基于单片机的电机转速测量系统设计毕业设计论文附图及源程序
基于C51单片机直流电机测速仪设计

基于C51单片机直流电机测速仪设计摘要:电机的转速是各类电机运行过程中的一个重要监测量,测速装置在电机调速系统中占有非常重要的地位,特别是数字式测速仪在工业电机测速方面有独到的优势。
本文介绍了一种基于C51单片机的光电传感器转速测量系统的设计。
系统采用对射式光电传感器产生与齿轮相对应的脉冲信号,使用AT89C51单片机采样脉冲信号并计算每分钟内脉冲信号的数目,即电机对应的转速值,最终系统通过LCD实时显示电机的转速值。
经过软硬件系统的搭建,分别通过Protues软件系统仿真实验和实际电路搭建检查实验。
仿真实验表明本系统满足设计要求,并且结构简单、实用。
整个直流电机测速系统在降低测速仪成本,提高测速稳定性及可靠性等方面有一定的应用价值。
关键词:转速测量;光电传感器;单片机Based On C51 SCM Single DC Motor Speedometer DesignABSTRACT:Motor speed is all kinds of motor operation is an important process to monitor the amount of speed measuring device in the motor control system occupies a very important position, Especially the digital speedometer in the industrial motor speed has unique advantage. This paper describes a photoelectric sensor 51 SCM-based speed measurement system design. System uses a beam photoelectric sensor generates a pulse signal corresponding to the gear, the use of a sampling pulse signal AT89C51 SCM and calculating the pulse per minute, the number of signals that the speed of the motor corresponding to the value of the final system time through the LCD display the motor speed value.After a hardware and software system structures, respectively, through Protues software system to build the actual circuit simulation and experimental examination. Simulation results show that the system meets the design requirements, and the structure is simple and practical. DC Motor Speed entire system in reducing speedometer costs, improve reliability, speed stability and a certain application value.Keywords: Speed measurement; Photoelectric; Single chip micyoco目录1 绪论 (1)1.1 数字式转速测量系统的发展背景 (1)1.2 转速测量在国民经济中的应用 (1)1.3主要研究内容 (2)1.4 设计的目的和意义 (2)2 转速测量系统的原理 (4)2.1 转速测量原理 (4)2.2 转速测量计算方法 (5)3转速测量系统设计方案 (7)3.1 直流电机转速测量方法 (7)3.2 设计任务及方案 (8)4 直流电机测速系统设计 (9)4.1 单片机AT89C51介绍 (9)4.2 转速信号采集 (14)4.2 转速信号处理电路设计 (16)4.4 最小系统的设计 (17)4.4.1复位电路 (17)4.4.2 晶振电路 (20)4.5 显示部分设计 (20)5 直流测速系统仿真 (24)5.1 直流测速系统仿真 (24)5.1.1单片机最小系统仿真 (25)5.1.2 数码管显示仿真 (25)5.2 主程序流程设计 (26)5.2.1 主程序流程设计 (26)5.2.2 定时器的初始化 (27)5.3 实际电路实验 (28)参考文献 (30)致谢 (31)1 绪论1.1 数字式转速测量系统的发展背景在现代工业自动化高度发展的时期,几乎所有的工业设备都离不开旋转设备,形形色色的电机在不同领域发挥着很重要的作用。
毕业设计(论文)-基于单片机的RLC检测仪

基于单片机的RLC检测仪摘要在应用中,我们常常要用到电阻、电感、电容等最基本的元器件,而对它们的测量就成为了我们经常要做的一件事。
因此,设计一个安全、便捷的RLC检测仪就很有必要了。
硬件方面,以51单片机为核心。
测量电阻和电容,以555芯片为核心,与少量的电阻、电容相连组成振荡电路,再根据电容的充放电过程,使测量电路输出高低电平矩形波。
测量电感,是以mc1648压控振荡器为核心,外接电感、电位器、变容二极管等,组成LC振荡电路,调节变容二极管,使电路发生谐振,输出矩形波。
这样,就把所得的波形送给单片机,通过51单片机的定时/计数功能计算矩形波的频率,再通过公式来算出电阻、电感、电容的参数值,并送显示器显示。
软件方面,通过Keil,用C语言来编程,利用软硬件的结合,制作出一个快速的、方便的、符合实际应用的RLC测量仪。
关键词:51单片机,555电路,1602LCD显示, mc1648压控振荡器ABSTRACTIn applications,we often use the resistance,the capacitance and the inductance etc.The measurement of these components is a thing that we often do.So,it is necessary to design a safe and convenient detector of RLC.In the aspect of hardware,I painting the circuit diagram by Proteus.With 51 SCM as the core and through the oscillating circuit of RC by the 555 timing,we can make themeasurement circuit output a high level rectangle wave by using the process of charging and discharging. With the mc1648 vco as the core,we can form the LC oscillating circuit by the external inductor,potentiometer and transfiguration diode in the measurement of inductance.We can make the circuit produce resonance by adjusting the transfiguration diode.And it can output a high level rectangle. We can calculate the frequency of the rectangle wave through the timing and counting functions of 51 SCM.So we can calculate the parameters of impedance through the formula and show it out through the display.In the aspect of software,I programming by using C language in Keil.With the combination of hardware and software,I will make a quick and actual detector.KEY WORDS: 51 SCM 555 Circuit 1602LCD displays Mc1648 VCO目录1、绪论 (5)1.1本课题的背景、意义及目的 (5)1.2简述本课题在国内外的发展概况及存在的问题 (5)1.3本课题主要研究方法、需要重点研究的问题及解决思路 (6)2、总体方案设计的说明 (7)2.1总体方案的选择 (7)2.2总体方案的分析 (8)3、硬件设计 (9)3.1单片机控制部分 (9)3.2显示部分 (13)3.3测量部分 (16)3.3.1 555定时器 (16)3.3.2 mc1648压控振荡器 (19)3.3.3测电阻的电路 (20)3.3.4测量电容的电路 (21)3.3.5测量电感的电路 (22)4、软件设计 (25)4.1液晶显示部分 (26)4.2定时/计数部分 (28)5、调试与仿真 (29)6、结论 (37)致谢 (38)参考文献 (39)附录 (40)附录一源程序 (40)1、绪论1.1本课题的背景、意义及目的测量是通过实验的方法获得定量信息的过程。
基于单片机的电机转速测量系统设计_(附图及源程序)

摘要在工程实践中,经常会遇到各种需要测量转速的场合,测量转速的方法分为模拟式和数字式两种。
模拟式采用测速发电机为检测元件,得到的信号是模拟量。
