伺服电机制动器选型表
伺服电机选型计算xls 表格计算

TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 0.037
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
T1=TA+TL T2=TL T3=TL-TA
0.0523 0.0156 -0.0211
0.029
⑨讨论 负载惯量JL 有效转矩Trms
1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
kg.m2 >
初步
选择
定
R88M
-
U200
30(J
m=
根据
R88M
-
1.6E-02
U200 30的
额定转矩Tm=源自N.m1.23E-05
0.637
(N.m )
N.m N.m N.m
N.m
≦[电机 的转子惯 量JM
﹤[电机 的额定转 矩
×
[适
1.23E-05
用的 惯量
比
=30]
0.5096 N.M
﹤[电机 的瞬时最 大转矩 ≦[电机 的额定转 数 U系列的 编码器规 格为2048 (脉冲/ 转),经 编码器分 频比设定 至1000 (脉冲/ 转)的情 况下使用 。
10 15 20
3 0.1
1
80 40 0.5 0.2 0.01
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
负载的惯量JW=
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
④负载转 矩的计算
伺服选型参考
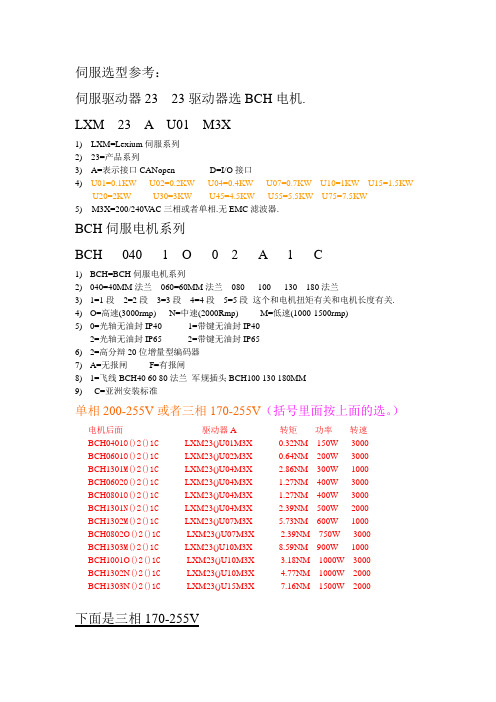
伺服选型参考:伺服驱动器23 23驱动器选BCH电机.LXM 23 A U01 M3X1) LXM=Lexium伺服系列2) 23=产品系列3) A=表示接口CANopen D=I/O接口4) U01=0.1KW U02=0.2KW U04=0.4KW U07=0.7KW U10=1KW U15=1.5KWU20=2KW U30=3KW U45=4.5KW U55=5.5KW U75=7.5KW5)M3X=200/240V AC三相或者单相.无EMC滤波器.BCH伺服电机系列BCH 040 1 O 0 2 A 1 C1)BCH=BCH伺服电机系列2)040=40MM法兰060=60MM法兰080 100 130 180法兰3)1=1段2=2段3=3段4=4段5=5段这个和电机扭矩有关和电机长度有关.4)O=高速(3000rmp) N=中速(2000Rmp) M=低速(1000-1500rmp)5)0=光轴无油封IP40 1=带键无油封IP402=光轴无油封IP65 2=带键无油封IP656)2=高分辩20位增量型编码器7)A=无报闸F=有报闸8)1=飞线BCH40 60 80法兰军规插头BCH100 130 180MM9)C=亚洲安装标准单相200-255V或者三相170-255V(括号里面按上面的选。
)电机后面驱动器A 转矩功率转速BCH0401O()2()1C LXM23()U01M3X 0.32NM 150W 3000BCH0601O()2()1C LXM23()U02M3X 0.64NM 200W 3000BCH1301M()2()1C LXM23()U04M3X 2.86NM 300W 1000BCH0602O()2()1C LXM23()U04M3X 1.27NM 400W 3000BCH0801O()2()1C LXM23()U04M3X 1.27NM 400W 3000BCH1301N()2()1C LXM23()U04M3X 2.39NM 500W 2000BCH1302M()2()1C LXM23()U07M3X 5.73NM 600W 1000BCH0802O()2()1C LXM23()U07M3X 2.39NM 750W 3000BCH1303M()2()1C LXM23()U10M3X 8.59NM 900W 1000BCH1001O()2()1C LXM23()U10M3X 3.18NM 1000W 3000BCH1302N()2()1C LXM23()U10M3X 4.77NM 1000W 2000BCH1303N()2()1C LXM23()U15M3X 7.16NM 1500W 2000下面是三相170-255VBCH1002O()2()1C LXM23()U20M3X 6.37NM 2000W 3000BCH1304N()2()1C LXM23()U20M3X 9.55NM 2000W 2000BCH1801N()2()1C LXM23()U20M3X 9.55NM 2000W 2000rmpBCH1802N()2()1C LXM23()U30M3X 14.32NM 3000W 2000rmpBCH1802M()2()1C LXM23()U30M3X 19.1NM 3000W 1500rmpBCH1803N()2()1C LXM23()U45M3X 16.71NM 3500W 2000rmpBCH1803M()2()1C LXM23()U45M3X 28.65NM 4500W 1500rmp BCH1804M()2()1C LXM23()U55M3X 35.01NM 5500W 1500rmp BCH1805M()2()1C LXM23()U75M3X 47.74NM 7500W 1500rmpLXM32伺服驱动器系列32的选BMH或者BSH电机。
华大系列伺服电机选型手册

