单片机控制步进电机程序及流程图
大学毕业设计 C51程序控制步进电机

题目:简易步进电机控制步进电机控制摘要:本设计采用ATMEL公司DIP-40封装的AT89S52单片机实现对四相步进电机的手动和按键控制。
由单片机产生的脉冲信号经过分配后分解出对应的四相脉冲,分解出的四相脉冲经驱动电路功率放大后驱动步进电机的转动。
转速的调节和状态的改变由按键进行选择,此过程由程序直接进行控制。
通过键盘扫描把选择的信息反馈给单片机,单片机根据反馈信息做出相应的判断并改变输出脉冲的频率或转动状态信号。
电机转动的不同状态由液晶LCD1602显示出来。
而设计的扩展部分可以通过红外信号的发射由另一块单片机和红外线LED完成,用红外万能接收头接收红外信号,可以实现对电机的控制进行红外遥控。
关键字:四相步进电机单片机功率放大 LCD1602步进电机控制 (1)摘要 (1)关键字 (1)前言 (3)1系统总体方案设计及硬件设计 (4)1.1步进电机 (4)1.1.1 步进电机的种类 (4)1.1.2 步进电机的特点 (4)1.1.3 步进电机的原理 (5)1.2 控制系统电路设计 (7)1.3 液晶显示LCD1602 (7)1.4 AT89S52核心部件及系统SCH原理图 (9)1.5 LN2003A驱动 (10)2软件设计及调试 (13)2.1程序流程 (13)2.2软件设计及调试 (14)3 扩展功能说明 (15)4设计总结 (16)5 设计源程序 (16)6 附录 (21)参考文献 (22)附2:系统原理图及实物图 (23)步进电机广泛应用于对精度要求比较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门控制器等。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
分散器件组成的环形脉冲分配器体积比较大,同时由于分散器件的延时,其可靠性大大降低;软件环形分配器要占用主机的运行时间,降低了速度;专用集成芯片环形脉冲分配器集成度高、可靠性好,但其适应性受到限制,同时开发周期长、需求费用较高。
单片机与步进电机细分控制

单片机与步进电机细分控制
1
步进是纯粹的数字控制电动机,它将电脉冲信号改变为角位移,即给一个脉冲,步进电机就转一个角度,因此十分合适控制,在非超载的状况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变幻的影响,电机则转过一个步距角,同时步进电机惟独周期性的无累积误差,精度高。
步进电动机有如下特点:
1)步进电动机的角位移与输入脉冲数严格成正比。
因此,当它转一圈后,没有累计误差,具有良好的尾随性。
2)由步进电动机与驱动组成的开环数控系统,既容易、便宜,又十分牢靠,同时,它也可以与角度反馈环节组成高性能的闭环数控系统。
3)步进电动机的动态响应快,易于启停、正反转及变速。
4)速度可在相当宽的范围内平稳调节,低速下仍能获得较大转距,因此普通可以不用减速器而挺直驱动负载。
5)步进电机只能通过脉冲电源供电才干运行,不能挺直用法沟通电源和直流电源。
6)步进电机存在振荡和失步现象,必需对控制系统和机械负载实行相应措施。
步进电机具有和机械结构容易的优点,图1是四相六线制步进电机原理图,这类步进电机既可作为四相电机用法,也可以做为两相电机用法,用法灵便,因此应用广泛。
步进电机有两种工作方式:整步方式和半步方式。
以步进角1.8度四相混合式步进电机为例,在整步方式下,步进电机每接收一个脉冲,旋转1.8度,旋转一周,则需要200个脉冲,在半步方式下,步进电机每接收一个脉冲,旋转0.9度,旋转一周,则需要400个脉冲。
控制步进电机旋转必需按一定时序对步进电机引线输入脉冲,以上述四
第1页共4页。
c语言实现单片机控制步进电机加减速源程序
C 语言实现单片机控制步进电机加减速源程序1. 引言在现代工业控制系统中,步进电机作为一种常见的执行元件,广泛应用于各种自动化设备中。
而作为一种常见的嵌入式软件开发语言,C 语言在单片机控制步进电机的加减速过程中具有重要的作用。
本文将从单片机控制步进电机的加减速原理入手,结合 C 语言的编程技巧,介绍如何实现单片机控制步进电机的加减速源程序。
2. 单片机控制步进电机的加减速原理步进电机是一种能够精确控制角度的电机,它通过控制每个步骤的脉冲数来实现旋转。
在单片机控制步进电机的加减速过程中,需要考虑步进电机的加速阶段、匀速阶段和减速阶段。
在加速阶段,需要逐渐增加脉冲的频率,使步进电机的转速逐渐增加;在匀速阶段,需要保持恒定的脉冲频率,使步进电机以匀速旋转;在减速阶段,需要逐渐减小脉冲的频率,使步进电机的转速逐渐减小。
这一过程需要通过单片机的定时器和输出控制来实现。
3. C 语言实现步进电机加减速的源程序在 C 语言中,可以通过操作单片机的 GPIO 来控制步进电机的旋转。
在编写源程序时,需要使用单片机的定时器模块来生成脉冲信号,以控制步进电机的旋转角度和速度。
以下是一个简单的 C 语言源程序,用于实现步进电机的加减速控制:```c#include <reg52.h>void main() {// 初始化定时器// 设置脉冲频率,控制步进电机的加减速过程// 控制步进电机的方向// 控制步进电机的启停}```4. 总结与回顾通过本文的介绍,我们了解了单片机控制步进电机的加减速原理和 C 语言实现步进电机加减速源程序的基本思路。
掌握这些知识之后,我们可以更灵活地应用在实际的嵌入式系统开发中。
在实际项目中,我们还可以根据具体的步进电机型号和控制要求,进一步优化 C 语言源程序,实现更加精准和稳定的步进电机控制。
希望本文能为读者在单片机控制步进电机方面的学习和应用提供一定的帮助。
5. 个人观点与理解在我看来,掌握 C 语言实现单片机控制步进电机加减速源程序的技术是非常重要的。
单片机课程设计-正反转可控的步进电机

正反转可控的步进电机1 引言本课程设计目的是为了进一步掌握单片机系统,加强对系统设计和应用能力的培养而开设的综合设计训练环节。
本系统用51单片机和ULN2003A电机驱动芯片并加入控制按钮来实现步进电机的正、反转控制。
2 设计方案及原理步进电机可以对旋转角度和转动速度进行高精度的控制。
作为控制执行部件,广泛应用于自动控制和精密仪器等领域。
例如在仪器仪表、机床设备以及计算机的外围设备中(如打印机和绘图仪),常有对精确的、可控制的回转源的需要。
在这种情况下,使用步进电机最为理想。
