履带车辆三种转向方式特性的对比分析
工程机械车辆的转向形式及其特点
L
V2
V′
α
V1
ωz
β
O2
OT
O1
O
B R
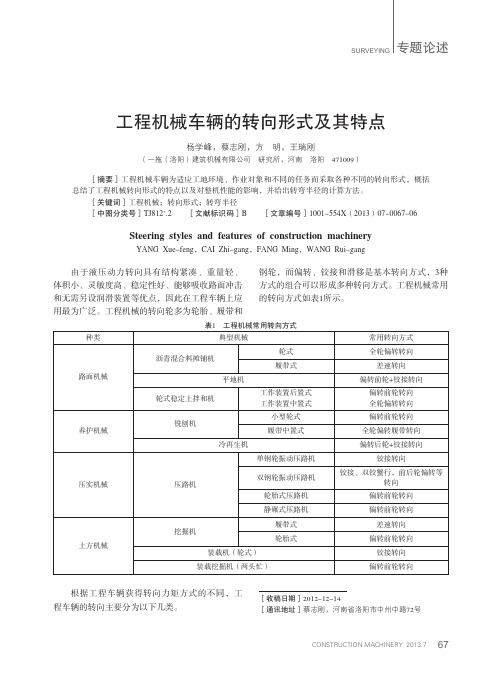
图1 前轮偏转
车辆的转弯半径
或
R=LctgD R=LctgE
K
2 K
2
½ °°¾ ° °¿
式中 L——车轴的轴距;
K——左右转向节立轴距;
α——内导向轮偏转角;
β——外导向轮偏转角。
(2)后轮偏转。有的车辆前方装有工作装
置,若采用前轮偏转方式,车轮的偏转角将受工作
(3)前后轮偏转。这种转向形式的特点是转 弯半径小、具有偏移蟹行功能,但其动力系统、转 向控制系统的结构都较前两种方式复杂,往往用于 对机动性、作业施工有特殊要求或机架特别长的机 械(如大型轮胎式起重机、双钢轮压路机)。当前 后轮同时反向偏转时,转弯半径小、机动性好,如 图3所示。车辆的转弯半径(K1=K1时)
滑移 转向 最小
对准工作面
一般
方便
一般
方便
方便
驾驶路线判断
方便
较差
方便
方便
方便
转向时轮胎磨损
一般
一般
较小
小
最大
结构复杂程度
复杂
复杂
最复杂
简单
简单
转向系与传动系的关系
不相关
不相关
不相关
不相关
相关
整机纵向稳定性
良好
良好
良好
较差
差
整机横向稳定性
一般
一般
一般
略差
一般
72 建筑机械 2013.7(上半月刊)
图3 前后轮偏转 υ
图4 蟹行转向
(5)多桥偏转车轮转向。多转向桥的偏转车 轮转向原理与单转向桥相同,即尽量使各轮轴线在 地面的投影交于一点(如图5为双桥转向)。对于 在公路行驶而总重和长度大的轮式工程机械,为了 不影响弯道行驶能力,可采用多轮偏转的多桥支承 底盘,大型汽车起重机多采用这种方式。由图5可 知各转向轮转弯半径为
履带车转弯原理
履带车转弯原理
嘿,朋友们!今天咱就来聊聊履带车转弯原理,这可超级有趣呢!
你想想,履带车就像是一个力大无穷的大家伙,在各种地形上横冲直撞。
比如说,那建筑工地上的履带挖掘机,那可是个厉害角色!
那履带车到底是怎么转弯的呀?其实呢,就像是人走路转弯差不多啦,但又不太一样。
它呀,通过控制两边履带的速度差异来实现转弯。
好比说左边履带走得慢一点,右边履带快一点,欸,这不就转弯了嘛。
就像咱走路的时候,一只脚迈得慢点,一只脚快点,不就转过去了嘛!
再打个比方,想象一下一辆履带车就像是一只大怪兽,它的两条履带就是它的两只大脚。
当它要转弯时,就像是大怪兽想拐个弯去追其他小动物,它通过调整两只大脚的速度来完成这个动作。
有趣吧!
履带车转弯可神奇了呢!在战场上,那些威风凛凛的坦克,它们靠着这个原理灵活地改变方向,是不是超级厉害?要是没有这个原理,它们可就没办法那么潇洒地在战场上冲锋啦!在农田里,那些耕地的履带车也是利用这个原理,乖乖地按照农夫的指示转弯干活。
所以啊,履带车转弯原理可太重要啦!它让这些大块头们变得灵活又能干。
哇塞,真的是让人大开眼界呀!我觉得这真是太神奇了,让我们对这些厉害的大家伙又多了一份敬佩和惊叹!
总之,履带车转弯原理就是这么酷,这么有意思!你是不是也跟我一样觉得很神奇呢?。
履带差速转向原理
履带差速转向原理
嘿,朋友们!今天咱来聊聊履带差速转向原理,这可真是个超级有趣的玩意儿!
想象一下,你正在驾驶一辆坦克,那威风凛凛的样子。
坦克为啥能那么灵活地转向呢?这就全靠履带差速转向原理啦!就好比人走路,两条腿的速度不一样,就能改变方向,坦克的履带也是这个道理。
比如说,当左边的履带转得慢一点,右边的履带转得快一点,那坦克不就往左边拐了嘛,反之亦然。
这多神奇呀!