数字式通常采用光电编码器,霍尔元件等为检测元件,得到的信号是脉冲信号。
随着微型计算机的广泛应用,特别是高性能价格比的单片机的出现,转速测量普遍采用以单片机为核心的数字式测量方法。
本文便是运用AT89C51单片机控制的智能化转速测量仪。
电机在运行过程中,需要对其进行监控,转速是一个必不可少的一个参数。
本系统就是对电机转速进行测量,并可以和PC机进行通信,显示电机的转速,并观察电机运行的基本状况。
本设计主要用AT89C51作为控制核心,由霍尔传感器、LED数码显像管、HIN232CPE电平转换、及RS232构成。
详细介绍了单片机的测量转速系统及PC机与单片机之间的串行通讯。
充分发挥了单片机的性能。
本文重点是测量速度并显示在5位LED数码管上。
其优点硬件是电路简单,软件功能完善,测量速度快、精度高、控制系统可靠,性价比较高等特点。
关键字:MSC-51(单片机);转速;传感器目录摘要 (1)Abstract .................................... 错误!未定义书签。
1 序言 (1)2 系统功能分析 (2)2.1 系统功能概述 (2)2.2 系统要求及主要内容 (3)3 系统总体设计 (4)3.1 硬件电路设计思路 (4)3.2 软件设计思路 (4)4 硬件电路设计 (6)4.1 单片机模块 (6)4.1.1 处理执行元件 (6)4.1.2 时钟电路 (10)4.1.3 复位电路 (11)4.1.4 显示电路 (12)4.2 霍尔传感器简介 (15)4.2.1 霍尔器件概述 (15)4.2.2 霍尔传感器的应用 (16)4.2.3 AH41霍尔开关 (17)4.3 发送模块 (18)5 软件设计 (22)5.1 单片机转速程序设计思路及过程 (22)5.1.1 单片机程序设计思路 (22)5.1.2 单片机转速计算程序 (23)5.1.3 二-十进制转换程序 (24)5.2 程序设计 (27)6 系统调试 (29)6.1 硬件调试 (29)6.2 软件调试 (30)6.3 综合调试 (32)6.4 故障分析与解决方案 (33)6.5 结论与经验 (34)参考文献 (36)致谢 (37)附录 (38)附录1 电路原理图 (38)附录2 元器件清单 (39)1 序言智能化转速测量可以对电机的转速进行测量,电机在运行的过程中,需要对其平稳性进行监测,适时对转速的测量有效地可以反映电机的状况。
直流电机速度PID控制系统设计毕业论文(设计).doc.doc
序号(学号〉: 161240303长春大学 毕业设计(论文)直流电机速度PID 控制系统设计李一丹国际教育学院自动化1612403曹福成2016 年 5 月 30 0姓 名 学 院 专 业 班 级 指导教师直流电机速度PID控制系统设计摘要:针对现有的直流电机控速难的问题,本文设计了一种基于ATmegal6L单片机的直流电机速度控制系统。
本系统以ATinegal6L单片机为主控制器,搭载了L298n为电机驱动,通过霍尔元件进行测速,通过按键控制电机的转动方向和转动速度,并配以温度传感器DS18B20对温度进行监测,通过PID算法调节PW\1 进行对速度控制。
该系统包括的模块主要有单片机为主体的控制模块、电机的驱动模块、对电机速度进行监测的模块、由LCD1602构成的显示ky r模块、电源模块和按键控制模块等。
本系统可以通过PID算法实现可编程脉宽波形对直流电机的速度进行控制,并且可以显示出当前电机的转速。
关键词:单片机;PID算法;直流电机The design of DC motor speed control system with PID Abstract: According to the existing DC motor speed control problem, this paper describes the design of a DC motor speed control system based on ATmegal6L MCU. To ATMEGA16L microcontroller as the main controller for the system, equipped with a L298n for motor drive, through the hall element of speed, through the buttons to control the motor rotation direction and the rotation speed, and the temperature sensor DS18B20 the temperature monitoring, PID algorithm is used to adjust the PWM control of the speed. The system includes the following modules display microprocessor control module, as the main body of the motor drive module, monitoring module, the speed of motor is composed of LCD1602 module, power supply module and key control module.This system can realize through PID algorithm to control the speed of the programming pulse waveforms of DC motor, and can display the current motor speed.Keywords: single chip microcomputer, PID algorithm, DC motor ky r戈ml ml ——II —In —In | * 11—I 1111 ml 1111目录Bit (1)l.i选题背景及意义 (1)1.2国内外研宄现状 (2)1.3木文主要研究的内容 (3)第2章总体方案论述 (4)ky r2.1系统主要传感器介绍 (4)2.1.1温度传感器 (4)2.1.2转速检测模块 (5)2.2系统总体功能及方案选择 (6)2.2.1系统所需模块及功能 (6)2.2.2主控制器选择 (8)第3章系统总体硬件设计 (10)3.1单片机最小系统 (10)3.1.1ATmegal6L单片机的引脚分布 (10)3.1.2最小系统的硬件电路 (13)3.2电机驱动电路 (14)3.3温度检测电路 (15)3.4光电管提示电路和按键控制电路 (15)3.5LCD1602 显示电路 (16)3.6电源电路 (17)3.7本章小节 (18)第4章系统软件设计 (19)4.1系统总体流程图 (19)4.2 PID算法简介 (19)4.2.1PID算法介绍 (20)4.2.2HD算法结果 (21)4.3系统调试步骤 (21)4.4误差分析即改进方法 (22)给论 (23)致谢 (24)参考文献 (25)隱 (26)附录I系统总体硬件电路图 (26)附录II系统中部分程序 (27)ky r In—ml ml ml ml | , I af—.第1章绪论1.1选题背景及意义电动机简称电机,俗称马达,在现实生活中,我们处处都可以见到电机的身影,小到小学生玩的电动四驱车,大到炼钢厂用的滚动罐,这些都是电机家族的成员。
毕业设计(论文)-单片机控制的电机交流调速系统设计

毕业设计毕业设计任务书摘要............................................................................................. 错误!未定义书签。
第1章引言................................................................................. 错误!未定义书签。
1.1单片机的产生和发展.......................................................... 错误!未定义书签。
1.2交流调速系统的现状.......................................................... 错误!未定义书签。
第2章硬件设计....................................................................... 错误!未定义书签。
2.1系统总体方案设计.............................................................. 错误!未定义书签。
2.2主回路设计.......................................................................... 错误!未定义书签。
2.2.1整流滤波电路的设计................................................ 错误!未定义书签。
2.2.2整流电路意义总结.................................................... 错误!未定义书签。
2.3整流电路分类...................................................................... 错误!未定义书签。
基于MSP430F6638的直流调速系统设计

