第二章 曲柄连杆机构动力学分析
第二章曲柄连杆机构动力学分析

1 sin 1 2 2 L cos 1 sin 2 (近似式)
2 2
L
cos
(精确式)
在α =0º 或180º 时达到极值: Le 连杆摆动角加速度ε L: sin 2 2 L 1 3/ 2 2 2 1 sin
(此值约为1.6)
3、活塞加速度
cos cos a R 3 cos cos
2 2
2 2 2
(精确式)
a R (cos cos 2 ) R cos R cos 2 a I a II
(近似式)
(精确式)
1 2 L sin 1 1 3 cos2 (近似式) 2
2
在α =90º 或270º 时达到极值:
Le
2 (1 2 )1 / 2
(精确式)
1 (近似式) 2 摆动角速度和角加速度精确式中分母均近似等于 1 ,因此两者均 随α 近似按简谐规律变化。
用近似式计算加速度在α =0º 、180º 时没有误差,在α =90º 、270º 时误差最大。以λ =0.32时为例,相对误差约为 5.3%
由近似式可得出活塞加速度的最大值和最小值: ① 当λ <1/4时,α =0º 时活塞正向最大加速度 2 (极大值) a R (1 )
max
α =180º 时活塞负向最大加速度
4
1 cos 2 x I x II
(近似式)
无量纲速度(活塞速度系数):
v sin v R cos
02第二章 曲柄连杆机构
2-2. 机体组
水平对置式机体(富士重工 SCX)
2-2. 机体组
(7)按曲轴箱结构形式分类
①平底式(一般式)机体 其特点是 油底壳安装平面和曲轴旋转中心在同 一高度。这种机体的优点是机体高度 小,重量轻,结构紧凑,便于加工, 曲轴拆装方便;但其缺点是刚度和强 度较差。
②龙门式机体 特点是油底壳安装平 面低于曲轴的旋转中心。它的优点是 强度和刚度都好,能承受较大的机械 负荷;但其缺点是工艺性较差,结构 笨重,加工较困难。
③半球形燃烧室 其结构紧凑,散热面积小,气门直径大,气道比较平直火焰传播距离短,有 利于促进燃料的完全燃烧。
④多球形燃烧室 结构紧凑,散热面积小,火焰传播距离短,气门直径大,气道比较平直,产 生挤气涡流。
⑤蓬形燃烧室 性能与半球形相似,且易组织挤气运动。
柴油机分割式燃烧室形状:
①涡流室燃烧室 主、副燃烧室之间的连接通道与副燃烧室切向连接, 副室形成压缩涡流, 燃料顺气流方向喷射。 ② 预燃室燃烧室主、副燃烧室之间的连接通道不与副燃烧室切向连接,副室形成强紊流, 燃料迎风喷射。
好。 气环:多采用合金铸铁 油环:钢片
2-3. 曲柄连杆机构--活塞组
4)气环的密封机理: 活塞环在自由状态下,由于开口的张开,环的外 径略大于气缸直径;而装入气缸后,由于径向弹 力的作用使环的外圆面与气缸壁贴紧形成所谓的 “第一密封面”,气缸内的高压气体不可能通过 第一密封面泄漏。而在工作条件下,一旦燃气压 力产生,则气环就在燃气压力作用下压紧在环槽 的下端面上,形成所谓的“第二密封面”。高压 气体也不可能通过第二密封面泄漏。进入径向间 隙中的高压气体只能使环的外圆面与气缸壁更加 贴紧。这时漏气的唯一通道就是活塞环的开口端 隙。如果几道活塞环的开口相互错开,那么就形 成了“迷宫式”漏气通道。
曲柄连杆机构受力分析
五、曲轴轴颈和轴承的负荷 1,曲柄销负荷矢量固
.
.
2.连杆轴承负荷矢量固
.
.Leabharlann ....
第二节 曲柄连杆机构上的作用力 一、气体压力
.
二、惯性力
.
1.往复惯性力 2.旋转惯性力
.
.
.
三、作用在曲柄连杆机构上的力
.
.
.
四、发动机的扭矩 1.单缸扭矩
发动机的翻倒力矩M’
.
2.多缸机扭矩、各主轴颈和曲柄销扭矩 知道了单缸扭短在一个循环的变化规律,考虑
各缸的着火间隔角将各缸扭矩作移相叠加就得多缸 扭矩。
.
影响扭矩不均匀度的因素: 1、对于同一台发动机,μ值随工况而变化,标定工况 下的μ值最小,往复惯性力仅影响上式分子,而平均 扭矩与示功图有关。 2、对于不同的发动机,μ值的大小取决于发动机的行 程数,气缸数,转速,气体压力,往复运动质量,曲 柄排列载型式,气缸夹角和发火顺序。 一般转速,功率相同时,二行程发动机较四行程发动 机μ值为小,相同类型的发动机气缸数越多μ值越小。
多缸发动机曲轴的输出扭矩最大值mmax一般发生在位于曲轴中间的各个主轴颈而不是靠近功率输出端的主轴颈上26扭矩不均匀度扭矩不均匀度用来评价发动机曲轴输出扭矩变化的均匀程度
第二章 曲柄连杆机构受力分析
.