2.1 步进电机控制步进电机两个相邻磁极之间的夹角为60°,线圈绕过相对的两个磁极构成一相。
此外各磁极上还有5个分布均匀的锯形小齿。
电机转子上没有绕组。
当某相绕组通电时,响应的两个磁极就分别形成N-S极,产生磁场,并与转子形成磁路。
如果这是定子的小齿与转子的小齿没有对齐,则在磁场的作用下,转子将转动一定的角度,使转子齿与定子齿对齐,从而使步进电机向前“走”一步。
如果通过单片机按顺序给绕组施加有序的脉冲电流,就可以控制电机的转动,从而进行了数字到角度的转换。
转动的角度大小与施加的脉冲数成正比,转动的速度与脉冲频率成正比,而转动方向则与脉冲的顺序有关。
2.2 步进电机驱动方式步进电机常用的驱动方式是全电压驱动,即在电机移步与锁步时都加载额定电压。
为防止电机过流及改善驱动特性需加限流电阻。
由于步进电机锁步时,限流电阻要消耗掉大量的功率。
因此,限流电阻要有较大功率容量,并且开关管也要有较高的负载能力。
步进电机也可以使用软件方法,即使用单片机实现,这样不但简化了电路,同时降低了成本。
使用单片机以软件方式驱动步进电机,不但可以通过编程方法在一定范围之内自由的设定步进电机的转速,往返转动的角度以及转动次数等;还可以方便灵活的控制步进电机的运行状态,以满足不同用户的需求。
因此常把单片机步进电机控制电路称之为可编程步进电机控制驱动器。
单片机实验P3.3输入、P1口输出和步进电机控制实验

单⽚机实验P3.3输⼊、P1⼝输出和步进电机控制实验南昌航空⼤学实验报告⼆0⼀⼀年⼗⽉⼀⼗七⽇课程名称:单⽚微型机实验名称:P3.3输⼊、P1⼝输出和步进电机控制实验班级: 080611 学⽣姓名:学号: 08061108 指导教师评定:签名:⼀、实验⽬的1、掌握P3⼝、P1⼝简单使⽤;2、学习延时程序的编写和使⽤;3、了解步进电机控制的基本原理;4、掌握步进电机转动编程⽅法。
⼆、实验内容及要求1、P3.3输⼊、P1⼝输出实验1)P3.3⼝做输⼊⼝,外接⼀脉冲,每输⼊⼀个脉冲,P1⼝按⼗六进制加⼀。
P1⼝做输出⼝,编写程序,使P1⼝接的8个发光⼆极管L1—L8按16进制加⼀⽅式点亮发光⼆极管。
2)P1⼝是准双向⼝,它作为输出⼝时与⼀般的双向⼝使⽤⽅法相同,由准双向⼝结构可知:当P1⼝作为输⼊⼝时,必须先对它置⾼电平,使内部MOS管截⽌,因内部上拉电阻是20KΩ—40KΩ,故不会对外部输⼊产⽣影响。
若不先对它置⾼,且原来是低电平,则MOS管导通,读⼊的数据是不正确的。
3)延时⼦程序的延时计算问题。
对于延时程序:DELAY :MOV R6, #00HDELAY1:MOV R7, #80HDJNZ R7, $DJNZ R6, DELAY1查指令表可知MOV、DJNZ指令均需⽤两个机器周期,⽽⼀个机器周期时间长度为12/ 6.0MHZ,所以该段指令执⾏时间为:((80+1)×256+1)×2×(12÷6000000)=132.1ms。
图1 P3.3输⼊、P1图2 实验电路原理图2、步进电机控制实验1)从键盘上输⼊正、反转命令,转速参数和转动步数显⽰在显⽰器上,CPU再读取显⽰器上显⽰的正、反转命令,转速级数(16级)和转动步数后执⾏。
转动步数减为零时停⽌转动。
2)步进电机驱动原理是通过对它每相线圈中的电流和顺序切换来使电机作步进式旋转。
驱动电路由脉冲信号来控制,所以调节脉冲信号的频率便可改变步进电机的转速,微电脑控制步进电机最适合。
步进电机控制程序(c语言51单片机)
// pri_dj = Pme );
if( i == set_pwm_width ) { P1 = 0xff; i = 0; one _round_flg = 0; while ( !one_round_flg & key_puse );}
if(!key_puse) { delay(4ms); if(!key_puse) break; }
while ( key_puse & key_clear ); delay ( 8ms );
if ( !key_clear ) { round_num = 0; display(); }
if ( !key_puse ) break; }
while( !key_puse ); delay(8ms);
while( !key_puse ); }
set_display_num(); for(i = 0; i < LEDLen ; i ++){
P0 = 0xf0; P0 = P0 | LEDBuf[i] ; if(i==0) led_1000 = 0; //P0^4 if(i==1) led_100 = 0; //P0^5 if(i==2) led_10 = 0; //P0^6 if(i==3) led_1 = 0; //P0^7
delay ( 1ms ); tmp = (~(P2 | 0xF0)); P2 = 0x7F; // 0111 1111
delay ( 1ms ); tmp = (~(P2 | 0xF0)) * 10 + tmp; set_round_num = set_round_num + tmp * 100; set_round_num = set_round_num * Chilun_Num;
合泰单片机控制5线4相步进电机控制程序

合泰单片机控制5线4相步进电机控制程序;步进电机的驱动信号必须为脉冲信号!!! 转动的速度和脉冲的频率成正比!!!; 28BYJ48 步进电机步进角为 5.625 度; A 组线圈对应PC.0; B 组线圈对应PC.1; C 组线圈对应PC.2; D 组线圈对应PC.3; 正转次序: AB 组--BC 组--CD 组--DA 组(即一个脉冲,正转5.625 度); 完整的源程序下载:51hei/f/htbjdj.rarinclude HT66F50.incORG0000HJMPA1ORG0014H ;多功能中断入口地址JMPZD1ORG002DHQ1:DC03H; 0ABDC06H; 1BCDC0CH; 2CDDC09H; 3DAA1: MOVA,08H;跟CP1C 寄存器设置要求选择数据MOVCP1C,A;设置PC 口为I/0 口而不是中断口CLRPCC;设置pc 口为输出口MOVA,0;设置初始脉冲MOV[80H],A;MOVA,00000000B;设置TM2 计数时钟位为fSYS/4MOVTM2C0,AMOVA,11000001B ;设置TM2 中断为定时/计数模式选择比较器A 匹配MOVTM2C1,AMOVA,LOW 5000;设置中断时间为5000 个时钟周期MOVTM2AL,A;低8 位MOVA,HIGH 5000;设置中断时间为5000 个时钟周期MOVTM2AH,A;高8 位不能少于3500 个时钟周期否则无法启动CLRMF0F;清多功能中断0 标志CLRT2AF;清定时器2 较器A 中断标志SETMF0E;使能多功能0 中断SETT2AE;使能定时器2 较器A 中断SETEMI;使能总中断SETT2ON;开始计数JMP$;;*******************************************************;中断服务子程序;*******************************************************ZD1:MOV[0F0H],A;压栈ACC 到0F0HMOVA,STATUS;MOV[0F1H],A;压栈status 标志寄存器。