南 京 理 工 大 学毕业设计说明书(论文)作 者:姜泽飞 学 号: 1010190425 学院(系):自 动 化 学 院 专 业:电气工程及其自动化 题 目:基于MSP430F6638的直流调速系统设计指导者:评阅者:2014年5月徐志良 教授 讲师 朱建良毕业设计说明书(论文)中文摘要毕业设计说明书(论文)外文摘要本科毕业设计说明书(论文)第Ⅰ页共Ⅰ页目次1 绪论 (1)1.1 引言 (1)1.2 MSP430F6638直流调速系统的应用及意义 (1)1.3 课题目的 (2)1.4 MSP430F6638直流调速系统的国内外研究现状和发展趋势 (2)1.5 课题要求 (3)2 MSP430F6638直流调速系统的设计 (4)2.1 段式液晶显示器 (6)2.2 拨盘电位器 (9)2.3 直流电机 (11)2.4 光耦测速模块 (13)3 系统软件设计 (14)3.1 段式液晶显示器关键程序设计与实现 (15)3.2 直流电机关键程序设计与实现 (15)3.3 ADC12与电位器关键程序设计与实现 (16)3.4 直流电机调速主程序设计与实现 (17)4 系统调试 (19)总结和展望 (22)致谢 (24)参考文献 (25)附录 (26)1 绪论1.1 引言当今社会[1],随着科技的创新与进步,以及人们对电的更多依赖,电机控制系统人们的日常生活与工作起着举足轻重的作用,上至航空航天,下至工业农业,无处不见电机控制系统。
因此,就目前看来,人们对电机控制系统的不断完善和开发,有着十分重要的作用。
自从19世纪以来,直流电动机调速系统就已经被广泛的应用到各个角落,而且在电机调速领域中占据着半壁江山,它不仅方便可靠,而且在磁场恒定不变的情况下,转速和电压成正比,相对而言更容易控制转矩;他的启动性能相比较而言非常好,可以更平缓和经济的调整转速。
因此,在大多数情况下,我们如果想得到更好的动态特性的话,就可以用直流电机调速。
基于单片机的电机控制系统的设计毕业设计任务书
毕业设计(论文)任务书题目:基于单片机的电机控制系统的设计系名信息工程系专业电子信息工程学号学生姓名 xxx指导教师职称讲师年月日一、原始依据(包括设计或论文的工作基础、研究条件、应用环境、工作目的等。
)1、工作基础根据本课题所在研究领域的研究成果,运用丰富的网络资源,将在大学本科阶段所学过的电机控制、C语言程序设计和单片机的相关知识进行汇总和融合,学生具有足够的知识储备和资源来完成该毕业设计.2、研究条件熟悉电机控制的工作原理,以及本课题中涉及到的单片机等课程的相关知识.本设计中使用Proteus仿真软件进行软硬件的虚拟仿真,该仿真软件是一种电路分析与实物仿真的电子设计自动化软件,运行于Windows操作系统上,有丰富的元器件及虚拟仪器仪表,可以实现数字、模拟电路、微控制器系统仿真以及PCB设计等功能。
运行于Windows操作系统上,有丰富的元器件及虚拟仪器仪表,可以实现数字、模拟电路、微控制器系统仿真以及PCB设计等功能.3、应用环境步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。
因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、以及各种可控机械工具等,具有一定的实用价值。
4、工作目的通过毕业设计要求学会使用Proteus仿真软件进行单片机的硬件设计和软件仿真,掌握C语言的编写程序的方法和思想。
将所学过的本科阶段的相关知识融会贯通,掌握使用Keil μVision 系列软件对单片机程序的编译及调试。
了解电机的工作原理,设计出简易的电机控制系统。
锻炼学生对知识的综合应用能力、对课题相关领域已有知识的查找和自学的能力,以及实际的动手能力。
二、参考文献[1]从宏寿.电子设计自动化:Proteus在电子电路与51单片机中的应用[M].西安电子科技大学出版社,2012.[2]楼然苗,李光飞.单片机课程设计指导.第2版[M].北京航空航天大学出版社,2012.[3]杨新军.步进电机程序控制[J].英才高职论坛.2006,02(1):52—55.[4]王玉琳.一种新型步进电机驱动器[J].机电一体化.2004,10 (4):33—37.[5]彭树生.用PC机控制步进电机的两种方法[J].电子技术[J].1995,2(12).[6]曹航.用微机直接控制的步进驱动系统[J].低压电器.1998 (8).[7]房玉明,杭柏林.基于单片机的步进电机开环控制系统[J].电机与控制应用,2006.33(4):61—64.[8] 伍冯浩,谢陈跃等.Proteus与Keil在单片机开放性实验中的应用[J].电子测量技术.2008.6(31):100—107.[9]江一,朱凌,申仲涛.异步电动机直接转矩控制仿真研究[J].华北电力大学学报.2003 (1):10-13.[10]代启化.Proteus在单片机电路系统设计中的应用[J].自动化与仪器仪表,2006.11(6):84—87.[11] 曹洪奎,马莹莹.基于Proteus单片机系统设计与仿真[J].辽宁工学院学报.2007.6(3):11-15.[12]刘文秀.单片机应用系统仿真的研究[J].现代电子技术.2005.4(8):156—157.[13]Depenbrock M.Direct self-control (DSC)of inverter-fed induction machine[J].IEEE Trans on P E.1988.3 (4):420—429.三、设计(研究)内容和要求(包括设计或研究内容、主要指标与技术参数,并根据课题性质对学生提出具体要求.)步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件。
毕业设计(论文)—基于plc的步进电机控制系统设计
毕业设计(论文)—基于plc的步进电机控制系统设计基于PLC步进电机控制系统摘要:随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是将电脉冲信号变换成机械角位移的一种装置,每个脉冲使转轴步进一个步距角增量,输出角位移与输入脉冲数成正比,转速与输入脉冲成正比,转速与输入脉冲频率成正比。
步进电机的控制方式简单,属于开环控制,且无累积定位误差,有较高的定位精度,而PLC作为一种工业控制微机,是实现电机一体化的有力工具,因此基于PLC的步进电机控制技术已广泛用于数字定位控制中。
本控制系统的设计,由硬件设计和软件设计两部分组成。
其中,硬件设计主要包括步进电机的工作原理、步进电机的驱动电路设计、PLC的输入输出特性、PLC的外围电路设计以及PLC与步进电机的连接与匹配等问题的实现。
软件设计包括主程序以及各个模块的控制程序,最终实现对步进电机转动方向及转动速度的控制。
本系统具有智能性、实用性及可靠性的特点。
关键词:步进电机、PLC、转速控制、方向控制Stepping motor control system based on PLC Abstract:With the development of microelectronics and computer technology, the stepper motor is increasing demanded, which is widely used in printers, electric toys and other consumer products, and CNC machine tools, industrial robots, medical equipment and other electrical machinery products, and is applied in the national economy in various fields. Researching of stepper motor control system to improve the control accuracy and response speed, energy conservation is so important.Stepper motor is a device which will transform electrical pulses into mechanical angular displacement so that Shaft of each pulse to a step angle stepping increment, SO output angular displacement is proportional to the input pulses, speed is proportional to the input pulse speed and speed is proportional to input pulse frequency. Stepper motor control is simple, is open-loop control, and no accumulation of positioning error, a high positioning accuracy,and the PLC as an industrial control computer, is a powerful tool for the integration of the motor, Therefore, the stepper motor control based on PLC technology has been widely used for digital positioning control.The control system consists of hardware and software design of two parts. Among them, the hardware design includes the working principle of stepper motor, stepper motor drive circuit design, PLC input and output characteristics, PLC and PLC external circuit connection with the stepper motor and matching Problem. Software design, including the