双阀滤池
城市给水处理厂方案设计_给水厂课程设计
给水厂课程设计计算说明书学院:能源与环境学院专业:给水排水工程目录第一章设计任务及要求 (3)1.1 设计任务及工作要求 (3)1.2 设计原始资料 (3)第二章总体设计 (5)2.1 资料分析与整理 (4)2.2 设计原则 (6)2.3厂址选择 (6)2.4 水厂工艺流程选择 (6)2.5 水处理工艺的选择 (7)第三章净水构筑物的计算 (13)3.1 设计水量 (13)3.2 设计配水井 (13)3.3 药剂投配设备设计 (13)3.4混合设施的设计 (14)3.5反应/絮凝设施的设计 (15)3.6平流沉淀池 (26)3.7普快滤池的设计 (27)3.8 清水池的计算 (29)3.9加氯间的设计计算 (32)第四章 .水厂的平面布置 (32)第五章各构筑物的附属装置及其工艺构造 (33)第六章.高程布置 (33)参考文献 (34)第一章设计任务及要求1.1 设计任务及工作要求1.1.1 设计题目城市给水处理厂方案设计1.1.2 本次课程设计(论文)应达到的目的1加深对《水质工程学Ⅰ》课程内容的理解与掌握;2.培养学生综合运用和深化所学理论知识,培养学生的工程观念;提高独立分析问题和解决工程实际问题的能力;3.通过本课程设计使学生初步具有阅读中外文献的能力,技术经济比较和方案分析选择能力,理论分析与设计运算能力;应用计算机的能力和工程制图及编写说明书的能力。
使学生受到专业工程师应具备的基本技能的初步训练,为今后的进一步学习和系统训练打下基础。
1.1.3 设计任务完成给水处理厂方案设计,即在给出设计任务的基础上,完成所给资料的分析、整理,进行水厂选址,工艺流程选择,方案比较,构筑物的选型,水厂的平面和高程布置以及处理构筑物的初步设计等工作。
主要任务:完成城市给水处理厂方案设计。
设计规模为(10+M)×104m3/d(M为学生学号的个位数字)。
原水水质资料、地形地址、气象条件等参数见附《城市给水处理厂课程设计基础资料》设计要求:完成水源水质评价,设计包括工艺确定、主体处理构筑物初步设计计算、厂区平面、系统高程和主要管网布置等。
桂林市瓦窑水厂简介

瓦窑水厂建厂初期1958年6月,根据瓦窑工业区的发展规划,成立瓦窑水厂筹备处,开始筹建瓦窑水厂。
该厂位于桂林市南郊瓦窑东路西侧,占地45039平方米。
由中国给谁排水工程中南设计院设计,最初以电厂冷却水为源水。
自治区投资77.15万元,房东义务劳动开挖土方,完成净水构筑物8项。
即:砖砌进水管道1132.2米,各种检查井、吸水井25座,面积120.83平方米、满足生产能力5万立方米/日的加矾室一座,生产能力15万立方米/土坑式平流沉淀池1座,生产能力2万立方米/日快滤池1个,控制室1座,容积1250立方米的清水池1座,面积250平方米、生产能力6万立方米/日供水泵房1座。
净水构筑物完工后,由于各种原因,设备尚未配套,工程即停工。
为满足周围工地的用水,1960年8月简易投产,日供水仅100~200立方米。
使用漂白粉消毒。
1961年瓦窑水厂筹备处撤销,并入桂林市自来水厂。
1966年,新建成的桂林氮肥厂因电厂冷却水水温太高且灰分大,要求瓦窑水厂供应漓江水。
为此,自治区投资12.5万元,氮肥厂投资8万元,在净瓶山西侧江边建固定式直径8米的圆形取水泵房1座,有40千瓦机泵2组,28千瓦机泵1组,吸水井直径4.5米,通过2条管径400毫米自流管与去水头部连接,安装1条500毫米输水管道将源水送至净水厂。
改建后的瓦窑水厂只是改善了源水质量,未增加供水能力。
并先后建成输水干管3条:即瓦窑水厂瓦窑菜市场(位于瓦窑路与净瓶路交叉口东侧)管径350毫米干管1条。
1977年改漂白粉为氯液消毒。
一期扩建工程1983年10月,经自治区批准,瓦窑水厂一期扩建工程开工。
由中国给排水工程中南设计院设计,广西区四建公司负责土建施工,中国有色第十一治安装工程公司负责厂区设备、电气、管道工程。
1988年1月6日投产,供水能力7万立方米/日,总投资1336万元。
取水工程扩建项目有:在老取水泵房上部建筑进行改造,原有机组继续使用;新建箱式取水头部1座,用2条管径1000毫米自流管接入吸水井,吸水井为圆形钢筋混凝土结构,分2格,有单面闸门连通;新安装管径1000毫米输水管(大部分为水泥管)2条,原有管径500毫米输水管报废。
预处理岗位试题库
预处理岗位试题一、填空1活性炭过滤器直径为3600mm,滤层高2600mm。
2影响化学反应速度的因素有:1)温度; 2)反应物的浓度;3) 催化剂。
3双阀滤池滤料高度0.8m,活性碳过滤器滤料高度2.6m。
4预处理储气罐压力达到0.6M pa时开始使用。
5双阀滤池出口浊度≤2mg/l,耗氧量≤2mg/l。
6空白试验是为了消除仪器和试剂误差。
7水中氯离子必须在中性溶液中测定。
8活性炭过滤器用于水处理时,对脱氯和除去有机物有很重要的意义。
9当工作人员受到氯气伤害,症状较轻者应离开现场,口服复方樟脑酊解毒。
症状较重,应吸氧气然后送医务所救护。
10安规规定进入生产现场必须佩戴安全帽。
11安规规定凡2米及以上都属高空作业。
在进行高空作业之前应做好防止高空坠落的安全措施,方可进行高空作业。
12通过反洗,滤料的粒径总是自上而下的逐渐增大,这是滤料的相互摩擦。
13天然水中杂质按其存在状态可分为悬浮物、胶体物和溶解物三大类。
14火电厂内,通常采用的安全电压等级有36V、24V、12V。
15电力安全生产的指导方针是安全第一、预防为主。
16原电池时将化学能转变为电能的一种装置。
17手工取样流速通常保持在500--700ml/min 。
18在水流经过滤池过程中,对水流均匀性影响最大的是疏水装置。
19滴定完毕后,滴定管下端嘴外有液滴悬挂,则滴定结果偏高。
20滤池运行一段时间后,当水压头损失达到一定值时就应进行反洗操作。
21玻璃器皿洗净的标准是均匀湿润,无水珠。
22活性炭过滤器经过大修后,进水试压,应从底部缓慢进水,开空气门,至反排门出水,然后关闭所有阀门。
23用高锰酸钾测定水中耗氧量时,滴定到终点,若溶液的红色在0.5—1min以内不退,就可以认为已到终点。
24活性炭是由含碳为主的物质为原料,经高温炭化和活化制成的疏水性吸附剂。
25石英砂滤池反洗操作时,滤层膨胀高度约为滤层高度的25%--50%26计算循环冷却水的浓缩倍率,一般以水中的氯离子来计算。
水处理100题.