步进电机XY坐标控制

题毕业论文毕业设计报告目:基于单片机的步进电机控制学号姓名指导教师完成日期年摘要月步进电机是一种纯粹的数字控制电机,是将电脉冲信号转变为角位移或线位移的开环控制元件。
本文应用单片机AT89C51 和脉冲分配器PMM8713,步进电机驱动器,光电隔离器4N25 等,构建了步进电机控制器和驱动器为一体的步进电机控制系统。
通过AT89C51 和脉冲分配器PMM8713 完成步进电机的各种运行控制方式,实现步进电机在3 相 6 拍的工作方式下的正反转控制和加减速控制。
并通过步进电机丝杠连动,带动XY 工作台的直线运动,实现从起点 A 点到预定点 B 点的位移控制。
整个系统采用模块化设计,结构简单,可靠,通过人机交互换接口可实现各功能设置,操作简单,易于掌握。
该系统可应用于步进电机在机电一体化控制等大多数场合。
实践证明,基于单片机控制的步进电机比传统的步进控制器具有更好的性能,更加简单、方便、可靠。
本设计的主要研究对象就是开环伺服系统中最常用的执行器件——步进电机。
关键词: 步进电机,单片机,正反转控制,加减速控制,XY 工作台目录第一章绪论 (3)1.1 步进电机及其发展 (3)1.2 步进电机在我国的发展应用及前景 (1)1.3 本文研究内容 (2)第二章步进电机的分类、结构、工作原理及特性 (2)2.1 步进电机的概念 (2)2.2 步进电机的特点 (3)2.3 步进电机的分类 (3)2.4 步进电机的结构及工作原理 (4)2.5 步进电机的常用术语 (7)2.6 步进电机的振荡和失步 (7)2.7 阻尼方法 (8)2.8 步进电机的矩频特性 (9)第三章步进电机的驱动 (9)3.1 单电压功率驱动接口 (10)3.2 双电压功率驱动接口 (10)3.3 高低压功率驱动接口 (11)第四章步进电机的单片机控制 (12)4.1 步进电机控制系统组成 (12)4.2 步进电机控制系统原理 (13)4.3 脉冲分配 (13)4.4 步进电机与微型机的接口电路 (15)第五章步进电机的运行控制 (16)5.1 步进电机的速度控制 (16)5.2 步进电机的位置控制 (17)5.3 步进电机的加减速控制 (17)第六章步进电机的XY工作台 (19)6.1 设计目标 (19)6.2 X、Y工作台的传动方式 (20)6.3 程序框图 (22)6.4 汇编程序 (24)设计总结 (26)致谢 (27)参考文献 (28)光电隔离器光电耦合器(optical coupler,英文缩写为OC)亦称光耦合器,简称光耦。
单片机控制步进电机正反转
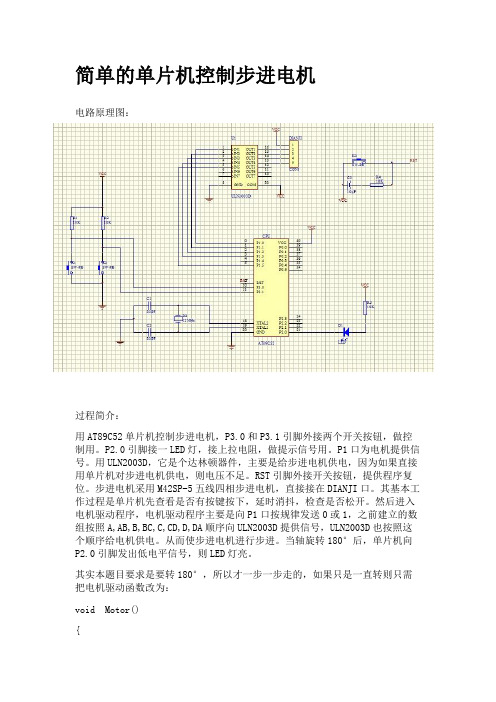
void Motor()
{
unsigned char i;
for(i=0;i<8;i++)
{
GPIO_MOTOR = FFW[i];
Delay(Speed);//调节转速
}
}
当然,这种控制个人觉得是不太精确的,如果只是让一个轴转动180度,则用步进电机外接减速箱,然后接一轴,让电机转一圈,轴转10度或20度,则控制会更精准。
unsigned char code FFZ[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //正转顺序
unsigned char Direction;
void Delay(unsigned int t);
void Motor();
void main()
Delay(10);
GPIO_MOTOR = FFZ[3];
Delay(10);
GPIO_MOTOR = FFZ[4];
Delay(10);
GPIO_MOTOR = FFZ[5];
Delay(10);
GPIO_MOTOR = FFZ[6];
Delay(15);
GPIO_MOTOR = FFZ[7];
{
unsigned char i;
while(1)
{
if(K1==0)//检测按键K1是否按下
{
Delay(10);//消除抖动
if(K1==0)
{
Direction=1;}while((i<200)&&(K1==0))//检测按键是否松开
8255端口控制步进电机控制框图和程序

9.4工程应用9.4.1项目1:用8255A端口控制步进电机1.项目要求与目的(1)项目要求:根据开关的状态,用8255端口控制步进电机,编写程序输出脉冲序列到8255的PA口,控制步进电机正转、反转,加速,减速。
(2)项目目的:●了解步进电机控制的基本原理。
●掌握控制步进电机转动的编程方法。
●了解单片机控制外部设备的常用电路。
2.项目电路连接与说明(1)项目电路连接:8255的片选CS孔用导线接至译码处200H~207H插孔,8255的PA0-PA3用导线接至步进电机的A、B、C和D,PB0-PB3用导线接至开关K0、K1和K2。
(2)项目说明:步进电机驱动原理是通过对每相线圈中的电流的顺序切换来使电机作步进式旋转。
切换是通过8255输出脉冲信号来实现的。
所以调节脉冲信号的频率便可以改变步进电机的转速,改变各相脉冲的先后顺序,可以改变电机的旋转方向。
步进电机的转速应由慢到快逐步加速。
步进电机驱动方式可以采用双四拍(AB→BC→CD→DA→AB)方式,也可以采用单四拍(A→B→C→D→A)方式,或单、双八拍(A→AB→B→BC→C→CD→D→DA→A)方式。
实际控制时公共端是接在+5V上的,所以实际控制脉冲是低有效。
8255的PA口输出的脉冲信号经(MC1413或ULN2003A)倒相驱动后,向步进电机输出脉冲信号序列。
当开关K0=0时,步进电机驱动方式采用单/双八拍工作方式,当开关K1=0时,步进电机驱动方式采用双四拍工作方式,当开关K2=0时,步进电机驱动方式采用单四拍反转工作方式。
