液压挖掘机行走装置设计
液压挖掘机行走装置设计

摘要改革开放的进步,大大宽阔了我国的机械行业,挖掘机相关的生产制造技术与世界的差距日益缩小。
挖掘机在道路、矿区等施工领域,在房屋、高大雕像建设等领域都是应用最广泛的工程机械,随着经济科技的发展,挖掘机起着越来越重要的作用。
在动力装置、行走装置、工作装置里,本课题设计了当中的行走装置。
在这个基础上,对履带式液压挖掘机行走装置包括“四轮一带”、减速器总成、机架、张紧机构等零部件进行了设计,介绍了液压挖掘机在国内外的发展状况,并分析了发展落后的原因,对关键零部件进行了介绍,选型并设计计算。
关键词:机械液压挖掘机行走装置四轮一带张紧机构AbstractThe progress of reform and opening up has greatly widened the machinery industry in our country, and the gap between excavator-related production and manufacturing technologies and the world is narrowing day by day. Excavators are widely used in construction fields such as roads, mining areas, houses, tall statues and other fields. With the development of economic science and technology, excavators are playing an increasingly important role.Among the power device, walking device and working device, the walking device is designed in this topic. On this basis, the crawler-type hydraulic excavator traveling device including "four wheels and one belt", reducer assembly, frame, tensioning mechanism and other parts are designed, the development status of hydraulic excavator at home and abroad is introduced, the reasons for backward development are analyzed, the key parts are introduced, the selection and design calculation are carried out.Key words: machinery Walking Device of Hydraulic Excavator目录摘要 (I)Abstract.............................................................................................................................. I I 第1章绪论 (1)1.1引言 (1)1.2本课题的研究意义 (1)1.3挖掘机的发展状况 (2)1.3.1国外发展状况 (2)1.3.2国内发展状况 (2)1.4研究方案 (3)1.4.1成果标准 (3)1.4.2 研究内容 (4)1.4.3研究方法 (4)1.4.4选题的预期成果 (4)1.5本章小结 (4)第2章履带式挖掘机行走装置的总体设计方案 (5)2.1课题设计的总体设计原则 (5)2.2行走装置的分析与选择 (5)2.3履带式行走装置工作原理 (6)2.4本章小节 (6)第3章重要零部件的设计 (7)3.1履带 (7)3.1.1作用和布置方式 (7)3.1.2 确定履带的宽度b,履带支撑面长度L0 (8)3.1.3 确定履带节距t0 (9)3.1.4 确定履带的带长L (9)3.1.6转台离地高度h1 (10)3.1.7 履带板的强度计算及校核 (10)3.2 驱动轮 (11)3.2.1驱动轮的作用和装配及选型 (11)3.2.2 主要尺寸参数 (11)3.2.3 驱动轮的强度计算 (13)3.3 轮边减速器 (14)3.3.1轮边减速器的选型 (14)3.3.2行星齿轮传动比计算 (14)3.4液压马达的主要参数 (15)3.5 支重轮 (18)3.5.1支重轮的介绍 (18)3.5.2 个数的确定 (19)3.5.4 轮与轴的强度及其检验 (20)3.6 托链轮 (21)3.6.1 托链轮的作用和布置方式 (21)3.6.2托链轮个数 (22)3.7 导向轮 (22)3.7.1 导向轮的作用和布置方式 (22)3.7.2 导向轮轴的强度计算及校核 (23)3.8 张紧装置 (23)3.8.1 张紧机构的作用和布置方式 (23)3.8.2确定张紧机构型号和材料 (24)3.9 行走架的结构设计和选型 (24)4.0本章小节 (25)第4章行走装置的数据计算和验证 (25)4.1行走装置挖掘力范围的确定 (25)4.2行走装置的最大转弯力矩 (25)4.3挖掘机受到的阻力 (26)4.4挖掘机的牵引力 (27)结论 ................................................................................................... 错误!未定义书签。
掘进机行走机构的液压系统设计
掘进机行走机构的液压系统设计
简介
本文档旨在介绍掘进机行走机构的液压系统设计。
液压系统在
掘进机的行走过程中扮演着重要的角色,确保机器的稳定运行和高
效工作。
液压系统的组成
掘进机的液压系统主要由液压泵、液压马达、液压缸等组件组成。
其中液压泵负责将液压油压力加大,液压马达将液压能量转化
为机械能,液压缸则用于对行走机构进行动力驱动。
液压系统的设计
在设计掘进机行走机构的液压系统时,需要考虑以下几个方面:
1. 负载需求:根据掘进机的行走负载需求,选择合适的液压泵
和液压马达。
考虑负载的大小、速度和频率等因素,确保液压系统
可以提供足够的动力。
2. 系统的可靠性:液压系统的可靠性对于掘进机的安全运行至
关重要。
在设计过程中,应选择优质的液压元件,并确保系统的密
封性能良好。
3. 能效优化:掘进机行走过程中的能耗是一个重要的考虑因素。
在设计液压系统时,可以采用变量泵供油系统,通过根据负载需求
调整流量,来提高整体能效。
4. 系统保护:为了保护液压系统,防止因过载或其他异常情况
而损坏,可以添加液压阀、传感器以及报警装置等。
确保在出现异
常情况时可以及时采取相应措施。
结论
掘进机行走机构的液压系统设计是确保掘进机稳定运行和高效
工作的关键。
在设计过程中,需要考虑负载需求、系统可靠性、能
效优化以及系统保护等因素。
通过合理设计和选择优质的液压元件,可以满足掘进机行走机构的液压系统需求。
小型挖掘机行走装置设计
小型挖掘机行走装置设计摘要当今随着科技的不断进步与发展,各行各业都面临着技术的革新,同时也面临着来自多方面的挑战。
而随着社会的发展进步,工程机械在各行各业中起到了举足轻重的地位。
然而,在不同的环境下,对挖掘机等工程机械的大小、性能的要求有所不同,各种性能参数决定其工作环境。
工程机械在国民生产中有着很重要的位置,它在很大程度上取代了原始的、落后的生产工具,它在现今中国和全世界的飞速发展的今天功不可没。
而挖掘机的行走装置是整个机械的支撑部分,它承受机械的自重及工作装置挖掘时的反力,使挖掘机稳定的支撑在地面工作,也是挖掘机在工作场地自由移位的装置。
行走装置设计的好坏会影响挖掘机的机动性、爬坡能力、越野性能、接地比压以及挖掘机的稳定性等。
本设计的主要内容为:液压挖掘机行走装置总体方案设计;绘制装配草图和总装配图;行走装置牵引力的计算;行走装置传动方案的选择和传动比的设计计算;一些主要零部件的强度校核;张紧装置、行走架和四轮一带的选型设计;绘制零、部件图和总装配图,编写设计计算说明书。
本设计的主要特点是:本方案设计中提出多种方案,从理论上、实际经验上、可靠性、可实现性、综合性能等进行方案比较,从而选择最佳方案。
技术设计中应考虑总体配置合理、安全;选材、加工方法和技术条件可行;制图正确、标注齐全符合国家标准。
