机器人运动学雅克比矩阵第8讲机器人的微分运动与速度
第4章 微分运动和雅可比矩阵

2013年7月15日
南京航空航天大学机械电子工程系
10
运动学逆问题
封闭解 1 q1 (nx , n y , nz , , px , p y , pz ) 2 q2 (nx , n y , nz , , px , p y , pz ) q (n , n , n , , p , p , p ) 3 x y z x y z 3 4 q4 (nx , n y , nz , , px , p y , pz ) q (n , n , n , , p , p , p ) 5 x y z x y z 5 6 q6 (nx , n y , nz , , px , p y , pz )
c c s c s 0 c s s s c s s s c c c s 0 c s c s s s s c c s c c 0 0 r11 r12 0 r21 r22 0 r31 r32 1 0 0 r13 0 r23 0 r33 0 0 1
0 nx 0 ny 0 nz 1 0
ox oy oz 0
ax ay az 0
px t111 t112 t113 p y t121 t122 t123 pz t131 t132 t133 1 0 0 0
m113 m123 m133 0
c4 0 3 4T s4 0 s4 0 c4 0
0 0 1 0
0 0 0 1
c2 0 1 2T s2 0
s2 0 c2 0
0 0 1 d2 0 0 0 1
c3 s 2 3 3T 0 0
现在绝大多数的机械手,都满足上面的充 分条件之一,所以封闭式逆解都存在。
机器人运动学雅可比矩阵

05 雅可比矩阵的优化与改进
雅可比矩阵的稳定性分析
稳定性分析的重要性
在机器人运动控制中,雅可比矩阵的稳定性对机器人的运动性能 和动态响应具有重要影响。
稳定性判据
通过分析雅可比矩阵的特征值和特征向量,可以确定机器人的运动 稳定性,并为其运动控制提供依据。
通常使用齐次变换矩阵来表示机器人的位姿,该矩阵包含 了平移和旋转信息,能够完整地描述机器人在空间中的位 置和方向。
坐标系与变换
01
坐标系是用来描述物体在空间中位置和姿态的参照框架。
02
在机器人学中,通常使用固连于机器人基座的坐标系作为全局 参考坐标系,以及固连于机器人末端执行器的坐标系作为局部
参考坐标系。
THANKS FOR WATCHING
感谢您的观看
雅可比矩阵的物理意义
雅可比矩阵描述了机械臂末端执行器 的位置和姿态随关节变量变化的规律, 是机械臂运动学分析中的重要概念。
通过雅可比矩阵,可以分析机械臂的 可达工作空间、奇异性、运动速度和 加速度等运动学性能。
雅可比矩阵的计算方法
雅可比矩阵可以通过正向运动学和逆 向运动学两种方法计算得到。
在计算雅可比矩阵时,需要使用到线 性代数、微分方程等数学工具。
正向运动学是根据关节变量求解末端 执行器在参考坐标系中的位置和姿态; 逆向运动学是根据末端执行器的位置 和姿态求解关节变量。
04 雅可比矩阵在机器人运动 学中的应用
机器人的关节与连杆
关节
机器人的每个关节都有一个自由 度,决定了机器人的运动方式。 常见的关节类型包括旋转关节和 移动关节。
连杆
机器人运动学雅可比矩阵

机器人的雅可比矩阵
微分运动与速度
1、
微分运动指机构的微小运动,可用来推导不 同部件之间的速度关系。 机器人每个关节坐标系的微分运动,导致机 器人手部坐标系的微分运动,包括微分平移与微 分旋转运动。将讨论指尖运动速度与各关节运动 速度的关系。 前面介绍过机器人运动学正问题
r f ( )
一般情况:
nm6
r f ( )
对位置方程进行求微分得:
dr d J J r dt dt
两边乘以dt,可得到微小位移之间的关系式
dr Jd