我给你讲啊,这就像是两个人一起拉一辆车,一个人使劲大,一个人使劲小,那车不就往使劲小的那个人那边偏嘛!履带差速转向原理就是这么简单又实用。
你知道吗,这个原理在很多机械上都有应用呢!像那些大型的工程机械,它们在复杂的工地上也能灵活自如地行动,靠的就是这个原理。
咱再想想,要是没有这个原理,那些大家伙们得多笨拙呀!根本没办法应对各种情况。
所以说呀,履带差速转向原理真的是太重要啦!它让机械们变得聪明又灵活,就像给它们装上了智慧的翅膀。
我觉得这简直就是机械世界里的一个伟大发明!以后我们还会看到更多利用这个原理创造出来的神奇机械,那场面肯定超震撼!你难道不想看看吗?哇,真的好期待呀!。
简述履带式机械转向原理

履带式机械转向原理简述履带式机械,如履带式挖掘机、坦克等,以其独特的行走方式在各种复杂地形中表现出卓越的适应性和稳定性。
其转向原理涉及多个关键部分,下面将分别进行简述。
1. 履带驱动履带式机械的主要行走机构是履带,它与轮子不同,能够使机器在各种地形上稳定行走。
履带驱动依靠主动轮的旋转带动履带运动,从而实现机械的前进、后退和转向。
2. 转向机构转向机构是履带式机械的重要组成部分,它决定了机械的行驶方向。
常见的转向机构有中心转向和差速转向两种类型。
中心转向机构通过改变两侧履带的行驶方向,使机械按照预定路线转向。
差速转向则是通过调节两侧履带的转速,使机械朝向一侧移动,实现转向。
3. 差速调整差速调整是通过控制两侧履带的转速差来实现转向的。
在差速转向中,转速较快的履带会推动机械向该侧移动,而转速较慢的履带则相对滞后,从而形成转向动作。
这种转向方式需要精确的控制系统来调节两侧履带的转速,以实现平滑、准确的转向。
4. 履带张紧履带在使用过程中会受到磨损和拉伸,导致长度变短。
为了保持履带的良好性能,需要定期检查并调整履带的张紧度。
张紧系统通过调节履带两端的张紧轮位置,使履带保持适当的张力,确保机械行驶平稳、减少磨损。
5. 制动系统制动系统用于在需要时迅速降低履带式机械的行驶速度或使其停止。
制动系统通常由多个制动器组成,分布在履带的不同位置。
当制动器被激活时,它们会与履带产生摩擦力,从而降低履带的转速或使其停止转动。
良好的制动系统能提高机械的安全性和操控性。
总之,履带式机械的转向原理涉及多个关键部分,这些部分协同工作,实现了机器在不同地形中的稳定行驶和精确转向。
通过维护和保养这些系统,可以确保履带式机械的正常运行和延长其使用寿命。
履带车辆转向性能参数分析与试验研究_芮强

ur1 分别为高速侧和低速侧履带几何中心履带着地
区段卷绕速度; vr 2 、 vr1 分别为高速侧和低速侧履 带几何中心履带接地段的牵连运动速度; B 为两侧 履带中心距;d1、d2 分别为基于 GPS 测试原理的转
由图1所示履带车辆的实际转向半径和实际相对转向半径表示为?????113转向半径修正系数转向半径修正系数k表示实际转向半径与理2g2122g212ssrrddrdbd????5论转向半径的比值此时转向半径修正系数rkr22转向角速度及转向角速度修正系数2g2121212bussrrllrruuurd??6履带车辆转向角速度是评价履带车辆转向灵活性的重要技术指标
(1. Department of Mechanical Engineering, Academy of Armored Force Engineering, Beijing 100072; 2. China North Special Vehicle Research Institute, Beijing 100072; 3. Science and Technology on Vehicle Transmission Laboratory, China North Vehicle Research Institute, Beijing 100072)
第 51 卷第 12 期 2015 年 6 月
机
械
工
程
学 报
Vol.51 Jun.
No.12 2015
JOURNAL OF MECHANICAL ENGINEERING
DOI:10.3901/JME.2015.12.127
履带车辆转向性能参数分析与试验研究
芮 强1 王红岩 1 王钦龙 1 万 丽2 盖江涛 3 周广明 3
履带车辆的转向理论

一、双履带车辆的转向理论对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。
(一)双履带式车辆转向运动学履带车辆不带负荷,在水平地段上绕转向轴线O作稳定转向的简图,如图7-12所示。
从转向轴线O到车辆纵向对称平面的距离R,称为履带式车辆的转向半径。
以代表轴线O在车辆纵向对称平面上的投影,的运动速度代表车辆转向时的平均速度。
则车辆的转向角速度为:图7-12 履带式车辆转向运动简图(7-37)转向时,机体上任一点都绕转向轴线O作回转,其速度为该点到轴线O的距离和角速度的乘积。
所以慢、快速侧履带的速度和分别为:(7-38)式中:B—履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动。
由上可得:(二)双履带式车辆转向动力学1、牵引平衡和力矩平衡图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R作低速稳定转向时的受力情况(离心力可略去不计)。
转向行驶时的牵引平衡可作两点假设:(1)在相同地面条件下,转向行驶阻力等于直线行驶阻力,且两侧履带行驶阻力相等,即:(2)在相同的地面条件和负荷情况下,相当于直线行驶的有效牵引力,即:图7-13 转向时作用在履带车辆上的外力所以回转行驶的牵引平衡关系为:(7-39)设履带车辆回转行驶时,地面对车辆作用的阻力矩为,在负荷作用下总的转向阻力矩为:(7-40)式中:—牵引点到轴线的水平距离。