LB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~27额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):220LBB系列机座号(mm):80、110、130、150额定转矩(Nm):1.3~19.1额定功率(Kw):0.4~3.0额定转速(rpm):1500、2000、3000最高转速(rpm):3000、5000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):220HB系列机座号(mm):110、130、150额定转矩(Nm):2~27额定功率(Kw):0.6~5.5额定转速(rpm):1500、2000、2500、3000最高转速(rpm):/转子惯量:中惯量标配反馈元件:增量式编码器(2500C/T)失电制动器:可配适配驱动器工作电压(VAC):380HBB系列机座号(mm):110、130、150额定转矩(Nm):2.4~28.7额定功率(Kw):0.4~5.5额定转速(rpm):1500、2000最高转速(rpm):3000转子惯量:中惯量标配反馈元件:总线式光电编码器失电制动器:可配适配驱动器工作电压(VAC):380请您关注以下伺服电机为自冷式散热方式,安装时请选择足够大的安装板。
伺服电机长期工作,机体本身会有一定的温度,这是正常情况。
装配了失电制动器的伺服电机,其失电制动器的电源必须由驱动器控制开闭,否则会造成工作状态不佳。
伺服电机内装精密反馈元件,严禁重力敲击电机轴伸端及后部。
请注意电机轴伸端的最大径、轴向力的限值。
严禁随意更改、拆装及加工电机部件。
请您将需求告之我们,我们来为您服务。
电机电联接器转矩转速曲线示意图LB 、HB系列 LBB 、HBB 系列LB、LBB 、HB 、HBB 系列伺服电机的Mmax=3Mn ;Mmax 输出状态为短时工作。
交流伺服电机选型手册范本
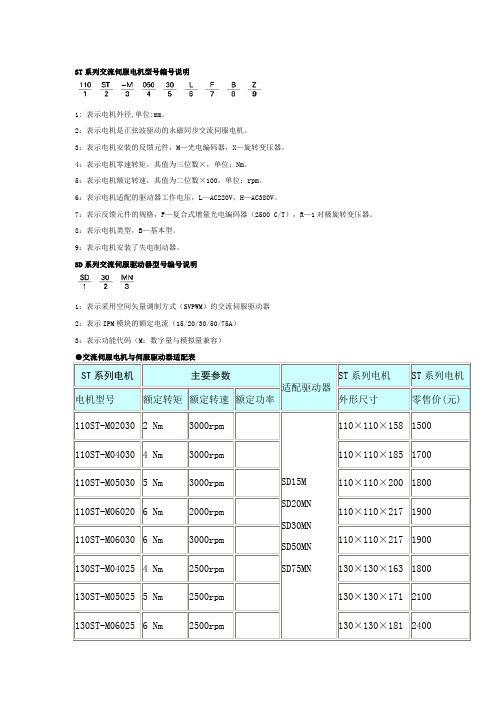
ST系列交流伺服电机型号编号说明1: 表示电机外径,单位:mm。
2:表示电机是正弦波驱动的永磁同步交流伺服电机。
3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。
4:表示电机零速转矩,其值为三位数×,单位:Nm。
5:表示电机额定转速,其值为二位数×100,单位:rpm。
6:表示电机适配的驱动器工作电压,L—AC220V,H—AC380V。
7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T),R—1对极旋转变压器。
8:表示电机类型,B—基本型。
9:表示电机安装了失电制动器。
SD系列交流伺服驱动器型号编号说明1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器2:表示IPM模块的额定电流(15/20/30/50/75A)3:表示功能代码(M:数字量与模拟量兼容)●交流伺服电机与伺服驱动器适配表ST系列电机主要参数适配驱动器ST系列电机ST系列电机电机型号额定转矩额定转速额定功率外形尺寸零售价(元) 110ST-M02030 2 Nm3000rpmSD15MSD20MNSD30MNSD50MNSD75MN110×110×1581500110ST-M04030 4 Nm3000rpm110×110×1851700110ST-M05030 5 Nm3000rpm110×110×2001800110ST-M06020 6 Nm2000rpm110×110×2171900110ST-M06030 6 Nm3000rpm110×110×2171900130ST-M04025 4 Nm2500rpm130×130×1631800130ST-M05025 5 Nm2500rpm130×130×1712100130ST-M06025 6 Nm2500rpm130×130×1812400130ST-M07720Nm2000rpm130×130×1952900130ST-M07730 Nm3000rpm130×130×1952900 130ST-M1001510 Nm1500rpm130×130×2193200 130ST-M1002510 Nm2500rpm130×130×2193200 130ST-M1501515 Nm1500rpm130×130×2673620 130ST-M1502515 Nm2500rpm130×130×2673620 ST系列交流伺服电机110系列电机参数表电机型号110ST-M0203110ST-M0403110ST-M0503110ST-M0602110ST-M0603功率(Kw)额定转矩(Nm)24566额定转速(Rpm)30003000300020003000交流伺服电机与伺服驱动器安装尺寸ST系列交流伺服电机安装尺寸SD15M伺服驱动器安装尺寸SD20MN/30MN安装尺寸相关标签:电机, 伺服电机,相关产品WA-99UZWA-97TY步进电机的简单原印染专用步进电机直联型的步进电机相关新闻2011电源管理及LED 精彩方案且看海默科技.............................................2011年03月18日安森美半导体将在IIC-China 2011展出多种高能效方案...................................2011年03月18日步进电机发热问题及对策.............................................................2011年03月18日泽野驱动器2011隆重上市.............................................................2011年03月18日Allegro推出汽车级可编程双极步进电动机驱动器IC......................................2011年03月18日泽野电机34系列步进电机上市.........................................................2011年03月15日步进电机14问.......................................................................2011年03月15日用集成脉冲输出触发步进电机驱动器...................................................2011年03月15日白山机电—DM系列产品荣登2011SIAF 