大陆科技公司环保事业部化水专业水处理知识100题2004年8月一、选择题(20题)1、自然界中的水大体可以分为如下三种:大气水、地表水和()。
2、天然水中的杂质,有的呈固态,有的呈液态或气态,它们大多以分子态、离子态或胶体颗粒存在于水中。
如按其颗粒大小不同,可以分为()、()和()三大类。
3、单位水中钙离子的总含量称为(),单位水中镁离子的总含量称为(),()称为总硬度。
4、pH值的定义是(),它是表示水中()强弱的一项指标。
5、化学需氧量(俗称好氧量)是近似表示水中()的指标。
6、生化需氧量是指(),单位为mg/L。
7、按滤池进出口阀门个数,可以将滤池分为()、()、()。
8、H+ 、NH4+、K+、Na+、Mg2+、Ca3+几种不同离子型的强酸阳树脂体积由大到小的排列顺序为:()> ()> ()> ()> ()≈()9、在稀溶液中,H+ 、NH4+、K+、Na+、Mg2+、Ca2+、Al3+、Fe3+几种不同离子型的强酸阳树脂的选择性顺序为:()> ()> ()> ()> ()≈()> ()>()10、在稀溶液中,Cl-、OH-、HCO3-、HSiO3-、NO3-、SO42-几种不同离子型的强酸阳树脂的选择性顺序为:()> ()> ()> ()> ()>()11、固定式离子交换器按运行方式可以分为:()、()、()。
12、浮动床的反洗在()进行,一般10~20个周期反洗一次。
13、一般情况,监测阳床终点用()表;监测阴床终点用()表;监测混床终点用()表或()表。
14、反渗透膜的基本性能一般包括:()、()、()、()等。
15、反渗透的主要操作参数有:()、()、()、()等。
16、控制反渗透装置进水固体颗粒含量的指标是:()和()。
17、一般卷式反渗透膜组件要求SDI<()。
18、反渗透标准化后的流量指()。
污水过滤处理工程技术规范

水厂设计(2)

给水排水设计手册(第3册)城镇给水(第二版)
本手册汇编了城镇给水工程设计和计算的 有关资料,共15章。主要内容包括:给水 工程系统、输配水、地下水和地表水取水、 泵房、净水工艺选择、混凝、沉淀、澄清、 气浮、过滤、消毒、生物预处理、臭氧、 活性炭吸附、除铁、除锰、除氟、水厂排 泥处置以及水厂总体设计等。
给水排水设计手册(第4册)工业给水处理 (第二版)
本手册主要内容包括:工业给水处理方 法和水质分析、水质预处理、药剂软化、 离子交换、膜分离、系统选择与站房设 计、循环冷却水处理、循环水冷却设施、 冷却构筑物计算、冷却构筑物的选择与 布置以及附录等。
给水排水设计手册(第5册)城镇排水(第二版)
本手册根据城镇建设的需要,汇编了城镇 排水设计的有关方法和数据。主要内容包 括:排水管渠及附属构筑物、城镇河湖, 排水泵站、城镇污水和污泥处理及处置、 城镇垃圾处理及处置,以及有关排水标准 和规程等。
给水排水设计手册(第1册)常用资料(第二版)
内容简介: 本手册以给水排水工程设计中常用的数据、 图表为主,主要内容包括:单位换算、理 化数据、水质指标、气象、地质、地震、 管道接口、防水、防腐、绝热、噪声以及 不同材质的管渠水力计算表等。
给水排水设计手册(第2册)建筑给水排水 (第二版)
本手册主要内容包括:建筑给水、建筑消 防、热水及饮水供应、建筑排水、屋面排 水、建筑中水、特殊建筑给水排水、循环 水冷却、给水局部处理、污水局部处理、 湿陷性黄土区及地震区给水排水、居住小 区给水排水、仪表及及设备、管道等。
3.大型水厂(10万m3/d以上)
平流沉淀池→
普快滤池(双阀滤池) V型滤池 移动罩滤池
脉冲澄清池→虹吸滤池
第四节 水厂平面布置和高程布置
17、过滤(2)

d10
A
去掉
将A和B点之间 距离等分,外推 得到0和100%
K值过大;不符 合设计要求
某天然河砂的筛分曲线:d10=0.4mm ;d80=1.34mm ;K80=3.37 设计规范要求:d10=0.55mm;K80=2.0 d80=1.1mm
3、滤料的孔隙率m
滤料层中孔隙的体积 m= 滤料层中孔隙的体积+ 滤料体积
Filtration
7.2 过滤理论
二、过滤水力学
过滤的基本方式
变水头等速过滤 变(减)速过滤 恒水头恒速过滤
3
1、变水头等速过滤
4
(3)优缺点
控制简单;单池过滤水量恒定 进水堰处的跌水为无效水损;出水水质不如减速过滤
好 (4)采用此方式的滤池:虹吸、无阀
2、变(减)速过滤
17-6 无阀滤池(重力式)
结构:无阀门、一个滤间可自成一个系统、进水设置
U型管、小阻力系统、用滤后水进行反冲洗 运行方式:变水头恒速过滤 优缺点 P351 适用范围 小型水厂
17-7 其它形式滤池
一、虹吸滤池 结构:无阀门、6~8个滤间组成一个滤池、小阻力系 统、用滤后水进行反冲洗 运行方式:变水头恒速过滤 优缺点 P353 适用范围 大中型水厂
