第五章 控制系统的稳定性分析(含习题解答)
第5章“控制系统的李雅普诺夫稳定性分析”练习题及答案.doc

第5章“控制系统的李雅普诺夫稳定性分析”练习题及答案.doc第5章 “控制系统的李雅普诺夫稳定性分析”练习题及答案5.1 判断下列函数的正定性1) 2221231213()2322V x x x x x x x =++-+x 2) 222123121323()82822V x x x x x x x x x =++-+-x 3) 22131223()2V x x x x x x =+-+x解1) T T 211()130101V A -??==-x x x x x , 因为顺序主⼦式2120,50,13->=>- 2111302011--=> 所以0>A ,()V x 为正定函数。
2) T T 841()421111V -??==---x x Ax x x , 因为主⼦式8481218,2,10,0,70,10,421111-->==>=>--421164421680111---=++---<- 所以A 不定,()V x 为不定函数。
3) T T 1212110()1001V -??==-x x Ax x x , 因为顺序主⼦式1110,10,1->=-<- 121211011001041--=--<所以A 为不定矩阵,()V x 为不定函数。
5.2 ⽤李雅普诺夫第⼀⽅法判定下列系统在平衡状态的稳定性。
2211211222212212()()x x x x x x x x x x x x =-+++=--++解解⽅程组 22121122212212()0()0x x x x x x x x x x ?-+++=?--++=?只有⼀个实孤⽴平衡点(0,0)。
在(0,0)处将系统近似线性化,得** 1111x x -??=?--,由于原系统为定常系统,且的特征根1s i =-±均具有负实部,于是根定理5.3可知系统在原点(0,0)附近⼀致渐近稳定。
1习题集第五章系统稳定性
【解】 由特征方程列劳斯表如下:
S4
1
T 100
S3
2
10
S 2 T 5 100
S1 10(T 5) 200
S0
100
T 50 由劳斯判据,系统稳定,则
10(T 5) 200 0 解得: T 25
5-8 已知系统特征方程如下,试求系统在 s 右平面的根数及虚根值. (1) s5 3s4 12s3 24s2 32s 48 0
1.5K 0
解得: 0 K 5 3 5
5-12 试确定如下图所示系统的稳定性.
【解】 由系统方框图可得系统的闭环传递函数为:
10(10s 1)
(s)
特征方程为: s(s 1) 10(10s 1) 0
s(s 1) 10(10s 1)
即: s2 101s 10 0
5-3 设单位反馈系统的开环传递函数分别为
K (s 1) G(s)
s (s 1) (s 5)
1 K * (s 1) 【解】 G(s) 5
1 s(s 1)( s 1)
5
所以开环增益 K 1 K * 5
由开环传递函数可得系统的闭环传递函数为:
K (s 1) (s)
1 s(s 1)( s 1) K (s 1)
,试用对数频率特性判别系统的稳定性。
【解】画出开环频率特性,并依系统中有两个积分环节做出辅助线如图所示:
在 L() 0范围内,N N 0 ,故 P 2N ,则系统闭环稳定。
10
0.1K A 0
0.1K A (0.09 0.2K A ) 0.1K A 0
控制工程基础习题解答5
控制工程基础习题解答第五章5-1.已知开环系统的传递函数如下,试用罗斯-赫尔维茨判据判别其闭环稳定性。
(1). ()()()()()32110+++=s s s s s H s G (2). ()()()()()()38.05.022.0++++=s s s s s s H s G (3). ()()()5060030010022++=s s s s H s G (4).()()()2481322+++=s s s s s H s G 解:(1). 特征方程为01016523=+++s s s100141051610123s s s s第一列全部大于零,所以闭环稳定。
(2). 特征方程为04.04.13.43.4234=++++s s s s4.097.04.097.34.13.44.03.4101234s s s s s 第一列全部大于零,所以闭环稳定。
(3). 特征方程为010050600300234=+++s s s100012001005006001005030001234-s s s s s第一列有小于零的数存在,所以闭环不稳定,符号变化了两次,有两个右极点。
(4). 特征方程为013248234=++++s s s s124100380012410038 18924138=5033801241038= 503124100380012410038= 所有主子行列式全大于零,所以闭环稳定。
5-2.已知单位负反馈系统的开环传递函数如下()⎪⎪⎭⎫ ⎝⎛++=1222n n s s s Ks G ωζω式中s rad n /90=ω,2.0=ζ。
试确定K 取何值闭环稳定。
解:方法1:特征方程为0810081003623=+++K s s s 36008100810036810036081001810036222≤≥≥-⨯=K K K K KK36810081003681001810036≤≥-⨯=K K K得当360<<K 时,闭环稳定,当36时,闭环临界稳定。
