柱面坐标变换
三重积分柱面坐标变换公式
三重积分柱面坐标变换公式在进行三重积分运算时,柱面坐标变换是一种常用的方法,可以简化积分的计算过程。
柱面坐标通常用于描述空间中的圆柱体或圆锥体问题,因此对于涉及到这些几何形状的三重积分问题,柱面坐标的应用是非常有用的。
柱面坐标的定义柱面坐标是一种三维坐标系,其中一个点的位置由径向距离、极角和高度三个参数决定。
在柱面坐标系中,通常用(ρ,φ,z)表示一个点的位置,其中ρ 表示点到 z 轴的距离,φ 表示点在 xy 平面上的极角,z 表示点在 z 轴上的高度。
三重积分的柱面坐标变换公式假设在三维空间中有一个函数f(ρ, φ, z),我们要计算其在柱面坐标系下的三重积分。
此时,需要进行坐标变换以便在柱面坐标系下进行积分计算。
三重积分的柱面坐标变换公式如下:$$ \\iiint f(ρ, φ, z) dV = \\iiint f(ρ, φ, z) ρ dz dρ dφ $$其中,dV 表示体积元素,ρ 从 0 到ρ,φ 从 0 到2π, z 的范围由具体问题决定。
柱面坐标变换公式的应用举例举一个简单的例子来说明柱面坐标变换的应用。
假设有一个函数f(ρ, φ, z) =ρ^2,我们要计算其在半径为 1,高度为 2 的圆柱体内的体积。
根据柱面坐标变换公式,可以得到:$$ \\iiint f(ρ, φ, z) dV = \\int_{0}^{2π} \\int_{0}^{1} \\int_{0}^{2} (ρ^2) ρ dz dρ dφ $$经过计算可得最终结果为8π/3。
结语柱面坐标变换公式在处理涉及柱面形状的三重积分问题时具有重要作用,能够简化积分计算过程,提高计算效率。
熟练掌握柱面坐标变换公式对于解决相关数学问题是非常有帮助的。
希望本文所介绍的柱面坐标变换公式能够对你的数学学习有所帮助。
柱面坐标变换和球面坐标变换

柱面坐标变换和球面坐标变换
在数学和物理学中,柱面坐标和球面坐标是描述空间中点位置的两种不同坐标系。
通过对这两种坐标系进行变换,可以在不同问题中更好地描述和分析相关的物理现象。
柱面坐标变换
柱面坐标通常用于描述平面内的点位置,其坐标形式为(r, θ, z),其中r是点到z轴的距离,θ是与x轴的夹角,z是点在z轴上的投影位置。
柱面坐标与直角坐标系之间的变换关系如下:
假设直角坐标系中的点为(x, y, z),柱面坐标系中的点为(r, θ, z),则有以下变换关系:
r = √(x^2 + y^2)
θ = arctan(y/x)
z = z
柱面坐标变换在解决某些旋转对称问题时非常有用,比如圆柱体或圆锥体的体积计算和空间内的电场分布等问题。
球面坐标变换
球面坐标通常用于描述空间中的点位置,其坐标形式为(r, θ, φ),其中r是点到原点的距离,θ是与x轴的夹角,φ是与z轴的夹角。
球面坐标与直角坐标系之间的变换关系如下:
假设直角坐标系中的点为(x, y, z),球面坐标系中的点为(r, θ, φ),则有以下变换关系:
r = √(x^2 + y^2 + z^2)
θ = arctan(y/x)
φ = arccos(z/r)
球面坐标变换在处理一些涉及球形对称性问题时非常有用,比如天文学中的行星运动和化学中的原子排列等问题。
综上所述,柱面坐标变换和球面坐标变换是描述空间中点位置的两种重要坐标系,它们在解决不同问题中起着关键作用。
通过深入理解两种坐标系之间的变换关系,我们可以更好地解释和分析物理现象,并在应用中更加灵活地使用不同的坐标系来描述问题。
柱面坐标变换和球面坐标变换一样吗
柱面坐标变换和球面坐标变换一样吗在数学和物理学领域,柱面坐标和球面坐标是常用的坐标系,它们在描述空间中的点和矢量时发挥着重要的作用。
虽然柱面坐标和球面坐标都是三维空间中的坐标系统,但它们之间存在一些显著的不同之处。
柱面坐标变换柱面坐标系是一个应用广泛的坐标系,其中一个点的位置由径向距离、极角和高度组成。
在柱面坐标系中,点的坐标表示为$(r, \\theta, z)$,其中r是点到z轴的距离,$\\theta$是与x轴的夹角,z是点到xy平面的距离。
柱面坐标系到直角坐标系的变换公式如下:$$ \\begin{aligned} x & = r \\cdot \\cos(\\theta) \\\\ y & = r \\cdot\\sin(\\theta) \\\\ z & = z \\end{aligned} $$球面坐标变换球面坐标系是另一种常用的坐标系,其中一个点的位置由半径、极角和方位角组成。
在球面坐标系中,点的坐标表示为$(\\rho, \\phi, \\theta)$,其中$\\rho$是点到原点的距离,$\\phi$是点到z轴的夹角,$\\theta$是与x轴的夹角。
球面坐标系到直角坐标系的变换公式如下:$$ \\begin{aligned} x & = \\rho \\cdot \\sin(\\phi) \\cdot \\cos(\\theta) \\\\ y & = \\rho \\cdot \\sin(\\phi) \\cdot \\sin(\\theta) \\\\ z & = \\rho \\cdot\\cos(\\phi) \\end{aligned} $$比较与总结尽管柱面坐标和球面坐标都用于描述三维空间中的点,但它们之间有一些显著的不同。
柱面坐标主要用于旋转对称的问题,球面坐标则适用于球对称的问题。
在坐标变换公式中,柱面坐标的r是一个平面距离,而球面坐标的$\\rho$是一个空间距离。
柱面坐标变换公式推导过程是什么

柱面坐标变换公式推导过程是什么在数学和物理学中,柱面坐标系是一种常用的坐标系,它是平面极坐标系的三维扩展。
在柱面坐标系中,我们用径向距离、方位角和高度来描述空间中的点。