(三)冲洗强度的确定和非均匀 滤料膨胀度的计算
1、冲洗强度的确定
在设计和运行中,以dmax的vmf为确定q的依据。
q=10kvmf (注意单位) 当dmax=1.2mm、k=1.3时,q=12~15L/(m2.s)
若滤料级配不同于规范,则q应作相应调整 此式不适于双层和多层滤料
2、非均匀滤料的膨胀度
(1)特点
几个滤间组成一个滤池组,滤池组进出水量不变; 进水口在滤池最低水面以下,各滤间的水位相同;普
水处理过滤设备的分类和技术
水处理过滤设备的分类和技术过滤设备(一)压力过滤器压力过滤器也称机械过滤器。
设备用钢材制造,直径一般不超过3m,内壁涂防腐涂料或衬胶。
滤层厚度一般为1.0~终水头损失可达到5~6m。
一般R用单水高速冲洗,为提高冲洗效果,可考虑用压缩空气循助冲洗。
滤料可采用单滤料、双滤料或三层滤料,一般以单、双滤料 压力式过滤器结构示意为多。
在膜处理系统中,双滤料过滤器也称多介质过滤器。
图2-30为双滤料过滤器结构示意。
(二)重力过滤池1.重力式无阀滤池重力式无阀滤池工作原理如下:水从分配槽下的U形进水管进人,通过过滤层汇集到下部集(配)水系统,过滤后的水通过在池壁四角的连通管至集水区(也是反冲洗的储水箱)流出。
随着运行时间的增加,滤层中截留的悬浮物增加而滤层中阻力增大,于是虹吸上升管内水面随之升高。
当阻力继续增大,使水位上升到虹吸辅助管口时,水就由此管中急剧下落,这时虹吸管中空气通过抽气管不断抽走并随水流到排水沟后逸人大气。
同时虹当冲洗水箱水位下降到虹吸破坏管管口以下时,由于空气进人虹吸管内,虹吸作用破坏,反冲洗过程结束,自动进人运行。
无阀虑池刚投人运行时滤层比较清洁,虹吸上升管内、外的水位高度差表示滤池的初期水头损失,一般为200mm左右。
在运行过程中因流量不变,滤层中阻力逐渐增大,虹吸上升管内水位便随之慢慢升高,所以基本上是等速过滤。
无阀滤池自运行开始到虹吸管中抽气这一段时间即是无阀滤池的工作周期,一半在十几小时到几十小时之间,冲洗形成时间为2~3min,冲洗时间约为4-5min。
无阀滤池虹吸管的高度反映运行期终水头损失的允许值,与滤池的工作周期有关,虹吸管的高度一般采用 1.5~2m.。
重力式无阀滤池的标___*构如图2-31。
由于重力式无阀滤池存在进水系统复杂、进水过程易夹气,影响正常的过滤和反冲洗;采用单层石英砂滤料,滤池产水量低等问题有使用单位对240m3 /h重力式无阀滤池进行了技术改造,改造后的重力式无阀滤池产水量提高并较成功地解决了以上几个方面的问题。
第四章 水处理专用设备安装-定额
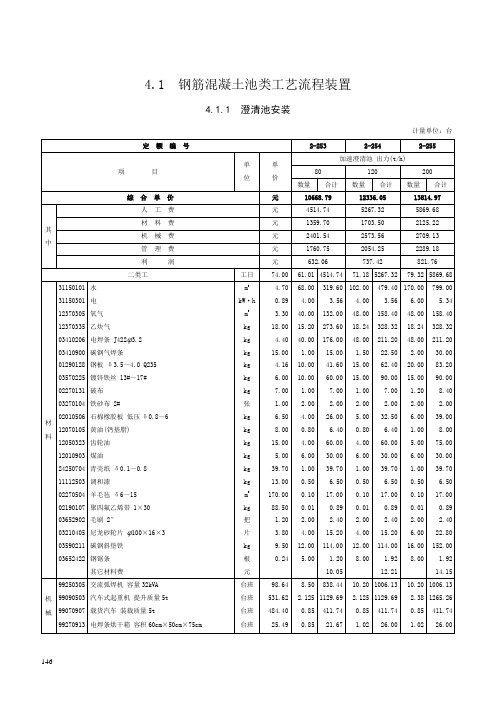
4.1 钢筋混凝土池类工艺流程装置4.1.1 澄清池安装计量单位:台146计量单位:台1474.1.2 虹吸式滤池、重力式无阀滤池安装计量单位:台1484.2 澄清设备4.2.1 澄清器、压力式混合器安装计量单位:台149计量单位:台1504.2.2 重力式双阀滤池、钢制重力式多阀滤池安装计量单位:台1514.3 机械过滤器4.3.1 单流式过滤器安装计量单位:台1524.3.2 双流式过滤器安装计量单位:台1534.4 电渗析器安装计量单位:台1544.5 软化器4.5.1 钠离子软化器安装计量单位:台155计量单位:台1564.5.2 食盐溶解过滤器安装计量单位:台1574.6 衬胶离子交换器4.6.1 阴阳离子交换器安装计量单位:台158计量单位:台1594.6.2 体外再生罐安装计量单位:台1604.6.3 树脂贮存罐安装计量单位:台1614.7 水箱安装计量单位:台162计量单位:台1634.8 除二氧化碳器安装计量单位:台164计量单位:台1654.9 其它水处理设备4.9.1 酸碱贮存罐安装计量单位:m3166计量单位:m31674.9.2 溶液箱、计量箱、搅拌器、喷射器安装计量单位:m3168计量单位:m31694.9.3 吸收器、树脂捕捉器安装计量单位:台170计量单位:台1714.9.4 贮气罐、取样设备安装计量单位:台1724.10 油处理设备安装计量单位:台173计量单位:台1744.11 水处理设备系统试运计量单位:套175计量单位:套176计量单位:套177。
建筑给水排水工程试题库:第17章 过滤(2)
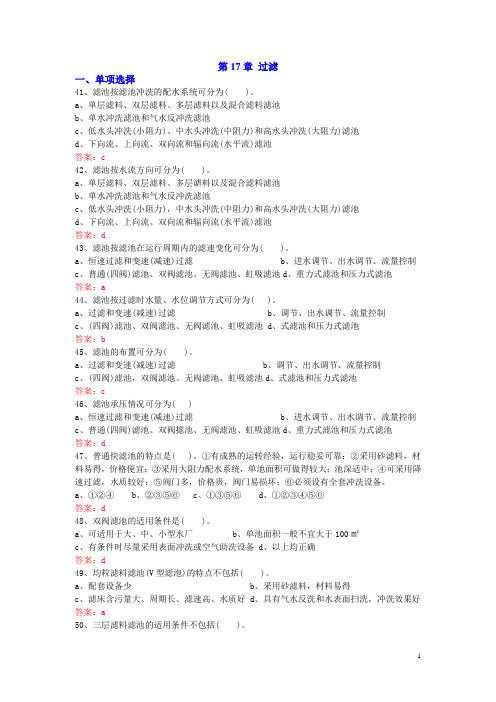
第17章过滤一、单项选择41、滤池按滤池冲洗的配水系统可分为( )。
a、单层滤料、双层滤料、多层滤料以及混合滤料滤池b、单水冲洗滤池和气水反冲洗滤池c、低水头冲洗(小阻力)、中水头冲洗(中阻力)和高水头冲洗(大阻力)滤池d、下向流、上向流、双向流和辐向流(水平流)滤池答案:c42、滤池按水流方向可分为( )。
