典型系统动态性能和稳定性分析
华南农业大学自动控制实验三典型三阶系统动态性能和稳定性分析
题 目实验三 典型三阶系统动态性能和稳定性分析年级专业班级组别姓名(学号)日期实验三 典型三阶系统动态性能和稳定性分析一、实验目的1.学习和掌握三阶系统动态性能指标的测试方法。
2.观察不同参数下典型三阶系统的阶跃响应曲线。
3. 研究典型系统参数对系统动态性能和稳定性的影响。
二、实验内容观测三阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
三、实验原理任何一个给定的线性控制系统,都可以分解为若干个典型环节的组合。
将每个典型环节的模拟电路按系统的方框图连接起来,就得到控制系统的模拟电路图。
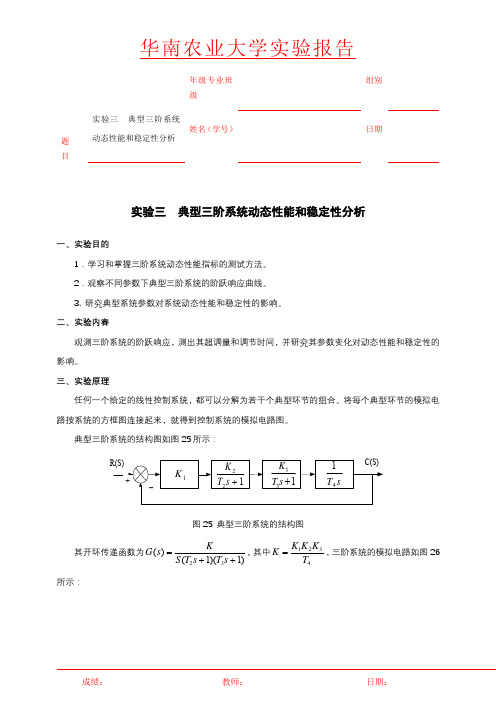
典型三阶系统的结构图如图25所示:图25 典型三阶系统的结构图其开环传递函数为23()(1)(1)K G s S T s T s =++,其中1234K K KK T =,三阶系统的模拟电路如图26所示:题目实验三典型三阶系统动态性能和稳定性分析年级专业班级组别姓名(学号)日期图26三阶闭环系统模拟电路图模拟电路的各环节参数代入G(s)中,该电路的开环传递函数为:SSSKSSSKSG++=++=236.005.0)15.0)(11.0()(该电路的闭环传递函数为:KSSSKKSSSKS+++=+++=236.005.0)15.0)(11.0()(φ闭环系统的特征方程为:06.005.0,0)(123=+++⇒=+KSSSSG特征方程标准式:032213=+++aSaSaSa根据特征方程的系数,建立得Routh行列表为:6.005.06.06.0105.012331321131223KSKSKSSaSaaaaaSaaSaaS-⇒-为了保证系统稳定,劳斯表中的第一列的系数的符号都应相同,所以由ROUTH 稳定判据判断,得系统的临界稳定增益K=12。
⎪⎩⎪⎨⎧>>-6.005.06.0KK题目实验三典型三阶系统动态性能和稳定性分析年级专业班级组别姓名(学号)日期即:⎪⎩⎪⎨⎧<⇒>=⇒=Ω>⇒<<系统不稳定系统临界稳定系统稳定41.7KΩR12K41.7KΩR12K7.4112KKR三、实验步骤1、按照实验原理图接线,设计三阶系统的模拟电路2、改变RX的取值,利用上位机软件仿真功能,获取三阶系统各种工况阶跃响应曲线。
机械工程控制基础实验指导书
《机械工程控制基础》实验指导书青岛科技大学前言机械工程控制基础是针对过程装备与控制工程专业而开设的一门专业基础课,主要讲解自动控制原理的主要内容,是一门理论性较强的课程,为了帮助学生学好这门课,能够更好的理解理论知识,在课堂教学的基础上增加了该实验环节。
《机械工程控制基础》实验指导书共编写了4个实验,有实验一、典型环节模拟研究实验二、典型系统动态性能和稳定性分析实验三、控制系统的频率特性分析实验四、调节器参数对系统调节质量的影响《机械工程控制基础》实验指导书的编写主要依据“控制工程基础”教材的内容,结合本课程教学大纲的要求进行编写。
利用计算机和MATLAB程序完成实验。
注:1)每个实验的实验报告均由5部分组成,最后一部分“实验数据分析”或“思考题”必须写。
2)每个实验所记录的图形均需标出横轴和纵轴上的关键坐标点。
目录实验一典型环节模拟研究 (4)一、实验目的二、实验要求三、实验原理四、实验内容及步骤五、实验报告要求实验二典型系统动态性能和稳定性分析 (7)一、实验目的二、实验要求三、实验原理四、实验内容及步骤五、实验报告要求实验三控制系统的频率特性分析 (9)一、实验目的二、实验要求三、实验原理四、实验内容及步骤五、实验报告要求实验四调节器参数对系统调节质量的影响 (11)一、实验目的二、实验要求三、实验原理四、实验内容及步骤五、实验报告要求附录一:MATLAB6.5的使用 (13)实验一典型环节模拟研究一、实验目的1.熟悉各种典型环节的阶跃响应曲线2.了解参数变化对典型环节动态特性的影响。
二、实验要求1.观测并记录各种典型环节的阶跃响应曲线2.观测参数变化对典型环节阶跃响应的影响,测试并记录相应的曲线三、实验原理1.惯性环节(一阶环节),如图1-1所示。
(a) 只观测输出曲线(b) 可观测输入、输出两条曲线图1-1 惯性环节原理图2.二阶环节,如图1-2所示。
或图1-2 二阶环节原理图3.积分环节,如图1-3所示。
典型系统动态性能和稳定分析

实验报告课程名称:实验项目:实验地点:专业班级:学号:学生姓名:指导教师:年月日典型系统动态性能和稳定性分析一·实验目的1学习和掌握动态性能指标的测试方法。
2研究典型系统参数对系统动态性能和稳定性的影响。
二·实验要求1定性的影响。
2定性的影响。
1 2.1.1和图2.1.2设计U9、U15、U11和U82利34 2.2.1和图2.2.2设计并连接由一个U9、U15、U11、U10和U8连成5并测出其超调量和调节时间。
672、3与5、6参阅“实验一”的实验步骤2实验步骤7“实验一”的实验步骤3这里不再赘述。