坐标系介绍柱面坐标系中,一个点的位置由三个坐标确定: - r:点到z轴的直线距离(径向距离) - $\\phi$:点在x-y平面上的投影与x轴的夹角(方位角) - z:点在z轴上的高度这三个坐标$(r, \\phi, z)$描述了三维空间中的一个点的位置。
坐标变换公式推导过程从直角坐标系到柱面坐标系的变换令$x = r\\cos(\\phi)$, $y = r\\sin(\\phi)$,可得 - $r = \\sqrt{x^2 + y^2}$ - $\\phi = \\arctan\\left(\\frac{y}{x}\\right)$根据z轴高度不变,z=z,所以直角坐标系到柱面坐标系的变换可以表示为:$$ \\begin{cases} r = \\sqrt{x^2 + y^2} \\\\ \\phi =\\arctan\\left(\\frac{y}{x}\\right) \\\\ z = z \\end{cases} $$从柱面坐标系到直角坐标系的变换直角坐标系到柱面坐标系的变换是一个非线性变换,可以使用雅可比矩阵来表示。
考虑柱面坐标$(r, \\phi, z)$到直角坐标(x,y,z)的变换,我们有:$$ \\begin{bmatrix} x \\\\ y \\\\ z \\end{bmatrix} = \\begin{bmatrix}r\\cos(\\phi) \\\\ r\\sin(\\phi) \\\\ z \\end{bmatrix} $$其中,雅可比矩阵为:$$ J = \\begin{bmatrix} \\cos(\\phi) & -r\\sin(\\phi) & 0 \\\\ \\sin(\\phi) & r\\cos(\\phi) & 0 \\\\ 0 & 0 & 1 \\end{bmatrix} $$柱面坐标系下的梯度算子与拉普拉斯算子在柱面坐标系中,梯度算子和拉普拉斯算子的表达式为: - 梯度算子:$$ \ abla f = \\frac{\\partial f}{\\partial r}\\mathbf{e}_r +\\frac{1}{r}\\frac{\\partial f}{\\partial \\phi}\\mathbf{e}_\\phi + \\frac{\\partial f}{\\partial z}\\mathbf{e}_z $$- 拉普拉斯算子:$$ \\Delta f = \\frac{1}{r}\\frac{\\partial}{\\partial r}\\left(r\\frac{\\partial f}{\\partial r}\\right) + \\frac{1}{r^2}\\frac{\\partial^2 f}{\\partial \\phi^2} + \\frac{\\partial^2 f}{\\partial z^2} $$结论本文介绍了柱面坐标系的定义,并推导了从直角坐标系到柱面坐标系的变换公式,以及柱面坐标系下的梯度算子和拉普拉斯算子的表达式。
柱面坐标变换
柱面坐标变换一、概述柱面坐标变换是一种将三维空间中的点从直角坐标系转换到柱面坐标系的方法。
在计算机图形学和计算机视觉等领域中,柱面坐标变换被广泛应用于图像处理、目标跟踪、物体识别等方面。
二、柱面坐标系柱面坐标系是一种常见的三维坐标系,它由径向距离$r$、极角$\theta$和高度$h$三个参数组成。
在柱面坐标系中,一个点$(x,y,z)$可以表示为$(r,\theta,h)$,其中$r=\sqrt{x^2+y^2}$,$\theta=\arctan(\frac{y}{x})$,$h=z$。
三、直角坐标系到柱面坐标系的转换将直角坐标系中的点$(x,y,z)$转换到柱面坐标系中需要进行以下步骤:1. 计算径向距离$r$$$r=\sqrt{x^2+y^2}$$2. 计算极角$\theta$$$\theta=\arctan(\frac{y}{x})$$需要注意的是,在计算$\theta$时需要考虑$x$和$y$的符号。
当$x>0,y>0$时,$\theta=\arctan(\frac{y}{x})$;当$x<0,y>0$时,$\theta=\pi+\arctan(\frac{y}{x})$;当$x<0,y<0$时,$\theta=-\pi+\arctan(\frac{y}{x})$;当$x>0,y<0$时,$\theta=\arctan(\frac{y}{x})$。
3. 计算高度$h$$$h=z$$四、柱面坐标系到直角坐标系的转换将柱面坐标系中的点$(r,\theta,h)$转换到直角坐标系中需要进行以下步骤:1. 计算$x$和$y$$$x=r\cos\theta$$$$y=r\sin\theta$$2. 计算$z$$$z=h$$五、应用举例柱面坐标变换在计算机视觉和计算机图形学中有着广泛的应用。
以下是一些常见的应用举例:1. 图像处理:在图像处理中,柱面坐标变换可以用于纠正鱼眼镜头等广角镜头畸变问题。
柱坐标、球坐标下的三重积分

解:由图知:直角系:
D
y
x
2
4 x2
6x2 y2
I dx
dy
f (x, y, z)dz
2
4x2
x2 y2
柱标系: I
2
d
2
rdr
6r 2
f (r cos , r sin , z)dz
0
0
r
杂例
在三种坐标系下化三重积分 f (x, y, z)dv为三次积分,
z
其中:z 6 x2 y2, z x2 y2 z 6 x2 y2 6
四、柱坐标、球坐标下的三重积分
1. 柱坐标:(θ,r,z)
zz
变换为:x r cos , y r sin , z z
即:(x, y, z) (r cos , r sin , z),其中:
0 r ,0 2 ,| J || (x, y, z) | r ( , r, z)
x
注:柱坐标— 极坐标平面竖起一根Z轴。x
上顶: z 1 x2 y2
下底: z = 0
z
Dxy: x 2 y 2 1
x y
I dxdy
zdz
Dxy
用哪种坐标? 柱面坐标 .
.