现代控制理论习题解答(第五章)
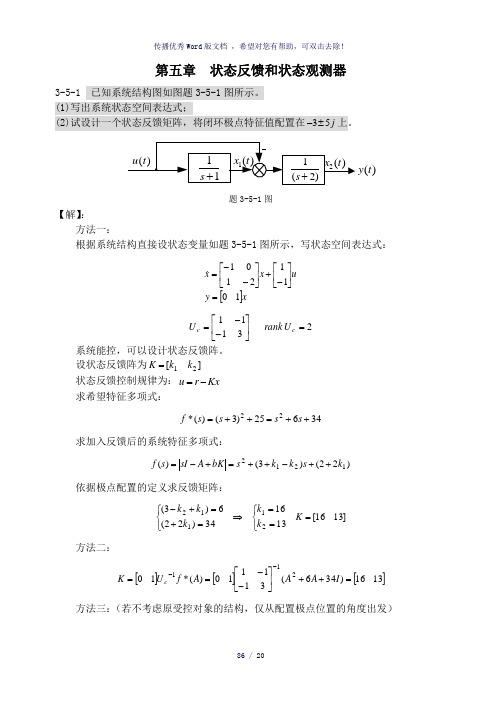
第五章 状态反馈和状态观测器3-5-1 已知系统结构图如图题3-5-1图所示。
(1)写出系统状态空间表达式;(2)试设计一个状态反馈矩阵,将闭环极点特征值配置在j 53±-上。
)(t y题3-5-1图【解】:方法一:根据系统结构直接设状态变量如题3-5-1图所示,写状态空间表达式:[]x y u x x 10112101=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--= 23111=⎥⎦⎤⎢⎣⎡--=c c U rank U系统能控,可以设计状态反馈阵。
设状态反馈阵为][21k k K = 状态反馈控制规律为:Kx r u -= 求希望特征多项式:34625)3()(*22++=++=s s s s f求加入反馈后的系统特征多项式:)22()3()(1212k s k k s bK A sI s f ++-++=+-=依据极点配置的定义求反馈矩阵:]1316[131634)22(6)3(21112=⎩⎨⎧==⇒⎩⎨⎧=+=+-K k k k k k 方法二:[][][]1316)346(311110)(*10211=++⎥⎦⎤⎢⎣⎡--==--I A A A f U K c方法三:(若不考虑原受控对象的结构,仅从配置极点位置的角度出发)求系统传递函数写出能控标准型:2321)111()()(2++-=+-+=s s ss s s U s Y []xy u x x 10103210-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= 求系统希望特征多项式:34625)3()(*22++=++=s s s s f求状态反馈矩阵K ~:[][][]33236234~21=--==k k K [][][][]5.05.031111010111=⎥⎦⎤⎢⎣⎡--==--Ab bP⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=105.05.011A P P P []1316~==P K K依据系统传递函数写出能控标准型ss s s s s s U s Y 2310)2)(1(10)()(23++=++= []x y u x x 0010100320100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=求系统希望特征多项式:464]1)1)[(2()(*232+++=+++=s s s s s s f求状态反馈矩阵:[][][]144342604321=---==k k k K 。
自动控制原理第五章习题及答案

第五章习题与解答5-1试求题5-1图(a)、(b)网络的频率特性。
u r R1u cR2CR2R1u r u c(a) (b)题5-1图R-C网络解(a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(RRCRRTCRRRRKsTsKsCRsCRRRsUsUrcττωωτωωωωω11121212121)1()()()(jTjKCRRjRRCRRjRjUjUjGrca++=+++==(b)依图:⎩⎨⎧+==++=+++=CRRTCRsTssCRRsCRsUsUrc)(1111)()(2122222212ττωωτωωωωω2221211)(11)()()(jTjCRRjCRjjUjUjGrcb++=+++=="5-2某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(tcs和稳态误差)(tes(1)tt r2sin)(=(2))452cos(2)30sin()(︒--︒+=ttt r题5-2图反馈控制系统结构图解 系统闭环传递函数为: 21)(+=Φs s 频率特性:2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=-系统误差传递函数: ,21)(11)(++=+=Φs s s G s e则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时,2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ>)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m ss ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m ss ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-3 若系统单位阶跃响应 h t e e t tt()..=-+≥--11808049试求系统频率特性。
机械控制工程基础第五章练习习题及解答

题型:选择题题目:关于系统稳定的说法错误的是【】A.线性系统稳定性与输入无关B.线性系统稳定性与系统初始状态无关C.非线性系统稳定性与系统初始状态无关D.非线性系统稳定性与系统初始状态有关分析与提示:线性系统稳定性与输入无关;非线性系统稳定性与系统初始状态有关。
