模拟主轴刚性攻丝
FANUC系统刚性攻丝功能详解
FANUC系统刚性攻丝功能详解首先,刚性攻丝功能是指机器人在进行攻丝操作时,能够保持稳定的力和位置控制。
这意味着机器人可以根据既定的程序在工件表面上产生高质量的螺纹。
这种功能对于需要精确控制螺纹深度、螺距和螺纹形状的应用非常重要。
刚性攻丝功能的实现主要依赖于FANUC系统的硬件和软件设计。
FANUC系统使用高性能的力传感器和位置传感器来实时监测机器人与工件之间的力和位置信息。
这些传感器能够提供高分辨率和高精度的测量结果,从而保证机器人的稳定性和准确性。
在软件方面,FANUC系统提供了一套完整的攻丝控制算法。
这些算法对机器人的运动进行实时的力和位置调整,以实现精确的攻丝操作。
例如,在攻丝过程中,系统可以根据传感器信息实时调整机器人的速度和力度,以适应工件表面的不均匀性和材料特性。
此外,FANUC系统还提供了丰富的控制参数和设置选项,以满足不同应用的需求。
用户可以根据具体的攻丝要求进行调整,包括螺纹深度、起刀点位置、进给速度等等。
这些参数的灵活调整使得FANUC系统能够适应各种不同的攻丝操作,从而提高生产效率和质量。
最后,FANUC系统的刚性攻丝功能还具备一定的智能化特性。
系统可以通过学习和优化算法,自动适应不同材料和工件的攻丝过程。
它能够根据历史数据分析出最佳的攻丝参数和路径,从而提高攻丝的效率和质量。
总结起来,FANUC系统的刚性攻丝功能通过高性能的传感器、智能化的控制算法以及灵活的参数调整,实现了高质量和高效率的攻丝操作。
这种功能对于提高机器人的应用范围和工作效果具有重要意义,为用户创造了更多的机会和价值。
GSK983M刚性攻丝使用补充说明

GSK983M-S/ GSK983M-V铣床数控系统刚性攻丝功能 使用说明(使用手册补充部分)GSK983M-S/ GSK983M-V 铣床数控系统GSK983M 刚性攻丝功能使用说明(本文档版本:第1版 2007年6月27日)刚性攻丝功能 使用说明 (使用手册补充部分:2007-06-21第1版) 本使用手册补充部分适应于GSK983M-S/GSK983M-V铣床数控系统,是对GSK983M-S/GSK983M-V铣床数控系统的刚性攻丝功能的使用说明。
一、功能描述:在刚性攻丝方式中,用主轴电机控制攻丝过程,主轴电机的工作和伺服电机一样,由Z轴和主轴之间的插补来执行攻丝。
在刚性方式执行攻丝时,主轴每旋转一转沿攻丝轴产生一定的进给螺纹导程,即使在加减速期间这个操作也不变化。
刚性方式不用标准攻丝方式(G84/G74)中使用的浮动丝锥卡头,这样可得到较快和较精确的攻丝。
二、指令格式:G98/G99 G90 G184 X Y Z R Q F M3/M4 S___ G98:攻丝完成后返回到初始点 G99:攻丝完成后返回到R点 G184:攻丝循环开始 M3:右旋螺纹 M4:左旋螺纹 X Y :孔位坐标(可缺省)Z : 孔底的绝对位置值 R : R点的绝对位置值F : 螺距(MM)Q : 孔底暂停时间(s)S : 主轴转速共 7 页 第 1 页(图1)三、说明:沿X和Y轴定位后执行快速移动到R点,从R点到Z点执行攻丝。
当攻丝完成时,主轴停止并执行暂停,然后主轴以相反方向旋转,刀具退回到R 点,主轴停止。
然后,执行快速移动到初始位置。
当攻丝正在执行时,进给速度倍率和主轴倍率认为是100%。
指定G184为刚性攻丝循环指令。
指定G180为取消刚性攻丝循环指令。
螺纹导程:不管是在每分进给方式中或每转进给方式,螺纹导程都等于每转进给速度。
四、限制:1. 刚性攻丝不能改变攻丝轴。
2. 只能采用绝对指令和公制编程。
3. F指令的单位:0.01mm/rev ,小数点编程。
模拟主轴刚性攻丝功能的实现
模拟主轴刚性攻丝功能的实现
何红欣;项久鹏;王战勇
【期刊名称】《制造技术与机床》
【年(卷),期】2005(000)012
【摘要】刚性攻丝是数控机床应该具有的基本功能,一般通过串行主轴来实现.文章采用模拟主轴对实现刚性攻丝功能做了探究,并验证了该功能的可行性.
