stm32,tcp协议实现
基于STM32处理器的ModbusTCP/RTU网关设计

2系统硬件设计
本设 计 的处 理 器采 用S T M3 2 F1 0 3 V E, 它是 意 法 半 导 体 推 出 的 基 F A R M C o r t e x— M 3 内 核 的高性 能 微 处理 器 。 C o r t e x - M3 处理 器 是 行业 领 先 的3 2 位 处 理 器 ,适 用于具 有高 确定性 的 实时应 用 ,已专 门开 发 为 允 许 合 作 伙伴 为范 围广 泛 的 设 备 ( 包括微 控制 器 ,汽车车 体 系统 ,工 业控 制 系统 以及无 线网络 和传 感器 )开发 高性 能低 成 本的平 台 。整体 的硬件 结构 如 图2 所示 。 如 图3 所 示 , 网 关 和 客 户 机 之 间 采 用 Mo d b u s TCP 协 议 通讯 ,相 对 于 客 户 机 言 , 网关 工 作 在 服 务 器 模式 , 它通 过 以 太 网接 收 来 自客 户 机 的数 据 包 ,并 解 析 该 数 据 包 ,从 而 根 据 不 同 的 数据 指 令 执 行 相 应 的处 理 。 网关f l J Mo d b u s 串 口设备 之 间 采用 Mo d b u s RT U协议 通讯 ,相 对 于 从 设 备 而 言它 又具 有Mo d b u s 主 站功 能 。 网关 将接 收 到的 Mo d b u s TC P 协议 包 进 行协 议转 换 之后 将Mo d b u s R TU协议 帧通过 串 口发 送到 从设 备 ,并 接受 来 自从 设备 的响 应。
关键 词
S T M 3 2 F 1 0 3:M o d b u s T C P;M o d b u s E T U ; 协 议 转
换 ;u 『 P
中 图分类 号 :T P 2 4 文献标 识 码 :B
基于STM32的无线图像实时采集传输系统

• 116•利用STM32单片机为控制芯片驱动OV2640模块,实现图像采集,通过wifi 模块把采集的图像通过TCP 协议传输给移动端手持Android 设备。
Qt 开发软件通过socket 接口编程设计出了app 用于图像实时显示OV2640模块采集的图像。
实验结果表明图像传输稳定,可以实现实时的无线图像传输。
OV2640模块可以和其它设备组合,对未来图像类设备有很好的应用潜力。
图像传输应用广泛,在安防设备上可以通过摄像头监控家门、小区等,对犯罪侦查、丢失物品寻找等起到很大作用。
在人工智能领域,需要识别特定事物,比如人脸识别、物体识别等,需要采集很多的图像样本,离不开图像采集技术。
在没有线的束缚下,摄像头和显示终端分离,无线图像传输在日常生活中也有很大的实用性,例如可以在忙着洗衣做饭的时候监控小孩的实时举动,可以查看特定角落的实时画面。
本文探索了图像监控的关键技术图像采集和传输,并通过wifi 模块由TCP 协议实现无线图像传输。
在没有线的束缚下,摄像头和显示终端分离。
在wifi 信号覆盖范围内可以实时探索看不到的或者人类不方便探索的角落。
1 无线图像传输系统无线图像传输系统分为图像采集部分、数据传输部分和终端显示部分。
三者关系如图1所示。
的滤波器,逐行排列,形成方形采集阵列,BG/GR 形式构成的像素大约可以达到200w 个。
在采集光的时候也是逐行扫描采集,直到扫描完成。
其中内部集成了数字图像处理模块,可以直接输出JPEG, GRB422和YCbCr 等数据格式。
Ov2640模块使用的是正点原子的A TK-OV2640摄像头模块。
它共有18个引脚。
其中最重要的是SCCB 总线和HREF 行同步线,VSYNC 场同步线和8位并行数据线。
SCCB 总线和I2C 总线类似用于单片机向Ov2640模块发送控制命令。
在图像采集开始之后,模块会产生采集输出时序。
HREF 输出高电平时,根据时钟进行像素数据的读取,HREF 线变为低电平时读取的数据无效,循环采集直到采完一帧为止。
基于STM32单片机的智能停车场车位管理系统的设计与实现
基于STM32单片机的智能停车场车位管理系统的设计与实现一、本文概述随着城市化进程的加快,停车难问题日益凸显,对车位管理系统的智能化、高效化需求愈发迫切。
在此背景下,本文提出了一种基于STM32单片机的智能停车场车位管理系统设计方案,旨在通过技术创新,实现对停车场车位的智能监控、预约、查询和计费等功能,提高停车场的使用效率,降低管理成本,提升用户体验。
本文首先介绍了智能停车场车位管理系统的研究背景和意义,阐述了现有车位管理系统的不足和STM32单片机在智能车位管理系统中的优势。
接着,详细介绍了基于STM32单片机的智能停车场车位管理系统的总体设计方案,包括系统架构、硬件设计、软件编程等方面。
在系统架构方面,本文采用了模块化设计思想,将系统划分为多个功能模块,便于后期维护和升级。
在硬件设计方面,本文选用了STM32F103C8T6单片机作为核心控制器,搭配超声波传感器、LCD显示屏、网络接口等外设,实现了车位检测、信息显示、网络通信等功能。
在软件编程方面,本文采用了C语言进行编程,实现了对各个功能模块的控制和管理。
本文通过实验验证了基于STM32单片机的智能停车场车位管理系统的可行性和有效性。
实验结果表明,该系统能够准确检测车位状态,实现车位预约、查询和计费等功能,提高了停车场的使用效率和管理水平。
该系统还具有操作简便、稳定可靠、成本低廉等优点,具有较高的实际应用价值。
本文的研究成果对于推动智能停车场车位管理系统的发展和应用具有一定的参考意义,也为后续研究提供了有益的借鉴和启示。
二、系统总体设计在智能停车场车位管理系统的设计中,我们采用了基于STM32单片机的硬件架构,结合先进的软件编程技术,以实现高效、准确、实时的车位管理。
系统总体设计主要包括硬件设计、软件设计以及系统架构设计三个部分。
硬件设计是系统实现的基础。
我们选用了STM32F4系列单片机作为核心处理器,该单片机具有高性能、低功耗、易于编程等优点,能够满足系统对处理速度和功耗的要求。
基于STM32的智能家居红外控制系统研究与设计共3篇

基于STM32的智能家居红外控制系统研究与设计共3篇基于STM32的智能家居红外控制系统研究与设计1智能家居系统在当今社会已经得到了广泛的应用,而红外控制技术也是其中的重要一环。
本文将对基于STM32的智能家居红外控制系统进行研究与设计,主要包括系统设计方案、硬件设计、软件设计等方面的内容。
一、系统设计方案系统的整体设计方案如下:1、硬件系统设计(1)基于STM32微控制器的控制板设计。
(2)通过红外传感器采集红外信号。
(3)通过继电器实现对家居电器的远程遥控。
2、软件系统设计(1)通过编写C语言程序,实现红外信号采集、远程遥控等功能。
(2)通过TCP/IP协议实现智能家居控制,并实现移动端APP对智能家居的远程控制。
二、硬件设计基于STM32F407VG微控制器,我们设计了控制板。
控制板的主要功能是通过GPIO口采集红外信号,并实现对家居电器的远程控制。
同时,设计一组2路继电器可实现对两路不同设备的控制。
此外,我们在控制板中加入了W5500以太网模块,以实现智能家居系统的远程控制。
它支持TCP/IP协议,可将设备与云端进行通信。
三、软件设计在软件方面,我们采用Keil软件开发环境,通过编写C语言程序实现各项功能。
红外信号采集:通过GPIO口的中断方式方便地实现对红外信号的采集。
远程控制:通过电路板上的两个继电器实现对家庭电器的控制。
使用TCP/IP协议实现控制面板与PC、手机等设备的远程控制通信。
移动端APP设计:手机APP通过连接TCP/IP协议,实现对家居设备的遥控。
APP采用Android平台进行开发,具有简单、易操作、界面友好等特点。
四、系统实现效果对系统进行实际测试,能够实现对家庭电器的控制。
在APP上,用户可以实时查看设备状态,并可对设备进行控制。
本系统能实现智能家居的简易、实用、高效的控制,满足用户的基本需求。
综上所述,本文对基于STM32的智能家居红外控制系统进行了研究与设计,详细分析了硬件系统和软件系统的设计,通过实际测试验证了系统的实现效果,证明本系统能够实现对家庭电器的控制,而且使用方便,界面友好,具有很高的实用价值。
stm32的lwip的skocet编程