main program and each module of the control program, ultimately realizes on the stepper motor rotation direction and rotation speed control This system has the intelligence, practicality and reliability features.Keywords: Stepper motor, PLC, speed control, direction control目录1、绪论 (1)1.2问题的提出 (3)1.3设计目的及系统功能 (4)2、PLC控制步进电机系统简介 (5)2.1PLC控制系统 (5)2.1.1 PLC概述 (5)2.1.2 PLC系统的其它设备 (9)2.1.3 PLC的通信联网 (9)2.1.4 PLC控制系统的设计基本原则 (9)2.1.5 PLC软件系统及常用编程语言 (10)2.1.6 PLC的特点 (10)2.1.7 PLC的应用领域 (12)2.1.8 PLC未来展望 (13)2.2步进电机 (13)2.2.1 步进电机概述 (13)2.2.2 步进电机的特性 (14)2.2.3 与直流电机的比较 (14)2.2.4 步进电机的种类 (17)2.2.5 反应式步进电机的控制 (17)2.3本设计所用步进电机 (21)3、硬件电路设计 (23)3.1硬件设计思路 (23)3.2总体设计框图 (23)3.3外围电路设计及分析 (24)3.3.1 键盘控制电路 (24)3.3.2步进电动机驱动电路 (26)2.6.3 LED数码显示电路 (31)3.4步进电机控制系统电路图 (34)4、软件设计 (36)4.1可编程控制器软件设计原理 (36)4.1.1可编程序控制器的工作原理 (36)4.1.2 扫描周期 (37)4.2 PLC的选型 (38)4.2.1 输入输出(I/O)点数的估算 (38)4.2.2 存储器容量的估算 (38)4.2.3 控制功能的选择 (38)4.2.4 机型的选择 (40)4.3FX可编程序控制器简介 (42)2N4.4PLC控制程序设计 (42)4.4.1 PLC控制系统的设计基本原则 (42)4.4.2 PLC编程步骤 (42)4.4.3 PLC提供的编程语言 (42)4.5.1启动停止控制环节 (45)4.5.2 PLC实用驱动电源控制环节 (45)结论 (50)致谢 (51)参考文献 (52)附录 (53)1、绪论1.1技术概述在电气时代的今天,电动机一直在现代化的生产和生活中起着十分重要的作用。
MCS-51单片机电机转速控制及测速显示系统

M C S-51单片机电机转速控制及测速显示系统(总26页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除MCS-51单片机电机转速控制及测速显示系统一、系统总体方案选择与说明本课题要求设计一个单片机电机转速控制系统。
给定信号经A/D转换输入到单片机(MCS-51)并显示,单片机根据给定从D/A 输出相应的信号控制直流电机的转速,并能对电机的转速进行测量。
1.设计要求要求以MCS-51系列单片机为核心设计一个直流电机调速系统,该系统具有显示电动机转速、输入模拟量的功能。
用6位LED 显示。
前两位显示AD,后两位显示输入模拟量,最后两位显示电动机转速,单位为转/s, 电动机最大转速为5000转/min。
其转速由D/A转换的模拟量控制。
2.设计思路1)由地址琐存器74LS273芯片实现动态显示模块,74LS273输出端为段控,用于输出所显示的数值,口位控,控制哪一位LED管亮,LED采用共阴极的接法;2)选用89C51单片机,其内部有4K的寄存器,无需扩展外部存储单元,还具有2个16位定时器/计数器,可以通过CPU 内部定时,进行数据采集;3).ADC0809可将模拟量转换为数字量,并将数字量送单片机;DAC0832可将从单片机输出的数字量转换为模拟量,并用模拟量控制直流电机;4)用霍尔元件测电动机转速。
转速的测量方法有两种:①频率法:利用单片机内部定时器定时(定时时间1秒),再用一计数器对被测脉冲计数,所测脉冲个数即转速值(转/S)②周期法:测量脉冲的周期,即利用定时期累计在被测脉冲的一个周期内机器周期的个数n。
被测信号周期T=n*机器周期,被测信号频率f=1/T。
考虑到要用定时采样的方法,同时又要将两位转速显示出来,所以本设计中采用频率法。
一、系统结构框图与工作原理1.系统结构框图2.工作原理通过调节可变电阻,将模拟量送入AD转换器,经AD转换后通过P0口,将数字量送入单片机,单片机将数字量送I/O,并经74LS273锁存,送数码管显示,同时将数字量送给DA,DA将数字量转换为模拟量,用于控制直流电机的转速。
一种基于PLC的电机转速测量电路设计
毕业设计(论文)论文题目:一种基于PLC的电机转速测量电路设计教学点:指导老师:职称:学生姓名:学号:专业:学校成教院制20 年 1月 12 日题目:一种基于PLC的电机转速测量电路设计任务与要求:工业现场往往存在许多的干扰因素,因此工业测控系统中普遍采用数字式转速测量方法.目前plc因其高可靠性已经成为工业控制的一个重要设备。
采用plc测量电机转速可以保证测量的稳定性和高精度。
时间:2010 年 11 月 10 日至 2011 年 1 月 15 日共 9 周教学点:学生姓名:学号:专业:电气自动化技术指导单位或教研室:电气自动化教研室指导教师: 职称:讲师学校成教院制毕业设计(论文)进度计划表本表作评定学生平时成绩的依据之一。
摘要介绍电机转速测量电路的设计方案,对其软硬件的实现方法进行了介绍,该系统在实际工程应用中,具有较好的稳定性和精度。
转速是电动机重要的基本状态参数,在很多运动系统的测控中,都需要对电机的转速进行测量,测量的精度直接影响系统的控制情况,只有转速的高精度检测才能得到高精度的控制系统。
目前工业中测量转速的方式主要有两种。
一种是将转速转化为模拟信号,对模拟信号进行测量。
如测速发电机是将转速直接转换为电压信号,然后测量其电压。
这种方法的缺点是被测信号易受电磁干扰和温度变化的影响。
另一种是将转速信号转化为脉冲信号,然后用数字系统内部的时钟来对脉冲信号的频率进行测量.这种方法的优点在于抗干扰能力强、不受温度变化影响、稳定性好。
工业现场往往存在许多的干扰因素,因此工业测控系统中普遍采用数字式转速测量方法。
目前plc因其高可靠性已经成为工业控制的一个重要设备。
采用plc测量电机转速可以保证测量的稳定性和高精度。
关键词:PLC、转速测量、稳定性、高精度(基于PLC的电机转速测量电路设计)ABSTRACTThe paper presents a design to measure speed of motor based on PLC,and also introduces the project of the design and implementation method of the software and hardware.This systems applied to engineering and acquires a very good result.Start in the process,if a failure occurred,the protection PLC corresponding action. Start after the completion of "motor on / off indicator light" the electrical normal operation. Running process, PLC followed by motor cycle test whether there has been a phase short circuit,breaking phase,low-voltage, single—phase - to—ground, overload,over—current fault, and so, if occurred, PLC protection action accordingly. Shutdown, PLC received shutdown orders, tripping circuit breakers, "Motor on / off indicator light” eliminate. Fault sound and light alarm at the ”Alarm reset button” reset. This choice is based on the design of the motor PLC fault diagnosis system design。
毕业设计论文基于matlab的步进电机转速控制仿真(论文)

