小功率有静差直流调速系统实例分析1
鉴定点小容量晶闸管直流调速系统(用实验装置代)
鉴定点电子线路的安装与调试鉴定要求:1.熟悉元器件的技术参数性能及元件质量好坏检测方法。
2.熟悉电子电路的安装与调试程序。
调试方法:1)调试前的检查根据电路图或接线图从电源端开始,逐步逐段校对电子元件的技术参数是否与电路图相对应;逐步逐段校对连接导线是否正确。
2)调试①静态测量从电源开始测量关键点的直流电压值;测量主要晶体管管脚直流电压值,是否与电路中规定值对应,进一步确定电路的正确性。
②动态测量加入动态信号,用电子仪器进行测量,将测量结果与标准参数对比,进一步调整电路,完善电路的性能。
操作要点提示:(1)认真检查主电路与控制电路接线是否正确,特别注意晶闸管的控制极不要与其他部分发生短路。
(2)控制电路不可用调压变压器作为电源,而主电路在调试时可用调压变压器的低压调试。
(3)调试时应先检查电源的输入情况,再检查电源的输出情况;先调试触发电路,后调试主电路;电源输入电压先低后高,整流输出电流先小后大。
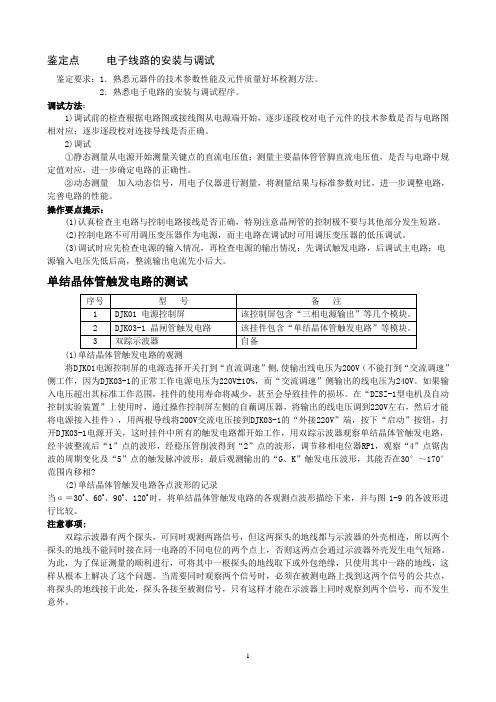
单结晶体管触发电路的测试将DJK01电源控制屏的电源选择开关打到“直流调速”侧,使输出线电压为200V(不能打到“交流调速”侧工作,因为DJK03-1的正常工作电源电压为220V 10%,而“交流调速”侧输出的线电压为240V。
如果输入电压超出其标准工作范围,挂件的使用寿命将减少,甚至会导致挂件的损坏。
在“DZSZ-1型电机及自动控制实验装置”上使用时,通过操作控制屏左侧的自藕调压器,将输出的线电压调到220V左右,然后才能将电源接入挂件),用两根导线将200V交流电压接到DJK03-1的“外接220V”端,按下“启动”按钮,打开DJK03-1电源开关,这时挂件中所有的触发电路都开始工作,用双踪示波器观察单结晶体管触发电路,经半波整流后“1”点的波形,经稳压管削波得到“2”点的波形,调节移相电位器RP1,观察“4”点锯齿波的周期变化及“5”点的触发脉冲波形;最后观测输出的“G、K”触发电压波形,其能否在30°~170°范围内移相?(2)单结晶体管触发电路各点波形的记录当α=30o、60o、90o、120o时,将单结晶体管触发电路的各观测点波形描绘下来,并与图1-9的各波形进行比较。
小直流电机调速实验报告
小直流电机调速实验报告【前言】小直流电机调速是电动机控制的基础,也是电力电子技术中的一个重要实验项目,本实验通过对小直流电动机调速系统的搭建和调试,了解电力电子技术在电动机控制中的应用,提高学生对电动机控制的认识和理解。
【实验目的】1. 熟悉小直流电动机的电路结构和性能特点;2. 掌握控制小直流电机转速的方法;3. 学会使用单相可控硅控制直流电机;4. 掌握直流电动机调速原理及其控制策略;5. 了解直流电动机调速系统的工作流程和控制方法。
1. 小直流电机2. 可控硅触发电路3. 脉冲宽度调制器(PWM)模块4. 直流电源5. 数字万用表小直流电动机调速的基本原理是通过改变电动机的电压和电流来改变转速,实现精度调速。
当调整电动机电源的电压时,电动机转速会相应地变化。
可控硅是被广泛应用的电力半导体器件之一,使用可控硅控制电动机启动和停止,可以实现对电动机的精确控制。
触发电路通过贝尔定律、黎曼和华氏定理结合可控硅的工作原理将正弦波信号转换成脉冲波信号,从而使可控硅转导角度和电流变化。
PWM模块控制可控硅导通时间,间断时间和工作周期,从而实现电机转速的精确调节。
1. 搭建电路:将可控硅触发电路和小直流电动机连接到直流电源上;2. 打开电源开关,将电压调节到合适的值;3. 启动可控硅触发电路,使电机开始运转;4. 使用数字万用表,测量电机运转的转速,记录结果;5. 按照实验要求,改变PWM模块的各种参数,观察电动机转速的变化;6. 记录实验过程和结果,写出实验报告。
【实验结果与分析】通过实验,成功地搭建了小直流电动机调速系统,实现了对电机的转速精确控制。
在调节可控硅导通角度的过程中,电机转速随着导通角度的变化而发生变化,证明控制电机转速的方法是可行的。
在调节PWM模块参数的过程中,也可以看到电机转速的变化。
实验结果表明,小直流电动机调速采用可控硅和PWM模块控制,可以实现高精度、高效率的电机转速调节。
【结论】【改进方向】本实验中使用的是单相可控硅,受限于控制系统的复杂度和硬件成本,只能实现单向控制,控制效果相对较差。
毕业设计论文小功率直流电机调速系统设计

分类号:TM301 U D C:D10621-408-(2012) 2164-0 密级:公开编号:200807143成都信息工程学院学位论文小功率直流电机调速系统设计1小功率直流电机调速系统设计摘要本设计就是基于PWM信号对直流电机进行调速控制,以MC9S12XS128单片机为系统控制的核心,以驱动芯片BTS7960组成电机的驱动模块,并实时的测量电机的实际速度,并把该速度信息在LCD1602上显示,组成了一个小型的闭环的小功率直流电机调速的系统。
为了实现电机调速的稳定和快速,PWM控制方式配合BTS7960电机驱动芯片对小功率直流电机进行驱动和调速是较好的调速系统解决方案。
其中BTS7960内部集成两路H桥式驱动电路。
本系统中利用XS128单片机控制其产生的PWM信号占空比大小,和采用光电码盘采集的电机转速信号来进行调速。
在LCD1602液晶上显示当前转速和设置的转速,将当前转速作为反馈信号与设置转速比较,以确定MC9S12XS128单片机给加速信号还是减速信号,直到两者的速度相等后保持这个速度稳定运行。
在本设计中编写了XS128调速程序、键盘输入程序、测速程序;编写了C51的键盘输入程序、LCD1602显示程序。
经测试,系统调速效果良好,测速比较精确,能够快速的使电机的转速以设定的速度转动。
本设计用的元器件比较少,结构简单,维护方便,便于应用到实际工业生产中。
