ZYNQ的启动原理和配置
zynq的启动方式
Zynq-7000AP SOC器件有效利用了片上CPU来帮忙配置。
在没有外部JTAG的情况下,处理系统(PS)与可编程逻辑(PL)都必须依靠PS来完成芯片的初始化配置。
ZYNQ的两种启动模式:从BootROM主动启动,从JTAG被动启动。
ZYNQ的启动配置分多级进行的。
配置至少需要两步,但通常按如下三个阶段进行:阶段0:该阶段简称为BootROM,控制着整个芯片的初始化过程。
放在BootROM中的代码是固化的,不可修改的,处理器核在上电或者热启动时自动执行这部分代码。
阶段1:该阶段的启动加载器(FSBL)也可以由用户代码控制。
阶段2:这阶段通常可以是用户的PS端的设计代码,当然也可以是第二阶段的启动加载器(SSBL),这个阶段可以完全由用户控制,是可选的。
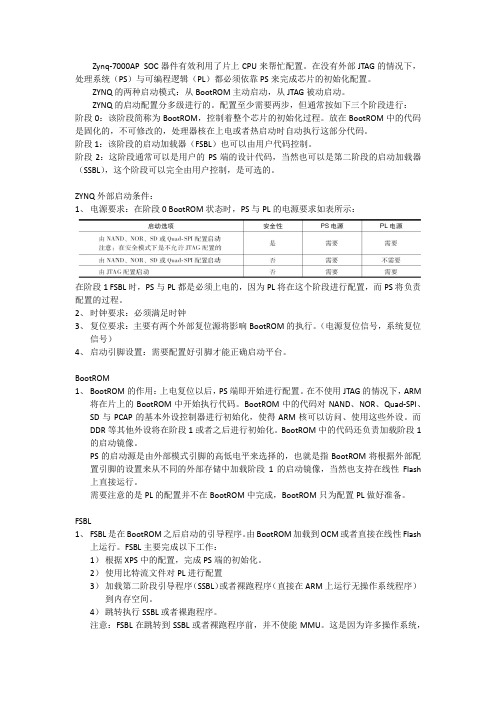
ZYNQ外部启动条件:1、电源要求:在阶段0 BootROM状态时,PS与PL的电源要求如表所示:在阶段1 FSBL时,PS与PL都是必须上电的,因为PL将在这个阶段进行配置,而PS将负责配置的过程。
2、时钟要求:必须满足时钟3、复位要求:主要有两个外部复位源将影响BootROM的执行。
(电源复位信号,系统复位信号)4、启动引脚设置:需要配置好引脚才能正确启动平台。
BootROM1、BootROM的作用:上电复位以后,PS端即开始进行配置。
在不使用JTAG的情况下,ARM将在片上的BootROM中开始执行代码。
BootROM中的代码对NAND、NOR、Quad-SPI、SD与PCAP的基本外设控制器进行初始化,使得ARM核可以访问、使用这些外设。
而DDR等其他外设将在阶段1或者之后进行初始化。
BootROM中的代码还负责加载阶段1的启动镜像。
PS的启动源是由外部模式引脚的高低电平来选择的,也就是指BootROM将根据外部配置引脚的设置来从不同的外部存储中加载阶段1的启动镜像,当然也支持在线性Flash 上直接运行。
需要注意的是PL的配置并不在BootROM中完成,BootROM只为配置PL做好准备。
zynq原理
zynq原理
Zynq是一款由Xilinx开发的可编程逻辑器件(FPGA)和ARM处理器(通常是Cortex-A9)集成在一起的系统级芯片(SoC)。
Zynq芯片结合了可编程逻辑的灵活性和ARM处理器的处理能力,使得它可以用于各种应用领域,包括通信、工业控制、嵌入式视觉等。
Zynq芯片采用了一种称为Programmable System Integration(PSI)的架构,该架构将FPGA和ARM处理器集成在一起,通过高速片内总线(AXI总线)进行通信。
Zynq芯片的主要组成部分是可编程逻辑部分和处理器系统部分。
可编程逻辑部分由Xilinx FPGA实现,可以根据用户的需求进行配置和重构。
处理器系统部分包括ARM Cortex-A9处理器、存储器控制器、高速IO接口等。
ARM Cortex-A9处理器是Zynq芯片的主处理器,它具有高性能和低功耗的特点。
它可以运行各种操作系统,如Linux和RTOS,提供强大的处理能力和丰富的软件支持。
Zynq芯片还包括一些外设接口,如以太网接口、USB接口、SD卡接口等,以便与外部设备进行通信和数据交换。
Zynq芯片的设计和开发可以使用Xilinx提供的开发工具套件,如Vivado 和SDSoC。
这些工具提供了完整的设计流程,包括硬件设计、软件开发和系统集成,使开发人员能够快速、高效地开发基于Zynq的应用系统。
XilinxZYNQ-7000平台简介

XilinxZYNQ-7000平台简介平台介绍Zynq7000是赛灵思公司(Xilinx)推出的⾏业第⼀个可扩展处理平台Zynq系列。
旨在为视频监视、汽车驾驶员辅助以及⼯⼚⾃动化等⾼端嵌⼊式应⽤提供所需的处理与计算性能⽔平。
在2010年4⽉硅⾕举⾏的嵌⼊式系统⼤会上,赛灵思发布了可扩展处理平台的架构详情,这款基于⽆处不在的ARM处理器的SoC可满⾜复杂嵌⼊式系统的⾼性能、低功耗和多核处理能⼒要求。
赛灵思可扩展处理平台芯⽚硬件的核⼼本质就是将通⽤基础双ARMCortex-A9MPCore 处理器系统作为“主系统”,结合低功耗28nm⼯艺技术,以实现⾼度的灵活性、强⼤的配置功能和⾼性能。
由于该新型器件的可编程逻辑部分基于赛灵思28nm7系列FPGA,因此该系列产品的名称中添加了“7000”,以保持与7系列FPGA的⼀致性,同时也⽅便⽇后本系列新产品的命名。
Zynq-7000系列的可编程逻辑完全基于赛灵思7系列FPGA架构来设计,可确保28nm系列器件的IP核、⼯具和性能100%兼容。