答案:C习题二题型:填空题题目:判别系统稳定性的出发点是系统特征方程的根必须为或为具有负实部的复数,即系统的特征根必须全部在是系统稳定的充要条件。
分析与提示:判别系统稳定性的出发点是系统特征方程的根必须为负实数或为具有负实部的复数,即系统的特征根必须全部在复平面的左半平面是系统稳定的充要条件。
答案:负实数、复平面的左半平面习题三题型:选择题题目:一个线性系统稳定与否取决于【】A.系统的结构和参数B.系统的输入C.系统的干扰D.系统的初始状态分析与提示:线性系统稳定与否取决于系统本身的结构和参数。
答案:A习题四题型:填空题题目:若系统在的影响下,响应随着时间的推移,逐渐衰减并回到平衡位置,则称该系统是稳定的分析与提示:若系统在初始状态的影响下(零输入),响应随着时间的推移,逐渐衰减并趋向于零(回到平衡位置),则称该系统是稳定的;反之,若系统的零输入响应发散,则系统是不稳定的。
答案:初始状态习题五题型:填空题题目:系统的稳定决定于的解。
分析与提示:系统的稳定决定于特征方程的解。
答案:特征方程题型:填空题题目:胡尔维兹(Hurwitz )判据、劳斯(Routh )判据又称为 判据。
分析与提示:胡尔维兹(Hurwitz )判据、劳斯(Routh )判据,又称为代数稳定性判据。
答案:代数稳定性习题二题型:填空题题目:利用胡尔维兹判据,则系统稳定的充要条件为:特征方程的各项系数均为 ;各阶子行列式都 。
分析与提示:胡尔维兹判据系统稳定的充要条件为:特征方程的各项系数均为正;各阶子行列式都大于零。
答案:正、大于零习题三题型:计算题题目:系统的特征方程为010532234=++++s s s s用胡尔维兹判据判别系统的稳定性。
自动控制原理及其应用课后习题第五章答案
ω
20 0 -20
10 ωc
1
2 -20dB/dec
ω
-60dB/dec
10 ≈1 ω2 0.5 c
ω c=4.5
5 ≈1 ω c=7.9 ω 0.01 c3
第五章习题课 (5-17)
-20
低频段曲线: 低频段曲线: 20lgK=20dB φ (ω ) 0 ω1=5 ω2=15 -90 相频特性曲线: 相频特性曲线: -180 -270 φ ( )= -90o ω ω=0 φ ( )= -270o ω ω=∞
-60dB/dec
ω
第五章习题课 (5-2)
10(s+0.2) 1.33(5s+1) (5) G(s)= s2(s+0.1)(s+15)=s2(10s+1)(0.67s+1) 解: 低频段曲线: 低频段曲线: 20lgK=2.5dB
第五章习题课 (5-7)
5-7 已知奈氏曲线,p为不稳定极点个数, 已知奈氏曲线, 为不稳定极点个数 为不稳定极点个数, υ为积分环节个数,试判别系统稳定性。 为积分环节个数,试判别系统稳定性。 Im υ=2 (b) p=0 (a) p=0 Im υ=0
ω=0 Re -1 0 ω=0+ -1 0 ω=0 Re
第五章习题课 (5-1)
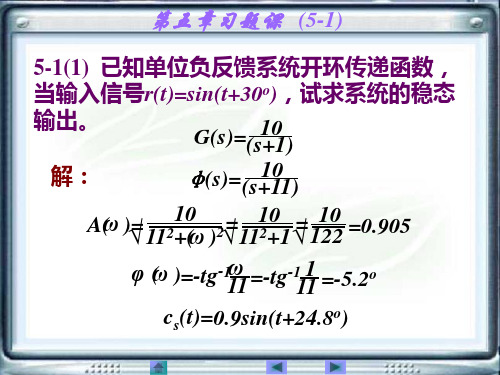
5-1(1) 已知单位负反馈系统开环传递函数, 已知单位负反馈系统开环传递函数, 当输入信号r(t)=sin(t+30o),试求系统的稳态 当输入信号 , 输出。 输出。 10 G(s)=(s+1) 10 解: φ(s)= (s+11) 10 = 10 = 10 ω A( )= 2 2 112+1√ 122 =0.905 √ 11 +( ) √ ω φ ( )=-tg-1ω =-tg-1 1 =-5.2o ω 11 11 cs(t)=0.9sin(t+24.8o)
自动控制理论第五章习题汇总

自动控制理论第五章习题汇总填空题1、系统的频率响应与正弦输入信号之间的关系称为频率响应2、在正弦输入信号的作用下,系统输入的稳态分量称为频率响应简答题:5-2、什么是最小相位系统及非最小相位系统?最小相位系统的主要特点是什么?答在s平面上,开环零、极点均为负实部的系统称为最小相位系统;反之,开环零点或极点中具有正实部的系统称为非最小相位系统。
最小相位系统的主要特点是:相位滞后最小,并且幅频特性与相频特性有惟一的确定关系。
如果知道最小相位系统的幅频特性,可惟一地确定系统的开环传递函数。
5-3、什么是系统的频率响应?什么是幅频特性?什么是相频特性?什么是频率特性?答对于稳定的线性系统,当输入信号为正弦信号时,系统的稳态输出仍为同频率的正弦信号,只是幅值和相位发生了改变,如图5-3所示,称这种过程为系统的频率响应。
图5-3称为系统的幅频特性,它是频率的函数;称为系统的相频特性,它是频率的函数:称为系统的频率特性。
稳定系统的频率特性可通过实验的方法确定。
计算题5-1、设某控制系统的开环传递函数为)()(s H s G =)10016()12.0(752+++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值。
解:Bode 图如下所示剪切频率为s rad c /75.0=ω。
5-2、某系统的结构图和Nyquist 图如图(a)和(b)所示,图中2)1(1)(+=s s s G 23)1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程正实部根的个数。