充分注意整机各子系统之间的相关性,力求整机性能的一致性和最优化性。
关键字:液压挖掘机、行走装置、底盘。
as technology continues to progress and development all walks of life are faced with technology innovation. is alsofacing challenges from a wide range目录第1章绪论 (1)1.1研究小型挖掘机行走装置的意义 (1)1.2设计背景 (1)1.3国内外小型挖掘机的研究现状和发展趋势和存在问题 (2)第2章小型挖掘机概述 (3)2.1小型挖掘机的组成 (3)2.2小型挖掘机行走机构的组成 (5)2.3小型挖掘机类型确定 (7)第3章小型挖掘机行走装置传动系统 (9)3.1机械式 (9)3.2液力机械式 (9)3.3全液压式(静液压式和液压机械式) (10)3.4电力式 (11)第4章小型挖掘机行走装置的详细设计 (13)4.1行走机构设计的主要参数 (13)4.2行走装置的总体几何尺寸 (13)4.3履带运行阻力计算 (16)4.3.1 土壤变形的阻力(即外部行驶阻力) (16)4.3.2 履带对地面的水平挤压力 (17)4.3.3 履带的运行比阻力 (17)4.3.4 坡度阻力 (18)4.3.5 内部阻力 (19)4.3.6 转弯阻力 (22)4.3.7 风载阻力 (24)4.3.8 惯性阻力 (24)4.3.9 牵引力的校核 (26)4.4平均接地比压的计算 (26)4.5行走装置轮边减速器的设计 (26)4.5.1 行星齿轮的传动特点 (26)4.5.2 行星减速器传动方案的选定 (28)4.5.3 减速器传动比的分配原则 (29)4.5.4 行星减速器齿轮的配齿 (29)4.6行走装置张紧结构的设计 (30)4.6.1 液压挖掘机张紧装置的结构及工作原理 (30)4.6.2 履带式底盘对张紧装置的设计要求 (31)4.6.3 张紧弹簧的设计 (31)4.6.4 弹簧强度的校核 (37)4.6.5 张紧油缸主要尺寸的设计 (38)4.7行走装置功率及挖掘力的设计 (39)4.7.1 发动机功率 (39)4.7.2 液压功率 (39)4.7.3 挖掘力参数Pf的计算 (39)4.7.4 最大转弯力矩的计算 (40)4.8四轮一带的设计 (40)4.8.1履带的选型设计 (40)4.8.2驱动轮的选型设计 (41)4.8.2.1主要参数的确定 (41)4.8.2.2强度校核 (42)4.8.3导向轮的设计 (42)4.8.4支重轮的设计 (43)4.8.5托轮的计算 (43)4.9行走架设计 (44)第5章设计总结和未来展望 (45)5.1总结收获 (45)5.2未来展望 (46)参考文献 (47)第1章绪论1.1 研究小型挖掘机行走装置的意义挖掘机在工业与民用建筑、道路建设、农田水力、油田矿山、市政工程、机场、港口等部门土石方施工中,占有重要位置。
WY70履带式液压挖掘机工作装置机构设计
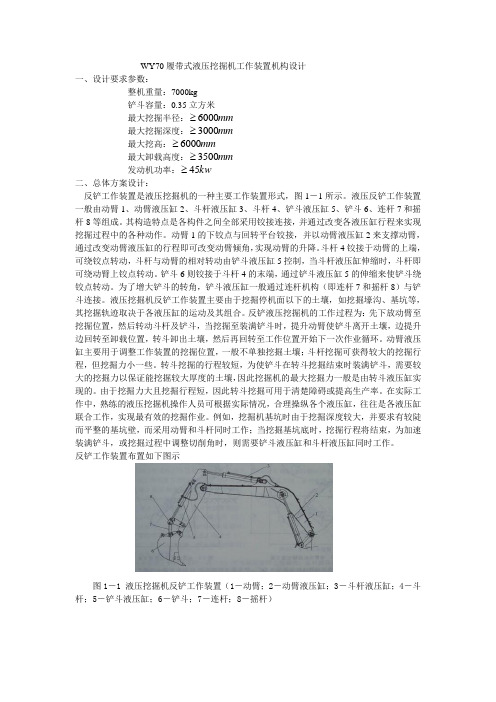
WY70履带式液压挖掘机工作装置机构设计一、设计要求参数:整机重量:7000kg铲斗容量:0.35立方米最大挖掘半径:mm 6000≥最大挖掘深度:mm 3000≥最大挖高:mm 6000≥最大卸载高度:mm 3500≥发动机功率:kw 45≥二、总体方案设计:反铲工作装置是液压挖掘机的一种主要工作装置形式,图1-1所示。
液压反铲工作装置 一般由动臂1、动臂液压缸2、斗杆液压缸3、斗杆4、铲斗液压缸5、铲斗6、连杆7和摇杆8等组成。
其构造特点是各构件之间全部采用铰接连接,并通过改变各液压缸行程来实现挖掘过程中的各种动作。
动臂1的下铰点与回转平台铰接,并以动臂液压缸2来支撑动臂,通过改变动臂液压缸的行程即可改变动臂倾角,实现动臂的升降。
斗杆4铰接于动臂的上端,可绕铰点转动,斗杆与动臂的相对转动由铲斗液压缸5控制,当斗杆液压缸伸缩时,斗杆即可绕动臂上铰点转动。
铲斗6则铰接于斗杆4的末端,通过铲斗液压缸5的伸缩来使铲斗绕铰点转动。
为了增大铲斗的转角,铲斗液压缸一般通过连杆机构(即连杆7和摇杆8)与铲斗连接。
液压挖掘机反铲工作装置主要由于挖掘停机面以下的土壤,如挖掘壕沟、基坑等,其挖掘轨迹取决于各液压缸的运动及其组合。
反铲液压挖掘机的工作过程为:先下放动臂至挖掘位置,然后转动斗杆及铲斗,当挖掘至装满铲斗时,提升动臂使铲斗离开土壤,边提升边回转至卸载位置,转斗卸出土壤,然后再回转至工作位置开始下一次作业循环。
动臂液压缸主要用于调整工作装置的挖掘位置,一般不单独挖掘土壤;斗杆挖掘可获得较大的挖掘行程,但挖掘力小一些。
转斗挖掘的行程较短,为使铲斗在转斗挖掘结束时装满铲斗,需要较大的挖掘力以保证能挖掘较大厚度的土壤,因此挖掘机的最大挖掘力一般是由转斗液压缸实现的。
由于挖掘力大且挖掘行程短,因此转斗挖掘可用于清楚障碍或提高生产率。
在实际工作中,熟练的液压挖掘机操作人员可根据实际情况,合理操纵各个液压缸,往往是各液压缸联合工作,实现最有效的挖掘作业。
挖掘机行走机构和回转以及液压系统
行走装置:按结构特点液压挖掘机行走装置可分为履带式和轮胎式两大类。
履带式行走装置牵引力大,接地比压小,因而越野性能好,爬坡能力大,且转弯半径小,机动灵活,获得广泛应用。
所以本设计选择履带式行走装置。
履带式行走装置由四轮一带即驱动轮,导向轮,支重轮,拖轮,以及履带,装进装置和缓冲弹簧,横走机构,行走架等组成。
机械运行时,驱动轮在履带紧边产生一个拉力,力图把履带从支重轮下拉出,由于支重轮下的履带与地面间有足够的附着力,阻止履带的拉出,迫使驱动轮卷绕履带向前滚动,导向轮再把履带铺设到地面,从而使得机体借助支重轮沿着履带轨道向前运行。
四轮一带等有关参数的初步确定和行走机构的布置1.履带支撑长度L,轨距B和履带板宽度b应合理匹配,使得接地比压,附着性能和转弯性能均符合要求。
根据同机型挖机的对比以及经验公式,初选L=2130mm。
B=1700mm。
b=450mm。
2.履带节距和驱动轮齿数应在满足强度,刚度的要求下,尽量取较小的值以降低履带高度。
=154.25。
履带节距t3.履带板总数n=38 / 侧。
回转装置回转装置由转台,回转支撑和回转机构组成。
滚动轴承式回转支撑由内外座圈,滚动体,隔离体,密封装置,润滑装置和链接螺栓等组成。
本设计采用单排滚球式回转支撑滚动体。
液压挖掘机回转机构的回转时间约占整个工作装置循环时间的50%~70%,能量消耗约占25%~40%,回转液压油路的发热量约占液压系统总发热量的30%~40%,因此合理确定回转机构的液压油路形式和结构方案,正确选择回转机构主参数,对提高生产率和功能利用率,改善司机的劳动条件,减少工作装置的冲击等具有十分重要的意义。
对回转机构的基本要求是:1.在回转力矩和角加速度不超过允许值的前提下,应尽可能缩短回转时间;2.回转时工作装置的动载系数不应该超过允许值;3.回转能量损失小。
液压传动系统采用变量泵驱动。
制动方式采用液压制动加机械制动,可加大制动力矩,减少制动的时间,定位转却,制动油温不高。
完整_挖掘机的液压系统设计

摘要挖掘机作为我国工程机械的主力种机,被广泛应用于各种各样的施工作业中。
挖掘机产品核心技术就是液压系统设计,由于挖掘机的工作条件恶劣,其性能的优劣决定挖掘机工作性能的高低,要求实现的动作复杂,于是他对液压系统的设计提出了很高的要求,其液压系统也是工程机械液压系统中最为复杂的。
因此,对挖掘机液压系统的分析设计对推动我国挖掘机的发展具有十分重要意义。
关键词:液压挖掘机液压系统回路目录前言 (4)1 绪论 (5)1.1选题的意义 (5)1.2挖掘机的发展趋势 (5)1.3挖掘机的设计方案 (5)1.3.1挖掘机液压系统技术发展动态的分析研究 (5)1.3.2挖掘机液压系统总体设计 (6)1.3.3挖掘机液压系统设计 (6)2 挖掘机液压系统概述 (7)2.1挖掘机液压系统的基本组成及其要求 (7)2.2挖掘机液压系统的基本动作分析 (8)2.3挖掘机液压系统的基本回路分析 (9)2.3.1限压回路 (9)2.3.2缓冲回路 (10)2.3.3 节流回路 (11)2.3.4 行走限速回路 (12)2.3.5闭锁回路 (13)2.3.6再生回路 (13)3 挖掘机液压系统设计 (14)3.1 挖掘机的功用和对液压系统的要求 (14)3.2挖掘机液压系统分析 (15)3.2.1挖掘机的液压系统原理图如下图 (15)3.2.2系统工作循环分析 (15)3.2.4液压系统中几种低压回路作用 (17)3.3液压元件的选用 (17)3.3.1泵、马达的选用 (17)3.3.2液压阀的选用 (18)4液压缸的设计计算和泵的参数计算 (19)4.1 液压的计算设计 (19)4.1.1外负载计算 (19)4.1.2液压缸结构尺寸计算 (19)4.1.3油缸强度计算 (21)4.2泵的参数计算 (23)4.2.1泵的压力计算 (23)4.2.2计算所需要的泵的流量 (24)5溢流阀的作用和设计计算 (25)5.1溢流阀的作用 (25)5.2溢流阀的设计计算 (25)5.2.1设计要求 (25)5.2.2几何尺寸确定 (26)5.2.3静态特性计算 (28)6 致谢 (33)参考文献 (34)前言挖掘机的液压系统是挖掘机上最重要的组成部分,它是挖掘机工作循环的动力系统。