最⼩型的Zynq-7000、Zynq-7010和Zynq-7020均基于专门针对低成本和低功耗优化的Artix-7系列;较⼤型的Zynq-7030和Zynq-7040器件基于包括4⾄12个10.3Gbps收发器通道,可⽀持⾼速⽚外连接的中端Kintex-7系列。
所有四款产品均采⽤基于2个12位1MspsADC(模数转换器)模块的新型模拟混合信号模块。
Zynq®-7000 SoC 系列集成 ARM® 处理器的软件可编程性与 FPGA 的硬件可编程性,不仅可实现重要分析与硬件加速,同时还在单个器件上⾼度集成 CPU、DSP、ASSP 以及混合信号功能。
Zynq-7000 系列包括单核 Zynq-7000S 器件和双核 Zynq-7000 器件,是单位功耗性价⽐最⾼的全⾯可扩展的 SoC 平台,可充分满⾜您的独特应⽤需求。
ZYNQMPSoc的启动过程

ZYNQMPSoc的启动过程ZYNQ启动是由ARM引导FPGA,以及用户程序的加载。
预配置阶段Pre-configuration stage1. 通过上电复位(POR),将PMU(平台管理单元/Platform Management Unit)从复位状态唤醒,提供如下操作:o复位低压域LPD寄存器o复位全电源域FPD寄存器o复位PMU的RAMo复位PMU处理器的TLB内存o检查LPD、AUX、专用IO等区域电压o复位CSU、LPD、FPD的内存区2.执行PMU ROM中的预启动代码,以执行复位操作(包括配置安全单元CSU)复位),该阶段结束的标志是CSU复位的释放。
预启动代码进行的初始化操作:•初始化PS Sysmon单元和启动所需要的PLL•清除PMU RAM 和 CSU RAM区域•验证PLL锁•利用PS Sysmon验证LPD、AUX、I/O的范围•清除低压域(LPD)和全电源域(FPD)配置阶段Configuration stageCSU复位后,初始化OC-RAM,将FBSL加载到OC-RAM(on-chip RAM),CSU加载PMU用户固件(PMU FW:firmware)到PMU RAM,若没有则不加载。
在ZYNQ上运行程序的时候,Boot Rom直接固化在硬件中,开发者无法修改。
FSBL(first stage boot loader)是第一阶段的加载程序,经过这个阶段,后面系统才能够运行裸奔程序或者是引导操作系统的u-boot。
用户可以选择用cortex-a53制作启动的FSBL文件,也可以选择用cortex-r5来制作启动的FSBL文件。
处理器开始执行FSBL代码。
FSBL(first-stage boot loader)的作用如下: 1.初始化PS端配置,如:MIO、PLL、DDR、QSPI、SD等。
2.加载PL端程序,即:加载bitstream 3.搬运用户程序到DDR,并跳转执行。
zynq矿卡原理

zynq矿卡原理Zynq矿卡原理随着人工智能和加密货币的兴起,对高性能计算和数据处理的需求日益增加。
而Zynq矿卡作为一种集成了FPGA(可编程逻辑门阵列)和ARM处理器的硬件平台,成为了满足这些需求的理想选择。
本文将介绍Zynq矿卡的原理和工作方式。
我们来了解一下Zynq矿卡的结构。
Zynq矿卡由一个ARM处理器和一个FPGA组成,它们通过一个高速总线相连。
ARM处理器负责运行操作系统和控制任务,而FPGA则负责进行高性能计算和数据处理。
这种结构的独特之处在于,FPGA可以根据需要进行重新配置,以适应不同的计算任务。
这使得Zynq矿卡具有高度的灵活性和可编程性。
在Zynq矿卡中,ARM处理器主要负责控制和协调任务,而FPGA 则负责进行高性能计算。
ARM处理器通常运行一个实时操作系统(RTOS),如FreeRTOS或VxWorks,以保证任务的实时性。
它可以通过高速总线与FPGA进行通信,向FPGA发送指令和数据,同时接收FPGA返回的计算结果。
这种协同工作方式使得Zynq矿卡能够充分发挥ARM处理器和FPGA的优势,实现高性能计算和数据处理。
FPGA作为Zynq矿卡的核心组件,具有独特的可编程性和并行计算能力。
FPGA中包含大量的可编程逻辑单元(PL),可以根据需要进行重新配置。
这意味着FPGA可以根据不同的应用场景进行优化,提高计算效率和性能。
此外,FPGA还包含一些硬核模块(PS),如DDR控制器、PCIe接口等,用于支持ARM处理器的功能。
在使用Zynq矿卡进行高性能计算时,首先需要编写FPGA的硬件描述语言(HDL)代码,描述计算任务的逻辑。
然后,使用FPGA 开发工具将HDL代码编译成位流文件(bitstream),并将其加载到FPGA中。
一旦位流文件被加载到FPGA中,FPGA就可以根据HDL代码进行计算。
ARM处理器可以通过高速总线与FPGA进行通信,向FPGA发送指令和数据,并接收计算结果。