解:由系统方框图求得内环传递函数为:ss s s s s s H s G s G +++++=+23452474)1()()(1)( 内环的特征方程:04742345=++++s s s s s由Routh 稳定判据:1:0310:16:44:171:01234s s s s s由此可知,本系统开环传函在S 平面的右半部无开环极点,即P=0。
第5章“控制系统的李雅普诺夫稳定性分析”练习题及答案.doc

第5章 “控制系统的李雅普诺夫稳定性分析”练习题及答案5.1 判断下列函数的正定性1) 2221231213()2322V x x x x x x x =++-+x 2) 222123121323()82822V x x x x x x x x x =++-+-x 3) 22131223()2V x x x x x x =+-+x解1) T T 211()130101V A -⎡⎤⎢⎥==-⎢⎥⎢⎥⎣⎦x x x x x , 因为顺序主子式2120,50,13->=>- 2111302011--=> 所以0>A ,()V x 为正定函数。
2) T T 841()421111V -⎡⎤⎢⎥==--⎢⎥⎢⎥-⎣⎦x x Ax x x , 因为主子式8481218,2,10,0,70,10,421111-->==>=>--841421164421680111---=++---<- 所以A 不定,()V x 为不定函数。
3) T T 1212110()1001V -⎡⎤⎢⎥==-⎢⎥⎢⎥⎣⎦x x Ax x x , 因为顺序主子式1110,10,1->=-<- 121211011001041--=--<所以A 为不定矩阵,()V x 为不定函数。
5.2 用李雅普诺夫第一方法判定下列系统在平衡状态的稳定性。
2211211222212212()()x x x x x x x x x x x x =-+++=--++解解方程组 22121122212212()0()0x x x x x x x x x x ⎧-+++=⎨--++=⎩只有一个实孤立平衡点(0,0)。
在(0,0)处将系统近似线性化,得**1111x x -⎡⎤=⎢⎥--⎣⎦,由于原系统为定常系统,且矩阵1111-⎡⎤⎢⎥--⎣⎦的特征根1s i =-±均具有负实部,于是根定理5.3可知系统在原点(0,0)附近一致渐近稳定。
《自动控制原理》第五章:系统稳定性
5.2 稳定的条件
当σi和λi均为负数,即特征根的 σi和λi均为负数, 均为负数 实部为负数,系统是稳定的; 实部为负数,系统是稳定的; 或极点均在左平面。 或极点均在左平面。
5.3 代数稳定性判据
定常线性系统稳定的充要条件 定常线性系统稳定的充要条件是特征方程的根具有负 充要条件是特征方程的根具有负 实部。因此,判别其稳定性,要解系统特征方程的根。为 实部。因此,判别其稳定性,要解系统特征方程的根。 避开对特征方程的直接求解,可讨论特征根的分布, 避开对特征方程的直接求解,可讨论特征根的分布,看其 是否全部具有负实部,并以此来判别系统的稳定性,这样 是否全部具有负实部,并以此来判别系统的稳定性, 也就产生了一系列稳定性判据。 也就产生了一系列稳定性判据。 其中最主要是E.J.Routh(1877 )h和Hurwitz( 其中最主要是E.J.Routh(1877年)h和Hurwitz(1895 E.J.Routh(1877年 年)分别提出的代数判据。 分别提出的代数判据 代数判据。
习题讲解: 习题讲解:
µ
G1
Q21
G1
h2
k1 k1 G1 ( s ) = , G1 ( s ) = (T1s + 1) (T1s + 1) k1k 2 G0 ( s ) = (T1s + 1)(T2 s + 1)
kp
G0 ( s ) G(s) = 1 + G0 ( s ) K p
5.4 Nyquist稳定性判据 Nyquist稳定性判据
系统稳定的条件? 系统稳定的条件?
5.2 稳定的条件
d n y (t ) d ( n −1) y (t ) dy (t ) 线性系统微分方程: 线性系统微分方程: n a + an −1 + L + a1 + a0 y (t ) n ( n −1) dt dt dt d m x(t ) d ( m −1) x(t ) dx(t ) = bm + bm−1 + L + b1 + b0 x(t ) m ( m −1) dt dt dt d n y (t ) d ( n −1) y (t ) dy (t ) + a( n −1) + L + a1 + a0 y (t ) = 0 齐次微分方程: 齐次微分方程: an n ( n −1) dt dt dt an s n + an −1s n −1 + L + a1s + a0 = 0 设系统k 设系统k个实根
自动控制原理课后习题答案

自动控制原理课后习题答案(总26页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除第一章引论1-1 试描述自动控制系统基本组成,并比较开环控制系统和闭环控制系统的特点。
答:自动控制系统一般都是反馈控制系统,主要由控制装置、被控部分、测量元件组成。
控制装置是由具有一定职能的各种基本元件组成的,按其职能分,主要有给定元件、比较元件、校正元件和放大元件。
如下图所示为自动控制系统的基本组成。