2π
1
1r 2
I = 0 dθ 0 rdr0 zdz
Dxy 0
1
4
x
z0
1y
注:用柱坐标求 fdv分成两个步骤:
第一步:先一后二,对z积分后将二重积分化为极坐 标下的二重积分;
元素区域由六个坐标面围成:
半平面及+d ;
半径为r及 r+dr的园柱面;
平面 z及 z+dz;
dz
8.3.1 三重积分-直角坐标系切片法,柱面坐标系
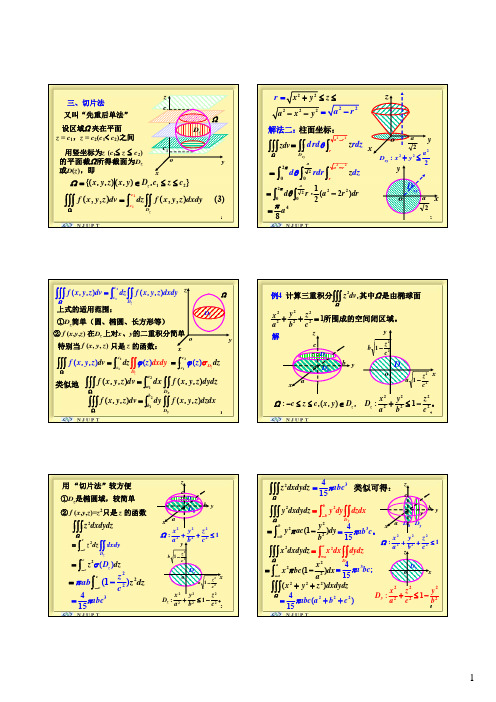
三、切片法又叫“先重后单法”设区域Ω夹在平面z =c 1,z =c 2(c 1<c 2)之间Ω1c 2c z用竖坐标为z c ≤z ≤c zD 1},),(),,{(21c z c D y x z y x z ≤≤∈=Ωyxo (12)的平面截Ω所得截面为D z 或D (z ),即21(,,)(,,) (3)zc c D f x y z dv dz f x y z dxdy Ω=⎰⎰⎰⎰⎰⎰柱解法二:面坐标:⎰⎰⎰zdv ∙yzxo2a 2a 22222x y z a x y +≤≤--22a r=-r =22r ra z d rd rdz θ-=⎰⎰⎰22a yxo⎰⎰-⋅=202220)2(21a dr r a r d πθΩ48a π=xyD 22:2xy D x y +≤xyD 22220a r ra z d rdr dzπθ-=⎰⎰⎰ΩzyozD ⎰⎰⎰⎰⎰⎰=zD c c dxdy z y x f dz dv z y x f ),,(),,(21Ω特别当f (x , y , z ) 只是z 的函数:②f (x ,y ,z ) 在D z 上对x 、y 的二重积分简单①D z 简单(圆、椭圆、长方形等)上式的适用范围:3x类似地⎰⎰⎰⎰⎰⎰=ΩxD a adydzz y x f dx dv z y x f ),,(),,(21⎰⎰⎰⎰⎰⎰=ΩyD b bdzdxz y x f dy dv z y x f ),,(),,(2121(,,)()zc c D dxd dv d f y z y x z z ϕΩ=⎰⎰⎰⎰⎰⎰21()z c c D z dzϕσ=⎰解2222222,14z dv y z x a b c ΩΩ++=⎰⎰⎰计算三重积分其中是由椭球面所围成的空间例闭区域。
zc y 21z b -4,),(,:z D y x c z c ∈≤≤-Ω。
2222221:c z b y a x D z -≤+D 0D z xyz ab o zD 221cz a -x o2c ⎰⎰⎰Ωdxdydzz 2D 0D z z x yz ab oc ①D z 是椭圆域,较简单②f (x ,y ,z )=z 2只是z 的函数用“切片法”较方便1:222222≤++cz b y a x Ω2cz 53154abcπ=zD 221c z a -yx o221c zb -。
柱面坐标变换和球面坐标变换适用于哪些情况

柱面坐标变换和球面坐标变换适用于哪些情况柱面坐标变换和球面坐标变换是在数学和物理学领域中常见的坐标转换方法,它们适用于不同的情况并提供了在不同坐标系统下描述物理现象的便利性。
柱面坐标变换的适用情况柱面坐标变换通常适用于描述平面或旋转对称性问题的情况。
其中,柱面坐标系由径向距离r、方位角$\\theta$和z坐标组成,适用于具有圆柱对称性或转动对称性的物体或问题。
在这种情况下,通过柱坐标变换可以简化问题的描述和求解过程。
在物理学中,柱面坐标变换常用于处理涉及旋转对称性的问题,如刚体转动、电场环境等。
当问题具有柱面对称性、轴对称性时,使用柱面坐标变换可以简化问题的数学表达和求解难度,使分析工作更加方便和高效。
球面坐标变换的适用情况球面坐标变换适用于描述具有球对称性的问题或物体的情况。
球面坐标系由径向距离r、极角$\\theta$和方位角$\\phi$组成,适用于描述球对称性的物体或问题,如原子分子、行星运动等。
在物理学和工程领域中,球面坐标变换常用于处理涉及球对称性的问题,如电子绕核运动、天体运动等。
当系统具有球对称性时,使用球面坐标变换可以简化问题的描述和计算过程,提高问题求解的效率和准确性。
总结柱面坐标变换和球面坐标变换是数学和物理学中常用的坐标变换方法,它们分别适用于描述具有平面对称性或旋转对称性问题以及球对称性问题的情况。
通过合适选择和应用这两种坐标变换,可以简化问题的描述、降低计算复杂度,提高问题求解的效率和准确性,为解决各种实际问题提供了重要的工具和方法。
以上是关于柱面坐标变换和球面坐标变换适用情况的简要介绍,希望对读者有所帮助。
在实际应用中,根据具体问题的特点选择合适的坐标系,并灵活运用坐标变换方法,将有助于更好地理解和解决问题。
柱面坐标系和球面坐标系的选择
柱面坐标系和球面坐标系的选择在数学和物理学领域,我们经常会遇到需要描述空间中点的位置的情况。
柱面坐标系和球面坐标系就是两种常见的坐标系,它们分别适用于不同的情境。
柱面坐标系柱面坐标系是一种三维坐标系,用$(r, \\theta, z)$表示,其中r代表点到z轴的距离,$\\theta$表示点在x−y平面上的极角,z表示点在垂直xy平面的高度。
柱面坐标系适合于描述具有轴对称特点的问题,比如圆柱体或旋转对称体的情况。
在这种坐标系下,坐标变换较为简单,方便处理。
球面坐标系球面坐标系是另一种常见的三维坐标系,用$(r, \\theta, \\phi)$表示,其中r代表点到原点的距离,$\\theta$表示点在x−y平面上的极角,$\\phi$表示点与z轴的夹角。
球面坐标系适合于描述球体或具有球对称特点的问题。
在球面坐标系下,很多问题会变得更加简单和对称。
如何选择在选择柱面坐标系和球面坐标系时,需要根据问题的特点进行判断。
如果问题具有轴对称性,或者是圆柱体的问题,那么柱面坐标系可能更为适合。
柱面坐标系下坐标变换简单,可以方便地处理这类问题。
如果问题具有球对称性,或者是关于球体的问题,那么球面坐标系可能是更好的选择。
通过球面坐标系,可以简化许多复杂的计算,使问题更容易解决。
在实际问题中,有时会涉及到需要两种坐标系结合来描述的情况,这时需要根据具体的需求来选择合适的坐标系进行描述,以便更好地解决问题。
在数学和物理学领域中,柱面坐标系和球面坐标系是非常常用的工具,正确的选择和使用将有助于更加高效地解决问题,更准确地描述空间中的点的位置。
以上是关于柱面坐标系和球面坐标系的选择的一些基本内容,希望对您有所帮助。
三重积分柱面坐标公式

三重积分柱面坐标公式在数学中,三重积分是在三维空间内计算函数体积时使用的一种方法。
