保掌控卡再次上电时即为此状态。
在伺服电机上:设置掌控方式;设置使能由外部掌控;编码器信号输出的齿轮比;设置掌控信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的掌控电压。
比如,山洋是设置1V电压对应的转速,出厂值为500,假如你只准备让电机在1000转以下工作,那么,将这个参数设置为111、2、接线将掌控卡断电,连接掌控卡与伺服之间的信号线。
以下的线是必需要接的:掌控卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和掌控卡(以及PC)上电。
此时电机应当不动,而且可以用外力轻松转动,假如不是这样,检查使能信号的设置与接线。
用外力转动电机,检查掌控卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环掌控系统,假如反馈信号的方向不正确,后果确定是祸害性的。
通过掌控卡打开伺服的使能信号。
这是伺服应当以一个较低的速度转动,这就是传说中的“零漂”。
一般掌控卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)掌控。
假如不能掌控,检查模拟量接线及掌控方式的参数设置。
确认给出正数,电机正转,编码器计数加添;给出负数,电机反转转,编码器计数减小。
伺服电机的调试步骤
伺服电机的调试步骤
1、传动系统的调试
①根据电机和驱动系统的安装,选择适当的电机和驱动电路;
②连接好电机的接线,并安装驱动板;
③调整电机的零点位置,确定运行电机的速度和位置;
④按照图纸设定伺服系统的参数;
⑤校正传动系统的延迟,确保电机和驱动系统的协调工作。
2、安全检查
①在调试之前,先检查电机和驱动系统的安装是否规范;
②检查电机的接线是否正确;
③检查控制器的参数是否已设置;
④检查安全保护装置的安装是否规范,是否正确连接。
3、系统调试
①将伺服电机由关机状态转换到启动状态;
②根据图纸设定电机的初始参数;
③根据控制系统设定的系统参数运行电机;
④进行相关的负荷调试,确保正常的运行;
⑤根据要求进行精密定位,确保精确的位置控制。
4、实验调试
①启动多台电机,检查正常运行;
②进行快速调节控制,检查控制器的响应性;
③进行反复的实验,完成位置精准控制;
④根据实验结果,对系统的调节参数进行调整,完成性能调试。
5、故障排除
①检查控制系统的参数是否设置正确;。
(完整版)伺服电机的调试步骤

伺服电机的调试步骤1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
台达伺服调机步骤简易说明书

台达伺服调机步骤简易说明书■f 中达电iB台达伺服调机步骤简易说明书本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书 只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一:检查确定伺服驱动器及电机是否为所需型号;注意安装环境。
(祥见操作手册):配线(1)周边装置接线图T”橙冼R , S r T L1 JL2的电源和接线昱否正佛2一确认恫服电机输出U , V , wffl 子相序按线是否正昵m 便用扑部冋生也si 吋需将p ’Dss 开踣,外部冋生屯阻庙:接於■巴c 瑞.掉便用内部冋q :. 电阻时剧需将P. D 端fei^HP.C 端幵幽4.界警■紧急停止时’利用ALRM^tU 将屯磴按触話(IWC )断电・U (切断屯机电Jfi.CN3QN1g 连接,湮至上位控" 上住机不一妊是PLC.也可是数挫系辯.等!100W-1KW120 O'230V2KW-S KW S z HH200'230V周服屯机电磁接触擀(MC )CN2編屈器连按通削字接盂要用到蚂迅 功龜吋才希按CN3 !蚩辈注点爭项驅動器容量電機型號100w ASMT-01L250X 200w ASMT-02L250X 400w ASMT-04L250X 750W ASMT-07L250X1KW ASMT-10L250XASMT-10M250X En coder Conn ectorHOUSING:AMP(1-1318118-6)20-29E中迖电直(2)信号与配线请根据您所需的控制模式和具体要求功能来配线,不同控制模式的配线是不同的,具体请参照手册3-23至3-26页说明。