【总页数】3页(P54-56)
【作者】何红欣;项久鹏;王战勇
【作者单位】汉川机床有限责任公司,陕西,汉中,723003;北京超同步科技有限公司,北京,100083;汉川机床有限责任公司,陕西,汉中,723003
【正文语种】中文
【中图分类】TH12
【相关文献】
1.西门子802C配超同步主轴驱动器实现刚性攻螺纹功能 [J], 罗勇刚;陈浩
2.参数法在模拟主轴刚性攻丝故障诊断中的应用 [J], 张亚萍;李卫民
3.FANUC 0iD系统动力刀刚性攻丝功能的实现 [J], 王宝平;王鸿博
4.FANUC系统主轴特殊刚性攻丝实现方法 [J], 裴俊朋;韩丽伟
5.模拟主轴刚性攻丝的实验研究 [J], 张刚
因版权原因,仅展示原文概要,查看原文内容请购买。
FANUC设定参数实现刚性攻丝

FANUC设定参数实现刚性攻丝(大连机床集团有限责任公司黄贤鸿)1 两种攻丝方式的比较以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/ 反转指令, 然后再编人G84 /G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据F=丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住(惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以及被加工件的材质较软(铜或铝) 时, 螺纹精度将不能得到保证。
还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。
刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。
发那科术语解释
FANUC系统部分功能的技术术语及解释:1、控制轨迹数(Controlled Path)CNC控制的进给伺服轴(进给)的组数。
加工时每组形成一条刀具轨迹。
各组可单独运动,也可同时协调运动。
2、控制轴数(Controlled)CNC控制的进给伺服轴总数/每一轨迹。
3、联动控制轴数(Simultaneously Controlled Axes)每一轨迹同时插补的进给伺服轴数量。
4、PMC控制轴(Axis control by PMC)由PMC(可编程机床控制器)控制的进给伺服轴。
控制指令编在PMC的程序(梯形图)中,因此修改不便。
所以这种方法通常只用于移动量固定的进给轴控制。
5、Cf轴控制(Cf Axis Control)车床系统中,主轴的回转位置(转角)控制和其它进给轴相同,由进给伺服电动机实现。
该轴与其它进给轴联动进行插补,加工任意曲线。
6、Cs轮廓控制(Cf contouring control)(T系列)车床系统中,主轴的回转位置(转角)控制不是用进给伺服电动机,而由FANUC主轴电动机实现。
主轴的位置(角度)由装于主轴(不是主轴电动机)上的高分辨率编码器检测。
此时主轴是作为进给伺服轴工作,运动速度为:度/分。
并可与其它进给轴同时进行插补,加工出轮廓曲线。
7、回转轴控制(Rotary Axis Control)将进给轴设定为回转轴作角度位置控制。
回转一周的角度,可用参数设为任意值。
FANUC 系统通常只是基本轴以外的进给轴才能设为回转轴。
8、控制轴脱开(Controlled Axis Detach)指定某一进给伺服轴脱离CNC的控制而无系统报。
报通常用于转台控制。
机床不用转台时,执行该功能交转台电动机的插头拔下,卸掉转台。
9、伺服关断(Servo Off)用PMC信号将进给伺服轴的电源关断,使其脱离CNC的控制,用手可以自由移动。
但是CNC仍然实时地监视该轴的实际位置。
该功能可用于在CNC机床上用机械手轮控制工作台的移动,或工作台、转台被机械夹紧时以避免进给电动机发生过流。
刚性攻丝参数
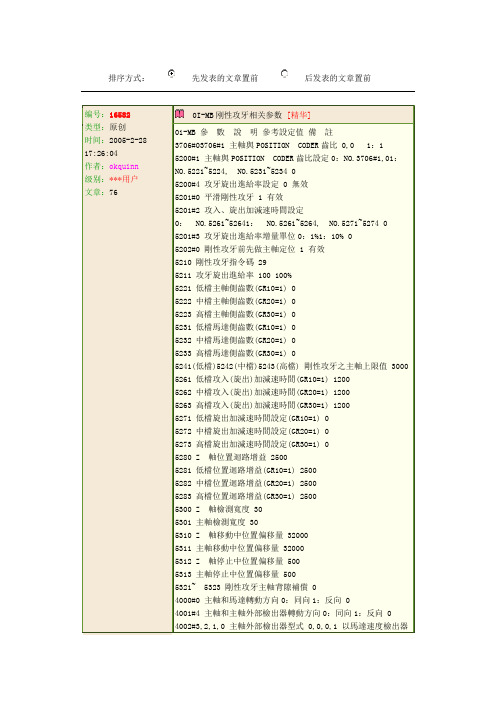
排序方式:先发表的文章置前后发表的文章置前 0I-MB参数号符号说明3#6,#7 PSG* 主轴与位置编码器的齿轮比64#6,#7 P2SG* 第二主轴与第二位置编码器的齿轮比13#5 ORCW 定向时,S模拟输出极性正/负13#6,#7 TCW,CWM S模拟输出的极性24#2 SCTO 不检测/检测主轴速度到达信号(G120#4 SAR)49#2 CHKSP SIND为1时,主轴速度漂移检测无效/有效65#1 CZRN 方式切换至Cs轮廓控制方式后,执行回零后的第一个G00指令执行定位/执行普通定位70#0,#! DAC* 对于D/A转换,模拟接口板未使用/使用71#0 ISRLPC 使用一个串行主轴时,位置编码器信号通过光缆接收/通过M27接口接收71#2 SRLMSP 多主轴控制中,第二主轴为模拟的/串行的71#3 SSMPC M27/第二主轴控制单元用作第二位置编码器接口71#4 SRL2SP 连接一个/两个串行主轴接口71#7 FSRSP 串主轴未使用/被使用行74#7 PLCREV 