Zynq启动流程

Zynq启动流程前⾔Zynq启动流程和ARM处理器类似,PS部分是启动和配置过程的主设备,芯⽚引导必须由处理器驱动,系统上电复位后会读取设备模式引脚来决定从什么设备启动芯⽚。
如下表Boot Devices条⽬所⽰,其中黄⾊代表该条⽬下的默认设置,⽐如Boot Devices默认设置是SD Card,默认从SD卡启动芯⽚下图中的JP7-JP11的5个条线帽就是⽤于设置设备模式引脚电平的启动步骤PS确定好从什么设备启动后,接着的启动过程分为以下三个阶段0. Stage-0 执⾏BootROM代码,不可修改1. Stage-1 执⾏FSBL(first boot loader)代码,⽤户可修改。
如果是裸机程序也可以不需要这个阶段直接跳到下⼀阶段。
2. Stage-2 执⾏⽤户裸机程序或者操作系统的启动引导程序SSBL(second boot loader)关于BootROM:位于Zynq⽚内,功能是初始化L1 cache和基本的总线系统,以及从指定的外部存储器加载Stage-1的FSBL代码到⽚内存储器(OCM)。
但是要使Stage-0之后的代码被Stage-0的BootROM识别,还需要为Stage-0之后的代码(可能是Stage-1的FSBL,也可能是Stage-2的裸机程序,因为没有调⽤BSP函数的裸机程序是可以不需要FSBL的)添加⼀个头部,制作成引导镜像。
可以使⽤SDK的BootGen⼯具为裸机程序elf⽂件创建引导镜像Boot.bin,将其复制到SD卡中,并且设置板⼦从SD卡启动就可以执⾏程序。
使⽤SDK⼯具创建SD卡启动镜像BOOT.BIN= f(FSBL.elf+PL.bit+PS.elf)PL.b it和PS.e lf采⽤中⽣成的PL.bit和PS.elf。
制作F SB L.e lf 新建Zynq FSBL⼯程等待⼯程建⽴完毕,FSBL.elf就在⼯程⽂件夹的Debug⽂件夹下制作B OOT.B I N使⽤SDK的Create Boot Image选择好output路径放置⽣成的BOOT.BIN和output.bif。
详细解读Zynq的三种启动方式(JTAG,SD,QSPI)
详细解读Zynq的三种启动方式(JTAG,SD,QSPI)本文介绍zynq上三种方式启动文件的生成和注意事项,包括只用片上RAM (OCM)和使用DDR3两种情况。
JTAG方式JTAG方式是调试中最常用的方式,在SDK中在Project Explorer窗口工程上右键-Debug As-Debug ConfiguraTIons可以看到以下窗口首次打开左边窗口中Xilinx C/C++ applicaTIon(GDB)下没有子项,这时双击Xilinx C/C++ applicaTIon(GDB)即可新建一个调试;这时右边窗口会自动填充如上图,若没有则手动填入;在右边ApplicaTIon窗口指定要下载调试的.elf文件;在右边STDIO Connection可以指定标准输入输出串口,即printf打印串口,若这里选择开发板上uart的com口,则调试时printf的信息打印到调试时Console窗口,同时也可从Console窗口输入数据,以此将数据通过串口发送到开发板上以上设置完成后点击Debug即可开始调试;若以上在Project Explorer窗口工程上右键-Run As-Run Configurations;配置与此类似,最后点击run即可开始运行,只是不是调试而是直接上板运行。
只用OCM只用OCM指不使用DDR3的方式,与使用DDR3的方式略有不同。
这里不用FSBL来加载PL部分的.bit文件和第二阶段启动程序(裸机程序),而直接用BootROM加载裸机程序到OCM,即将裸机程序当做FSBL来运行,当然还要以下处理才可以:包含进头文件:#include ps7_init.h在裸机程序main函数开始处调用:ps7_init()从design_1_wrapper_hw_platform_1目录复制ps7_init.c和ps7_init.h文件到裸机程序所在的src目录中注意:这里样调用ps7_init()只适用于只用OCM的情况,经测试打开DDR3后再这样调用会在ps7_init()中初始化失败,调试发现在初始化PLL时失败(原因未知)。
zynq硬件设计流程
zynq硬件设计流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!Zynq 是赛灵思公司(Xilinx)推出的一款集成了 ARM 处理器和 FPGA (现场可编程门阵列)的片上系统(SoC)。
Xilinx Zynq 开发手册

HZZD-MEZYNQ 硬件使用手册
第 1 页 共 38 页