如前所述履带车辆转向是靠内、外侧履带产生的驱动力不等来实现的,所以回转行驶时的转向力矩为:(7-41)稳定转向时的力矩平衡关系为:(7-42)为了进一步研究回转行驶特性,有必要对内、外侧驱动力分别加以讨论。
由上可得:(7-43)式中:为在作用下,土壤对履带行驶所增加的反力,亦即转向力,作用方向与驱动力方向相同,以表示。
变形得式:(7-44)令所以。
第三部分上 工程机械转向理论

工程机械底盘理论第三部分上工程机械转向理论第一节概述第二节轮式车辆的转向理论第三节履带车辆的转向理论第一节概述根据工程车辆获得转向力矩方式的不同,工程车辆的转向可分为下面三类:一、偏转车轮转向及偏转履带转向(1)前轮偏转:即改变车辆前轮与机体的相对位置,前外轮的变道行驶半径最大。
驾驶员易于用前外轮是否避过来估计整机的行驶路线。
(2)后轮偏转:车辆前方装有工作装置,若采用前轮偏转方式,不仅车轮的偏转角将受工作装置的限制,并由于工作装置靠近前轮,其工作轮压较大,可能要求采用双胎或增大轮胎直径使轮距及外形尺寸加大,机动性降低,还将使转向阻力矩增加,采用后轮偏转方式,可以解决上述矛盾。
(3)前后轮同时偏转的转向方式,往往用于对机动性有特殊要求或机架特别长的机械。
(4)多桥偏转车轮转向方式,对于在公路行驶而总重和长度特别大的轮式工程机械,为了不影响弯道行驶能力,可采用多轮偏转的多桥支承底盘。
大型汽车式起重机多采用这种方式。
(5)偏转履带的转向方式:由于大型工程机械的生产率极高,而这样大型工程机械的重量很重,轻者上千吨,重者达万吨以上。
要担负起它们的承重,移动与转向行走,且要保持对地比压不超随着机器重量的增加,履带数目、每条履带的宽度和长度也随之增加,目前单条履带的宽度已达4.5m以上,接地长度超过15m。
多履带行走装置因履带组合方式不同,其特征、适用对象、承载能力均不同,见表9-1(P158-159)。
过150kPa,必须采用多履带行走装置。
斗轮机排土机多履带行走装置分三支点和四支点两种,每个支点下是一组履带,各组履带可由1、2或4条履带组成。
当多履带行走装置静止时,转向机构无法克服转向履带组与地面间巨大的摩擦力矩。
只有当多履带装置处于行驶状态时,转向履带才能被转动。
总的来说,多履带行走装置有以下特点:①履带支撑面积大,对地比压不大,一般为100~160kPa;②一般在稍经平整(坡度为10%)的地面上工作,转向半径大,且只要求缓慢转向;③行走速度低,一般为4~12m/min;④承载能力大。
履带车辆差速转向机构转向过程动态特性的试验方法

0
引
言
履带车辆差速转向的特点是:随着转向半径由大到 小变化,内侧履带的转矩方向将会发生变化,由输出功 率状态变为吸收功率状态,而外侧履带的转矩值将会进 一步增大,其输出功率将为发动机功率与内侧履带吸收 功率之和[1-5]。考虑到履带车辆转向过程中内、外侧履带 的工作特点,若要在试验台架上对差速式转向机构进行 转向过程动态特性的模拟是非常困难的,为此,目前通 常采用实车试验的方法对差速转向机构进行转向特性试 验[6-8],例如:文献[6]在履带车辆模型样车上进行转向试 验,文献[7]在实车上进行了转向力矩与转速的测量,文 献[8]也采用实车试验方式研究打滑条件下的履带车辆转 向特性。实车试验虽然完全反映实际情况,但其增加了 试验成本,试验周期长,调整不方便,因此,寻找更为 实用方便的台架试验方法已成必然[6-11]。本文基于液压恒 压网络中二次元件具有惯量小、响应快以及可以实现四 象限工作等特点,提出了用二次元件模拟发动机转速特 性以及转向机构两侧载荷特性的方法,探索转向机构台 架试验的实现途径。
F2 P2
P 1
1
F1
O C1
C2
2
图 5 0≤ρ <0.5 时两侧履带的功率流动情况 Fig.5 Power flow situation of bilateral track when 0≤ρ <0.5
2
C C1
差速式转向机构工作原理
1
O
图 2 2 fB / L 时两侧履带的功率流动情况 Fig.2 Power flow situation of bilateral track when 2 fB / L
3 fG Rsp GL Mo Rsp Rsp air CD A(o i ) 2 2 4 B 16
履带车辆高速转向漂移分析
(1)
车辆的转向角速度为 ω:
ω= v2 R+ B 2
(2)
车辆重心的转向半径(O 点到 C 点的距离)为 RC:
RC=
R cos
α
(3)
车辆离心力横向分力 PLx 和纵向分离 PLy 分别为:
2
PLx= PLcos α=(24RG+RB)v22g
(4)
2
PLy= PLsin
α=
4GRv2 tan α (2R+B)2g
在车辆重心 C 处,离心力 PL 可分解为横向分力 PLx 和纵
向分力 PLy,由于离心力横向分力的作用,两侧履带的转向
极(转向瞬间履带接地段转向中心位置)发生偏移,相应
车辆的转向中心也发生偏移,由 OC 偏移至 O 点,车辆受
到的离心力为:
2
PL= mω2RC=(2R+4BG)R2g·v2cos α
-
2GRv2 tan α (2R+B)2g
+(42fRG+RBv)22hgCB
(15)
上述式中:v2 为高速履带速度;g 为重力加速度;B 为履带 中心距;L 为履带着地长;μ 为履带车辆以某一半径转向
时的转向阻力系数;f 为履带车辆地面运动阻力系数;λ
为转向极偏移量;hC 为车辆重心高;m 为车辆质量;G 为 车辆所受重力;α 为滑转角度。
(10) (11)
(12) (13)
2 0 19·9
39
设计·计算
Design and Calculation
2
2
Px2=
μG ( L2 BL 4