毕业设计(论文)-小型液压挖掘机挖掘工作装置设计[管理资料]
![毕业设计(论文)-小型液压挖掘机挖掘工作装置设计[管理资料]](https://img.taocdn.com/s3/m/2b2898a177232f60dccca134.png)
小型液压挖掘机挖掘工作装置设计摘要挖掘机广泛的应用于建筑行业,排水灌溉,采矿,清除障碍和露天开矿等各种场合。
它对减轻繁重的体力劳动,保证工程的质量,加快建设的速度,提高劳动的生产率起到了巨大的作用。
随着液压传动的技术在工程机械上广泛应用,单斗液压挖掘机也有了迅速的发展。
液压挖掘机具有质量轻、体积小、结构紧凑、挖掘力大、操纵轻便,以及易实现无级变速和自动控制等一系列的优点。
为了能满足不同的作业要求,其工作装置也有很多类型。
例如:正铲,反铲,牵引绳,塔式等。
在上述的工作装置中,反铲挖掘机应用的最为广泛,因而合理设计工作装置具有十分重要的意义。
本论文主要对由动臂、斗杆、铲斗、连杆机构等组成的小型液压挖掘机工作装置进行设计。
具体内容包括以下的五部分: 挖掘机工作装置的总体设计;挖掘机的工作装置详细的机构运动学分析;工作装置各部分的基本尺寸的计算和验证;工作装置主要部件的结构设计。
通过静强度与动强度分析,得出了工作装置在静载荷下结构是安全的。
并利用同类机械的的参数做相应的调试,得出一套较合理的参数,为后续的工作打好了基础。
关键词:挖掘机;液压;动臂;斗杆;铲斗THE DESIGN OF WORKING DEVICE OF SMALLHYDRAULIC EXCA VATORABSTRACTExcavators are widely used in all branches of constructions, to drain and irrigate land, extract useful minerals, the removal of obstacle and the open-cast excavation of coal and ore. They play a tremendous role in relieving labor force, ensuring project quality, accelerating the speed of construction and improving the labor productivity.With the great development of hydraulic technology, the single buckethydraulic excavator has been improving greatly. The hydraulic excavator is provided a great many advantages,such as light weight, small volume, compact structure, powerful dig force, easy operate, continuous variable velocity, automatic controls and so order to meet the different requirements, the working device also has many types. For example: dipper shovel, pull shovel,dragline, jib crane, tower crane and so the above work device, backhoe excavator is used most widely, so the rational design of work device is of great significance.In this paper, mainly by the boom, bucket rod, bucket, excavator linkage component of small hydraulic excavator working device design. It includes thefollowing several parts:the overall design of excavator work device; excavator working device detailed kinematics analysis; the basic size calculation and verification of each part of Working device ; Through the static strength and dynamic strength analysis, the device under static loading structure is safe. Use the same mechanical parameters of the commissioning, to derive a set of reasonable parameters, for the follow-up work to lay a good foundation.KeyWord: Excavator; Hydraulic; Movable arm,Dipper,Bucket目录1 绪论 (1)课题设计的背景和意义 (1)挖掘机的行业现状 (1)挖掘机技术发展趋势 (2)工程机械的前景展望 (3)2 小型液压挖掘机反铲工作装置结构方案设计 (3)引言 (3)液压挖掘机的工作原理与基本组成分析 (3)反铲工作装置的结构设计方案分析 (5)反铲工作装置的结构形式及结构特点 (5)本章小结 (7)3 小型液压挖掘机反铲工作装置参数设计 (7)工作装置的设计原则与参数说明 (7)反铲工作装置的设计原则 (7)机构自身的几何参数设计 (8)反铲工作装置几何参数的设计计算 (8)铲斗机构主要参数的设计计算过程 (8)动臂结构参数的计算过程 (9) (13)铲斗机构及铲斗液压缸主要参数的设计过程 (15)动臂液压缸的设计计算 (18)液压系统闭锁压力的确定分析 (20)4 反铲工作装置的载荷分析计算 (21)工况分析以及确定不利工况 (21)第一种工况位置下动臂和斗杆受力分析计算 (24)第二种工况位置下动臂和斗杆受力分析计算 (28)第三种工况位置下动臂和斗杆受力分析计算 (32)斗杆内力图分析 (37)动臂内力图分析 (38)5 挖掘机工作装置截面尺寸的设计与校核 (40)工作装置斗杆截面尺寸的设计与校核 (41)斗杆的强度校核 (41)斗杆稳定性校核 (42)铰座挤压强度校核 (42)动臂截面尺寸设计与校核 (43)动臂强度校核 (44)动臂稳定性校核 (46)铰座的挤压强度校核 (46)6 结论 (58)参考文献 (59)致谢 (50)1 绪论课题设计的背景和意义总所周知,我国是一个发展中的国家,在其广阔的土地上正在进行着大规模经济建设,这就需要很多土石方施工机械为建设服务,而我们知道液压挖掘机是一类最重要的土石方的施工机械。
小型液压挖掘机履带行走装置的参数化设计方法研究

2、降低了装配成本:通过减少装配环节和优化装配流程,降低了人工成本和 时间成本。装配成本降低了20%。
3、提高了产品质量:优化后的工作装置结构更加合理,性能更加稳定,提高 了产品的整体质量。
五、结论
本次演示面向装配环境,探讨了液压挖掘机工作装置的参数化设计方法。通过 建立三维模型、设定设计参数、制定优化策略和仿真分析,实现了工作装置性 能的优化和装配成本的降低。通过具体实例分析,证明了参数化设计在液压挖 掘机工作装置设计中的有效性和优越性。随着技术的不断发展和应用需求的不 断增长,参数化设计将在液压挖掘机工作装置设计中发挥更大的作用。
文献综述