关键词:单片机;PWM;闭环调速系统;液晶显示The Design Of Low-Power DC Motor Speed Control SystemAbstractThis paper introduces the design of DC motor speed control, which based on the PWM signal. The core of the control system is MC9S12XS128 microcontroller which can drive module that is made of BTS7960 driver chips. The system measures the actual speed of the motor at any time and shows the speed information on the LCD1602. The system is a small, low-power DC motor speed control. In order to make the motor speed stable, the PWM control with the BTS7960 driver chips is a good solution to drive the motor and speed control. The BTS7960 includes the two H-bridge driver circuit. In this system the size of the PWM signal which is controlled by the XS128 microcontroller and the motor speed signal which is acquired from optical encoder controls the speed of motor. LCD1602 displays the current speed and set speed. The system counts the current speed as the feedback signal. The feedback signal is compared to the preset speed, which determines the signal of MC9S12XS128 microcontroller. The signal of XS128 microcontroller is not stop until that the actual speed and the preset speed are same. This system includes XS128 speed control program, the keyboard input program, velocity program; the C51 keyboard input program, the LCD1602 display program. After testing, the system controls the speed of motor well. The measuring speed is more accurate. The system is able to make the motor speed stably rotate in the preset speed. The components which used are not many. The design has a simple structure. The system maintains easily, which is easy to apply it to the actual industrial production.Keywords: Microcontroller; PWM; Closed-loop speed control; LCD目录论文总页数:48页1 引言 (1)1.1课题背景及意义 (1)1.2本课题研究方法和目标 (1)1.2.1 硬件部分 (1)1.2.2 软件部分 (1)1.3主要技术介绍 (2)2 方案研究与主要芯片选择 (2)2.1 总体方案原理及设计框图 (2)2.2 主控芯片的选择与论证 (3)2.3 显示设备的选择与论证 (4)2.4 驱动模块选择 (6)3 硬件电路设计 (7)3.1 单片机控制模块单元电路设计 (7)3.1.1XS128单片机 (7)3.1.2 C51单片机 (13)3.2 驱动控制电路设计 (13)3.3 测速电路设计 (14)3.4 液晶显示电路设计 (14)3.5 电源电路的设计 (16)3.6 按键输入电路的设计 (17)3.7电路总设计 (17)4软件设计 (19)4.1软件设计的总体流程图 (19)4.2各个模块的程序设计 (20)4.2.1 XS128工作的程序设计 (20)4.2.2 按键模块的程序设计 (23)4.2.3 显示模块的程序设计 (24)4.2.4 调速模块的程序设计 (25)5软硬件调试模块 (27)5.1 C51单片机模块程序的调试 (27)5.1.1单片机程序的调试 (27)5.1.2单片机程序的下载 (27)5.2 XS128单片机程序的调试和仿真 (28)5.2.1 XS128程序的调试 (28)5.2软硬件连调中遇到的问题及解决方法 (29)5.3 小功率电机调速系统的使用方法 (30)5.4 调速中的误差的分析 (31)5.5 方案改进 (32)结论 (33)参考文献 (34)致谢 (35)声明 (36)附录 (37)1 引言1.1课题背景及意义在现代的工业生产及应用中,电动机发挥着越来越重要的作用,由电动机和生产机械组成的系统称为电力拖动系统,电动机是其重要的组成器件,电动机的作用是将电能转换为机械能,为生产机械提供动力,是生产机械的原动力,是生产机械的原动机,为生产提供了动力[1]。
小功率直流电机调速综合设计-本科毕业论

电气工程及其自动化专业综合设计(论文)小功率直流调速系统设计DESIGN OF SMALL POWER DC SPEED CONTROL SYSTEM学生姓名严昊学生学号20120501145学院名称信电工程学院专业名称电气工程及其自动化指导教师曹言敬、张旭隆2015年12月25日摘要本文对小功率直流调速系统进行了研究与设计。