-λ2)+ fG 2
+
2GRv2 tan α (2R+B)2g
基于履带车辆稳态转向性能分析与试验

基于履带车辆稳态转向性能分析与试验本文从网络收集而来,上传到平台为了帮到更多的人,如果您需要使用本文档,请点击下载按钮下载本文档(有偿下载),另外祝您生活愉快,工作顺利,万事如意!1 转向模型基本假设及坐标系基本假设条件1)地面为硬路或铺装路,不计履带的沉陷以及履带板在侧向方向的推土效应。
2)水平路面均匀稳态转向,两侧履带接地压力为均匀分布。
3)不计履带宽度及张力变化对履带接地压力的影响,并假设履带为不可拉伸的均匀柔性带。
4)履带车辆转向时的行驶阻力系数与直线行驶时相同。
5)转向时履带上任意一点的剪切应力与该点的剪切位移量相关,其表达式为τ=τmax(1-e-j/K),其中τmax为履带与地面之间的最大剪切应力;j 为地面土壤的剪切位移量;K 为土壤抗剪模量,且剪切应力方向与该点的滑动速度方向相反。
坐标系描述为研究履带车辆的转向特性,假定履带车辆在转向过程中作 3 自由度平面运动,如图 1 所示为履带车辆转向运动学简图。
在水平地面上建立惯性坐标系XOY,并以履带车辆转向中心线与车体纵向中心线的交点o 为坐标原点建立固结于车体上的连体坐标系xoy。
2 履带车辆转向模型的试验验证以某型履带式装甲车辆为对象,基于建立的履带车辆转向动力学模型,仿真分析履带车辆的稳态转向性能,并根据试验结果对转向动力学模型进行验证。
高速侧履带滑转率σ2及低速侧履带滑移率σ1的模型计算结果与试验结果分别随车辆实际转向半径R 的变化关系曲线。
从图中结果对比可见,两侧履带滑转率和滑移率的计算结果与试验结果从总体变化趋势上具有良好的一致性。
无论是从测试结果还是从两个转向模型的计算结果都可以看出,滑转率和滑移率均具有随履带车辆转向半径的增大逐渐减小的变化趋势。
为了进一步验证转向模型的准确性,给出了履带车辆在砂土路面上转向时,在两个不同的转向半径下,车辆的转向性能参数的仿真计算与试验测试对比结果。
3 结论对比研究了基于剪切应力-剪位移关系转向模型计算结果与基于库仑摩擦力转向模型计算结果的差异。
履带拖拉机转向原理
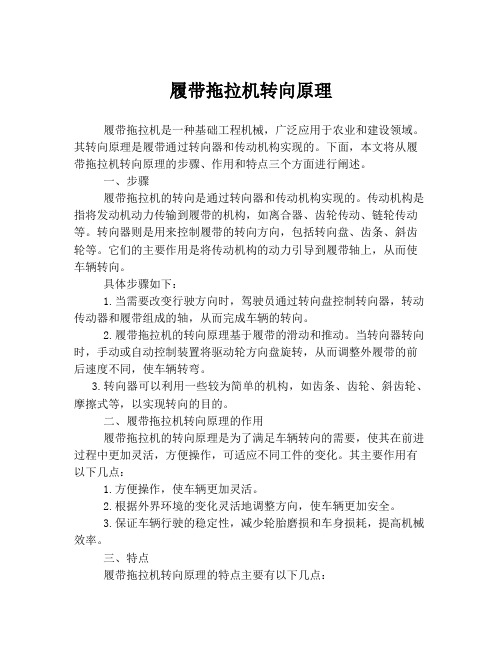
履带拖拉机转向原理履带拖拉机是一种基础工程机械,广泛应用于农业和建设领域。
其转向原理是履带通过转向器和传动机构实现的。
下面,本文将从履带拖拉机转向原理的步骤、作用和特点三个方面进行阐述。
一、步骤履带拖拉机的转向是通过转向器和传动机构实现的。
传动机构是指将发动机动力传输到履带的机构,如离合器、齿轮传动、链轮传动等。
转向器则是用来控制履带的转向方向,包括转向盘、齿条、斜齿轮等。
它们的主要作用是将传动机构的动力引导到履带轴上,从而使车辆转向。
具体步骤如下:1.当需要改变行驶方向时,驾驶员通过转向盘控制转向器,转动传动器和履带组成的轴,从而完成车辆的转向。
2.履带拖拉机的转向原理基于履带的滑动和推动。
当转向器转向时,手动或自动控制装置将驱动轮方向盘旋转,从而调整外履带的前后速度不同,使车辆转弯。
3.转向器可以利用一些较为简单的机构,如齿条、齿轮、斜齿轮、摩擦式等,以实现转向的目的。
二、履带拖拉机转向原理的作用履带拖拉机的转向原理是为了满足车辆转向的需要,使其在前进过程中更加灵活,方便操作,可适应不同工件的变化。
其主要作用有以下几点:1.方便操作,使车辆更加灵活。
2.根据外界环境的变化灵活地调整方向,使车辆更加安全。
3.保证车辆行驶的稳定性,减少轮胎磨损和车身损耗,提高机械效率。
三、特点履带拖拉机转向原理的特点主要有以下几点:1.采用履带推动、滑动式的转向方式,稳定性好,适用于各种道路和地形,使车辆更加具有通行能力。
2.转向系统采用了传动器和转向器的组合,使控制转向更加容易,驾驶人员可以通过转向盘轻松完成转向。
3.转向系统结构简单,维护保养方便,具有较高的可靠性和持久性,能够保证车辆长期稳定运行。
总之,履带拖拉机的转向原理是一项重要的技术,在日常生产和运输中有着广泛的应用场景。
我们需要认真理解和掌握它的工作原理和应用特点,使其能够更好地服务于我们的生产和日常生活。
履带转向原理
履带转向原理履带转向原理:提升机械车辆操控性能的重要技术引言:在现代工程机械领域,履带转向原理是一项关键技术,它通过改变履带的运动方式,提升了机械车辆的操控性能。
本文将围绕履带转向原理展开详细阐述,并探讨其在不同领域的应用。
一、履带转向原理的基本概念和原理履带转向原理是指通过改变履带的运动方式来实现车辆的转向动作。
传统的履带车辆是通过左右履带的差速运动来完成转向,但这种方式存在转向半径大、车辆稳定性差等问题。
为了解决这些问题,履带转向原理应运而生。
履带转向原理主要包括两种方式:履带转向和转向系统辅助。
履带转向是指通过改变履带的运动方向和速度来实现车辆的转向动作,可以大大减小转向半径。
转向系统辅助则是通过操纵转向系统,如转向盘或操纵杆,来控制履带的转向方向和角度。
这种方式提供了更加灵活精确的操控手感。
二、履带转向原理的应用领域1.农业机械领域:在农业机械中,履带转向原理的应用可以提高农机的转场能力和作业效率。
例如,在大型联合收割机中,通过履带转向原理,可以实现车辆的快速转向和灵活机动,适应不同地形的作业需求。
2.工程机械领域:在工程机械领域,履带转向原理的应用可以提高机械车辆的操控性和工作效率。
例如,在挖掘机中,通过履带转向原理,可以实现挖掘机的快速转向和精确操作,提高施工的效率和质量。
3.防务领域:在军事领域,履带转向原理的应用可以提高军用车辆的机动性和作战能力。
例如,在坦克中,通过履带转向原理,可以实现坦克的快速转向和侧翻避雨等动作,提高作战的灵活性和战斗力。