位置编码器的反馈信号代表绝对值/带方向的脉冲80#2,#3 MORCM* 对于第一,第二主轴电机,外部设定停止位置的主轴定向功能未使用/已使用381#7 IGNSIC 刀架2连接串行/模拟主轴397#0 SPLME 主轴速度偏移检测功能的允许比例为1% / 0.1%108 SPLOW 主轴恒定速度给定或主轴换档速度给定110 SCTTIM 检测主轴速度到达信号的延迟时间(G120#4 SAR)516 PSANGN 恒线速控制时的调整增益(S4/S5位数模拟主轴)531 SPALW 主轴速度偏移检测中确定是否达到主轴速度的允许比例532 SPLMT 主轴速度偏移检测中确定是否发出报警的主轴速度偏移率539 SPDLC 主轴速度偏移值540~543 GRMX1~4 对应于各档指令电压为10V时的主轴速度546 DRFT3 Cs轴伺服环中发生的漂移补偿值551 LOWSP (G96)恒线速控制中的最低速限制556 SCLMP 恒线速控制中的最高速限制564 SPWDTH 主轴速度漂移检测中不引起报警的允许漂移范围576 简易主轴同步控制方式中两主轴间的允许误差脉冲数580~583 SLPGM1~4 Cs控制方式中各档的主轴伺服环增益584 SLPGIN 主轴环增益585 SRPDFL 主轴快速进给时的F0倍率586 SZRNFL 主轴定向时的FL速度587 MORT 指定主轴定向的M代码588 MRELS 取消主轴定向的M代码712 SPTIME 启动主轴速度漂移检测的时间6780~6783 Cs轮廓控制方式中伺服轴的位置环增益6784~6787 (X)Cs轮廓控制方式中各档的位置环增益6788~6791 (Y)Cs轮廓控制方式中各档的位置环增益6792~6795 (Z)Cs轮廓控制方式中各档的位置环增益6796~6799 (4)Cs轮廓控制方式中各档的位置环增益6501#7 执行主轴自动参数设定6633 主轴电机ID代码6501#2 使用主轴位置编码器6503#0 使用内装主轴编码器参数号符号说明60#0 DADRDP 诊断画面中是否显示地址X,Y,G,F,R,D。
FANUC 钢性攻丝
关于FANUC—Oi加工中心钢性攻丝肇庆汇隆(2000转以上)高速攻丝刚开始丛200转速以下可以攻丝,要一下提到2000转来攻丝。
一:钢性攻丝它的原理:P=F/SP:螺距F:z轴的进给S:主轴的转速丛以上的工式可以看出,在攻丝时P要恒定,关键是F和S的比一定要保持不变才能达到攻丝的要求。
所以也要z轴和主轴保持同步。
分析一下:只要主轴和z 轴都同时到达所要求的转速和进给速度的话,攻丝就没什么问题。
所以我们就着重围绕着他的参数来修改。
我们再来了解一下关于它的参数:NIZ=0 时不进行攻丝平滑处理NIZ= 1时进行攻丝平滑处理* TDR:钢性攻丝中的切削时间常数选择。
TDR =0时进退刀的时间常数用一样的参数(NO.5261~NO.5264)机床最终修改为TDR =0TDR=1时用进退刀时的时间常数用不一样的参数进刀时用(NO.5261~ NO.5264)退刀时用(NO.5271~ NO.5274)DGN=0时诊断453显示主轴和z轴的最大误差=1时诊断 450 显示主轴和z轴的同步误差NO.5310NO.5310=32767 :攻丝时位置偏差极限值。
在攻丝前放到最大。
有可能出现ALM 200NO.5261~~NO.5263:为进退刀加减速时间常数。
(在NO。
5201#2=0时)刚开始的参数都=100 (机床的出厂设置)NO.5261~~NO.5263=100:在这它等于100时没有试过,但它的出厂是按200转/分钟转速调攻丝的。
(会因转速过高而乱牙)它的最终调节为300插曲:FANUC公司来人用PC机跟踪同步脉冲调整它为NO.5261~~NO.5263=3000,所出现的问题是:例: 用程序1200转/分钟的主轴转速,攻M4*20的牙,主轴转速没有到1000就又开始减速了,攻丝的时间就变长了很多。
不过它的同步误差只有一两个脉冲。
调机一:开始马师傅就把NO.5300 z轴到位宽度 NO.5301主轴到位宽度都调到了20NO.5300和NO.5301它是一个精度的参数。
FANUC系统数控加工中心刚性攻丝时的参数设定
在 FANUC 0i等数控 系统 中对刚性攻 丝 的处理 设置 了 3 种指令 模式 ,即 :①在 G84(攻丝 循环 )之前 由 M29 S X××X 指令 ;② 在 G84同一段 中 ,由 M29 S X×××指令 ;③不 用 M 代码 ,而直接 由 G84来指令 。但 不论 是哪种方式进行 刚性攻 丝 ,都必须具备最基本 的 3个 条件 :
(3)合 羽{凸 数。根据 主轴不 同传动结构 ,涉及刚性攻
【作者 简 介 】丁海萍(1979一),男,研究生,讲师,研究方向:机械制造及其自动化。 41
丝的参数是很多的。要合理设定这些参数 ,了解参 数的意义是 必要 的 ,并要抓住要害才能达到事半功倍 的效果 。本 文着重说 明各种参数 的具体含义 。
2010年 9月 第 9期 (总第 142期 )
广 西 轻 工 业 GUANGxIJ0uRNAL oF LIGHT lNDusTRY