3.项目电路原理框图项目电路原理框图如图7-1所示。
电路由8255A芯片、驱动和步进电机等组成。
图7-1 用8255A端口控制步进电机电路框图4.项目程序设计(1)程序流程图用8255A端口控制步进电机程序流程图如图7-2所示。
图7-2 程序流程图(2)程序清单用8255A端口控制步进电机程序清单如下所示。
ASTEP EQU 01HBSTEP EQU 02HCSTEP EQU 04HDSTEP EQU 08HCODE SEGMENTASSUME CS:CODESTART :MOV DX, 203H ;8255控制口地址MOV AL, 82H ;PA口输出,B口输入OUT DX, AL ;写控制字K0:MOV DX, 200H ;PA口地址MOV AL,0 ;输出低电平OUT DX,AL ;电机停止转动MOV DX,201H ;PB口地址IN AL,DX ;读开关状态TEST AL,01H ;PB0位(K0=0吗?)JNZ K1 ;不是零转K1JMP STEP8 是零转单/双八拍工作方式K1: IN AL,DX ;读开关状态TEST AL,02H ;PB1位(K1=0吗?)JNZ K2 ;不是零转K2JMP STEP4 ;是零转双四拍工作方式K2:IN AL,DX ;读开关状态TEST AL,04H ;PB2位(K2=0吗?)JZ STEP41 ;是零转单四拍反转工作方式JMP K0 ;循环; 单/双八拍工作方式:A→AB→B→BC→C→CD→D→DA→A STEP8:MOV BX,9000H;设置初始延时时间MOV DX, 200H;PA口地址MOV AL,ASTEPOUT DX,ALCALL DELAYMOV AL,ASTEP+BSTEPOUT DX,ALCALL DELAYMOV AL,BSTEPOUT DX,ALCALL DELAYMOV AL,BSTEP+CSTEPOUT DX,ALCALL DELAYMOV AL,CSTEPOUT DX,ALCALL DELAYMOV AL,CSTEP+DSTEPOUT DX,ALCALL DELAYMOV AL,DSTEPOUT DX,ALCALL DELAYMOV AL,DSTEP+ASTEPOUT DX,ALCALL DELAYJMP K0; 双四拍工作方式:AB→BC→CD→DA→ABSTEP4:MOV BX,5000H;设置延时时间MOV DX, 200H;PA口地址MOV AL,ASTEP+BSTEP;PA0PA1(AB相)输出高电平 OUT DX,ALCALL DELAY ;调延时MOV AL,BSTEP+CSTEP ;BC输出高电平OUT DX,ALCALL DELAY ;调延时MOV AL,CSTEP+DSTEP;CD输出高电平OUT DX,ALCALL DELAY ;调延时MOV AL,DSTEP+ASTEP;DA输出高电平OUT DX,ALCALL DELAY ;调延时JMP K0; 单四拍反转工作方式: D→C→B→A→DSTEP41:MOV BX,1000H;设置延时时间MOV DX,200H;PA口地址MOV AL,DSTEP; D输出高电平OUT DX,ALCALL DELAY;调延时MOV AL,CSTEP; C输出高电平OUT DX,ALCALL DELAY;调延时MOV AL,BSTEP; B输出高电平OUT DX,ALCALL DELAY;调延时MOV AL,ASTEP; A输出高电平OUT DX,ALCALL DELAY;调延时JMP K0DELAY PROC NEAR ;延时子程序PUSH CXMOV CX,BXDD1:NOPLOOP DD1POP CXRETDELAY ENDP ; 延时子程序结束CODE ENDS ;代码段结束END START。
单片机控制伺服电机设计(带单片机程序及电路)
程设计说明书题目:基于单片机的步进电机控制系统设计课程:机电一体化系统设计姓名:马福德学号:0804705030指导教师:段广云、俞学兰专业年级:机械设计制造及其自动化(机械电子工程方向)2008级所在院系:机械工程学院完成日期: 2011年7月 10 日答辩日期: 2011年7月 11 日摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
本设计是采用AT89C51单片机对步进电机的控制,通过IO口输出的时序方波作为步进电机的控制信号,信号经过芯片AT6560AHQ驱动步进电机;同时,用 4个按键来对电机的状态进行控制,并用数码管动态显示电机的转速。
系统由硬件设计和软件设计两部分组成。
其中,硬件设计包括AT89C51单片机的最小系统、电源模块、键盘控制模块、步进电机驱动模块、数码显示模块、测速模块(含霍尔片UGN3020)6个功能模块的设计,以及各模块在电路板上的有机结合而实现。
软件设计包括键盘控制、步进电机脉冲、数码管动态显示以及转速信号采集模块的控制程序,最终实现对步进电机转动方向及转动速度的控制,并将步进电机的转动速度动态显示在LED数码管上,对速度进行实时监控显示。
软件采用在Keil软件环境下编辑的C语言。
本系统具有智能性、实用性及可靠性的特点。
关键词:步进电机 ,单片机 ,电脉冲信号, 角位移, 转速控制,方向控制ABSTRACTWith the development of microelectronics and computer technology, increasing demand for stepper motor, which is widely used in printers, electronic toys and consumer products such as CNC machine tools, industrial robots, medical equipment and electrical products, and its various national fields are applied. Of stepper motor control system to improve the control accuracy and response speed, energy conservation and so important.Stepper motor is an electric pulse signals can convert the angular displacementor linear