J 表示了手爪的速度与关节速度之间关系, 称之为雅克比矩阵。
f1 1 f J T f m 1
ze
z0
P e
xe
Oe
ye
O0
x0
y0
指尖的平移速度为: dPe df dq dq v JL J Lq dt dq dt dt J L : 与平移速度相关的雅可比矩阵
0 0 Pe T f (q ) 0 1
以2自由度平面关节型机器人为例:
J J1 J2
f1 n m n R f m n
2、与平移速度有关的雅可比矩阵
相对于指尖坐标系的平移速度,是通过把坐标 原点固定在指尖上,指尖坐标系相对于基准坐 标系的平移速度来描述
O0 x0 y0 z0 Oe xe ye ze
:基准坐标系
:指尖坐标系
r f ( )
T m1 n1
r r1 , r2 , , rm R
1 , 2 , , n R
rj f j (1,2 ,,n )
机器人运动分析中的矩阵变换

ai
i1 整理课件
JLi bi1
JLi bi1ri1,e
J ai 0
Jai bi1
当第i关节为移动关节时
J li
J
a
i
bi1
0
当第i关节为转动关节时
Jli Jai
bi1 bi1
ri1,e
整理课件
b r 确定
i1
i 1 ,e
0
1、用b表示zi-1轴上的单位向量
b
0
1
▲雅可比矩阵的定义 ▲微分运动与广义速度 ▲雅可比矩阵的构造法 ▲PUMA560机器人的雅可比矩阵 ▲逆雅可比矩阵 ▲力雅可比矩阵
整理课件
上一章我们讨论了刚体的位姿描述、齐 次变换,机器人各连杆间的位移关系,建立 了机器人的运动学方程,研究了运动学逆解, 建立了操作空间与关节空间的映射关系。
本章将在位移分析的基础上,进行速度分 析,研究操作空间速度与关节空间速度之间 的线性映射关系——雅可比矩阵(简称雅可比)。 雅可比矩阵不仅用来表示操作空间与关节空 间之间的速度线性映射关系,同时也用来表 示两空间之间力的传递关系。
1
把它转换到基础坐标系中,即为
b i 1 0 R 1 (q 1 ) 1 R 2 (q 2 ) ...i 2 R i 1 (q i 1 ) b
整理课件
如右图所示。用O、Oi-1、 On分别表示基础坐标系、i-1 号坐标及手部坐标系的原点。 用矢量x表示在各自坐标系中 的原点。
x(0,0,0,1)T
d2(c2c4s5 s2c5)s2d3s4s5 s2(c2c4s6 s4s6)c2s5c6
s2(c2c4s6 s4c6)c2s5s6
s2c4s5 c2c5
d 3(c4c5c6 s4s6 )
机器人运动分析中的矩阵变换(PPT52页)

▲雅可比矩阵的定义 ▲微分运动与广义速度 ▲雅可比矩阵的构造法 ▲PUMA560机器人的雅可比矩阵 ▲逆雅可比矩阵 ▲力雅可比矩阵
上一章我们讨论了刚体的位姿描述、齐 次变换,机器人各连杆间的位移关系,建立 了机器人的运动学方程,研究了运动学逆解, 建立了操作空间与关节空间的映射关系。
本章将在位移分析的基础上,进行速度分 析,研究操作空间速度与关节空间速度之间 的线性映射关系——雅可比矩阵(简称雅可比)。 雅可比矩阵不仅用来表示操作空间与关节空 间之间的速度线性映射关系,同时也用来表 示两空间之间力的传递关系。
oz
az
0
0
0
ddi
对于移动关节
nz
oz
T
Ji
az
0
0
0
对于转动关节
(P n)z
(
P
0)
z
T
Ji
(
P
a) nz
z
oz
az
例:PUMA560的6个关节都是转动关节,其雅可比 有6列。此处用矢量积法计算J(q)
J ( q) J1 J2
J6
ny oy ay
( (
P P
n) o)
z z
d d
x y
(
P
a) nz
z
d
z
x
oz
y
az z
简写为:
T d RT RT S(P) d
T
0
RT
其中,R是旋转矩阵
nx ox ax
R
ny
oy
a
y
.