stm32的lwip的skocet编程STM32是一种广泛应用于嵌入式系统开发的微控制器系列,而lwIP (light-weight IP) 是一个轻量级的开源TCP/IP协议栈,具有高度可移植性和灵活性。
在STM32的嵌入式系统中,使用lwIP库进行网络通信是一种常见的选择。
本文将介绍如何使用lwIP的socket编程在STM32上实现网络通信。
我们需要在STM32上配置lwIP库。
lwIP提供了一些示例代码,可以帮助我们快速上手。
我们可以从lwIP的官方网站上下载最新的版本,并解压缩到工程目录中。
然后,在工程的配置文件中引入lwIP 的头文件和源文件,并配置相应的宏定义。
在进行socket编程之前,我们需要先初始化lwIP协议栈。
在main 函数中,我们可以调用lwIP库提供的初始化函数进行初始化。
初始化完成后,我们可以创建一个socket套接字,用于后续的网络通信。
接下来,我们可以使用socket套接字进行网络通信。
在lwIP中,socket套接字使用整数来表示。
我们可以使用lwIP库提供的函数来创建套接字,并指定相应的协议类型,例如TCP或UDP。
创建套接字后,我们可以使用该套接字进行数据的发送和接收。
在进行数据发送时,我们可以使用lwIP库提供的send函数。
该函数可以将数据发送到指定的目标地址和端口号。
在发送数据之前,我们需要先创建一个目标地址结构体,并填写相应的信息。
然后,我们可以调用send函数发送数据。
在进行数据接收时,我们可以使用lwIP库提供的recv函数。
该函数可以从指定的套接字接收数据,并保存到指定的缓冲区中。
在接收数据之前,我们需要先创建一个接收缓冲区,并指定相应的长度。
然后,我们可以调用recv函数接收数据。
除了发送和接收数据外,我们还可以使用lwIP库提供的其他函数来实现更多的功能。
例如,我们可以使用lwIP库提供的gethostbyname函数来获取指定主机名对应的IP地址。
简述tcp协议可靠传输实现方式

简述tcp协议可靠传输实现方式
TCP(Transmission Control Protocol)是一种面向连接的、可
靠的传输协议。
它通过一系列的机制来实现可靠传输,以下是一些主要的实现方式:
1. 序列号和确认机制:TCP协议通过给每个传输的数据包分
配一个序列号,接收方收到数据包后会发送一个确认序列号,发送方根据这个确认序列号来确认数据是否被有效接收。
如果发送方没有收到确认消息,则会重新发送数据。
2. 超时重传:如果发送方在一定时间内没有收到对方的确认消息,就会认为数据包丢失,然后会重传数据包。
发送方会根据网络情况动态调整超时时间,以适应不同的网络环境。
3. 流量控制:TCP使用滑动窗口技术控制数据流量,接收方
会告知发送方它的接收窗口大小,发送方根据接收方的窗口大小控制发送速率,以避免发送过多的数据导致对方无法及时处理。
4. 拥塞控制:TCP通过拥塞窗口算法来控制发送方的发送速率,当网络发生拥塞时,发送方会减小发送速率以避免拥堵情况进一步恶化。
拥塞控制是TCP协议中最重要的特性之一,
它通过一些算法如慢启动、拥塞避免、快速恢复等来实现。
5. 错误校验和重传:TCP在数据包头部添加了一个校验和字段,接收方可以通过校验和来检测有无数据传输过程中的错误。
如果发现错误,接收方会要求发送方重传数据。
这些方式相互协作,使得TCP协议能够在不可靠的网络环境中实现可靠的数据传输。
在STM32F407板子上搭建TCP服务器及TFTP服务器

掉落的枫叶像老工程师的笔记经验 我打开夜灯照亮岁末的秋天 晚霞
掠过天边 北风掠过工作台的桌面 我把努力融进了落叶 想换来熟悉的那些肯 定的笑颜 STM32F407 开发板(带以太网) ,板子上的 PHY 为 LAN8720A,没有 开发平台
Start 开始监听 挂载客户端连接回调函数 TFTP 初始化成功 Static IP address: 192.168.0.120 可以通过上面的 TCP 服务器测试步骤来测试 TCP 服务器功 能,正常测试,工作正常,ping 也能通
轮),点击 OK。再点右上方的黄色齿轮即可生成工程代码。 工程代码 1、TCP Server 的实现
大致流程:先新建一个 TCB_PCB、开始监听、挂载客户端连接请求 看起来代码很多,其实真的不复杂。
ቤተ መጻሕፍቲ ባይዱ
回调函数、挂载接收数据回调函数、挂载发送完成回调函数、挂载出错回调 函数、挂载心跳包回调函数、关闭连接等,最重要的是释放内存!每收到一 个数据链,它已经被申请了内存,所有在处理完这个数据后一定要释放。 2、TCP 服务器测试用网络调试助手连接 TCP 服务器(两者必须在一
407ZG,在右侧会显示 STM32F407ZGT6 的 MCU 列表,选择此列表,双 击。设置时钟源为外部时钟开启 SWD 调试接口,开启 ETH 外设,选择 RMII 接口(LAN8720A 为 RMII 接口) ,中间件里时能 LWIP。使用 RMII 接 口的时候软件会自动配置对应的引脚,但是一定要仔细对比软件配置的引脚 是否为板子上硬件所连接的。 原子 F407 板子上的 LAN8720A 的 RMII 接口引脚如下图,
个网关里面,192.168.000.XXX) ,网络调试助手里选择 TCP 客户端,远程主 机 IP 为 192.168.0.120 , 端口号为 7 通过测试,则表示 TCP 服务器已经完成。您也可以通过手机连接这个 详细测试步骤请点击阅读原文下载。
stm32的tcp接收函数的用法

stm32的tcp接收函数的用法一、引言TCP(传输控制协议)是一种面向连接的协议,用于在主机之间进行可靠的数据传输。
在嵌入式系统中,使用TCP协议可以方便地实现远程控制、数据采集等功能。
本文将介绍在STM32平台上如何使用TCP 接收函数。
二、准备工作在开始使用TCP接收函数之前,需要先了解TCP通信的基本原理和STM32的TCP库。
TCP通信涉及到socket编程,STM32的TCP库提供了简单易用的API,可以方便地实现TCP通信。
三、TCP接收函数的实现1.初始化TCPsocket:在使用TCP接收函数之前,需要先初始化TCPsocket。
需要指定本地IP地址、端口号和远程IP地址、端口号等信息。
2.建立连接:使用TCP库中的函数建立连接,将本地socket和远程socket连接起来。
3.接收数据:使用TCP库中的函数接收来自远程的数据。
在STM32中,可以使用循环来不断接收数据,直到接收到结束信号或超时。
4.处理数据:接收到数据后,需要对数据进行处理。
可以将数据存储在缓冲区中,然后根据需要进行解析和处理。
5.关闭连接:在处理完数据后,需要关闭连接。
可以使用TCP库中的函数来关闭socket,释放资源。
四、示例代码以下是一个简单的示例代码,用于展示如何在STM32上使用TCP 接收函数:```c#include"tcp_client.h"//包含TCP库的头文件voidtcp_receive_func(void){//初始化TCPsockettcp_socket_t*tcp_socket=tcp_init_client();if(tcp_socket==NULL){//初始化失败,处理错误}//指定本地IP地址、端口号和远程IP地址、端口号等信息tcp_connect(tcp_socket,IP_ADDR_ANY,SERVER_PORT,REMOTE_IP_ ADDR,REMOTE_PORT);//循环接收数据while(1){uint8_tbuffer[MAX_BUFFER_SIZE];//存储数据的缓冲区uint32_tbytes_received=tcp_receive(tcp_socket,buffer,MAX_ BUFFER_SIZE);//接收数据if(bytes_received>0){//处理接收到的数据//...}else{//超时或关闭连接,处理错误}}//关闭连接tcp_disconnect(tcp_socket);tcp_deinit_client(tcp_socket);//释放资源}```以上代码仅供参考,具体实现还需要根据实际需求进行修改和完善。
C语言嵌入式(stm32)应用TCP通信实例分析
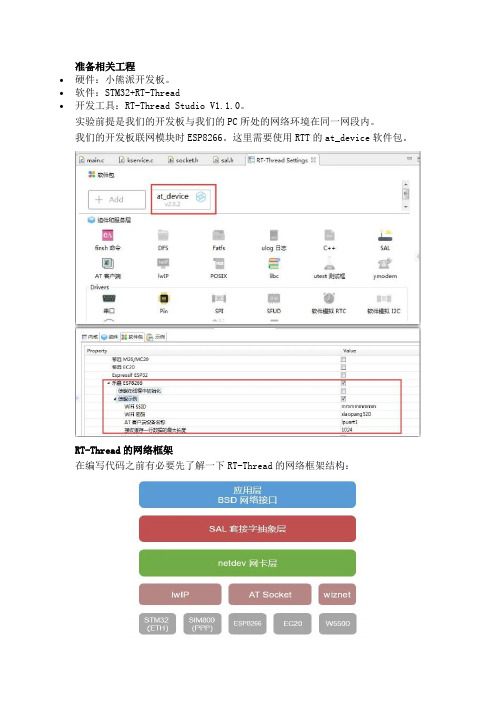