displacement of the mechanical and electrical components, stepper motor control system consists of stepper controller, stepper motor power amplifier and so on. Use MCU control, the stepper controller instead of using software to make simple circuit, low cost, reliability greatly increased. Software programming flexibility to produce different types of stepping motor excitation sequence to control the operation of the various stepper motor modeThis design is used AT89C51 of Stepping motor control, through the IO port as a square wave output of the timing of step motor control signal, the signal through the ULN2003 driver chip stepper motor; the same time, with four buttons to the status of the motor control, and dynamic display with digital control motor speed.System consists of hardware and software design of two parts. Among them, the hardware design, including minimum system AT89C51 microcontroller, power supply module, keyboard control module, stepper motor drive (integrated Darlington ULN2003) module, digital display (SM420361K digital control) module, speed modules (including the Hall probe UGN3020) six function modules, and each module in the circuit board to achieve the organic combination. Software design, including keyboard control, stepping motor pulse, the digital dynamic display and speed signal acquisition module, control procedures, and ultimately to the stepper motor rotation direction and rotation speed control of stepper motor rotation speed and dynamic display in the LED digital tube, real-time monitoring of the speed display. Software used in the software environment to edit Keil C language. This system has the intelligence, practicality and reliability features.Key Words: Stepping motor , MCU Pulse Signal , Angular displacement ,Speed control ,Direction control目录1 绪论 (1)1.1背景 (1)1.2设计任务及要求 (1)2 总体方案设计 (2)2.1方案设计 (2)2.2芯片选择 (2)2.2.1 CPU的芯片选择 (2)2.2.2 驱动电路的芯片选择 (3)2.2.3 测试电路的芯片选择 (6)3 系统硬件设计 (7)3.1电机驱动电路 (7)3.2测试及显示电路 (8)3.2.1 CS3020霍尔传感器测试电路 (8)3.2.2 LED数码显示管 (8)3.3电源 (9)3.4两相步进电机 (9)3.5键盘控制系统 (10)4 控制系统软件分析与设计 (11)4.1主程序流程图 (11)4.2读键盘子程序流程图 (11)4.3键盘处理子程序流程图 (12)4.4电机控制中断程序流程图 (12)4.5程序设计平台 (13)4.6源程序清单 (14)5 PCB板设计 (19)5.1设计原则 (19)5.1.1布局操作的基本原则 (19)5.1.2布线原则 (19)5.2PCB板设计方案: (20)5.3PCB板各电器元件的布局 (21)6 设计体会 (22)致谢 (23)参考文献 (24)附录 (25)A元件清单 (25)B电路PCB图 (26)C电路原理图 (26)1 绪论1.1 背景当今社会,电动机在工农业生产、人们日常生活中起着十分重要的作用。
单片机控制步进电机正反转的实际应用程序
单片机控制步进电机正反转的实际应用程序/*这是一个控制步进电机正反转的实际应用程序*//*选用的是三相步进电机驱动器,p14口线用做步进电机的脉冲控制*//*p13口线用做步进电机的方向控制。
p15,p16,p17是光耦开关量输入*//*信号端,p20,p21,p22,p23与x25045看门狗存储器相连*//*k7,k8键是设定步进电机转动速度参数的加减键*//*k9是启动运行键,按一下k9,步进电机开始运行,直到p17口线有信号输入才停止*/ /*k10是停止键,任何时候按下k10都将停止步进电机当前的运行*//*k11是步进运行键,按一下,步进电机动一下*//*k12键是反向运行键,按一下,步进电机开始反向运行,知道p15口线有信号才停止*/ /*如果p16口线有信号输入,则只有k12键才起作用,其它键都没反应。