首先对单闭环直流调速系统进行了实验建模与实验测试,构建了调速系统的系统框图;然后采用频率法为系统设计超前校正装置, 并使用Matlab计算机仿真软件对系统进行了仿真;最后对校正装置进行了电路设计与制作,对系统进行校正,使系统满足了性能指标要求。
其建模、仿真以及校正网络设计方法简单易行,对研究其他种类的控制系统校正网络具有一定的借鉴作用。
关键词:单闭环调速系统;建模;超前校正;MATLAB仿真目录1 绪论 (1)1.1 设计背景 (1)1.1.1 直流调速系统概述 (1)1.2 自动控制原发展历程 (1)1.3 自动控制校正系统 (1)1.3.1 校正的概念 (1)1.3.2 校正的方式 (2)2 设计任务 (3)2.1 设计的详细任务 (3)2.2 设计要求 (3)3 调速系统设计 (4)3.1 单闭环调速系统原理 (4)3.1.1 调速系统原理 (4)3.1.2 控制结构图 (4)3.2 各部件相关参数选择 (4)3.2.1 V-M系统介绍 (4)3.2.2 比例放大器 (5)3.2.3 整流电路:采用三相桥式全控整流 (6)4 调速系统的调速指标 (7)4.1 参数计算 (7)4.1.1 转速控制闭环调速系统的调速指标 (7)4.1.2 闭环调速系统的静特性 (8)4.2比例放大器 (8)4.3 额定励磁下直流电动机参数 (9)4.4 误差分析 (10)5系统部件特性测试 (13)5.1主要设备仪器 (13)5.2功率放大器特性测定 (13)5.3电动机的传递函数 (13)5.4 电动机死区电压Ui测定 (14)5.5 电动机时间常数Tm测定 (14)5.6 电动机传递系数Km测定 (14)6 matlab软件仿真 (15)6.1原系统的闭环阶跃响应 (15)6.2 系统校正设计 (15)6.3 校正后的系统框图 (16)结论 (18)致谢 (19)参考文献 (20)1 绪论1.1 设计背景1.1.1 直流调速系统概述从生产机械要求控制的物理量来看,电力拖动自动控制系统有调速系统、位置随动系统、张力控制系统等多种类型,而各种系统往往都是通过控制转速来实现的,因此调速系统是最基本的拖动控制系统。
小功率有静差直流调速系统的分析

案例七: 小功率有静差直流调速系统的分析图4-1 KZD-Ⅱ型小功率直流调速系统线路图1.系统结构特点和技术数据此为小容量晶闸管直流调速装置,适用于 4kW 以下直流电动机无级调速(调速范围 D≥10∶1,静差率 s≤10%)。
装置的电源电压为 220V 单相交流,输出电压为直流 160V,输 出最大电流 30A;励磁电压为直流 180V,励磁电流为 1A。
系统主要配置 Z3 系列(电枢电压 160V,励磁电压 180V)的小型直流他励电动机。
装置的主回路采用单相桥式半控整流线路。
具有电压负反馈、电流正反馈和电流截止负反馈环节。
图4-2 KZD-Ⅱ型直流调速系统的组成框图2.定性分析对实际系统分析,一般是先定性分析,后定量分析。
即先分析各环节和各元件的作用, 搞清系统的工作原理。
然后再建立系统的数学模型,进一步作定量分析。
分析晶闸管调速系统线路的一般顺序是:主电路→触发电路→控制电路→辅助电路(包 括保护、指示、报警等)。
现依次分析如下:① 主电路中主电路中桥臂上的两个二极管串联排在一侧,这样它们可以兼起续流二极管(Free- Wheeling diode)的作用,但这样两个晶闸管阴极(Cathode)间将没有公共端,脉冲变压器 (Pulse Transformer)的两个二次绕组间将会有 220 2´ 的峰值电压(Peak Voltage)。
因此 对两个二次绕组间的绝缘(Insulation)要求也要提高。
在要求较高、或容量稍大(2.2kW 以上)的场合,应接入平波电抗器 Ld,以限制电流脉 动(Pulsation),改善换向条件,减少电枢损耗,并使电流连续。
但接入电抗器后,会延迟 晶闸管掣住电流(Latching Current)的建立,而单结晶体管张弛振荡器脉冲的宽度是比较窄 的,为了保证触发后可靠导通,在电抗器 Ld 两端并联一个电阻(1kΩ),以减少主电路电流 到达晶闸管所需要的掣住电流的时间。
直流自动调速系统实验
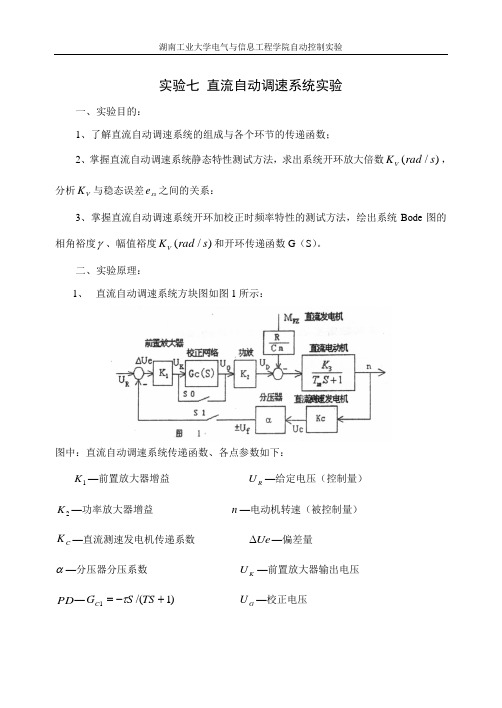
实验七 直流自动调速系统实验一、实验目的:1、了解直流自动调速系统的组成与各个环节的传递函数;2、掌握直流自动调速系统静态特性测试方法,求出系统开环放大倍数)/(s rad K V ,分析V K 与稳态误差ss e 之间的关系:3、掌握直流自动调速系统开环加校正时频率特性的测试方法,绘出系统Bode 图的相角裕度γ、幅值裕度)/(s rad K V 和开环传递函数G (S )。
二、实验原理:1、 直流自动调速系统方块图如图1所示:图中:直流自动调速系统传递函数、各点参数如下:1K —前置放大器增益 R U —给定电压(控制量)2K —功率放大器增益n —电动机转速(被控制量)C K —直流测速发电机传递系数Ue ∆—偏差量α—分压器分压系数K U —前置放大器输出电压PD —)1/(1+-=TS S G C τG U —校正电压PI —BTS S K G C /)1(42τ+-= D U —直流电动机电枢电压PID —)()()(21S G S G S G C C C +=FZ M —干扰信号(负载转矩)13+S T K m —直流电动机传递函数C U —反馈电压R —电枢回路等效电阻f U —反馈电压Cm —电动机的转矩常数 2.直流电动调速控制系统抗干扰的物理过程: 直流电动机的机械特性 Φ-=e aa D C R I U n闭环控制系统,抗干扰的顺序过程是:在干扰信号FZ M 的作用下(FZ M 的数值下降),使系统直流电动机的转速n 上升、测速发电机电压C U 上升、负反馈电压f U 上升、在给定电压R U 不变的情况下偏差电压)(Ue U U Ue f R ∆=-∆下降。