准备相关工程•硬件:小熊派开发板。
•软件:STM32+RT-Thread•开发工具:RT-Thread Studio V1.1.0。
实验前提是我们的开发板与我们的PC所处的网络环境在同一网段内。
我们的开发板联网模块时ESP8266。
这里需要使用RTT的at_device软件包。
RT-Thread的网络框架在编写代码之前有必要先了解一下RT-Thread的网络框架结构:从下往上看:第 1 层:与硬件相关的一些网络模块,这里我们用的是ESP8266。
第 2~4 层:一些中间层。
本次实验中我们可以不用深究,我们把这几层看做一个黑盒子,先不用管里面的实现。
有精力的朋友可以去研究,初学朋友暂时先别去碰,碰就是劝退。
不过也可以稍微了解一些这几层是什么。
第 2 层是协议栈层。
这些是一些轻量型的、用于嵌入式中的TCP/IP 协议栈。
第 3 层是网卡层。
通过 netdev 网卡层用户可以统一管理各个网卡信息和网络连接状态,并且可以使用统一的网卡调试命令接口。
第 4 层是SAL 套接字抽象层。
通过它 RT-Thread 系统能够适配下层不同的网络协议栈,并提供给上层统一的网络编程接口,方便不同协议栈的接入。
第 5 层应用层标准socket接口。
其提供一套标准 BSD Socket API。
所谓标准就是我们在RT-Thread应用编程中用的网络接口与在PC上进行网络编程所用的接口函数是一样的,如:有了这样的一套标准 BSD Socket API,我们的程序就可以在 PC 上编写、调试:然后再移植相关代码到 RT-Thread 操作系统上,这给我们提供了很大的便利。
其中,第4层和第5层在在代码中是用宏来关联起来的:下面开始编写测试代码,首先我们需要清楚一个TCP客户端-服务端模型:编写代码(1)编写TCP客户端代码(开发板代码)我们这里编写的客户端测试代码就是按照上面那个图来一步一步的编写的:1、创建一个socket2、连接服务端3、发送数据4、阻塞等待接收数据5、关闭连接①创建一个socket用到的接口:int socket(int domain, int type, int protocol);我们创建socket相关的代码如下:/* 创建一个socket,类型是SOCKET_STREAM, TCP类型 */if ((sock_fd = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP)) == -1) {/* 创建socket失败 */rt_kprintf("Socket error\n");return -1;}domain / 协议族类型:•AF_INET:IPv4•AF_INET6:IPv6type / 协议类型:•SOCK_STREAM:流套接字•SOCK_DGRAM:数据报套接字•SOCK_RAW:原始套接字protocol / 传输协议•IPPROTO_TCP•IPPROTO_UDP•......②连接服务端用到的接口:int connect(int s, const struct sockaddr *name, socklen_t namelen);我们连接服务端相关的代码如下:/* 从终端获取URL */url = argv[1];/* 从终端获取端口并转为无符号数据 */port = strtoul(argv[2], 0, 10);/* 通过函数入口参数url获得host地址(如果是域名,会做域名解析) */host = gethostbyname(url);/* 初始化预连接的服务端地址 */server_addr.sin_family = AF_INET;server_addr.sin_port = htons(port);server_addr.sin_addr = *((struct in_addr *)host->h_addr);rt_memset(&(server_addr.sin_zero), 0, sizeof(server_addr.sin_zero));/* 连接到服务端 */if (connect(sock_fd, (struct sockaddr *)&server_addr, sizeof(struct sockaddr)) == -1) {/* 连接失败 */rt_kprintf("Connect fail!\n");closesocket(sock_fd);return -1;}else{/* 连接成功 */rt_kprintf(">>>>>>>>>>>>Connect server(%s %d) success!\n", url, port); }③发送数据用到的接口:int send(int s, const void *dataptr, size_t size, int flags);我们发送数据相关的代码如下:/* 发送数据 */if (send(sock_fd, argv[3], strlen(argv[3]), 0) < 0){/* 发送失败,关闭这个连接 */closesocket(sock_fd);rt_kprintf("\nsend error,close the socket.\r\n");}else{/* 发送成功 */rt_kprintf(">>>>>>>>>>>>Send data(%s) to server success!\n", argv[3]); }④接收数据用到的接口:int recv(int s, void *mem, size_t len, int flags);我们接收数据的相关代码如下:/* 等待服务端发送过来的数据 */if (recv(sock_fd, recv_buf, 100, 0) < 0){/* 接收失败,关闭这个连接 */closesocket(sock_fd);rt_kprintf("\nreceived error,close the socket.\r\n");}else{/* 接收成功,打印收到的数据 */rt_kprintf(">>>>>>>>>>>>Recv data from server: %s\n",recv_buf); }⑤关闭连接用到的接口:int closesocket(int s);(2)编写TCP服务端代码(PC机)这里提供的是Windows环境下的TCP服务端程序代码,编写思路也是按照上面的TCP客户端-服务端模型来的,相关接口就不详细列举了,直接贴代码吧:/* 程序:Windows环境下的TCP服务端程序gcc编译命令:gcc tcp_server.c -lwsock32 -o tcp_server.exe*/#include <stdio.h>#include <winsock2.h>#define BUF_LEN 100int main(void){WSADATA wd;SOCKET ServerSock, ClientSock;char Buf[BUF_LEN] = {0};SOCKADDR ClientAddr;SOCKADDR_IN ServerSockAddr;int addr_size = 0, recv_len = 0;/* sock需要 */WSAStartup(MAKEWORD(2,2),&wd);printf("===============这是一个TCP服务端程序==============\n");/* 创建服务端socket */if (-1 == (ServerSock = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP))){printf("socket error!\n");exit(1);}/* 设置服务端信息 */memset(&ServerSockAddr, 0, sizeof(ServerSockAddr)); // 给结构体ServerSockAddr清零ServerSockAddr.sin_family = AF_INET; // 使用IPv4地址ServerSockAddr.sin_addr.s_addr = inet_addr("192.168.1.101");// 本机IP地址ServerSockAddr.sin_port = htons(1314); // 端口/* 绑定套接字 */if (-1 == bind(ServerSock, (SOCKADDR*)&ServerSockAddr, sizeof(SOCKADDR))){printf("bind error!