机 械 与 电 气
F A N U C 系统 数 控加 工 中心 刚性 攻 丝 时的参 数设 定
丁 海 萍 ,杨 晶
(南通 职 业大学数 控 中心 ,江 苏 南通 226007)
【中图分类号 】TG659 【文献标识码 】 B
【文章编号 】 1003—2673(2010)09—41—02
1 引言 刚性攻丝功能 以高速高效 高精度 加工螺纹 而被越 来越多
的机 床用 户所青睐 ,因此调试好此功能 ,使其达 到高速高精度 的性 能 ,以满足用户广泛的 ̄JnY-需求是很有 必要 的,对于精度 要求高的深孔 ,应通过选用合适 的攻 丝方法和合理设置数控系 统参数等手段来实现。目前 刚性攻丝 已经成 为加工 中心不可缺 少 的一项主要功能。
常用机床参数功能设定说明整理

常用机床参数功能设定说明整理FANUC2016.08.151/47常用参数分类罗列以下几种u有关RS232数据传输以及存储卡DNC加工参数u有关刚性攻丝常用参数u与同步轴控制相关参数u与撞块回参考点以及光栅尺回参考点相关参数u与FSSB连接相关参数u与圆弧加工相关参数u CMR扩大10倍相关参数u模具切削系列相关参数2/47u有关RS232数据传输以及存储卡DNC加工参数将I/O CHANNEL (对应参数N20)设定为0。
波特率N103 N113 N123设定为12。
需保证RS232接口焊线正确,如右图。
3/47存储卡DNC加工这样设定:首先将I/O CHANNEL 设定为4(按上述方法设定),参数N138#7=1。
将加工程序拷贝到存储卡里(可以一次拷贝多个程序)。
选择[RMT]方式,程序画面,按右软件键[►],找[CARD],显示存储卡里面的文件列表。
选择需要加工的程序序号,按[DNC-CD],然后再按[DNC-ST](如果找不到[DNC-CD],需要按几次软件键[►],直到找到该软键为止)。
按机床操作面板上的循环启动按钮,就可以执行DNC加工了。
4/47u有关刚性攻丝常用参数普通刚性攻丝:针对刚性攻丝过程经常出现诊断号N453超差,现整理相关参数如下:N5310-N5312攻丝时位置偏差极限值,推荐值10000,超过设定值会有ALM740报警N5241-5244攻丝主轴最高转速,推荐值100~2000,设定太小会有ALM200报警。
N5280攻丝时主轴和Z轴公共位置环增益需要和主轴位置环增益N4065-N4058设定一致,推荐值1000~3000,但不可设定太大,太大会有异响。
调整攻丝时加减速时间常数:N5261-N5264进刀时加减速时间常数。
N5271-N5274退刀时加减速时间常数。
N5201#2=0进刀和退刀都使用N5261-N5264。
#2=1进刀和退刀分别用各自时间常数。
时间常数不可设定太小,否则主轴和攻丝轴来不及加速到设定速度。
刚性攻丝

4) 在M29指令和固定循环的G指令之间不能有S指令或任何坐标运动指令。
5) 不能在攻丝循环模态下指令M29。
6) 不能在取消刚性攻丝模态后的第一个程序段中执行S指令。
7) 不要在试运行状态下执行刚性攻丝指令。
1
刚性攻丝指令(M29)
指令M29Sx x x x;机床进入刚性攻丝模态,在刚性攻丝模态下,Z轴的进给和主轴的转速。M29指令的具体使用方法可参见“8.1.14 刚性攻丝方式”的说明。
8.1.14 刚性攻丝方式
在攻丝循环G84或反攻丝循环G74的前一程序段指令M29Sx x x x;则机床进入刚性攻丝模态。NC执行到该指令时,主轴停止,然后主轴正转指示灯亮,表示进入刚性攻丝模态,其后的G74或G84循环被称为刚性攻丝循环,由于刚性攻丝循环中,主轴转速和Z轴的进给严格成比例同步,因此可以使用刚性夹持的丝锥进行螺纹孔的加工,并且还可以提高螺纹孔的加工速度,提高加工效率。
使用G80和01组G代码都可以解除刚性攻丝模态,另外复位操作也可以解除刚性攻丝模态。
使用刚性攻丝循环需注意以下事项:
1) G74或G84中指令的F值与M29程序段中指令的S值的比值(F/S)即为螺纹孔的螺距值。
2) Sx x x x必须小于0617号参数指定的值,否则执行固定循环指令时出现编程报警。
法拿克攻丝实例

法拿克攻丝实例FANUC系统设定参数实现刚性攻丝:主轴,刚性。
两种攻丝方式的比较<BR>以前的加工中心为了攻丝,一般都是根据所选用的丝锥和工艺要求,在加工程序中编入一个主轴转速和正反转指令,然后再编人G84G74固定循环,在固定循环中给出有关的数据,其中Z轴的进给速度是根据F=丝锥螺距×主轴转速得出,这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的,但是主轴的转动角度是不受控的,而且主轴的角度位置与Z轴的进给没有任何同步关系,仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程,主轴要加速-制动-加速-制动,再加上在切削过程中由于工件材质的不均匀,主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z轴,它的进给速