由直流电动机机械特性的公式知道,在其它参数不变的条件下,加在电枢两端的电压D U 下降,使直流电动机的转速下降,闭环控制系统靠这样的顺序过程实现自动调速的。
同理得出结论,闭环系统能够有效地抑制一切被包围在反馈环内的扰动作用。
小容量晶闸管直流调速系统的分析与排故
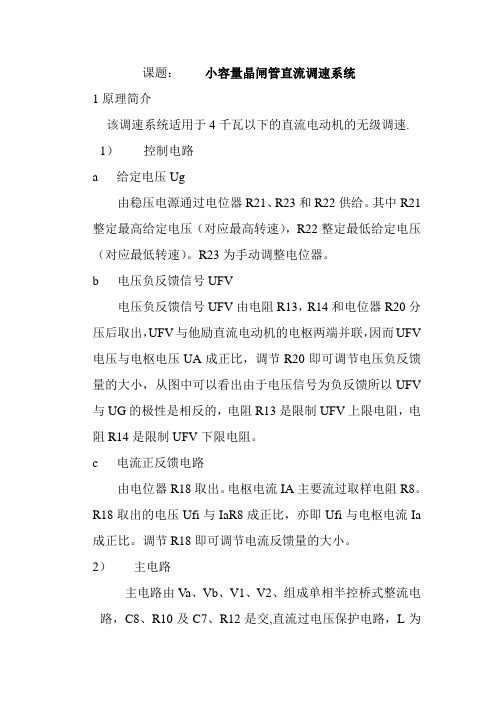
课题:小容量晶闸管直流调速系统1原理简介该调速系统适用于4千瓦以下的直流电动机的无级调速. 1)控制电路a 给定电压Ug由稳压电源通过电位器R21、R23和R22供给。
其中R21整定最高给定电压(对应最高转速),R22整定最低给定电压(对应最低转速)。
R23为手动调整电位器。
b 电压负反馈信号UFV电压负反馈信号UFV由电阻R13,R14和电位器R20分压后取出,UFV与他励直流电动机的电枢两端并联,因而UFV 电压与电枢电压UA成正比,调节R20即可调节电压负反馈量的大小,从图中可以看出由于电压信号为负反馈所以UFV 与UG的极性是相反的,电阻R13是限制UFV上限电阻,电阻R14是限制UFV下限电阻。
c 电流正反馈电路由电位器R18取出。
电枢电流IA主要流过取样电阻R8。
R18取出的电压Ufi与IaR8成正比,亦即Ufi与电枢电流Ia 成正比。
调节R18即可调节电流反馈量的大小。
2)主电路主电路由Va、Vb、V1、V2、组成单相半控桥式整流电路,C8、R10及C7、R12是交,直流过电压保护电路,L为平波电抗器,能限制电流脉动,改善换向条件,减少电枢损耗,并使电流连续,L两端的电阻R11能保证可靠触发,并且在主电路突然断路时,为电抗器提供放电回路,减少电抗器产生的过程.工作过程中只要给VSA、VSB加入尖顶脉冲信号晶闸管就能导通,电动机就能启动运行,因为采用桥式整流电路,故工作时VSA、VSB是轮流导通的的,改变晶闸管门极的脉冲相位,就可以实现对电动机的调速控制。
为了加快制动和停车,采用了能耗制动,R9为能耗制动电阻.电动机励磁由单独的整流电流VC3供电.为了防止失磁而引起的飞车事故,在励磁电路中串入电流继电器KA,只有当励磁电流大于某数值时,KA才动作.在主电路的接触器KM的控制回路中,串接KA常开触头.KA的动作电流可通过分流电位器R17来调整.钮子开关SB是调速系统的启动开关。
3)触发电路由单结晶体管VS为核心组成张弛振荡器,R15为输出电阻,R2为温度补偿电阻。
直流调速控制系统的分析及仿真
当电流负反馈环节起主导作用时的自动调节过程如图7-1-8所示。
7.1.4系统的性能分析
代入图7-1-5中,由图可见,它是一个二阶系统,已知 二阶系统总是稳定的。但若考虑到晶闸管有延迟,晶 闸管整流装置的传递函数便为
相反。
5.电流截止负反馈环节
当 时,(亦即 ),则二极管VD截止,电流截止负反馈不起作用。当 时,(亦即 ),则二极管VD导通, [此处略去二极管的死区电压],电流截止负反馈环节起作用,它将使整流输出电压 下降,使整流电流下降到允许最大电流。 的数值称为截止电流,以 表示。调节电位器RP3即可整定 ,亦即整定 的数值。一般取 〔 为额定电流〕。 由于电流截止负反馈环节在正常工作状况下不起作用,所以系统框图上可以省去。
在图7-1-1中,主电路中串联了一个阻值很小的取样电阻
(零点几欧)。电阻
上的电压
与
成正比。比 较阈值电压
是由一个辅助电源经电位器RP3提供的。电 流反馈信号(
图7-1-7调速系统的“挖土机”机械特性
当电流负反馈环节起主导作用时的自动调节过程如图7-1-8所示。 机械特性很陡下垂还意味着,堵转时(或起动时)电流不是很大。 这是因为在堵转时,虽然转速n=0,反电动势E=0,但由于电流 截止负反馈的作用,使
大大下降,从而
不致过大。此时 电流称为堵转电流
⑥ 晶闸管整流电路的调节特性为输出的 平均电压
与触发电路的控制电压
之间的关系,即
图7-1-4为晶闸管整流装置的调节特性。
由图可见,它既有死区,又会饱和。 (当全导通以后,
再增加, 也不会再 上升了),且低压段还有弯曲段。面对 这非线性特性,常用的办法是讲它“看 作”一条直线,即处理成
为
小功率直流电机调速电路的设计_毕业设计 精品推荐

《电子技术基础》课程设计报告书课题名称小功率直流电机调速电路的设计姓名学号专业机械设计制造及其制动化指导教师目录1,设计的任务及要求 (1)2,电路图的设计与确定 (2)3,取样电路部分的理论计算............................................................................ 4,减法电路部分的理论计算............................................................................ 5,电流驱动部分的理论计算............................................................................ 6,电压比较部分的理论计算............................................................................ 7,系统电路总图................................................................................................ 8,电源参数的选择............................................................................................ 9,经验体会........................................................................................................ 附录:原器件清单............................................................................................小功率直流电机调速电路的设计摘要:基于模拟电子技术的学习,通过模拟电子技术课程设计,培养理论联想的能力。