1典型二阶系统典型二阶系统的方块结构图如图 2.1.1其开环传递函数为其闭环传递函数为其中取二阶系统的模拟电路如图2.1.2该系统的阶跃响应如图2.1.3Rx接U4单元的220K 电位器改变元件参数Rx 2.1.3a 2.1.3b 2.1.3c分别对应2典型三阶系统的方块结构图如图2.2.1其开环传递函数为其中取三阶系统的模拟电路如图2.2.2所示。
该系统开环传递函数为Rx的单位为K系统特征方程为系统稳定 0<K<12系统临界稳定 K=12系统不稳定 K>12根据K求取Rx。
这里的Rx可利用模拟电路单元的220K Rx即可改变K2而改变K该系统的阶跃响应如图2.2.3 a、2.2.3b 和2.2.3c稳定、临界稳定和稳定的三种情况。
实验数据记录:二阶欠阻尼二阶过阻尼振荡二阶临界阻尼振荡三阶稳定六、实验结果与分析。
典型系统动态性能和稳定性分析
典型系统动态性能和稳定性分析系统动态性能和稳定性是指在外部扰动下,系统的响应速度和稳态特性。
这是评估系统质量和优化系统设计的重要指标。
在典型系统设计中,系统通常被建模为一个传递函数,可以用来描述系统的输出响应,其输入是系统输入和一些可能存在的扰动。
传递函数常常是一个复杂的非线性方程,需要使用线性化技术进行分析。
系统动态性能和稳定性可以通过研究系统的极点和零点来评估。
极点是传递函数的根,它们对系统的稳定性和动态响应有很大的影响。
一个系统是稳定的,当且仅当其所有极点的实部都小于零。
如果系统有一个或多个极点实部为正,那么它是不稳定的,并且会发生震荡或失控的行为。
因此,一个良好的系统设计应确保其所有极点都在复平面的左半面。
另一方面,零点是传递函数的根,它们在系统的频率响应和零状态响应中起着重要作用。
零点是传递函数的一个参数,表示在某个频率下传递函数被抵消或消除。
零点分布的位置对于系统的稳定性和响应都有重要的影响。
如果系统有零点,它们会抵消或消除特定频率下的输入信号。
因此,一个良好的系统设计应该尽可能使其零点靠近频率对应的极点,以达到良好的过渡特性和稳态精度。
系统的动态性能和稳定性可以通过研究系统的传递函数和控制策略来优化。
传递函数中的极点和零点分布可以通过调整系统参数或控制器参数来影响。
此外,使用优化方法,如PID控制器优化或系统识别方法,也可以改善系统性能。
这些方法可以帮助设计人员分析和优化系统响应,并提高系统的稳定性和性能。
在实际应用中,为了确保系统响应的快速性和稳定性,设计人员还可以使用高级控制技术,如预测控制、自适应控制和模糊控制。
这些技术可以更精细地控制系统,并通过自适应和智能控制来改善系统性能。
总之,系统的动态性能和稳定性是系统质量的重要指标,设计人员可以通过研究系统的传递函数和控制策略,以及应用高级控制技术来优化系统性能,从而实现快速响应和精确控制。
自动控制原理实验 典型系统的时域响应和稳定性分析

系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:典型系统的时域响应和稳定性分析实验时间:学生成绩:教师签名:批改时间:一、目的要求1.研究二阶系统的特征参量 (ξ、ωn) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉 Routh 判据,用 Routh 判据对三阶系统进行稳定性分析。
二、实验设备PC机一台,TD—ACC教学实验系统一套三、实验原理及内容1.典型的二阶系统稳定性分析(1) 结构框图:如图 1.2-1 所示。
图1.2-2(2) 对应的模拟电路图:如图 1.2-2 所示。
图1.2-2系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:(3) 理论分析系统开环传递函数为:;开环增益:(4) 实验内容先算出临界阻尼、欠阻尼、过阻尼时电阻 R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中(图 1.2-2),系统闭环传递函数为:其中自然振荡角频率:2.典型的三阶系统稳定性分析(1) 结构框图:如图 1.2-3 所示。
系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:图 1.2-3(2)模拟电路图:如图1.2-4 所示。
图 1.2-4(3)理论分析:系统的特征方程为:(4)实验内容:实验前由Routh 判断得Routh 行列式为:系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:为了保证系统稳定,第一列各值应为正数,所以有五、实验步骤1.将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。
由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。
自动控制原理实验-典型系统的时域响应和稳定性分析

系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:典型系统的时域响应和稳定性分析实验时间:学生成绩:教师签名:批改时间:一、目的要求1.研究二阶系统的特征参量 (ξ、ωn) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉 Routh 判据,用 Routh 判据对三阶系统进行稳定性分析。