第二章 曲柄连杆机构受力分析
本章分析曲柄连杆机构的运动规律和作用在主要 零件上的力,作为分析计算强度、刚度、振动和磨损 问题的依据。
.
多缸发动机曲轴的输出扭矩。
多缸发动机各个缸的工作情况稍有不同,但可
近似地用其中一个气缸的扭矩曲线来求多发动机的 合成扭矩曲线。
先在一个循环周期内绘制第一缸的扭矩曲线, 再按发火相位差绘制第2、3、......缸的扭 矩曲线,并放在第一缸的扭矩曲线与之相应的曲轴 转角的位置,然后求出同一曲轴转角的各个气缸的 扭矩曲线纵坐标的代数和,即得到多缸发动机的合 成扭矩。
第二章 曲柄连杆机构

6)桶间梯形环:现代高速柴油机广泛使用。 7)开槽环:开槽内储存对润滑油有较强吸附能力 的多孔性氧化铁。有利于润滑、磨合和密封。 8)顶岸环:有利于密封,有利于降低HC排放。
(二)油环 1、作用 1)刮掉缸壁上多余的机油,并且均匀分布缸壁 上的机油。 2)辅助密封。 2、分类(图2-33) 1)普通油环(整体式油环) 2)组合式钢片油环
一、机体
1、工作条件和材料 1)气缸工作条件: 气缸受到高温、高压的冲击;受到腐蚀; 活塞在气缸里作高速运动而受到磨损等。 2)要求:足够的强度、刚度,耐磨损、腐蚀, 结构紧凑,质量轻。 3)材料:高强度灰铸铁 或铝合金。 但是为了降低成本,通常是机体用灰铸铁, 气缸孔用优质合金铸铁,而采用气缸套。
( 3 )活塞销座 A、作用:支承活塞销,将活塞顶部气体作用 力经过活塞销传给连杆。 B、活塞销偏移布置(图2-25) 目的:为了减少活塞在上下往复运动时敲击 气缸的噪音与磨损。 (4)裙部的表面处理 汽油机:常用镀锡方法 柴油机:一般是磷化,还有的用涂石墨。
6、活塞在气缸内的安装注意事项 1)按照活塞顶部的指定标记安装(注意喷 油方向、气门方向) 2)同台发动机的活塞质量差不能超过10g, 并与相同尺寸公差的缸盖配合。 3)开纵向槽的活塞面尽量安装在不受侧压 力(主、次推力面)的一面,以免活塞 在运动时划伤气缸壁。
三、活塞销 (一)作用 1、连接活塞与连杆小头。 2、将活塞承受的气体力传给连杆。 (二)材料 多用低碳钢和低碳合金钢。 同时要求其芯部具有一定的韧性。为了减轻质量, 常将其做成空心圆柱形。 (三)内孔形状 1)圆柱形(加工容易,但质量较大) 2)组合形(介于前后两者之间) 3)两段截锥形(质量较小,但加工较难)
第二章 曲柄连杆机构
作用:将燃料燃烧的热能转换为机械能,将活塞 的往复运动转变为曲轴的旋转运动,并将能量 传输出去。 本章主要内容: 1、 曲柄连杆机构的受力及运动分析 2、 机体组 3、 活塞连杆组 4、 曲轴飞轮组
第二章_曲柄连杆机构受力分析(冲突_WIN20160317ZJK_20130513224638)

11
曲柄连杆机构受力分析
2019/1/9
内燃机设计
12
曲柄连杆机构受力分析
2019/1/9
内燃机设计
13
一、气体作用力
• 作用在活塞顶上的气体力就是内燃机的示功 图,示功图可通过工作过程模拟计算(对新 设计内燃机)或试验方法(对现有内燃机) 确定。
Fg D ( pg p' ) / 4
* /(r ) sin ( / 2) sin 2 (1 2 sin 2 ) 1/ 2
a* a /(r 2 ) cos [cos2 (1 2 sin 2 ) (2 / 4) sin 2 2 ](1 2 sin 2 ) 3/ 2
sin sin
2019/1/9
内燃机设计
7
活塞运动规律
• 整理以上两式后得 x r[(1 1 / ) cos (1 2 sin 2 )1/ 2 / ]
r[sin ( / 2) sin 2 (1 2 sin 2 ) 1/ 2 ]
2019/1/9
内燃机设计
10
第二节 曲柄连杆机构受力分析
• 作用在内燃机曲柄连杆机构中的力有缸内气
体作用力、运动质量惯性力、摩擦力、支承
反力和有效负荷等。一般受力分析时忽略摩
擦力使受力分析偏于安全。所以,在内燃机
曲柄连杆机构中,气体作用力、惯性力与支
承反力、有效负荷相平衡。
2019/1/9
内燃机设计
2019/1/9
内燃机设计
8
2、活塞运动规律简化表达式
• 对于一般内燃机 1 / 3 ,可把上列各式简化 成
x* 1 cos ( / 4)(1 cos2 )