\n");exit(1);}/* 进入监听状态 */if (-1 == listen(ServerSock, 10)){printf("listen error!\n");exit(1);}addr_size = sizeof(SOCKADDR);while (1){/* 监听客户端请求,accept函数返回一个新的套接字,发送和接收都是用这个套接字 */if (-1 == (ClientSock = accept(ServerSock, (SOCKADDR*)&ClientAddr, &addr_size))) {printf("socket error!\n");exit(1);}/* 接受客户端的返回数据 */int recv_len = recv(ClientSock, Buf, BUF_LEN, 0);printf("客户端发送过来的数据为:%s\n", Buf);/* 发送数据到客户端 */send(ClientSock, Buf, recv_len, 0);/* 关闭客户端套接字 */closesocket(ClientSock);/* 清空缓冲区 */memset(Buf, 0, BUF_LEN);}/*如果有退出循环的条件,这里还需要清除对socket库的使用*//* 关闭服务端套接字 *///closesocket(ServerSock);/* WSACleanup();*/return 0;}验证、分析1、PC端自验证我们使用我们自己用C语言编写的客户端、服务端程序进行验证:2、STM32<-->PC(1)STM32作为客户端,与PC端我们自己编写的服务端程序进行通信。
基于STM32的以太网通信模块设计

基于STM32的以太网通信模块设计引言以太网通信是当今许多嵌入式系统中不可或缺的一部分。
它提供了快速、安全和可靠的数据传输方式,使得设备能够与其他设备或云服务进行通信。
STM32是常用的嵌入式系统开发板,具有强大的处理能力和丰富的外设接口,非常适合用于以太网通信模块的设计。
本文将介绍如何基于STM32设计一个简单的以太网通信模块。
1.系统架构设计在设计以太网通信模块之前,首先需要了解整个系统的架构。
一般来说,以太网通信模块由硬件和软件两部分组成。
硬件部分主要包括STM32开发板和以太网PHY芯片。
以太网PHY芯片负责将数字信号转换为模拟信号,并通过以太网接口与外部网络连接。
STM32开发板通过接口与PHY芯片进行通信,并负责处理网络数据的收发。
软件部分主要包括驱动程序和网络协议栈。
驱动程序负责与PHY芯片进行通信,控制数据的收发。
网络协议栈实现了TCP/IP协议栈,包括IP、TCP和UDP等协议。
它负责处理数据包的组装和解析,以及网络连接的建立和断开。
2.硬件设计硬件设计主要涉及PHY芯片与STM32开发板之间的连接和接口配置。
PHY芯片通常使用RMII(Reduced Media Independent Interface)接口与STM32开发板连接。
在STM32上配置相应的引脚和寄存器,使其与PHY芯片进行通信。
为了方便调试和监测网络状态,可以在硬件设计中添加LED指示灯,显示网络连接状态。
3.软件设计软件设计主要涉及驱动程序和网络协议栈的开发。
驱动程序可以使用STM32的标准外设库进行开发。
根据PHY芯片的型号和通信接口,编写相应的驱动程序,实现数据的发送和接收。
网络协议栈可以使用第三方库,如lwIP(Lightweight IP)等。
lwIP是一个开源的TCP/IP协议栈,提供了各种网络协议的实现,支持多种硬件平台。
在软件设计时,需要根据具体需求配置网络协议栈的参数,如IP地址、子网掩码、默认网关等。
基于STM32单片机家电控制及家居环境监测系统设计与实现

基于STM32单片机家电控制及家居环境监测系统设计与实现一、本文概述本文旨在介绍一种基于STM32单片机的家电控制及家居环境监测系统的设计与实现。
该系统集成了家电控制、环境监测和数据处理等功能,旨在为用户提供智能化、自动化的家居环境。
通过STM32单片机的强大性能和灵活编程,实现了对家电设备的远程控制、家居环境的实时监测以及数据的收集和处理。
本文首先将对系统的整体架构进行介绍,然后详细阐述各个功能模块的设计和实现过程,包括家电控制模块、环境监测模块、数据处理模块等。
接着,将介绍系统的软件设计和编程实现,包括控制程序的编写、数据传输和处理等。
将对系统的性能进行测试和评估,并给出相应的结论和建议。
通过本文的介绍,读者可以深入了解基于STM32单片机的家电控制及家居环境监测系统的设计与实现过程,为相关领域的研究和应用提供参考和借鉴。
二、系统总体设计本家电控制及家居环境监测系统基于STM32单片机进行设计,以实现家电的智能控制和家居环境的实时监测。
系统总体设计包括硬件设计和软件设计两部分。
硬件设计是系统实现的基础,主要包括传感器选择、家电控制模块、数据处理模块、电源模块等。
针对家居环境的不同监测需求,选择了温湿度传感器、空气质量传感器、光照传感器等,以实现对家居环境的全面监测。
家电控制模块通过继电器或红外遥控等方式,实现对家电的远程控制。
数据处理模块选用STM32单片机,具有强大的数据处理能力和丰富的外设接口,满足系统对数据处理和传输的需求。
电源模块采用稳定可靠的电源设计,为整个系统提供稳定的电力供应。
软件设计是系统功能的实现关键,主要包括数据采集与处理、家电控制逻辑、数据通信协议等。
数据采集与处理部分,通过编写传感器驱动程序,实现对家居环境数据的实时采集和处理。
家电控制逻辑部分,根据用户设定的控制规则,编写控制算法,实现对家电的智能控制。
数据通信协议部分,采用可靠的通信协议,如Modbus或TCP/IP 等,实现系统与用户端的数据传输和交互。
STM32中的通信协议

STM32中的通信协议首先,串口通信是一种基本的串行通信协议,通过一对数据线进行传输。
STM32带有多个串口接口,包括USART、UART和LPUART。
USART接口支持同步和异步通信,具有较高的传输速度和可靠性,适用于长距离的数据传输。
UART接口支持异步通信,适用于短距离的数据传输。
LPUART接口是一种低功耗UART通信,适用于一些对功耗敏感的应用场景。
串口通信广泛应用于各种领域,如数据采集、数据传输、通信控制等。
其次,SPI(Serial Peripheral Interface)是一种同步的串行通信协议,使用四根线进行通信,包括一个主设备和一个或多个从设备。
STM32带有多个SPI接口,可以同时连接多个外设。
SPI通信速度快、通信简单,适用于高速数据传输和时序要求比较严格的场景,如存储器读写、显示屏控制和传感器数据采集等。
第三,I2C(Inter-Integrated Circuit)是一种双线制的串行通信协议,包括一个主设备和一个或多个从设备。
STM32带有多个I2C接口,可以同时连接多个外设。
I2C通信具有较低的成本和复杂度,适用于低速数据传输和多个外设之间的通信,如温度传感器、EEPROM存储器和实时时钟等。
第四,CAN(Controller Area Network)是一种分布式控制网络协议,用于在汽车电子和工业自动化等领域进行通信。
STM32带有多个CAN接口,支持高速CAN和低速CAN两种通信协议。
CAN通信具有高度的可靠性和实时性,适用于长距离的数据传输和分布式控制系统。
最后,USB(Universal Serial Bus)是一种通用的串行总线协议,用于连接电脑和外部设备。
STM32带有USB接口,可用于与电脑进行通信和传输数据。
USB通信速度快、连接简便,适用于各种外设和应用场景。
总结起来,STM32支持多种通信协议,包括串口通信、SPI、I2C、CAN和USB等。
C语言嵌入式(stm32)应用TCP通信实例分析
准备相关工程•硬件:小熊派开发板。
•软件:STM32+RT-Thread•开发工具:RT-Thread Studio V1.1.0。
实验前提是我们的开发板与我们的PC所处的网络环境在同一网段内。
我们的开发板联网模块时ESP8266。