二、实验设备PC机一台,TD—ACC教学实验系统一套三、实验原理及内容1.典型的二阶系统稳定性分析(1) 结构框图:如图 1.2-1 所示。
图1.2-2(2) 对应的模拟电路图:如图 1.2-2 所示。
图1.2-2系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:(3) 理论分析系统开环传递函数为:;开环增益:(4) 实验内容先算出临界阻尼、欠阻尼、过阻尼时电阻 R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中(图 1.2-2),系统闭环传递函数为:其中自然振荡角频率:2.典型的三阶系统稳定性分析(1) 结构框图:如图 1.2-3 所示。
系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:图 1.2-3(2)模拟电路图:如图1.2-4 所示。
图 1.2-4(3)理论分析:系统的特征方程为:(4)实验内容:实验前由Routh 判断得Routh 行列式为:系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:为了保证系统稳定,第一列各值应为正数,所以有五、实验步骤1.将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。
由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。
中南大学典型系统时域响应及稳定性分析实验报告.doc
中南大学典型系统时域响应及稳定性分析实验报告典型试验系统的时域响应和稳定性分析1.目的要求1。
研究二阶系统的特征参数(ξ,ωn)对跃迁过程的影响。
2.研究二阶对象在三种阻尼比下的响应曲线和系统稳定性。
3.熟悉劳斯判据,用劳斯判据分析三阶系统的稳定性。
2.原则1简介。
典型二阶系统的稳定性分析(1)结构框图:如图所示。
(2)理论分析系统的开环传递函数为:开环增益2。
典型三阶系统的稳定性分析(1)结构框图:如图所示。
(2)理论分析系统的开环传递函数为:系统的特征方程为:三个,一台仪表电脑,TD-1.目的要求1。
研究二阶系统的特征参数(ξ,ωn)对跃迁过程的影响。
2.研究二阶对象在三种阻尼比下的响应曲线和系统稳定性。
3.熟悉劳斯判据,用劳斯判据分析三阶系统的稳定性。
2.原则1简介。
典型二阶系统的稳定性分析(1)结构框图:如图所示。
(2)理论分析系统的开环传递函数为:开环增益2。
典型三阶系统的稳定性分析(1)结构框图:如图所示。
(2)理论分析系统的开环传递函数为:系统的特征方程为:三、一台仪表微机,TD:首先计算临界阻尼、欠阻尼和过阻尼时电阻R的理论值,然后将理论值应用于模拟电路,观察二阶系统的动态性能和稳定性,这应与理论分析基本一致。
系统的闭环传递函数为:其中固有振荡角频率:阻尼比:2.典型三阶系统稳定性分析实验内容Routh行列式由Routh在实验前确定为:为了确保系统的稳定性,第一列中的值应该是正的,因此有实验步骤:1.用“短路块”缩短信号源单元的“ST”端脚和“S”端脚。
由于每个运算放大器单元配备有零锁定场效应晶体管,所以运算放大器具有零锁定功能。
将开关置于“方波”位置,分别调节调幅和调频电位器,使“输出”端的方波幅度输出为1V,周期约为10s。
2.典型二阶系统瞬态性能指标测试(1)根据模拟电路图1.2-系统闭环传递函数:其中固有振荡角频率:阻尼比:2.典型三阶系统稳定性分析实验内容Routh行列式由Routh在实验前确定为:为了确保系统的稳定性,第一列中的值应该是正的,因此有实验步骤:1.用“短路块”缩短信号源单元的“ST”端脚和“S”端脚。
动力系统稳定性分析

动力系统稳定性分析动力系统稳定性分析是一种科学的方法,用于评估和预测系统的稳定性。
它在多个领域中都有广泛的应用,包括工程、物理学、生物学和经济学等。
在工程领域中,动力系统稳定性分析是设计和优化复杂系统的重要工具,可以帮助我们理解系统的行为和性能。
首先,动力系统稳定性分析需要建立系统的数学模型。
这个模型可以是一个方程组或差分方程,描述系统各个变量之间的关系。
通过对系统进行建模,我们可以更好地理解系统的结构和功能,并能够应对不同的操作和干扰。
在建立数学模型时,要考虑到系统中的各个要素,例如物理约束、系统动力学和控制策略等。
其次,动力系统稳定性分析需要使用稳定性理论来评估系统的行为。
稳定性理论是一种数学工具,用于判断系统是否会收敛到稳定状态,或者会出现震荡或不稳定行为。
常见的稳定性理论包括利雅普诺夫稳定性理论和极限环稳定性理论等。
通过应用这些理论,我们可以预测系统在不同条件下的稳定性,并采取相应的措施来保证系统的稳定性。
另外,动力系统稳定性分析还需要进行数值计算和仿真。
通过使用计算机模拟系统的行为,我们可以更直观地观察稳定性和非稳定性现象,以及系统的动态响应。
数值计算和仿真可以帮助我们定量地评估系统的稳定性,并进行设计上的优化。
在进行数值计算和仿真时,需要考虑到系统中的各种不确定性和随机性,并进行合理的假设和参数选择。
最后,动力系统稳定性分析需要进行实验验证。