当我们需要计算具有某种变量分布的三维空间中的体积时,三重积分是一个非常有用的工具。
柱面坐标系是一种常用的曲线坐标系,它特别适用于具有柱面对称性的问题。
在本文中,我们将讨论三重积分在柱面坐标系下的具体公式。
柱面坐标系柱面坐标系是一种由极坐标平面延伸而来的三维坐标系。
在柱面坐标系下,点的位置由径向(表示点到原点的距离)、方位角和高度三个参数确定。
柱面坐标系下的坐标变换公式如下:•$x = r \\cos(\\theta)$•$y = r \\sin(\\theta)$•z=z其中,r代表点到z轴的距离,$\\theta$为点到x轴的夹角,x、y、z分别代表三维空间中的坐标。
三重积分柱面坐标变换公式在使用柱面坐标系进行三重积分计算时,我们需要将被积函数和微元体用柱面坐标系表示,并对结果进行坐标变换。
对于柱面坐标系下的三重积分,其公式如下:$$ \\iiint_G f(x, y, z) \\, dxdydz = \\iiint_G f(r \\cos(\\theta), r \\sin(\\theta), z) \\cdot r \\, drd\\theta dz $$其中,f(x,y,z)为被积函数,G为函数定义的空间区域,r为涉及到的径向分量,$\\theta$为涉及到的方位角分量,z为涉及到的高度分量。
计算示例让我们来看一个具体的计算示例,计算函数f(x,y,z)=x2+y2+z2在半径为1、高度为2的圆锥体内的体积。
首先,根据柱面坐标系下积分的公式,我们有:$$ \\iiint_G (r^2 \\cos^2(\\theta) + r^2 \\sin^2(\\theta) + z^2) \\cdot r \\,drd\\theta dz $$然后,我们根据给定的圆锥体范围确定积分区域G,进行相应范围的积分计算,最终得到该圆锥体的体积。
柱面坐标变换

柱面坐标变换一、什么是柱面坐标?柱面坐标是一种二维坐标系统,用于描述平面上的点。
这个坐标系统由一个极坐标和一个直角坐标组成。
柱面坐标中,每个点由一个距离和一个角度来确定。
二、柱面坐标的表示方法柱面坐标通常以两个值的组合来表示一个点。
第一个值是距离,通常用r表示,表示该点到原点的距离。
第二个值是角度,通常用θ表示,表示该点与参考轴的夹角。
在柱面坐标中,通常还会加上一个额外的参数ℎ,用于表示点的高度。
这样,柱面坐标的表示方法就变成了(r,θ,ℎ)。
三、柱面坐标变换公式柱面坐标和直角坐标是可以相互转换的。
下面是柱面坐标变换为直角坐标的公式:1.x=rcosθ2.y=rsinθ3.z=ℎ直角坐标变换为柱面坐标的公式如下:1.r=√x2+y2)2.θ=arctan(yx3.ℎ=z四、柱面坐标的应用1. 物理学中的应用柱面坐标在物理学中有广泛的应用。
例如在力学中,它可以用来描述一个旋转物体的运动。
在电磁学中,它可以用来描述电场和磁场的分布。
2. 工程学中的应用在工程学中,柱面坐标也有一些应用。
例如在机械工程中,可以使用柱面坐标来描述圆柱体或圆锥体的形状和尺寸。
在建筑工程中,柱面坐标可以用来描述建筑物的柱子或圆柱形结构。
3. 计算机图形学中的应用在计算机图形学中,柱面坐标也被广泛应用。
例如在三维图形的渲染过程中,可以将柱面坐标转换为直角坐标,以便于计算光照效果。
4. 数学中的应用柱面坐标的应用还涉及到数学领域。
例如在计算曲线或曲面的长度、面积或体积时,可以使用柱面坐标的变换公式进行计算。
五、柱面坐标变换的优点和局限柱面坐标变换有一些优点和局限性。
其中的优点包括:1.柱面坐标可以简化一些问题的描述和计算过程;2.柱面坐标可以更直观地描述和理解一些物理现象;3.柱面坐标可以提供更多的坐标系统选择,以适应特定问题的需要。
然而,柱面坐标变换也有一些局限性:1.柱面坐标对于部分问题的描述可能会更加复杂;2.柱面坐标在一些特殊情况下会导致计算结果不稳定或不准确;3.柱面坐标的变换公式可能会相对复杂,需要一定的数学推导。
球坐标系和柱坐标系
球坐标系和柱坐标系球坐标系和柱坐标系是空间解析几何中常用的坐标系,它们可以用来描述三维空间中的点的位置和方向。
本文将介绍球坐标系和柱坐标系的定义、坐标变换以及其在不同领域的应用。
一、球坐标系球坐标系是一种三维坐标系,用来描述三维空间中的点的位置。
它由径向距离r、极角θ和方位角φ来确定一个点的坐标。
径向距离r表示点到坐标原点的距离,极角θ表示点与正z轴的夹角,方位角φ表示点在x-y平面上投影与正x轴的夹角。
在球坐标系中,一个点的坐标可以表示为(r,θ,φ)。
坐标变换公式如下:```x = r * sinθ * cosφy = r * sinθ * sinφz = r * cosθ```球坐标系常见于物理学、天文学和计算机图形学等领域的问题求解。
物理学中常用球坐标系描述粒子在空间中的位置和动量,能够简化很多问题的求解过程。
在天文学中,球坐标系可以用来描述星体的位置和运动轨迹。
二、柱坐标系柱坐标系是另一种常见的三维坐标系,适用于平面内与柱面有关的问题。
柱坐标系由极径ρ、极角θ和高度z来确定一个点的坐标。
极径ρ表示点到z轴的距离,极角θ表示点在x-y平面上的投影与正x轴的夹角,高度z表示点在z轴上的坐标。
柱坐标系中,一个点的坐标可以表示为(ρ,θ,z)。
坐标变换公式如下:```x = ρ * cosθy = ρ * sinθz = z```柱坐标系常见于物理学、工程学和流体力学等领域的问题求解。
在工程学中,柱坐标系常用于描述圆柱形结构的变形和应力分布,能够更直观地理解和解决与柱面相关的工程问题。
在流体力学中,柱坐标系可以用来描述圆柱形容器中的流体流动规律。
综上所述,球坐标系和柱坐标系是在三维空间中描述点的位置和方向的常用坐标系。
它们各自具有独特的特点和应用场景,在不同领域的问题求解中发挥着重要作用。
熟练掌握球坐标系和柱坐标系的定义和坐标变换公式,对于解决相关问题具有重要意义。
柱面坐标变换的函数行列式

柱面坐标变换的函数行列式柱面坐标是一种使用极坐标和笛卡尔坐标系的组合,通常用于描述具有旋转对称性的系统。
在物理学和工程学中,经常需要利用柱面坐标进行坐标变换,以便更有效地描述问题和简化计算。
在这篇文档中,我们将讨论柱面坐标变换的函数行列式,探讨其在坐标变换中的重要性和应用。
柱面坐标系简介柱面坐标系是一种三维坐标系,通常用于描述具有圆柱对称性的系统。
柱面坐标包括一个径向变量(表示离坐标原点的距离)、一个极角变量(表示与某一固定方向的夹角)、和一个轴向变量(表示在柱面上的高度)。