nz oz az
S(P)为矢量P的反对称矩阵 S(P)矩阵具有以下性质:
第3章_微分运动和速度
第3章 微分运动和速度3.1 引言微分运动指机构(这里指机器人)的微小运动,可以用它来推导不同部件之间的速度关系。
依据定义,微分运动就是小的运动。
因此,如果在一个小的时间段内测量或计算这个运动,就能得到速度关系。
本章将学习坐标系相对于固定坐标系的微分运动、机器人关节相对固定坐标系的微分运动、雅可比矩阵以及机器人速度关系。
本章包含了相当多的速度方面的术语,它们应该在动力学课程中见过。
但是如果现在已记不起这些术语,建议在学习下面的内容之前复习有关的知识。
3.2 微分关系首先要了解什么是微分关系。
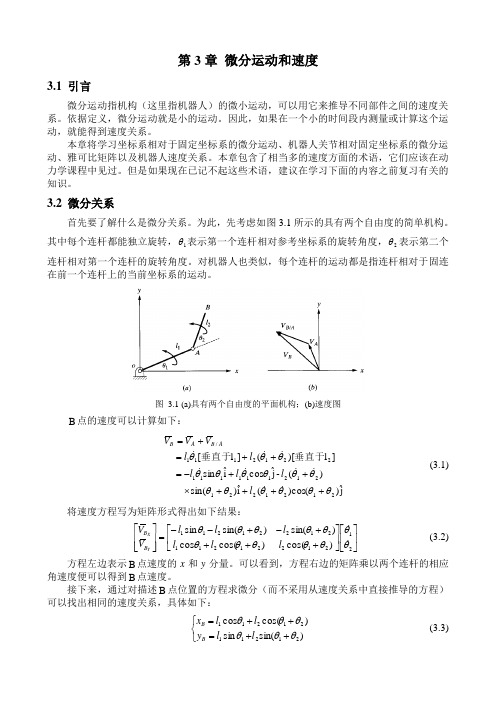
为此,先考虑如图3.1所示的具有两个自由度的简单机构。
其中每个连杆都能独立旋转,1θ表示第一个连杆相对参考坐标系的旋转角度,2θ表示第二个连杆相对第一个连杆的旋转角度。
对机器人也类似,每个连杆的运动都是指连杆相对于固连在前一个连杆上的当前坐标系的运动。
图 3.1 (a)具有两个自由度的平面机构;(b)速度图B 点的速度可以计算如下:jˆ)(cos )(i ˆ)(sin )(-j ˆcos i ˆsin ]l )[(]l [21212212121111112212111/θθθθθθθθθθθθθθθ++++⨯++-=++=+= l l l l l l V V V AB A B 垂直于垂直于 (3.1)将速度方程写为矩阵形式得出如下结果:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡++++-+--=⎥⎥⎦⎤⎢⎢⎣⎡212122121121221211)cos()cos(cos )sin()sin(sin θθθθθθθθθθθθ l l l l l l V V Y X B B (3.2) 方程左边表示B 点速度的x 和y 分量。
可以看到,方程右边的矩阵乘以两个连杆的相应角速度便可以得到B 点速度。
接下来,通过对描述B 点位置的方程求微分(而不采用从速度关系中直接推导的方程)可以找出相同的速度关系,具体如下:⎩⎨⎧++=++=)sin(sin )cos(cos 2121121211θθθθθθl l y l l x B B (3.3)对上述方程组中的变量1θ和2θ求微分,得:⎩⎨⎧++-=++--=)θ)(d θθ(θl d θθl dy )θ)(d θθ(θl d θθl dx B B 2121211121212111cos cos sin sin (3.4) 写成矩阵形式为:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡++++-+--=⎥⎦⎤⎢⎣⎡212122121121221211)cos()cos(cos )sin()sin(sin θθθθθθθθθθθθd d l l l l l l dy dx B B (3.5) B 点的 雅可比 关节的 微分运动 矩阵 微分运动可以注意到,式(3.2)与式(3.5)无论在内容上还是形式上都很相似。
工业机器人微分运动和速度
例:如图示二自由度机械手,手部沿固定坐标系X0轴正向以1.0m/s 速度移动,杆长为l1 =l2=0.5m。设在某瞬时θ1 =30o,θ2 = -60o ,求 相应瞬时的关节速度。
对于圆柱坐标机器人,给定在相应位置的3个关节速度如下,求 手坐标系速度的3个分量。 dr/dt=0.1,dα/dt=0.05,dl/dt=0.2,r=15,α= 30o,l=10 运动顺序为:先沿x轴移动r,再绕z轴旋转α角,最后沿z轴移动l。
沿x,y,z轴的 微分运动
绕x,y,z轴的 微分旋转
d1 dx d dy 2 d 3 dz 机器人雅可比矩阵 d x 4 d 5 y z d 6
假设,坐标系noa相对于参考坐标系做一个微量的运动。 从两种不同的角度来坐标系noa的变化。
z
a' a z o' o n' n a' a o'
o
n' n
x
y
x
y
只关注手部坐标系的运动
机器人的关节做微量运动导致了 手部坐标系的微量运动
3.6坐标系的微分运动 3.6.1微分平移: Transdx, dy, dz 例3.2 cos x 1 3.6.2微分旋转: sin x x用弧度