汽车技术文档——第2章 曲柄连杆机构课件
气环(压缩环):防止气缸内的混合气及爆发气体、废气泄漏(密 封和导热作用)。
油环:将残留在气缸壁面上的润滑油刮掉,并在气缸壁上铺涂一层 均匀的机油膜(刮油,布油、辅助封油)。
❖ 工作条件
高温、高压、高速及润滑困难。
❖ 材料:要求耐热、耐磨及高的强度和冲击韧性
活塞环材料是合金铸铁。第一道气环的工作表面一般都镀上多孔性 铬。其硬度高,并能储存少量机油,以改善润滑,其余气环一般镀 锡或者磷化(改善磨合性能)。还可用喷钼来提高活塞环的耐磨性。
作用下不烧损、不变质。 具有一定弹性,能补偿结合面的不平度,以保证密封。 拆装方便,能重复使用,寿命长。
❖ 结构
金属-石棉衬垫—石棉中间夹有金属丝或金属屑,外覆铜皮或钢皮 金属-复合材料衬垫 全金属衬垫
❖ 安装方向:
把气缸垫光滑的一面朝气缸体,否则容易被气体冲坏
汽缸垫
活 塞 连 杆 组 的 组 成 :
连接活塞和连杆小头,将活塞承受的气体作用力传给连杆。
❖ 工作条件及结构:
活塞销在高温下承受很大的周期性冲击载荷,润滑条件较差(一般 靠飞溅润滑),因而要求有足够的刚度和强度,表面耐磨,质量尽 可能小。为此,活塞销通常做成空心圆柱体。内孔形状有:两段截 锥形、圆柱形、两段截锥和一段圆柱的组合形。
❖ 材料:
6000rpm,活塞的平均速度可达10~14m/s。
❖ 要求
要求活塞质量小,热膨胀系数小,导热性好和耐磨。
❖ 材料
汽车发动机目前广泛采用的活塞材料是铝合金。在个别的汽油机上 采用高级铸铁或耐热钢制造活塞。
活塞的顶部
活塞头部
❖ 活塞环槽以上的部分。 ❖ 主要作用:
承受气体压力,并传给 连杆;
第2章曲柄连杆机构

2.3机体组
2.3.1汽缸体
1.汽缸体的结构形式 水冷发动机的汽缸体和曲轴箱通常铸成一体,可称为汽缸体
一曲轴箱,也可简称为汽缸体。汽缸体上半部有一个或若十个为 活塞在其中运动导向的圆柱形空腔,称为汽缸;下半部为支承曲轴 的曲轴箱,其内腔为曲轴运动的空间。作为发动机各个机构和系 统的装配基体,汽缸体本身应具有足够的刚度和强度。其具体结 构形式分为三种,如图2-4所示。
汽缸套有干式和湿式两种,如图2-10所示。
上一页 下一页 返回
2.3机体组
2.3.2汽缸盖与汽缸衬垫
1.汽缸盖 汽缸盖的主要功用是密封汽缸上部,并与活塞顶部和汽缸一
起形成燃烧室。同时,汽缸盖也为其他零部件提供安装位置。汽 缸盖的燃烧室一侧直接受到高温、高压燃气的作用。在承受热负 荷时,由于形状复杂,冷却不均匀,各部分温差大,特别是在进、 排气门口之间以及进、排气门口与汽油机的火花塞之间(或进、排 气门)与柴油机的喷油器之间的所谓“鼻梁区”,热应力很高,是 容易出现裂纹损坏的部位;而汽缸盖在机械负荷和热负荷作用下产 生的变形会导致进、排气门密封被破坏和汽缸盖密封(气封、水封、 油封)被破坏,影响发动机的动力性、经济性和工作可靠性。因此, 要求汽缸盖应具有足够的强度和刚度。
下一页 返回
2.5曲轴飞轮组
按照曲轴的主轴颈数,可以把曲轴分为全支承曲轴和非全支 承曲轴两种。在相邻的两个曲拐之间,都设置一个主轴颈的曲轴, 称为全支承曲轴;否则称为非全支承曲轴。
因此,直列发动机的全支承曲轴,其主轴颈的总数(包括曲轴 前端和后端的主轴颈)比汽缸数多一个;V形发动机的全支承曲轴, 其主轴颈的总数比汽缸数的一半多一个。全支承曲轴的优点是可 以提高曲轴的刚度和恋曲强度,并目可减轻主轴承的载荷。其缺 点是曲轴的加工表面增多,主轴承增多,使机体加长。这两种形 式的曲轴均可用于汽油机,但柴油机多采用全支承曲轴,这是因 为其载荷较大的缘故。
02曲柄连杆机构的运动和受力分析(2)

Fr
Fc'*
与单曲拐转矩 M大t小相等,方向相反
F g
+
Fj
Fl*
曲柄连杆机构中的力和力矩
—单元曲柄连杆机构对机体的作用力(4)
单缸机机体,受
曲柄连杆机构作用力 缸内气体作用力 发动机支撑反力
多缸机
每缸曲柄连杆机构作用 力、缸内气体作用力, 发动机支撑力
Fg Fc
Fr
ω Fc'*
设无平衡重时主轴颈载荷加平衡重后载荷平衡重引起的对主轴颈作用力则四冲程六缸机第二主轴颈zp2121z122zfff??121z?f122z?fzp2f曲柄连杆机构中的力和力矩轴颈和轴承载荷的极坐标图4四冲程六缸机第二主轴颈