但请注意,1■无论是什么控制模式,伺服驱动器均需DC24V电源,您可以让驱动器自已供给此电源(PIN17脚VDD与PIN11脚COM+短接);也可以外加POWER 供电(+24接伺服驱动器PIN11脚COM+,GND接伺服的PIN45,47,49 脚COM-); 2■驱动器均需SERVO ON,如参数没有变动,PIN9脚DI1 SON 信号需导通。
台达A系列伺服电机调试步骤

第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤;二、需准备的材料1、西门子S7-1200系列PLC一台我们准备的S7-1200 CPU1215C DC/DC/DC2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V的电压;建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制CN1端口如何接线将提供接线图来接线;1、伺服驱动器的参数设置1、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位;画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来;①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44分子和P1-45分母电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如,相当于一个脉冲想走的距离;b.行走速度200mm/s,PLC最大发脉冲数2000000目前伺服电机最快20m/minc.电机编码器分辨率1280000P/Rd.齿轮分度圆直径e.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可;2、西门子PLC运动控制指令的编写1)、打开博图V15软件,添加设备创建新项-然后在跳出的画面左下角点击项目视图添加新设备根据PLC的型号来选择添加2、添加工艺对象进行组态添加工艺对象-新增对象-填入名称-选择运动控制-点击定位轴TO_PositioningAxis添加轴后在组态里面设置所需设定的参数如下图驱动器类型选择PTO脉冲+方向扩展参数机械-就按照这个参数不需调整因为已经把电子齿轮比写入驱动器了扩展参数位置限制—设定硬件限位开关地址以及电平动态常规根据所需设定,加减速时间可以调成,5s时间太长了,停止后还需运行5s动态急停—设定的道理跟常规一样,根据所需设定回原点—主动—输入原点开关地址,然后速度根据需要调整,逼近速度指碰到原点开关前的一个速度,回原点速度是碰到原点开关后的一个运行速度;2)、添加程序块—添加函数—输入名称—选择语言LAD—然后确定注:语言:LAD L_adder_Logic梯形逻辑;FBD Function Block Diagram 功能块图编程语言SCL Structured Control Language 结构化控制语言3、程序块添加之后在项目树程序块下双击刚刚建立的程序块ServoMotor—在右边指令表中打开工艺—打开Motion Control运动指令,选择你所需要的指令,拖动到程序段中,然后进行编写;此网址可以查看运动指令的功能介绍我们目前只用到MC_Power启用/禁用轴、MC_Reste确认错误、MC_Home回原点、MC_MoveJog点动运动、MC_MoveAbsolute绝对定位,按照运动指令的功能介绍将程序编写完成4、将写好的程序放入到主程序块Main中,直接打开主程序块,然后拖动函数块Servo MotorFC1到主程序中;5、新增数据块DB_Servo用于保存记录程序中的数据,3、威纶通触摸屏添加西门子S7-1200PLC操作步骤1、打开威纶通触摸屏软件,新建文件选择触摸屏的型号,然后确定2、打开软件后跳出系统参数设置画面—新增—设备类型选择你所用的PLC型号—接口类型以太网—IP地址设定跟PLC设定相同的地址—然后导入标签—标签类型如图—确定导入标签导入PLC里面的变量和DB数据块3、如何设置PLC和将PLC里面的变量和数据块导入出来;在PLC里面属性设置一下操作a、PLC属性里面安全与防护点击——访问级别——完全访问权限然后往下拉,两个参数前面打勾如下图b、在PLC变量里面打开显示所有变量——点击左上角导出的箭头,将变量导出可以将导出的文件放到桌面,方便添加c、将PLC程序中DB数据块导出来导出的文件也可放在桌面,右击DB块——从块生成源——包含所有关联块d、将导出的文件导入到触摸屏中,文件格式如下图;4、PLC添加好之后就可以进行编辑了;。