度和主轴也是相似的,速度不会恒定,所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时,必须配用带有弹簧伸缩装置的夹头,用它来补偿Z轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程,就会明显地看到,当攻丝到底,Z轴停止了而主轴没有立即停住(惯量),攻丝弹簧夹头被压缩一段距离,而当Z轴反向进给时,主轴正在加速,弹簧夹头被拉伸,这种补偿弥补了控制方式不足造成的缺陷,完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求,但对于螺纹精度要求较高,6H或以上的螺纹以及被加工件的材质较软(铜或铝)时,螺纹精度将不能得到保证。
还有一点要注意的是,当攻丝时主轴转速越高,Z轴进给与螺距累积量之间的误差就越大,弹簧夹头的伸缩范围也必须足够大,由于夹头机械结构的限制,用这种方式攻丝时,主轴转速只能限制在600r/min以下。
刚性攻丝就是针对上述方式的不足而提出的,它在主轴上加装了位置编码器,把主轴旋转的角度位置反馈给技控系统形成位置闭环,同时与Z轴进给建立同步关系,这样就严格保证了主轴旋转角度和Z轴进给尺寸的线生比例关系。
FANUC系统刚性攻丝问题

(图一)刚性攻丝的实验参数,S=800,F=800,传动比为4:1。
SVGuide选择“XTYT”观测页面,主轴选择“SPEED”观测项目,攻丝轴选择“SYNC”观测项目,采样时间1ms,采样数据点8000~10000该图的左面有个小的凸台,这其实是主轴从速度环变为位置环时,主轴先执行了回零动作。
可以通过NO5202#0=0关闭这个回零的动作。
这个图形表明刚性攻丝的性能仍然不行,因为主轴转速没有达到指令转速,当S=800时,主轴电机转速应该是3200,很显然,图形的红色曲线表明主轴电机的转速大约2500左右,表明电机仍然在加速过程中。
需要减小加减速时间常数NO5241~5244,原值为2400ms,改为800ms后,得到(图二)的曲线。
(图二)该图形表明,已经取消了主轴回零这个动作,并且在刚性攻丝过程中,主轴电机转速已经达到3200RPM,主轴以S=800旋转,同时,主轴和攻丝轴Z轴的同步误差小于50个同步脉冲。
(图三)这是在机床高速档进行的刚性攻丝实验,主轴指令转速1500RPM,高速档传动比1:1,很显然主轴电机没有达到指令转速,修改加减速时间后,同步误差脉冲猛增(该图未保留),所以该机床高速档不宜进行刚性攻丝。
(图4)加大了主轴速度环比例增益NO4044,NO4045,以及积分增益4052,NO4053后,它们的初始化值为10,现在改为15,同步误差脉冲有降低。
一点补充,NO5280为攻丝轴Z轴的位置环增益,当NO5280的值不为零时,NO5281~5284无效,此时N05280要和主轴各档的位置环增益相同,即NO4065~4068每个值相等,与NO5280的值相同。
当NO5280为零时,NO5281~5284的值生效,并与NO4065~4068的值对应相等。
提高NO5280~5281以及NO4065~4068的值,可以提高刚性攻丝的精度。
在诊断参数DGN452的值不为零时,需要检查NO5280,NO5281~NO5284的值是否与NO4065~NO4068相等或者对应相等。
FANUC0iMate数控系统主轴驱动的连接
FANUC0iMate数控系统主轴驱动的连接FANUC 0i Mate系统主轴操纵可分为主轴串行输出/主轴模拟输出(Spindle serial output/Spindle analog output)。
用模拟量操纵的主轴驱动单元(如变频器)和电动机称为模拟主轴,主轴模拟输出接口只能操纵一个模拟主轴。
按串行方式传送数据(CNC给主轴电动机的指令)的接口称为串行输出接口;主轴串行输出接口能够操纵两个串行主轴,必须使用FANUC的主轴驱动单元和电动机。
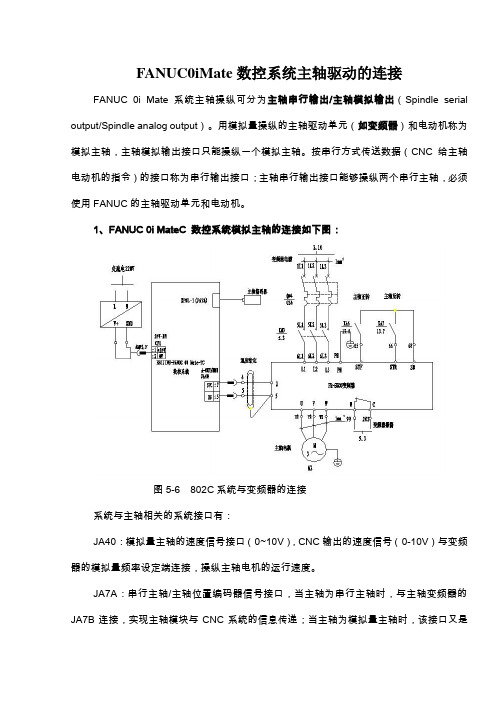
1、FANUC 0i MateC 数控系统模拟主轴的连接如下图:图5-6 802C系统与变频器的连接系统与主轴相关的系统接口有:JA40:模拟量主轴的速度信号接口(0~10V),CNC输出的速度信号(0-10V)与变频器的模拟量频率设定端连接,操纵主轴电机的运行速度。
JA7A:串行主轴/主轴位置编码器信号接口,当主轴为串行主轴时,与主轴变频器的JA7B连接,实现主轴模块与CNC系统的信息传递;当主轴为模拟量主轴时,该接口又是主轴位置编码的主轴位置反馈接口。
2、FANUC Oi Mate主轴相关参数表5.7 FANUC Oi Mate主轴相关参数3743 第三挡主轴最高速度O3744 第四挡主轴最高速度O3751 第一至第二挡的切换速度3752 第二至第三挡的切换速度3771 G96的最低主轴速度O3772 最高主轴速度O4019/7 主轴电机初始化O4133 主轴电机代码O1)FANUC 0i的模拟主轴设置和siemens802s/c的模拟主轴设置差不多类似,也能够分为单极性主轴和双极性主轴。
