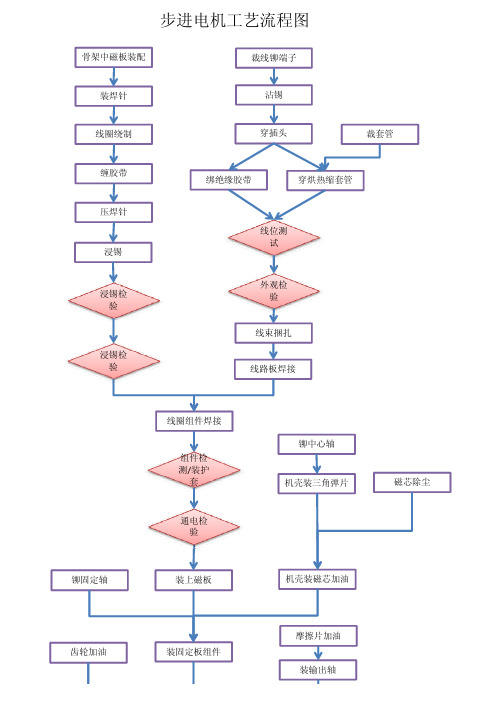
步进电机工艺流程图
plc步进电机控制方法攻略程序+图纸

PLC控制步进电机应用实例基于PLC的步进电机运动控制一、步进电机工作原理1. 步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单2. 步进电机的运转原理及结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,即A 与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A‘与齿5相对齐,(A‘就是A,齿5就是齿1)3. 旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力,以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
步进电机的静态指标术语拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
步进电机工艺流程图.
测摩 擦力 矩
装齿轮Ⅱ/Ⅲ
装齿轮Ⅰ/输出 轴
装盖板
封前检 验
铆封
齿轮吻 合检查
测牵 入力
矩
耐压 测试
线束捆扎 贴铭牌
成品 检验 包装 入库
铆输出轴 摇轴 拉轴检 验
装轴套
噪声 检测
步进电机工艺流程图
骨架中磁板装配
裁线铆端子
装焊针
沾锡
线圈绕制
穿插头
裁套管
缠胶带
压焊针
浸锡
浸锡检 验
浸锡检 验
绑绝缘胶带
穿烘热缩套管
线位测 试
外观检 验
线束捆扎
线路板焊接
铆固定轴
线圈组件焊接
组件检 测/装护
套
通电检 验
装上磁板
铆中心轴 机壳装三角弹片
磁芯除尘
机壳装磁芯加油
齿轮加油
装固定ห้องสมุดไป่ตู้组件
摩擦片加油 装输出轴
(整理)四相步进电机原理图

四相步进电机原理图本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c 所示:a. 单四拍b. 双四 c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
步进电机的工作原理图解

1。
步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿.依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式.单四拍与双四拍的步距角相等,但单四拍的转动力矩小.八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度.单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c 所示:a。
单四拍 b. 双四拍c八拍51单片机驱动步进电机的方法.驱动电压12V,步进角为7.5度. 一圈360 度, 需要48 个脉冲完成!!!该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色. 采用51驱动ULN2003的方法进行驱动.ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
1.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角.这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点.使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
电机基本生产工艺流程图-推荐优秀PPT
好的工艺能够充分的保证产品的质量,提供工作的效率。
❖ 工序的定义:
工序是指一个或一组工人,在一个工作地对一个或同时 对几个工件所连续完成的那一部分工艺过程。
划分工序的依据是工作地是否变化和工作是否连续。 直白的说要完成某个工艺过程要分成几步做,每个步骤 就是一道工序。
电机的基本生产流程(拉伸电机)
好的工艺能够充分的保证产品的质量,提供工作的效率。
直白的说要完成某个工异艺步过程电要机分成几步做,每个步骤空调器
定子厚度
工艺与工序定义
❖ 工艺的定义:
一般说,工艺要求采用合理的手段、较低的成本完成产品制作,同时必须
达到设计规定的性能和质量,其中成本包括施工时间、施工人员数量、工装设备
投入、质量损失等多个方面。
C:\Documents
and Settings\1000070a7n8d\桌Se面t\t1i1n压gs装\1风00叶00.7d0ao7nc8d\桌Se面tt\i副ng本s\S10P0精00益70总78装\桌生面产\能关力于排带拉支
一个好的产品它的生产过程绝不能随心所欲,必须要按照一定的规范标准来
实施。
通常工艺定义如下:劳动者利用生产工具对各种原材料、半成品进行加工和
处理,改变它们的几何形状、外形尺寸、表面状态、内部组织、物理和化学性能
以及相互关系,最后使之成为预期产品的方法及过程。
狭义上讲:工艺就是规范或标准(如本司的工艺流程、作业指导书、排拉图、
工艺通知等)。
C:\Documents
C:\Documents
❖ 转子的基本生产工艺流程
划分工序的依据是工作地是否变化和工作是否连续。
好的工艺能够充分的保证产品的质量,提供工作的效率。
plc步进电机控制方法攻略程序图纸