a、单层滤料、双层滤料、多层谑料以及混合滤料滤池b、单水冲洗滤池和气水反冲洗滤池c、低水头冲洗(小阻力),中水头冲洗(中阻力)和高水头冲洗(大阻力)滤池d、下向流、上向流、双向流和辐向流(水平流)滤池答案:d43、滤池按滤池在运行周期内的滤速变化可分为( )。
a、恒速过滤和变速(减速)过滤b、进水调节、出水调节、流量控制c、普通(四阀)滤池、双阀滤池、无阀滤池、虹吸滤池d、重力式滤池和压力式滤池答案:a44、滤池按过滤时水量、水位调节方式可分为( )。
a、过滤和变速(减速)过滤b、调节、出水调节、流量控制c、(四阀)滤池、双阀滤池、无阀滤池、虹吸滤池d、式滤池和压力式滤池答案:b45、滤池的布置可分为( )。
a、过滤和变速(减速)过滤b、调节、出水调节、流量控制c、(四阀)滤池,双阀滤池、无阀滤池、虹吸滤池d、式滤池和压力式滤池答案:c46、滤池承压情况可分为( )a、恒速过滤和变速(减速)过滤b、进水调节、出水调节、流量控制c、普通(四阀)滤池、双阀摅池、无阀滤池、虹吸滤池d、重力式滤池和压力式滤池答案:d47、普通快滤池的特点是( )。
①有成熟的运转经验,运行稳妥可靠;②采用砂滤料,材料易得,价格便宜;③采用大阻力配水系统,单池面积可做得较大;池深适中;④可采用降速过滤,水质较好;⑤阀门多,价格贵,阀门易损坏;⑥必须设有全套冲洗设备。
a、①②④b、②③⑤⑥c、①③⑤⑥d、①②③④⑤⑥答案:d48、双阀滤池的适用条件是( )。
a、可适用于大、中、小型水厂b、单池面积一般不宜大于100㎡c、有条件时尽量采用表面冲洗或空气助洗设备d、以上均正确答案:d49、均粒滤料滤池(V型滤泡)的特点不包括( )。
《水质工程学1》(给水处理)课程设计计算说明书

《水质工程学 1》课程设计计算说明书
第 1 页 共 27 页
1 工程概述
该工程为某市净水厂工艺初步设计,包括根据原水水质及水厂规模选择处理 工艺,每个工艺构筑物各部分尺寸的详细计算,整个水厂的规划布局以及各构筑 物间高程的确定。
该水厂的设计规模为 940000m3/d,水源水质分析结果如下: 水的臭和味:无 最低温度:0°C 最高温度:38°C 浊度(NTU):10~3000 色度:10~30 度 pH 值:6.5~7.5 碱度:48 度 高锰酸盐指数:5.5~7.5mg/L 溶解氧:8mg/L 细菌总数:280~7300 个/mL 大肠菌群:740~9600 个/mL
7.3 溶解池容积
W2=(0.2~0.3)W1 式中 W2——溶解池容积(m3);
W1——溶液池容积(m3)。 设计中取 W2=0.28W1 W2=0.28×26.30=7.36m3, 溶解池尺寸 L×B×H=2.2×2.2×2.1m,高度中含超高 0.3m,底部沉渣高 0.2m。为操作方便,池顶高出地面 0.8m。采用两个溶解池,一用一备。 溶解池实际有效容积 W2’=2.2×2.2×2.1=7.74m3,满足要求。 溶解池采用钢筋混凝土结构,内壁用环氧树脂进行防腐处理,池底设 0.02 坡度,设 DN100mm 排渣管,采用硬聚氯乙烯管。给水管管径 DN80mm,按 10min 放满溶解池考虑,管材采用硬聚氯乙烯管。
=186.60m2,
设置 6 个格网,每个格网需要的面积为 31.10m2,设计中采用进水部分尺寸 为 B1×H1=5.1m×6.1m,平板格网尺寸选用 B×H=5200mm×6300mm。
兰州理工大学 土木工程学院 给水排水工程
2009 年 7 月 10 日
室外给水设计 (48) 过 滤

过滤对滤料的物理、化学性能作了规定。
9.5.2 关于选择滤池型式的原则规定。
影响滤池池型选择的因素很多,主要取决于生产能力、运行管理要求、出水水质和净水工艺流程布置。
对于生产能力较大的滤池,不宜选用单池面积受限制的池型;在滤池进水水质可能出现较高浊度或含藻类较多的情况下,不宜选用翻砂检修困难或冲洗强度受限制的池型。
选择池型还应考虑滤池进、出水水位和水厂地坪高程间的关系、滤池冲洗水排放的条件等因素。
9.5.3 为避免滤池中一格滤池在冲洗时对其余各格滤池滤速的过大影响,滤池应有一定的分格数。
为满足一格滤池检修、翻砂时不致影响整个水厂的正常运行,原条文规定滤池格数不得少于两格。
本次修订,根据滤池运行的实际需要,将滤池的分格数规定为不得少于 4 格 ( 日本规定每 10 格滤池备用 1 格,包括备用至少 2 格以上;英国规定理想的应有 3 格同时停运,即一格排水、一格冲洗、一格检修,分格数最少为 6 格,但当维修时可降低水厂出水量的则可为 4 格;美国规定至少 4 格( 如滤速在 10/h,同时冲洗强度为 10.8L/(m2·s) 时,最少要 6 格,如滤速更低而冲洗强度较高,甚至需要更多滤池格数 ) 。
9.5.4 滤池的单格面积与滤池的池型、生产规模、操作运行方式等有关,而且也与滤后水汇集和冲洗水分配的均匀性有较大关系。