台达A系列伺服电机调试步骤

台达A系列伺服电机调试步骤调试台达A系列伺服电机的步骤如下:1.硬件准备:确认电源和接地正常,并检查电源电压是否符合伺服电机的要求。
准备所需的调试工具,如示波器、万用表等。
2.连接电源和电机:将伺服电机与适配器或驱动器连接,并将电源线和信号线正确连接。
确保连接正确,避免反极性和短路等问题。
3.电机参数设置:在伺服驱动器中,设置电机的参数,如额定电压、额定电流、脉冲分辨率等。
这些参数应根据电机的规格和要求进行设置,以确保电机能够正常运行。
4.伺服驱动器接线检查:检查伺服驱动器的接线情况,确保电源线、信号线和编码器线等连接正确。
注意查看是否有损坏的线缆或插头等。
5.伺服驱动器参数设置:根据具体的应用需求,设置伺服驱动器的参数。
包括控制模式、倍率、加减速时间、速度限制等。
这些参数的设置会直接影响伺服电机的运动特性。
6.示波器监测:使用示波器监测伺服驱动器的输出信号和电机的运动情况。
通过示波器,可以观察到电机的转矩、速度、位置等参数的变化,以判断伺服系统是否正常工作。
7.动态调试:开始进行动态调试,逐步增加伺服系统的负载并观察其响应。
通过逐步增加负载,可以观察到伺服电机的性能并进行相应的调整。
8.脉冲信号调试:调试脉冲信号的频率、脉冲宽度和脉冲类型等参数。
通过调试脉冲信号,可以改变电机的转速、运动方向和运动步长等。
9.反馈参数调试:根据实际情况调试反馈系统的参数,如位置偏差、速度偏差和合流误差等。
通过调整这些参数,可以提高伺服系统的控制精度。
10.稳定性测试:稳定性测试是调试的最后一步,测试伺服系统在不同负载和运动速度下的稳定性。
通过稳定性测试,可以确定伺服电机是否正常工作,并进行最后的调整和优化。
总结:台达A系列伺服电机调试的步骤包括硬件准备、连接电源和电机、设置电机参数、检查伺服驱动器接线、设置伺服驱动器参数、示波器监测、动态调试、脉冲信号调试、反馈参数调试和稳定性测试。
这些步骤的目的是确保伺服系统能够正常工作并满足实际应用需求。
台达A2系列伺服电机调试步骤

台达A2系列伺服电机调试步骤调试步骤如下:1.首先,了解A2系列伺服电机的参数和特性。
了解电机的额定转矩、额定转速、电机编号等参数。
同时,了解伺服电机的工作原理和控制方式,以便在调试过程中能够理解和解决问题。
2.确定伺服电机的机械连接。
将电机和负载连接在一起,例如通过联轴器。
确保机械连接牢固可靠,以保证传递电机的转动力矩和转速给负载。
3.进行电气连接。
将伺服电机的输入端(通常是三相交流电源)和输出端(通常是编码器和控制器)与其他电气设备连接好。
检查电气连接是否正确,例如插头是否插紧,线路是否接触良好等。
4.设置参数。
根据实际情况,对伺服电机的控制器进行参数设置。
这些参数包括速度环、位置环、加速度环等。
根据机械系统的特性,调整这些参数以使电机能够稳定工作,并实现所需的性能。
5.进行功率调试。
通过控制器提供的接口,调整电机的工作功率。
测试电机在不同负载和转速下的输出性能,并记录相应的数据。
根据测试结果,调整功率参数或机械系统,以优化电机的功率输出。
6.进行控制调试。
通过控制器的接口设定所需的控制模式,例如位置控制、速度控制或力矩控制等。
测试电机在不同控制模式下的响应性能,并记录相应的数据。
根据测试结果,调整控制参数或机械系统,以实现更好的控制性能。
7.进行保护调试。
根据实际需要,为电机设置保护功能,例如过流保护、过热保护、过载保护等。
通过模拟和测试不同的故障和异常情况,检验保护功能的可靠性和响应性,并记录相应的数据。
根据测试结果,调整保护参数或机械系统,以提高电机的安全性和可靠性。
8.进行稳定性调试。
通过控制器的接口设定所需的稳定性要求,例如阻尼、迟滞等。