柱面坐标系的基向量为r(径向)、$\\theta$(极角)和z(轴向)。
柱面坐标系和笛卡尔坐标系的转换在进行柱面坐标变换时,我们需要利用某一点处基向量的偏导数构成的行列式。
考虑从柱面坐标系$(r, \\theta, z)$到笛卡尔坐标系(x,y,z)的变换,假设有柱面坐标系下的函数$f(r, \\theta, z)$,我们可以通过以下公式将其转换为笛卡尔坐标系下的函数:$$ f(x, y, z) = f(r, \\theta, z) = f(r\\cos\\theta, r\\sin\\theta, z) $$在这个变换中,我们需要计算柱面坐标系基向量的偏导数,以构成函数变换的行列式。
具体地,在从柱面坐标到笛卡尔坐标的转换中,行列式的计算如下:$$ \\frac{\\partial(x, y, z)}{\\partial(r, \\theta, z)} = \\begin{vmatrix}\\frac{\\partial x}{\\partial r} & \\frac{\\partial x}{\\partial \\theta} &\\frac{\\partial x}{\\partial z} \\\\ \\frac{\\partial y}{\\partial r} &\\frac{\\partial y}{\\partial \\theta} & \\frac{\\partial y}{\\partial z} \\\\\\frac{\\partial z}{\\partial r} & \\frac{\\partial z}{\\partial \\theta} &\\frac{\\partial z}{\\partial z} \\end{vmatrix} $$计算行列式1.计算$\\frac{\\partial x}{\\partial r}$和$\\frac{\\partial y}{\\partialr}$:根据笛卡尔坐标系与柱面坐标系的关系,我们有 $x = r\\cos\\theta$ 和 $y =r\\sin\\theta$,因此 $\\frac{\\partial x}{\\partial r} = \\cos\\theta$,$\\frac{\\partial y}{\\partial r} = \\sin\\theta$。
柱坐标变换的雅可比行列式

柱坐标变换的雅可比行列式柱坐标系是三维坐标系的一种,它以极坐标系和笛卡尔坐标系为基础,其三个坐标分量分别表示点的径向距离、仰角和方位角。
在求解某些函数的梯度、散度和旋度等问题中,使用柱坐标系可以更加方便和简洁。
而柱坐标变换的雅可比行列式则是柱坐标系中坐标变换的重要工具和判别条件。
柱坐标变换的雅可比行列式可以用来描述从一个坐标系到另一个坐标系的变换对函数积分测量的影响。
在柱坐标系中,雅可比矩阵为三阶正交矩阵,而雅可比行列式则可以用来计算变换后体积元的缩放因子。
具体地,设在柱坐标系下函数 $f(\rho, \theta, z)$,可得坐标变换$$\begin{cases}x &= \rho \sin \theta \\y &= \rho \cos \theta \\z &= z\end{cases}$$则该坐标变换的雅可比行列式为$$J=\begin{vmatrix}\dfrac{\partial x}{\partial \rho} & \dfrac{\partial x}{\partial \theta} & \dfrac{\partial x}{\partial z} \\\dfrac{\partial y}{\partial \rho} & \dfrac{\partial y}{\partial \theta} & \dfrac{\partial y}{\partial z} \\\dfrac{\partial z}{\partial \rho} & \dfrac{\partial z}{\partial \theta} & \dfrac{\partial z}{\partial z}\end{vmatrix}=\begin{vmatrix}\sin \theta & \rho \cos \theta & 0 \\\cos \theta & -\rho \sin \theta & 0 \\0 & 0 & 1\end{vmatrix}=-\rho$$因此,在柱坐标系下,体积元的缩放因子为 $-\rho$。
柱面坐标变换

柱面坐标变换容易得出,点M 的直角坐标),,(z y x 与柱坐标),,(z r θ之间的关系为:θc o s r x =,θsin r y =, z z =.下述三族曲面,称为柱面坐系中的坐标曲面:(¡)一族以oz 轴为对称轴的圆柱面:i r r=(常数),即222i r y x=+; (¡¡)一族通过oz 轴的半平面:i θθ=(常数),即i x y θtan =;(¡¡¡)一族通过oz 轴的半平面=z i z (常数),若用这三族坐标曲面把空间区域V 分成若干个小区域,这样所得到的小区域中,有规则的小区域(如图9-38)的体积为z S V ∆⋅≈∆扇形,由平面极坐标变换知,r r S ∆∆≈θ扇形,有 z r r V ∆∆∆≈∆θ,而),sin ,cos (),,(z r r f z y x f θθ=,于是 ⎰⎰⎰∆∑=→V v z y x f dv z y x f ),,(lim ),,(0λ ⎝⎛+∆∆∆=∑∑→规则区域不规则区域z y x f z r r z r r f ,,(),sin ,cos (lim 0θθθλ且∑=∆→不规则区域0),,(lim 0v z y x f λ,因此⎰⎰⎰⎰⎰⎰=vv dz rdrd z r r f dv z y x f θθθ),sin ,cos (),,(.这就是三重积分从直角坐标变换为柱面坐标的换元公式. 柱面坐标系中的体积元素为dz rdrd ϑ. 为了把上式右端化成累次积分,设平行于oz 轴的直线与区域V 的边界最多只有两个交点,设V 在oxy 平面上的投影区域为xy σ,把区域xy σ用ϑ,r 表示,区域V 关于oxy 平面的投影柱面将V 的边界曲面分为上、下两面部分,其方程表示为z 是ϑ,r 的函数,即 上曲面:),(2ϑr z z =, 下曲面:),(1ϑr z z =,),(),(21ϑϑr z z r z ≤≤,xy r σϑ∈),(,于是⎰⎰⎰Vdzrdrd z r r f ϑϑϑ),sin ,cos (⎰⎰⎰=σϑϑϑϑϑdz z r r f r z r z rdrd ),sin ,cos (),(),(12.