这里需要使用RTT的at_device软件包。
RT-Thread的网络框架在编写代码之前有必要先了解一下RT-Thread的网络框架结构:从下往上看:第 1 层:与硬件相关的一些网络模块,这里我们用的是ESP8266。
第 2~4 层:一些中间层。
本次实验中我们可以不用深究,我们把这几层看做一个黑盒子,先不用管里面的实现。
有精力的朋友可以去研究,初学朋友暂时先别去碰,碰就是劝退。
不过也可以稍微了解一些这几层是什么。
第 2 层是协议栈层。
这些是一些轻量型的、用于嵌入式中的TCP/IP 协议栈。
第 3 层是网卡层。
通过 netdev 网卡层用户可以统一管理各个网卡信息和网络连接状态,并且可以使用统一的网卡调试命令接口。
第 4 层是SAL 套接字抽象层。
通过它 RT-Thread 系统能够适配下层不同的网络协议栈,并提供给上层统一的网络编程接口,方便不同协议栈的接入。
第 5 层应用层标准socket接口。
其提供一套标准 BSD Socket API。
所谓标准就是我们在RT-Thread应用编程中用的网络接口与在PC上进行网络编程所用的接口函数是一样的,如:有了这样的一套标准 BSD Socket API,我们的程序就可以在 PC 上编写、调试:然后再移植相关代码到 RT-Thread 操作系统上,这给我们提供了很大的便利。
其中,第4层和第5层在在代码中是用宏来关联起来的:下面开始编写测试代码,首先我们需要清楚一个TCP客户端-服务端模型:编写代码(1)编写TCP客户端代码(开发板代码)我们这里编写的客户端测试代码就是按照上面那个图来一步一步的编写的:1、创建一个socket2、连接服务端3、发送数据4、阻塞等待接收数据5、关闭连接①创建一个socket用到的接口:int socket(int domain, int type, int protocol);我们创建socket相关的代码如下:/* 创建一个socket,类型是SOCKET_STREAM, TCP类型 */if ((sock_fd = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP)) == -1) {/* 创建socket失败 */rt_kprintf("Socket error\n");return -1;}domain / 协议族类型:•AF_INET:IPv4•AF_INET6:IPv6type / 协议类型:•SOCK_STREAM:流套接字•SOCK_DGRAM:数据报套接字•SOCK_RAW:原始套接字protocol / 传输协议•IPPROTO_TCP•IPPROTO_UDP•......②连接服务端用到的接口:int connect(int s, const struct sockaddr *name, socklen_t namelen);我们连接服务端相关的代码如下:/* 从终端获取URL */url = argv[1];/* 从终端获取端口并转为无符号数据 */port = strtoul(argv[2], 0, 10);/* 通过函数入口参数url获得host地址(如果是域名,会做域名解析) */host = gethostbyname(url);/* 初始化预连接的服务端地址 */server_addr.sin_family = AF_INET;server_addr.sin_port = htons(port);server_addr.sin_addr = *((struct in_addr *)host->h_addr);rt_memset(&(server_addr.sin_zero), 0, sizeof(server_addr.sin_zero));/* 连接到服务端 */if (connect(sock_fd, (struct sockaddr *)&server_addr, sizeof(struct sockaddr)) == -1) {/* 连接失败 */rt_kprintf("Connect fail!\n");closesocket(sock_fd);return -1;}else{/* 连接成功 */rt_kprintf(">>>>>>>>>>>>Connect server(%s %d) success!\n", url, port); }③发送数据用到的接口:int send(int s, const void *dataptr, size_t size, int flags);我们发送数据相关的代码如下:/* 发送数据 */if (send(sock_fd, argv[3], strlen(argv[3]), 0) < 0){/* 发送失败,关闭这个连接 */closesocket(sock_fd);rt_kprintf("\nsend error,close the socket.\r\n");}else{/* 发送成功 */rt_kprintf(">>>>>>>>>>>>Send data(%s) to server success!\n", argv[3]); }④接收数据用到的接口:int recv(int s, void *mem, size_t len, int flags);我们接收数据的相关代码如下:/* 等待服务端发送过来的数据 */if (recv(sock_fd, recv_buf, 100, 0) < 0){/* 接收失败,关闭这个连接 */closesocket(sock_fd);rt_kprintf("\nreceived error,close the socket.\r\n");}else{/* 接收成功,打印收到的数据 */rt_kprintf(">>>>>>>>>>>>Recv data from server: %s\n",recv_buf); }⑤关闭连接用到的接口:int closesocket(int s);(2)编写TCP服务端代码(PC机)这里提供的是Windows环境下的TCP服务端程序代码,编写思路也是按照上面的TCP客户端-服务端模型来的,相关接口就不详细列举了,直接贴代码吧:/* 程序:Windows环境下的TCP服务端程序gcc编译命令:gcc tcp_server.c -lwsock32 -o tcp_server.exe*/#include <stdio.h>#include <winsock2.h>#define BUF_LEN 100int main(void){WSADATA wd;SOCKET ServerSock, ClientSock;char Buf[BUF_LEN] = {0};SOCKADDR ClientAddr;SOCKADDR_IN ServerSockAddr;int addr_size = 0, recv_len = 0;/* sock需要 */WSAStartup(MAKEWORD(2,2),&wd);printf("===============这是一个TCP服务端程序==============\n");/* 创建服务端socket */if (-1 == (ServerSock = socket(AF_INET, SOCK_STREAM, IPPROTO_TCP))){printf("socket error!\n");exit(1);}/* 设置服务端信息 */memset(&ServerSockAddr, 0, sizeof(ServerSockAddr)); // 给结构体ServerSockAddr清零ServerSockAddr.sin_family = AF_INET; // 使用IPv4地址ServerSockAddr.sin_addr.s_addr = inet_addr("192.168.1.101");// 本机IP地址ServerSockAddr.sin_port = htons(1314); // 端口/* 绑定套接字 */if (-1 == bind(ServerSock, (SOCKADDR*)&ServerSockAddr, sizeof(SOCKADDR))){printf("bind error!\n");exit(1);}/* 进入监听状态 */if (-1 == listen(ServerSock, 10)){printf("listen error!