通过构建实际的系统模型,并进行实验观测和数据分析,我们可以验证数学模型的准确性,并检查系统的稳定性分析结果。
实验验证还可以帮助我们发现和解决实际系统中存在的问题,并改进系统的性能和稳定性。
总结而言,动力系统稳定性分析是一种重要的工程方法,用于评估和预测系统的稳定性。
它需要建立数学模型,应用稳定性理论,进行数值计算和仿真,以及进行实验验证。
通过动力系统稳定性分析,我们可以更好地理解和控制复杂系统的行为,并提高系统的性能和可靠性。
无论是在工程领域还是其他领域中,动力系统稳定性分析都发挥着重要的作用,并为我们解决实际问题提供了有力的支持。
实验二 典型系统动态性能和稳定性分析
实验二典型系统动态性能和稳定性分析一.实验目的1.学习和掌握动态性能指标的测试方法。
2.研究典型系统参数对系统动态性能和稳定性的影响。
二.实验内容1.观测二阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
2.观测三阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
三.实验步骤1.熟悉实验装置,利用实验装置上的模拟电路单元,参考本实验附录中的图2.1.1和图2.1.2,设计并连接由一个积分环节和一个惯性环节组成的二阶闭环系统的模拟电路(如用U9、U15、U11和U8连成)。
注意实验接线前必须对运放仔细调零(出厂已调好,无需调节)。
信号输出采用U3单元的O1、信号检测采用U3单元的I1、运放的锁零接U3单元的G1。
2.利用实验设备观测该二阶系统模拟电路的阶跃特性,并测出其超调量和调节时间。
3.改变该二阶系统模拟电路的参数,观测参数对系统动态性能的影响。
4.利用实验装置上的模拟电路单元,参考本实验附录中的图2.2.1和图2.2.2,设计并连接由一个积分环节和两个惯性环节组成的三阶闭环系统的模拟电路(如用U9、U15、U11、U10和U8连成)。
5.利用实验设备观测该三阶系统模拟电路的阶跃特性,并测出其超调量和调节时间。
6.改变该三阶系统模拟电路的参数,观测参数对系统稳定性与动态指标的影响。
7.分析实验结果,完成实验报告。
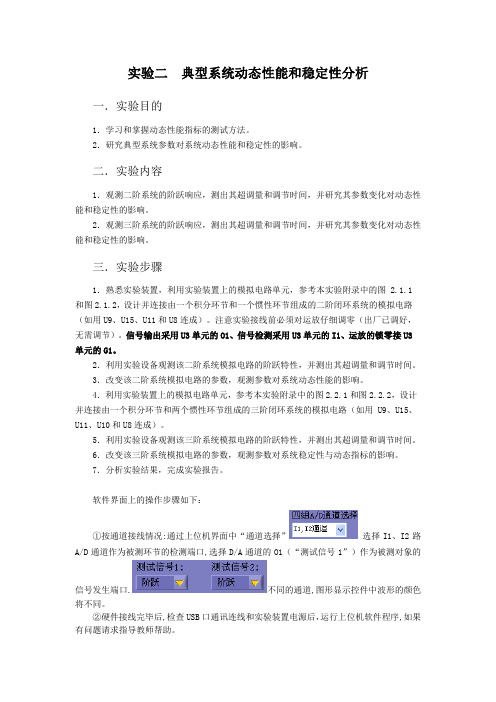
软件界面上的操作步骤如下:①按通道接线情况:通过上位机界面中“通道选择”选择I1、I2路A/D通道作为被测环节的检测端口,选择D/A通道的O1(“测试信号1”)作为被测对象的信号发生端口.不同的通道,图形显示控件中波形的颜色将不同。
②硬件接线完毕后,检查USB口通讯连线和实验装置电源后,运行上位机软件程序,如果有问题请求指导教师帮助。
③进入实验模式后,先对显示模式进行设置:选择“X-t模式”;选择“T/DIV”为1s/1HZ。
实验二--典型系统动态性能和稳定性分析

实验二典型系统动态性能和稳定性分析一.实验目的1.学习和掌握动态性能指标的测试方法。
2.研究典型系统参数对系统动态性能和稳定性的影响。
二.实验内容1.观测二阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
2.观测三阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
%三.实验步骤1.熟悉实验装置,利用实验装置上的模拟电路单元,参考本实验附录中的图和图,设计并连接由一个积分环节和一个惯性环节组成的二阶闭环系统的模拟电路(如用U9、U15、U11和U8连成)。
注意实验接线前必须对运放仔细调零(出厂已调好,无需调节)。
信号输出采用U3单元的O1、信号检测采用U3单元的I1、运放的锁零接U3单元的G1。
2.利用实验设备观测该二阶系统模拟电路的阶跃特性,并测出其超调量和调节时间。
3.改变该二阶系统模拟电路的参数,观测参数对系统动态性能的影响。
4.利用实验装置上的模拟电路单元,参考本实验附录中的图和图,设计并连接由一个积分环节和两个惯性环节组成的三阶闭环系统的模拟电路(如用U9、U15、U11、U10和U8连成)。
5.利用实验设备观测该三阶系统模拟电路的阶跃特性,并测出其超调量和调节时间。
6.改变该三阶系统模拟电路的参数,观测参数对系统稳定性与动态指标的影响。
7.分析实验结果,完成实验报告。
…软件界面上的操作步骤如下:①按通道接线情况:通过上位机界面中“通道选择”选择I1、I2路A/D通道作为被测环节的检测端口,选择D/A通道的O1(“测试信号1”)作为被测对象的信号发生端口.不同的通道,图形显示控件中波形的颜色将不同。
②硬件接线完毕后,检查USB口通讯连线和实验装置电源后,运行上位机软件程序,如果有问题请求指导教师帮助。
③进入实验模式后,先对显示模式进行设置:选择“X-t模式”;选择“T/DIV”为1s/1HZ。
④完成上述实验设置,然后设置实验参数,在界面的右边可以设置系统测试信号参数,选择“测试信号”为“周期阶跃信号”,选择“占空比”为50%,选择“T/DIV”为“1000ms”,选择“幅值”为“3V”,可以根据实验需要调整幅值,以得到较好的实验曲线,将“偏移”设为“0”。
第3章 系统分析稳定性与稳态误差
2
3.1.1 S平面到Z平面之间映射关系
s平面与z平面映射关系: z esT s j z e( j )T eT e jT eT / T