展................................................2011年03月15日加快电机动力系统技术创新...........................................................2011年03月15日交流伺服系统在许多性能方面都优于步进电机...........................................2011年03月09日交流伺服电机传动技术实现了高精度的位置控制.........................................2011年03月09日低速大扭矩交流伺服电机驱动单螺杆挤出机.............................................2011年03月09日北仑伺服电机产业蓬勃兴起...........................................................2011年03月09日伺服电机与变频电机的区别...........................................................2011年03月09日哈电填补世界“百万级”水轮发电机通风技术空白.......................................2011年03月02日日本电器零售商山田电机6月进津......................................................2011年03月02日联宜电机续发行亿元短期融资券. (2011)年03月02日对决:优派Pro8200vs三菱电机HC4000..................................................2011年03月02日三菱电机放电加工机技术交流会举办...................................................2011年03月02日步进电机和交流伺服电机性能比较.....................................................2011年01月14日伺服电机被步进脉冲控制的优点.......................................................2011年01月14日三菱电梯创新成产业发展新动力.......................................................2011年01月14日威力变频洗衣机智能洗涤更节能......................................................2011年01月14日西门子电气传动有限公司牵引电机及风力发电机扩大产能.................................2011年01月14日交流伺服电机传动技术实现了高精度的位置控制.........................................2011年01月12日伺服电机被步进脉冲控制的优点.......................................................2011年01月12日2010年推出具有运动控制功能的伺服专用芯片...........................................2011年01月12日伺服电机满足运动过程中精准的控制方式...............................................2011年01月12日环形变压器的应用指南...............................................................2011年01月12日雷赛:步进伺服专家运动控制先锋....................................................2011年01月07日交流伺服电机传动技术实现了高精度的位置控制.........................................2011年01月07日瑞萨电子32位MCU在伺服电机中的应用.................................................2011年01月07日申力步进电机二相八线接线方法.......................................................2011年01月07日如何用简单的方法调整两相步进电机通电后的转动方向..................................2011年01月05日一种步进电机及其驱动器干扰问题解决措施.............................................2011年01月05日第14届中国(国际)小电机展掠影.......................................................2011年01月05日线切割机床驱动选型支招.............................................................2011年01月05日步进马达市场总结分析及发展趋势.....................................................2010年12月31日步进电机应用2010年12月31日运动控制系统简介...................................................................2010年12月31日发现步进电机定位不准怎么办.........................................