\n");exit(1);}addr_size = sizeof(SOCKADDR);while (1){/* 监听客户端请求,accept函数返回一个新的套接字,发送和接收都是用这个套接字 */if (-1 == (ClientSock = accept(ServerSock, (SOCKADDR*)&ClientAddr, &addr_size))) {printf("socket error!\n");exit(1);}/* 接受客户端的返回数据 */int recv_len = recv(ClientSock, Buf, BUF_LEN, 0);printf("客户端发送过来的数据为:%s\n", Buf);/* 发送数据到客户端 */send(ClientSock, Buf, recv_len, 0);/* 关闭客户端套接字 */closesocket(ClientSock);/* 清空缓冲区 */memset(Buf, 0, BUF_LEN);}/*如果有退出循环的条件,这里还需要清除对socket库的使用*//* 关闭服务端套接字 *///closesocket(ServerSock);/* WSACleanup();*/return 0;}验证、分析1、PC端自验证我们使用我们自己用C语言编写的客户端、服务端程序进行验证:2、STM32<-->PC(1)STM32作为客户端,与PC端我们自己编写的服务端程序进行通信。
基于STM32_的EtherCAT_转UDP_通信转换系统设计与实现
10Internet Communication互联网+通信以太网控制自动化技术EtherCAT 在工业自动化领域应用广泛。
在工业以太网总线技术EtherCAT 中,从站之间的通信采用分布式时钟同步机制,保证了通信的高速、低延迟、同步和确定性。
然而,EtherCAT 与工控机端的通信网络一般采用TCP/IP 协议,由于其需要建立连接和确认数据的传输,无法与EtherCAT 直接进行数据交互,导致了通信的非实时性,因此,需借用硬件介质进行通信协议转换。
伺服电机、步进电机和输入/输出口的控制过程非常复杂,任何一个控制环节出错都会造成控制系统运行不稳。
在实际产品开发中,考虑成本因素无法直接在控制系统中运行实时分析软件,而是要将相应数据实时地传输到PC 机上,通过PC 机上的数据采集、分析软件中查找、定位问题根源。
为了实现EtherCAT 与工控机端的TCP/IP 协议的互通,本文提出了一种基于UDP 协议的通信转换方案,利用UDP 协议的无连接和高带宽特点,提高通信的效率和速度,同时利用FPGA 开发的高性能TCP/IP 通信模块,保证通信的实时性和可靠性。
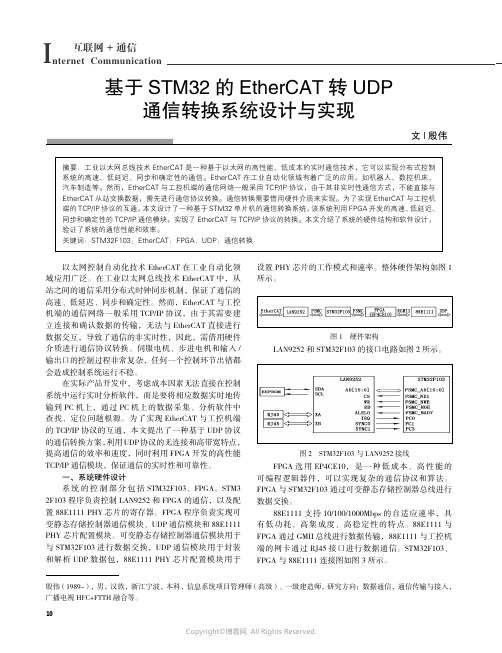
一、系统硬件设计系统的控制部分包括STM32F103、FPGA。
STM32F103程序负责控制LAN9252和FPGA 的通信,以及配置88E1111 PHY 芯片的寄存器。
FPGA 程序负责实现可变静态存储控制器通信模块、UDP 通信模块和88E1111 PHY 芯片配置模块。
可变静态存储控制器通信模块用于与STM32F103进行数据交换,UDP 通信模块用于封装和解析UDP 数据包,88E1111 PHY 芯片配置模块用于基于STM32的EtherCAT 转UDP通信转换系统设计与实现设置PHY 芯片的工作模式和速率。
整体硬件架构如图1所示。
图1 硬件架构LAN9252和STM32F103的接口电路如图2所示。
图2 STM32F103与LAN9252接线FPGA 选用EP4CE10,是一种低成本、高性能的可编程逻辑器件,可以实现复杂的通信协议和算法。
STM32F407板子上搭建TCP Server及TFTP Server
个数据链,它已经被申请了内存,所有在处理完这个数据后一定要释放。
2、TCP服务器测试用网络调试助手连接TCP服务器(两者必须在一
个网关里面,192.168.000.XXX),网络调试助手里选择TCP客户端,远程主
机IP为192.168.0.120,端口号为7
口的时候软件会自动配置对应的引脚,但是一定要仔细对比软件配置的引脚
是否为板子上硬件所连接的。
原子F407板子上的LAN8720A的RMII接口引脚如下图,
配置时钟外部高速晶振选择为8M,PLLSORCEMUX选择为
HSE,在HCLK处输入168点回车,软件会自动配置好
中间件配置这里主要配置,ETH、LWIP、串口1、GPIO
工程搭建
外设配置
打开STM32CubeMX,点NEWPROJECT,在左侧的输入框中输入
407ZG,在右侧会显示STM32F407ZGT6的MCU列表,选择此列表,双
击。设置时钟源为外部时钟开启SWD调试接口,开启ETH外设,选择
RMII接口(LAN8720A为RMII接口),中间件里时能LWIP。使用RMII接
STM32F407板子上搭建TCP Server及TFTP Server
开发平台
STM32F407开发板(带以太网),板子上的PHY为LAN8720A,没有
用到显示屏全为串口输出调试信息。
实现功能
通过STM32CubeMX在原子STM32F407板子上搭建TCPServer及
TFTP Server,实现这些功能非常简单。
Start开始监听挂载客户端连接回调函数TFTP初始化成功StaticIPaddress:
stm32f103zet6实现HTTP协议请求,UTF-8转码JSON打包上传
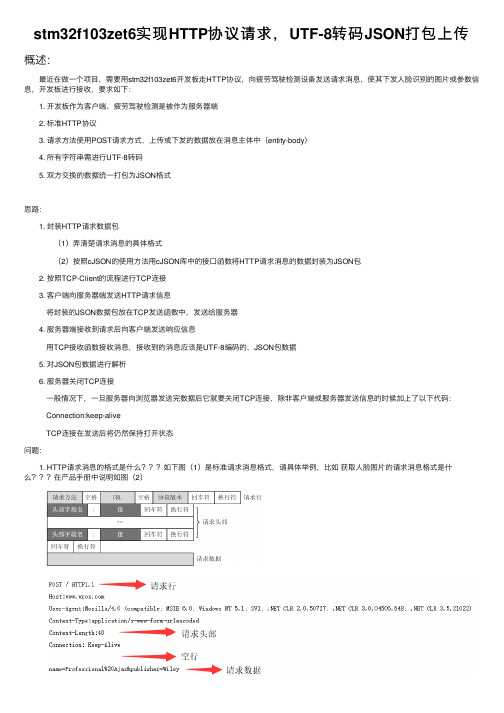
stm32f103zet6实现HTTP协议请求,UTF-8转码JSON打包上传概述: 最近在做⼀个项⽬,需要⽤stm32f103zet6开发板⾛HTTP协议,向疲劳驾驶检测设备发送请求消息,使其下发⼈脸识别的图⽚或参数信息,开发板进⾏接收,要求如下: 1. 开发板作为客户端、疲劳驾驶检测是被作为服务器端 2. 标准HTTP协议 3. 请求⽅法使⽤POST请求⽅式,上传或下发的数据放在消息主体中(entity-body) 4. 所有字符串需进⾏UTF-8转码 5. 双⽅交换的数据统⼀打包为JSON格式思路: 1. 封装HTTP请求数据包 (1)弄清楚请求消息的具体格式 (2)按照cJSON的使⽤⽅法⽤cJSON库中的接⼝函数将HTTP请求消息的数据封装为JSON包 2. 按照TCP-Client的流程进⾏TCP连接 3. 客户端向服务器端发送HTTP请求信息 将封装的JSON数据包放在TCP发送函数中,发送给服务器 4. 服务器端接收到请求后向客户端发送响应信息 ⽤TCP接收函数接收消息,接收到的消息应该是UTF-8编码的,JSON包数据 5. 对JSON包数据进⾏解析 6. 服务器关闭TCP连接 ⼀般情况下,⼀旦服务器向浏览器发送完数据后它就要关闭TCP连接,除⾮客户端或服务器发送信息的时候加上了以下代码: Connection:keep-alive TCP连接在发送后将仍然保持打开状态问题: 1. HTTP请求消息的格式是什么???如下图(1)是标准请求消息格式,请具体举例,⽐如获取⼈脸图⽚的请求消息格式是什么???在产品⼿册中说明如图(2) (1) (2) 2. 知道了具体的请求消息格式后, (1)是否先需要造⼀个请求消息的字符串数组,然后再将该字符串数组进⾏UTF-8编码???,然后再将该UTF-8编码后的数据进⾏JSON封装??? (2)或是直接使⽤cJSON数据库按照请求消息格式封装⼀个请求消息的JSON包,然后再将该JSON包进⾏UTF-8转码??? 3. 针对第2个问题中的(1)(2)两点: (1)UTF-8编码后的数据进⾏JSON封装后,是否还需要转化成普通的字符串数据后,再通过TCP发送函数发送给服务器??? (2)先JSON封转再进⾏UTF-8转码后,是直接通过TCP发送函数发送,还是需要再转化成普通字符串数据后再通过tcp发送函数发送给服务器??? 4. 服务器响应客户端后,是否直接关闭TCP连接,还是在客户端发送请求消息的时候添加以下代码保持TCP连接??? Connection:keep-alive 。
TCPIP协议学习(三)STM32中ETH驱动配置注意事项