履带式行走装置的发展历程可以追溯到20世纪初,经过上百年的发展,其在军 事、民用和工程等领域得到了广泛应用。然而,目前履带行走装置的设计仍存 在以下问题:
1、能耗较高:履带行走装置的能耗占整个挖掘机能耗的30%左右,因此降低其 能耗对提高挖掘机经济性具有重要意义。
2、行走速度较慢:履带式行走装置的行走速度通常较慢,限制了挖掘机的作 业效率。
(4)仿真分析:利用仿真软件对工作装置进行模拟分析,以验证参数化设计 的正确性和合理性。
四、实例分析
以某型号液压挖掘机工作装置为例,采用参数化设计方法进行优化。具体优化 目标为提高挖掘效率、降低装配成本。通过调整油缸行程和斗杆角度,以及优 化各部件的装配顺序,实现了以下效果:
1、提高了挖掘效率:经过仿真分析和实际应用验证,优化后的工作装置挖掘 效率提高了15%。
2、压力特性分析:压力特性分析主要系统在不同工况下的压力变化情况。压 力波动不仅会影响挖掘机的行走稳定性,还会对液压元件的寿命产生影响。因 此,对压力特性的研究是优化行走液压系统的重要环节。
3、跟随特性分析:跟随特性的是控制系统对行走指令的响应速度。良好的跟 随性能能够保证挖掘机在复杂工况下迅速、准确地响应操作指令,从而提高作 业效率。
单斗液压挖掘机工作装置设计

第一章绪论1. 1 液压挖掘机的组成、分类、作用和特点挖掘机由转台及转台上部机构、底架及行走系、与工作装置等三大部分构成。
转台上布置了发动机、主轴泵及驾驶室等,经由回转滚盘装在底架之上。
工作装置的动臂铰支于转台上。
转台可绕底架的垂直面内绕其铰点作一定的转动。
它的工作过程是以铲斗的切削刃切削土壤,铲斗装满后提升、回转至卸土位置,卸空后的铲斗再回到挖掘位置并开始下一次的作业。
因此,液压挖掘机是一种周期作业的土方机械。
【7】液压挖掘机的分类有很多种:根据行走装置传动型式分:全液压式,半液压式;根据不同的行走系分:履带式、轮胎式、汽车式和悬挂式;根据主要用途和工作装置的不同分:通用型和专用型;根据工作装置的结构不同分:铰接式和伸缩臂式等。
挖掘机械在建筑机械发展中占有很大比重和重要的地位,是重点发展的机械品种之一、尤其是中小型、通用的单斗挖掘机不仅用于土石方的挖掘工作,而且通过工作装置的更换,还可以用作起重、装载、抓取、打桩、钻孔等多种作业,它在各种工程施工中用途更大,已成为机械化施工中广泛使用的不可缺少的机械设备。
由于液压挖掘机具有质量小,挖掘力大,工作平稳,效率高,操纵灵活,机动性好等优点,单斗液压挖掘机由于在动力装置和工作装置之间采用容积式液压传动,靠液体的压力能进行工作,因此,与机械传动相比有许多优点:能无级调速且调速范围大(最高与最低速度之比可达1000:1);能得到较低的稳定转速(采用柱塞式油马达,稳定转速可低到1转/分);快速作用时,液压元件产生的惯性较小,并可作高速反转(电动机回转部分的起动力矩比其工作力矩大50%,而油马达则不大于5%)。
加速中等功率电动机需1秒钟到数秒钟,而加速油马达只需0.1秒;传动平稳,结构简单,可吸收冲击和振动;操纵省力,易实现自动化控制;易实现标准化、通用化、系列化。
单斗液m液压挖掘机斗齿切削力为12~压挖掘机与同级机械传动挖掘机相比,挖掘力高30%左右(如:1.0315吨,而同级机械传动挖掘机只有10吨左右)。
机械原理课程设计-正铲液压挖掘机工作装置结构设计

机械原理设计任务书设计题目:正铲液压挖掘机工作装置设计一、设计题目简介正铲挖掘机的铲土动作形式。
其特点是“前进向上,强制切土”。
正铲挖掘力大,能开挖停机面以上的土,宜用于开挖高度大于2m的干燥基坑,正铲的挖斗比同当量的反铲的挖掘机的斗要大一些,其工作装置直接决定其工作范围和工作能力。
二、设计数据与要求题号铲斗容量挖掘深度挖掘高度挖掘半径卸载高度C三、设计任务1、绘制挖掘机工作机构的运动简图,确定机构的自由度,对其驱动油缸在几种工况下的运动绘制运动线图;2、根据所提供的工作参数,对挖掘机工作机构进行尺度综合,确定工作机构各个杆件的长度;3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
4、编写设计计算说明书,其中应包括设计思路、计算及运动模型建立过程以及效果分析等。
5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
完成日期:年月日指导教师目录摘要------------------------------------------------------------------------------------------------------------ - 1 -一、机构简介--------------------------------------------------------------------------------------------------- - 1 -二、正铲工作装置斗齿尖的特殊位置-------------------------------------------------------------------- - 2 ---------------------------------------------------------------------------------------------------------------- - 2 - --------------------------------------------------------------------------------------------------------------- - 2 - --------------------------------------------------------------------------------------------------------------- - 3 - --------------------------------------------------------------------------------------------------------------- - 3 - 三、正铲挖掘机工作装置设计 ----------------------------------------------------------------------------- - 3 ---------------------------------------------------------------------------------------------------------------- - 4 - --------------------------------------------------------------------------------------------------------------- - 4 - --------------------------------------------------------------------------------------------------------- - 4 ---------------------------------------------------------------------------------------------------------- - 5 ---------------------------------------------------------------------------------------------------------- - 6 - --------------------------------------------------------------------------------------------------------------- - 6 - --------------------------------------------------------------------------------------------------------- - 7 ---------------------------------------------------------------------------------------------------------- - 8 ---------------------------------------------------------------------------------------------------------- - 9 - 3.4传动角检验--------------------------------------------------------------------------------------- - 10 - 四、机构运动分析------------------------------------------------------------------------------------------- - 10 -------------------------------------------------------------------------------------------------------------- - 10 - ------------------------------------------------------------------------------------------------------------- - 11 - ------------------------------------------------------------------------------------------------------- - 11 -------------------------------------------------------------------------------------------------------- - 12 -------------------------------------------------------------------------------------------------------- - 14 -五、实验台搭建模型-------------------------------------------------------------------------------------- - 16 -六、参考文献------------------------------------------------------------------------------------------------- - 16 -七、附录 ------------------------------------------------------------------------------------------------------- - 17 -附录一机体尺寸和工作尺寸经验系数表 ----------------------------------------------------- - 17 - 附录二机构计算MATLAB程序---------------------------------------------------------------- - 17 -摘要本文根据任务书要求的挖掘机的作业范围并参照样机设计了正铲液压挖掘机的工作装置,确定了挖掘机的动臂长,斗杆长和铲斗的尺寸。
机械毕业设计1408挖掘机行走装置的设计

1.2国内外挖掘机行走装置的研究现状
1.2.1行走装置的国外研究现状
The design ofHydraulicExcavatorWalkingDevice
as technology continues to progress and developmentall walks of life are faced with technology innovation,is also facing challenges from a wide range
据统计,2011年11月份,主要合资生产企业斗山、小松、日立分别实现销售1513、2000 和1451 台,同比增长6.9%、38.4%和34%;市场份额10.5%、13.9%和10.1%,同比下降5.7、2.6和2.3个百分点。
11月份,民族挖掘机品牌三一、山河智能、柳工和厦工销量2105、391、475和205台,同比分别增长297.2%、98.5%、70.9%和105%;市场份额14.7%、2.7%、3.3%和1.4%,同比分别上升8.6、0.5、0.1和0.3个百分点;其中三一单月份额首次跃居行业第一,这也是三一历史上单月份额最高的一个月。前11个月累计,斗山、小松、日立份额分别下降2.24、0.95和1.37个百分点;三一、厦工和柳工分别提升1.81、0.46和0.12个百分点【3】。
近些年来,随着微电子技术,计算机技术,制约技术通信技术等新技术的日益渗透到液压挖掘机技术中,智能化的进一步运用,使得动力系统内部一些制约元件能够随着挖掘机具体工作情况而改变,从而提高工作效率,使操纵变得更容易。世界各工业发达国家的液压挖掘机技术得以迅速提高,像国外的这些厂家如日本的小松、日立、神钢、住友等,美国的卡特,韩国的大宇、现代,尤其是德国的挖掘机,技术都已经很先进了。而今,挖掘机技术更是朝着智能、环保的方向进展,像Carnegie Mellon 大学的自主装载系统、澳大利亚机器人中心、英国兰卡斯特大学的智能挖掘机等都在开始新兴技术的融合进展,上世纪80 年代初, 美国KraftTeleRobtics 公司和John Deere 公司等都相继成功开发出遥控挖掘机,日本小松制作所以PC200- 2 型液压挖掘机为基本机型进行遥控挖掘机研制【1】。
挖掘机行走装置设计

液压挖掘机行走装置设计第一章设计原则及方案的选择1.1 行走装置设计原则单斗液压挖掘机的行走装置是整机的支撑部分,其作用是用来承受机械的自重及工作装置挖掘时的反力,使挖掘机稳定的支撑在地面上工作。
同时又使挖掘机能在工作时作场内运动及转移工地时作运输性(轮式行走装置)运行。
因而,设计单斗液压挖掘机的行走装置时应尽量满足以下要求:1、单斗液压挖掘机应有较大的牵引力,使挖掘机在湿软的地面或高低不平的地面上行走时具有良好的越野性能,并有较强的爬坡能力和转弯能力:2、在不增高行走装置的总高度的前提下应使行走装置具有较大的离地间隙,使挖掘机在不平地面上行走具有良好的通过性能:3、要降低挖掘机的接地比压或使其具有较大的支撑面积,以提高挖掘机的稳定性:4、挖掘机在斜坡下行时不发生超速溜坡现象,挖掘时不发生下滑,提高工作时的安全可靠性:5、挖掘机的行走装置外形尺寸应符合道路运输的要求。
轮胎式行走装置与履带式相比,最大的优点是机动性好,运行速度快(通常达到20KM/h)。
如将传动箱脱档后由牵引车拖运作长距离运输时,速度可达60KM/h。
轮胎式行走装置的缺点是接地比压较大(150~500KPa)爬坡能力较小(通常不超过65%)。
挖掘时需用专门的支腿支撑使机身稳定。
目前轮胎式行走装置基本上只用在斗容量1m3以下的挖掘机中。
单斗液压挖掘机的行走装置按照传动方式可分为液压式和机械式两类。
选择行走装置的形式时,应根据工作地点的土壤条件、工作量、运输距离及使用条件等决定。
图1.1 挖掘机样机图1.2轮胎式挖掘机行走装置的结构形式轮胎式液压挖掘机形式很多,有装在标准汽车地盘上的液压挖掘机,也有装在轮胎式拖拉机地盘上的悬挂式液压挖掘机。
这些挖掘机的斗容量斗较小,工作装置回转角度受一定的限制。
若斗容量稍大、工作性能要求较高的轮胎式挖掘机斗具有专业的轮胎地盘行走装置。
专用轮胎地盘的行走装置式根据挖掘机的工况、行驶要求等因素合理设计的行走装置,挖掘机的作业及行驶操作均在驾驶室内进行,因此,操作方便,灵活可靠。
液压挖掘机(底盘)行走系统设计
目录摘要.................................... 错误!未定义书签。
Abstract ................................ 错误!未定义书签。
第1章绪论............................. 错误!未定义书签。
1.1 挖掘机的简介..................... 错误!未定义书签。
1.2 挖掘机的工作特点................. 错误!未定义书签。
1.3 国内挖掘机的现状和发展前景....... 错误!未定义书签。
1.4 本课题的主要任务及意义........... 错误!未定义书签。
第2章总体设计方案..................... 错误!未定义书签。
2.1 履带式行走装置的结构形式......... 错误!未定义书签。