三、履带转向原理的优势和挑战履带转向原理相比传统的履带车辆具有以下优势:1.转向半径更小:履带转向原理可以通过改变履带的运动方式,使车辆转向半径更小,提高机械车辆的操控性。
2.车辆稳定性更高:履带转向原理可以通过改变履带的运动方向和速度,使车辆的转向更加平稳,提高车辆的稳定性和平衡性。
然而,履带转向原理也面临着一些挑战:1.技术复杂性:履带转向原理涉及到多个机械和电气系统的协同工作,技术难度较大,需要对车辆的整体设计和控制系统进行全面考虑。
履带车辆三种转向方式特性的对比分析

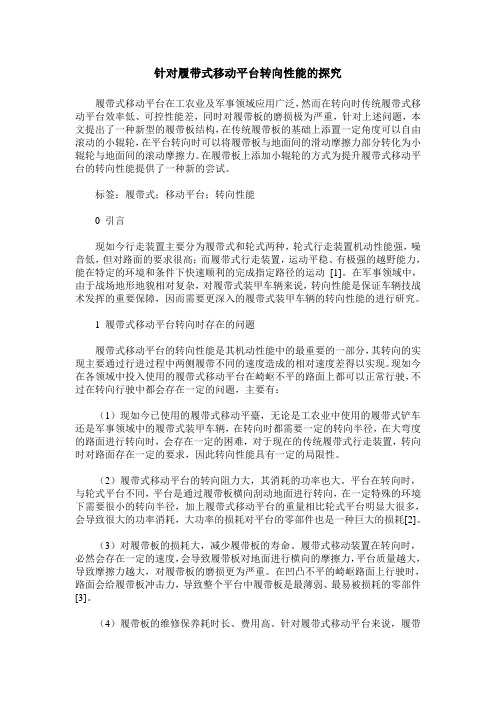
当车辆转向时 , 车体除 了做平移运动 , 还做旋 转运动 , 车体存在一个角速度 f i t ) 。此时 , 两侧履带的速度不同 , 外 侧 履 带 的速 度 “ 高 于 内侧 履 带 u , 有 如下 关 系 : 。且
带 车 辆在 农 业机 械 、 山机 械甚 至军 车领 域 的 广 泛 应 矿
依据。 图 1ຫໍສະໝຸດ 转 向 速 度 图 L 在转向过程中 , 两侧履带 速度 u 和 , 向角速 。 转
度 ∞与 R之 间 的关 系 为
一
1 3种 转 向方 式 运 动 学 分 析
在车辆直驶 时 , 车体 只做平 移运 动 , 车上各 点牵
连速 度相 同 , 侧履 带 的 速 度 相 同 , 等 于平 均 车 速 。 两 都
。 = 一
( l 1 , )
转 向时 , 点 的速 度 如 图 l所 示 。其 中 : 为 当前 各 时刻 车辆 中心 的速 度 ; 和 u 为两 侧 履 带 速 度 ;。为 u 转 向前 的直 驶 车速 ; B为 履带 中心距 ; 为转 向半 径 。
u
y
有 3种 典 型 的方 式 : 是 中心 差 速 式 , 外 侧 履 带 速 一 即 度升高 , 内侧 履 带 速 度 相 应 地 降低 , 辆 平 均 速 度 不 车
收稿 日期 :2 0 0 9—0 6— 1 l 作者 简介 :陈泽宇 ( 9 2一) 男 , 18 , 山东青岛 人, 博士研 究生 , E—m i ( al )
c e z 0 8@ sn . o 。 h n y 21 ia c r n
冬 南 态
当 Y= 0时 , 向方式对应着 中心差速式 ; Y= 转 当 05 .B时, 对应 内侧 降速式 ; Y= 一 . B时 , 当 05 对应外 侧升速式。
履带式车辆的驾驶

履带式车辆的驾驶一、履带式车辆的转向和制动履带车辆的转向方式与轮式车辆不同,履带车辆行走机构相对于机体不能偏转,它是靠改变两侧驱动轮上的驱动扭矩,使两边履带具有不同的驱动力而造成转向力矩,从而实现转向。
改变传到两侧驱动轮上的驱动扭矩的机构是转向机构。
履带拖拉机的转向系是由转向机构和转向操纵机构两部分组成的。
转向机构安装在履带拖拉机的后桥中,它把由中央传动传来的动力传递给两侧的最终传动,因此,它是从发动机到驱动轮之间的动力传递线路中的一个环节。
转向机构应能使拖拉机既可转大弯也可转小弯。
例如,拖拉机向一侧转向时,减小这一侧驱动轮的驱动扭矩可以转大弯(转弯半径大),切断驱动扭矩可以转较小的弯,切断动力以后再制动驱动轮可以转更小的弯甚至原地转弯。
因此,转向机构包括两个阶段的作用:第一阶段逐渐减小以至切断一侧驱动轮的驱动扭矩,使该侧履带所产生的驱动力逐渐减小以至等于零。
第二阶段逐渐对驱动轮施加制动以至完全刹住,使这侧履带不仅没有驱动力而且产生与拖拉机行驶方向相反的制动力。
只有这样,才能使履带拖拉机以各种不同的转弯半径进行转向。
由此可见,履带式车辆的制动器除了用作整个车辆的刹车和斜坡停车外,主要用来协助转向,因此也可把它看作是转向机构的一个组成部分。
在有些转向机构中,减小以至切断一侧驱动轮的驱动扭矩就是靠制动器来实现,因此在这些结构中,制动器就是转向机构中的不可分割的一个组成部分。
履带式车辆的转向机构主要有离合器、制动器转向机构,行星转向机构,差速式转向机构。
其转向操纵大部分是通过操纵转向离合器和制动器达至改变两侧驱动轮的驱动,使两侧履带具有不同的驱动力,而造成转向力矩,从而实现转向。
对于多机驱动的履带式工程机械,左右履带由可逆转的液压马达或电动机分别驱动。
在这种情况下,可采用相反的方向驱动左右履带,达到转向的目的。
马力较大的红旗-100拖拉机,为了减轻驾驶员的劳动强度,装有分离转向离合器的液压式转向加力器,使杠杆上的操纵力由35 kg 减小到5 kg 。
履带式行走机构的特点
履带式行走机构的特点履带式行走机构是一种常见的行走机构,具有以下特点:1. 稳定性:履带式行走机构采用履带作为行走方式,相比其他行走机构,具有更好的稳定性。
履带能够有效分散载荷,使机构在不平坦的地形上行走更加平稳,能够适应各种复杂的工况。
2. 承载能力强:由于履带分布较宽,能够提供较大的接触面积,使得履带式行走机构的承载能力更强。
它能够承受较大的重量,适用于需要携带大型设备或进行重型工作的场景。
3. 适应性强:履带式行走机构能够适应各种地形和环境条件,如泥地、沙漠、雪地等。
它的履带能够提供较大的摩擦力,使得机构能够在各种复杂的地形中行走,具有较强的越障能力。
4. 操控灵活:履带式行走机构的操控相对较为灵活,能够实现前进、后退、转弯等多种行走方式。
通过控制履带的转速和方向,可以实现机构的精确操控,适应不同的工作需求。
5. 抗冲击能力强:由于履带式行走机构采用履带作为行走方式,能够有效减缓冲击力的传递,减少机构和地面的振动,提高机构的稳定性和舒适性。
6. 能耗较高:履带式行走机构相比于其他行走机构,由于需要驱动较多的履带部件,因此能耗较高。
这是由于履带的接触面积较大,需要更多的动力来提供行走能力。
7. 维护成本高:履带式行走机构由于结构较为复杂,包含大量的履带链条和驱动轮等部件,因此维护成本相对较高。