毕业设计论文基于matlab的步进电机转速控制仿真(论文)摘要一般电动机都是连续旋转而步进电动却是一步一步转动的故叫步进电动机每输入一个冲信号该电动机就转过一定的角度有的步进电动机可以直接输出线位移称为直线电动机因此步进电动机是一种把脉冲变为角度位移或直线位移的执行元件数字控制系统的发展步进电动机的应用逐渐扩大仿真环境下建立了步进电机模型不仅仿真结果与实物仿真一致而且其仿真方法简单仿真时间大大缩短是一种理想的步进电机仿真研究方法关键词仿真ABSTRACTGeneral Motors is a continuous rotation while the step is electric rotating step by step so called stepper motors Each input of a red signal the motor will turn a certain angle some stepper motors can be directly output line displacement known as the linear motor Therefore the stepper motor is a pulse into the point of displacement or linear displacement of the implementation of the components With the development of digital control systems stepper motor application gradually expanding Although the stepper motor has been widely used but the stepper motor does not like a normal DC motor AC motor used in the routine It must be double-ring pulsesignal drive circuit composed of control before useUsed in the product forming the beginning of Shang Ruoli simulation software circuit simulation is an important study of its Indispensable want of means to control program simulation environment for debugging not only without actually hardware better Bufen meet the engineering requirements Matlab language is a science and engineering calculations for high-level language which combines scientific computing automatic control signal processing neural networks image processing and other functions into one is an advanced mathematical analysis and computation software can be used as dynamic Modeling and Simulation MATLAB-Simulink simulation environment based on the establishment of a stepping motor under the model simulation results not only consistent with the physical simulation and the simulation method is simple the simulation time is shortened it is an ideal stepping motor simulation methodsKEY WORDS Stepper motor matlab simulation前言步进电机问世以后很快确定了自己的应用场合为开环高分辨率的定位系统工业应用发展到今已有约30年的历史目前还没有更适合的取代它的产品而且已经发展成为除直流和交流电机外的第三大类电动机产品但毕竟发展历史不长人们从应用的角度看仍有不成熟的感觉步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件在非超载的情况下电机的转速停止的位置只取决于脉冲信号的频率和脉冲数而不受负载变化的影响即给电机加一个脉冲信号电机则转过一个步距角这一线性关系的存在加上步进电机只有周期性的误差而无累积误差等特点使得在速度位置等控制领域用步进电机来控制变的非常的简单摘要 1ABSTRACT 2前言 3第1章引言 511步进电机概述 512系统仿真技术概述713仿真软件的发展状况与应用 7第2章 MATLAB概要821 MATLAB概述822 概述10第3章步进电机基本原理 1131 典型结构和工作原理1132 旋转通电方式1233 小步距角步进电机1434 其他型式的步进电动机16com步进电动机1635 步进电机的控制方式21com机的开环控制21com 步进电机的闭环控制22第4章混合式步进数学模型及其建模2341 混合式步进数学模型2342 混合式步进电机的建模 27第5章步进电动机的驱动电源3051混合式步进电机的绕组通电方式305.2 两相双四拍环形分配器32第6章步进电机控制方式仿真结果3561 PID控制器 35comID控制器35参考文献38致谢40第1章引言步进电机最早是在1920年代由英国人所开发1950年代后期晶体管的发明也逐渐应用在步进电机上对于数字化的控制变得更为容易往后经过不断改良使得今日步进电机已广泛运用在需要高定位精度高分解能高响应性信赖性等灵活控制性高的机械系统中在生产过程中要求自动化省人力效率高的机器中我们很容易发现步进电机的踪迹尤其以重视速度位置控制需要精确操作各项指令动作的灵活控制性场合步进电机用得最多11步进电机概述步进电机依其构造上的差异可分为三大类可变磁阻式VR型转子以软铁加工成齿状当定子线圈不加激磁电压时保持转矩为零故其转子惯性小响应性佳但其容许负荷惯性并不大其步进角通常为15°永久磁铁式PM型转子由永久磁铁构成其磁化方向为辐向磁化无激磁时有保持转矩依转子材质区分其步进角有45°90°及75°1125°15°18°等几种混和式HB型转子由轴向磁化的磁铁制成磁极做成复极的形式其乃兼采可变磁阻式步进电机及永久磁铁式步进电机的优点精确度高转矩大步进角度小目前市场上所使用的工业用步进电机以混和式HB型最为普遍步进电机的特征步进电机最大特征即是能够简单的做到高精度的定位控制以5相步进电机为例其定位基本单位分辨率为072°全步级036°半步级是非常小的停止定位精度误差皆在±3分±005°以内且无累计误差故可达到高精度的定位控制步进电机的定位精度是取决于电机本身的机械加工精度置及速度控制步进电机在输入脉冲信号时可以依输入的脉冲数做固定角的回转进而得到灵活的角度控制位置控制并可得到与该脉冲信号周波数频率成比例的回转速度具定位保持力步进电机在停止状态下无脉波信号输入时仍具有激磁保持力故即使不依靠机械式的刹车也能做到停止位置的保持动作灵敏步进电机因为加速性能优越所以可做到瞬时起动停止正反转之快速频繁的定位动作开回路控制不必依赖传感器定位步进电机的控制系统构成简单不需要速度感应器ENCODER转速发电机及位置传感器SENSOR就能以输入的脉波做速度及位置的控制也因其属开回路控制故最适合于短距离高频度高精度之定位控制的场合下使用中低速时具备高转矩步进电机在中低速时具有较大的转矩故能够较同级伺服电机提供更大的扭力输出高信赖性使用步进电机装置与使用离合器减速机及极限开关等其它装置相较步进电机的故障及误动作少所以在检查及保养时也较简单容易小型高功率步进电机体积小扭力大尽管于狭窄的空间内仍可顺利做安装并提供高转矩输出12系统仿真技术概述系统是由客观世界中实体与实体间的相互作用和相互依赖关系构成的具有某种特定功能的有机整体系统的分类方法是多种多样的习惯上依照其应用范围可以将系统分为工程系统和非工程系统工程系统的含义是指由相互关联部件组成的一个整体以实现特定的目的例如电机驱动自动控制系统是由执行部件功率转换部件检测部件所组成用它来完成电机的转速位置和其他参数控制的某个特定目标非工程系统的定义范围很广大至宇宙小至原子只要存在着相互关联相互制约的关系形成一个整体实现某种目的的均可以认为是系统如果想定量地研究系统地行为可以将其本身的特性及内部的相互关系抽象出来构造出系统的模型系统的模型分为物理模型和数学模型由于计算机技术的迅速发展和广泛应用数学模型的应用越来越普遍系统的数学模型是描述系统动态特性的数学表达式用来表示系统运动过程中的各个量的关系是分析设计系统的依据从它所描述系统的运动性质和数学工具来分又可以分为连续系统离散时间系统离散事件系统混杂系统等还可细分为线性非线性定常时变集中参数分布参数确定性随机等子类系统仿真是根据被研究的真实系统的数学模型研究系统性能的一门学科现在尤指利用计算机去研究数学模型行为的方法计算机仿真的基本内容包括系统模型算法计算机程序设计与仿真结果显示分析与验证等环节13仿真软件的发展状况与应用早期的计算机仿真技术大致经历了几个阶段20世纪40年代模拟计算机仿真50年代初数字仿真60年代早期仿真语言的出现等80年代出现的面向对象仿真技术为系统仿真方法注入了活力我国早在50年代就开始研究仿真技术了当时主要用于国防领域以模拟计算机的仿真为主70年代初开始应用数字计算机进行仿真[4]随着数字计算机的普及近20年以来国际国内出现了许多专门用于计算机数字仿真的仿真语言与工具如CSMPACSL SIMNOM MATLAB MatrixSystem Build CSMP-C等第2章 MATLAB概要21 MATLAB概述MATLAB是国际上仿真领域最权威最实用的计算机工具它是MathWork公司于1982年推出的一套高性能的数值计算和可视化数学软件被誉为巨人肩上的工具MATLAB是一种应用于计算技术的高性能语言它将计算可视化和编程结合在一个易于使用的环境中此而将问题解决方案表示成我们所熟悉的数学符号其典型的使用包括数学计算运算法则的推导模型仿真和还原数据分析采集及可视化科技和工程制图开发软件包括图形用户界面的建立MATLAB是一个交互式系统它的基本数据元素是矩阵且不需要指定大小通过它可以解决很多技术计算问题尤其是带有矩阵和矢量公式推导的问题有时还能写入非交互式语言如C和Fortran等MATLAB的名字象征着矩阵库它最初被开发出来是为了方便访问由LINPACK 