直流调速系统原理(高教知识)

全面分析
16
线性放大区
晶闸管整流电路的调节特性
为输出的平均电压 U c与触发 电路的控制电压 U d之间的关
ud Ud0
Ud1
Ud2
α1 τ0 Uc
t1 t2
t3
全面分析
18
综上所述,晶闸管触发可控整流装置的传递函数可
以看成是由两个环节串联组成的。即:可以把它的 触发电压Uc与整流输出电压Ud之间的放大系数K 视为常数,而把晶闸管电路和整流装置可以看成是 一个具有纯滞后环节放大环节。这样就有:
Gk (s) K se0s
Ufn
全面分析
29
在如图所示的调速系统中,已知负载变化为: T (s) 20
求:负载变化所产生的转速降。
s
若此时系统的给定量为: 态输出nN。 该系统是否能满足5%的静差率。
,此时U系n (统s) 的 1稳s0
Un(S)
+
5
-
G1
T(s),负载变化
+
40 + 0.005s 1
8.33
N(S)
(0.1s 1)(0.02s 1)
测速电机
全面分析
电流 载止 比较 电路
20
比较放大电路(Amplifier)
由叠加定理:当Us(s)单独作用 时,有:
U
' k
(s)
Us (s)
R1 R2
U
' k
R1 R2
直流调速系统 详解
下篇 自动控制系统第六章 晶闸管直流调速系统本章要点本章主要叙述晶闸管单闭环直流调速系统和双闭环直流调速系统的组成、工作原理和自动调节过程,并通过典型实例来阐述定性分析自动控制系统的方法。
同时对可逆调速系统也作了介绍。
第一节 直流调速系统的基本概念电气传动主要分为直流电气传动和交流电气传动两大类,它们分别采用直流、交流电动机为动力的传动。
直流电动机虽不如交流电动机结构简单、制造方便、维护容易、价格便宜等,但是由于直流电动机具有良好的起动、制动性能和调速性能,可以方便地在很宽的范围内平滑调速,因此在轧钢机、矿井卷扬机、挖掘机、大型起重机、金属切削机床、造纸机等调速性能要求较高的电力拖动领域中得到了广泛应用。
近年来,交流调速系统发展很快,而直流调速系统在理论和实践上都比较成熟,并且从反馈闭环控制的角度来看,它又是交流调速系统的基础。
所以掌握好直流调速系统是很重要的。
6.1.1 直流调速系统的调速方法直流他励电动机的转速公式可用下式表示φe d d d K R I U n -= 式中 n ——转速;单位r/min 。
U d ——电枢电压;I d ——电枢电流;R d ——电枢回路电阻;φ——励磁磁通;K e ——由电动机结构决定的电动势系数。
由此可见,直流电动机的调速方法有三种:(1)改变电枢电压——调压调速。
(2)改变电枢回路电阻——串电阻调速。
(3)改变励磁磁通——弱磁调速。
对于要求在一定范围内无级平滑调速的系统来说,以调节电枢电压方式为最好,调压调速是调速系统采用的主要调速方式。
6.1.2 直流调速系统的供电方式调节电动机的电枢供电电压需要有专门的可控直流电源。
早在20世纪40年代,采用电动机—发电机机组(又称放大机控制的发电机—电动机组系统)向直流电动机供电。
但它的缺点是占地大,效率低,运行费用昂贵,维护不方便等。
为了克服这些缺点,50年代开始使用水银整流器作为作为可控变流装置。
其主要缺点是污染环境,危害人体健康。
情境一 KZD-Ⅱ型小功率有静差单闭环直流调速系统的调速

任务2:转速负反馈有静差单闭环直 流调速系统
2.1单闭环有静差调速系统的组成及其静特性
2.1.1 单闭环有静差调速系统的组成
由上图可见,该系统的控制对象是直流电动 机M,被控量是电动机的转速n,晶闸管触发及 整流电路为功率放大和执行环节,由运算放大器 构成的比例调节器为电压放大和电压(综合)比较 环节,电位器RP1为给定元件,测速发电机TG 与电位器RP2为转速检测元件。该调速系统的组 成框图如下:
情境一 KZD-Ⅱ型小功率有静 差单闭环直流调速系统的调速
任务1:单闭环直流调速系统概述
1.1直流调速系统概述
1.1.1调速的定义
所谓调速是指在某一具体负载情况下,通 过改变电动机或电源参数的方法,使机械特性 曲线得以改变,从而使电动机的转速发生变化 或保持不变。即调速包含两方面:其一,在一 定范围内变速,其二,保持稳速。
2.1.2 特点: 1.把转速反馈与给定比较形成控制信号, 组成闭环控制; 2.测速环节:直流测速发电机,与直流电 机同轴联结; 3.设置放大器。
。
2.1.3 自动调节过程: 闭环系统能够减少稳态速降的实质在 于它的自动调节作用,在于它能随着负载 的变化而相应地改变整流电压,而开环系 统不能自动调节。以负载增大为例,闭环 调速系统的自动调节过程如下:
转速负反馈有静差单闭环直流调速系统流调速系统21单闭环有静差调速系统的组成及其静特性211单闭环有静差调速系统的组成由上图可见该系统的控制对象是直流电动机m被控量是电动机的转速n晶闸管触发及整流电路为功率放大和执行环节由运算放大器构成的比例调节器为电压放大和电压综合比较环节电位器rp1为给定元件测速发电机tg与电位器rp2为转速检测元件
Cf
U
8
Ui
优化小功率有静差直流调速电路的方案

优化小功率有静差直流调速电路的方案优化小功率有静差直流调速电路的方案一、引言在现代工业领域,直流电机广泛应用于机器人、风力发电、自动控制系统等领域。
而直流电机的调速技术对于提高动力系统的效能、节约能源和实现精密控制起着关键作用。
而在直流电机调速系统中,直流调速电路是至关重要的一部分,影响着整个系统的性能和稳定性。
然而,在小功率有静差直流调速电路中,由于电路复杂性和误差积累等问题,提高其性能和精度一直是一个挑战。
本文将从多方面对优化小功率有静差直流调速电路的方案进行讨论,以期为工程实践提供一些有益的参考。
二、小功率有静差直流调速电路的问题在传统的小功率有静差直流调速电路中,存在着以下几个问题:1. 静差问题:小功率有静差直流调速电路中的静差主要指转速的偏差,即电机在无负载情况下没有转动,需要一定的转矩才能启动。