R | z | eT
z T
1. s平面虚轴映射为z平面单位圆,左半平面映射在z平面单位圆内
系统稳定必要条件 (z) a0 zn a1zn1 an1z an 0 或者
判断系统稳定性步骤: 1. 判断必要条件是否成立,若不成立则系统不稳定 2. 若必要条件成立,构造朱利表
17
二阶系统稳定性条件
(z) z2 a1z a2 0
必要条件: (1) 0 (1) 0
在z平面
z e e e sT
T cos jT sin z esT e e Tn cos jTn sin
n
n
R eTn cos ,z Tn sin
等自然频率轨迹
图3-10 等 自然频率轨 迹映射
11
12
图形对横轴是对称的:
z平面
j
2 3
5
n ,
cos( ) n
| z | eT enT cos z T
8
9
10
6. 等自然频率轨迹的映射
ωn =常数
在s平面 s j ne j n cos jn sin cot1( /)
lim(1
z 1
z 1 ) 1
1 D(z)G(z)
R(z)
es*s 与输入信号R(z)及系统 D(z)G(z) 结构特性均有关
29
1.输入信号为单位阶跃函数 r(t) 1(t)
R(z) 1/(1 z1)
最新典型系统动态性能和稳定性分析的电路模拟

典型系统动态性能和稳定性分析的电路模拟典型系统动态性能和稳定性分析的电路模拟一、实验目的1、学习和掌握动态性能指标的测试方法。
2、研究典型系统参数对系统动态性能和稳定性的影响。
二、实验内容观测二阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
三、实验步骤1、熟悉实验设备,设计并连接一个积分环节和一个惯性环节组成的二阶闭环系统的模拟电路;2、利用实验设备观测二阶系统模拟电路的阶跃特性,并测出其超调量和调节时间;3、改变该二阶系统模拟电路的参数,观测参数对系统动态性能的影响,并记录不同参数下的系统输出曲线。
1.开环传递函数为323()232k W s s s s =+++ den=[1,2,3,2]; roots(den)%开换极点 G=tf(3,[1,2,3,2]);[Gm,Pm,Wcg,Wcp]=margin(G) nyquist(G) bode(G) grid onden=[1,2,3,2]; roots(den)%开换极点ans =-0.5000 + 1.3229i -0.5000 - 1.3229i -1.0000-1.5-1-0.500.51 1.5-1.5-1-0.50.511.5Nyquist DiagramReal AxisI m a g i n a r y A x i sM a g n i t u d e (d B )10-210-110101102P h a s e (d e g )Bode DiagramFrequency (rad/sec)G=tf(3,[1,2,3,2]);[Gm,Pm,Wcg,Wcp]=margin(G)Gm =1.3338Pm =17.1340Wcg =1.7323Wcp =1.5599-3-2-10123-3-2-1123Nyquist DiagramReal AxisI m a g i n a r y A x i s-100-80-60-40-20020M a g n i t u d e (d B)10-210-110101102-270-180-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)G=tf(6,[1,2,3,2]);[Gm,Pm,Wcg,Wcp]=margin(G)Warning: The closed-loop system is unstable. > In lti.margin at 89Gm =0.6669Pm =-16.6613Wcg =1.7323Wcp =1.96822.将系统的开环传函改为323()(232)k W s s s s s =+++den=[1,2,3,2,0]; roots(den)%开换极点ans =-0.5000 + 1.3229i -0.5000 - 1.3229i-1.0000-2.5-2-1.5-1-0.500.5-30-20-10102030Nyquist DiagramReal AxisI m a g i n a r y A x i s-150-100-50050100M a g n i t u d e (d B)1010101010-360-270-180-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)G=tf(3,[1,2,3,2,0]);[Gm,Pm,Wcg,Wcp]=margin(G)Warning: The closed-loop system is unstable.