单格面积小则分格数多,会增加土建工程量及管道阀门等设备数量,但冲洗设备能力小,冲洗泵房工程量小。
反之则相反。
因此,滤池的单格面积是影响滤池造价的主要因素之一。
在设计中应根据各地土建、设备的价格作技术经济比较后确定。
9.5.5 滤池的过滤效果主要取决于滤料层构成,滤料越细,要求滤层厚度越小;滤料越粗,则要求滤层越厚。
因此,滤料粒径与厚度之间存在着一定的组合关系。
根据藤田贤二等的理论研究,滤层厚度L 与有效粒径 d e存在一定的比例关系。
美国认为,常规细砂和双层滤料 L/d e应≥ 1000 ;三层滤料和深床单层滤料 (d e=1~1.5mm),L/d e应≥ 1250 。
东周水厂双阀滤池日常管理浅谈

凰塑笠凰东周水厂双阀滤池日常管理浅谈徐莉李丙珠(郑州市自来水总公司,河南郑州450000)t一。
’?。
i‘。
…。
…‘。
i。
1。
+。
,。
…h !D裔要】滤池在运行中含泥量升高,出现结泥球现象,为更好的进行漉池的维护与管理,对8#滤池滤料进行更换,并对结泥球现象进行+《,,深入研究,为滤池的管理维护进—步奠定基础。
,。
鹾罐词】东周水厂;滤池滤料;除铁锰;泥球;水质;管理维护‘,东周水厂位于郑州市郑东新区,隶属于郑硝市自来水总公司,是一座设计日供水能力20万m3的地下水净水厂。
因东周水厂以黄河侧渗水为地下水水源,水处理工艺中以降低水中铁锰含量为重点,其制水工艺流程如下:原水——曝气氧化——过滤——消毒——清水池——送水泵房——捌}市供水管网。
根据工艺要求,东周水厂建双阀滤池,16组滤池均采用单层石英砂滤科过滤,滤料直径0.6—1D m m,厚12m,滤料层下有四层垫层,整个垫层匣600m r no地下水水质稳定,双阀滤池完全发挥了除铁锰的效果,自2000年正式投产运行至今,滤后水铁锰含量均小于国标要求。
滤池在确保水质安全方面发挥着巨大的作用。
但随着滤池运行时间的增加,逐渐出现一些问题,如滤科的含泥量。
由于单层滤层过滤工艺本身不可避免的缺陷造成表层滤料的孔隙率随着运行时间的增加而喇氏,再结合铁锰沉淀物比重较大,厨中时不能完全排走,造成滤种中洗不净,含泥量上升,出现泥球。
在日常管理中如何处理这种情况,东周水厂做了大量的工作。
面对滤料日趋严重的结泥球、板结、气阻以及表层凹凸不平现象,为深入有效了解16组滤池的真实现状,找出问题的解决办法,经过查阅大量的资料和研究,最后选择问题比较突出的8#池进行试验性滤科检修更换。
在检修过程中,我厂管理人员对粒径存在细微变化的部位进行取样分析和记录,详尽的掌握了滤池滤料的实际状况:1)从挖取的滤料层颜色可以看出,整个滤料层除铁锰效果良好,120c m滤料层中约80c m深的滤料都具有铁锰氧化膜:2)泥球不仅出现在滤科表层,还出现在深层,尤其是埋在滤料深层的泥球多而且大,直径大都在2cm一4cm之间。
滤池比较

给水处理中的过滤一般是指通过过滤介质的表面或滤层截留水体中悬浮固体和其他杂质的过程。
对于大多数地面水处理来说,过滤是消毒工艺前的关键性处理手段,对保证出水水质具有重要的作用。
根据滤池的结构型式不同,目前常用的池型有普通快滤池、双阀滤池、虹吸滤池、V型滤池等。
其中普快滤池使用历史最久,虹吸滤池和无阀滤池是变水头过滤,出水水质不高。
目前大中型水厂采用最多的是普通快滤池,V型滤池和翻板滤池。
1、普通快滤池普通快滤池是传统的快滤池布置形式,滤料一般为单层细砂级配滤料或煤、砂双层滤料,冲洗采用单水冲洗,冲洗水由水塔(箱)或水泵供给。
普通快滤池的工作原理分过滤和反洗两个过程。
过滤时:经过澄清的水浑浊度小于20NTU,从浑水管道经过浑水渠,流入布水槽进入滤池,水经过石英砂滤料层,以8--14m/h过滤速度,将水中的残余杂质截留在石英砂滤料表面剂滤层里面,使水变清为洁净的过滤水。
过滤水经由级配卵石组成的承托层、配水支管、汇集到配水干管。
最后,从过滤水管进入过滤滤池,此时出水浑浊度小于5NTU或更低。
反洗时:先关闭浑水管道导航的进水阀,等滤池的水位下降10cm左右时,再关过滤管上的阀门,然后开启排水管剂冲洗水的排水阀,冲洗水从冲洗水总管,经过配水系统的干管、支管、水从下而上流过承托层和石英砂滤料层,滤料在上升水流的作用下,悬浮起来逐步膨胀到一定高度,使得滤料中的杂质、淤泥冲洗下来,废水进入布水槽,经浑水渠和排水管,排入沟渠,冲洗直至排出水清澈为止。
冲洗强度通常控制在12--15L(s.m2)范围内。
2、V型滤池V型滤池是一种快滤池,进水为V型槽,采用气水反冲洗,适用于大、中型水厂。
V型滤池的主要特点是:可采用较粗较厚滤层以增加过滤周期,由于反冲时滤层不膨胀,故整个滤层在深度方向的粒径分布基本均匀,不发生水力分级现象,即所谓“均质滤料”,使滤层含污能力提高。
气水反冲洗均粒滤料滤池的主要特点是滤料粒径更均匀、粒径更粗、滤层厚度更大,具有更强的截污能力,保证了出水水质,延长了过滤周期,节约冲洗水量。