静差的存在会影响电机的启停、速度精度和响应时间。
2. 调速精度问题:由于电路中的误差和噪声等原因,小功率有静差直流调速电路的调速精度较低,难以满足一些精密控制的要求。
3. 效率问题:小功率有静差直流调速电路中的电源转换效率较低,会导致能源的浪费,并增加电路的发热量。
三、优化方案为解决上述问题,改善小功率有静差直流调速电路的性能和精度,可以采取以下优化方案:1. 采用高精度传感器:通过选择精度高的传感器,可以提高调速系统的灵敏度和精度。
传感器的选择应根据具体情况,如速度范围、环境要求等进行合理选择。
2. 使用PWM技术:脉冲宽度调制(PWM)技术可以通过改变占空比来控制电机的转速。
采用PWM技术可以提高调速系统的响应速度和精度。
3. 增加反馈环节:引入合适的反馈环节可以提高调速系统的稳定性和抗干扰能力。
常用的反馈环节包括速度环和电流环。
通过合理的参数设置和滤波器设计,可以实现更好的调速效果。
4. 优化功率放大器:功率放大器是控制电机运行的关键组成部分。
优化功率放大器的设计可以提高电路的效率和功率输出能力。
一款新颖的小功率直流电机调速电路

一款新颖的小功率直流电机调速电路本文介绍的小功率直流电机调速电路具有电路新颖、调试方便、调速范围宽及转差率低等特点。
适合各种要求调速精度较高的生产机械设备用。
电路如图1-18所示。
电路工作原理主电路直接输人220V交流,经晶闸管半控桥整流后供给电机电枢。
整流后的电压较高,适合额定电压为150至180V功率小于2kw的直流电机。
这里晶闸管T1和二极管v3及T2和v4采用电力半导体半臂电桥模块。
直流电机的励磁绕组L2由二极管V1、V2及借用电枢回路的V3、V4组成的整流桥供电,节省了两只二极管。
为确保晶闸管关断时,电枢电流连续且平滑,在主电路中接入了续流二极管V5及平波电抗器L1。
(1)同步电压的获取及脉冲触发电路:一般单相半控桥整流电路均采用单结晶体管触发方式,同步信号采用稳压二极管稳压后的削波电压,缺点是触发脉冲的移相范围减小。
本电路采用电源的过零点时刻作为同步信号,同步范围可图1:一款新颖的小功率直流电机调速电路达170°以上。
由二极管V1、V2、V3、V4整流桥输出的单相脉动直流电压一路经电阻R12、R13分压,ZD2稳压获得22V的直流电压作为触发电路等的工作电源,另一路经R21、R22分压送至三极管BG6的基极。
每当电源过零时BG6吼截止,而BG4、BG5饱合导通,BG4将电容c12短接以保证在任意电源半周都是从零点开始充电,B 炕集电极输出的低电平信号使IC1复位,其(3)脚输出低电平以保证晶闸管的触发信号在任意电源半周期内都以电源过零点作为基准。
三极管BG3的集电极电流为C12充电,当BG1管导通时C12放电使三极管BG2饱和导通,集电极输出的低电平使IC1置位,其(3)脚输出高电平,经沧电藕合器输出触发脉冲送至晶闸管的门极。
这里时基电路SE555的作用是加大脉冲宽度,脉冲宽度值由R6、C7的充电时间常数决定。
光电祸合器的作用是增大脉冲幅度,以确保晶闸管可靠触发导通。
(2)给定和反馈控制:为提高电机的机械特性硬度和减小转差率,该电路增加了电压负反馈和电流正反馈控制,给定电位器RP3和电压取样电位器RP1、电流取样电位器RP2共同控制三极管BG3的导通程度,从而控制BG3的集电极电流,使负载发生变化时触发脉冲的相位随之变化,电机转速得以基本恒定。
无超调小功率直流调速系统设计

无超调小功率直流调速系统设计无超调小功率直流调速系统设计随着自动化技术的发展,电机调速系统已经成为了现代工业生产中不可或缺的一部分。
为了适应生产工艺的需要,在工业控制中经常需要实现电机的精确调速,而直流调速系统是比较常见的一种技术方案。
其中无超调小功率直流调速系统具有结构简单、调速控制精度高等特点,被广泛应用到电动机调速系统中。
无超调小功率直流调速系统的主要组成部分包括电机、直流电机调速器以及电压源等。
电机是调速系统的传动核心,而调速器则是实现电机调速的核心部分。
电压源则是为调速器提供必需的电力,是调速系统无法运行的代价。
因此,在设计无超调小功率直流调速系统时,应该充分考虑这些组成部分之间的关联关系,以确保系统能够良好运行,同时保证系统的可靠性和安全性。
在调速器选择方面,无超调PID调速器是目前常用的技术方案之一。
该调速器采用比例、积分、微分三项控制算法,通过对电机转速的反馈进行误差修正,以确保电机达到预定的转速值。
相比其他技术方案,无超调PID调速器对电机调速响应速度更快,调节精度更高。
在无超调小功率直流调速系统的设计过程中,电压源的选择同样至关重要。
电压源应选用满足系统要求的高质量的DC电源,以确保直流调速器获取到充足的电力,为电机提供平稳的运行电流。
同时,应该在电路中设置过流和过压保护器件,以确保电路的稳定和安全运行。
当电机调速实现后,应该进行参数调整以达到最佳效果。
各项参数的调节需要综合考虑电机本身的结构特点、要求的转速范围和负载情况等因素,以确保系统达到最佳的性能表现。
其中,比例系数和积分时间常数的设置会直接影响系统的抗干扰能力和稳态误差,而微分时间常数则会影响系统动态响应特性。
除此之外,整个系统的接线方式和物理布局同样需要注意。
电路应该采用简洁、合理的方式进行接线,以便排除可能导致电路故障的可能源。
物理布局方面应注意避免可能的电磁干扰和电磁波辐射,确保系统的稳定性和安全性。
总之,无超调小功率直流调速系统是电机调速领域中一种比较常见的技术方案,具有应用范围广、结构简单、调速控制精度高等特点。
小功率直流调速系统设计
摘要本次课程设计基于PWM技术实现了对小功率直流电机的转速调节。
以51系列单片机为控制核心,组成了包括转速调节、转速设置、转速测量和显示等功能的闭环调速系统。
为了实现对转速的灵活控制和高效节能,PWM控制方式配合L298N电机驱动芯片对小功率直流电机进行驱动和调速是较好的调速系统解决方案。
并在数码管上显示当前转速和设置的转速,将当前转速作为反馈信号与设置转速比较,以确定加速还是减速,直到两者相等后保持这个速度稳定运行。