> In lti.margin at 89Gm =0.6667Pm =-43.5555Wcg =1.0000Wcp =1.3325将系统的开环传函改为323()(232)k W s s s s s =+++-4.5-4-3.5-3-2.5-2-1.5-1-0.500.5-60-40-20204060Nyquist DiagramReal AxisI m a g i n a r y A x i s-150-100-50050100M a g n i t u d e (d B)10-210-110101102-360-270-180-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)G=tf(6,[1,2,3,2,0]);[Gm,Pm,Wcg,Wcp]=margin(G)Warning: The closed-loop system is unstable. > In lti.margin at 89Gm =0.3333Pm =-84.3432Wcg =1.0000Wcp =1.6697>> >> 3.2323()(232)k W s s s s s =+++den=[1,2,3,2,0,0]; roots(den)%开换极点ans =0 0-0.5000 + 1.3229i -0.5000 - 1.3229i -1.0000-600-500-400-300-200-1000100-50-40-30-20-1001020304050Nyquist DiagramReal AxisI m a g i n a r y A x i sM a g n i t u d e (d B )10-210-1100101102P h a s e (d e g )Bode DiagramFrequency (rad/sec)G=tf(3,[1,2,3,2,0,0]);[Gm,Pm,Wcg,Wcp]=margin(G)Warning: The closed-loop system is unstable.> In lti.margin at 89Gm =InfPm =-115.6441Wcg =NaNWcp =-1200-1000-800-600-400-2000200-100-80-60-40-20020406080100Nyquist DiagramReal AxisI m a g i n a r y A x i sM a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramFrequency (rad/sec)G=tf(6,[1,2,3,2,0,0]);[Gm,Pm,Wcg,Wcp]=margin(G)Warning: The closed-loop system is unstable.> In lti.margin at 89 Gm =InfPm =-154.5325Wcg =NaNWcp =1.4900>>RFFNVUUH。
稳定性、静态性能和动态性能的分析

朱利稳定判据--——避免直接解根,由D(z)判定系统稳定性。 设闭环系统特征根为:
列朱利矩阵:
行 数 1 2 3 4 5 6 M 2n − 5 2n − 4 2n − 3 2n − 2
D(z) = a0 + a1z + a2 z2 +L+ an zn
z0 a0 an b0 b n −1 c0 cn−2 M p0 p3 q0 q2 z1 a1 a n −1 b1 bn−2 c1 cn−3 M p1 p2 q1 q1 z2 a2 an−2 b2 bn−3 c2 cn−4 M p2 p1 q2 q0 p3 p0 L L L L L L L z
检验稳定性的方法
• 3.1.2 修正的劳斯判据(w变换与劳斯稳定判据的 结合)检验方法:
• 修正的劳斯判据,其基本思想!! • • • 在Z平面内,劳斯判据是不能直接应用到判定系统的 稳定性中,如果将Z平面再复原到S平面,则系统方程中又 将出现超越函数。 所以我们想法再寻找一种新的变换,使Z平面的单位 圆内映射到一个新的平面的虚轴之左。此新的平面我们称 为W平面,在此平面上,我们就可直接应用劳斯稳定判据 了。
− 792 624
− 39 119 = −792 45 - 117
− 504
系统不稳定
离散系统的稳定性判据 (4)
例3 已知离散系统特征方程 ,判定系统稳定性。
D( z ) = 0.002 + 0.08 z + 0.4 z 2 − 1.368 z 3 + z 4 = 0 D(1) = 0.002 + 0.08 + 0.4 − 1.368 + 1 = 0.114 > 0 D( −1) = 0.002 − 0.08 + 0.4 + 1.368 + 1 = 2.69 > 0
典型系统动态性能和稳定性分析

实验二 典型系统动态性能和稳定性分析一.实验目的:l 、学习和掌握动态性能指标的测试方法(如.σ s t p t n 等)。
2、研究典型系统参数对系统动态性能和稳定性的影响。
二. 实验内容:l 、观测不同参数下二阶、三阶系统的阶跃响应,测试出时域性能指标(如.σ s t p t n 等),并分析其参数变化对动态性能和稳定性的影响。
2. 观测增益对三阶系统稳定性的影响,找出临界稳定的增益值。
三. 实验原理:二阶系统,如图(2-1)所示:图(2-1)三阶系统,如图(2-2)所示:图(2-2)四.实验步骤:利用MATLAB 中的Simulink 仿真软件。
l. 典型二阶系统瞬态响应指标的测试。
(1) 参考实验一,建立如图(2-1)所示的实验方块图进行仿真。