TCPIP协议学习(三)STM32中ETH驱动配置注意事项1.MII/RMII/SMI接⼝连接和配置SMI⼜称站点管理接⼝,⽤于cpu与外置PHY芯⽚通讯,配置相关参数,包含MDC和MDIO两个管脚(CPU上有对应引脚,当然⽤普通GPIO⼝模拟SMI管理也是可⾏的,不过按照固定时序写⼊和读取数据)。
‘ MII和RMII则是是两种不同的以太⽹数据传输接⼝,因为RMII在使⽤更少接⼝的情况下具有MII相同的功效,其中MII如下图连接即可:特别注意:RMII模式下REF_CLK要连接CPU的MCO引脚,且MCO输出时钟应为50MHz。
这⾥说下我最近遇到的stm32在MII模式不能正常接收数据,后来发现是STM的MII_ER脚被配置成以太⽹引脚,⽽实际悬空(并未连接到PHY),导致stm32认为接收出错,将接收数据丢失。
解决办法: 如果硬件还未完成设计,则MII_ER最好正确连接到PHY指定端⼝,可以提前过滤mac⼦层检测到的错误包。
如果硬件设计已经完成,且出错,那么就取消MII_ER引脚的配置即可(带来的后果就是少⼀层错误过滤,问题不⼤)2.PHY初始化 ⼀般来说,stm32外部驱动PHY芯⽚有两种连接⽅式,MII和RMII总线,这个与硬件设计有关,不过stm32芯⽚⼀般都⽀持这两种总线连接⽅式,因为RMII总线在传输效果不变的情况下占⽤接⼝更少,因此⼀般推荐RMII⽅式. 以DP83848芯⽚为例:从上⾯可以看出RMII总线对应的输⼊时钟要设置为50MHZ,当然这与你原理图的布线有,连接PHY芯⽚X1接⼝对应GPIO接⼝的外设区域时钟就要设定为该值,考虑到挂在同区域外设的时钟要求.为了⽅便设计,对于stm32f207vet6(我⽤的芯⽚),将系统时钟从120MHz改为100MHz,该区域外设时钟设置为1/2即可。
对于stm32f107vc则需要通过PLL3将MCO端⼝时钟拉⾼到50Mhz输出到phy。
基于STM32单片机的智能家居无线通信系统的设计与实现
2、无线通信模块软件设计
无线通信模块软件同样采用C语言编写,基于IAR Embedded Workbench开发 环境进行开发。无线通信模块软件主要负责网络的建立、数据的发送和接收等功 能。无线通信模块通过串口与主控单元进行通信,接收主控单元发送的数据并发 送给其他设备,同时接收其他设备发送的数据并发送给主控单元。
在传感器和执行器的选择上,考虑到系统的稳定性和可靠性,选用了一些具 有较高性能和较好口碑的厂商和型号。例如,温度传感器选用DS18B20,湿度传 感器选用HUMIMOIST-11,光照传感器选用TSL2561,执行器则根据控制信号的类 型和功率需求进行选择,如继电器、步进电机等。
2、软件设计软件部分采用C语言进行编写,主要分为以下几个模块:
STM32单片机作为整个系统的核心,需要具备高处理能力、低功耗、丰富的 外设等特点。因此,在硬件设计中,选用STM32F103C8T6型号的单片机作为主控 芯片。该芯片具有64KB的闪存和20KB的SRAM,同时具有丰富的外设,如UART、 SPI、I2C等通信接口,以及16位ADC和16位DAC模块。
在系统测试方面,我们对温度、湿度、光照等传感器的精度和稳定性进行了 测试,以及对其控制的精确性和及时性进行了评估。测试结果表明,本系统可以 有效地实现家居设备的智能控制,而且具有传输距离远、功耗低、稳定性高等优 点。
总的来说,基于STM32单片机的无线智能家居控制系统的设计和实现为用户 提供了方便、智能、高效的生活方式。然而,系统的进一步完善和优化仍然是必 要的,特别是在如何提高传感器的精度和系统的稳定性方面。未来的研究可以集 中在如何提高系统的集成度和智能化程度,以实现更加便捷和高效的智能家居生 活。
在系统实现方面,我们采用了LoRa协议进行无线通信。LoRa协议具有传输距 离远、功耗低、抗干扰能力强等优点,非常适合于智能家居控制系统的实现。我 们通过串口通信的方式,实现了STM32单片机与LoRa模块之间的数据传输。同时, 我们还利用了云平台进行数据的远程传输和监控,使得用户可以通过手机APP随 时随地控制家居设备。
stm32关于wifi模块的例程源码,基于tcp协议
stm32关于wifi模块的例程源码,基于tcp协议1.引言随着物联网的快速发展,无线通信技术成为连接设备的重要手段之一。
而在无线通信中,Wi-F i模块作为一种常用的无线设备,被广泛应用于各种领域。
本文将介绍使用s tm32单片机编写的基于TC P协议的W i-F i模块例程源码,以帮助读者理解和应用Wi-Fi模块的相关知识。
2.例程概述本例程通过TC P协议实现了s tm32与W i-Fi模块的通信。
在例程中,s t m32作为客户端发送指令给W i-F i模块,Wi-F i模块作为服务器接收指令并反馈响应。
通过阅读本例程源码,读者可以了解如何使用s tm32与W i-Fi模块进行基于TC P协议的通信。
3.硬件准备在使用本例程前,需要准备以下硬件设备:-s tm32单片机开发板-W i-Fi模块-串口转US B模块-杜邦线4.环境配置4.1安装开发工具首先,需要安装s tm32开发工具,如Kei l MD K。
具体安装步骤可参考官方文档。
4.2配置串口将W i-Fi模块的串口输出与st m32开发板的串口进行连接,并通过串口转US B模块连接到计算机。
确保串口设置正确,并能够成功与Wi-F i 模块进行通信。
5.源码解读以下是本例程的主要源码:#i nc lu de"s tm32f10x.h"#i nc lu de"s td io.h"#d ef in eW IF I_UA RTU S AR T1v o id WI FI_I ni t(voi d){//初始化W i-Fi模块}v o id WI FI_S en dD ata(co ns tc ha r*da ta){//发送数据给W i-Fi模块}v o id WI FI_R ec ei veD a ta(c ha r*da ta){//接收Wi-F i模块的数据}i n tm ai n(vo id){c h ar re ce iv eB uf fer[256];W I FI_I ni t();w h il e(1){W I FI_S en dD at a("He l lo,W i-Fi!");W I FI_R ec ei ve Da ta(r ec ei ve Bu ff er);p r in tf("Re ce iv edd a ta:%s\n",r ec eiv e Bu ff er);//停顿一段时间f o r(in ti=0;i<10000000;i++){//等待}}}本例程主要包含了以下几部分内容:5.1硬件初始化在`WI FI_I ni t`函数中,对W i-F i模块进行初始化设置,包括波特率、数据位、停止位等参数的配置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
竭诚为您提供优质文档/双击可除stm32,tcp协议实现篇一:基于stm32的串口服务器web功能实现基于stm32web功能实现编制:陈志磊校对:审核:日期:20xx-12-30版本:V1.0的串口服务器说明:本文主要说明通过web访问来配置串口服务器参数的功能,前提要求lwip和ucosii都已移植成功。
实现b/s结构,须将串口服务器配置为webserver。
一.webserver文件以及相关技术简介1.相关文件说明st公司的官网上提供了通过lwip完成webserver配置的例程,打开我们的工程文件夹“lwip1.4.1移植stm32V1.8”,在lwip-app/web_server_demo文件夹下的文件如图所示:各个文件的说明见下表:2.网页制作及网页数组数据转换(1)网页制作使用dreamweaver进行网页制作,交互方式主要是通过表单来完成,注意对于使用了需要使用ssi技术来嵌入数据的,需要将网页后缀设为shtml、shtm、stm等。
st的例程默认使用首页索引在httpd.c中g_psdefaultFilenames[]数组里表示,该数组如下:constdefault_filenameg_psdefaultFilenames[]={{"/ind ex.shtml",false},{"/index.ssi",true},{"/index.shtm" ,true},{"/index.html",false},{"/index.htm",false}};该数据表示支持首页索引为index.shtml、index.html、index.htm的网页文件输入。