和EISPAK开发的矩阵软件其代表着艺术级的矩阵计算软件MATLAB在拥有很多用户的同时经历了许多年的发展时期在大学环境中它作为介绍性的教育工具以及在进阶课程中应用于数学工程和科学在工业上它是用于高生产力研究开发分析的工具之一MATLAB的一系列的特殊应用解决方案称为工具箱toolboxes作为用户不可缺少的工具箱它可以使你学习和使用专门技术工具箱包含着M-file集它使MATLAB可延展至解决特殊类的问题在工具箱的范围内可以解决单个过程控制系统神经网络模糊逻辑小波仿真及其他很多问题经过几十年的完善和扩充它已发展成线形代数课程的标准工具在美国MATLAB是大学生和研究生必修的课程之一美国许多大学的实验室都安装有MATLAB供学习和研究之用它集数值分析矩阵运算信号处理和图形显示于一体构成了一个方便的界面友好的用户环境其包含的SIMULINK是用于在MATLAB下建立系统框图和仿真环境的组件其包含有大量的模块集可以很方便的调取各种模块来搭建所构想的试验平台同时SIMULINK还提供时域和频域分析工具能够直接绘制系统的Bode图和Nyquist图MATLAB系统可分为五个部分MATLAB语言这是一种高级矩阵语言其有着控制流程状态功能数据结构输入输出及面向对象编程的特性它既有小型编程的功能快速建立小型可弃程序又有大型编程的功能开发一个完整的大型复杂应用程序MATLAB的工作环境这是一套工具和设备方便用户和编程者使用MATLAB它包含有在你的工作空间进行管理变量及输入和采集数据的设备同时也有开发管理调试 profiling M-files MATLABs applications Bessel功能和快速傅立叶变换MATLAB应用程序编程界面这是一个允许你在MATLAB界面下编写C和Fortran程序的库它方便从MATLAB中调用例程即动态链接使MATLAB成为一个计算器用于读写MAT-files22 概述是用于仿真建模及分析动态系统的一组程序包它支持线形和非线性系统能在连续时间离散时间或两者的复合情况下建模系统也能采用复合速率也就是用不同的部分用不同的速率来采样和更新提供一个图形化用户界面用于建模用鼠标拖拉块状图表即可完成建模在此界面下能像用铅笔在纸上一样画模型相对于以前的仿真需要用语言和程序来表明不同的方程式而言有了极大的进步拥有全面的库如接收器信号源线形及非线形组块和连接器同时也能自己定义和建立自己的块模块有等级之分因此可以由顶层往下的步骤也可以选择从底层往上建模可以在高层上统观系统然后双击模块来观看下一层的模型细节这种途径可以深入了解模型的组织和模块之间的相互作用在定义了一个模型后就可以进行仿真了用综合方法的选择或用的菜单或MATLAB命令窗口的命令键入菜单的独特性便于交互式工作当然命令行对于运行仿真的分支是很有用的使用scopes或其他显示模块就可在模拟运行时看到模拟结果进一步可以改变其中的参数同时可以立即看到结果的改变仿真结果可以放到MATLAB工作空间来做后处理和可视化模型分析工具包括线性化工具和微调工具它们可以从MATLAB命令行直接访问同时还有很多MATLAB的toolboxes中的工具因为MATLAB和是一体的所以可以仿真分析修改模型在两者中的任一环境中进行小结综上所述利用MATLAB来仿真步进电机的运行情况可以帮助研究者更好更方便的了解步进电机的特性以便进一步改善其效率第3章步进电机基本原理31 典型结构和工作原理一般电动机都是连续旋转而步进电动却是一步一步转动的故叫步进电动机每输入一个冲信号该电动机就转过一定的角度有的步进电动机可以直接输出线位移称为直线电动机因此步进电动机是一种把脉冲变为角度位移或直线位移的执行元件步进电动机的转子为多极分布定子上嵌有多相星形连接的控制绕组由专门电源输入电脉冲信号每输入一个脉冲信号步进电动机的转子就前进一步由于输入的是脉冲信号输出的角位移是断续的所以又称为脉冲电动机随着数字控制系统的发展步进电动机的应用将逐渐扩大步进电动机的种类很多按励磁可分为反应式永磁式和感应子式按相数分则可分为单相两相和多相三种其中反应式步进电机用得比较普遍结构也比较简单所以以反应式步进电机为例介绍步进电机的工作原理反应式步进电动机的工作原理与反应式同步电机一样也是利用凸极转子横轴磁阻与直轴磁阻之差所引起的反应转矩而转动的为了便于理解先以一个简单的三相步进电动机为例图 3-1是反应式步进电动机结构示意图它的定子具有均匀分布的六个磁极磁极上绕有绕组两个相对的磁极组成一组联法如图所示图 3-1 三相反应式步进电动机的结构电机转子均匀分布着很多小齿定子齿有三个励磁绕阻其几何轴线依次分别与转子齿轴线错开 013て23て相邻两转子齿轴线间的距离为齿距以て表示即A 与齿1相对齐B与齿2向右错开13てC与齿3向右错开23てA与齿5相对齐A 就是A齿5就是齿132 旋转通电方式图 3-2 三相单三拍运行转子位置步进电动机的工作原理其实就是电磁铁的工作原理定子由若干相控制绕组构成每相依次通入直流电磁通具有力图沿磁阻最小路径通过的特点如A相通电BC相不通电时由于磁场作用齿1和齿3与A A对齐如图3-2a所示如B相通电AC相不通电时齿2应与B对齐此时转子向右移过13て此时齿3与C偏移为13て齿4与A偏移て-13て 23て如图3-2b所示如C相通电AB相不通电齿3应与C对齐此时转子又向右移过13て此时齿4与A偏移为13て对齐如图3-2c所示如A相通电BC相不通电齿4与A对齐转子又向右移过13て这样经过ABCA 分别通电状态齿4即齿1前一齿移到A相电机转子向右转过一个齿距如果不断地按A-B-C-A通电电机就每步每脉冲13て向右旋转如按A-C-B-A通电电机就反转这种按A-B-C-A方式运行的称为三相单三拍运行所谓三相是指步进电动机具有三相定子绕组单是指每次只有一相绕组通电三拍指三次换接为一个循环第四次换接重复第一次情况除了这种运行方式外三相步进电动机还可以以三相六拍和三相双三拍运行三相六拍运行的供电方式是A-AB-B-BC-C-CA-这时每一循环换接6次总共有6种通电状态这6种通电状态中有时只有一相绕组通电如A相有时有两相绕组同时通电如A相和B相图3-3表示这种方式对控制绕组供电时转子位置和磁通分布的图形开始时先单独接通A相这时与单三拍的情况相同转子齿1和3的轴线与定子极轴对齐如图3-3a所示当A和B两相同时通电时转子稳定位置将会停留在AB两定子磁极对称的中心位置上依此类推如果下面继续按照BC-C-CA-A的顺序使绕组换接那末步进电动机就不断按顺时针方向旋转当顺序顺序改为A-AC-C-CB-B-BA-A时步进电动机就反响即按逆时针方向旋转图 3-3 三相六拍运行aA相通电bAB相通电cB相通电dBC相通电可见单双六拍运行时步距角为15°比三拍通电方式时减小一半因此同一台步进电动机采用不同的通电方式可以有不同的拍数对应运行时的步距角也不同此外六拍运行方式每一拍也总有一相控制绕组持续通电也具有电磁阻尼作用电机工作也比较平稳33 小步距角步进电机以上这种结构形式的反应式步进电动机它的步距角较大常常满足不了系统精度的要求所以大多数采用如图3-4所示的定子磁极上带有小齿转子齿数很多的反应式结构其步距角可以做得很小下面进一步说明它的工作原理图3-4所示的是最常见的一种小步距角的三相反应式步进电动机定子每个图3-4 三相反应式步进电动机的结构极面上有5个齿转子上均匀分布40个齿定转子的齿宽和齿距都相同当A相控制绕组通电时转子受到反应转矩的作用使转子齿的轴线和定子AA′极下齿的轴线对齐因转子上共有40个齿其齿距角为定子每个极距所占的齿数为不是整数如图3-5所示因此当定子A相极下定转子齿对齐时定子B相极和C相极下的齿和转子齿依次有 13 齿距的错位即3°同样当A相断电B相控制绕组通电时反应转矩的作用下子按逆时针方向转过3°转子齿的轴线和定子B相极下齿的轴线对齐这时定子C相极和A相极下的齿和转子齿又依次错开 13 齿距依次类推若继续按单三拍的顺序通电转子就按逆时针方向一步一步地转动步距角为3°当然改变通电顺序即按A-C-B-A 电机按顺时针方向反转图3-5转子展开图 A相绕组通电若采用三相单双六拍的通电方式运行时和前面分析的道理完全一样步距角也减小一半为15°通过以上分析可知转子的齿数不能任意选取因为在同一相的几个磁极下定转子齿应同时对齐或同时错开才能使几个磁极的作用相加产生足够的反应转矩所以转子齿数应是定子磁极的偶数倍另外在不同相的磁极下定转子相对位置应依次错开 1m 齿距这样才能在连续改变通电状态下获得连续不断的运动否则当某一相控制绕组通电时转子齿都将处于磁路的磁阻最小的位置上各相绕组轮流通电时转子将一直处于静止状态电动机不能正常运行为此要求两相邻相磁极轴线之间转子的齿数应为整数加或减 1m 即3-1式中K 为正整数Zr 为转子的齿数2p 为一相绕组通电时在圆周上形成的磁极数图 3-5定转子展开图A相绕组通电如果以 N 表示步进电动机运行的拍数则转子经过 N 步将转过一个齿距每转一圈即360°机械角需要走NZr 步步距角为3-2N Cm式中C 为通电状态系数当采用单拍或双拍方式时C 1而采用单双拍方式时C 2由此可见增加拍数和转子的齿数可以减小步距角有利于提高控制精度增加电机的相数可以增加拍数也可以减小步距角但相数越多电源及电机的结构越复杂造价也越高反应式步进电动机一般做到六相个别的也有八相或更多相增加转子的齿数是减小步进电动机步距角的一个有效途径目前所使用的步进电动机转子的齿数一般很多对相同相数的步进电动机既可采用单拍方式也可采用单双拍方式所以同一台电机可有两个步距角如 3°15° 15°075° 12°06°等当通电脉冲的频率为时由于转子每经过 NZr 个脉冲旋转一周故步进电动机每分钟的转速为3-3式中的单位为 HZ可见反应式步进电动机的转速与拍数 N转子齿数 Zr 及脉冲的频率有关当转子齿数一定转速与输入脉冲的频率成正比改变脉冲的频率可以改变电机的转速34 其他型式的步进电动机com步进电动机图3-6是永磁式步进电动机的结构原理图定子为凸极式装有两相或多相绕组转子为凸极式星形磁钢其极对数与定子每相绕组的极对数相同图中定子为两相集中绕组AO BO 每相为两对极所以转子也是两对极即 p 2当定子绕组按 A-B –A - –B -A 的次序轮流通电时转子将按顺时针方向每次转过45°即步距角为45°永磁式步进电动机的步距角3-4用电弧度表示则有3-5式中p 为转子极对数图 3-6 