(2) 单击工具栏中的 图标,开始仿真,观测在阶跃输入信号下,典型二阶系统的输出值)(0t U 。
根据输出波形)(0t U 调整“Gain ”模块的增益,使)(0t U 的波形呈现衰减比n:1分别为4:1和10:1时的衰减振荡状态。
然后记录超调量σ,峰值时间p t ,上升时间r t ,调节时间s t 及此时的增益值,分析系统参数对动态性能的影响。
(3) 调整“Gain ”模块的增益,使)(0t U 呈现临界振荡时的波形,记录此时“Gain ”模块的增益值,与计算的理论值相比较。
2. 典型三阶系统瞬态响应指标的测试及稳定性分析。
(1) 在典型二阶系统实验方块图的基础上,将对象串联一个惯性环节,重新连接模块,建立如图(2-2)所示的实验方块图进行仿真。
(2) 单击工具栏中的图标,开始仿真,观测阶跃输入信号下典型三阶系统的输出值)(0t U ,根据)(0t U 的波形,调整“Gain ”模块的增益,使)(0t U 的波形呈现2:1衰减振荡状态。
然后记录超调量σ,峰值时间p t ,上升时间r t ,调节时间s t 及此时的“Gain ”模块的增益值,分析系统参数对动态性能的影响。
电力系统中的稳态分析与动态仿真研究
电力系统中的稳态分析与动态仿真研究电力系统是现代社会中不可或缺的基础设施,它涉及到诸如发电、输电和配电等各个方面。
电力系统中的稳态分析和动态仿真是对其稳定性和可靠性的评估和优化,是电力系统研究中重要的环节。
一、稳态分析稳态分析是电力系统研究中的一项重要工作,其主要目的是评估电力系统的稳定性、安全性和可靠性。
稳态分析的核心内容包括功率平衡计算、电压稳定计算和电流分布计算等。
在功率平衡计算中,我们需要计算出各发电机的产生功率、各负载的消耗功率以及系统中各个节点的潮流,从而保证功率平衡。
对于电压稳定计算,我们需要考虑电网中可能出现的电压不稳定现象,如电压振荡、电压偏差等,从而控制电网中各个节点的电压在合理范围内波动。
电流分布计算则是用于评估各个电网部件的负荷容量和电流热稳定性。
稳态分析的结果可以用于电力系统的规划、设计、运行和维护等方面。
同时,稳态分析也是其他电力系统分析的基础,如电力系统动态仿真。
二、动态仿真动态仿真是对电力系统的瞬态性能进行评估和分析的一种方法。
瞬态性能主要包括电力系统对于负荷和扰动的响应能力、电力系统的稳定性和响应速度等重要指标。
动态仿真的分析流程包括建立电力系统模型、进行故障分析、进行稳定性分析和评估等步骤。
其中,故障分析是指在电力系统中模拟出各种可能出现的电路及设备故障,并观察其对电力系统运行状态的影响。
稳定性分析则是对电力系统在故障情况下的稳定性进行评估和分析,包括小干扰稳定性和大扰动稳定性等方面。
动态仿真的结果可以用于电力系统的重大修建和重组,为电力系统规划、设计和运行提供重要支持。
三、稳态分析与动态仿真的联系稳态分析和动态仿真是电力系统研究中不可分割的两个方面,其关系可以从如下几个方面进行阐述。
首先,稳态分析是动态仿真的基础。
只有对电力系统在稳态条件下的性能进行分析和评估,才能在瞬态条件下对其进行仿真分析和评估。
其次,动态仿真是稳态分析的延伸。
在稳态分析的基础上,我们需要对电力系统在故障和扰动等情况下的稳定性进行分析和评估,才能更加全面地评估电力系统的性能和可靠性。
实验二-二阶系统的动态特性与稳定性分析

实验⼆-⼆阶系统的动态特性与稳定性分析实验⼆-⼆阶系统的动态特性与稳定性分析⾃动控制原理实验报告实验名称:⼆阶系统的动态特性与稳定性分析班级:姓名:学号:实验⼆⼆阶系统的动态特性与稳定性分析⼀、实验⽬的1、掌握⼆阶系统的电路模拟⽅法及其动态性能指标的测试技术过阻尼、临界阻尼、⽋阻尼状态)对系统动态2、分析⼆阶系统特征参量(ξω,n性能的影响;3、分析系统参数变化对系统稳定性的影响,加深理解“线性系统稳定性⾄于其结构和参数有关,与外作⽤⽆关”的性质;4、了解掌握典型三阶系统的稳定状态、临界稳定、不稳定状态;5、学习⼆阶控制系统及其阶跃响应的Matlab 仿真和simulink实现⽅法。
⼆、实验内容1、构成各⼆阶控制系统模拟电路,计算传递函数,明确各参数物理意义。
2、⽤Matlab和simulink仿真,分析其阶跃响应动态性能,得出性能指标。
3、搭建典型⼆阶系统,观测各个参数下的阶跃响应曲线,并记录阶跃响应曲线的超调量%σ、峰值时间tp 以及调节时间ts ,研究其参数变化对典型⼆阶系统动态性能和稳定性的影响; 4、搭建典型三阶系统,观测各个参数下的阶跃响应曲线,并记录阶跃响应曲线的超调量%σ、峰值时间tp 以及调节时间ts ,研究其参数变化对典型三阶系统动态性能和稳定性的影响; 5、将软件仿真结果与模拟电路观测的结果做⽐较。
三、实验步骤1、⼆阶系统的模拟电路实现原理将⼆阶系统:ωωξω22)(22nn s G s s n++=可分解为⼀个⽐例环节,⼀个惯性环节和⼀个积分环节ωωξω221)()()()(2C C C C s C C 22221542322154215426316320nn s s s s s G s s s C R R R R R R R R R R R R C R R R R R R R R R U U n i ++=++=++== 2、研究特征参量ξ对⼆阶系统性能的影响将⼆阶系统固有频率5.12n=ω保持不变,测试阻尼系数ξ不同时系统的特性,搭建模拟电路,改变电阻R6可改变ξ的值当R6=50K 时,⼆阶系统阻尼系数ξ=0.8 当R6=100K 时,⼆阶系统阻尼系数ξ=0.4 当R6=200K 时,⼆阶系统阻尼系数ξ=0.2(1)⽤Matlab 软件仿真实现⼆阶系统的阶跃响应,计算超调量%σ、峰值时间tp 以及调节时间ts 。