阅前须知
阅前须知
声明
北京合众致达科技有限公司保留随时对其产品进行修正、改进和完善的权利,客户在下 单前应获取相关信息的最新版本,并验证这些信息是正确的。本文档一切解释权归北京合众 致达科技有限公司所有。
北京合众致达科技有限公司 © 2012 版权所有 京 ICP 备 12015578 号-1 技术支持:35 互联
HZZD-MEZYNQ 硬件使用手册
HZZD-MEZYNQ 硬件使用手册
主题 文档号 创建时间 最后修改 版本号 文件名 文件格式
HZZD-MEZYNQ 硬件使用手册 1.1 2015-08-04 2016-04-18 1.1 HZZD-MEZYNQ rd Document
HZZD-MEZYNQ 硬件使用手册
第 2 页 共 38 页
修改记录
修改记录
版本号 1.0 1.1
日期 2015.11.30 2016.04.18
修改人 赵彦彦 赵彦彦
注释 初始版本 更正扩展接口处信号描述错误
HZZD-MEZYNQ 硬件使用手册
第 3 页 共 38 页
目录
目录
1 概述.............................................................................................................................................6 1.1 硬件结构框图.................................................................................................................... 6 1.2 硬件实物图........................................................................................................................ 7
zynq linux dma——proxy原理 -回复

zynq linux dma——proxy原理-回复zynq linux dma—proxy原理DMA(直接内存访问)代理是在Zynq SoC(系统级芯片)上运行的一种特殊的设备驱动程序,用于为与PS(处理系统)相连的外设提供高性能的数据传输。
该代理使得外设能够直接访问处理器上的内存而无需通过CPU 的中断处理和读写操作。
这篇文章将深入探讨Zynq Linux DMA-Proxy 的原理,并一步一步地解释其工作原理。
一、什么是Zynq SoC?在我们深入了解Zynq Linux DMA-Proxy之前,让我们先了解一下什么是Zynq SoC。
Zynq SoC是Xilinx公司推出的一种异构计算平台,它将处理器系统(PS)和可编程逻辑(PL)集成到同一块芯片中。
处理器系统是一个基于ARM Cortex-A9的嵌入式处理器,可运行Linux等操作系统。
可编程逻辑部分则是一个可配置的FPGA(现场可编程门阵列),可以根据应用需求进行各种硬件设计。
二、什么是DMA?DMA代表直接内存访问(Direct Memory Access),这是一种高效的数据传输机制,可以绕过CPU来直接访问内存。
使用DMA可以减少处理器的负载,提高数据传输的性能。
三、什么是DMA-Proxy?DMA-Proxy是一个为Zynq SoC上的Linux驱动开发的模块,与外设设备进行通信,确保数据的快速有效传输。
DMA-Proxy模块允许外设通过DMA直接访问处理器上的内存区域,而不需要CPU的干预。
四、DMA-Proxy的工作原理1. 驱动程序初始化DMA-Proxy的工作始于设备驱动程序的初始化。
驱动程序会使用DMA-Proxy模块的相关API进行初始化,包括DMA的配置和通道的分配。
2. 缓冲区分配驱动程序为DMA-Proxy分配内存缓冲区,这些缓冲区用于向外设传输数据。
根据外设的要求,驱动程序可能需要分配多个缓冲区。
3. DMA传输配置DMA-Proxy驱动程序将配置信息写入DMA控制器的寄存器,包括源地址、目标地址和传输长度。
从SD卡启动ZYNQ(裸机)

从SD卡启动ZYNQ(裸机)从SD卡中启动ZYNQ7020中的linux系统(裸机)看了⼀整的⽂档,就为了从SD卡中启动ZYNQ中的系统,⽹上的资料⼤同⼩异,主要还是⽣成BOOT.bin⽂件(现在先是进⾏裸机的运⾏)。
这个⽂档打算从以下⼏个⽅⾯进⾏说明:⼀、现在将⽹上的⽣成的BOOT.bin⽂件的流程做⼀个总结(或者说是copy过来)⾸先讲⼀下BOOT.bin⽂件的构成:BOOT.bin⽂件=PL部分.bit+FSBL.elf+PS部分.elf⽂件。