随着我国经济和文化事业的发展,在很多场合,都要求有直流电机PWM调速系统来进行调速,诸如汽车行业中的各种风扇、刮水器、喷水泵、熄火器、反视镜、宾馆中的自动门、自动门锁、自动窗帘、自动给水系统、柔巾机、导弹、火炮、人造卫星、宇宙飞船、舰艇、飞机、坦克、火箭、雷达、战车等场合。
在本设计中编写了调速运算、测速、显示、键盘输入等子程序,充分发挥了直流电机的优良的调速性能。
各部分功能完整,构成了多功能自动化的闭环调速系统。
实测调速效果良好,测速精确,能迅速地调节转速到设定转速稳定运行。
该设计具有元件较少,结构简洁,维护方便,经济实用,和很好的适应性等特点。
关键词单片机;直流斩波;PWMAbstractThe curse design is about low-power DC motor speed regulation based on PWM technology. The MCS-51 series single-chip microcontroller, as the core component, is designated to take charge of the speed adjustment, setting, measurement and display which is necessary for a closed loop system. An excellent solution has been worked out by using PWM technology combined with L298N motor driver IC as a low-power DC motor driver, in order to achieve the flexible speed control and improve energy efficiency. Therein, DC chopper consist of the L298N which contains two H-bridge circuits, PWM signals and DC motors. The PWM signal’s Duty cycle is adjusted by the single-chip Micro-controller. The motor’s speed is measured by an infrared tube and an infrared receiver, and then the result of measurement is compared with the setting value. In this case, the speed can be increased or reduced according to the comparison until the two speeds above come to the same value. In this project, programming is very important to achieve these functions such as the speed regulation, measurement, display, and keyboard input. Bugs and logic faults are corrected when the development of system is finished. Based on the studying above, this system has been proved to be convenient to maintain and easy to operate with a few components and excellent adaptability.Key words MCU PWM Closed Loop Speed Control System DC Chopper目录摘要 (I)Abstract (II)1 绪论 (1)1.1课题背景及意义 (1)1.2本课题研究方法和目标 (1)2调速系统原理 (2)2.2 直流调速主要技术介绍 (2)2.2.1 直流斩波器介绍 (2)2.2.2 PWM调速系统的优点 (3)3方案研究与主要芯片选择 (4)3.1总体方案原理及设计框图 (4)3.2 PWM产生方式 (4)3.3 电机驱动方式 (6)3.4 其他芯片选择 (6)4硬件电路设计 (7)4.1 主要芯片介绍 (7)4.2 电机驱动电路设计 (11)4.3 PWM信号产生电路设计 (12)4.4 电机转速测量电路设计 (13)4.5 显示电路设计 (13)4.6 电源电路设计 (14)4.7 总电路及设计 (15)5软件设计 (16)5.1 部分程序流程图 (16)5.2主要芯片编程操作方式 (16)5.3 部分主要程序功能说明 (17)结论 (20)致谢 (21)参考文献 (22)附录 (23)1 绪论1.1课题背景及意义直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
有静差直流调速系统

有静差直流调速系统高级维修电工考证复习之一一、直流调速系统1.直流调速系统概述直流调速有三种方法:○1电枢回路串电阻调速———(有级调速)○2弱磁调速(调磁调速)——(无级调速)○3调压调速————————(无级调速)其中调磁调速为恒功率调速,其调速范围小;调压调速为恒转矩调速,其调速范围大。
在低于额定转速的调速一般采用调压调速,在高于额定转速的调速一般采用调磁调速。
采用调压调速的直流调速系统需要一个可控直流电源为直流电动机供电。
常用的可控直流电源有:○1旋转变流机组(发电机G—电动机M调速系统)○2静止式可控整流器(晶闸管相位控制直流调速系统)○3直流斩波器(直流斩波器调速系统)晶闸管相位控制直流调速系统与直流斩波器调速系统的共同优点是:调速范围宽,可获得较硬的机械特性。
发电机—电动机(G—M)调速系统与晶闸管相位控制直流调速系统、直流斩波器调速系统相比,后两种调速系统具有○1放大倍数大○2快速性能好○3经济性好○4体积小○5控制方便○6运行噪声小等优点。