PLC控制步进电机应用实例基于PLC的步进电机运动控制一、步进电机工作原理1. 步进电机简介步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单2. 步进电机的运转原理及结构电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,即A 与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A‘与齿5相对齐,(A‘就是A,齿5就是齿1)3. 旋转如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力,以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
步进电机的静态指标术语拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
步进电机内部结构、驱动原理图和汇编程序
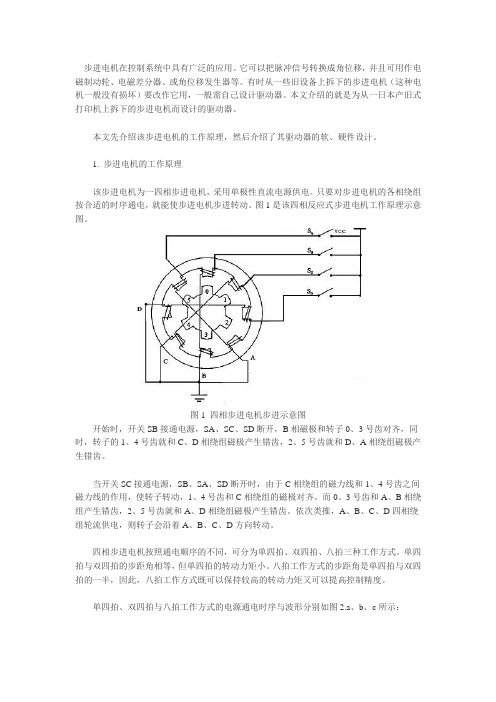
步进电机在控制系统中具有广泛的应用。
它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。
有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。
本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。
本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
电机生产流程图
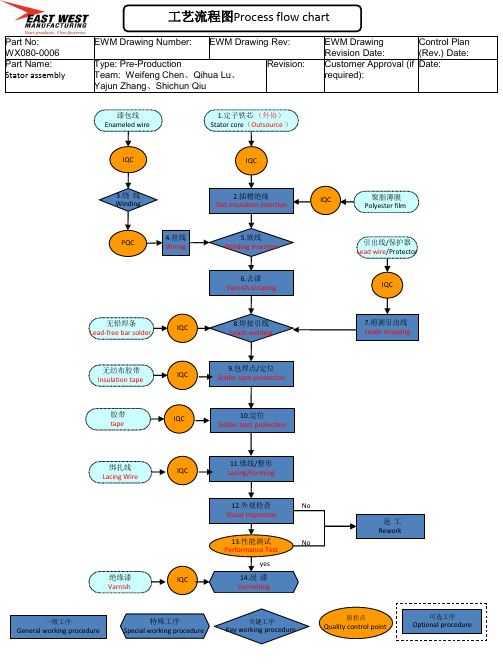
Type: Pre-Production Team: Weifeng Chen、Qihua Lu、 Yajun Zhang、Shichun Qiu
漆包线 Enameled wire
1.定子铁芯 (外协) Stator core(Outsource )
IQC
IQC
3.绕 线 Winding
2.插槽绝缘 Slot insulation insertion
IQC
聚脂薄膜 Polyester film
PQC
4.挂线 Wiring
5.嵌线 Winding insertion
引出线/保护器 Lead wire/Protector
6.去漆 Varnish scraping
IQC
无铅焊条 Lead-free bar solder
IQC
8.焊接引线 Leads welding
工艺流程图Process flow chart
Part No: WX080-0006 Part Name: Stator assembly EWM Drawing Number: EWM Drawing Rev: Revision: EWM Drawing Control Plan Revision Date: (Rev.) Date: Customer Approval (if Date: required):
12.外观检查 Visual Inspection 13.性能测试 Performance Test yes 绝缘漆 Varnish IQC 14.浸 漆 Varnishing
No 返 工 Rework No
一般工序
General working procedure
特殊工序 Special working procedure
步进电机驱动电路