................2010年12月31日何为驱动器的细分...................................................................2010年12月31日步进电机使用时的注意事项...........................................................2010年12月29日解决步进电机干拢问题的发法.........................................................2010年12月29日关于步进电机的发热.................................................................2010年12月29日关于步进电机和伺服电机的区别.......................................................2010年12月29日乐创自动化推出三相混合式步进电机驱动器.............................................2010年12月29日步进电机原理及使用说明.............................................................2010年12月22日步进电机控制器的设计...............................................................2010年12月22日一体化步进电机驱动器...............................................................2010年12月22日作为机床通信中心的Sinumerik.......................................................2010年12月22日全电动注塑机电控原理...............................................................2010年12月22日步进电机的问题解答.................................................................2010年12月15日申力步进电机二相八线接线方法.......................................................2010年12月15日步进电机的种类和特点...............................................................2010年12月15日新的步进电机控制器/驱动器简化步进电机系统设计......................................2010年12月15日“株洲动力”创造世界高铁运营最高速.................................................2010年12月08日三洋开始量产号称全球转换率最高.....................................................2010年12月08日2010年中国电机工程学会年会在海口举行...............................................2010年12月08日山社电机株式会社开拓中国市场.......................................................2010年11月24日木工雕刻机中步进电机驱动器选型注意事项.............................................2010年11月24日关于步进电机的发热.................................................................2010年11月24日申力步进电机二相八线接线方法.......................................................2010年11月24日步进电机的一些基本参数.............................................................2010年11月03日反应式步进电机.....................................................................2010年11月03日步进电机驱动器的故障分析...........................................................2010年11月01日步进电机的最新技术发展.............................................................2010年10月21日60ST-M系列交流伺服电机技术参详绝缘电阻——500VDC 100MW Min绝缘强度——1500VAC 1Minute环境温度—— -20℃~ +50℃绝缘等级——B级60ST-M系列交流伺服电机优点1、无电刷和换向器,因此工作可靠,对维护和保养要求低。
伺服电机选型表格最新

200W 200W 200W 400W 400W 400W 400W 750W 750W 200W 200W 200W 200W 400W 400W 400W 400W 750W 750W 1.0KW 1.0KW 1.5KW 1.5KW 2.0KW 2.0KW 3.0KW 3.0KW 4.0KW 4.0KW 5.0KW 5.0KW 1.0KW 1.0KW 1.5KW 1.5KW 2.0KW
功率 50W 50w 50W 50W 100W 100W 100W 100W 200W