[T dT ] [Transdx, dy, dz Rotk , d ][T ]
[dT] [Transdx, dy, dz Rotk , d I ][T ]
令: [] [Transdx, dy, dz Rotk , d I ]
↓↓
0 z y dx z 0 x dy ,称为微分算子(相 则可得: y x 0 dz 对于固定参考坐标系)。 0 0 0 0
5速度分析和雅克比矩阵

线速度 角速度
例:图示4自由度机械臂为例分别求 线速度Jv和角速度Jw部分
求线速度Jv
将红色3*1部分对关节空间向量 [θ1 d2 θ3 θ4]求导可得
求角速度Jw 以2R为例说明
为θ1和θ2单独旋转后的合成,单独旋转角 度与a相同
列:关节
…
X qn Y qn Z qn X qn Y qn Z qn
…
线位移
…
J(q)
…
…
角位移
…
5、机器人速度分析和雅可比矩阵
5.4. 机器人的速度雅可比
由运动学方程可得:
X X (1 , 2 ) Y Y (1 , 2 )
求微分,得:
X X d X d d 2 1 1 2 dY Y d Y d 1 2 1 2
X 1 dX dY Y 1 X 2 d1 Y d 2 2
关节角度微小变化Δθ
雅可比矩阵J
手部位姿微小变化ΔX
如果已知两者之间的微分关系,就可以解决机器人微分运动的两类基本问题: 1)是在已知机器人各个关节变量的微小变化时求机器人手部位姿的微小变化;
2)是在已知机器人手部位姿的微小变化时求机器人各个关节变量相应的微小变化。
类似与运动学方程M=f(θ)建立映射关系
dX=J(q)dq
J(q)是6×n维偏导数矩阵,称为n自由度机器人雅可比
4、机器人运动学
5.3. 雅可比矩阵
X q J为机器人的雅可比矩阵,它 1 反映了机器人手部在空间的速 Y 度与各个关节速度之间的线性 q1 变换关系,也可认为是机器人 关节速度与手部速度之间的传 Z 动比 q1 X T q X 速度分析和静力分析 q 1 Y 行列关系:如第5行第3列表示当第3关 q1 节移动或转动微小量时在第5自由度上 相应的平移或转动量。 Z 行:自由度 那个是第5自由度?? q1 X q2 Y q 2 Z q2 X q2 Y q2 Z q2
机器人运动学雅克比矩阵第8讲机器人的微分运动与速度
前三行称为位置雅可比矩阵,代表对手爪线速度V 的传递 比;后三行称为方位矩阵,代表相应的关节速度 q?i 对手爪
角速度 ? 的传递比,因此将 J 分块为:
?V?
??? ??
?
?J i1 ??J a1
Ji2 Ja2
? ?
?q?1 ?
J in Ja2
三逆雅可比矩阵及奇异性雅可比矩阵的奇异性由此可见当雅可比矩阵的行列式为0时既使手爪的速度为一个定值关节速度也将趋于无穷大最终结果会导致关节及该关节的驱动装置损坏
第八讲 机器人的雅可比矩阵 与速度分析
(一)雅可比矩阵的定义 (二)雅可比矩阵的构造法 (三)逆雅可比矩阵 (四)力雅可比 (五)加速度关系
(一)雅可比矩阵的定义
? 把机器人关节速度向量 q?i 定义为:
q? ? ?q?1 q?2 ? ? q?n T
式中,q?i (1,2,? , n) 为连杆 i 相对于
i ? 1的角速度或线速度。
? 手爪在基坐标系中的广义速度向量为:
? ? V
?
?v?
???
? ?
?
x?
y?
z? ? x
?y
?z T
? q? 与 V之间的线性映射关系称为
比矩阵来确定关节速度向量。
? 当 J 是方阵时,可对J 直接求逆,得到 J ?1?q?,但比较困
难。
? 通常直接对机器人的逆解进行微分来求 J ?1?q?。
(三)逆雅可比矩阵及奇异性
例题:图中所示二自由度机械 手,手部沿固定坐标系 X正向 以1.0m/s 的速度移动,杆长 均为0.5m。设在某瞬时θ 1= 30°,θ 2=60°,求相应瞬 时的关节速度。
微分运动及雅可比矩阵PPT课件
0 0
0 0
0.1 0
0.1 0
dz
x
0 0 1 0 0 0 0 0.1 y
0 0 0
0
0
1 0.2
0.2
z
第7页/共66页
由例题可知: 刚体或坐标系的微分运动包含微分移动矢量
和微分转动矢量。前者由沿三个坐标轴的微分移 动组成;后者由绕三轴的微分转动组成。 雅克比矩阵的构造: 一、矢量积分法; 二、微分变化法。
0 0
0
1
l2 s12 l 2 c12
0 0 0 1
0 0 0 0 1 0 0 0 0 0
0 1