单/双极性主轴的设置第一通过CNC主轴参数3706#6、#7设置极性。
TCW、CWM为主轴速度输出时电压极性。
其次,通过变频器参数选择频率操纵输入信号的类型,以FUJI FRENIC-Multi为例,设置F01为1。
F01,C30 分别是频率设定1,频率设定2选择频率设定的设定方法。
FANUC系统串行主轴和模拟主轴在数控机床的应用
I . 串行 主轴 和模 拟主 轴的 Байду номын сангаас理
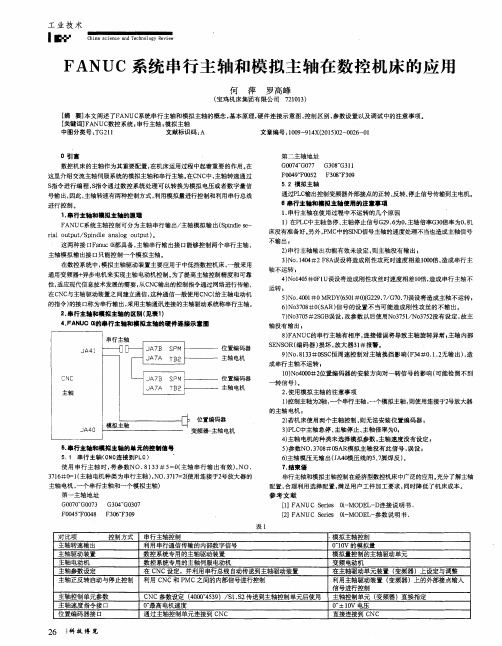
F ANUC 系统 主轴控 制 可分为 主轴 串行 输 出/ 主轴模 拟输 出 ( S p i n d l e s e -
[ 摘 要] 本文阐述TF A NUC 系统串行主轴和模拟主轴的概念 , 基本原理, 硬件连接示意图, 控制 区别, 参数设置以及调试中的注意事项。 [ 关键 词] F ANUC 数控 系统 , 串行 主轴 , 模 拟主 轴 中图分 类号 : T G2 1 1 文 献标 识码 : A 文章 编号 : 1 0 0 9 — 9 1 4 X( 2 0 1 5 ) 0 2 — 0 0 2 6 一 O 1
6 ) No 3 7 0 8 #0 ( S AR) 信 号 的设 置 不 当可 能造 成 刚性 攻丝 的 不 输出 。 7 ) N o 3 7 0 5 #2 S G B 误设 , 改参 数 以后使 用No 3 7 5 1 / No 3 7 5 2 没 有设 定 , 故 主
4 . F A N U C 0 i 的串 行 主轴和 模 拟主 轴 的硬 件连 接示 意 圈
机
码器
一
1 0 ) N o 4 0 0 0 #2 位置编码器的安装方向对一转信号的影响( 可能检测不到
转信 号 ) 。
2 . 使 用模 拟主 轴的 注意 事项
机
1 ) 控制主 轴为2 轴, 一个 串行 主轴 , 一个模 拟主轴 , 则使 用连接 于2 号放 大器
的主轴 电机 ,
2 ) 若机 床使 用 两个 主轴控 制 , 则 无法 安装 位置 编码 器 3 ) P L C 中主轴 急停 、 主轴 停止 、 主轴倍 率 为0 。 4 ) 主轴 电机 的 种类未 选择 模 拟参数 , 主轴 速度 没有 设定 , 5 . 串 行主 轴和 模拟 主 轴的单 元 的控 棚信 号
M29刚性攻丝指令

M29刚性攻丝指令
M29指令代码介绍:
在刚性模式下以与伺服电机相同的方式控制主轴电机,可实现高速攻丝。
M29代码必须放在任何攻丝循环(如G84或G88)之前,才能启用刚性攻丝模式。
可以通过应用以下任何一种方法来指定刚性模式
需要在攻丝块之前指定M29 S****
M29代码格式:
M29 S****
注意:M29指令最常见的M代码用于启用刚性攻丝模式,但也有一些数控系统不同的使用,这个指令不是通用指令,当我们遇到系统无法识别这种情况时,可以查阅数控机床的说明书,找到刚性攻丝指令的使用。
M29编程实例:
1、加工参数:
攻丝轴进给速度:1000 mm/min
主轴转速:1000min-1
螺杆导程:1.0毫米
2、每分钟进给编程
G98;每分钟进给指令
G00X100.0;定位
M29S1000;指定刚性模式的指令
G84Z-100.0R-20.0F1000;刚性攻丝
3、每转进给编程
G99;每转进给指令
G00X100.0;定位
M29S1000;刚性模式指定指令
G84Z-100.0R-20.0F1.0;刚性攻丝
每日编辑不易,若你还满意,可以点右下角的“在看”支持小编,或放到圈子里,感激不尽。
刚性攻丝
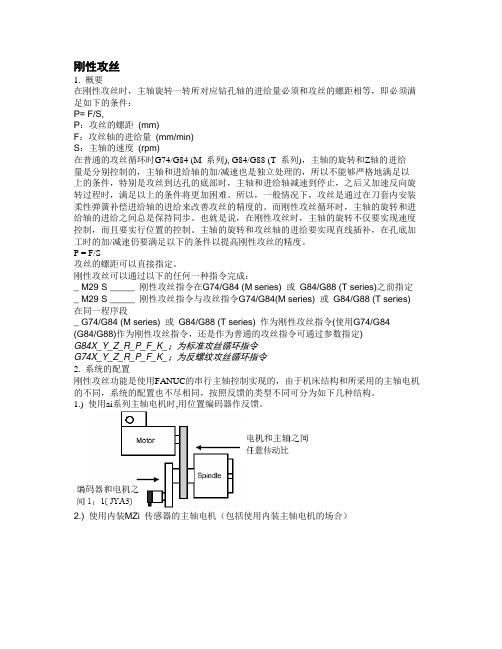
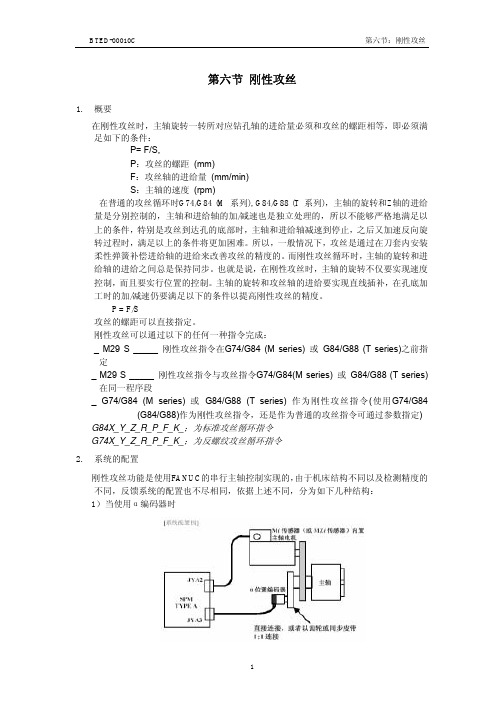
刚性攻丝1. 概要在刚性攻丝时,主轴旋转一转所对应钻孔轴的进给量必须和攻丝的螺距相等,即必须满足如下的条件:P= F/S,P:攻丝的螺距(mm)F:攻丝轴的进给量(mm/min)S:主轴的速度(rpm)在普通的攻丝循环时G74/G84 (M 系列), G84/G88 (T 系列),主轴的旋转和Z轴的进给量是分别控制的,主轴和进给轴的加/减速也是独立处理的,所以不能够严格地满足以上的条件,特别是攻丝到达孔的底部时,主轴和进给轴减速到停止,之后又加速反向旋转过程时,满足以上的条件将更加困难。
所以,一般情况下,攻丝是通过在刀套内安装柔性弹簧补偿进给轴的进给来改善攻丝的精度的。
而刚性攻丝循环时,主轴的旋转和进给轴的进给之间总是保持同步。
也就是说,在刚性攻丝时,主轴的旋转不仅要实现速度控制,而且要实行位置的控制。
主轴的旋转和攻丝轴的进给要实现直线插补,在孔底加工时的加/减速仍要满足以下的条件以提高刚性攻丝的精度。
P = F/S攻丝的螺距可以直接指定。