水的过滤处理

过滤机理 3. 接触絮凝 滤料巨大的比表面积:吸附 砂粒带有电荷:吸附胶体 粒径较大悬浮颗粒以阻力截留为主;细微 悬浮物,以发生在滤料深层的重力沉降和 接触絮凝为主。
1.4.1.2 滤料层含污能力
①
②
③
表层滤料间的孔隙逐渐被堵塞,形成“泥 膜”,致使过滤阻力剧增。 在一定过滤水头下,滤速急剧减小,产水 效率下降; 在一定滤速下水头损失达到极限值,无法 满足过滤水头要求; 由于滤层表面受力不均匀而使“泥膜”产 水裂缝,大量水流自裂缝流出,水中杂质 颗粒穿透滤层使出水水质恶化。
1.4.2 水的过滤处理技术
1.4.2.1 普通快滤池组成与工作过程 组成:池体、滤料、配水系统与承托层、 反冲洗装臵 工作过程:过滤、冲洗交替进行
1.4.2 水的过滤处理技术(视频)
1.4.2.2 滤料
滤料的主要作用是作为载体提供黏附水中 细小悬浮物所需的面积。 (1)足够的机械强度 (2)足够的化学稳定性 (3)具有一定的颗粒级配和适当的孔隙率 (4)外形接近球形,表面比较粗糙而有棱 角。 (5)就地取材,货源充足,价格低廉。
粒径大空隙大细小杂质穿透滤料层反洗难充分松动滤料粒径过小空隙效增加水流阻力反洗时容易冲出滤池以石英砂滤料为例取某砂样300g洗净后于105摄氏度恒温箱中烘干待冷却后秤取100g放于一组筛子过筛筛后称出留在各个筛子上的砂量填入表111并计算出通过相应筛子的砂量然后以筛孔孔径为横坐标通过筛孔砂量为纵坐标绘出筛分曲线
3. 承托层
配合管式大阻力配水系统使用,承托层设 于滤料层和底部配水系统之间。 作用: 一是支承滤料,防止过滤时滤料通过配水 系统的孔眼流失; 二是反冲洗水时均匀地向滤料层分配反冲 洗水。
污水处理中离心分离及过滤处理

离心分离及过滤处理离心分离分离效果,远超过重力沉降法。
一、离心分离原理离心分离因数,用Kc 表示,是反映离心分离设备性能的重要指标。
22222/900c T T c g F mu r u r n r K F mg rg g gωπ=====n 和r 越大,设备的分离性能越好。
综合分析:当离心设备的转速提高时,分离效率也会大大提高。
二、旋流分离器1.压力式水力旋流分离器P46图2-32水力旋流器的分离因数不太高。
目前水力旋流器都用来去除液体中密度较大的沙粒等悬浮颗粒,而它的分离效率又与悬浮粒直径密切相关。
分离效率是50%的颗粒直径称为极限直径,它是判别水力旋流器分离程度的主要标准之一。
压力式水力旋流器优点是体积小,单位容积处理能力高,构造简单,易安装维修。
缺点是设备易磨损,动力消耗大。
2.重力式水力旋流沉淀池图2-34为处理轧钢污水的重力式水力旋流沉淀池构造示意图。
重力式水力旋流池设备容积大,由于它是靠进出水的水力差为动力,故能耗低,但表面负荷也低得多。
三、离心分离机离心机的主要部件是一高速旋转的转鼓。
转鼓安装在竖直或水平的轴上,由电动机带动旋转,同时也带动要处理的液体一起旋转。
离心机的种类很多,按其离心因数的大小来区分有常速离心机 (Kc<3000),主要用于 一般悬浮液的分离和污泥的脱水;高速离心机 (Kc>3000),主要用于细粒状悬浮液; 超速离心机 (Kc>12000),主要用于分离颗粒极细的乳化液、油类。
过滤处理在水处理技术中,过滤一般是指以具有孔隙的粒状滤料层,如石英砂等,来截留水中悬浮杂质,从而使水获得净化的工艺过程。
过滤的功效:去除水中微小颗粒和细菌。
在饮用水净化工艺中,过滤不可缺少。
在污(废)水的深度处理中也得到应用。
一、基本概念人类早期使用的滤池是生产率极低的慢滤池,其滤速为0.1~0.3m/h。
现在使用的滤池滤速可达10m/h以上,故称其为快滤池。
快滤池工作的先决条件是必须先投加混凝剂。
双阀滤池原理

双阀滤池原理双阀滤池是一种常用的水处理设备,它通过特定的原理来实现对水质的过滤和净化。
本文将详细介绍双阀滤池的原理及其工作过程。
一、双阀滤池的构造双阀滤池由滤池体、进出水阀、排污阀、滤料和控制系统等组成。
滤池体一般采用高强度的不锈钢材料制成,具有良好的耐腐蚀性能和结构稳定性。
进出水阀用于控制水的进出,排污阀则用于排放滤池内的污水。
滤料是指填充在滤池内的各种颗粒物质,如石英砂、活性炭等。
控制系统则负责监测和控制滤池的工作状态。
二、双阀滤池的工作原理双阀滤池的工作原理主要包括过滤和反冲洗两个过程。
在过滤过程中,水通过进水阀流入滤池体内,经过滤料的过滤作用,其中的杂质、悬浮物等被截留在滤料中,而净化后的水则从出水阀流出,供给后续的使用。
当滤池内的滤料逐渐累积了一定的污物后,会影响滤池的过滤效果,此时需要进行反冲洗操作。
在反冲洗过程中,首先关闭进水阀和出水阀,打开排污阀,将滤池内的污水排放出去。