晶闸管相位控制直流调速系统与直流斩波器调速系统相比,前者又具有○1功率器件少○2线路简单○3调速范围宽○4快速反应好○5功率因数和效率高。
但受器件容量等因素的限制,主要用于中、小功率范围的系统。
在工业生产中,早期应用的是发电机——电动机(G—M)调速系统,随着电子技术的发展,晶闸管相位控制直流调速和直流斩波调速系统获得越来越广泛的应用。
目前应用最广泛的还是晶闸管相位控制直流调速系统。
晶闸管直流调速系统的种类很多,根据系统运行时是否存在稳态偏差,可分为:○1有静差直流调速系统○2无静差直流调速系统根据系统中负反馈环节的数量,可分为:○1单闭环直流调速系统○2双闭环直流调速系统○3多闭环直流调速系统根据系统中电动机是否正、反转,可分为:○1可逆直流调速系统○2不可逆直流调速系统2.直流调速方式根据全电路欧姆定律来分析下列他励直流电动机:Ud = Ed + IdRd Ud ——电动机的电枢Ed = Ce Фn Ed ——电动机分电动势T = Ct ФId T ——电动机的电磁转矩Rd ——电枢绕组Ct ——电动机的转矩常数Ф ——主磁极磁通机械特性为002Ud Rd nn KtT n n Ce CeCt 0/n Ud Ce ——理想空载转矩2/Kt Rd CeCt ——机械特性斜率 2/n RdT CeCt ——转速降落值由上式可知,直流电动机的速度由Ud (电枢两端电压)和Ф(主磁极磁通)所决定。
小功率直流调速系统
课程设计(论文)题目: 小功率直流调速系统设计带电流变化率内环的三环系统设计学生姓名:王尼玛专业:自动化(工程)学号: 52525222 班级:自动化22指导教师: poslty成绩: A工程技术学院2012 年 1 月摘要实际的多环调速系统种类繁多,转速一电流双闭环直流调速系统是性能较好、应用最广的直流调速系统。
转速一电流双闭环调速系统在启动过程中,依靠电流环的恒流调节作用,可保持启动电流为最大允许电流值,使系统以最大加速度上升,实现系统的快速性。
但与此同时也存在着诸多问题,例如启动开始时,转速调节器立即达到饱和,电流调节器的给定值很大,而晶闸管整流装置本身的惯性又较小,故电流上升率很高,这使直流电动机的换向条件恶化。
此外,对机械传动机构也会产生很强的冲击,因此要求限制最大电流变化率,而如果用延缓电流环的跟随作用来压低电流变化率,又会影响系统的快速性。
解决转速~电流双闭环存在的以上问题的最好方法,就是使系统在最大允许电流和最大允许电流变化率的条件下实现最快控制,即在电流环内设置电流变化率内环,构成带电流变化率内环的三环调速系统。
关键词电流变化率转速目录摘要 (II)1 课程设计内容及技术指标 (1)1.1设计内容 (1)1.2性能技术指标 (1)2 系统组成及工作原理 (2)2.1 对象模型及参数的确定 (2)2.1.2直流电动机的参数测定: (2)2.2系统组成 (2)2.3工作原理简述 (4)2.3.1电流变化率环节简介 (4)2.3.2电流调节器的构成 (5)2.3.3转速调节器(ASR) (6)2.3.4转速环PI调节器部分参数计算 (6)3 仿真与调试 (8)3. 1 系统Simulink仿真图 (8)3.2 系统仿真 (8)3.2.1 电流内环的调试 (9)3.2.2电流变化率环的调试 (9)3.2.3 转速外环的调试 (10)4 总结 (11)4.1设计过程总结 (11)4.2 存在的问题和可能解决的方法 (11)致谢 (12)参考文献 (13)1 课程设计内容及技术指标1.1设计内容1. 设计实验内容及步骤,测定直流电机各参数,包括电枢回路电阻、电感、电磁时间常数及机电时间常数;2. 按可逆调速的要求,选择直流电源的形式,给出电路图及输出波形图;不要求对具体的元件型号及参数进行选择,也不要求对电源本身的控制电路(如可控硅整流的触发电路与PWM整流的驱动电路)及相关的保护电路进行选择;3. 按各分组中性能指标的要求,设计转速、电流双闭环系统(或相应的三环系统),给出系统的原理图及动态结构图;利用静态特性图确定反馈系数及各环节增益;利用动态结构图进行校正,确定各调节器(控制器)的结构与参数;4. 利用matlab进行仿真调试,观察系统起动过程中(即阶跃响应)转速误差、电流误差、电枢回路电流及转速的变化曲线,对参数进行适当调整,直至满足性能指标要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小功率有静差直流调速系统
实例分析
李昕
一、系统的技术数据和结构特点
1.适用于4KW以下直流电动机的无级调速(调速范围D≤10:1,静差率
S≤10%);为小容量晶闸管直流调速装置。
2.电源电压:220V单相交流;
输出电压:直流160V,输出最大电流:30A;励磁电压:直流180V,励磁电流为1A。
3.配置Z3系列小型直流他励电动机;主回路采用单相桥式半控整流线
路。
4.具有电压负反馈、电流正反馈和电流截止负馈环节。
F.SA:手动转换开关(起动用);KM:主电路接触器;主回路保护用熔断器容量为50A。
D.平波电抗器Ld及并联的电阻R:Ld是限制电流脉动,使电流连 续,改善换向条件,减少电枢损耗。
R可避免触发电路触发功率小
使晶闸管不能可靠触发导通,同时减小电抗器产生的过电压。
E.R9:能耗制动电阻(两只25W、51Ω线绕电阻器并联);RS:电流表分流器。
RC阻容吸收电路:吸收浪涌电压。
G.欠电流继电器KA:防止失磁造成“飞车”事故。
2.触发电路
采用由单结晶体管V3构成的张驰振荡电路,以放大管V2控制电容
C1的充电电流。
V5为功放管;T为脉冲变压器;VD5为隔离二极管,可增加触发脉冲前沿陡度,并阻挡C6上的电压影响V3同步。
3.放大电路
由晶体管V1和电阻R4、R5构成的放大器为电压放大电路。
信号在V 1基极综合。
VD 6、VD 7构成正反向限幅电路。
VD4为隔离二极管以隔离电容C 4对同步电压的影响。
4.控制电路
(1)反馈量的选择
TL增加时,与转速n降低相对的是电压Ud 的降低和电流Id 的上升,因此,可间接用电压负反馈和电流正反馈环节替代转速负反馈。