汽车发动机设计
(2)
赵雨东
清华大学汽车工程系
Mercedes-Benz SLR Mclaren
,加平衡重后
载荷 F (1,2) Z(ϕ )(2)
,平衡重
引起的对主轴颈作用
力FZp(2) ,则
F = F + F (1,2) Z(ϕ )(2)
(1,2) Z(ϕ )(1)
Zp(2)
四冲程六缸机第二主轴颈
四冲程六缸机第二主轴颈
曲柄连杆机构中的力和力矩
—轴颈和轴承载荷的极坐标图(5)
主轴承载荷
F (i) Qy
cosψ i ]lb(i)
/ lc(i)
F (i+1) Zbx
=
−[(
F (i+1) Qx
+
F (i+1) rq
)
cosψ
i +1
−
F (i+1) Qy
sinψ
]l (i+1)
曲柄连杆机构动力学分析与计算

第一章绪论1.1内燃机概述汽车自19世纪诞生至今,已经有100多年的历史了。
汽车工业从无到有,以惊人的速度在发展着,汽车工业给人类的近代文明带来翻天覆地的变化,在人类的文明进程中写下了宏伟的篇章。
汽车工业是衡量一个国家是否强大的重要标准之一,而内燃机在汽车工业中始终占据核心的地位。
内燃机是将燃料中的化学能转变为机械能的一种机器。
由于内燃机的热效率高(是当今热效率最高的热力发动机)、功率范围广、适应性好、结构简单、移动方便、比质量(单位输出功率质量)轻、可以满足不同要求等特点,已经广泛的应用于工程机械、农业机械、交通运输(陆地、内河、海上和航空)和国防建设事业当中。
因此,内燃机工业的发展对整个国民经济和国防建设都有着十分重要的作用。
1.1.1世界内燃机简史内燃机的出现和发明可以追溯到1860年,来诺伊尔(J.J.E.Lenoir1822~1900年)首先发明了一种叫做大气压力式的内燃机,这种内燃机的大致工作过程是:空气和煤气在活塞的上半个行程被吸入气缸内,然后混合气体被火花点燃;后半个行程是膨胀行程,燃烧的煤气推动着活塞下行,然后膨胀做功;活塞上行时开始排气。
这种内燃机和现代主流的四冲程内燃机相比,在燃烧前没有压缩行程,但基本思想已经有了雏形。
这种内燃机的热效率低于5%,最大功率只有4.5KW,1860~1865年间,共生产了约5000台。
1867年奥拓(Nicolaus A.Otto,1832~1891年)和浪琴(Eugen Langen,1833~1895年)发明了一种更为成功的大气压力式内燃机。
这种内燃机是利用燃烧所产生的缸内压力,随着缸内压力的升高,在膨胀行程时加速一个自由活塞和齿条机构,他们的动量将使得缸内产生真空,然后大气压力推动活塞内行。
齿条则通过滚轮离合器和输出轴相啮合,然后输出功率。
这种发动机的热效率可以达到11%,共生产了近5000台。
由于煤气机必须使用气体燃料,而当时的气体燃料的来源非常困难,这从某种意义上讲就阻碍了煤气机的进一步发展。
曲柄连杆机构受力分析

(1)沿气缸轴线作直线往复运动
(2)均匀转动的曲拐 (3)平面运动的连杆组
5
2. 连杆的质量换算
二质量系统
三质量系统
6
二质量系统
m1 ml (l l ) / l
m2 ml l / l
等效原则:
•质量相等 •质心重合 •转动惯量相等
7
3.往复质量和往复惯性力
(1)往复运动质量
mj mp m1
第二节 曲柄连杆机构受力分析
一、气体作用力
二、惯性力
三、零件的受力分析
1一、气体作Βιβλιοθήκη 力1、气体作用力pg
Fg
D
4
2
( pg p )
'
p′
2
一、气体作用力
2、缸内压力
3
二、惯性力
曲柄连杆机构的运动及质量换算 往复惯性力 旋转惯性力
4
1.曲柄连杆机构的运动
曲柄连杆机构的所有运动零件可分为三组:
10
2、连杆小头受力分析
FC Ftg
F F1 cos
侧推力:
F1
F cos
连杆力:
11
3、曲柄销受力分析
切向力 :
F F1' sin( ) F sin( ) cos
F1
F cos
法向力:
Fn F1' cos( ) F cos( ) cos
12
4、发动机的转矩
Fr sin( ) T F r cos
13
5、倾覆力矩
Tk Fc h T
r sin( ) sin h
第二章-曲柄连杆机构

桑塔纳轿车的曲柄连杆机构
二、工作条件与受力分析