200W 200W 200W 400W 400W 400W 400W 750W 750W 1.0KW 1.0KW 1.5KW 1.5KW 2.0KW 2.0KW 3.0KW 3.0KW 4.0KW 4.0KW 5.0KW 5.0KW 1.0KW 1.0KW 1.5KW
MDME 152S1 MDME 202G1 MDME 202S1 MDME 302G1 MDME 302S1 MDME 402G1 MDME 402S1 MDME 502G1 MDME 502S1 MGME 092G1 MGME 092S1 MGME 202G1 MGME 202S1 MGME 302G1 MGME 302S1 MHME 102G1 MHME 102S1 MHME 152G1 MHME 152S1 MHME 202G1 MHME 202S1 MHME 302G1 MHME 302S1 MHME 402G1 MHME 402S1 MHME 502G1 MHME 502S1 MSMD 5AZG1 MSMD 5AZS1 MSME 5AZG1 MSME 5AZS1 MSMD 011G1 MSMD 011S1 MSMD 012G1 MSMD 012S1 MSMD 021G1
伺服电机选型计算ls表格计算

1.528 N.M
3000
r/mi n
条件满足 条件满足
条件满足 条件满足
条件满足
换算到电机轴负载转矩TL=Tw
⑤旋转数 的计算
转数N
⑥电机的 初步选定 [选自 OMNUC U 系列的初 步选定举 例]
N=60V/P.G
选定电机的转子·惯量为负载的 1/30*以上的电机
JM≥JL/30
0.015605096 320
6.9017E-06
选定电机的额定转矩×0.8 比换算到电机轴负载转矩 大的电机N.m
TMx0.8>TL
* 此值因各系列而异,请加以注 意。
⑦加减速 转矩的计 算
加减速转矩TA
0.5096 0.037
⑧瞬时最 大转矩、 有效转矩 的计算
必要的瞬时最大转矩为T1
有效转矩Trms为
T1=TA+TL T2=TL T3=TL-TA
0.0523 0.0156 -0.0211
0.029
⑨讨论 负载惯量JL 有效转矩Trms
10 15 20
3 0.1
1
80 40 0.5 0.2 0.01
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
负载的惯量JW=
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
④负载转 矩的计算
对摩擦力的转矩Tw
0.00015 0.000207051 0.000207051
0.015605096
2.07E-04 kg.m2 0.029 N.m
瞬时最大转矩T1 必要的最大转数N
编码器分辨率R=P.G/AP.S
0.0523 N.m 320 r/min
伺服电机选型计算数据表

速度 (mm/s)
300
0 0.2
300
0 1
300 360 1.4 0.2 0.01
0.2 时间(s)
③换算到 电机轴负 载惯量的 计算
滚珠丝杠的惯量JB=
1.50E-04 kg.m2
负载的惯量JW=
1.63E-04 kg.m2
换算到电机轴负载惯量JL=JW
JL=G2x(JW+J2)+J1
1.63E-04 kg.m2
#REF!
N.m
0.1726 N.m
1800 r/min 1000 (脉冲/转)
﹤[电 机的额 定转矩 ﹤[电 机的瞬 时最大 转矩 ≦[电 机的额 定转数 U系列 的编码
初步 选择 定 R88M U200 30(J m=
1.23E-05
根据
R88M
-
7.8E-03
U200 30的
额定
转矩
Tm=
①机械系
统的决定
负载质量M(kg)
5
·滚珠丝杠节距P(mm)
10
·滚珠丝杠直径D(mm)
20
·滚珠丝杠质量MB(kg)
3
·滚珠丝杠摩擦系数μ
0.1
·因无减速器,所以G=1、η=1
1
②动作模 式的决定
单一变化 ·负载移动速度V(mm/s) ·行程L(mm) ·行程时间tS(s) ·加减速时间tA(s) ·定位精度AP(mm)
0.5096 > 7.8E-03
0.165 N.m
0.1726 N.m 0.0078 N.m -0.1570 N.m #REF! N.m
⑨讨论 负载惯量JL
有效转矩Trms 瞬时最大转矩T1 必要的最大转数N 编码器分辨率R=P.G/AP.S
伺服电机及选型完整版

伺服电机及选型HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】伺服电机伺服电机(servomotor)是指在伺服系统中控制机械元件运转的发动机。
伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,可把所收到的转换成电动机轴上的角位移或输出。
“伺服”一词源于希腊语“奴隶”的意思,“伺服电机”可以理解为绝对服从控制信号指挥的电机:在控制信号发出之前,转子静止不动,当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。
因此伺服电机指的是随时跟随命令进行动作的一种电机,是以其工作性质命名的。
伺服主要靠脉冲来定位,伺服电机接收到一个脉冲就会旋转一个脉冲对应的角度,从而实现位移。
伺服本身带有编码器,具备发出脉冲的功能,所以伺服电机每旋转一个角度,就会发出对应数量的脉冲。
等于是把电机旋转的详细信息反馈回去,形成闭环。
这样的话,系统就会知道发了多少脉冲给电机,同时又收了多少脉冲回来,这样就能很精准的控制电机的转动,实现非常精准的定位。
一、伺服电机分类1、直流伺服结构简单控制容易。
但从实际运行考虑,直流伺服电动机引入了机械换向装置,成本高,故障多,维护困难,经常因碳刷产生的火花影响生产,会产生电磁干扰。
而且碳刷需要维护更换。
机械换向器的换向能力,也限制了电动机的容量和速度。
2、交流伺服分为永磁同步伺服电机和异步伺服电机。
目前运动控制基本都用同步电机。
永磁同步伺服电机内部的转子是永磁铁,驱动器控制的U/V/W 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度(线数)。