自动控制原理实验-典型系统的瞬态响应和稳定性分析
图三 T1=1 T2=2 K1=0.5 K2=3 K=K1K2=1.5 由图可知系统一直在做等幅振荡 系统不稳定:
图四 T1=1 T2=2 K1=0.5 K2=4 K=K1K2=2 由图可知系统的幅值一直在增大,是一种不稳定状态。
图五 T1=1 T2=2 K1=0.5 K2=5 K=K1K2=2.5 由图可知系统的幅值一直在增大,是一种不稳定状态。
打好基础。学习瞬态性能指标的测试技巧,了解参数对系统瞬态性能及 稳定性的影响,认识典型系统阶跃响应曲线特点,及其环节参数与瞬态 性能指标关系。 2、 实验内容
(1)进一步熟悉自动控制实验教学系统软件包的使用方法。 (2)进行典型系统瞬态性能指标的测试技巧,了解参数对系统瞬 态性能及稳定性的影响。 三、实验装置 (1)微型计算机。 (2)自动控制实验教学软件包。 四、实验原理 1、典型二阶系统
六误差分析1对二阶系统分析可知当01时峰值时间tp理论计算值与实际测量值有一定的误差这是因为理论上当曲线在终值的2以内就可以但实验中较难取到系统曲线刚好到达2处的点所以是以刚好达到终值时的时间作为调节时间此结果比计算值大些
实验二 典型系统的瞬态响应和稳定性分析
1、 实验目的 进一步熟悉自动控制实验教学系统软件包的使用方法,为后续实验
(2)从图中取点,会存在一定的人为取点误差,但与实际结果较 为接近。
七、思考与讨论 1、在前面二阶系统的原理图中,改变增益K会发生不稳定现象吗? 答:会,因为改变开环增益K时,ξ将发生变化,可能使ξ的值大于
1,从而使系统不稳定。 2、 有哪些措施能增加系统的稳定度?他们对系统的性能还有什么影 响?
答:可以增加比例微分环节或者是测速反馈环节以改变系统的性 能。
图七 已知条件:ξ=0.8 ωn=0.8 K=0.5 T=0.781 由图可知:c(tp)=1.017 c(∞)=1.003 tp=6.651s tr=5.162s ts=9.475s 理论计算值: δ%=0.015 tp=6.545s tr=4.734s ts=6.875s 衰减比n:n=1.017/1=1.017
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
典型系统动态性能和稳定性分析
一·实验目的
1 学习和掌握动态性能指标的测试方法。
2 研究典型系统参数对系统动态性能和稳定性的影响。
二·实验要求
1 观测二阶系统的阶跃响应 测出其超调量和调节时间 并研究其参数变化对动态性能和稳定性的影响。
2 观测三阶系统的阶跃响应 测出其超调量和调节时间 并研究其参数变化对动态性能和稳定性的影响。
三·实验步骤
1 熟悉实验箱 利用实验箱上的模拟电路单元 参考本实验附录中的图2.1.1和图2.1.
2 设计并连接由一个积分环节和一个惯性环节组成的二阶闭环系统的模拟电路 如用U9、U15、U11和U8连成 。
注意实验接线前必须对运放仔细调零。
接线时要注意对运放锁零的要求。
2 利用实验设备观测该二阶系统模拟电路的阶跃特性 并测出其超调量和调节时间。
3 改变该二阶系统模拟电路的参数 观测参数对系统动态性能的影响。
4 利用实验箱上的模拟电路单元 参考本实验附录中的图2.2.1和图2.2.2 设计并连接由一个积分环节和两个惯性环节组成的三阶闭环系统的模拟电路 如用U9、U15、U11、U10和U8连成 。
5 利用实验设备观测该三阶系统模拟电路的阶跃特性 并测出其超调量和调节时间。
6 改变该三阶系统模拟电路的参数 观测参数对系统稳定性与动态指标的影响。
7 分析实验结果 完成实验报告。
注意 以上实验步骤中的2、3与5、6的具体操作方法 请参阅“实验一”的实验步骤2 实验步骤7的具体操作方法 请参阅“实验一”的实验步骤3 这里不再赘述。
附录
1 典型二阶系统
典型二阶系统的方块结构图如图 2.1.1所示
其开环传递函数为
其闭环传递函数为其中
取二阶系统的模拟电路如图2.1.2所示 该系统的阶跃响应如图2.1.3所示 Rx接U4单元的220K电位器改变元件参数Rx大小 研究不同参数特征下的时域响应。
2.1.3a 2.1.3b 2.1.3c分别对应二阶系统在过阻尼 临界阻尼 欠阻尼三种情况下的阶跃响应曲线
2 典型三阶系统
典型三阶系统的方块结构图如图2.2.1所示
其开环传递函数为其中取三阶系统的模拟电路如图2.2.2所示。
该系统开环传递函数为Rx的单位为K
系统特征方程为根据劳斯判据得到
系统稳定 0<K<12
系统临界稳定 K=12
系统不稳定 K>12
根据K求取Rx。
这里的Rx可利用模拟电路单元的220K电位器 改变Rx即可改变K2 从而改变K 得到三种不同情况下的实验结果。
该系统的阶跃响应如图2.2.3 a、2.2.3b 和2.2.3c所示 它们分别对应系统处于不稳定、临界稳定和稳定的三种情况。