永磁式步进电机由上可知永磁式步进电机要求电源供给正负脉冲否则不能运行这就使电源的线路复杂化了这个问题可通过在同一相的极上绕两套绕向相反的绕组电源只供给正脉冲的方法来解决这样做虽然增加了用铜量和电机尺寸但却简化了对电源的要求此外还有两相双四拍通电方式即AB-B –A - –A –B - –B A-AB永磁式步进电动机的特点是①大步距角例如②启动和运行频率较低通常为几十到几百赫兹但转速不一定低但它所需的③控制功率较小效率高④在断电情况下具有定位转矩⑤有强的内阻力矩主要用于新型自动化仪表com步进电动机混合式步进电动机也称为感应子式步进电动机这是一种十分流行的步进电动机它的定子铁心与反应式步进电动机相同也是两相集中绕组每项为两极对按A-B –A - –B -A次序轮流通以正负脉冲转子的结构与永久磁钢的电磁减速式同步电动机相同它既有反应式步进电动机小步距角的特点又有永磁式步进电动机的高效率绕组电感比较小的特点常常也作为低速同步电动机运行一两相混合式步进电动机的结构图3-7为两相混合式步进电动机的轴向剖视图定子的结构与反应式步进电动机基本相同沿着圆周有若干个凸出的磁极极面上有小齿极身上有控制绕组控制绕组的接线如图3-8所示转子由环形磁钢和两段铁芯组成环形磁钢在转子中部轴向充磁两段铁芯分别装在磁钢的两端转子铁芯上也有小齿两段铁芯上的小齿相互错开半个齿距定转子的齿距和齿宽相同齿数的配合与单段反应式步进电动机相同图3-7混合式步进电动机轴向剖视图图3-8混合式步进电动机轴向剖视图二两相混合式步进电动机的工作原理混合式步进电动机作用在气隙上的磁动势有两个一个是由永久磁钢产生的磁动势另一个是由控制绕组产生的磁动势这两个磁动势有时是相加的有时是相减的视控制绕组中电流方向而定这种步进电动机的特点是混入了永久磁钢的磁动势故称为混合式步进电动机1零电流时工作状态各相控制绕组中没有电流通过这时气隙中的磁动势仅由永久磁钢的磁动势决定如果电机的结构完全对称各个定子磁极下的气隙磁动势将完全相等电动机无电磁转矩因为永磁磁路是轴向的从转子B端到定子的B端轴向到定子的A端转子的A端经磁钢闭合在这个磁路上总的磁导与转子位置无关这一方面由于转子不论处于什么位置每一端的不同极下磁导有的大有的小但总和不变另一方面由于两段转子的齿错开了半个齿距所以即使在一个极的范围内看当B端磁导增大时A端必然减小也使总磁导在转子位置不同时保持不变。
毕业设计-基于C51单片机的步进电机控制系统设计

摘要本设计中首先介绍了步进电机的工作原理、控制特点和运行状态,然后给出了步进电机的单片机控制系统的总体设计方案。
在这个控制系统中,单片机选用AT89C51,其作为控制核心,担负着产生脉冲,发送、接受控制命令等任务;脉冲分配采用硬件方法,由8713接收到单片机的控制信号后产生相应的控制脉冲,避免了软件法在不停地产生脉冲时占用的时间;采用单电压驱动的方法驱动电机带动负载运行;利用键盘、显示专用芯片8279能够以较简单的硬件电路和较少的软件开销实现微型机与键盘和LED显示器接口。
本设计最后详细介绍了硬件部分和软件部分的实现方法。
关键词:单片机;步进电机;速度控制;ZLG7290;显示器AbstractThe design introduces the working principle of stepper motor, control features and operations, and then gives the stepper motor microcontroller control system design programs. In this control system, the SCM selecting AT89C51, the control center of the shoulder produces pulses, sending, receiving control commands and other tasks; pulse distribution method using hardware from the 8713 chip control signals received resulting from the corresponding control pulse, to avoid software method to generate pulses in constant time occupied; adopt a single voltage-driven approach drive motor to drive the load operation; use of keyboard, display 8279 can be dedicated to simple hardware and less software overhead to achieve keyboard and LED display interface. Finally introduce the hardware and software implementation methods in detail.Key words: SCM; stepper motor; speed control;ZLG7290;display;目录摘要 (I)Abstract .................................................... I I 第一章绪论. (1)1.1步进电机概述 (1)1.2课题研究的主要内容 (2)1.2.1研究内容 (2)1.2.2论文安排 (2)第二章步进电机控制系统设计方案 (3)2.1步进电机的系统 (3)2.2步进电机的失步现象 (5)2.3步进电机控制系统的组成 (6)2.4系统的控制过程 (7)第三章步进电机控制系统硬件部分 (9)3.1硬件电路图 (9)3.2采用51系列单片机AT89C51作为控制器 (10)3.2.1 AT89C51的主要性能 (10)3.2.2 AT89C51引脚功能说明 (10)3.3步进电机的驱动电路 (15)3.4 LED显示电路 (16)3.4.1 LED显示器的结构原理 (16)3.4.2 LED显示接口 (18)3.5可编程键盘/显示控制器ZLG7290电路工作原理 (19)3.5.1 ZLG7290概述 (19)3.5.2管脚、引线与功能 (21)3.5.3 ZLG7290键盘、显示接口电路设计 (24)3.6脉冲分配 (26)第四章步进电机控制系统软件部分 (30)4.1定时器中断服务 (30)4.1.1定时器初值 (30)4.1.2定时器中断服务子程序 (31)4.2 速度控制 (31)第五章总结 (35)致谢 (36)参考文献 (37)附录 (38)第一章绪论本章将简要介绍步进电机的发展过程、步进电机在日常生活中的广泛应用、步进电机作为数字控制电动机的主要特点以及本次研究的主要内容和论文安排。
基于单片机的转速测量系统设计
由于 电机在 运 行 的 过程 中 ,转 速 的平 稳 性 很 重 要 ,而且 电机 在生 产 过程 中要 进行 检验 ,其 中转 速就 是个 非 常重要 的参数 ,所 以要 适 时对 电机 的转 速 进 行测 量 ,来检 测 电机 的工作 情 况 ,以及 电机 的质 量 问 题 ,有 效 地反 映 电机 的状况 ,因此转 速测 量是 非 常重 要 的一个 环节 ,具 有 非 常 大 的现 实 意 义 。 因为 现 在 单 片机 的应用 为转 速测 量 提供 了方 便有 效 的解决 方 案 ,所 以智能化 的 电机 转速 测量 应用 非 常广泛 … 。
图 3 (a)转 速信 号处 理 前 Ui波 形 (b)转 速 信 号 处 理 后 uo波 形
2.3 转 速的计 算 电路 转速 的计 算是 由单 片机 完 成 的 ,主 要 用 到单 片
机 的定 时器 和计数 器 。5 1单 片机 的定 时计数 器有 4 钟 工作方 式 ,不 同 的 工 作 方 式 有 不 同 的 工 作 特 点 。 本 次设 计 采 用 方 式 1,即 计 数 寄 存 器 的位 数 是 16 位 ,由 THx和 TLx寄存 器 各提 供 8位 计 数初 值 。方
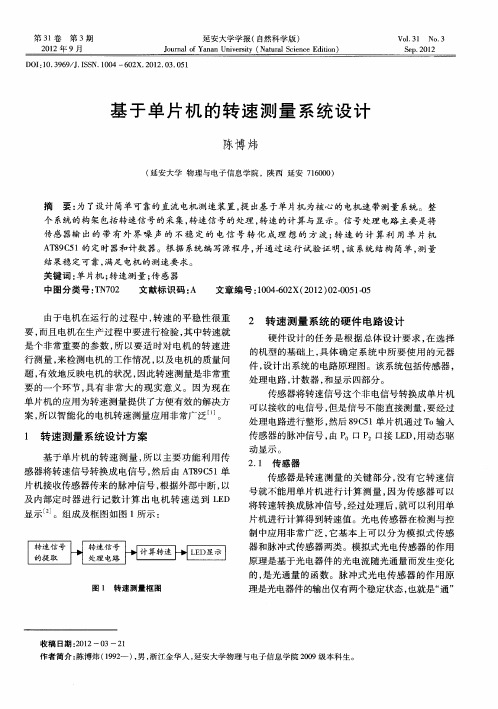
图 1 转 速 测 量 框 图
2 转速测量 系统的硬件 电路设计
硬件 设计 的任 务 是 根 据 总 体 设 计 要 求 ,在 选 择 的机 型 的基 础上 ,具 体 确 定 系统 中所 要 使 用 的 元 器 件 ,设 计 出 系统 的电路 原理 图 。该 系统包 括传 感器 , 处理 电路 ,计 数器 ,和显 示 四部 分 。
第 31卷 第 3期 2012年 9月
延安大学学 报(自然科学版 ) Journal of Yanan University(Natural Science Edition)
电机转速测量系统设计讲解

毕业设计(论文)题目:电机转速测量系统设计院(系)光电工程学院专业测控技术与仪器班级100106班姓名叶亚锋学号100106117导师李党娟2014 年 5 月20 日电机转速测量系统设计西安工业大学光电工程学院叶亚锋摘要:电机是电力系统的主要设备,而电机转速是衡量动力系统正常工作的重要的性能指标,因而需要测量电机转速,使它满足人们的各种需求。
在本设计中多次采用施密特触发器,成为电路的主控芯片,控制着信号的定时和锁純。
用三片CD40110BE级联实现电路的计数、译码、数码管的驱动等功能,通过对光电耦合器产生的脉冲数进行统计,并把所得到的计数脉冲转化为电机的转速值,利用施密特触发器完成数器的清零和锁純,计数器计数译码后将信号输送到数码管,动态的显示脉冲数目,最后根据脉冲数目计算电机的转速。
本设计采用的电子元器件简单普遍,线路连接简单,安装调试容易,测量结果精确,具有较高的实用价值。
关键词:光电耦合器;施密特触发器;计数器;数码显示。