*/START:do;$INCLUDE(REG51.DCL)DECLARE (addrl,n,I,j,ok,ds) byte; /*定义变量*/declare l(5) byte;declare (dat,data) byte at (30h);declare delay word;DECLARE ACO(11) BYTE CONSTANT (05h,9fh,23h,0bh,99h,49h,/*定义LED段码表*/ 41h,1fh,01h,09h,00h);declare si literally 'p21',sck literally 'p20'; /*X25045囗线定义*/declare so literally 'p22',cs literally 'p23';dog:procedure; /* 初始化看门狗x25045 */cs=1;call time(1);cs=0;call time(1);cs=1;end dog;run:procedure; /*步进电机运行脉冲输出程序*/if ok=1 thencall dog;do;p14=0;call time(1);p14=1;call time(1);end;end run;DISPLAY:PROCEDURE(L0,L10); /*显示子程序*/DECLARE (L0,L10) BYTE; /*定义显示二位*/n=L10;n=aco(n); /*十位数BCD码译成段码*/sbuf=n; /*十位数送164显示*/do while ti=0; /*等待发送结束*/call dog; /*看门狗定时器复位*/end;n=L0;n=aco(n);sbuf=n; /*个位数送164显示*/do while ti=0;call dog;end;end display;outbyt: procedure(da); /*向看门狗存储器写入一字节*/ declare (i,da) byte;j=da; /*将要写入的字节赋给临时变量J */do i=0 to 7; /*左移8位,送到口线si */sck=0;j=scl(j,1);si=cy;sck=1; /*每移一位数据,跟一个时钟信号*/end;end outbyt;inbyt: procedure; /* 从看门狗存储器读出一字节*/ declare (i,di) byte;j=0;do i=0 to 7;sck=1;sck=0;cy=so;j=scl(j,1); /*从看门狗存储器读出一字节送入临时变量j*/ end;dat=j;end inbyt;wrenable: procedure; /* 置看门狗写使能*/sck=0;cs=0;; /* write enable command */call outbyt(06h); /* x25045 写使能指令06h */cs=1;sck=0;end wrenable;wrdisable: procedure; /* 置看门狗写禁止*/sck=0;cs=0;; /* write disable command */call outbyt(04h);sck=0;cs=1;end wrdisable;wrregister: procedure; /* 写状态寄存器*/sck=0;cs=0;dat=01h; /* write register command */call outbyt(dat);; /* 00h--1.4S, 20h--200MS, 10h--600MS, 30h--disable Wdog */ call outbyt(00h); /* 设定看门狗定时时间*/;sck=0;cs=1;call time(200); /* wait to complete writting cycle */end wrregister;rdregister:procedure; /* 读看门狗状态寄存器*/sck=0;cs=0;; /* register read command */call outbyt(05h);call inbyt; /* status register read in <DAT> */sck=0;cs=1;end rdregister;wbyte:procedure; /* 看门狗存储器字节写入子程序*/ declare comm byte;sck=0;cs=0;comm=02h; /* 写指令02h */call outbyt(comm);call outbyt(addrl);call outbyt(dat); /* send one byte data to X25043 */cs=1;sck=0;call time(150);end wbyte;rbyte:procedure; /*看门狗存储器字节读出子程序*/declare comm byte;sck=0;cs=0;comm=03h; /* read command */call outbyt(comm);call outbyt(addrl);call inbyt; /* read one byte to <DAT> */sck=0;cs=1;end rbyte;incdata: procedure; /* 参数修改--"加"键处理子程序+ */if p10=0 then /* 如果K7键按下*/do;do while p10=0; /* 等待键松开有效*/call dog; /* 此处必需调用看门狗复位子程序("喂狗"),否则程序将被看门狗复位*/ end;data=data+1; /* 设定值+1 */if data>99 then data=1; /* 规定设定值的上限*/L(1)=data MOD 10; /*将设定值的十位数拆出来送给十位数显示变量L(1) */L(2)=data/10; /*将设定值的个位数拆出来送给个位数显示变量L(2) */call display(L(1),L(2)); /* 将改变后的设定值送164显示出来*/call time(200); /* 延时*/call dog;call time(200);call dog;call wrenable; /* 置存储器写使能*/addrl=00h; /* 置存储器地址*/dat=l(1);call wbyte; /* 将变量L(1)的值写入存储器00h位置*/call wrenable;addrl=01h;dat=l(2);call wbyte; /* 将变量L(2)的值写入存储器01h位置*/end;end incdata;decdata: PROCEDURE; /* 