测试电机在不同负载、转速或控制模式下的稳定性,并记录相应的数据。
根据测试结果,调整稳定性参数或机械系统,以使电机能够稳定工作在所需的工况下。
9.进行性能验证。
将伺服电机安装在实际工作环境中,并进行性能验证。
测试电机在实际工况下的工作性能、响应性能和稳定性,并记录相应的数据。
台达A2系列伺服电机调试步骤
第七轴通过伺服电机运行的调试步骤一、概述此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C DC/DC/DC)2、台达伺服电机ECMA-L110 20RS一台3、台达伺服控制器ASD-A2-2023-M一台4、威纶通触摸屏MT-8012IE一台5、博途V15设计软件6、威纶通EBproV6.0设计软件三、调试步骤及简单说明调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置1)、伺服驱动器面板介绍2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为233)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作步骤如下图4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000②、P1-00设定成脉冲列+符号 00002③、P0-02 设置驱动器显示状态监视输入脉冲 01④、设定电子齿轮比P1-44(分子)和P1-45(分母)电子齿轮比需计算,计算方式如下:前提所需条件:a.产品所要达到的精度要求比如0.001mm,相当于一个脉冲想走的距离0.001mm;b.行走速度200mm/s,PLC最大发脉冲数2000000*0.001(目前伺服电机最快20m/min)c.电机编码器分辨率1280000P/Rd.齿轮分度圆直径63.66mme.减速机速比10f.m/n电机轴与负载轴的机械减速比⑤、将P1-44设为8400,P1-45设为3183⑥、重新启动伺服驱动器,即可。
台达伺服调试

何謂伺服的低頻擺振?當發生低頻擺振時如何處理?若系統剛性不足,在定位命令結束後,即使馬達本身已經接近靜止,機械傳動端仍會出現持續擺動。
低頻抑振功能可以用來減緩機械傳動端擺動的現象。
低頻抑振的範圍為 1.0 ~ 100.0Hz。
本功能提供手動設定與自動設定,但目前只有ASDA-A2系列機種支援此功能。
低頻抑振方式分為自動及手動方式:(1) 自動設定若使用者難以直接知道頻率的發生點,可以開啟自動低頻抑振功能。
此功能會自動尋找低頻擺動的頻率。
若P1-29設定為1時,系統會先自動關閉低頻抑振濾波功能,並開始自動尋找低頻的擺動頻率。
當自動偵測到的頻率維持固定後,P1-29會自動設回0,並會將第一擺動頻率設定在P1-25且P1-26設為1。
第二擺動頻率設定在P1-27且將P1-28設為1。
當P1-29自動設回零後,低頻擺動依然存在,請檢查低頻抑振P1-26或P1-28是否已被自動開啟。
若P1-26與P1-28皆為零,代表沒有偵測到任何頻率,此時請減少低頻擺動檢測準位P1-30,並設定P1-29 = 1,重新尋找低頻的擺動頻率。
(2) 手動設定低頻抑振有兩組低頻抑振濾波器,第一組為參數P1-25 ~ P1-26,第二組為參數P1-27 ~ P1-28。
可以利用這兩組濾波器來減緩兩個不同頻率的低頻擺動。
參數P1-25與P1-27用來設定低頻擺動所發生的頻率,低頻抑振功能唯有在低頻抑振頻率參數設定與真實的擺動頻率接近時,才會抑制低頻的機械傳動端的擺動。
參數P1-26與P1-28用來設定經濾波處理後的響應,當P1-26與P1-28設定越大響應越好,但設太大容易使得馬達行走不順。
參數P1-26與P1-28出廠值預設值為零,代表兩組濾波器的功能皆被關閉。
伺服煞車電阻使用時機為何?當伺服驅動器搭配馬達運轉時,若驅動器面板出現ALE05(回生能量異常)時,代表馬達回生產生的能量超過驅動器內建回生電阻所能消耗的能量,此時必須安裝回生電阻,提高驅動器回生能量消耗速度。
伺服电机的6大调试步骤