(一)、工作条件 高温:最高可达 2500K以上 高压:最高可达 3MPa—5MPa 高速:最高可达 3000 r/min—6000 r/min 化学腐蚀:可燃混合气和燃烧废气直接
接触机件。
(二)曲柄连杆机构 所受的力
③四冲程V型八缸发动机:发火间隔角为90°; 发火次序为1-8-4-3-6-5-7-2。工作循环如表2-4。
二、曲轴扭转减振器
1、功用:消除曲轴的扭转振动。 2、类型:最常见的为摩擦式扭转减振器。 它可以分为:橡胶式扭转减振器(图2-60)和 硅油式扭转减振器。
橡胶摩Байду номын сангаас式曲轴扭转减振器
一汽奥迪1.9发动机曲轴扭转减振器
图2-3b
后半程是加速运动,惯性力向上。图2-3b
第二节 气缸体与曲轴箱组
气缸体示意图
一、气缸体
1、气缸体:发动机的气缸体和曲轴箱常铸成 一体,称为气缸体--曲轴箱,简称气缸体。
气缸:气缸体上半部有若干个为活塞在其中 运动导向的圆柱形空腔。
2、气缸的工作条件:高温、高压,并且有活 塞在其中做高速往复运动。
气缸垫的要求:①足够的强度;②耐热和耐腐 蚀;③一定的弹性;④拆装方便,寿命长。
功用:保证燃烧室的密封。
类型:①金属-石棉气缸垫;②实心金属片气缸 垫;③加强型无石棉气缸垫。
气缸盖的拧紧:拧紧螺栓时,必须按由中央对称 地向四周扩展的顺序分几次进行,最后一次要用扳 手按工厂规定的拧紧力矩值拧紧。
铝合金气缸盖:最后必须在发动机冷态下拧紧;
铸铁气缸盖:最后必须在发动机热态下拧紧。
气缸盖衬垫的结构
曲柄连杆机构动力学分析

sin 1 2 sin 2 3/ 2
(精确式)
L
2 sin 1
1 2
2
1 3cos2
(近似式)
在α=90º或270º时达到极值:
Le
2 (1 2 )1/ 2
(精确式)
Le
21
1 2
2
(近似式)
摆动角速度和角加速度精确式中分母均近似等于1,因此两者均 随α近似按简谐规律变化。
2
sin
2
vI
vII
无量纲加速度(活塞加速度系数):
(精确式) (近似式)
a
a
2R
cos( cos
)
cos2 cos3
(精确式)
a cos cos2 aI aII
(近似式)
再将不同λ值下上述无量纲量的数值列成表格,以备查用。
二、偏心曲柄连杆机构(偏置曲柄连杆机构)
1、采用偏心曲柄连杆机构的原因 凡是曲轴回转中心线或者活塞销中心线不与气缸中心线相交的曲
柄连杆机构都是偏心机构。根据偏心方向的不同,分为正偏心机构 和负偏心机构。正偏心机构(如图a、图b所示)在活塞下行时连杆 摆角较小,使得作功行程中活塞侧推力有
侧
侧
(a)曲轴正偏心 (b)活塞销正偏心 (c)活塞销负偏心
偏心曲柄连杆机构
负偏心机构广泛应用于车用汽油机中,目的是减轻活塞对气缸壁的 敲击,降低运转噪声。 正偏心机构多用于柴油机,目的是改善散热,减轻主推力边的热负 荷,使顶环隙整个圆周上不积碳。
180
arcsin 1
活塞行程:S R 1/ 12 2
1/
由近似式可得出活塞最大速度
vmax
R (sin v max
曲柄连杆机构分析

43
(3)活塞的变形及采取的相应措施 a、变形原因:热膨胀、侧压力和气体压力。
44
b、变形规律 (1)活塞的热膨胀量大于气缸的膨胀量, 使配缸间隙变小。因活塞温度高于气缸壁, 且铝合金的膨胀系数大于铸铁; (2)活塞自上而下膨胀量由大而小。因温 度上高下低,壁厚上厚下薄; (3)裙部周向近似椭圆形变化,长轴沿销 座孔轴线方向。因销座处金属量多而膨胀量 大,以及侧压力作用的结果。
33
3、气缸垫 1).作用:保证缸体与缸盖间的密封,防止漏水、漏气、窜油 。 2).材料:有弹性、耐热性、耐压性 3).安装时注意方向
4). 构造 (1) 金属—石棉垫:(见a、b) 外包铜皮和钢片,且在缸口、水 孔、油道口周围卷边加强,内填 石棉(常掺入铜屑或钢丝,以坚 强导热)。 (2) 金属骨架—石棉垫:以编 织的钢丝网(图c)或有孔钢板 (图e)为骨架,外覆石棉,只 在缸口、水孔、油道口处用金属 片包边。 (3) 纯金属垫:(见图e)由 单层或多层金属片(铜、铝或低 碳钢)制成,用于某些强化发动 机。 (4) 安装注意:金属皮的金 属—石棉垫,缸口金属卷边一面 应朝向易修整接触面或硬平面。 因卷边一面会对与其接触的平面 造成压痕变形。