需要定期检查和更换磨损严重的零部件,以确保机构的正常运行。
履带式行走机构在工程机械、军事装备等领域有广泛的应用。
它通过履带的稳定性、承载能力和适应性,能够在各种复杂的地形和环境条件下工作,具有较强的越障能力和操控灵活性。
然而,由于能耗较高和维护成本较高等缺点,履带式行走机构在一些特定场景下可能不太适用。
因此,在选择行走机构时,需要根据具体的应用需求和环境条件来进行选择。
履带车辆的转向理论
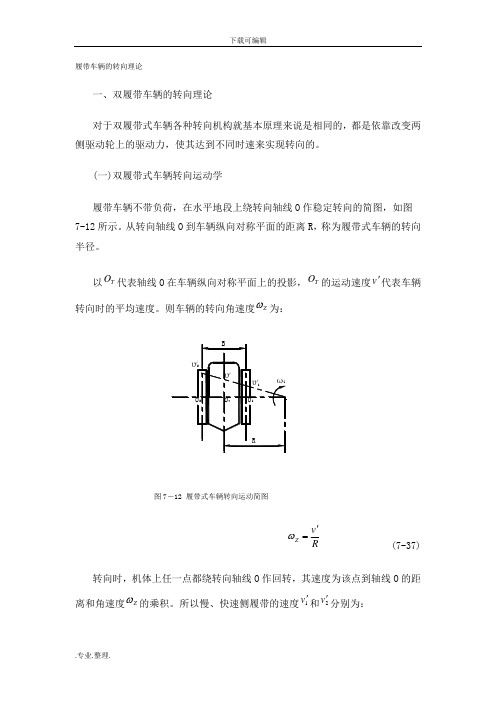
履带车辆的转向理论一、双履带车辆的转向理论对于双履带式车辆各种转向机构就基本原理来说是相同的,都是依靠改变两侧驱动轮上的驱动力,使其达到不同时速来实现转向的。
(一)双履带式车辆转向运动学履带车辆不带负荷,在水平地段上绕转向轴线O 作稳定转向的简图,如图7-12所示。
从转向轴线O 到车辆纵向对称平面的距离R ,称为履带式车辆的转向半径。
以T O 代表轴线O 在车辆纵向对称平面上的投影,T O 的运动速度v '代表车辆转向时的平均速度。
则车辆的转向角速度Z ω为:图7-12 履带式车辆转向运动简图R v Z '=ω (7-37)转向时,机体上任一点都绕转向轴线O 作回转,其速度为该点到轴线O 的距离和角速度Z ω的乘积。
所以慢、快速侧履带的速度1v '和2v '分别为:Z Z Z Z B v B R v B v B R v ωωωω5.0)5.0(5.0)5.0(21+'=+='-'=-=' (7-38)式中:B —履带车辆的轨距。
根据相对运动原理,可以将机体上任一点的运动分解成两种运动的合成:(1)牵连运动,;(2)相对运动。
由上可得:B R B R v v 5.05.021+-=''(二)双履带式车辆转向动力学 1、牵引平衡和力矩平衡图7-13给出了带有牵引负荷的履带式车辆,在水平地段上以转向半径R 作低速稳定转向时的受力情况(离心力可略去不计)。
转向行驶时的牵引平衡可作两点假设:(1) 在相同地面条件下,转向行驶阻力等于直线行驶阻 力,且两侧履带行驶阻力相等,即:ff f F F F 5.021='='(2)在相同的地面条件和负荷情况下,γcos x F 相当于直 线行驶的有效牵引力KP F ,即:图7-13 转向时作用在履带车辆上的外力γcos x KP F F =所以回转行驶的牵引平衡关系为:K KP f K Kx f f K KF F F F F F F F F F =+='+'+'+'='+'212121cos γ (7-39)设履带车辆回转行驶时,地面对车辆作用的阻力矩为μM ,在负荷xF 作用下总的转向阻力矩为:γμsin x T C F a M M += (7-40)式中:T a —牵引点到轴线21O O 的水平距离。
挖掘机履带的转向原理

挖掘机履带的转向原理挖掘机履带的转向原理挖掘机履带是一种重型机械设备,用于在工程和建筑现场进行土方作业和挖掘作业。
履带的转向是挖掘机行驶和转向的关键部分,它能够让挖掘机在复杂的地形和狭窄的工地中自如地行驶和转向。
在这篇文章中,我将详细介绍挖掘机履带的转向原理。
挖掘机履带的转向原理涉及到液压系统、驱动系统和转向机构。
首先,我们来看一下挖掘机履带的液压系统。
挖掘机的液压系统是用来驱动各种液压设备的动力系统,包括履带的驱动、转向和控制。
挖掘机的液压系统通常由液压泵、液压缸、液压油箱、阀门和管道组成。
其中,液压泵负责将液压油从油箱中抽取并向各个液压设备传送,液压缸则负责将液压能转换为机械能,实现各种动作。
在履带的转向中,液压系统起到了至关重要的作用。
其次,挖掘机履带的驱动系统是实现履带行驶的核心部分。
驱动系统由发动机、传动装置和履带组成。
挖掘机的发动机产生动力,并通过传动装置将动力传送到履带上,使其旋转从而推动挖掘机行驶。
在履带的转向中,驱动系统也发挥了重要作用。
最后,挖掘机履带的转向机构包括了液压缸、操纵杆和液压阀等部件。
在挖掘机行驶中,驾驶员通过操纵杆控制液压缸的伸缩,改变履带的速度和方向,从而实现挖掘机的转向。
液压阀则起到了调节液压缸的作用,使得履带的转向可以实现精准控制。
总的来说,挖掘机履带的转向原理是通过液压系统提供动力,驱动系统传送动力,转向机构控制动力,在驾驶员的操作下实现履带的转向。
这种转向原理在挖掘机的行驶和作业中起到了至关重要的作用,能够提高机械设备的灵活性和作业效率。
挖掘机履带的转向原理在实际应用中有着多种形式。
例如,有些挖掘机配备了差速锁系统,可以通过控制差速锁来实现履带的单侧启动,从而实现弯道行驶。
还有一些挖掘机配备了自动转向系统,可以通过GPS等技术实现自动导航和自动转向。
这些系统在提高挖掘机操作便利性和安全性上有着重要作用。
总的来说,挖掘机履带的转向原理是一个涉及多个系统的综合问题。
三种转向器的优缺点

三种转向器的优缺点第一篇:三种转向器的优缺点齿轮齿条在传动过程中会有自己所独有的运动特点:齿轮传动用来传递任意两轴间的运动和动力,其圆周速度可达到300m/s,传递功率可达105KW,齿轮直径可从不到1mm到150m以上,是现代机械中应用最广的一种机械传动。
齿轮齿条传动与带传动相比主要有以下优点:(1)传递动力大、效齿轮传动的特点。
齿轮传动用来传递任意两轴间的运动和动力,其圆周速度可达到300m/s,传递功率可达105KW,齿轮直径可从不到1mm到150m以上,是现代机械中应用最广的一种机械传动。
(2)寿命长,工作平稳,可靠性高;(3)能保证恒定的传动比,能传递任意夹角两轴间的运动。
齿轮传动与带传动相比主要缺点有:(1)制造、安装精度要求较高,因而成本也较高;(2)不宜作远距离传动。
循环球式转向器的英文名称是Recirculating Ball Steering Gear。
循环球式转向器由两对传动副组成,一对是螺杆、螺母,另一对是齿条、齿扇或曲柄销。