例3.1 给定某一时刻的机器人雅克比矩阵如下, 计算给定关节的微分运动,求机器人手坐标系 的线位移微分运动和角位移微分运动。
第15页/共66页
2 0 0 0 1 0
1 0 1 0 0 0
0 1 0 0 0 0
第1页/共66页
让我们计算一下B点的速度
VB VA VB/ A
根据物理学中的相关公式,可以得到
VVBBYX
l1 sin1 l2 sin(1 2 )
l1
co
s1
l2
co
s(1
2
)
l2 sin(1 2 )
l2
cos(1
2
)
12
接下来让我们对B点的位置方程求微分
X B l1 cos1 l2 cos(1 2 ) YB l1 sin1 l2sin(1 2 )
SCARA四自由度机器人的结构和运动具有如下特点:
四个关节,四个关节中有三个是转动关节(关节1、2、
4),一个是移动关节(关节3)。根据速度传递法可
推导出雅可比矩阵如下:
机器人的雅可比矩阵

机器人学院
机器人学技术基础
——雅可比矩阵
LOGO
机器人学院
一、引入
Tn T1T2 Tn
运动学方程只限于静态位 置问题的讨论,未涉及机 器人运动的速度、加速度 和力等动态过程。
nx ox ax px
Tn
ny n0z
oy oz 0
ay az 0
p
y
pz 1
动力学主要研究运动和 力的关系。
Tq F T D
机器人学院
假定关节无摩擦,并忽略各杆件的重力,则广义关节力矩τ与机器 人手部端点力F的关系可用下式描述:
τ = JTF
式中: JT为n*6阶机器人力雅可 比矩阵,并且是机器人 速度雅可比J的转置矩阵。
它表示静态平衡状态下,操作力 向关节力映射的线性关系。
思考与速度雅可比有什么不同
机器人学院
机器人学院
• 上述计算中,当θ2趋于0°或180°时,机械手的雅可比行列式 为0,其逆不存在,此时机械手处于奇异状态,相应关节速度 将趋于无穷大。
• 从几何上看,机械手完全伸直或完全缩回时,机械手末端丧失 了径向自由度,仅能沿切向运动。在奇异形位时,机械手在操 作空间的自由度将减少。
机器人学院
)
速度雅可比矩阵反映了关节空间的微小 运动dθ与手部空间(操作空间)微小位 移dX的关系。
dX
X
1
d1
X
2
d2
dY
Y
1
d1
Y
2
d2
X
dX dY
1
Y
1
机器人雅可比矩阵

δ
注意:D的微分位移和旋转应看作通过基坐标系的 原点的矢量。
T T
dx dy
d d
n o
p p
n o
n o
p p
d d
T dz d a p a a p d
T T
x y
n o
T z
a
pa
d
Td
o {T} n
T T
dx dy
d d
n o
p p
关节角位置和操作臂末端的直角坐标位置
x x(q)
运动学正解
q
关节空间
操作空间 x x(q)
运动学反解
关节角速度和操作臂末端的直角坐标速度
运动学正解
关节空间
操作空间
运动学反解
4.1 雅可比矩阵的定义(Jacobian matrix)
操作空间速度与关节空间速度之间的线性变 换。
x J (q)q
对于关节空间的某些形位q,操作臂的雅可比矩阵 的秩减少、这些形位称为操作臂的奇异形位:
(singular configuration)
操作臂的雅可比矩阵的秩减少的形位(数学上) 操作臂在操作空间的自由度将减少(物理上)
例4.1
y
l2
l1 1 x
可利用雅可比矩阵的行列式判别奇异形位
(x,y) 2
当2=90或2 =0时,机械手的雅可比行列式为0.矩阵的秩为1,因而处于 奇异状态。从几何上看机械手完全伸直(2 =0)或完全缩回(2 =180)时, 机械手末端丧失了径向自由度.仅能沿切向运动,在奇异形位时,机械手
y2 (u1, u2 ,
ym (u1, u2 ,
,un ) ,un )
y相对于u的偏导数定义为
机器人速度分析和雅可比矩阵

[]
x6 z2 x3 z0 z1 ③ o2 o0 o1 x0 x1 x2 ② o3 Ⅳ ④ Ⅱ Ⅲ Ⅰ ① z3 x5 z5 ⑤ x4 z4 ⑥ 6 Ⅵ
6
υz
z6
o4 Ⅴ o5 o6 2、末杆速度的定义: 、末杆速度的定义:
ωz
沿末杆坐标轴的速度矢量
绕末杆坐标轴的角速度矢量
6 υx 6 υ y υ 6 υz6 6 = 6 ω ωx ω6 y 6 ωz
0 0 0 0 0 1
全转动关节机器人计算公式