开环控制系统是指控制器与被控对象之间只有顺向作用,而没有反向联系的控制过程。
此时,系统构成没有传感器对输出信号的检测部分。
开环控制的特点是:输出不影响输入,结构简单,通常容易实现;系统的精度与组成的元器件精度密切相关;系统的稳定性不是主要问题;系统的控制精度取决于系统事先的调整精度,对于工作过程中受到的扰动或特性参数的变化无法自动补偿。
闭环控制的特点是:输出影响输入,即通过传感器检测输出信号,然后将此信号与输入信号比较,再将其偏差送入控制器,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。
闭环系统与开环系统比较的关键,是在于其结构有无反馈环节。
1-2 请说明自动控制系统的基本性能要求。
答:自动控制系统的基本要求概括来讲,就是要求系统具有稳定性、快速性和准确性。
稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。
稳定性通常由系统的结构决定与外界因素无关。
对恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值(例如恒温控制系统)。
对随动系统,被控制量始终跟踪参量的变化(例如炮轰飞机装置)。
快速性是对过渡过程的形式和快慢提出要求,因此快速性一般也称为动态特性。
在系统稳定的前提下,希望过渡过程进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差过大,合理的设计应该兼顾这两方面的要求。
准确性用稳态误差来衡量。
在给定输入信号作用下,当系统达到稳态后,其实际输出与所期望的输出之差叫做给定稳态误差。
机械控制工程基础第五章 练习习题及 解答
机械控制工程基础第五章练习习题及解答习题一题型:选择题题目:关于系统稳定的说法错误的是【】A.线性系统稳定性与输入无关B.线性系统稳定性与系统初始状态无关C.非线性系统稳定性与系统初始状态无关D.非线性系统稳定性与系统初始状态有关分析与提示:线性系统稳定性与输入无关;非线性系统稳定性与系统初始状态有关。
答案:C习题二题型:填空题题目:判别系统稳定性的出发点是系统特征方程的根必须为或为具有负实部的复数,即系统的特征根必须全部在是系统稳定的充要条件。
分析与提示:判别系统稳定性的出发点是系统特征方程的根必须为负实数或为具有负实部的复数,即系统的特征根必须全部在复平面的左半平面是系统稳定的充要条件。
答案:负实数、复平面的左半平面习题三题型:选择题题目:一个线性系统稳定与否取决于【】A.系统的结构和参数B.系统的输入C.系统的干扰D.系统的初始状态分析与提示:线性系统稳定与否取决于系统本身的结构和参数。
答案:A习题四题型:填空题题目:若系统在的影响下,响应随着时间的推移,逐渐衰减并回到平衡位置,则称该系统是稳定的分析与提示:若系统在初始状态的影响下(零输入),响应随着时间的推移,逐渐衰减并趋向于零(回到平衡位置),则称该系统是稳定的;反之,若系统的零输入响应发散,则系统是不稳定的。
答案:初始状态习题五题型:填空题题目:系统的稳定决定于的解。
分析与提示:系统的稳定决定于特征方程的解。
答案:特征方程习题一题型:填空题题目:胡尔维兹(Hurwitz)判据、劳斯(Routh)判据又称为判据。
分析与提示:胡尔维兹(Hurwitz)判据、劳斯(Routh)判据,又称为代数稳定性判据。
答案:代数稳定性习题二题型:填空题题目:利用胡尔维兹判据,则系统稳定的充要条件为:特征方程的各项系数均为;各阶子行列式都。
分析与提示:胡尔维兹判据系统稳定的充要条件为:特征方程的各项系数均为正;各阶子行列式都大于零。
答案:正、大于零习题三题型:计算题题目:系统的特征方程为2s4?s3?3s2?5s?10?0用胡尔维兹判据判别系统的稳定性。
现代控制理论课后习题答案
前言本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。
本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。
由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。
书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。
由于时间比较仓促,可能存在错误,请读者批评、指正。
另外有些题目解法和答案并不唯一,这里一般只给出一种解法和答案。
编者 2005年5月第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
现代控制理论课后答案(俞立)第五章
《现代控制理论》第5章习题解答5.1 已知系统的状态空间模型为Cx y Bu Ax x =+=, ,画出加入状态反馈后的系统结构图,写出其状态空间表达式。
答:具有状态反馈的闭环系统状态空间模型为:u Kx =−+v ()xA BK x Bv y Cx=−+=相应的闭环系统结构图为闭环系统结构图5.2画出状态反馈和输出反馈的结构图,并写出状态反馈和输出反馈的闭环系统状态空间模型。