2.1.1 履带式行走装置的特点........ 错误!未定义书签。
2.1.2 履带式行走装置的组成........ 错误!未定义书签。
2.2 总体设计原则..................... 错误!未定义书签。
2.3 总体设计重点及难点............... 错误!未定义书签。
2.4 设计方式及步骤................... 错误!未定义书签。
第3章“四轮一带”及其附件的设计........ 错误!未定义书签。
3.1 履带的设计和选型................. 错误!未定义书签。
3.1.1 履带的特点.................. 错误!未定义书签。
3.1.2 履带的构成.................. 错误!未定义书签。
3.1.3 履带的选型.................. 错误!未定义书签。
3.2 支重轮........................... 错误!未定义书签。
3.2.1 支重轮特点.................. 错误!未定义书签。
挖掘机回转与行走装置的设计

吉林大学学士学位论文(设计)承诺书本人郑重承诺:所呈交的学士学位毕业论文(设计),是本人在指导教师的指导下,独立进行实验、设计、调研等工作基础上取得的成果。
除文中已经注明引用的内容外,本论文(设计)不包含任何其他个人或集体已经发表或撰写的作品成果。
对本人实验或设计中做出重要贡献的个人或集体,均已在文中以明确的方式注明。
本人完全意识到本承诺书的法律结果由本人承担。
学士学位论文(设计)作者签名:年月日摘要一般来说,小型挖掘机是指1~6吨级的挖掘装载机,由于其身姿小巧和具有方便的转场特性,所以在城市地区建设土方工程应用中,小型液压挖掘机扮演着重要角色。
20世纪八九十年代以来小型挖掘机得以迅速发展,在城市建设、交通,建筑等诸多施工中无一不发挥了重要作用。
小型挖掘机利用其特有的设计,经常工作在城市等狭窄的空间内,节省了劳动力、提高了工作效率,对于各种作业要求都能够游刃有余,可以说是城市施工中最具有代表性的施工机械。
现在城市建设飞速发展,大量的城市改造工程不仅要求施工时间短、而且对施工的安全性,环保性和不妨碍居民生活上都提出了要求,这些条件都促进了小型挖掘机的发展。
小型挖掘机一般由动力装置、传动装置、回转装置、行走装置和工作装置等组成。
其中回转装置和行走装置则直接影响着挖掘机的使用性和经济性,在挖掘机研究中占有重要地位。
本设计参照了现有的一些小型液压挖掘机产品,着重对挖掘机的回转装置和行走装置进行分析设计,主要完成对行走装置和回转装置装置的总体设计,进一步掌握挖掘机的设计方法和步骤,巩固和加深对所学基础理论和专业知识的掌握,了解国内外挖掘机的发展状况。
关键字:小型液压挖掘机回转装置行走机构AbstractGenerally speaking, small excavators refers to the 1 ~ 6 t excavating loader, thanks to its small body and convenient also features, making small excavators become urban areas the earthwork the ideal equipment of application. Since the s, small engineering machinery is in municipal engineering, transportation construction plays the bigger superiority and develop rapidly. Small excavators in these engineering to save human, material made great contributions, meet the operation requirement of city, in the city of narrow space in the work can maximize their production ability, and gradually become urban construction the representative construction machinery. The development of small excavators depends on the development of city construction, because the city's transformation, the construction is more, requirements of short time, construction construction machinery minor impact on the environment, safety and low pollution, turning radius, easy to transport and a small city scenery in coordination with appearance, and so on.Small excavators general by power device, transmission, and turn to device, walk device and working equipment etc. One device and walk back the device directly influence the excavator used and the economy, in the excavator occupies an important place in the study. With reference to the design of existing some small hydraulic excavator products, and focuses on the device and walk back excavator device in the analysis and design, the main finish to walk and rotation of the equipment can deviceoverall design, to grasp the design method and steps of the excavator, strengthen and deepen our understanding of the basic theory and specialty knowledge learned of the master, understand the development situation of domestic and foreign excavator.Keywords: small excavators walk and rotation of the equipment目录第1章绪论 (8)1.1小型液压挖掘机的工作特点和基本类型 (8)1.1.1小型液压挖掘机的工作特点 (8)1.1.2小型液压挖掘机的基本类型 (10)1.2国内外研究现状和未来发展趋势 (11)1.2.1国内外研究现状 (11)1.2.2未来的发展趋势 (12)1.3 主要设计内容 (12)第2章整体设计 (14)2.1 小型液压挖掘机的组成 (14)2.2 行走机构的选择 (15)2.2.1履带式行走的特点 (15)2.2.2轮胎式行走的特点 (15)2.3 回转装置的选择 (16)第3章主要参数的计算 (17)3.1总体几何尺寸 (17)3.2 行走装置的计算 (18)3.2.1履带运行阻力计算 (18)3.2.2平均接地比压的计算计算 (21)第4章行走装置的设计 (22)4.1四轮一带的设计 (22)4.1.1履带的选型设计 (22)4.1.2驱动轮的选型设计 (26)4.1.3导向轮的设计 (28)4.1.4支重轮的设计 (30)4.1.5托轮的计算 (34)4.2张紧装置的选型设计 (36)4.2.1张紧弹簧的设计 (37)4.2.2油缸的设计 (40)4.3行走架的设计 (40)第5章回转装置 (42)5.1回转机构的设计 (43)5.1.1回转机构的参数选择 (43)5.1.2最佳转速的计算 (44)5.2回转支承的选型设计 (45)5.2.1支承型式的选择 (46)5.2.2滚动轴承的参数 (46)5.2.3回转机构的容量 (47)5.3回转小齿轮的设计 (48)第6章设计总结 (50)参考文献 (51)致谢 (52)附录:图纸名号目录 (53)第1章绪论1.1小型液压挖掘机的工作特点和基本类型1.1.1小型液压挖掘机的工作特点小型液压挖掘机无论是在体积还是作业效率方面都具有相当大的优势。