参数修改---"减"键处理子程序- */IF p11=0 THEN /* k8 键处理子程序*/do;do while p11=0;call dog;end;DATA=DATA-1; /* 设定值-1 */if data=0 then data=99;L(1)=data MOD 10;L(2)=data/10;call display(l(1),l(2));call dog;call time(200);call dog;call time(200);call dog;call wrenable;addrl=00h;dat=l(1);call wbyte;call wrenable;addrl=01h;dat=l(2);call wbyte;end;END decdata;starton: PROCEDURE; /* start */declare sd byte;if p12=0 THEN /* K9键处理子程序*/do;do while p12=0;call dog;end;if p17=0 then ok=0; /* 如果p17 口线上有信号输入,则运行标志置0 (停止运行)*/ p13=1; /* 置步进电机正向运转*/call time(200);call dog;do while ok=1; /* 当运行标志为1时,执行速度延时操作*/do sd= 0 to data; /* 根据设定值data的数值延时来确定步进电机运行时的脉冲给定速度*/call dog;end;end;END starton;step: PROCEDURE; /* step */declare sd byte;p13=1; /* 置步进电机正向运转*/call time(200);IF p33=0 THEN /* k11键处理子程序*/do;if p17=0 then ok=0; /* 如果p17上有信号输入,则停止运行*/do while p33=0;do sd= 0 to data; /* 调用延时,调整步进电机的运行速度*/call dog;call time(2);end;call run;call dog;end;end;ok=0;END step;back: PROCEDURE; /* 反向运行处理子程序*/declare sd byte;IF p34=0 THENdo;do while p34=0;call dog;end;if p15=0 then ok=0; /* 反向运行时,如果遇到p15上有信号输入,则停止步进电机运行*/ p13=0; /* 置步进电机反向运行*/call time(200);call dog;do while ok=1;do sd=0 to data; /*根据设定值调节步进电机的运行速度*/call dog;call time(2);end;call run;if (p15=0 or p32=0 ) then ok=0; /* p15 或p32 口线任意一个有信号输入,停止运行*/ end;end;END back;MAIN$PROGRAM: /* 初始化主程序*/ea=0; /* 关中断*/SCON=00h; /*置串口方式0 ,串行数据输出模式*/PCON=00h;tmod=11h;enable; /* 开中断(ea=1) */SCK=0;cs=1; /* 定义存储器口线初始状态*/call wrenable;call wrregister; /* 看门狗存储器初始化*/call wrenable;call dog;p2=0ffh; /* 初始化各个口线的状态*/p1=0ffh;ok=0;p14=1;p32=1;p33=1;p34=1;p13=1;ADDRL=00h; /* 上电复位后从存储器中读出设定的速度值*/CALL rbyte;l(1)=dat;addrl=01h;call rbyte;l(2)=dat;DATA=L(1)+L(2)*10; /*将读出的值合并成十进制,存入变量data中*/ /* 以下是主循环程序*/LOOP:IF p10=0 THEN CALL incdata; /* 检测各个按键是否有按下*/IF p11=0 THEN CALL decdata;if p12=0 thendo;ok=1;call starton;end;if p34=0 thendo;ok=1;call back;end;if p33=0 thendo;ok=1;call step;end;call dog;CALL DISPLAY(L(1),L(2)); /* 将设定值送164显示*/call dog;CALL TIME(100);call dog;GOTO LOOP;END START;。
汽车单片机程序设计原理步进电机控制原理
由于怠速控制阀在初始是全开状态,发动机在此状 态的设计转速要高于1200转/分,所以在发动机起动后的 暖机控制开始,单片机控制步进电机从0步开始,只可能 是正转,减小通气截面积,降低发动机转速至1200转/分。 步进电机每转动1步,单片机就累加正转步数1次;如果 反转,单片机就减少正转步数1次。
发动机受各种因素影响,怠速会有一定的波动。怠 速与目标转速的误差,允许在±20转/分以内,超过±20 转/分,单片机就调控。
(2)正常怠速控制
发动机正常运行时,按正常低怠速800转/分控制, 允 许±20转/分。
(3)发动机关闭后控制
关闭发动机后,发动机ECU(不断电)控制步进电动 机反转到怠速阀恢复到初始全开状态,为了下次起动做好 准备。
单片机控制步进电动机从初始全开状态,到正常怠速 状态,再恢复到初始全开状态,其间的步数变化都被记忆 下来;发动机关闭后,从初始全开状态正转多少步,就转 反多少步,正好回到初始全开状态。
A相、B相、C相、D相分别通电时,对应产生的磁极对是C1、 C2 、C3 、C4 。例如A相线圈通电,产生4对(8个)C1磁极。其 它线圈通电情况类似。
步进电机转动的基本原理是:按A→B→C→D→A相序依次 通电,转子正转(图中为顺时针);按A→D→C→B→A相序依 次通电,转子反转。线圈通电时间的长短决定转速,通电时间 长,转速慢,通电时间短,转速快。
怠速一般在800转/分,由于设计和制造工艺不同,不同的 辆车,怠速略有不同,应以其标明怠速数值为准。
怠速控制均采用发动机转速反馈闭环控制方式 ,即发动 机转速传感器将发动机的实际转速和目标转量,并通过执行机 构对发动机怠速转速进行校正。