刚性攻丝可以通过以下的任何一种指令完成:_ M29 S _____ 刚性攻丝指令在G74/G84 (M series) 或G84/G88 (T series)之前指定_ M29 S _____ 刚性攻丝指令与攻丝指令G74/G84(M series) 或G84/G88 (T series) 在同一程序段_ G74/G84 (M series) 或G84/G88 (T series) 作为刚性攻丝指令(使用G74/G84(G84/G88)作为刚性攻丝指令,还是作为普通的攻丝指令可通过参数指定)G84X_Y_Z_R_P_F_K_;为标准攻丝循环指令G74X_Y_Z_R_P_F_K_;为反螺纹攻丝循环指令2. 系统的配置刚性攻丝功能是使用FANUC的串行主轴控制实现的,由于机床结构和所采用的主轴电机的不同,系统的配置也不尽相同,按照反馈的类型不同可分为如下几种结构。
第六节 主轴刚性攻丝(新)
2. 系统的配置
刚性攻丝功能是使用FANUC的串行主轴控制实现的,由于机床结构不同以及检测精度的 不同,反馈系统的配置也不尽相同,依据上述不同,分为如下几种结构: 1)当使用α编码器时
档)
5324
刚性攻丝时,主轴的反向间隙(T 只有
5321)
3707#0 P21 主轴和编码器之间的齿轮比
○
3707#1 P22
4000#0 ROTA1 主轴和主轴电机之间的安装方向
○
4000#2 POSC 主轴和位置编码器之间的方向
○
1
4002#1 POSC 位置编码器是否使用 2
○
4003#7, PCPL2
刚性攻丝时,攻丝轴运动中的位置偏差极 ○ 限值
5311 5312
刚性攻丝时,主轴在运动中的位置偏差极 ○ 限值 刚性攻丝时,攻丝轴停止时的位置偏差极 ○ 限值
5313
刚性攻丝时,主轴在停止时的位置偏差极 ○
限值
5314
刚性攻丝时,向间隙(一档-四
5321-
☆ : 自动设定 ★: 根据不同的条件设定
7. 刚性攻丝的诊断号: 当参数 5204#0(DGN)=1,显示下列诊断: 452:主轴和攻丝轴(Z)的瞬时误差( %) 453:最大值(保存,直到下一个循环) 当参数 5204#0(DGN)=0,观察下列诊断: 450:主轴和攻丝轴(Z)的瞬时误差(检测单位)
413 740
741 742
显示内容
非法 S 代码指令
无进给速度 位置 LSI 溢出 程序未指定刚性攻 丝方式 轴的指令非法
K2000系列攻丝指令
K2000系列攻丝使用说明⏹车床部分说明:●车床刚性攻丝软件:K2000T4/T8_A04PLC版本为:K2000T_STD_1.0G93模拟量攻丝:K5.7(G93S_K ):第一主轴G93攻丝功能是否有效1:有效0:无效指令G93指令时,主轴进入模拟量攻丝状态。
输出攻丝信号,通知主轴驱动器执行刚性攻丝操作。
执行完G93指令时,主轴退出模拟量攻丝状态。
输出信号停止输出,恢复原档位及主轴转速。
当攻丝时,默认为低档,输出低档信号。
攻丝时的主轴转速相关参数值设定在D80~D103中。
复位和急停退出G93攻丝状态。
注:G93攻丝时,取消M28/M29代码指令。
G84/ T: G84.5/M:G74刚性攻丝:1)G84为右旋转攻丝。
可以实现车床的端面中心攻丝,端面非中心攻丝,侧面攻丝功能。
2)3)上电和执行M03/M04/M05/M19/M60/M61 时,切换到第一主轴。
正确编程为:M03 S100;G84 IP_R_Z(W)_F_;(此处不可写入D,或D≠1,2)进行第一主轴G84攻丝时,先进行主轴定向(当M19S_K=0时,不进行定向),定向完成后,才可以进行攻丝。
4)如果当前为第二主轴,执行G84指令时,依据D值判断是端面非中心攻丝还是侧面攻丝。
攻丝轴为第二主轴。
执行M13/M14/M15时,切换到第二主轴。
端面非中心攻丝正确编程为:M13 S100;G84 IP_R_Z(W)_F_;(此处不可写入D,或D≠1,2)侧面攻丝正确编程为:M13 S100;G84 IP_R_X(U)_D1_F_;通常在进行端面非中心攻丝和侧面攻丝时,都要对主轴进行夹紧。
可使用M38/M39代码完成。
5)T: G84.5/M:G74为左旋攻丝,功能和实现和G84相同。
6)在进行攻丝时,通常需要设置的参数如下:NC参数:P412-3=1/2(第二主轴为旋转轴)在使用第二主轴攻丝功能时必需设置。
P2700.3=1(UG120)必需设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-7-
相关信号处理 相关信号处理
三、相关信号处理
刚性攻丝 译码信号 主轴零速信号I3
给系统刚性攻丝信号 给变频器刚性攻丝使能I4 选择第二档主轴转速
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-8-
相关信号处理 相关信号处理
1、系统模拟量的输出(JA40 口)
双极性接线方式 此接线方式为双极性方式。数控系统采用双极性(-10V~+10V)模 拟量输出,转速由模拟量的值决定,转向由模拟量极性决定。( 3706#7=1, 3706#6=0: M03 为正,M04 为负 )
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇ -5-
三、相关信号处理
给主轴使能I0