矿大毕业设计-液压挖掘机行走装置设计

摘要随着人类社会的不断进步,科学技术的高速发展,工程机械在各行各业中得到了很好的运用。
然而,在不同的环境下,对挖掘机等工程机械的大小、性能的要求有所不同,各种性能参数决定其工作环境。
工程机械在国民生产中有着很重要的位置,它在很大程度上取代了原始的、落后的生产工具,它在现今中国和全世界的飞速发展的今天功不可没。
然而,在不同的环境下,对挖掘机等工程机械的大小、性能的要求有所不同,各种性能参数决定其工作环境。
而挖掘机的行走装置是整个机械的支撑部分,它承受机械的自重及工作装置挖掘时的反力,使挖掘机稳定的支撑在地面工作,也是挖掘机在工作场地自由移位的装置。
行走装置设计的好坏会影响挖掘机的机动性、爬坡能力、越野性能、接地比压以及挖掘机的稳定性等。
关键词:履带式;液压挖掘机;行走机构;张紧装置目录摘要 (1)目录 (1)前言 (1)1 绪论 (2)1.1液压挖掘机在现代化建设中的作用 (2)1.2液压挖掘机的基本类型 (2)1.3本设计的目的和意义 (3)2 总体方案设计 (4)2.1行走装置设计原则 (4)2.2轮胎式挖掘机行走装置的结构形式 (4)2.3履带式液压挖掘机的组成 (5)2.4设计依据 (5)2.5总体设计原则 (6)2.6传动方式的比较与选择 (6)2.7行走方式的比较与选择 (7)3 主要参数确定 (9)3.1总体几何尺寸的设计 (9)3.2驱动轮主要参数的确定及强度校核 (11)3.3功率计及挖掘力参数计算与确定 (12)3.4行走装置的牵引力计算 (13)3.5液压马达主要参数计算确定 (15)4 缓冲张紧装置设计要求与计算 (17)4.1缓冲张紧装置设计要求 (17)4.2张紧弹簧的设计 (17)4.3行星齿轮传动的设计计算说明 (18)4.4轴的设计计算 (24)4.5轴承的选择 (27)4.6键的选用 (29)5 四轮一带及其他部件选型 (32)5.1四轮一带选型 (32)5.2悬架选型与制动器选型 (35)6 设计工作总结 (36)致谢 (37)参考文献 (38)前言改革开放以来,我国的科学技术、信息技术迅猛发展,各行各业都发生了翻天覆地的变化,工程机械行业同样得到了相应的快速发展。
液压挖掘机行走装置设计的零部件的设计
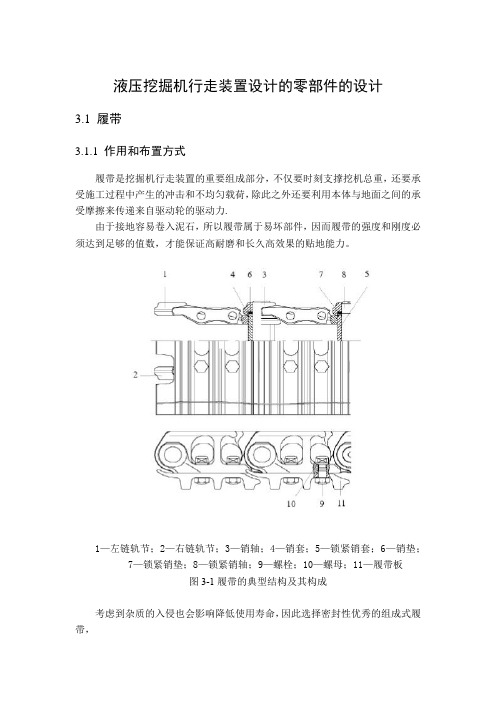
液压挖掘机行走装置设计的零部件的设计3.1履带3.1.1作用和布置方式履带是挖掘机行走装置的重要组成部分,不仅要时刻支撑挖机总重,还要承受施工过程中产生的冲击和不均匀载荷,除此之外还要利用本体与地面之间的承受摩擦来传递来自驱动轮的驱动力.由于接地容易卷入泥石,所以履带属于易坏部件,因而履带的强度和刚度必须达到足够的值数,才能保证高耐磨和长久高效果的贴地能力。
1—左链轨节;2—右链轨节;3—销轴;4—销套;5—锁紧销套;6—销垫;7—锁紧销垫;8—锁紧销轴;9—螺栓;10—螺母;11—履带板图3-1履带的典型结构及其构成考虑到杂质的入侵也会影响降低使用寿命,因此选择密封性优秀的组成式履带,三筋式履带板由于筋多,所以履带板的强度刚度都比较高,载重能力大,它的带板上有四个联节孔,中间有清洁孔,当链轨绕过驱动轮时,可利用轮齿清除链轨节上的淤泥。
所以本课题选择三筋式履带板。
3.1.2 确定履带的宽度b ,履带支撑面长度L 0通过查阅资料得知,履带宽度公式:(3-1)式中M ——是挖掘机总重,本课题挖掘机重量是6.3T ;B ——是履带板宽度;履带的宽度的确定是非常重要的,履带的宽度决定着接地比压,按公式(3.1)算出履带的宽度范围。
根据国家标准取履带的宽度为400mm 根据查阅资料得知,履带支撑面长度公式:(3-2)式中G ——是总重,本课题挖掘机总重是6.3T ; [q ]——是挖掘机的平均接地比压,取[q ]=40Kpa得出。
将已知的数据代入履带支撑面长度满足公式:μϕ)(20f B L -≤ (3-3)式中B ——是履带轨距;——是附着系数,取1;f ——是摩擦系数,取0.1;32091.1)~(0.9M b ⨯=][20q b GL =L 0=2000m μ经过计算,符合公式要求,因此履带的支撑面长度符合设计原则3.1.3 确定履带节距t 0履带节距公式:(3-4)根据这一条公式,代入已知的挖掘机机重,得履带节距范围本课题确定为。
液压挖掘机行走装置介绍

液压挖掘机行走装置介绍液压挖掘机行走装置介绍液压挖掘机是一种多功能机械,被广泛应用于水利工程,交通运输,电力工程和矿山采掘等机械施工中,它在减轻繁重的体力劳动,保证工程质量,加快建设速度以及提高劳动生产率方面起着十分重要的作用。
由于液压挖掘机具有多品种,多功能,高质量及高效率等特点,因此受到了广大施工作业单位的青睐。
文章详细介绍了液压挖掘机行走装置,行走装置兼有液压挖掘机的支撑和运行两大功能、液压挖掘机的行走装置,按结构可分为履带式和轮胎式两大类、履带式行走装置组成与工作原理等方面的知识。
因为行走装置兼有液压挖掘机的支撑和运行两大功能,因此液压挖掘机行走装置应尽量满足以下要求:(1)应有较大的驱动力,使挖掘机在湿软或高低不平等不良地面上行走时具有良好的通过性能、爬坡性能和转向性能。
(2)在不增大行走装置高度的前提下使挖掘机具有较大的离地间隙,以提高其不平地面上的越野性能。
(3)行走装置具有较大的支撑面积或较小的.接地比压,以提高挖掘机的稳定性。
(4)挖掘机在斜坡下行时不发生下滑和超速溜坡现象,以提高挖掘机的安全性。
(5)行走装置的外形尺寸应符合道路运输的要求。
液压挖掘机的行走装置,按结构可分为履带式和轮胎式两大类:履带工行走装置的特点是,驱动力大(通常每条履带的驱动力可达机重的35%-45%),接比压小(40-150kPa),因而越野性能及稳定性好,爬坡能力大(一般为50%-80%,最大的可达100%),且转弯半径小,灵活性好。
履带式行走装置在液压挖掘上使用较为普遍。
但履带式行走装置制造成本高,运行速度低,运行和转向时功率消耗大,零件磨损快,因此,挖掘机长距离运行时需借助于其他运输车辆。
轮胎式行走装置与履带式的相比,优点是运行速度快、机动性好,运行时轮胎不损坏路面,因而在城市建设中很受欢迎,缺点是接地比压大,爬坡能力小,挖掘作业时需要用专门支腿支撑,以确保挖掘机的稳定性和安全性。
履带式行走装置组成与工作原理履带式行走装置由“四轮一带”(即驱动轮、导向轮、支重轮、托轮、以及履带),张紧装置和缓冲弹簧,行走机构,行走架等组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
液压挖掘机行走装置设计1 绪论改革开放以来,我国的科学技术、信息技术迅猛发展,各行各业都发生了翻天覆地的变化,工程机械行业同样得到了相应的快速发展。
各行各业都在奋力拼搏、大胆创新,使得工程机械品种不断增加、产量不断提高、性能不断完善,发展势头强劲。
液压挖掘机是工程机械的一个重要品种,是一种广泛用于建筑、铁路、公路、水利、采矿等建设工程的土方机械。
它的发展与应用反映了一个国家施工机械化的水平。
液压挖掘机由发动机、液压系统、回转机构、工作装置、底盘五部分组成。
发动机的作用是提供动力;液压系统功能是把发动机机械能以油液为介质,利用油泵转变为液压能传送给油缸、马达等,再传动各个执行机构,实现各种运动;回转机构是实现转台的回转;工作装置的作用是进行作业;底盘的作用是承重、传力并保证满足对车速、牵引力和行驶方向的要求。
底盘是组成整体的主要部分,行走机构的性能优劣直接影响整机的使用性能、经济性能,因此着力研究液压挖掘机的行走装置具有十分重要的意义。
根据设计依据及要求,完成挖掘机行走机构总体及减速器设计,进一步掌握挖掘机的设计方法和步骤;巩固、加深对所学的基础理论、基本技能和专业知识的掌握;了解国内外液压挖掘机发展状况。
液压挖掘机是在机械传动挖掘机的基础上发展起来的。
它的工作过程是以铲斗的切割刃切削土壤,铲斗装满后提升、回转至卸土位置,卸空后的铲斗再回到挖掘位置并开始下一次的作业。
因此,液压挖掘机是一种周期作业的土方机械。
液压挖掘机与机械传动挖掘机一样,在工业与民用建筑、交通运输、水利施工、露天采矿及现代化军事工程中都有着广泛的应用,是各种土石方施工中不可缺少的一种重要机械设备。