在螺杆和螺母之间装有可循环滚动的钢球,使滑动摩擦变为滚动摩擦,从而提高了传动效率。
这种转向器的优点是,操纵轻便,磨损小,寿命长。
缺点是结构复杂,成本高,转向灵敏度不如齿轮齿条式。
因此逐渐被齿轮齿条式取代。
但随着动力转向的应用,循环球式转向器近年来又得到广泛使用。
优点:传动比较大,具有自锁功能缺点:传动效率不高第二篇:三种常见的汽车贷款方式的优缺点银行汽车贷款、信用卡分期付款、汽车金融公司贷款是目前最为常见的三种车贷方式,但是它们各自存在哪些优缺点,你了解吗?今天就跟随升隆贷小编简单给你们介绍一下吧。
一、银行汽车贷款1、优点(1)额度高:银行汽车贷款额度最高可达到车辆价值的80%,但具体额度银行会根据借款人的个人资质情况来确定。
(2)期限长:这种贷款方式的最长期限可达到五年,有效缓解了购车者的资金压力。
2、缺点(1)利率高:由于汽车属于消耗品,银行为了控制信贷风险给出的贷款利率较高,一般会在基准利率上上浮10%-30%。
针对履带式移动平台转向性能的探究
针对履带式移动平台转向性能的探究履带式移动平台在工农业及军事领域应用广泛,然而在转向时传统履带式移动平台效率低、可控性能差,同时对履带板的磨损极为严重,针对上述问题,本文提出了一种新型的履带板结构,在传统履带板的基础上添置一定角度可以自由滚动的小辊轮,在平台转向时可以将履带板与地面间的滑动摩擦力部分转化为小辊轮与地面间的滚动摩擦力。
在履带板上添加小辊轮的方式为提升履带式移动平台的转向性能提供了一种新的尝试。
标签:履带式;移动平台;转向性能0 引言现如今行走装置主要分为履带式和轮式两种,轮式行走装置机动性能强,噪音低,但对路面的要求很高;而履带式行走装置,运动平稳、有极强的越野能力,能在特定的环境和条件下快速顺利的完成指定路径的运动[1]。
在军事领域中,由于战场地形地貌相对复杂,对履带式装甲车辆来说,转向性能是保证车辆技战术发挥的重要保障,因而需要更深入的履带式装甲车辆的转向性能的进行研究。
1 履带式移动平台转向时存在的问题履带式移动平台的转向性能是其机动性能中的最重要的一部分,其转向的实现主要通过行进过程中两侧履带不同的速度造成的相对速度差得以实现。
现如今在各领域中投入使用的履带式移动平台在崎岖不平的路面上都可以正常行驶,不过在转向行驶中都会存在一定的问题,主要有:(1)现如今已使用的履带式移动平臺,无论是工农业中使用的履带式铲车还是军事领域中的履带式装甲车辆,在转向时都需要一定的转向半径,在大弯度的路面进行转向时,会存在一定的困难,对于现在的传统履带式行走装置,转向时对路面存在一定的要求,因此转向性能具有一定的局限性。
(2)履带式移动平台的转向阻力大,其消耗的功率也大。
平台在转向时,与轮式平台不同,平台是通过履带板横向刮动地面进行转向,在一定特殊的环境下需要很小的转向半径,加上履带式移动平台的重量相比轮式平台明显大很多,会导致很大的功率消耗,大功率的损耗对平台的零部件也是一种巨大的损耗[2]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陈泽宇, 张承宁, 李军求, 武小花
( 北京理工大学机械与车辆工程学院, 北京 100081 )
摘 要: 对中心差速、内侧降速和外侧升速3 种履带车辆转向方式进行运动学和动力学分析; 对3 种方式下的转
向半径的变化规律进行了研究; 对比了3 种转向方式的内外侧履带功率需求; 在Ma tlab / Simu link 中进行了仿真。
1) 通过对履带车辆转向运动学的分析与仿真研
究, 得到如下结论: 3 种情况的转向半径变化率相同,
但转向半径的数值不同; 转向角速度相同时, 内侧降
速式的转向半径最小, 中心差速式稍大, 外侧升速式
最大。
2) 功率需求分析表明, 转向角速度相同时, 内侧
降速式转向的功率需求是最小的, 中心差速式较大,
ML
B
+ (
Iz
B
- DmB
4
)X# ] @u0
( 9)
式中: 功率P 的第1个下标1, 2, 3分别对应内侧
降速式、中心差速式和外侧升速式3种转向方式; 第2
# 44#
2010年4 月 农机化研究 第4期
个下标1, 2 分别表示内侧履带和外侧履带。通过式
程为
F 2 - F 1 - 2FR = Dmu#
(F2 + F 1 ) B
2 - ML = IzX#
ML = LGL
4
L =
Lmax
0. 925 + 0. 15R /B
R = u /X
P 1 =
F 1u1
1 000
P 2 =
F 2u2
1 000
度X与R 之间的关系[ 3]为
X =
u1
R - B
2
=
u2
R + B
2
= uR
=
uy
R + y
( 2)
当y = 0 时, 转向方式对应着中心差速式; 当y =
0. 5B 时, 对应内侧降速式; 当y = - 0. 5B 时, 对应外
侧升速式。
由式( 2)可知, 转向半径R = u /X, 对R 积分得
使其降速, 来实现两侧履带的速差, 有些资料也将这
种方式称作独立式转向[ 1- 2] ; 三是外侧升速式, 即内侧
履带速度不变, 保持转向前的直驶车速, 通过外侧履
带速度增加来实现车辆的转向。
本文即针对履带车辆的这3种典型转向方式展开
研究, 并对3种方式的运动学特性和功率需求进行对
比分析, 讨论其异同点, 为转向策略的建立提供理论
1. 2 内侧降速式
内侧降速的转向方式中, 外侧履带速度u2 始终保
持不变, 等于转向前的车辆直驶速度u0, 内侧履带速
度降低来实现转向所需要的速差, 则有
u2 = u0; u#
2 = u# + B
2
X# = 0 ( 5)
1. 3 外侧升速式
外侧升速转向方式中, 内侧履带速度u1 不变, 始
为合适的选择。