答:具有状态反馈的闭环系统状态空间模型为u Kx =−+v ()xA BK x Bv y Cx=−+=相应的反馈控制系统结构图为具有输出反馈的闭环系统状态空间模型为u Fy =−+v ()x A BFC x Bv y Cx=−+=相应的反馈控制系统结构图为后案网 ww w.kh d5.3 状态反馈对系统的能控性和能观性有什么影响?输出反馈对系统能控性和能观性的影响如何?答:状态反馈不改变系统的能控性,但不一定能保持系统的能观性。
输出反馈不改变系统的能控性和能观性。
5.4 通过检验能控性矩阵是否满秩的方法证明定理5.1.1。
答:加入状态反馈后得到闭环系统K S ,其状态空间模型为()x A BK x Bv y Cx=−+=开环系统的能控性矩阵为0S 1[,][]n c A B BAB A B −Γ="闭环系统K S 的能控性矩阵为 1[(),][()()]n cK A BK B B A BK B A BK B −Γ−=−−"由于222()()()()(A BK B AB BKBA BKB A ABK BKA BKBK B)A B AB KB B KAB KBKB −=−−=−−+=−−−#以此类推,总可以写成的线性组合。
因此,存在一个适当非奇异的矩阵U ,使得()m A BK B −1,,,m m A B A B AB B −[(),][,]cK c A BK B A B U Γ−=Γ由此可得:若rank([,])c A B n Γ=,即有个线性无关的列向量,则n [(),]cK A BK B Γ−也有个线性无关的列向量,故n rank([(),])cK A BK B n Γ−=5.5 状态反馈和输出反馈各有什么优缺点。
《现代控制理论》刘豹著(第3版)课后习题答案(最完整版)

第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp n p b1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
第5章控制系统的稳定性分析
设系统闭环传递函数为
Y (s) X (s)
bm sm an s n
bm1sm1 an1sn1
则系统的特征方程为
b1s b0 a1s a0
ansn an-1sn-1 a1s a0 0
(5-5)
例 某单位反馈系统的开环传递函数 G(s) k
则系统的闭环传递函数
s(Ts 1)
(5-7)
a0
an
s1s2 s3 s4
sn2 sn1sn
从式(5-7)可知,要使全部特征根s1, s2,···, sn-1,sn均具有负实部,就必须满足以下两个条件:
(1)特征方程的各项系数ai(i=0,1,2, ···,n) 都不等于零。因为若有一个系数为零,则必出 现实部为零的特征根或实部有正有负的特征根, 才能满足式(5-7) 。此时系统为临界稳定(根 在虚轴上)或不稳定(根的实部为正)。
均不为零。
2. 特征方程的各项系数ai符号一致。
以上只是判定系统稳定的必要条件,而非充要条件, 因为此时还不能排除有不稳定根的存在。
罗斯稳定判据可以用来校验特征方程是否满足系 统稳定的充分条件。罗斯判据的证明比较麻烦, 这里只介绍它的应用。
特征方程系数的罗斯阵列如下:
sn an an-2 an-4 an-6
图示小球处在a点时,是稳定平衡点,因为作用 于小球上的有限干扰力消失后,小球总能回到a 点,而小球处于b、c点时为不稳定平衡点, 因 为只要有干扰力作用于小球,小球便不再回到 点b或c点。
c
b
a 小球的稳定性
上述两个实例说明系统的稳定性反映在干扰消 失后的过渡过程的性质上。这样,在干扰消失 的时刻,系统与平衡状态的偏差可以看作是系 统的初始偏差。
第五章 控制系统的稳定性分析(含习题答案)

f1 g1
劳斯阵列
注意:如果劳斯阵列第一列元素的符号不全 相同,则该列元素符号变化的次数,就是特 征方程所含实部为正的根的数目。
劳斯判据使用说明: ( 1)用一个正数去乘或除劳斯阵的某一整行,不会改变稳定性的结论。
4 3 2 例5-1 设控制系统的特征方程式为:D s s 8s 17 s 16s 5 0
Bl e
l 1
sin l t l Dr t r e r t sin r t r
r 0
n4 1
n2重实根
s pk
n3对不同的共轭复数根 s l jl
结论:控制系统稳定的充分必要条件:系统特征方程式的根全部具 有负实部。
5. 2 系统稳定的充要条件
s3, 4 2 j
系统特征方程具有两对共轭虚根,系统处于临界稳定。(不稳定,对应的 暂态分量为等幅振荡。)
劳斯判据使用说明:
例 5-3 : 已知单位反馈控制系统的开环传递函数为:G s 试应用劳斯判据判断预使系统稳定的K的取值范围。 解:根据题意,可得系统的闭环传递函数为:
K s s 2 s 1 s 2
大范围稳定:系统稳定与否,与初始偏差的大小无关。 小偏差稳定:初始偏差不超过一定范围的情况下,系统是稳定的。
5. 2 系统稳定的充要条件
一、系统稳定条件分析
系统扰动输入到输出之间的传递函数:
Xo s G2 s b0 s m b1s m 1 bm 1s bm M s N s 1 G1 s G2 s H s a0 s n a1s n 1 an 1s an D s
C s D s
闭环传递函数的特征方程:D(s)=0,特征方程的根即系统传递函数的极点。
控制工程基础课后习题答案

详细描述
通过调整系统的传递函数,可以改变系统的 频率响应特性。在设计控制系统时,我们需 要根据实际需求,调整传递函数,使得系统 的频率响应满足要求。例如,如果需要提高 系统的动态性能,可以减小传递函数在高频 段的增益。