1 1 v 6 ( p6 × n6 ) z x 6 1 1 v y ( p6 × o6 ) z 1 1 v z6 ( p6 × a6 ) z 6 = 1 ω x ( n6 ) z ω 6 (o1 ) 6 z y 1 6 ω z (a6 ) z 2 2 ( p6 × n6 ) z 2 2 ( p6 × o6 ) z 2 2 ( p6 × a6 ) z 2 ( n6 ) z 2 (o6 ) z 2 (a6 ) z 3 3 ( p6 × n6 ) z 3 3 ( p6 × o6 ) z 3 3 ( p6 × a6 ) z 3 ( n6 ) z 3 (o6 ) z 3 (a6 ) z 4 4 ( p6 × n6 ) z 4 4 ( p6 × o6 ) z 4 4 ( p6 × a6 ) z 4 ( n6 ) z 4 (o6 ) z 4 (a6 ) z 5 5 ( p6 × n6 ) z 5 5 ( p6 × o6 ) z 5 5 ( p6 × a6 ) z 5 ( n6 ) z 5 (o6 ) z 5 (a6 ) z
6 υ x nx υ 6 o y 6 x υz ax 6 = ω x 0 ω 6 0 y ω 6 0 z
机器人操作的数学导论——机器人运动学
可以证明
均为反对 称矩阵
1、刚体速度
1.1转动速度
定义瞬时物体角速度
∈R3
由以上两式可得两种角速度的关系:
于是一点的速度可以表示为: 空间坐标系中: 物体坐标系中:
1、刚体速度
1.2 刚体速度 考虑刚体运动轨迹为单参数曲线 gab(t)∈SE(3)的一般情况
求取:
上式在形式上与运动旋量相似,类比旋转速度,定义空间速度
旋量的对偶积
用运动旋量坐标表示为:
2、力旋量和对偶旋量
2.3 对偶旋量
旋量系{S1,…,Sk}描述的是旋量{S1,…,Sk}的所有线性组 合构成的矢量空间。对偶旋量系是与Si对偶的所有旋量的集合。
旋量系与其对偶系的维数之和为6(在SE(3)中)。
旋量系和对偶旋量系可用于分析抓取及机构的可动性。
3、机器人运动学正解
机器人运动学正解指:在给定组成运动副的相邻连杆的相对位置 情况下,确定机器人末端执行器的位行。 机器人关节空间Q由机器人关节变量的所有可能值构成,这也 可以理解为机器人的位形空间。
运动学正解问题可用如下映射来表示:
运动学正解问题就是如何构造映射gst。
3、机器人运动学正解
对右图所示的两自由度机器人 的运动学正解映射可通过将由各关 节引起的刚体运动加以组合来构成。 T对S的位形
4、机器人的雅可比矩阵
4.1 雅可比矩阵 由前面知识知道,末端执行器的空间瞬时速度可表示为:
将上式写成
称矩阵 为机器人的空间雅可比矩阵,对任一位 形,它将关节速度矢量映射为对应的末端执行器速度。
4、机器人的雅可比矩阵
4.1 雅可比矩阵 用指数积公式来表示运动学正解,
S J ST ( ) 1' 2'
[工学]第四章微分运动和雅可比矩阵
![[工学]第四章微分运动和雅可比矩阵](https://img.taocdn.com/s3/m/b36b774c25c52cc58bd6be39.png)
d d i dj d k 或 x y z
T d [ d d d ] x y z
i k 或 x yj z
T [ ] x y z
相应的,广义速度V的坐标变换为:
T T T R RS (P ) T T R 0
任意两坐标系A和B之间广义速度的坐标变换为:
R RS ( P) B A R 0
1
▲雅可比矩阵的定义
▲微分运动与广义速度
▲雅可比矩阵的构造法
▲PUMA560机器人的雅可比矩阵
▲逆雅可比矩阵
▲力雅可比矩阵
上一章我们讨论了刚体的位姿描述、齐 次变换,机器人各连杆间的位移关系,建立 了机器人的运动学方程,研究了运动学逆解, 建立了操作空间与关节空间的映射关系。 本章将在位移分析的基础上,进行速度分 析,研究操作空间速度与关节空间速度之间 的线性映射关系——雅可比矩阵(简称雅可比)。 雅可比矩阵不仅用来表示操作空间与关节空 间之间的速度线性映射关系,同时也用来表 示两空间之间力的传递关系。
(位姿)矢量P可写成:
x(q1, ,q n ) y (q , ,q ) 1 n z(q1, ,q n ) P x (q1, , q n ) (q , , q ) n y 1 z ( q 1 , , q n )
上式对时间求导,有:
B B A B T A A B O B A A
q2 z q2
y qn x qn y qn z q n x qn
机器人雅各比矩阵