所以,液压挖掘机作为工程机械的一个重要品种,对于减轻工人繁重的体力劳动,提高施工机械化水平,加快施工进度,促进各项建设事业的发展,都起着很大的作用。
据建筑施工部门统计,一台容量为1.0 m3的液压挖掘机挖掘Ⅰ~Ⅳ级土壤时。
每班生产率大约相当于300~400 和工人一天的工作量。
因此,大力发展液压挖掘机,对于提高劳动生产率和加速国民经济的发展具有重要意义。
1.1 选题意义液压挖掘机是在机械传动挖掘机的基础上发展起来的。
它的工作过程是以铲斗的切削刃切削土壤,铲斗装满后提升、回转至卸土位置,卸空后的铲斗再回到挖掘位置并开始下一次的作业。
因此,液压挖掘机是一种周期作业的土方机械。
液压挖掘机与机械传动挖掘机一样,在工业与民用建筑、交通运输、水利施工、露天采矿及现代化军事工程中都有着广泛的应用,是各种土石方施工中不可缺少的一种重要机械设备。
在建筑工程中,可用来挖掘苦坑、排水沟,拆除旧有建筑物,平整场地等。
更换工作装置后,可进行装卸、安装、打桩和拔除树根等作业。
在水利施工中,可用来开挖水库、运河、水电站堤坝的基坑、排水或灌溉的沟渠,疏浚和挖深原有河道等。
在铁路、公路建设中,用来挖掘土方、建筑路基、平整地面和开挖路旁排水沟等。
在石油、电力、通信业的基础建设及市政建设中,用来挖掘电缆沟和管道等。
在露天采矿场上,可用来剥离矿石或煤,也可用来进行堆弃、装载和钻孔等作业。
在军事工程中,或用来筑路、挖壕沟和掩体、建造各种军事建筑物。
所以,液压挖掘机作为工程机械的一个重要品种,对于减轻工人繁重的体力劳动,提高施工机械化水平,加快施工进度,促进各项建设事业的发展,都起着很大的作用。
因此,大力发展液压挖掘机,对于提高劳动生产率和加速国民经济的发展具有重要意义。
1.2 国内外研究现状国外研究现状:近些年来,随着微电子技术,计算机技术,控制技术通信技术等新技术的日益渗透液压挖掘机技术中,智能化的进一步应用,使得动力系统内部一些控制元件能够随着挖掘机具体工作状况而改变,从而提高工作效率,使操纵变得更容易。
世界各工业发达国家的液压挖掘机技术得以迅速提高,像国外的这些厂家如日本的小松、日立、神钢、住友等,美国的卡特,韩国的大宇、现代,尤其是德国的挖掘机,技术都已经很先进了。
而今,挖掘机技术更是朝着智能、环保的方向发展,像Carnegie Mellon 大学的自主装载系统、澳大利亚机器人中心、英国兰卡斯特大学的智能挖掘机等都在开始新兴技术的融合发展,上世纪80 年代初, 美国Kraft TeleRobtics 公司和John Deere 公司等都相继成功开发出遥控挖掘机,日本小松制作所以PC200- 2 型液压挖掘机为基本机型进行遥控挖掘机研制。
国内研究现状:国产挖掘机的功能比较单一,其衍生产品较少,而且国产挖掘机规格主要集中在30t以下,6t以下的规格比较齐全,从1.5t-30t基本形成系列,200t以上基本空白,因此我国挖掘机还处于“发展期”。
我国挖掘机企业在研发体系和试验体系建设方面雏形难见,产品的开发基本上处于仿造阶段,电控技术只有山东众友等少数公司自己开发,大多数企业都在选购。
节能减排,降噪安全部件精细作业的工作装置、不同功能的附属装置等方面的研发个别企业才刚刚起步,大多数企业没有能力涉及。
目前我国挖掘机的质量问题主要表现在:结构件、电控、发动机、液压件等核心部件,以及诸如轴销、司机室、四轮一带等其他部件。
国内挖掘机厂家诸如广西玉柴、柳工股份、三一重工、河北宣工、徐工、山河智能、龙工集团等,正在崛起的江西南特、桂林华力、湖南九五重工、南昌华工、大连黑猫、合肥振宇等。
1.3 研究内容及方法研究内容:1;根据要求,初步确定行走装置总体方案的设计。
2;行走装置等有关参数和行走装置结构布置。
3;行走机构传动方案,确定行走液压马达主参数和传动比等。
4;进行变速箱设计、轴及其他相关部件选择,并对相关行走装置强度的计算。
5;验算行走速度、爬坡能力。
对行走稳定性进行验算。
研究方法:主要是根据公式计算法(查表法)以挖掘机的机重为指标,对现代挖掘机总体参数用概率的方法得出各主要参数的经验系数,以公式来确定挖掘机的各种参数,然后根据所得出的参数与给出的参数对比,求得最接近的设计参数。
根据所得的数据进行CAD图纸的绘制,利用Pro/e软件将行走装置的零件进行三维装配,并进行仿真行走运动的模拟,通过三维仿真模拟检验设计参数的合理性。
2 行走装置设计总体基本方案2.1行走装置设计原则单斗液压挖掘机的行走装置是整机的支撑部分,其作用是用来承受机械的自重及工作装置挖掘时的反力,使挖掘机稳定的支撑在地面上工作。
同时又使挖掘机能在工作时作场内运动及转移工地时作运输性(轮式行走装置)运行。
因而,设计单斗液压挖掘机的行走装置时应尽量满足以下要求:1、单斗液压挖掘机应有较大的牵引力,使挖掘机在湿软的地面或高低不平的地面上行走时具有良好的越野性能,并有较强的爬坡能力和转弯能。
2、在不增高行走装置的总高度的前提下应使行走装置具有较大的离地间隙,使挖掘机在不平地面上行走具有良好的通过性能。
3、要降低挖掘机的接地比压或使其具有较大的支撑面积,以提高挖掘机的稳定性。
4、挖掘机在斜坡下行时不发生超速溜坡现象,挖掘时不发生下滑,提高工作时的安全可靠性。
5、挖掘机的行走装置外形尺寸应符合道路运输的要求。
轮胎式行走装置与履带式相比,最大的优点是机动性好,运行速度快(通常达到20KM/h)。
如将传动箱脱档后由牵引车拖运作长距离运输时,速度可达60KM/h。
轮胎式行走装置的缺点是接地比压较大(150~500KPa)爬坡能力较小(通常不超过65%)。
挖掘时需用专门的支腿支撑使机身稳定。
目前轮胎式行走装置基本上只用在斗容量1m3以下的挖掘机中。
单斗液压挖掘机的行走装置按照传动方式可分为液压式和机械式两类。
选择行走装置的形式时,应根据工作地点的土壤条件、工作量、运输距离及使用条件等决定。
2.2轮式液压挖掘机行走装置的结构形式轮胎式液压挖掘机形式很多,有装在标准汽车地盘上的液压挖掘机,也有装在轮胎式拖拉机地盘上的悬挂式液压挖掘机。
这些挖掘机的斗容量斗较小,工作装置回转角度受一定的限制。
若斗容量稍大、工作性能要求较高的轮胎式挖掘机斗具有专业的轮胎地盘行走装置。
专用轮胎地盘的行走装置式根据挖掘机的工况、行驶要求等因素合理设计的行走装置,挖掘机的作业及行驶操作均在驾驶室内进行,因此,操作方便,灵活可靠。
图2.1 轮式挖掘机行走装置1-车架;2-回转支承;3-中央回转接头;4-支腿;5-后桥;6-传动轴;7-液压马达及变速箱:8-前桥轮胎式行走装置的主要特点:a 用于承载能力较强的越野路面:b 轮式挖掘机的行驶速度通常不超过20KM/h。
对地面最大比压为150~500KPa。
爬坡能力为40~60%。
标准斗容小于0.6立方米的挖掘机可采用与履带行走装置完全相同的回转平台及上部机构。
c 为了改善越野性能。
轮胎式行走装置多采用全轮驱动。
液压悬挂平衡摆动轴.作业时有液压支腿支撑。
使驱动桥卸荷,工作稳定。
d 长距离运输时为了提高效率。
传动分配箱应脱挡。
有牵引车牵引。
并应与拖挂牵引车达到同步行车。
而挖掘机可以无司机照管。
轮式液压行走装置如图2.1所示。
行走液压马达直接与变速箱相连接(变速箱安装在底盘上),动力通过变速箱由传动轴输出给前后驱动桥,或再经轮边减速传驱动车轮。
轮式单斗液压挖掘机的行走速度不高,其后桥常采用刚性连接,结构简单。
前桥轴可以悬挂摆动,如图2.2所示。
图2.2 摆动前桥机构示意图1-车架;2-回转支承;3-中央回转接头;4-支腿;5-后桥;6-传动轴;7-液压马达及变速箱:8-前桥车桥与前桥4通过中间的摆动铰销铰接。
铰的两侧设有两个悬挂液压油缸2,它的一端与车架5连接,活塞杆端与前桥4连接。
挖掘机工作时,控制阀1把两个液压缸的工作腔与油箱的通路切断,此时液压油缸将前桥的平衡悬挂锁住,减少了摆动,提高了作业稳定性:行走时控制阀1左移,使两个悬挂液压缸的工作腔相通,并与油箱接通。
前桥便能适应路面的高低坡度,上下摆动使轮胎与地面保持足够的附着力。
2.3液压系统的设计一、根据挖掘机的工作环境和条件。
液压系统应满足下列要求:充分利用发动机功率。
提高传动效率;系统和元件应保证在外负荷变化大和急剧的振动冲击作用下。
具有足够的可靠性; 力求减少系统总发热量。
设置轻便耐振的冷却装置。
使主机持续工作时。
油温不超过85度,或温升不大于45度;系统的密封性能要好.由于工作场地尘土多。
油液容易污染。
要求所用元件对油液污染的敏感性低。
整个系统要设置滤油器和防尘装置;为了减轻司机操作强度。
要考虑采用液压或电液伺服操纵装置。
全液压推土机行驶系统的传动方案图2.3和控制原理图2.4。