06 第五章 控制系统的稳定性 分析
习题答案5-
习题答案
• 习题1答案:该题考查了控制系统的基本概念和组成。控制系统的基本组成包 括被控对象、传感器、控制器和执行器等部分。被控对象是实际需要控制的物 理系统或设备;传感器用于检测被控对象的输出状态,并将检测到的信号转换 为可处理的电信号;控制器根据输入的指令信号和传感器的输出信号,按照一 定的控制规律进行运算处理,并输出控制信号给执行器;执行器根据控制信号 对被控对象进行控制操作,使其达到预定的状态或性能要求。
控制工程基础课后习题答案
目 录
• 引言 • 第一章 控制系统概述 • 第二章 控制系统的数学模型 • 第三章 控制系统的时域分析 • 第四章 控制系统的频域分析 • 第五章 控制系统的稳定性分析 • 第六章 控制系统的校正与设计
01 引言
课程简介
01
控制工程基础是自动化和电气工 程学科中的一门重要课程,主要 涉及控制系统的基本原理、分析 和设计方法。
总结词
控制系统校正的概念
详细描述
控制系统校正是指在系统原有基础上,通过加入适当的 装置或元件,改变系统的传递函数或动态特性,以满足 性能指标的要求。常见的校正方法有串联校正、并联校 正和反馈校正等。校正装置通常安装在系统的某一环节 ,以减小对系统其他部分的影响。
习题答案6-
总结词
控制系统设计的一般步骤
习题答案5-
总结词
自动控制理论 自考 习题解答第5章稳定性分析

第五章 稳定性分析5—1 解:(1) 系统的特征方程为020)1(212=++⇒=++s s s s 。
因为二阶特征方程的所有项系数大于零,满足二阶系统的稳定的充分必要条件,即两个特征根均在S 平面的左半面,所以此系统稳定。
(2) 系统的特征方程为030)1(312=+-⇒=-+s s s s 。
因为二阶特征方程的项系数出现异号,不满足二阶系统的稳定的充分必要条件,所以此系统不稳定。
(注:BIBO 稳定意旨控制系统的输入输出(外部)稳定,系统稳定的充分必要条件是输出与输入之间传递函数的极点均在S 平面的左半平面。
若传递函数无零极点对消现象时,内部稳定与外部稳定等价。
此系统只含极点不含零点,所以传递函数的极点和特征方程的特征根等价,故直接可以用特征根的位置判系统的稳定性。
) 5—2 解: (1)Θ特征方程中所有项系数大于零,满足稳定的必要条件;又Θ三阶系统的系数内项乘积大于外项乘积(5011020⨯>⨯),满足稳定的充分条件。
∴ 该控制系统稳定。
(2)Θ特征方程中所有项系数大于零,满足稳定的必要条件;Θ特征方程中所有项系数大于零,满足稳定的必要条件;列写Routh故系统有两个特征根在S平面的右半部。
(3)Θ特征方程中所有项系数大于零,满足稳定的必要条件;又Θ三阶系统的系数内项乘积小于外项乘积(30020⨯⨯),不满足<81稳定的充分条件。
∴该控制系统不稳定。
(4)Θ特征方程中所有项系数大于零,满足稳定的必要条件;稳定。
由于第一列元素符号变化两次,系统特征根有两个在右半平面,其它4个根在左半平面。
(5)Θ特征方程中所有项系数大于零,满足稳定的必要条件;不稳定。
由于表中出现全为0的行,为确定特征根的分布可构造辅助方程012048402324,43324=+⇒=+⇒=++=s s s s s s k利用辅助方程的导数方程的对应项系数代替全零行元素,继续完成表的列写。
结果:第一列元素无负数,右半平面无根,有4个根在虚轴上。
《自动控制原理》 第五章习题解答

5-2 若系统单位阶跃响应为
h(t) = 1−1.8e −4t + 0.8e −9t
试确定系统的频率特性。 解:对单位阶跃响应取拉氏变换得:
1 − 1.8 + 0.8 =
36
s s + 4 s + 9 s(s + 4)(s + 9)
(t ≥ 0)
即: C(s) = G(s) =
K,T1,T2 > 0
当取ω = 1时, ∠G( jω ) = −1800 , G( jω ) = 0.5 。当输入为单位速度信号时,系统的稳
态误差为 0.1,试写出系统开环频率特性表达式。
解: KV
= lim sG(s) = s→0
K
= 10
当ω = 1时 G( jω ) = K (T2ω )2 + 1 = 10 (T2 )2 + 1 = 0.5
T2
=
1 20
T1 = 20
T1
=
1 T2
代入到
G(
j)
=
10
(T2 )2 + 1 (T1 )2 + 1
=
0.5 中得到:
所以系统的开环传递函数为: G(s) = 10(−s / 20 + 1) s(20s + 1)
系统开环频率特性表达式为: G( jω ) = 10(− jω / 20 + 1) jω(20 jω + 1)
ω
2 n
=1
(ω
2 n
− 1)
+
(2ζω n )2
∠GB
(
jω
)
=
−
arctan
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
s pj n1个不同的实根
s r jr n4对相同的复数根
n1
n2 1
n3
n4 1
xo t
Aj
e
p
jt
Ckt k e pkt
Blelt sin lt l
Drt rert sin rt r
j 1
描述系统扰动输入到输出之间关系的微分方程
a0
dn xo t
dt n
a1
dn1xo t
dt n1
an1
dxo t
dt
an xo
t
dmn t dm1n t