速度雅可比矩阵与速度分析
机器人雅可比矩阵(简称雅可比,Jacobian Matrix)揭示了操 作空间与关节空间的映射关系。雅可比不仅表示操作空间与关
机器人速度分析
对前式左、右两边各除以dt,得 或表示为 式中:V
dX dq =J (q) dt dt
V = X =J (q )q
为机器人末端在操作空间中的广义速度; 为机器人关节在关节空间中的关节速度;
q
J(q) 为确定关节空间速度
q
,与操作空间
速度V之间关系的雅可比矩阵。
对于2R机器人
V 1 x V = =J (q ) Vy 2
即
x x (1 , 2 ) y y (1 , 2 )
x x dx d1 d 2 1 2 y y dy d1 d 2 1 2
x 1 dx dy y 1 x 2 d1 y d 2 2
将其微分得
写成矩阵形式为
令
x J 1 y 1
x 2 y 2
前式简写为
dX Jd
d1 d d 2
式中
dx dX dy
J称为2R机器人的速度雅可比,它反映了关节空间微小运动 dθ与手部作业空间微小位移dX的关系。
可见,J 阵的值是关于θ1及θ2的函数。
对于n自由度机器人 广义关节变量: q= [q1, q2, …, qn]T
scara机器人运动学方程雅可比矩阵

scara机器人运动学方程雅可比矩阵
Scara机器人是一种广泛应用于工业领域的机器人,它的运动学方程雅可比矩阵是描述其运动学性能的重要工具。
通过雅可比矩阵,我们可以了解到Scara机器人在不同关节位置和速度下的末端执行器的速度和位置关系。
雅可比矩阵是一个2x3的矩阵,其中的元素代表了末端执行器位置和速度相对于关节角度和速度的变化率。
简单来说,雅可比矩阵可以帮助我们理解Scara机器人的动力学特性和运动规律。
通过对雅可比矩阵的分析,我们可以得到一些有用的信息。
首先,我们可以确定Scara机器人的工作空间范围,即机器人可以到达的位置和姿态。
其次,我们可以根据雅可比矩阵来计算机器人在不同关节角速度下的末端执行器速度,从而实现机器人的精确控制。
除此之外,雅可比矩阵还可以用于路径规划和碰撞检测。
通过计算机器人在不同关节位置下的雅可比矩阵,我们可以确定机器人在执行任务过程中是否会发生碰撞,从而避免潜在的安全风险。
Scara机器人的运动学方程雅可比矩阵是研究机器人运动学行为和控制的重要工具。
通过对雅可比矩阵的研究和分析,我们可以深入理解机器人的运动规律,并实现对机器人的精确控制和路径规划。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 若给定机器人手爪的广义速度向量 V ,由式V J q• q
可解出相应的关节速度: q J 1q•V J 1q称为逆雅可比矩阵,q为加给对应关节进给伺服系统
的速度输入变量。
• 当 J 不是方阵时,J 1q 是不存在的,可以用广义逆雅可
比矩阵来确定关节速度向量。
• 当 J是方阵时,可对J 直接求逆,得到 J 1q,但比较困
1q
J *q J q
由此可见,当雅可比矩阵的 行列式为0时,既使手爪的
若 Jq 0
速度为一个定值,关节速
度也将趋于无穷大,最终
则 J 1 q
结果会导致关节及该关节 的驱动装置损坏。
q J 1q•V
雅可比矩阵的奇异性
• 如前所述,雅可比矩阵不是一个常数矩阵,它的 行列式值随着机械手的运动在变化;
l2 sin(2 1)
l2
cos(2
1 )
J l1 sin1 l2 sin(2 1 ) l1 cos1 l2 cos( 2 1 )
l1l2 sin 2
l2 sin(2 1 ) l2 cos(2 1 )
显然,连杆的长度是不可能为0的;因此,若 2 k , 则 J 0 。机构出现奇异。该机构的奇异形位就是两连 杆完全伸展或完全折叠,即机构工作空间的边界处。
x y T 容易确定,且方位 与角运动的形成顺 序无关,可采用直接微分法求 J ,非常方便。
(一)雅可比矩阵的定义
• 直接微分法对于三维空间运行的机器人则不完全适用。从
机器人运动学方程,可以获得直角坐标位置向量 x y zT
的显式方程,但找不到方位向量 x y z T 的一般表达式。
不能用直接微分法求雅可比矩阵,应采用构造法。
• 对左式求导,有:
(一)雅可比矩阵的定义
• 在机器人学中,雅可比矩阵是一个把关节 速度向量变换为手爪相对于基座标的广义 速度向量的变换矩阵。