特点如下:1、控制速度非常快,从启动到额定转速只需几毫秒;而相同情况下异步电机却需要几秒钟。
图解伺服电机选型实例

伺服电机计算选择应用实例1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。
例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgfFc :由切削力引起的反推力(kgf )=100 kgfFcf :由切削力矩引起的滑动表面上工作台受到的力(kgf )=30kgfZ1/Z2: 变速比=1/1例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mmP:节距=8 mm例:电机轴的运行规格 Ta :加速力矩(kgf.cm )Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2)Jl:负载惯量(kgf.cm.sec 2)ks :伺服的位置回路增益(sec -1)=30 sec -11.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出:Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mmTf:滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量,摩擦系数。
若坐标轴是垂直轴,F 值还与平衡锤有关。
对于水平工作台,F 值可按下列公式计算: 不切削时:F = μ(W+fg )例如:F ×L 2πηF=0.05×(1000+50)=52.5 (kgf)Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm)= 0.9(Nm)切削时:F = Fc+μ(W+fg+Fcf) 例如:F=100+0.05×(1000+50+30)=154(kgf)Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm)=2.1(Nm)为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时应大于0.9(Nm ),最高转速应高于3000(min -1)。
永宏伺服选型表
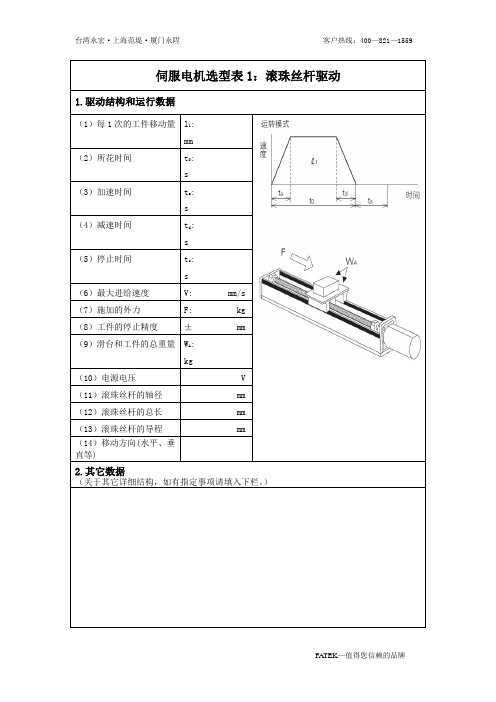
伺服电机选型表1:滚珠丝杆驱动1.驱动结构和运行数据(1)每1次的工件移动量l1:mm(2)所花时间t0:s(3)加速时间t a:s(4)减速时间t d:s(5)停止时间t s:s(6)最大进给速度V: mm/s(7)施加的外力F: kg(8)工件的停止精度± mm(9)滑台和工件的总重量W A:kg(10)电源电压 V(11)滚珠丝杆的轴径 mm(12)滚珠丝杆的总长 mm(13)滚珠丝杆的导程 mm(14)移动方向(水平、垂直等)2.其它数据(关于其它详细结构,如有指定事项请填入下栏。
)公司名称:公司地址:姓名:电话:传真:伺服电机选型表2:同步齿形带+滚珠丝杆驱动1.驱动结构和运行数据(1)每1次的工件移动量l1: mm (电机驱动侧带轮)(被动侧带轮)(2)所花时间t0:s (15)带轮直径D1: mm D2: mm (3)加速时间t a: s (16)带轮重量W1: mm W2: mm (4)减速时间t d: s (17)带轮宽度L1: mm (5)停止时间t s: s (18)带轮材质(6)最大进给速度V: mm/s (19)皮带重量W M: kg (7)施加的外力F: kg(8)工件的停止精度± mm(9)滑台和工件的总重量W A: kg(10)电源电压 V(11)滚珠丝杆的轴径 mm(12)滚珠丝杆的总长 mm(13)滚珠丝杆的导程 mm(14)移动方向(水平、垂直等)2.其它数据(关于其它详细结构,如有指定事项请填入下栏。
)公司名称:公司地址:姓名:电话:传真:伺服电机选型表3:皮带驱动1.驱动结构和运行数据(1)每1次的工件移动量l1: mm (15)带轮宽度L1: kg (2)所花时间t0:s (16)带轮材质(3)加速时间t a: s(4)减速时间t d: s(5)停止时间t s: s(6)最大进给速度V: mm/s(7)施加的外力F: kg(8)工件的停止精度± mm(9)工件的总重量W A: kg(10)电源电压 V(11)皮带重量W M: kg(12)驱动轮直径D1: mm(13)驱动轮总重量W1: kg(14)移动方向(水平、垂直等)2.其它数据(关于其它详细结构,如有指定事项请填入下栏。
伺服电机选型表格最新
22
110
22
110
22
110
24
110
24
110
35
114.3
35
114.3
35
114.3
35
114.3
22
110
22
110
35
114.3
35
114.3
35
114.3
35
114.3
22
110
22
110
22
110
22
110
35
114.3
35
114.3
35
114.3
35
114.3
35
114.3
35
114.3
0.64
1.91
11
50
0.64
1.91
11
50
0.64
1.91
11
50
1.3
3.8
14
50
1.3
3.8
14
50
1.3
3.8
14
50
1.3
3.8
14
50
2.4
7.1
19
70
2.4
7.1
19
70
0.64
1.91
11
50
0.64
1.91
11
50
0.64
1.91
11
50
0.64
1.91
11
50
1.3
3.8
12.7
38.2
24
110
12.7
38.2
24
110
15.9
汇川技术IS 系列伺服选型手册