dnt
b0 dtm b1 dtm1 bm1 dt bmn t
扰动消失后,n(t)=0,系统自由振荡输出的响应相函数:
a0sn a1sn1 an1s an X o s C s 0
a2 a4 a6 a3 a5 a7 b2 b3 b4 c2 c3 c4
e2
劳斯阵列
b1
a1a2
a0a3 a1
c1
b1a3
a1b2 b1
b2
a1a4
a0a5 a1
c2
b1a5 a1b3 b1
b3
a1a6
a0a7 a1
c3 b1a7 a1b4 b1
注意:如果劳斯阵列第一列元素的符号不全 相同,则该列元素符号变化的次数,就是特 征方程所含实部为正的根的数目。
劳斯判据使用说明:
(1)用一个正数去乘或除劳斯阵的某一整行,不会改变稳定性的结论。
例5-1 设控制系统的特征方程式为:D s s4 8s3 17s2 16s 5 0
试应用劳斯判据判断系统的稳定性。
解:由方程系数均为正,可知已满足稳定的必要条件。列写劳斯阵列:
s4 1 17 5 s3 8 16 s2 15 5 s1 40 3 s0 5
闭环传递函数的极点全部在s平面的左半平面。
s pj n1个不同的实根
s r jr n4对相同的复数根
n1
n2 1
n3
n4 1
xo t
Aj
e
p
jt
Ckt k e pkt
Blelt sin lt l
Drt rert sin rt r
j 1
k 0
l 1
r 0
n2重实根 s pk
1 17
8 1615 5
40 3 0 5
40 3
8 16
15 5 40
15
3
由劳斯阵列的第一列可见,第一列中的系数符号全为正,所以该系统 稳定。
劳斯判据使用说明:
(2)劳斯阵第一列所有系数均不为零,但也不全为正数的情况下,特 征方程式具有正实根或实部为正的共轭复数根的数目,等于第一列系数
第五章 控制系统的稳定性分析
5-1 控制系统稳定性的概念 5-2 控制系统稳定的充要条件 5-3 代数稳定判据(劳斯判据和赫尔维茨) 5-4 乃奎斯特稳定判据 5-5 延时系统的稳定性分析 5-6 由伯德图判断系统稳定性 5-7 控制系统的相对稳定性
5. 1 控制系统稳定性的基本概念
稳定:如果系统受扰动作用偏离原平衡状态,而当扰动消失后,经过充 分长的时间,系统能以一定的精度逐渐恢复到原来的状态,则称系统是 稳定的;否则称系统是不稳定的。
k 0
l 1
r 0
n2重实根 s pk
n3对不同的共轭复数根
s l jl
结论:控制系统稳定的充分必要条件:系统特征方程式的根全部具 有负实部。
5. 2 系统稳定的充要条件
二、控制系统稳定的充分必要条件
特征方程:Ds 0
系统特征方程式的根全部具有负实部。
系统闭环传递函数的极点全部具有负实部。
Cs Xo s Ds
零初始状态下的拉氏 变换。闭环传递函数 的分母多项式D(s)。
与初始偏差状态相关的拉氏变换部分
L
dn f dt
t
n
snF
s
s n 1
f
0
sn2
f
0
sf
n2
0
f
n1 0
5. 2 系统稳定的充要条件
Cs 扰动消失后,n(t)=0,系统自由振荡输出响应的相函数: Xo s D s
稳定衰减过程
临界(不)稳定振荡过程
不稳定发散过程
注意:控制理论研究的稳定性是指自由振荡下的稳定性,讨论自由振荡 是收敛,还是发散,即讨论零输入响应是否收敛。
5. 1 控制系统稳定性的基本概念
稳定:若控制系统在任何足够小的偏差的作用下,其过渡过程随着时 间的推移,逐渐衰减并趋于零,具有恢复原平衡状态的性能,则称系 统稳定;否则称该系统不稳定。 稳定平衡点:扰动消失后,经过自由振荡,能得到恢复的平衡点。 不稳定平衡点:扰动消失后,不能恢复的平衡点。
闭环传递函数
D s a0sn a1sn1 an1s an 0 ——特征方程
劳斯判据:线性系统稳定的充分必要条件是:特征方程的各项系数ai 均为正值(ai>0) ,并且由特征方程系数组成的劳斯阵列的第一列 系数也为正值。
sn a0 sn1 a1 sn2 b1 sn3 c1
s2 e1 s1 f1 s0 g1
正实根(-pj),对应项随时间单调增长。 零根,对应一个常数项,系统可在 任何状态下平衡。
n3对不同的共轭复数根
s l jl
实部为正的复数根(-δ±jω),对应项 随时间作周期发散振荡。 共轭虚根,对应项为等幅周期振荡。
5. 2 代数稳定判据
一、劳斯判据
X o s b0sm b1sm1 bm1s bm X i s a0sn a1sn1 an1s an
符号改变的次数。
例5-2 设控制系统的特征方程式为:D s s4 2s3 3s2 4s 3 0
试应用劳斯判据判断系统的稳定性。
解:由方程系数均为正,可知已满足稳定的必要条件。列写劳斯阵列: s4 1 3 3 s3 2 4 s2 1 3 s1 2 s0 3
由劳斯阵列可见,第一列中的系数符号不全为正,所以系统不稳 定。另外,第一列中的系数符号改变两次(+1->-2->+3),说明闭环 系统有两个正实部的根,即在s右半平面内有两个闭环极点。
大范围稳定:系统稳定与否,与初始偏差的大小无关。 小偏差稳定:初始偏差不超过一定范围的情况下,系统是稳定的。
5. 2 系统稳定的充要条件
一、系统稳定条件分析
系统扰动输入到输出之间的传递函数:
Xo s
G2 s
b0sm b1sm1 bm1s bm M s
N s 1 G1 s G2 s H s a0sn a1sn1 an1s an D s