图1-36为步进电机式怠速控制示意图,步进电机式怠速控制阀由步进 电机、阀杆、控制阀和阀座组成。转子的正转或反转运动经阀杆(丝杆) 转换成向前或向后的直线伸缩运动,阀杆每旋转1圈,伸缩1个螺距;控制 阀与阀杆相连,为凸圆锥状;阀座为凹圆锥状。控制阀向阀座推进,通气 横截面减小,反之,通气横截面增大,从而达到控制怠速通气量的目的。
步进电机实验报告(1)

步进电机控制实验一、实验目的步进电机作为一种数字控制电机,可以准确的控制角度和距离应用非常广泛,本实验利用SPCE061A单片机通过自己编写程序实现步进电机的控制使我们加深对步进电机的了解,同时学会使用步进电机的驱动芯片WZM-2H042M。
另外要求我们掌握单片机控制步进电机的硬件接口电路,以及熟悉步进电机的工作特性。
二、实验内容根据步进电机驱动电路,使用单片机驱动步进电机,控制步进电机正转、反转操作。
三、实验要求按实验内容编写程序,并在实验仪上调试和验证。
四、实验说明1.步进电动机有三线式、五线式、六线式三种,但其控制方式均相同,必须以脉冲电流来驱动。
若每旋转一圈以20个励磁信号来计算,则每个励磁信号前进18度,其旋转角度与脉冲数成正比,正、反转可由脉冲顺序来控制。
2.步进电动机的励磁方式可分为全部励磁及半步励磁,其中全步励磁又有1相励磁及2相励磁之分,而半步励磁又称1-2相励磁。
图为步进电动机的控制等效电路,适应控制A、B、/A、/B的励磁信号,即可控制步进电动机的转动。
每输出一个脉冲信号,步进电动机只走一步。
因此,依序不断送出脉冲信号,即可步进电动机连续转动。
a.1相励磁法:在每一瞬间只有一个线圈导通。
消耗电力小,精确度良好,但转矩小,振动较大,每送一励磁信号可走18度。
若欲以1相励磁法控制步进电动机正转,其励磁顺序如图所示。
若励磁信号反向传送,则步进电动机反转。
励磁顺序: A→B→C→D→AA B C DSTEP1 1 0 0 02 0 1 0 03 0 0 1 04 0 0 0 1b.2相励磁法:在每一瞬间会有二个线圈同时导通。
因其转矩大,振动小,故为目前使用最多的励磁方式,每送一励磁信号可走18度。
若以2相励磁法控制步进电动机正转,其励磁顺序如图所示。
若励磁信号反向传送,则步进电动机反转。
励磁顺序: AB→BC→CD→DA→ABSTEP A B C D1 1 1 0 02 0 1 1 03 0 0 1 14 1 0 0 1c.1-2相励磁法:为1相与2相轮流交替导通。
STC增强型51单片机利用PWM脉冲控制4个57步进电机的编程方法

IAP15W4K58S4单片机利用PWM脉冲控制4个步进电机的编程方法最近购入一块IAP15W4K58S4(图1)的STC单片机的最小系统,然后用它控制步进电机,步进电机驱动器为基于TB6600的MicroStep Driver(图2)驱动器。
为了能控制该驱动器,利用现有的单片机系统控制驱动器。
连接电路原理图如图3所示,图中Vcc=5V.图1 IAP15W4K58S4单片机最小系统图2 步进电机驱动器使IAP15W4K58S4单片机能够控制步进电机,首先需要产生PWM脉冲,本例子产生频率为1KHz,占空比为50%的脉冲,P2.1、P2.2、P2.3、P3.7口输出4路PWM脉冲。
生产PWM脉冲,单片机涉及到的寄存器(不考虑PWM中断)有P_SW2(端口配置寄存器)、PWMCFG(PWM配置寄存器,初始电平高低)、PWMCKS(PWM时钟选择寄存器)、由PWMCH(高7位)和PWMCL(低8位)组成的15位PWM计数器、由PWM n T1H、PWM n T1L和PWM n T2H、PWM n T2L组成的PWM脉冲翻转计数器(其中PWM n T1H、PWM n T1L组成第一次翻转15位计数器,其中PWM n T2H、PWM n T2L组成第二次翻转15位计数器,n取值范围为2、3、4、5、6、7)、PWM n CR(PWM n的控制寄存器,设置输出管脚选择和中断使能控制,n取值范围为2、3、4、5、6、7)和PWMCR(PWM控制寄存器,用于开启各个端口和PWM模块开关,该寄存器最后设置)。
由于生成PWM,需将I/O 口配置为准双向口或强推挽模式,所以还需配置P m M0和P m M1寄存器,m取值范围为0~3。
以上寄存器各个位配置可参考该单片机的数据手册,本项目的例程参考STC官方例程基础进行修改,如后文所述。
IAP15W4K58S4单片机的特殊功能寄存器区中要使用扩展的特殊功能寄存器需要配置P_SW2的bit7位,将其(bit7)置1。
基于单片机ULN2003的步进电机控制系统(汇编及C语言程序各一个)

图8 总体电路图1.3.4软件设计通过分析可以看出,实现系统功能可以采用多种方法,由于随时有可能输入加速、加速信号和方向信号,因而采用中断方式效率最高,这样总共要完成4个部分的工作才能满足课题要求,即主程序部分、定时器中断部分、外部中断0和外部中断1部分,其中主程序的主要功能是系统初始参数的设置及启动开关的检测,若启动开关合上则系统开始工作,反之系统停止工作;定时器部分控制脉冲频率,它决定了步进电机转速的快慢;两个外部中断程序要做的工作都是为了完成改变速度这一功能。
下面分析主程序与定时器中断程序及外部中断程序。
(1)主程序设计主程序中要完成的工作主要有系统初始值的设置、系统状态的显示以及各种开关状态的检测判断等。
其中系统初始状态的设置内容较多,该系统中,需要初始化定时器、外部中断;对P1口送初值以决定脉冲分配方式,速度值存储区送初值决定步进电机的启动速度,对方向值存储区送初值决定步进电机旋转方向等内容。
若初始化P1=11H、速度和方向初始值均设为0,就意味着步进电机按四相单四拍运行,系统上电后在没有操作的情况下,步进电机不旋转,方向值显示“0”,速度值显示“0”,主程序流程图如图9所示。
(2)定时中断设计步进电机的转动主要是给电机各绕组按一定的时间间隔连续不断地按规律通入电流,步进电机才会旋转,时间间隔越短,速度就越快。
在这个系统中,这个时间间隔是用定时器重复中断一定次数产生的,即调节时间间隔就是调节定时器的中断次数,因而在定时器中断程序中,要做的工作主要是判断电机的运行方向、发下一个脉冲,以及保存当前的各种状态。
程序流程图如图10所示。
(3)外部中断设计外部中断所要完成的工作是根据按键次数,改变速度值存储区中的数据(该数据为定时器的中断次数),这样就改变了步进电机的输出脉冲频率,也就是改变了电机的转速。
速度增加按钮S2为INT0中断,其程序流程为原数据,当值等于7时,不改变原数值返回,小于7时,数据加1后返回;速度减少按钮S3,当原数据不为0,减1保存数据,原数据为0则保持不变。