深圳市汇川技术股份有限公司Shenzhen lnovance Technology Co., Ltd.地址:深圳市宝安区宝城70区留仙二路鸿威工业区E栋 总机:(0755)2979 9595传真:(0755)2961 9897 客服:400-777-1260 苏州汇川技术有限公司Suzhou lnovance Technology Co., Ltd.地址:苏州市吴中区越溪友翔路16号 总机:(0512)6637 6666 传真:(0512)6285 6720 客服:400-777-1260 IS620系列伺服本公司通过ISO9001TUV Rheinland Group销售服务联络地址V5.1进取 永不止步Forward, Always Progressing变频器 | 伺服系统 | PLC | 机器人 | 轨道交通 | 新能源巴西长春汇通光电技术有限公司杭州汇坤控制技术有限公司欧洲技术中心汇川技术(印度)有限公司服务网络公司总部设在深圳,同时在苏州、香港、杭州等地建立多家子公司 覆盖全国的67个办事处超过400位一线销售及服务人员 240家授权代理商 128家全国联保中心 8个库存中心保证了响应客户需求的及时性。
汇川技术伺服驱动系统平台公司简介深圳市汇川技术股份有限公司(300124)专注于工业自动化驱动与控制产品的研发、生产和销售,定位服务于中高端设备制造商,以拥有自主知识产权的工业自动化控制技术为基础,以快速为客户提供个性化的解决方案为主要经营模式,实现企业价值与客户价值共同成长。
主要产品有低压变频器、高压变频器、一体化及专机、伺服系统、PLC、HMI、永磁同步电机、电动汽车电机控制器、轨道交通牵引系统等;重点布局智能制造、新能源、工业互联网三大领域,产品广泛应用于电梯、起重、机床、金属制品、电线电缆、塑胶、印刷包装、纺织化纤、建材、冶金、煤矿、市政、汽车、轨道交通等行业。
公司在低压变频器市场的占有率在国产品牌厂商中排名第一,其中一体化及专机产品在多个细分行业处于业内首创或领先地位。
伺服电机简易选型表格V2.0
5.39
6000
1.7
3.18
6000
1.87 (3.12)
3.18
6000
1.87 (3.12)
3.18
3000
19.3 (21.8)
8.34
3000
19.3 (21.8)
8.34
5000
2.46 (3.71)
4.9
பைடு நூலகம்5000
2.46 (3.71)
4.9
13.5 13.5 9.54 9.54 9.54 20.85 20.85 14.7 14.7
所选电机 额定转速 所选电机 转子惯量 所选电机 额定扭矩 所选电机 最大扭矩
加速转矩 中间量 匀速转矩
减速转矩
计算结果
折算后所需电机转 速 折算后总的负载惯 量 折算后总的有效扭 矩 折算后总的最大扭 矩
所选电机额定转速 所选电机转子惯量 所选电机额定扭矩 所选电机最大扭矩
加速转矩 中间量 匀速转矩
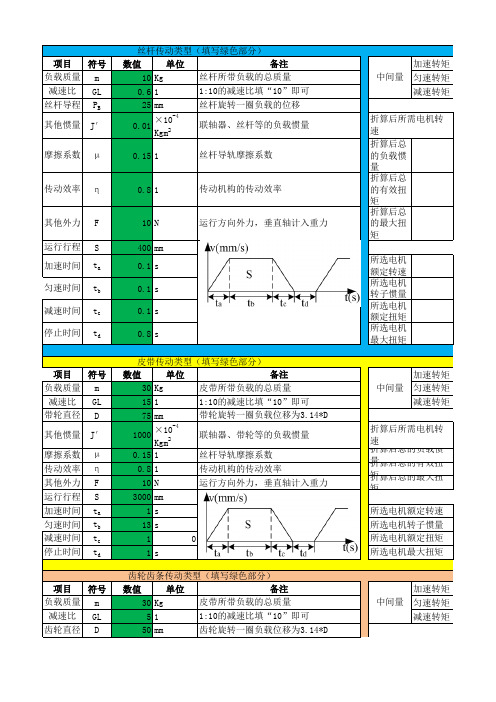
ρ
7900 Kg/m3
J
1.514806
×104Kgm2
图示及带轮惯量计算
带轮惯量计算(填写绿色部分)
外径 内径 密度 厚度 惯量
D
75 mm
d
0 mm
ρ
2700 Kg/m3
L J
10 0.838704
m×m104Kgm2
图示及齿轮惯量计算
n
260.435361 rpm
JL Trms
7.5004 0.40620127
10 N
运行方向外力,垂直轴计入重力
3000 mm
1s
13 s
1
0
1s
齿轮齿条传动类型(填写绿色部分)
安川伺服5系选型样本

SGMJV
系列 伺服电机 SGMJV 型
- 01 A D A 2 1
第 1+2 位 第 3 位 第 4 位 第 5 位 第 6 位 第 7 位
第 1+2 位 额定输出
记号 A5 01 02 04 08
50W 100W 200W 400W 750W
规格
第 3 位 电源பைடு நூலகம்压
记号 A AC200V
规格
第 4 位 串行编码器
2)
●带油封
φ4I )
φ φ I
)
型号 SGMJV-
A5A □ AB1 (A5A □ ABC)
01A □ AB1 (01A □ ABC)
带双面平面座时的尺寸 mm
QH
S
H1
H2
15
8
7.5
7.5
15
8
7.5
7.5
( 注 ) ( ) 内的数值是带制动器电机的型号。
ෳᎳ
L
LL
LM
A5A □ A21 (A5A □ A2C)
A5A □ A61 (A5A □ A6C)
94 (139)
69 (114)
37
A5A □ A81 (A5A □ A8C)
01A □ A21 (01A □ A2C)
01A □ A61 (01A □ A6C)
107.5 (152.5)
82.5 (127.5)
04A 400 1.27 4.46 2.7 9.3
0.512 0.442 (0.506) 36.5 28800 2R8
08A 750 2.39 8.36 4.7 16.9
0.544 1.57 (1.74) 36.3 15200 5R5
华大电机_ST系列伺服电机选型资料(最新)_全中文

3
130STM15015 2.3 15 1500 9.5
3.24×103 1.83 5.21 1.58 67.81 0.47 2.45 28.5 45.0
0.82×103 2.07 3.88 0.83 34.51 0.58 2.25 18.0 15.0 4
V
3
110STM06020 1.2 6 2000 6.0
1.0×103 1.98 4.20 1 41.87 0.66 2.77 18.0 18.0
110STM06030 1.6 6 3000 8.0
A+、B+、Z+、A、B、Z信号(复合信号)为省线式编码器输出信号。
80STM03330 1.0 3.3 3000 4.2
1.37×104 0.85
6.76 0.76 29.54 1.2 8.11 12.6 9.9
1
Z+
Z
6
9
1
3.2
返回目录
AC 电机
● 110 系列电机参数表
电机型号
1.06×103 2.28 3.99 1.28 85.12 1.18 4.7 15 15
U 2
130STM05025 1.3 5 2500 5.0
1.06×103 1.78 5.41 1 39.36 0.86 3.03 15.0 15.0 4