(design.bit⽂件就是⽣成的⽐特流⽂件;FSBL.elf⽂件是在Vivado的SDK中⽣成的,下⾯有这部分的介绍;⼯程的.elf⽂件就是在SDK中运⾏程序时建⽴的⽂件)由于上⾯⽤到了FSBL.elf⽂件,所以这⾥要讲解⼀下如何⽣成FSBL.elf⽂件。
打开SDK软件,在菜单栏中依次选择“File——New——Application Project”,出现下⾯的界⾯:,并写⼊FSBL,在Hardware Platform中选择如何圈中的选项(很重要)!再在点击Next,出现如下界⾯,选择zynq FSBL,点击finish,等待编译(⾃动编译)完成即可。
⾄此,FSBL.elf⽂件就已经⽣成完毕了。
将三个⽂件拷贝到⼀个独⽴的⽂件下⾯,为制作BOOT.bin做准备⼯作。
现在制作BOOT.bin所需的⽂件都已经准备完毕了,接下来就来讲解如何利⽤SDK软件来⽣成BOOT.bin⽂件。
步骤如下:依次执⾏xilinx tools---creat biit image,之后出现如下界⾯:在output BIF file path中选择⽣成⽂件的⽬录(这个⽬录可以任意)。
第⼆步,点击add将三个⽂件添加进来。
点击add之后出现如下界⾯,需要注意两点:第⼀点是:三个⽂件的添加顺序必须是FSBL.elf、PL部分.bit、PS部分.elf。
第⼆点是:在添加三个⽂件时FSBL.elf⽂件在下图中的Partitiontype选择bootloader,其余两个⽂件选择datafile。
zynq原理 gpio

zynq原理gpioZYNQ(Zynq-7000)是一款ARM+FPGA的SoC芯片,它将ARM处理器和FPGA 集成在单个芯片中。
在ZYNQ中,GPIO(General-Purpose Input/Output)是一个非常重要的外设,它可以被配置为输入或输出模式,用于实现各种数字信号的输入/输出操作。
在ZYNQ中,GPIO被分为两部分:MIO(Multi-Purpose I/O)和EMIO(Expansion Multi-Purpose I/O)。
MIO用于连接PS(Processing System)端的引脚,而EMIO用于连接PL(Programmable Logic)端的引脚。
MIO和EMIO都可以配置为32位或16位模式,并且可以独立编程。
在ZYNQ中,MIO和EMIO的GPIO都可以通过寄存器进行配置和控制。
每个GPIO引脚都有一个对应的寄存器,用于配置引脚的模式、输出类型、输出速度等参数。
此外,通过读取GPIO寄存器的值,可以检测引脚的电平状态,从而实现对外部信号的读取。
同时,通过写入不同的值到GPIO寄存器,可以控制引脚的电平状态,实现对外围设备的控制。
在开发ZYNQ应用时,可以使用SDK(Software Development Kit)提供的库函数来操作GPIO。
这些库函数提供了方便的接口,可以方便地配置GPIO、读取引脚状态和控制引脚输出。
通过合理地使用这些库函数,可以方便地实现各种数字信号的处理和控制功能。
总之,ZYNQ的GPIO是一个强大的外设,可以实现各种数字信号的处理和控制功能。
通过合理地使用SDK提供的库函数,可以方便地实现各种应用场景下的数字信号处理和控制功能。
ZYNQ实验手册
Lab1 zybo standalone控制GPIO和传感器一、实验目的学会使用zybo进行SDK编程,点亮LED,驱动DS18B20传感器测量温度,使用Uart进行输出。
二、实验原理介绍本次实验将使用已经预先生成完的Bitstream文件,该硬件比特中包含了5路GPIO(分别接在LED0、LED1、SW0、SW1和JC7)、Uart和4路PWM。
三、实验步奏(1)打开SDK,将工程目录选到ZYNQ_Workshop文件夹下,点击OK。
(2)选择file->Import->General->Existing Projects into Workspace,点击Next;将路径选择到ZYNQ_Workshop\Led.sdk,点击Finish。
(3)SDK工程被打开,包含了Lab1、Lab1_bsp和system_wrapper_hw_platform_0三个工程,其中Lab1为应用程序,Lab1_bsp为自动生成的Board Support Package,system_wrapper_hw_platform_0为导出到SDK的硬件工程。
(4)实验的应用程序主程序在Lab1->src下的helloworld.c中。
(5)程序相当简单,在Gpio初始化设置后,在while(1)循环中对LED进行控制后,读取ds18b20传感器数据,并通过串口输出温度值。
(6)下载硬件比特。
选择菜单栏的Xilinx Tools->Program FPGA选项。