然后,通过控制系统控制反冲洗泵,将清水从反冲洗泵的出口引入滤池体内,通过滤料的冲洗作用,将滤料中的污物冲刷出来,并通过排污阀排出。
经过一段时间的反冲洗后,关闭排污阀,打开进水阀和出水阀,滤池恢复到过滤状态,继续提供净化后的水。
三、双阀滤池的优点1.高效净化:双阀滤池采用多层滤料,具有较大的过滤面积,能够有效地净化水质,去除悬浮物、颗粒物等杂质。
2.自动控制:双阀滤池配备了先进的控制系统,能够实现自动化的操作和控制,减轻人工维护的负担。
3.可靠稳定:双阀滤池的滤料采用高质量的材料制成,具有良好的耐腐蚀性和稳定性,能够长期稳定地工作。
4.节能环保:双阀滤池在反冲洗过程中采用清水进行冲洗,相比传统的滤池,能够节约大量的水资源,降低排污量,达到节能环保的效果。
四、双阀滤池的应用领域双阀滤池广泛应用于工业生产、城市供水、污水处理、游泳池净化等领域。
在工业生产中,双阀滤池能够有效地去除水中的杂质,保证设备的正常运行;在城市供水中,双阀滤池能够提供清洁卫生的饮用水;在污水处理中,双阀滤池能够去除废水中的污染物,达到排放标准;在游泳池净化中,双阀滤池能够去除水中的杂质和细菌,保障游泳者的健康安全。
双阀滤池工作原理

双阀滤池工作原理
双阀滤池是一种用于水处理的设备,它通过利用滤料对水中的杂质进行过滤,提供清洁的水源。
它的工作原理如下:
1. 进水阀:水从进水管道进入滤池,进水阀控制水的进入速度和流量。
2. 进水分配器:进入滤池后的水通过进水分配器均匀分配到滤料层上。
3. 滤料层:滤料层由一定种类和大小的颗粒状物质组成,如砂、石英砂等。
水分布在滤料层上,通过滤料层时,杂质被滤料截留,净水流经滤料层的底部向下排出。
4. 上排阀:当滤料层滤过一定时间后,滤料层上会有一定厚度的污垢积聚。
上排阀通过控制的方式,在滤料层上方形成一定压力,从而通过底部排水装置排除滤料层上的污垢。
5. 净水排出:经过滤料层后的净水通过底部排水装置,通过排水管道排出滤池。
排出的净水可以用于不同的目的,如供给生活用水或工业用水。
通过循环使用上述的工作原理,双阀滤池能够持续过滤水源中的杂质,提供清洁的水源供应。
需要定期对滤料进行清洗和更换,以保证滤池的过滤效果。
给水第八章

虹吸滤池的优缺点
优点: 1.不需要大型闸门及相应的电动或水力等控制 设备; 2.不需要设置冲洗水箱或冲洗水泵; 3.操作管理方便及易于实现自动化等。 4. 可以在一定的范围内,根据来水量的变化自 动均衡地调节各格滤池的滤速,不需要滤速 控制设施; 5. 滤出水水位永远高于滤层,不会发生负水头现象。 缺点: 1.池深较大(5 6 m), 池体构造较复杂; 2.冲洗水排水槽的水浪费掉,消耗水量较大; 3.冲洗强度受其它几格滤池出水量的影响,故冲洗效果 不象普通快滤池那样稳定。
滤池个数 2 3 3或4 4~6 5~6 6~8
4.滤池深度
滤池深度包括,
保护高:0.25~0.3m;
滤层表面以上水深:1.5~2.0m;
滤层厚度:0.7-0.8m, 见表4-2;
承托层厚度:0.3-0.4m, 见表4-5和表4-6。
因此,滤池的总深度一般为3.0~3.5m。单层石英 砂滤池深度一般稍小;双层和三层滤料滤池深度稍大。
H大,对冲洗不利,一般通过减小H,加大反冲洗水箱面 积的方法,来减小反冲洗的不均匀程度。 一般采用两格滤池合用一个冲洗水箱的方法,使H减小
(3)进水管U型存水弯
作用:防止空气通过进水管进入虹吸管而破坏虹吸。 存水弯的安装:存水弯底部设在水封井的水面下。 (4)进水分配槽 作用:通过槽内堰顶溢流使各格滤池独立进水,并保持 进水流量相等。 分配槽堰顶标高Z1等于虹吸 辅助管和虹吸管连接处的管口 标高Z2加进水管的水头损失h ,再加 10~15cm富裕高度,以 保证堰顶自由跌水。槽底标高 力求降低以便于气水分离。
清水渠
(a)
图4-26 (a) 普通快滤池-“四阀滤池”
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键词:双阀;SLC500;控制系统;InTouch;程序结构
1 前言
杭州制水四公司在四阀滤池改造成功经验基础上,采用美国Rockwell公司产品SLC500,实现了对三万吨双阀滤池(六阀滤池)全自动控制及两套滤池的联网控制。本项目难点在两方面:①三万吨滤池实现集中控制,即四个滤池全自动控制集中到一个PLC上来实现,关键在于程序结构的编排,合理编排结构对整个程序控制实现影响很大;②在三万吨滤池的上位机上实现对四万吨滤池的控制,合理采用多个读写命令、采样时间,以避免采样时间太短引起读写中断、死机,使公共PLC失去与三万吨滤池的PLC通讯,从而不能控制四万吨滤池。
参考文献:
[1]陈晓嘉.可编程序控制器系统[M].浙江:浙江大学出版社.
[2]胡寿松.自控原理[M].国防工业出版社.[3]Intouch软件电子帮助手册[Z].