在这里可以看到,采用柱面坐标按上述公式计算三重积分,实际上是对z 采用直角坐标进行积分,而对另外两个变量采用平面极坐标进行积分.例5 计算⎰⎰⎰VzdV ,其中是由4222=++z y x 及抛物面223y x z +=所围成(在抛物面内的那一部分)的立体区域(如图9-39).解法一 按直角坐标系中的计算,由两曲面交线的方程为:⎩⎨⎧+==++.3,422222y x z z y x 这曲线在oxy 平面上的投影曲线方程为⎩⎨⎧==+.6,322z y x 由此可知V 在oxy 平面的投影区域为圆域322≤+y x .下曲面:322y x z +=,上曲面:224y x z --=,有,43:2222y x z y x V --≤≤+3:),(22≤+∈y x xy y x σ,于是 图9-39⎰⎰⎰⎰⎰⎰≤++--=V y x zdzy x y x d zdV 322222234σ6)3(42132222222d y x y x y x ⎰⎰≤+⎥⎦⎤⎢⎣⎡+---=r d r r r d ⎥⎦⎤⎢⎣⎡--=⎰⎰9421030242θπdr r r r ⎪⎪⎭⎫ ⎝⎛--=⎰940353π ππ413035442642=⎥⎦⎤⎢⎣⎡--=r r r . 解法二 经柱面坐标变换,由上曲面方程为422=+z r ,即24r z -=.下曲面方程为23r z =,即32r z =. 2243:r z r V -≤≤,,30,20:),(≤≤≤≤∈r xy r πθσθ于是⎰⎰⎰⎰⎰⎰-=V zdz r r rdrd zdV σθ22314dr r r d ⎪⎪⎭⎫ ⎝⎛--=⎰⎰9421030242θπππ413940353=⎪⎪⎭⎫ ⎝⎛--=⎰dr r r r . 因此,利用柱面坐标变换时,首先求出V 在oxy 平面上的投影区域xy σ,确定上、下曲面,然后用柱面坐标变换,把上、下曲面表示成ϑ,r 的函数,投影区域用ϑ,r 不等式来表示.若被积函数中含有22x y +,V 在yoz 平面上的投影区域是圆域或部分时,可用柱面坐标变换.,sin ,cos x x r z r y ===ϑϑ若被积函数中含有22x z +,V 在xoz 平面上的投影区域是圆域或部分时,可用柱面坐标变换,ϑcos r z =,ϑsin r x =,.y y =。
柱面坐标变换

柱面坐标变换在数学和物理学中,柱面坐标系是一种常用的坐标系,通常用来描述圆柱体或圆锥体上的点。
柱面坐标系包括径向距离r、方位角$\\theta$和高度z三个坐标参数。
柱面坐标变换是从笛卡尔坐标系到柱面坐标系的转换过程,通过该变换可以描述更为复杂的空间几何关系。
坐标系介绍•径向距离r:表示点到z轴的投影长度,通常$r\\geq 0$。
•方位角 $\\theta$:表示点在x−y平面上的极角,通常$0\\leq \\theta < 2\\pi$。
•高度z:表示点在z轴上的坐标。
柱面坐标变换公式若一个点在柱面坐标系下的位置为$(r, \\theta, z)$,其对应的笛卡尔坐标为P(x,y,z),则柱面坐标系到笛卡尔坐标系的变换公式如下:$$ x = r\\cos(\\theta) $$$$ y = r\\sin(\\theta) $$z=z其中,x、y、z分别是点在笛卡尔坐标系下的坐标。
而逆变换(笛卡尔坐标系到柱面坐标系)的公式如下:$$ r = \\sqrt{x^2 + y^2} $$$$ \\theta = \\arctan\\left(\\frac{y}{x}\\right) $$示例考虑一个在柱面坐标系下的点$(4, \\frac{\\pi}{3}, 2)$,我们要将其转换到笛卡尔坐标系下。
根据上述变换公式,我们可以得到:$$ x = 4\\cos\\left(\\frac{\\pi}{3}\\right) = 2 $$$$ y = 4\\sin\\left(\\frac{\\pi}{3}\\right) = 2\\sqrt{3} $$z=2因此,该点在笛卡尔坐标系下的坐标为$(2, 2\\sqrt{3}, 2)$。
应用柱面坐标变换在数学和物理学的问题中具有重要的应用,特别是在三维空间中的曲线积分、曲面积分等计算中。
通过使用柱面坐标变换,可以简化许多复杂的计算过程,使得问题的求解更加直观和简便。
柱面坐标变换怎么确定z的范围

柱面坐标变换确定z的范围问题在三维空间中,柱面坐标系是一种常用的坐标系,它通过两个坐标值和一个高度值来确定空间中的点。
在柱面坐标系中,确定 z 的取值范围是一个重要问题,下面将介绍柱面坐标变换中如何确定 z 的范围。
一、柱面坐标系简介在柱面坐标系中,一个点的坐标由径向距离ρ、方位角φ 和高度 z 三个值确定。
其中,ρ 表示点到 z 轴的距离,φ 表示点在 xy 平面上的投影与 x 轴正半轴的夹角,z 表示点在 z 轴上的高度。
二、z 的范围确定在进行柱面坐标变换时,我们需要确定 z 的取值范围,以便正确描述空间中的点。
通常情况下,z 的范围取决于具体问题的设定,但一般遵循以下规则:1. 有界范围如果问题中给定了 z 的范围限制,比如z ∈ [a, b],那么 z 的取值范围就是有界的,在这种情况下,我们直接使用给定的范围即可。
2. 无界范围在某些情况下,z 的范围可能是无界的,这需要我们根据具体情况进行分析。
2.1 无上界如果问题中要求 z 为非负值,即z ≥ 0,那么 z 的取值范围为[0, +∞)。
2.2 无下界如果 z 的取值不受限制,那么 z 的范围是 (-∞, +∞)。
三、应用举例为了更好地理解柱面坐标变换中 z 的范围确定问题,可以通过一个简单的例子来加以说明。
假设某个问题要求描述半径为 2 的柱面内的一个点的位置,且z ≥ 0。
在这种情况下,我们可以确定 z 的范围为[0, +∞),因为问题限制了 z 为非负值。
四、总结通过以上讨论,我们了解到在柱面坐标变换中确定 z 的范围是非常重要的,这有助于我们正确地描述空间中的点位置。
对于有界范围的问题,直接采用给定的范围;对于无界范围的问题,根据具体要求确定 z 的范围范围。
掌握这一点,将有助于我们更好地应用柱面坐标系进行问题求解。
拉普拉斯算子的极坐标、柱坐标和球坐标表示