在弹出的对话框中确认下载的硬件比特后,点击Program。
(7)等待完成后LD10会亮起,表示FPGA硬件工程已经被下载了。
下一步进行软件下载,先选择菜单栏Project->Build All(或者使用Ctrl+B快捷键),工程开始build。
(8)等待工程build完成后,右击Lab1工程,选择Run as->Launch on Hardware。
z-turn开发笔记
Z-turn开发笔记1、Zynq启动配置1.1 时钟要求器件启动时拥有了稳定的电压后,还必须保证PS_PORT_B引脚拉高前,PS_CLK已经有稳定的时钟输入,通常PS_CLK采用33.3Mhz和50MHz的时钟。
ZYBO:50MHzZ-turn: 33.3MH1.2复位要求PS_POR_B:这个复位保持PS在复位状态,直到所有PS的供电达到了所有的要求。
在PS上电之前,必须为低。
PS_POR_B由供电器件“Power-Good”信号提供。
PS_SRST_B:这个复位用于强制系统复位。
它能被连接或者拉高,当在PS供电斜坡阶段,该信号为高。
1.3模式引脚配置五个模式引脚,mode[4:0]用于表示启动源,用于JTAG模式和PLL旁路选择。
两个电压模式引脚vmode[1:0],用于表示复用I/O组的电压模式。
使用20K欧的上拉或者下拉电阻连接mode[4:0]和vmode[1:0]信号。
当ROM运行时,vmode信号用来设置各个MIO_PIN寄存器,为所有的MIO 引脚设置合适的LVCMOS18或者LVCMOS33 I/O标准。
当完成BootROM后,在需要的时候,FSBL可以将I/O的标准从LVCMOS修改为HSTL或者LVTTL。
Vmode[0]引脚用于设置第0组。
当PS_POR_B复位信号从低到高变化时,对mode和vmode信号采样三个PS_CLK时钟。
当在上电复位采样时,将采样的模式值保存到SLCR内的BOOT_MODE寄存器中。
vmode的值保存在GPIOB_DRVR_BIAS_CTRL。
模式引脚是MIO[6:2],vmode引脚是MIO[8:7],引脚使用如下:MIO[2]表示JTAG模式;MIO[5:3]选择启动模式;MIO[6]是能PLL;MIO[8:7]配置I/O组电压。
Boot Interface OptionsThe PS supports boot from Quad-SPI, NAND, and NOR devices. Boot devices do not impact system level dynamic power as the boot process only occurs once at device power up. Lower voltage 1.8V devices are of lower static power than higher 3.3V devices.启动选择:1.8V启动优于3.3V启动。
zynq存储方案

zynq存储方案Zynq存储方案是指使用Xilinx的Zynq系列芯片实现的一种存储解决方案。
Zynq系列芯片是一种将FPGA与ARM处理器相结合的器件,具备了可编程性和处理能力,适用于在嵌入式系统中实现各种功能。
本文将介绍Zynq存储方案的基本原理、应用场景以及实现步骤。
一、Zynq存储方案的基本原理Zynq存储方案的基本原理是利用Zynq系列芯片中的可编程逻辑部分实现存储控制器,将ARM处理器和存储设备(如SD卡、NAND闪存等)通过片内总线连接起来。
ARM处理器作为主控制器,负责与存储设备进行数据的读写操作。
可编程逻辑部分通过配置和控制ARM处理器与存储设备之间的数据通路和时序,实现存储方案的功能。
二、Zynq存储方案的应用场景Zynq存储方案适用于各种需要存储和读取数据的应用场景。
例如,智能摄像头可以使用Zynq存储方案将拍摄的照片和视频保存到SD卡中;机器人控制系统可以使用Zynq存储方案将传感器数据和控制指令保存到NAND闪存中;工业自动化系统可以使用Zynq存储方案将生产数据保存到外部硬盘中。
由于Zynq芯片具备强大的处理能力和可编程性,可以灵活适应各种应用需求。
三、Zynq存储方案的实现步骤以下是实现Zynq存储方案的基本步骤:1. 硬件设计:根据应用需求选择合适的存储设备(如SD卡、NAND闪存等),并将其连接到Zynq芯片的存储接口。
同时,根据存储设备的技术规格,设计相应的数据接口和时序控制电路。
2. 软件开发:使用Xilinx提供的软件开发工具(如Vivado和SDK)进行软件开发。
首先,配置可编程逻辑部分,生成bitstream文件并下载到Zynq芯片。
然后,开发ARM处理器的软件代码,实现与存储设备的通信和数据读写操作。