• 在三维空间运行的机器人,J的行数恒为6; 在二维平面运行的机器人, J的行数恒为3; 列数则为机械手含有的关节数目。
(一)雅可比矩阵的定义
• 对于平面运动的机器人来说,手的广义位置向量
(一)雅可比矩阵的定义
• 把机器人关节速度向量 qi 定义为:
q q1 q2 qn T
式中,qi (1,2, , n) 为连杆 i 相对于
i 1的角速度或线速度。
• 手爪在基坐标系中的广义速度向量为:
V
v
x
y
z
x
y
z T
• q与 V 之间的线性映射关系称为
雅可比矩阵J,即:
x
y
zxΒιβλιοθήκη yJq1
q2
qn
z
(一)雅可比矩阵的定义
• 在数学上,机器人终 端手爪的广义位姿向
量 V 可写成:
x(q1, q2 , , qn )
y(q1, q2 ,
,qn )
P
zx((qq11,,qq22,
,
,
,qqnn))
y
(q1, q2 ,
,
q
n
)
z (q1, q2 , , qn )
难。
• 通常直接对机器人的逆解进行微分来求 J 1q。
(三)逆雅可比矩阵及奇异性
例题:图中所示二自由度机械 手,手部沿固定坐标系X正向 以1.0m/s的速度移动,杆长 均为0.5m。设在某瞬时θ1= 30°,θ2=60°,求相应瞬 时的关节速度。
(三)逆雅可比矩阵及奇异性
• 雅可比矩阵的奇异性
J
• 因此,当机械手运动到某个形位时,恰好使此时 的雅可比行列式值为0,就会造成奇异,此时机械 手的形位成为奇异形位;
• 机械手在工作时,应避开奇异形位附近,以免发 生危险,这导致了机械手的工作空间进一步缩小。
奇异性的例子
J
l1 sin1 l2 sin(2 1)
l1
cos1
l2
cos(2
1 )
l2
cos(2
1 )
•
12
末端速度向量
雅可比矩阵J
关节速度向量
xB l1 cos1 l2 cos(2 1) yB l1 sin1 l2 sin(2 1)
xB l1 sin1 •1 l2 sin(2 1) • (2 1) yB l1 cos1 •1 l2 cos(2 1) • (2 1)
J i1 J a1
Ji2 Ja2
q1
J in Ja2
q2 qn
矢量积法构造雅可比矩阵
• 对于移动关节 i
v w
zi 0
qi ,
Ji
zi
0
• 对于转动关节 i
v w
zi
i pno zi
qi ,
Ji
zi
i pno zi
i pno oi Ri pn
(三)逆雅可比矩阵及奇异性
结论
• 雅可比(Jacobian)矩阵反映了机械臂末端速度 和各关节速度之间的关系;
• 雅可比(Jacobian)矩阵不是一个常数矩阵,它 与关节变量有关,机械臂工作时,各关节协调运 动,关节变量是变化的,雅可比(Jacobian)矩 阵也是变矩阵;
• 雅可比(Jacobian)矩阵的求法与求导有关; • 雅可比(Jacobian)矩阵具有重要的研究意义;
例二、三自由度平面机械手
写成矩阵形式:
VA
Vx V y
xA
yA
θ
0.8sin1
0.8cos1 1
由图可知:
0.4sin2 0.5sin3
0.42 cos32
0.5 cos3
•
12
z
xA
1
0.8 cos1
0.4
1
cos(2
1 )
1 0.5
cos(
332
1 )
手爪速度向量
yA 雅0可.8s比in矩1 阵0J.4sin(2 1关) 节0.5速sin度(向3 量2 1)
1 2 3
xA 0.8sin1 •1 0.4sin(2 1) • (2 1) 0.5sin(3 2 1) • (3 2 1)
yA 0.8 cos1 •1 0.4 cos(2 1) • (2 1) 0.5 cos(3 2 1) • (3 2 1)
第八讲 机器人的雅可比矩阵 与速度分析
(一)雅可比矩阵的定义 (二)雅可比矩阵的构造法 (三)逆雅可比矩阵 (四)力雅可比 (五)加速度关系
例一:两自由度平面机构
写成矩阵形式:
VB
Vx
Vy
xB
yB
l1 sin1 l2 sin(2 1)
l1
c
os1
l2
c
os
(2
1
)
l2 sin(2 1)
(二)雅可比矩阵的构造法
• 矢量积法和微分构造法:V J q• q D J q• dq
• 对于有n个关节的机器人,其雅可比矩阵是6×n矩阵,其
前三行称为位置雅可比矩阵,代表对手爪线速度V 的传递 比;后三行称为方位矩阵,代表相应的关节速度 qi 对手爪
角速度 的传递比,因此将 J 分块为:
V