在网页设计时,需考虑以下两个方面:a.表单的操作设计,表单提交的方法为post,表单的处理设为对应的cgi。
b.ssi标签的嵌入。
在需要嵌入信息的位置插入ssi标签。
关于cgi和ssi稍后将会简要说明。
(2)网页数组数据转换在makefsdata文件夹下的fs文件为网页源文件,如下图:由于网页源文件不能直接放到stm32里面,所以要做一个转换,这里通过makefsdata.exe这个工具将原始网页文件转换成.c格式的网页数组,这样就可以添加到工程中了,makefsdata是用来将编辑好的网页文件转换成二进制数的一个工具。
接下来我们讲解一下这个工具的使用方法下面我们讲解makefsdata工具的使用。
(1)新建一个名为fs的文件夹,将编辑好的网页源文件放到fs文件夹下,里面包含了编辑好的html和.shtml等网页文件,其中image文件夹里面是我们使用到的图片。
(2)将fs文件夹和makefsdada.exe工具放到同一文件夹下,此处为makefsdata文件夹,打开makefsdata文件夹,如下图所示。
图中的echotool.exe 和tftpd32-3.51-setup.exe为其他工具,这里没有使用到,cmd.reg稍后我们会讲到。
(3)在makefsdata文件夹上点击鼠标右键,然后点击”在此位置打开cmd”选项,打开后结果如图所示。
此时会打开一个cmd命令窗口。
如果点击右键没有”在此位置打开cmd”选型的话,请使用makefsdata文件夹下的cmd.reg文件导入注册表注册,双击打开cmd.reg,然后一路确定下去就可以了。
(4)在打开的cmd命令窗口中输入:makefsdata–i命令,按回车键。
就会生成fsdata.c文件,将该文件拷贝到web_server_demo文件下,然后以头文件的方式包含到工程中即可。
3.cgi技术简介公共网关接口cgi(commongatewayinterface)是www技术中最重要的技术之一,有着不可替代的重要地位。
cgi是外部应用程序与web服务器之间的接口标准,是在cgi程序和web服务器之间传递信息的规程。
cgi规范允许web服务器执行外部程序,并将它们的输出发送给web浏览器,cgi 在物理上是一段程序,运行在服务器上,提供同客户端html 页面的接口。
绝大多数的cgi程序被用来解释处理来自表单的输入信息,并在服务器产生相应的处理,或将相应的信息反馈给浏览器,cgi程序使网页具有交互功能。
比如通过web来处理提交的数据,用的就是cgi技术。
cgi示意图如下:4.ssi技术简介服务器端嵌入:serversideinclude,是一种类似于asp 的基于服务器的网页制作技术。
大多数的web服务器等均支持ssi命令。
将内容发送到浏览器之前,可以使用“服务器端包含(ssi)”指令将文本、图形或应用程序信息包含到网页中。
例如,可以使用ssi包含时间/日期戳、版权声明或供客户填写并返回的表单。
对于在多个文件中重复出现的文本或图形,使用包含文件是一种简便的方法。
将内容存入一个包含文件中即可,而不必将内容输入所有文件。
通过一个非常简单的语句即可调用包含文件,此语句指示web服务器将内容插入适当网页。
而且,使用包含文件时,对内容的所有更改只需在一个地方就能完成。
因为包含ssi指令的文件要求特殊处理,所以必须为所有ssi文件赋予ssi文件扩展名。
默认扩展名是.stm、.shtm和.shtml。
ssi是为web服务器提供的一套命令,这些命令只要直接嵌入到html文档的注释内容之中即可。
如:就是一条ssi指令,其作用是将"info.htm"的内容拷贝到当前篇二:stm32F407_dp83848_lwip移植方法前段时间做项目用到百兆网通信,用到了lwip,一开始是参照原子的例程做移植,因为原子的例程中使用的是lan8720,为了改成dp83848,改寄存器地址,改位定义,改速度计算公式,折腾了好多天也没成功,最后只好听从网友的建议,修改st官方的一个例程,几天下来,竟然成功了,现在将步骤分享给大家,感觉实际工程中用dp83848的还是大多数..其实本文并不是移植lwip,只是将st官方的例程改成我们项目所需要的,然后我们再在这个基础上完成自己的项目即可,这对新接触lwip又急着做项目的人比较适合,没必要去了解lwip的具体实现,会用就行了..本文作者:武汉普创科技--易宇--转载请注明出处本人的项目配置:stm32F407Vet6+dp83848c1、从官方网站/retype/zoom/893d349a6c175f0e7dd1373epn=1/*displaymessageonthelcd*/lcd_displaystringline(line5,(uint8_t*)"networkcable is");lcd_displaystringline(line6,(uint8_t*)"notconnected ");/*setthelcdtextcolor*/lcd_settextcolor(white);再编译就没有问题了。
8、按电路图修改时钟,修改stm32f4xx.h中宏定义标识符hse_Value的值为我们的外部时钟20mhz设置主pll时钟,在system_stm32f4xx.c文件开头的地方配置所以我们的主pll时钟为:pll=20mhz*n/(m*p)=20mhz*336/(20*2)=168mhzsysteminit()函数中设置的系统时钟大小:sysclk(系统时钟)=168mhzahb总线时钟(hclk=sysclk)=168mhzapb1总线时钟(pclk1=sysclk/4)=42mhzapb2总线时钟(pclk2=sysclk/2)=84mhzpll主时钟=168mhz9、这个例程默认的是stm324xg_eVal开发板,它使用的主芯片是stm32F407ig,而我们项目所使用的主芯片是stm32F407Ve,要更改芯片配置。
篇三:基于stm32的嵌入式无线遥控系统的设计与实现基于stm32的嵌入式无线遥控系统的设计与实现作者:关键词:远程遥控,stm32,wiFi,嵌入式系统摘要:随着无线局域网技术的快速发展,无线终端已融入我们的生活,无论是智能手机还是笔记本,wiFi功能是必不可少。
在智能化背景下的21世纪,许多“基于物联网技术”的产品已经悄悄进入生活中,众多基于aRm (acornRiscmachine)内核以及其他内核技术的产生,极大的扩充了智能控制领域。
本次设计,设计完成了一个主体采用stm32(由意法半导体集团开发设计)开发板以及atk-Rm04-wiFi(高性能uaRt-eth-wiFi模块)通信模块,利用控制端pc机或者手机,通过wiFi远程操控设备,实现一个对象对多个对象的控制系统,其成本低廉。
通过pc机/手机客户端向stm32发送特定指令让与stm32连接的步进电机以指定速度转动指定角度。
本设计的程序非常精简,操作起来简便易行。
0.1设计背景在智能化背景下的21世纪,物联网技术已经开始成为着重研究的技术。
物联网,顾名思义,就是物物相连的互联网。
利用局部网络或互联网等通信技术把传感器、控制器、机器、人员和物等通过新的方式联在一起,形成人与物、物与物相联,实现信息化、远程管理控制和智能化的网络。
物联网是互联网的延伸,它包括互联网及互联网上所有的资源,兼容互联网所有的应用。
0.2设计概述本设计是针对物联网中远程遥控方面进行研究,实施之初,通过调研市场,了解了市场上某些同类产品的优劣势,希望通过比对,了解各产品,并对其某些不足方面进行深化和改进。
经过市场调研,了解到众多现有产品有非常明显的缺陷,只能单对单的控制,不能实现一个遥控器实现多个开关的控制,有部分能够实现多对多控制的,但相对的,成本非常高。
本设计鉴于以上市面上遥控产品的缺陷,进行改进。
主体采用s0tm32开发板以及atk-Rm04-wiFi通信模块,利用控制端pc机或者手机,通过wiFi远程操控设备,实现一个对象对多个对象的控制。
0.3设计目的及其应用通过对于市面上遥控产品的缺陷,进行改进,本文实现。