34
4、油底壳 1).功用:贮存和冷却机油并封闭曲轴箱。 2).构造:(1)用薄钢板冲压而成。 (2)内部设有稳油挡板,以防止汽车振动时油底壳油面产生较 大的波动。 (3)最低处有放油塞(磁性) (4) 曲轴箱与油底壳之间有密封衬垫。
35
2.2
活塞连杆组
36
37
1 活塞
1)功用: (1)与气缸盖、气缸壁等共同组成燃烧室; (2)承力传力:承受气体压力,并将此力传给连杆,以推动曲 轴旋转。 2)工作环境: 高温、散热条件差;顶部工作温度高达600-700K,且分 布不均匀;高速,线速度达到10m/s,承受很大的惯性力。活 塞顶部承受最高可达3-5MPa(汽油机)的压力,使之变形, 破坏配合联结。 3)材料: 铝合金:质量小 (约为铸铁活塞的50%~70%); 导热性好(约为铸铁的三倍);3. 热膨胀系数大。 灰铸铁
第二章 曲柄连杆机构动力学分析
§2—2 曲柄连杆机构受力分析
气体作用力 惯性力 作用在曲柄连杆 重力 机构上的作用力 负荷的反作用扭矩及机构的支撑反力 机构相对运动的摩擦力
一、曲柄连杆机构的惯性力 惯性力:加速度 质量 (一)曲柄连杆机构的换算质量 曲柄连杆机构加速度有往复运动加速度和离心运动加速度两 种,计算两种加速度引起的惯性力需将整个曲柄连杆机构的质量分 别换算成往复运动质量和离心运动质量。
旋转运动质量
mC l B m j m P mCA m P L mC l A mr mk mCB mk L
(二)曲柄连杆机构惯性力 1、 离心惯性力
Pr mr R mk R mCB R Prk PrB
2 2 2
也可写成复数形式: Pr 2、 往复惯性力
cos vmax
L
1
L R 1 2 1 R R 1 2 cos
2 2
由近似式可得出活塞平均速度
cm
1
0
Sn R (sin sin 2 )d R 2 30
2
活塞的最大速度和平均速度之比是反映活塞运动交变程度的一个 指标:
v max R 1 2 2 1 2 cm 2 R
② λ >1/4时,α =0º 时活塞正向最大加速度 2 (极大值) a R (1 )
amin R 2 (1 ) (极小值)
1 arccos( ) 时活塞负向最大加速度 4
2
max
a min
1 R (极小值,在180º —360º 范围内还有一个) 8
2 2 R 1 cos 1 cos 2 sin 4 2 1 sin( ) 活塞速度: v R R sin sin 2 cos cos 2
发动机曲柄连杆机构动力学分析西安交大理论力学实验报告

理论力学小组作业之动力学:发动机曲柄连杆机构分析小组成员:1.背景分析具体问题:如图所示发动机曲柄连杆机构:求该机构中活塞的运动、各部分的受力以及输出的力矩。
2.建模与分析1.力学模型:2.条件限制:1.不计摩擦;2.不计AB杆重;3.下方转动部分质心在轴O上;4.活塞A受缸内恒定的气体压力F;5.活塞A质量m1,转动部分OB质量m2。
3.运动分析:对活塞A :cos cos A A x y R L αβ==⋅+⋅ 令R Lλ=,由正弦定理,sin sin R L βα=得cos β=由泰勒公式展开,得224466111cos 1sin sin sin 2816βλαλαλα=----… 而实际中,13λ<,故舍掉高次项,得()22211cos 1sin 11cos 224βλαλα=-=-- 故()01cos 1cos 24A A x y R λααλ=⎡⎤=+--⎢⎥⎣⎦则 sin sin 22A A dy v R dt λωαα⎡⎤==-+⎢⎥⎣⎦ (发动机转速为n 时,匀角速30n πω=) ()2cos cos 2A A dv a R dtωαλλ==-+2 4.受力分析由于不计AB 质量,故AB 杆为二力杆,受力沿杆方向。