拉普拉斯算⼦的极坐标、柱坐标和球坐标表⽰\documentclass{article}\usepackage{amsmath}\usepackage{amsthm}\usepackage{amsfonts}\usepackage{ctex}\usepackage{mathrsfs}\begin{document}\section{极坐标变换下的Laplace算⼦}对于函数u=u(x,y),其中(x,y)∈D xy⊆R2∖{(0,0)},构造极坐标变换\begin{equation}x=r \cos \theta ,\end{equation}\begin{equation}y=r\sin\theta,\end{equation}其中(r,θ)∈D rθ⊆(0,+∞)×[0,2π),计算得雅可⽐⾏列式∂(x,y)∂(r,θ)=r>0,因此(1)式和(2)式表⽰⼀个双射T:(r,θ)↦(x,y),从⽽映射(函数)(r,θ)↦u存在。
为了⽅便,我们还假设u是⼆阶连续可微的,使得u对x,y的混合偏导数与求导顺序⽆关。
由(1)(2)易得r2=x2+y2,两边对变量x求导得r ∂r∂x=x,所以∂r∂x=xr,同理可得∂r∂y=yr。
由(1)(2)也易得x sinθ=y cosθ,两边对变量x求导得sinθ+x ∂θ∂x cosθ=−y∂θ∂x sinθ,即∂θ∂x=−sinθx cosθ+y sinθ,为了使得表达式简洁,我们在分⼦分母都乘以⾮零的r并将(1)(2)分别代⼊式中的x,y得∂θ∂x=−yr2,同理可得∂θ∂y=xr2.为了计算∇2u,⽤链式法则先求对变量x的⼀阶偏导数并代⼊上⾯的结论和化简得∂u ∂x=∂u∂r∂r∂x+∂u∂θ∂θ∂x=∂u∂rxr−∂u∂θyr2,∂u ∂y=∂u∂r∂r∂y+∂u∂θ∂θ∂y=∂u∂ryr+∂u∂θxr2,运⽤求导的乘积法则和链式法则得\begin{equation}\dfrac{\partial^2 u}{\partial x^2}=\dfrac{\partial}{\partial x}\left(\dfrac{\partial u}{\partial x}\right)=\left(\dfrac{\partial^2 u}{\partialr^2}\dfrac{\partial r}{\partial x}+\dfrac{\partial^2 u}{\partial r\partial \theta}\dfrac{\partial \theta}{\partial x}\right)\dfrac{\partial r}{\partial x}+\dfrac{\partial u}{\partial r}\dfrac{\partial^2 r}{\partial x^2}+\left(\dfrac{\partial^2 u}{\partial r\partial \theta}\dfrac{\partial r}{\partial x}+\dfrac{\partial^2 u}{\partial \theta^2}\dfrac{\partial \theta}{\partial x}\right)\dfrac{\partial \theta}{\partial x}+\dfrac{\partial u}{\partial \theta}\dfrac{\partial^2 \theta}{\partial x^2},\end{equation}将x换成y得\begin{equation}\dfrac{\partial^2 u}{\partial y^2}=\dfrac{\partial}{\partial y}\left(\dfrac{\partial u}{\partial y}\right)=\left(\dfrac{\partial^2 u}{\partialr^2}\dfrac{\partial r}{\partial y}+\dfrac{\partial^2 u}{\partial r\partial \theta}\dfrac{\partial \theta}{\partial y}\right)\dfrac{\partial r}{\partial y}+\dfrac{\partial u}{\partial r}\dfrac{\partial^2 r}{\partial y^2}+\left(\dfrac{\partial^2 u}{\partial r\partial \theta}\dfrac{\partial r}{\partial y}+\dfrac{\partial^2 u}{\partial \theta^2}\dfrac{\partial \theta}{\partial y}\right)\dfrac{\partial \theta}{\partial y}+\dfrac{\partial u}{\partial \theta}\dfrac{\partial^2 \theta}{\partial y^2}.\end{equation}注意由于假设⼆阶连续可微,所以两个混合偏导数⽤同⼀个记号表⽰。
柱坐标转换为球坐标

怎样设置坐标轴数值
在数据可视化中,设置坐标轴的数值是非常重要的,可以帮助我们更清晰地理解数据的含义和关系。
正确地设置坐标轴数值可以让图表更具信息量和可读性。
1. 确定数据范围
在设置坐标轴数值之前,首先要了解数据的范围。
通过查看数据的最大值和最小值,可以确定坐标轴应该包含的数值范围。
确保数据的所有点都能在坐标轴上完全显示。
2. 决定坐标轴间隔
确定数值范围后,下一步是决定坐标轴的刻度间隔。
间隔的选择取决于数据的分布,一般会选择合适的间隔使数据更易于理解。
3. 设置坐标轴标题
在图表中添加坐标轴标题可以帮助读者更好地理解图表,标明坐标轴的含义。
标题应该清晰、简洁,并与图表内容相匹配。
4. 刻度标签的显示
在设置坐标轴数值时,注意刻度标签的显示。
确保刻度标签清晰可见,不要重叠,最好采用适当的角度显示,以免混淆。
5. 增加辅助线
在某些情况下,可以添加辅助线来辅助理解数据。
辅助线可以突出某些关键数值或者有趋势分布的特点,帮助读者更好地分析数据。
6. 调整坐标轴位置
有时候可能需要调整坐标轴的位置,使得数据更好地展示或者突出某些特点。
尝试不同的位置搭配,找到最适合的显示效果。
结论
通过适当地设置坐标轴数值,我们可以使图表更具有信息量和可读性,帮助读者更清晰地理解数据的含义和关系。
合理设置坐标轴数值是数据可视化中至关重要的一步,值得我们认真对待和努力提升。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
柱面坐标变换
容易得出,点M 的直角坐标),,(z y x 与柱坐标
),,(z r θ之间的关系为:
θc o s r x =,
θsin r y =, z z =.