关键词: 履带车辆; 转向特性; 转向方式; 仿真
中图分类号: U463. 4 文献标识码: A 文章编号: 1003- 188X( 2010) 04 - 0043- 04
0 引言
转向是履带车辆行驶理论中的核心问题。随着履
带车辆在农业机械、矿山机械甚至军车领域的广泛应
用, 对其转向理论的研究显得十分必要。履带车辆的
通讯作者: 张承宁( 1963 - ), 男, 安徽太湖人, 教授, 博士生导师, ( E -
mail)mrzh chn@ b it. edu. cn。
当车辆转向时, 车体除了做平移运动, 还做旋转运动,
车体存在一个角速度X。此时, 两侧履带的速度不同,
外侧履带的速度u2 高于内侧履带u1, 且有如下关系
R #
= u# X- X# u
X2 ( 3)
# 43#
2010年4 月 农机化研究 第4期
1. 1 பைடு நூலகம்心差速式
中心差速转向方式中, 外侧履带速度增加, 内侧
履带速度相应下降, 车辆中心速度u 始终保持转向前
的速度u0 不变, 所以
u = u0; u# = 0 ( 4)
u1 = u - B
2
X; u2 = u + B
2
X ( 1)
转向时, 各点的速度如图1所示。其中: u 为当前
时刻车辆中心的速度; u1 和u2为两侧履带速度; u0 为
转向前的直驶车速; B 为履带中心距; R 为转向半径。
图1 转向速度图
在转向过程中, 两侧履带速度u1 和u2, 转向角速
运动学和动力学分析表明: 在相同转向速度下, 3种方式转向半径的变化率相同, 但转向半径的数值不同, 相比之
下内侧降速式的转向半径最小。功率需求分析和仿真结果表明: 内侧降速式转向的外侧履带功率需求最小, 中
心差速式较大, 外侧升速式最大; 内侧降速式转向可以实现较小的转向半径, 而功率需求最低, 是3 种方式中最
外侧升速式最大。
3) 相比而言, 内侧降速式的外侧履带需求功率较
小, 而实现的转向幅度大, 是最理想的转向方式。其
转向过程中的车速变化特征也符合驾驶员的操作习
惯, 在制定控制策略时应优先选用。
参考文献:
[ 1] 韩雪海, 刘侃, 周玉珑. 履带车辆行驶力学[M] . 北京: 国
防工业出版社, 1988: 112 - 116.
员的操作意图。一般认为, 当驾驶员把方向盘打到一
个固定的转角时, 车辆应该对应一个固定的转向半
径, 即转半径R 应该稳定在一个固定的值[ 5- 6]。就此
而言, 上述3种转向方式都是满足要求的。从理论上
讲, 只要建立合理的控制策略, 都可以满足使用要求。
但内侧降速式转向可以实现相对更小的转向半径。
2 功率需求分析
2. 1 转向动力学模型
接下来对3种转向方式的动力学特性进行对比分
析, 履带车辆转向动力学模型[ 4]如图2所示。
内侧履带制动时, 制动力为F1, 方向与车辆运动
方向相反; 外侧履带驱动时, 驱动力为F2。假设车辆
垂直载荷均匀分布, 地面阻力系数为常数, 忽略风阻
和离心力影响, 忽略滑转和滑移的影响, 建立平衡方
转向半径一直减小; 随着转向角加速度X#
逐渐降低,
转向半径减小的速度越来越小; 当X# 趋近于0时, 转
向半径达到稳态。整个过程中, 3 种转向方式的转向
半径变化率是完全相同的, 均与理论分析相一致。
图5( c)和图5( d)为3种转向方式的转向轨迹与
车速的仿真结果。其中, 标号1为内侧降速式, 标号2
( 8)
式中 P 1, P2 ) 内侧制动回收功率和外侧驱动功率;
ML ) 转向阻力矩;
Lmax ) 转向半径为0. 5B 时的转向阻力系数, 可
查表获得;
D) 旋转质量系数;
Iz ) 车辆的转动惯量。
图2 转向动力学模型
2. 2 3种转向方式功率需求
结合式( 4)、式( 5)、式( 6)和式( 8 ), 可以得到3
( 9)中P 12, P22和P32表达式的对比分析, 不难得出结
论为: 对外侧履带功率需求而言, 内侧降速式是最低
的, 中心差速式则相对要大一些, 外侧升速式最大; 而
内侧履带的制动回馈功率的比较结果无法直接看出,
可以通过仿真分析进一步获得。
3 仿真分析
为了对上述理论分析进行验证, 使用Matlab /Sim2
R #
= - 1
X2u0 X# ( 7)
这说明, 当X变化率一定的时候, 3种转向方式中
转向半径的变化规律是一致的。从式( 7) 可以看出:
随着X的增大, 而转向半径会迅速减小; 当X的导数
趋近于0时, 转向半径趋近于一个稳定值, 转向过程
趋于稳定。
转向控制的目标是使车辆能够尽可能地实现驾驶
u link建立仿真分析模型, 给定X# 输入信号如图3所
示。在0到1s时, X# 为1 rad /s2, 之后开始逐渐降低;
到4s时, X# = 0, 模拟在转向中随转向半径的减小, 转
向阻力矩逐渐增大, 导致X# 逐渐降低, 直到X# = 0达到
稳态的过程。
观察在给定这同一X#
信号的情况下(即同一转向
速式外侧履带需求是最低的, 这与前面的理论分析相
# 45#
2010年4 月 农机化研究 第4期
符。可见, 如果采用双侧独立驱动方式的话, 内侧降
速式转向方式对电机的功率要求是最低的。
从图6( b)的仿真结果可以观察出: 在转向初期, 3
种转向方式的内侧履带的再生制动功率相差不大, 其
[ 2] 鲁连军, 孙逢春, 翟丽. 基于MATLAB SIMULINK 的电传
动履带车辆转向性能仿真[ J] . 兵工学报, 2006, 27( 1 ):
69- 74.
[ 3] 汪明德. 坦克行驶原理[M ]. 北京: 国防工业出版社,
为中心差速式, 标号3为外侧升速式。可以清楚地看
出: 内侧降速式所完成的转向轨迹的圆弧最小, 即可
实现最大幅度的转向; 中心差速式所达到的转向幅度
次之; 外侧升速式所达到的转向幅度最小。