伺服电机的6大调试步骤伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机可应用在是火花机、机械手、精确的机器等方面,通常只要是要有动力源的,而且对精度有要求的一般都可能涉及到伺服电机。
在使用伺服电机之前都要对其进行调试,下面电工学习网小编带领大家学习了解伺服电机的6大调试步骤。
1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V 的控制电压。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,伺服电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置。
3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V 以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
台达DVP15MC11T与ASDA-A2伺服电机调试方法
台达绝对型编码器伺服系统的参数设置(DVP15MC11T与ASDA-A2 伺服驱动器)一,手动设定参数 :在使用伺服专用指令之前,需要先将伺服做一些初始化设定,步骤如下 :1.将伺服 P2-08 设置为 10,回归原厂设定。
2.将伺服断电后重新上电。
1.设置伺服驱动器站号(P3-00),伺服从1开始依次设定。
2.设置伺服电机与PLC的通讯速率(P3-01,可以设置为403)3.设置伺服电机的运动模式(P1-01如设置为000B就是CANopen模式搭配台达PLC(DVP15MC11T)),第三位数值可以设置电机运行方向。
4.设置伺服电机的正反向禁止极限,和急停触发。
(P2-10-P2-17) 检测P2-10到P2-18,(P2-10到P2-17,对应DI1到DI8)报警代号:AL013,紧急停止报警,检查P2-10到P2-17中有没有设定为21,将其设定为反向信号,或者设定为0。
报警代号:AL014,反向运作极限报警,检查P2-10到P2-17中有没有设定为22,将其设定为反向信号,或者设定为0。
报警代号:AL015,正向运作极限报警,检查P2-10到P2-17中有没有设定为23,将其设定为反向信号,或者设定为0。
正常限位接DI6,DI7,对应的是P2-15,P2-16,5.设置电机在绝对型编码器下的参数。
首先P2-69(绝对型编码器设定)为1,设置P2-08为271,设置P2-71(绝对位置归零,1:将目前编码器位置归零)为1,然后设置P3-12为100(只适用于P1-01=000B,即CANopen模式),设置完成后断电重启。
6.再设置伺服电的电子齿轮比,在CANopen Builder软件中也可设定,软件中设定后伺服驱动器上面就不用设置。
7.设置驱动器状态显示(P0-02为00,就是电机回授脉冲数)8.伺服电机回原点设置参数为:以下参数也可在CANopen Builder软件中设定,一般设定原点回归模式为:模式17。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达A系列伺服电机调试
步骤
The Standardization Office was revised on the afternoon of December 13, 2020
第七轴通过伺服电机运行的调试步骤
一、概述
此文档将介绍如何通过西门子PLC来控制伺服电机的正转、反转、以某一速度进行绝对位置的定位以及电机运行错误后如何复位,伺服驱动器如何设置参数等一些最基本的伺服电机的运行操作步骤。
二、需准备的材料
1、西门子S7-1200系列PLC一台(我们准备的S7-1200 CPU1215C
DC/DC/DC)
2、台达伺服电机ECMA-L110 20RS一台
3、台达伺服控制器ASD-A2-2023-M一台
4、威纶通触摸屏MT-8012IE一台
5、博途V15设计软件
6、威纶通设计软件
三、调试步骤及简单说明
调试之前首先将所有设备按照安装说明书上控制接线部分的介绍正确的接入电源,所有设备中需要特别注意的是伺服控制器的进线是三项220V 的电压。
建议先让伺服电机在无负载的作用下正常运作,之后再将负载接上以免造成不必要的危险,伺服驱动器的控制用CN1信号端口来接线控制(CN1端口如何接线将提供接线图来接线)。