V
3
130STM06025 1.5 6 2500 6.0
110STM02030
功率
(Kw)
0.6
额定转矩
(Nm)
2
额定转速
(Rpm)
3000
额定电流
(A)
4.0
欧瑞传动伺服选型指导
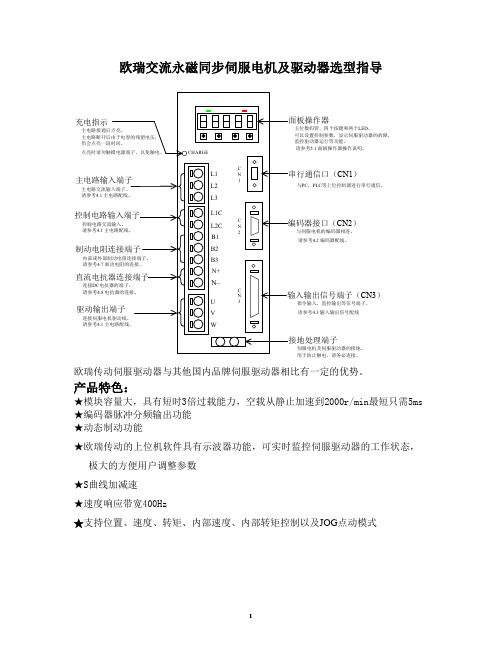
欧瑞交流永磁同步伺服电机及驱动器选型指导五位数码管,四个按键和两个LED 。
可以设置控制参数,显示伺服驱动器的故障,监控驱动器运行等功能。
请参考5.1 面板操作器操作说明。
CN1)与PC ,PLC 等上位控制器进行串行通信。
CN2)与伺服电机的编码器相连。
请参考4.2 编码器配线。
CN3)指令输入,监控输出等信号端子。
请参考4.3 输入输出信号配线 充电指示请参考4.1 请参考4.1 请参考4.1 请参考4.7 伺服电机及伺服驱动器的接地。
用于防止触电,请务必连接。
连接DC 请参考4.8欧瑞传动伺服驱动器与其他国内品牌伺服驱动器相比有一定的优势。
产品特色:★模块容量大,具有短时3倍过载能力,空载从静止加速到2000r/min 最短只需5ms ★编码器脉冲分频输出功能 ★动态制动功能★欧瑞传动的上位机软件具有示波器功能,可实时监控伺服驱动器的工作状态,极大的方便用户调整参数 ★S 曲线加减速 ★速度响应带宽400Hz★支持位置、速度、转矩、内部速度、内部转矩控制以及JOG 点动模式伺服驱动器命名规则注:N代表全功能型P 代表位置专用型(不带模拟量输入功能,即无模拟量转矩模式和模拟量速度模式)E代表简易位置控制型(在位置专用型的基础上的精简版,无动态制动功能、脉冲分频输出、故障代码输出功能)出厂默认简易位置控制型。
专用机型该位可以省略(如络筒机专用型)伺服电机命名如客户的专业水平比较高,能够直接提供伺服电机的型号以及驱动器的型号,这是最好的。
如果不能,请按以下步骤辅助客户选型。
伺服选型的步骤:1、首先应了解工况:了解用户的负载类型、确定电机法兰尺寸、转速、转矩、惯量等,这4个要素必须明确,缺一不可。
2、根据上面的4个要素选择合适的伺服电机,查说明书上的电机参数表确定电机的额定电流。
3、根据电机额定电流选择相应的伺服驱动器。
驱动器的额定电流应大于等于伺服电机的额定电流。
说明:1、转速:根据客户实际要求,满足客户的加工要求就好,同等功率下转速高的电机力矩小,如果3000r/min的电机能满足要求,不要盲目追求更高转速的电机。
伺服电机选型参数计算表

参数名称 质量 平衡质量 平衡力 丝杠直径 丝杠导程 丝杠长度 减速比 其他惯量 摩擦系数 切削力 机械效率 倾斜角 最大进给速度 最大加速度
参数名称 电机一转移动量 电机最大转速 质量折算惯量 丝杠折算惯量 其他惯量 负载惯量 摩擦扭矩 重力扭矩 空载扭矩 切削扭矩 负载扭矩 加速扭矩
值 63% 5% 5%
型参数计算表
参数
型变量表
0.51991 0
12.8436
备注 包括工作台及工作台的负载质量
丝杆转动一圈的距离 主要包括电机到丝杠间减速机构在电机轴端的折算惯量 根据实际机械情况设定,一般滚动导轨为0.05,滑动导轨为0.1 无法确定可暂设为0,电机选型时根据空载扭矩比率进行选型
基本参数
值
500
0
0
40
0.04
6
0.006
500
0.5
1
0
0.1
0.9 0 8 5
P N J11 J12 J13 J1 Tf Tg Tm Tc Tmc Tmax
单位 m/rev rev/min kgm2 kgm2 kgm2 kgm2
Nm Nm Nm Nm Nm Nm
值 0.006 1333 0.00046 0.001
型号 参数 惯量 扭矩 最大扭矩 电机最高转速
参数 负载惯量比 空载扭矩比率 负载扭矩比率 最高转速 加速扭矩
m mb Fb
d Pb
l 1/z J13
u Fc
θ V amax
单位 kg kg N mm mm/rev mm 1/ kgm2 N ° m/min m/sec2
水平轴 丝杠
伺服电机选型参数计算表
0 0.00146 0.5199
伺服电机选型手册
BONMET SA Smart & AccurateBONMET SERVO SYSTEM性能卓越●多合一控制方式利用参数切换可分别使用:①位置控制;②速度控制;③转矩控制;④JOG控制;⑤点对点控制。
●单轴定位功能SA系列伺服驱动器内置了16节点的单轴定位功能,用户可以通过伺服驱动器的RS-232通讯接口直接与触摸屏连接,从而省却了中间的PLC单元。
●伺服系统分析功能SA型伺服驱动器专用计算机软件Servofly,能对所有参数进行编辑、传送、比较以及初始化,监控所有信号、报警、系统状态等,功能强大,操作便捷。
种类齐全●与机器匹配的伺服电机种类齐全BONMET伺服电机现在拥有SM系列、JSF系列共25种型号,适用面极为广泛,并且我们仍在不断开发新型产品。
●多种配套类型伺服驱动器SA型伺服驱动器现已涵盖0.4KW至5.5KW的多种类型驱动器,广泛运用于各种工业环境。
质量保证●伺服电机选用高工作温度、高磁能积优质的永磁材料做成,使用优化的电磁参数设计,电机长期运行时仍能保持优良的工作状态,IP65的防护等级,特别适用于工业环境。
●伺服驱动器采用德国进口模块,专业的系统设计,先进的PID控制算法,能与电机参数实现无缝联接,使产品性能达到最佳效果。
●适配类型●型号说明●SA系列伺服电机●JSF系列伺服电机●伺服驱动器规格●伺服驱动器连接图●控制软件●伺服产品选件Contents●SM系列伺服电机型号说明SM 110 050 30 L F B Z1 2 3 4 5 6 7 81:表示电机是正弦波驱动的永磁同步交流伺服电机。
2:表示电机外径,单位:mm。
3:表示电机零速转矩,其值为三位数×0.1,单位:Nm。
4:表示电机额定转速,其值为二位数×100,单位:rpm。
5:表示电机适配的驱动器工作电压,L—AC220V,H—AC380V。
6:表示反馈元件的规格,F—复合式增量编码器(2500 C/T);F1—省线式增量编码器;R—1对极旋转变压器。