它应用程序的请求。发出请求的应用程序叫做客户端。某些应用程序,如InTouch,可以同时作为客户端和服务器。InTouch使用由三部分组成的命名来识别I/O服务器RSLinx程序中的数据元素,这三部分是应用程序名、主题名和项目名,通过指定上述三部分来打开通往服务器程序的通道。该项目中的应用程序名即RSLinx;主题名是在RSLinx中预先定义好的名称,主要包括PLC的型号、站号等信息;项目名是PLC中的具体地址。
该系统由一台计算机实现管理与控制,可以清晰地掌握滤池的过滤、等待、反冲等运行情况。在画面上有动态的工艺显示,实时、历史的报警记录窗和曲线记录窗,以及各种参数设定的弹出窗。主要实现了以下功能:
(1)在计算机上可以动态的反映水塔水位、各清水池水位以及各滤池液位,同时对这些数据均具有实时及历史记录,技术人员可以很方便对生产运行情况进行分析。
一个主程序(SLC500规定程序中只能有一个主程序)其主要内容包含初始化命令、四个滤池自动状态子程序、四个滤池现场状态子程序、四个滤池手动状态子程序、排泥阀手动命令(排泥阀仅为手动命令状态),如图3所示。
初试化命令主要内容包含:模拟量模块初试化命令;中间变量的清零;各个时间、计数器初始值的赋值。
4 程序的整体结构
针对三万吨双阀滤池控制方式及点数,考虑到四个滤池程序段比较长,重复性多,为便于编制及后期调试,采用一个主程序和各个滤池子程序的程序结构。
其优点:①程序结构条理清楚,调试中容易查找程序段;②在调试过程中容易发现问题故障,解决问题;③程序中程序段之间影响及子程序之间影响小,易编程。
3 控制系统构成
3.1硬件构成及网络结构
此控制系统分为两套系统:一套是四万吨滤池,共有六组滤池,每个滤池都有各自的PLC,采用是电动阀控制;另一套是三万吨滤池,共有四个滤池,只有一个PLC,采用是双阀控制。由于两套滤池共用一个反冲塔,所以两组共用一个公共PLC,这个公共PLC主要用来控制两套滤池的反冲洗排队。各个PLC之间及上位机采用DH485工业局域网络(LAN)来通讯,DH485通讯协议是一种采用令牌式传递的通讯方式,最大速率达19.2Kbps,最大距离1.2公里;四万吨的上位机与PLC之间连接是串口
(2)对于各类泵、阀门等设备的运行状况具有实时动态反映功能,同时对设备的故障实时报警、确认报警信息作记录,并具有历史报警记录,以备查用设备运行情况。
(3)实现对泵、滤池以及阀门的控制。对于滤池中的阀门以及反冲泵的阀门可以实现3种控制方式,分别是手动、现场和自动方式。使操作人员有多种池的整个工艺流程分为三个过程:反冲洗过程、整理过程、正常过滤即PID调节。双阀滤池控制同四阀滤池控制的区别是要实现对进水和排水的虹吸控制,如何判断虹吸形成条件是实现双阀滤池的自动控制的重点之一,电接点真空表由于接点的接触稳定性差,不宜采用;加装压力变送器用反馈负压值来判断真空度,但费用相对要增加,也不宜采用;这里采用的是计算液位的相对变化值来判断虹吸形成,从实际效果来看,是可行的。
接法;三万吨的上位机与PLC之间采用KTX卡进行连接。PLC是Rockwell公司产品SLC500系列。水位仪采用E+H超声波物位测量仪。
3.2滤池水位调节原理
采用滤池水位控制可以实现恒速过滤控制方式,调节原理如图2所示。由水位仪测得滤池水位值和水位设定值的偏差,经过PID运算,计算值通过伺服功能块对出水电动阀进行开关控制。伺服功能块将电动阀作为具有开和关两个动作的执行机构来执行PID控制。它??出水阀的控制,当偏差值大于零,开电动阀门;当偏差值小于零,关电动阀门;当偏差等于零,电动阀门保持原状态。
四个滤池自动状态子程序包含此滤池的子主程序和子程序。子主程序中包含反冲状态子程序、滤池整理状态子程序、正常过滤状态子程序。
四个滤池现场状态子程序主要内容包含:①在滤池由自动状态转到现场时已发出的命令必须全部复位。②自动状态中的某些变量,如时间变量、计数器变量等必须复位。③针对反冲必须在这个状态下发出一个结束反冲命令。
?设定的工作时间时正常进入反冲洗。或者根据滤池实际运行情况,由操作人员进行强制反冲。(5)工艺参数设置。包括滤池的控制水位、最高水位、最低水位、设定工作时间、反冲设定时间、反冲完成后整定时间、反冲阀首开时间及PID参数。
(6)该系统可以设置多个访问用户及权限,不同的权限对应不同的操作,起到一定的保护作用。
6 结语
实践证明,在正常情况下,三万吨滤池水位控制在设定水位的±3cm范围内,PID调节能在3~5分钟内进入正常设定水位控制,并实现了自动过滤,以及三万吨四个滤池和四万吨六个滤池定时自动排队和反冲。本系统还实现了在三万吨滤池的上位机上完成对两组滤池的所有阀门和反冲泵及真空泵的手动/自动集中控制。克服了双阀虹吸管带来的水位上下变化波动大的不稳定因素。从试运行情况来看,整个控制系统的设计基本满足了生产要求,达到了预期效果,实现用采用国产电动阀进行双阀滤池自动控制的目的。
四个池子手动状态子程序包含各个阀门的手动操作命令。
对于滤池的反冲控制约束条件为:滤池工作时间超过设定值,或者清水阀开足而滤池水位长时间调节不到位。只要达到其中一个条件,就进行反冲。另外,也可以用强制反冲按钮或远程手动的方式,不定时完成反冲。
对于十个滤池共用一个反冲塔的情况,本系统专门采用一个PLC来实现十个滤池的排队,通过公共程序的读写命令采集整个滤池的反冲信息及具体水位情况并发出命令。公共程序的主要内容是:反冲泵控制程序、公共PLC与其他各个PLC信息的读写程序和滤池排队程序。三万吨滤池读写命令程序是:每个滤池在公共程序中各有一个读命令,而采用一个写命令,采样时间是1秒。
5 软件及功能
该系统的上位机监控部分是由Wonderware公司的InTouch软件编制而成的。同时InTouch利用动态数据交换(DDE)协议,与第三方的I/O服务器RSLinx程序实现通讯,RSLinx通过DH485协议与PLC通讯。
DDE由Microsoft开发的通讯协议,该协议允许Windows环境下的应用程序彼此发送/接收数据和指令。它在两个同时运行的应用程序之间实现客户端与服务器的关系。服务器应用程序提供数据并接受其