下述三族曲面,称为柱面坐系中的坐标曲面:
(¡)一族以oz 轴为对称轴的圆柱面:i r r
=(常数),即222i r y x
=+; (¡¡)一族通过oz 轴的半平面:i θθ=(常数),
即i x y θtan =;
(¡¡¡)一族通过oz 轴的半平面=z i z (常数),
若用这三族坐标曲面把空间区域V 分成若干个小区
域,这样所得到的小区域中,有规则的小区域(如图
9-38)的体积为z S V ∆⋅≈∆扇形,由平面极坐标变换
知,r r S ∆∆≈θ扇形,有 z r r V ∆∆∆≈∆θ,
而),sin ,cos (),,(z r r f z y x f θθ=,于是 ⎰⎰⎰∆∑=→V v z y x f dv z y x f ),,(lim ),,(0
λ ⎝
⎛+∆∆∆=∑∑→规则区域不规则区域z y x f z r r z r r f ,,(),sin ,cos (lim 0θθθλ
且∑=∆→不规则区域0),,(lim 0v z y x f λ,因此
⎰⎰⎰⎰⎰⎰=v
v dz rdrd z r r f dv z y x f θθθ),sin ,cos (),,(.
这就是三重积分从直角坐标变换为柱面坐标的换元公式. 柱面坐标系中的体积元素为dz rdrd ϑ. 为了把上式右端化成累次积分,设平行于oz 轴的直线与区域V 的边界最多只有两个交点,设V 在oxy 平面上的投影区域为xy σ,把区域xy σ用ϑ,r 表示,区域V 关于oxy 平面的投影柱面将V 的边界曲面分为上、下两面部分,其方程表示为z 是ϑ,r 的函数,即 上曲面:
),(2ϑr z z =, 下曲面:),(1ϑr z z =,
),(),(21ϑϑr z z r z ≤≤,xy r σϑ∈),(,
于是
⎰⎰⎰V
dz
rdrd z r r f ϑϑϑ),sin ,cos (⎰⎰⎰=σϑϑϑϑϑdz z r r f r z r z rdrd ),sin ,cos (),(),(12.
在这里可以看到,采用柱面坐标按上述公式计算三重积分,实际上是对z 采用直角坐标进行积分,而对另外两个变量采用平面极坐标进行积分.
例5 计算⎰⎰⎰V
zdV ,其中是由
4222=++z y x 及抛物面2
23y x z +=所围成(在抛物面内的那一部分)的立体区域(如图9-39).
解法一 按直角坐标系中的
计算,由两曲面交线的方程为:
⎩⎨⎧+==++.
3,422222y x z z y x 这曲线在oxy 平面上的投影曲线
方程为⎩⎨⎧==+.
6,322z y x 由此可知V 在oxy 平面的投影区
域为圆域322≤+y x .
下曲面:3
22y x z +=,上曲面:224y x z --=,有
,43
:222
2y x z y x V --≤≤+3:),(22≤+∈y x xy y x σ,
于是 图9-39
⎰⎰⎰⎰⎰⎰≤++--=V y x zdz
y x y x d zdV 3222
22234σ6)3(42132222222d y x y x y x ⎰⎰≤+⎥⎦⎤⎢⎣
⎡+---=
r d r r r d ⎥⎦⎤⎢⎣
⎡--=⎰⎰9421030242θπdr r r r ⎪⎪⎭
⎫ ⎝⎛--=⎰940353π ππ413035442642=⎥⎦⎤⎢⎣
⎡--=r r r . 解法二 经柱面坐标变换,由上曲面方程为
422=+z r ,即24r z -=.
下曲面方程为2
3r z =,即3
2
r z =. 2243:r z r V -≤≤,,30,20:),(≤≤≤≤∈r xy r πθσθ
于是
⎰⎰⎰⎰⎰⎰-=V zdz r r rdrd zdV σθ22
3
14dr r r d ⎪⎪⎭⎫ ⎝
⎛--=⎰⎰9421030242θπππ413940353=⎪⎪⎭
⎫ ⎝⎛--=⎰dr r r r . 因此,利用柱面坐标变换时,首先求出V 在oxy 平面上的投影区域xy σ,确定上、下曲面,然后用柱面坐标变换,把上、下曲面表示成ϑ,r 的函数,投影区域用ϑ,r 不等式来表示.
若被积函数中含有22x y +,V 在yoz 平面上的投影区域是圆域或部分时,可用柱面坐标变换
.,sin ,cos x x r z r y ===ϑϑ
若被积函数中含有2
2x z +,
V 在xoz 平面上的投影区域是圆域或部分时,可用柱面坐标变换,ϑcos r z =,ϑsin r x =,.y y =。