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-9-
参数设置 参数设置
四、参数设置
1、测量调整主轴模拟输出的增益数据和偏置电压的补偿量 (1) 执行S0;使用万用表测量JA40端口的5 ,7 脚,查看是否为0V,如 有偏差修改NO.3731=-8191*偏置电压/12. 5 (2) 执行Smax ;使用万用表测量JA40端口的5 ,7 脚,查看是否为 10V ,如有偏差修改NO.3730=10*1000/测量电压 本例中最终设定NO.3730=1000,NO.3731=100.
硬件连接介绍 硬件连接介绍
二、硬件连接
2、主轴位置编码器
JA41口主轴位置编码器反馈接线
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-6-
硬件连接介绍 硬件连接介绍
Байду номын сангаас二、硬件连接
3、变频器刚性攻丝信号I4、主轴零速信号I3 、主轴使能信号 I0 。使用模拟量作为速度给定时,当I4输入信号有效,主轴即进入 刚性攻丝状态。
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
- 14 -
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇ -2-
模拟主轴刚性攻丝调试一例 模拟主轴刚性攻丝调试一例 一、机床主要配置
• 系统配置: FANUC 0i-mate-MD βiSV40×3 +βis 22/2000×3
Z
X Y
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇ - 12 -
参数设置 参数设置
四、参数设置
3、变频器参数
功能码 Cn01 Cn02 Cn03 Cn20 Cn21 Cn22 名称 模拟量零点正向偏移 模拟量零点负向偏移 模拟量增益 刚性攻丝最高转速 刚性攻丝时的零漂 刚性攻丝时的加速度 设定范围 0-100 1-1500 0-3000 0-100 0-30000 设定值 0 0 1000 1000 0 5000 与3742一致
模拟主轴刚性攻丝调试一例 模拟主轴刚性攻丝调试一例
概要 硬件连接介绍 相关信号处理 参数设置 调试注意点
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-1-
概要 概要
首先,系统应处于刚性攻丝模式,即G61.0=1,使系统JA40口 发出的主轴旋转电压与攻丝轴的运动具有插补关系;并能根据 主轴位置编码器的反馈精确调节输出电压。 其次,变频器进入其自定义的刚性攻丝模式。进入刚性攻丝状 态后,变频器将自动调节控制的相关参数,以适应主轴的快速 响应和控制精度。 为了更进一步提高攻丝时模拟电压的精度,利用FANUC系统的T 型换档功能(3706#4=1),普通铣削时使用P3741中设置的第一 档速度,最高8000转;刚性攻丝时使用P3742中设置的第二档 速度,最高1000转,通过G28.1切换档位,这样改变了模拟电压 的曲线,进一步减小攻丝误差。
-3-
模拟主轴刚性攻丝调试一例 模拟主轴刚性攻丝调试一例 一、机床主要配置
• 主轴 变频器: CTB4011GS 主轴电机:CTB-4711P, 内置1024线TTL编码器 主轴与电机1:1连接
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-4-
硬件连接介绍 硬件连接介绍
二、硬件连接
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
- 11 -
参数设置 参数设置
四、参数设置
5291-5294为刚性攻丝中主轴各 档位的环路增益乘数(GC),其 初值可通过下式求出: 部分参数列表
实际中需观察诊断452、453,调 整5280、5291-5294等相关参数 的数值,使453中的值在10以下。
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
- 13 -
调试注意点 调试注意点
五、调试注意点
1、使用变频器的参数监控,检查系统输出给变频器的信号状 态,协助分析问题 。 2、指令刚性攻丝指令,主轴迅速旋转(正反向都有),随后出 现SP742报警:刚性攻丝报警,LSI溢出。 经分析可能是编码器反馈信号的极性有误造成的,因此将 CTB变频器提供给JA41口的A与B、*A与*B反馈信号进行了互 换,成功消除报警。 3、参考文献 何红欣等.《模拟主轴刚性攻丝功能的实现》
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
- 10 -
参数设置 参数设置
四、参数设置
2、系统侧与刚性攻丝相关的部分 参数 5300-5301为到位宽度,一般 设置相同值,值过小可能会使攻丝 轴或主轴无法到位,一直等待;值 过大精度变差。本例设定为40. 5310-5313的值过小则会出现 SP740或SP741报警。 部分参数列表