活塞A 收到上方气体的压力F ,器壁的反作用力F N ,杆AB 的弹力F T ,自身重力m 1g ,在器壁内做上下往复平动,再引入惯性力F g :()211cos cos2g A F m a m R ωαλλ==-+2由平衡条件,有10= F sin 0cos x N T y T g FF m g ββ=⋅=⋅=++∑∑ ; F ; F F F解得 ()()2112cos 2cos 2111cos 24g T F m g m R F ωαλαλα+-+=--转轮上B 处受力沿AB 杆方向,将其分解为切向力和法向力:()()sin cos T T n T T F F F F ταβαβ=⋅+=⋅+其中,切向力T F τ提供转动的力矩,法向力n T F 对转轴O 施加压力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
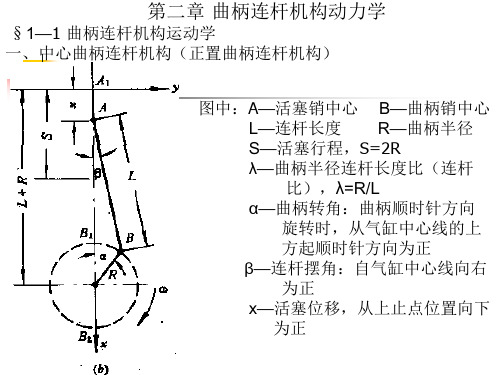
§1—1 曲柄连杆机构运动学 一、中心曲柄连杆机构(正置曲柄连杆机构)
图中:A—活塞销中心 B—曲柄销中心 L—连杆长度 R—曲柄半径 S—活塞行程,S=2R λ—曲柄半径连杆长度比(连杆 比),λ=R/L α—曲柄转角:曲柄顺时针方向 旋转时,从气缸中心线的上 方起顺时针方向为正 β—连杆摆角:自气缸中心线向右 为正 x—活塞位移,从上止点位置向下 为正
§2—2 曲柄连杆机构受力分析
气体作用力 惯性力 作用在曲柄连杆 重力 机构上的作用力 负荷的反作用扭矩及机构的支撑反力 机构相对运动的摩擦力
一、曲柄连杆机构的惯性力 惯性力:加速度 质量 (一)曲柄连杆机构的换算质量 曲柄连杆机构加速度有往复运动加速度和离心运动加速度两 种,计算两种加速度引起的惯性力需将整个曲柄连杆机构的质量分 别换算成往复运动质量和离心运动质量。
在α =90º 或270º 时达到极值: 2 Le 2 1/ 2 (1 )
Le 1
2
(精确式)
1 2
2
(近似式)
摆动角速度和角加速度精确式中分母均近似等于1,因此两者均 随α 近似按简谐规律变化。
在曲柄连杆机构运动学计算中,通常将活塞的位移、速度和加速度 分别除以R、Rω 、Rω 2,无量纲化,写成 无量纲位移(活塞位移系数):
2 2
式中a按近似式;PjI:一次往复惯性力;PjII:二次往复惯性力 令 m j R 2 ,可将一次、二次往复惯性力分别写成复数形式: C
cos
2
sin
2
2 1/ 2
连杆摆动角加速度:L 2
(1 ) sin (1 sin )
2 2 2 2
1
2
sin
2 3/2
将上述各式与中心曲柄连杆机构运动参数相比,只是多了含ξ 的项。由于汽车发动机的偏心率通常都很小,两者的差别很小。
4、连杆的运动 连杆在摆动平面内的运动是随活塞的往复运动和绕活塞销的摆动 的复合运动。往复运动规律上面已给出,这里只考虑摆动。 连杆摆角β : arcsin( sin ) (精确式)
sin 1
1 6
sin
2 2
(近似式) (精确式) (近似式)
主 推 力 侧 次 推 力 侧
(a)曲轴正偏心 (b)活塞销正偏心 (c)活塞销负偏心
偏心曲柄连杆机构
负偏心机构广泛应用于车用汽油机中,目的是减轻活塞对气缸壁的 敲击,降低运转噪声。 正偏心机构多用于柴油机,目的是改善散热,减轻主推力边的热负 荷,使顶环隙整个圆周上不积碳。
(a)进、排气上止点前后 (b)压缩上止点前后
1、 活塞组质量mp:含活塞、活塞环、活塞销质量 2、 曲柄换算质量mk:
m k m z 2m
R
式中 mz—曲柄销部分质量; mω—单个曲柄臂不平衡质量; ρ—曲柄臂不平衡质量质心到曲轴回转中 心距离
3、 连杆组换算质量 常采用的方法为二质量替代系统:用集中在小头 处 的 换 算 质 量 mCA 和集中在大头处的质量mCB 来代替连杆的实际质量。换算的原 则是: ① 换算系统两质量之和等于原连杆的质量mC,即 mCA+mCB=mC ② 换算系统的质心与原连杆质心重合,即 mCAlA=mCBlB lA:连杆质心至连杆小头中心距离 lB:连杆质心至连杆大头中心距离 由上述两个条件得
max
ห้องสมุดไป่ตู้
α =180º 时活塞负向最大加速度 2 a min R ( 1 ) (极小值) ② λ >1/4时,α =0º 时活塞正向最大加速度 2 (极大值) a R (1 )
max
arccos(
a min
2
1 4
) 时活塞负向最大加速度
(极小值,在180º —360º 范围内还有一个)
在α =0º 或180º 时达到极值: Le 连杆摆动角加速度ε L:
L 1
2 2
sin
1
2
sin
2
3/2
(精确式)