最后,将软件代码编译生成可执行文件,下载到ARM处理器中运行。
3. 系统调试:将Zynq芯片与存储设备及其他外设连接起来,通电后进行系统调试。
通过读写存储设备中的数据,检查系统是否正常工作。
zynq rgmii和mdio的用法
zynq rgmii和mdio的用法zynq rgmii和mdio的用法本文将详细讲解zynq rgmii和mdio的用法,涉及以下几个方面:1. 介绍zynq rgmiizynq rgmii是一种网络接口标准,全称为Reduced Gigabit Media Independent Interface。
它是一种用于以太网的物理层接口,用于连接以太网交换机和终端设备。
zynq mdiozynq mdio是一种管理数据输入/输出接口,全称为Management Data Input/Output。
它是一种用于管理网络设备的接口,主要用于进行网络设备的配置和监控。
2. 使用步骤配置rgmii接口要使用zynq rgmii接口,需要进行以下配置:•首先,确认硬件设备中的rgmii接口是否正常连接。
确保以太网交换机和终端设备正确连接到zynq芯片上的rgmii接口。
•然后,在软件层面上配置rgmii接口。
根据具体的开发环境,可以通过设备树或寄存器配置等方式进行配置。
使用mdio接口要使用zynq mdio接口,需要进行以下步骤:•首先,确定需要管理的网络设备是否支持mdio接口。
如果支持,可以连接到zynq芯片上的mdio接口。
•其次,在软件层面上配置mdio接口。
可以通过设备树或驱动程序等方式进行配置。
配置包括设置mdio时钟频率、选择mdio接口的模式(主模式/从模式)等。
3. 示例代码以下是一个使用zynq rgmii和mdio的示例代码:#include <linux/>#include <linux/>// 配置rgmii接口void configure_rgmii_interface(){// 硬件接口连接正常,在此处添加相关代码}// 使用mdio接口void use_mdio_interface(){struct phy_device *phydev;struct mii_bus *mdio_bus;// 创建mdio总线mdio_bus = mdiobus_alloc();if (!mdio_bus) {printk("Failed to allocate mdio bus\n"); return;}// 配置mdio总线mdio_bus->name = "zynq_mdio";mdio_bus->parent = NULL;// 注册mdio总线if (mdiobus_register(mdio_bus) < 0) {printk("Failed to register mdio bus\n"); mdiobus_free(mdio_bus);return;}// 检测并注册mdio设备phydev = phy_find_first(mdio_bus);while (phydev) {phy_connect_dev(phydev, NULL, NULL, PHY_INTERFAC E_MODE_RGMII);phydev->dev_flags |= PHY_IS_INTERNAL;phydev->interface = PHY_INTERFACE_MODE_RGMII;phydev->advertising = 0;// 在此处添加需要的mdio操作phydev = phy_find_next(phydev);}}通过以上示例代码,可以实现对zynq rgmii和mdio接口进行配置和使用。
zynq dma 例子

zynq dma 例子标题:Zynq DMA示例详解一、概述Zynq DMA(Direct Memory Access)是一种在Xilinx Zynq平台上使用的数据传输技术。
它可以在不经过CPU的干预下,实现高效的数据传输和处理。
本文将详细介绍Zynq DMA的原理、应用场景以及使用方法。
二、Zynq DMA的原理Zynq DMA利用硬件模块实现数据传输,减轻CPU的负担,提高系统的性能。
它通过配置DMA控制器和内存地址传输控制器,实现对数据的直接读写。
在数据传输过程中,DMA控制器负责管理数据的读写,而CPU则可以继续处理其他任务。
三、Zynq DMA的应用场景1. 实时数据采集:Zynq DMA可以实现高速数据采集,将采集的数据直接存储到内存中,无需CPU的干预,提高采集效率。
2. 高速数据传输:Zynq DMA可以在不占用CPU资源的情况下,实现高速数据传输,例如音视频数据的传输。
3. 数据处理加速:Zynq DMA可以将数据直接传输到专用加速器中进行处理,提高处理速度。