步进电机驱动电路[单机片]1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:图2.步进电机工作时序波形图图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。
D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
步进电机的工作原理ppt课件
360 ZrN
如:Zr=40 ,
N:一个周期的运行拍数,即通电
状态循环一周需要改变的次数
Zr:转子齿数
N=3 时
S
360 3 403
1 单拍制
拍数:N=km
m:相数
k= 2 双拍制
转速
每输入一个脉冲,电机转过
S
360 ZrN
即转过整个圆周的1/(ZrN), 也就是1/(ZrN)转
因此每分钟转过的圆周数,即转速为
步进电动机结构
步进电机主要由两部分构成:定子
和转子。它们均由磁性材料构成
。定、转子铁心由软磁材料或硅
钢片叠成凸极结构,定、转子磁
极上均有小齿,定、转子的齿数
相等。其中定子有六个磁极,定子
定子磁极上套有星形连接的三相
控制绕组,每两个相对的磁极为
一相,组成一相控制绕组,转子上
没有绕组。转子上相邻两齿间的
A
B'
C'
C
B
A'
A
B'
C'
C
B
A'
AB通电
BC通电
A
B'
C'
C
B
A'
CA通电
工作方式为三相双三 拍时,每通入一个电 脉冲,转子也是转
30,即 S = 30。
以上三种工作方式,三相双三拍和三相单双六 拍较三相单三拍稳定,因此较常采用。
步距角 步进电机通过一个电脉冲转子转过的角度,称为步距 角。
S
步进电机的种类:
通常按励磁方式分为三大类: 1)反应式:转子无绕组,定转子开小齿、步距小。应 用最广。 2)永磁式:转子的极数=每相定子极数,不开小齿, 步距角较大,力矩较大。 3)感应子式(混合式): 开小齿,混合反应式与永磁 式优点:转矩大、动态性能好、步距角小。
四相步进电机原理图

四相步进电机原理图及其驱动器的软、硬件设计1. 步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c 所示:a. 单四拍b. 双四拍 c八拍图2.步进电机工作时序波形图2.基于AT89C2051的步进电机驱动器系统电路原理步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
【VIP专享】四相步进电机原理图及程序

四相步进电机原理图本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。
1. 步进电机的工作原理 该步进电机为一四相步进电机,采用单极性直流电源供电。
只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。
图1是该四相反应式步进电机工作原理示意图。
图1 四相步进电机步进示意图 开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。
而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。
依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。
单四拍与双四拍的步距角相等,但单四拍的转动力矩小。
八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:a. 单四拍b. 双四拍 c八拍图2.步进电机工作时序波形图 2.基于AT89C2051的步进电机驱动器系统电路原理 步进电机驱动器系统电路原理如图3:图3 步进电机驱动器系统电路原理图 AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。
使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。
图中L1为步进电机的一相绕组。
AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
步进电机工艺流程图

骨架中磁板装配
裁线铆端子
装焊针
沾锡
线圈绕制
穿插头
裁套管
缠胶带
压焊针
浸锡
浸锡检 验
浸锡检 验
绑绝缘胶带
穿烘热缩套管
线位测 试
外观检 验
线束捆扎
线路板焊接
铆固定轴
线圈组件焊接
组件检 测/装护
套
通电检 验
装上磁板
铆中心轴 机壳装三角弹片
磁芯除尘
机壳装磁芯加油
齿轮
测摩 擦力 矩
装齿轮Ⅱ/Ⅲ
装齿轮Ⅰ/输出 轴
装盖板
封前检 验
铆封
齿轮吻 合检查
测牵 入力
矩
耐压 测试
线束捆扎 贴铭牌
成品 检验 包装 入库
铆输出轴 摇轴 拉轴检 验
装轴套
噪声 检测
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
骨架中磁板装配
裁线铆端子
装焊针
沾锡
线圈绕制
穿插头
裁套管
缠胶带
压焊针
浸锡
浸锡检 验
浸锡检 验
绑绝缘胶带
穿烘热缩套管
线位测 试
外观检 验
线束捆扎
线路板焊接
铆固定轴
线圈组件焊接
组件检 测/装护
套
通电检 验
装上磁板
装固定板组件
摩擦片加油 装输出轴
测摩 擦力 矩
装齿轮Ⅱ/Ⅲ
装齿轮Ⅰ/输出 轴
装盖板
封前检 验
铆封
齿轮吻 合检查
测牵 入力
矩
耐压 测试
线束捆扎 贴铭牌
成品 检验 包装 入库
铆输出轴 摇轴 拉轴检 验
装轴套
噪声 检测