L
1 2 2 sin 1 1 3 cos 2
2
(近似式)
在α =90º 或270º 时达到极值: e arcsin
e (1
1 6
)
2
连杆摆动角速度ω L:
L
L
cos
2 2
1 sin 1 2 2 cos 1 sin 2 (近似式)
(精确式)
cos
(精确式)
sin 2 v I v II
(近似式)
2
无量纲加速度(活塞加速度系数):
a
a
R
2
cos( ) cos
cos cos
3
(精确式)
(近似式) 再将不同λ 值下上述无量纲量的数值列成表格,以备查用。
a cos cos 2 a I a II
v max cm
R 1 2
2
2
1
2
R
(此值约为1.6)
3、活塞加速度
2 cos cos 2 a R 3 cos cos
(精确式)
a R (cos cos 2 )
2
R cos R cos 2 a I a II
v max R (sin v max
2
sin 2 v max )
及最大速度时曲轴转角 1 v max arccos 4
1 8 1
2
由活塞速度精确式,近似取cosβ =1,在近似估计时,可认为最大 速度出现在α +β =90º 时,即连杆中心线与曲柄成直角位置,此时
1 R 8
α =180º 时活塞的加速度已不是最大负向加速度 2 (极大值) a min R ( 1 )
可以看出,对于中低速柴油机其连杆较长,λ 小于1/4,活塞加速 度在360º 范围内只有两个极值;对于高速内燃机,λ 一般大于1/4, 活塞加速度在360º 范围内有四个极值 实际发动机的活塞最大加速度: 汽油机amax=(500-1500)g 柴油机amax=(200-800)g
2 2
(近似式)
用近似式计算加速度在α =0º 、180º 时没有误差,在α =90º 、270º 时误差最大。以λ =0.32时为例,相对误差约为 5.3%
由近似式可得出活塞加速度的最大值和最小值: ① 当λ <1/4时,α =0º 时活塞正向最大加速度 2 (极大值) a R (1 )
m CA m CB m m C m CA l A m CB l B m l2 m l2 I CA A CB B
m CA I /( Ll A ) m CB I /( Ll B ) m m I /( l l ) C A B
通常Δ m较小。为确定mCA、mCB 需要知道连杆组的质心位置, 为此可用天平称量法、力学索多边形法确定质心,现在的三维CAD 软件也有此功能。 最后可得出整个曲柄连杆机构的换算质量: 往复运动质量 m j m P m CA m P
mC lB L mC lA
旋转运动质量
m r m k m CB m k
m CA m C
L lA L
m CB m C
L lB L
mC
lA L
对于有的高速发动机还须满足一个条件: ③ 两个换算质量对连杆质心的转动惯量之和等于原来连杆的转动惯 量,即 2 2
m CA l A m CB l B I C
式中IC为原连杆的转动惯量。但采用二质量替代系统时,在连杆 摆动角加速度下的惯性力矩要偏大 Δ MC=[(mCAlA2+mCBlB2)-IC]ε 为此,可用三质量替代系统:
活塞加速度:
2 cos cos 2 a R 3 cos cos
R
2
cos
cos 2 sin
连杆摆角: arcsin sin
连杆摆动角速度: L
1
活塞销负偏置的作用
2、偏心机构运动学参数 活塞销或曲轴对气缸中心线的偏心距e与曲柄半径R的比值称为偏 心率ξ:ξ=e/R。规定正偏心机构的e和ξ为正,负偏心机构的为负。 各运动学参数如下 活塞上止点时的曲柄转角: 1 arcsin 活塞下止点时的曲柄转角: 2 180 arcsin
二、偏心曲柄连杆机构(偏置曲柄连杆机构) 1、采用偏心曲柄连杆机构的原因 凡是曲轴回转中心线或者活塞销中心线不与气缸中心线相交的曲 柄连杆机构都是偏心机构。根据偏心方向的不同,分为正偏心机构 和负偏心机构。正偏心机构(如图a、图b所示)在活塞下行时连杆 摆角较小,使得作功行程中活塞侧推力有所减小。
S 活塞行程: R
1
1 /
1
2
2
1 /
1
2
活塞位移: R 1 / 1 2 2 cos 1 cos x
1 2 2 2 2 R 1 2 2 1
x
x