四、Zynq DMA的使用方法1. 配置DMA控制器:首先需要配置DMA控制器的寄存器,设置传输模式、传输方向、传输长度等参数。
2. 配置内存地址传输控制器:将待传输数据的内存地址和DMA控制器关联起来,以便进行数据读写操作。
3. 启动数据传输:通过设置DMA控制器的启动位,启动数据传输操作。
4. 等待传输完成:通过轮询DMA控制器的状态位,等待数据传输完成。
5. 处理传输结果:根据传输结果,进行相应的处理操作。
五、Zynq DMA示例代码以下是一个简单的Zynq DMA示例代码,用于实现从外设(如ADC)采集数据并存储到内存中:```c#include <stdio.h>#include <stdlib.h>#include <stdint.h>#define DMA_BASE_ADDR 0x80000000#define ADC_BASE_ADDR 0x90000000volatile uint32_t *dma_ctrl = (uint32_t *)(DMA_BASE_ADDR + 0x00); volatile uint32_t *dma_src_addr = (uint32_t *)(DMA_BASE_ADDR +0x04);volatile uint32_t *dma_dest_addr = (uint32_t *)(DMA_BASE_ADDR + 0x08);volatile uint32_t *dma_transfer_len = (uint32_t *)(DMA_BASE_ADDR + 0x0C);volatile uint32_t *adc_data = (uint32_t *)ADC_BASE_ADDR;void start_dma_transfer(uint32_t src_addr, uint32_t dest_addr, uint32_t transfer_len) {*dma_src_addr = src_addr;*dma_dest_addr = dest_addr;*dma_transfer_len = transfer_len;*dma_ctrl = 0x01; // 启动数据传输}int main() {uint32_t adc_data_buf[1024];start_dma_transfer((uint32_t)adc_data, (uint32_t)adc_data_buf, 1024);// 等待数据传输完成while ((*dma_ctrl) & 0x01) {continue;}// 数据处理操作for (int i = 0; i < 1024; i++) {printf("ADC Data: %d\n", adc_data_buf[i]);}return 0;}```六、总结通过Zynq DMA技术,我们可以实现高效的数据传输和处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ZYNQ的启动原理和配置
启动过程
设备配置包含用于初始化和配置ps和pl的所有方法及过程。
在软件控制下,ps内的DevC 提供用于初始化和配置ps和pl的手段和方法,在zynq中提供两个模块用于控制配置过程:BootROM,一个静态存储块器块,当上电复位和暖复位后,有Cortex-A9的CPU执行这个内置程序;
设备配置单元:用于控制JTAG调试访问和提供连接到AES、HMAC和PCAP模块的接口,用于实现对芯片内的pl的配置及数据的解密。
在ps的控制下,可以实现安全或非安全的配置所有ps和pl。
通过zynq提供的JTAG接口,用户可以在外部主机的控制下对zynq进行配置,zynq不支持最开始就配置pl的过程。
对zynq的配置过程至少包含两个阶段,但是通常要求3个阶段。
阶段0:该阶段也称为BootROM,该阶段控制初始设备的启动。
BootROM是上电复位或暖复位后,处理器所执行的用户不可修改的代码,该代码已经固化到zynq的BootROM中;阶段1:在该阶段,通常执行第一级启动引导程序。
但是,它也可以是任何用户控制的代码;
在该阶段,通常执行用户自己编写的软件程序,但是,也可以是第二级的启动引导程序,该阶段完全是在用户的控制下实现的。
zynq的BootROM
BootROM特性:
提供3种不同的方法,用于配置PS:两个主模式和一个从模式,即安全、加密的镜像、主模式;非安全的主模式;通过JTAG的非安全从模式;
支持4种不同的外部启动源:Quad-SPI Flash、NAND Flash、NOR Flash、SD;
支持使用AES-256和HMAC(SHA-256)的PS安全配置;
支持Soc调试安全性;
从NOR和QSPI芯片内执行配置过程。