1、伺服驱动器的参数设置
1)、伺服驱动器面板介绍
2)、启动电源面板将显示以下几种报警画面,根据需要将参数调整到位。
画面一:将参数P2-15、P2-16、P2-17三个参数设定为0
画面二:将参数P2-10~P2-17参数中没有一个设定为21 画面三:将参数P2-10~P2-17参数中没有一个设定为23
3)、以上步骤调整好之后可以利用JOG寸动方式来试转电机和驱动器,操作
步骤如下图
4)、JOG模式调试正常后,在通过PLC控制伺服电机运转,需设定以下几个参数用来。
①、P1-01设定成Pt模式 00000
②、P1-00设定成脉冲列+符号 00002
③、P0-02 设置驱动器显示状态监视输入脉冲 01
④、设定电子齿轮比P1-44(分子)和P1-45(分母)
电子齿轮比需计算,计算方式如下:
前提所需条件:
a.产品所要达到的精度要求比如,相当于一个脉冲想走
的距离;
b.行走速度200mm/s,PLC最大发脉冲数2000000*(目前
伺服电机最快20m/min)
c.电机编码器分辨率1280000P/R
d.齿轮分度圆直径
e.减速机速比10
f.m/n电机轴与负载轴的机械减速比
⑤、将P1-44设为8400,P1-45设为3183
⑥、重新启动伺服驱动器,即可。
2、西门子PLC运动控制指令的编写
1)、打开博图V15软件,添加设备
创建新项-然后在跳出的画面左下角点击项目视图
添加新设备根据PLC的型号来选择添加
2)、添加工艺对象进行组态
添加工艺对象-新增对象-填入名称-选择运动控制-点击定位轴(TO_PositioningAxis)
添加轴后在组态里面设置所需设定的参数如下图
驱动器类型选择PTO(脉冲+方向)
扩展参数机械-就按照这个参数不需调整(因为已经把电子齿轮比写入驱动器了)扩展参数位置限制—设定硬件限位开关地址以及电平
动态常规(根据所需设定,加减速时间可以调成,5s时间太长了,停止后还需运行5s)
动态急停—设定的道理跟常规一样,根据所需设定
回原点—主动—输入原点开关地址,然后速度根据需要调整,逼近速度指碰到原点开关前的一个速度,回原点速度是碰到原点开关后的一个运行速度。
2)、添加程序块—添加函数—输入名称—选择语言(LAD)—然后确定
注:语言:LAD L_adder_Logic梯形逻辑;
FBD Function Block Diagram 功能块图编程语言
SCL Structured Control Language 结构化控制语言
3)、程序块添加之后在项目树程序块下双击刚刚建立的程序块Servo Motor—在右边指令表中打开工艺—打开Motion Control(运动指
令),选择你所需要的指令,拖动到程序段中,然后进行编写。
此网址可以查看运动指令的功能介绍
我们目前只用到MC_Power(启用/禁用轴)、MC_Reste(确认错误)、
MC_Home(回原点)、MC_MoveJog(点动运动)、MC_MoveAbsolute(绝对定位),按照运动指令的功能介绍将程序编写完成
4)、将写好的程序放入到主程序块Main中,直接打开主程序块,然后拖
动函数块Servo Motor[FC1]到主程序中。
5)、新增数据块DB_Servo用于保存记录程序中的数据,
3、威纶通触摸屏添加西门子S7-1200PLC操作步骤
1)、打开威纶通触摸屏软件,新建文件选择触摸屏的型号,然后确定
2)、打开软件后跳出系统参数设置画面—新增—设备类型(选择你所用的PLC型号)—接口类型(以太网)—IP地址设定(跟PLC设定相同的地址)—然后导入标签—标签类型如图—确定
导入标签
导入PLC里面的变量和DB数据块
3)、如何设置PLC和将PLC里面的变量和数据块导入出来。
在PLC里面属性设置一下操作
a、PLC属性里面安全与防护点击——访问级别——完全访问权限然后往
下拉,两个参数前面打勾(如下图)
b、在PLC变量里面打开显示所有变量——点击左上角导出的箭头,将变
量导出(可以将导出的文件放到桌面,方便添加)
c、将PLC程序中DB数据块导出来(导出的文件也可放在桌面),右击
DB块——从块生成源——包含所有关联块
d、将导出的文件导入到触摸屏中,文件格式如下图。
4)、PLC添加好之后就可以进行编辑了。