Design of motor speed measurement system Abstract: The motor is the main equipment of power system, and the motor speed is an important performance ind ex to measure the power system normal operation, therefore need to speed measuring motor, make it meet the needs of peopl e. The Schmidt trigger multipl e times in the d esign of main circuit, a control signal timing and l ock the key part of pure. Circuit realization of counting, d ecoding, digital tube driver functions with three slice CD40110BE cascad e, statistics through the pulse number on the photoelectric coupl er, and count the pulses to the motor speed value, compl ete number is cl ear and pure use l ock Schmidt flip-fl op, counter after d ecoding the signal transmitted to the the digital tube dynamic display, pulse number, pulse number according to the cal culated motor speed. El ectronic components used in this d esign simpl e and common, simpl e circuit, easy installation, accurate measurement result, and has higher practical value.Keywords:photoelectric coupler;Schmidt trigger;timer;counter;digital display.目录第一章绪论 (4)1.1课题研究的目的和意义 (4)1.2 转速测量在国内外的研究 (4)1.3电机转速的测量方法 (5)1.3.1测频法“M法” (5)1.3.2测周期法“T法” (6)1.3.3 测频测周法“M/T法” (7)第二章转速测量系统的总体方案 (9)2.1 设计任务 (9)2.2设计思路 (9)2.3原理框图 (9)2.4设计的意义 (9)第三章系统硬件电路的设计 (10)3.1 主控芯片的选择 (10)3.2 硬件电路的实现 (10)3.2.1电源电路 (10)3.2.2电机转速脉冲产生电路 (11)3.2.3计数电路 (14)3.2.4控制电路 (16)3.2.5显示电路设计 (19)第四章电路的焊接与调试 (21)4.1电路连接过程的注意事项 (21)4.2电路的调试 (22)4.3转速测量系统的误差分析 (24)第五章总结与展望 (25)5.1 总结 (25)5.2 展望 (25)致谢 (26)参考文献 (27)附录:电机转速测量系统原理图 (28)第一章绪论1.1课题研究的目的和意义电机是将电能从最初的能源形式转换过来的重要桥梁,又是再将大部分电能转换为机械能的装置,电机在电力工业、工矿企业、农业、交通运输业、国防、科学文化及日常生活等方面都是十分重要的设备,在电力工业中,将机械能转换为电能的发电机以及将电网电压升高或降低的变压器,都是电力系统中的关键设备。
课程设计---直流电动机测速系统设计

专业课程设计题目三直流电动机测速系统设计院系:专业班级:小组成员:指导教师:日期:前言1.题目要求设计题目:直流电动机测速系统设计描述:利用单片机设计直流电机测速系统具体要求: 8051 单片机作为主控制器、利用红外光传感器设计转速测量、检测直流电机速度,并显示。
元件: STC89C52、晶振(12MHz)、小按键、 ST151、数码管以及电阻电容等2.组内分工(1)负责软件及仿真调试:主要由完成(2)负责电路焊接:主要由完成(3)撰写报告:主要由完成3.总体设计方案总体设计方案的硬件部分详细框图如图一所示 :数码管显示按键控制单片机 PWM 电机驱动一、转速测量方法转速是指作圆周运动的物体在单位时间内所转过的圈数,其大小及变化往往意味着机器设备运转的正常与否,因此,转速测量一直是工业领域的一个重要问题。
按照不同的理论方法,先后产生过模拟测速法 (如离心式转速表) 、同步测速法(如机械式或闪光式频闪测速仪) 以及计数测速法。
计数测速法又可分为机械式定时计数法和电子式定时计数法。
本文介绍的采用单片机和光电传感器组成的高精度转速测量系统,其转速测量方法采用的就是电子式定时计数法。
对转速的测量实际上是对转子旋转引起的周期脉冲信号的频率进行测量。
在频率的工程测量中,电子式定时计数测量频率的方法一般有三种:①测频率法:在一定时间间隔t 内,计数被测信号的重复变化次数N ,则被测信号的频率fx 可表示为f x =Nt(1)②测周期法:在被测信号的一个周期内,计数时钟脉冲数m0 ,则被测信号频率fx = fc/ m0 ,其中, fc 为时钟脉冲信号频率。
③多周期测频法:在被测信号m1 个周期内, 计数时钟脉冲数m2 ,从而得到被测信号频率fx ,则fx 可以表示为fx =m1 fcm2, m1 由测量准确度确定。
电子式定时计数法测量频率时, 其测量准确度主要由两项误差来决定: 一项是时基误差 ; 另一项是量化± 1 误差。
单片机控制直流调速系统设计任务书

毕业设计(论文)任务书题目:单片机控制直流调速系统设计系别:机电工程系专业:电气自动化技术年级:姓名:指导教师:日期: 年 12 月 23 日毕业设计(论文)任务书毕业设计(论文)任务书毕业设计(论文)任务书5.本毕业设计(论文)课题工作进度计划:起止日期工作内容201 年12 月 14 日~ 12月17日12月23 日~ 12 月25 日201 年3月 28 日~ 4月29日5月 1 日~5 月 20日下发任务书查阅资料完成论文初稿与开题报告和中期检查完成论文定稿和评阅人评阅表,并验收毕业设计教研室审查意见:负责人:年月日系意见:系主任:年月日任务书填写要求1.毕业设计(论文)任务书由指导教师根据各课题的具体情况填写,经教研室负责人审查、系部领导签字后生效。
此任务书应在毕业设计(论文)开始前一周内填好并发给学生;2.任务书内容按教务处统一设计的电子文档标准格式打印,不得随便涂改或潦草书写,禁止打印在其它纸上后剪贴;3.任务书内填写的内容,必须和学生毕业设计(论文)完成的情况相一致,若有变更,应经过系主任签字同意方可重新填写;4.任务书内有关“系别”、“专业”等名称的填写,应写中文全称,不能写数字代码。
学生的“学号”要写全号,不能只写最后2位或1位数字;5.任务书内“主要参考文献”的填写,应按照国标GB 7714—87《文后参考文献著录规则》的要求书写,不能有随意性;6.有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。
如“2013年4月2日”或“2013-04-02”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要在工程实践中,经常会遇到各种需要测量转速的场合,测量转速的方法分为模拟式和数字式两种。
模拟式采用测速发电机为检测元件,得到的信号是模拟量。
数字式通常采用光电编码器,霍尔元件等为检测元件,得到的信号是脉冲信号。
随着微型计算机的广泛应用,特别是高性能价格比的单片机的出现,转速测量普遍采用以单片机为核心的数字式测量方法。
本文便是运用AT89C51单片机控制的智能化转速测量仪。
电机在运行过程中,需要对其进行监控,转速是一个必不可少的一个参数。
本系统就是对电机转速进行测量,并可以和PC机进行通信,显示电机的转速,并观察电机运行的基本状况。
本设计主要用AT89C51作为控制核心,由霍尔传感器、LED数码显像管、HIN232CPE电平转换、及RS232构成。
详细介绍了单片机的测量转速系统及PC机与单片机之间的串行通讯。
充分发挥了单片机的性能。
本文重点是测量速度并显示在5位LED数码管上。
其优点硬件是电路简单,软件功能完善,测量速度快、精度高、控制系统可靠,性价比较高等特点。
关键字:MSC-51(单片机);转速;传感器AbstractIn the project practice, we will meet each kind to need frequently to survey the rotational speed the situation, the survey rotational speed method divides into the simulation type and the digital two kinds. The simulation type uses measured that the fast generator is the detecting element, obtains the signal simulates the quantity. Digital usually uses the electro-optical encoder, the Hall part and so on is the detecting element, obtains the signal is the signal impulse. Along with microcomputer's widespread application, specially high performance price compared to monolithic integrated circuit's appearance, the tachometric survey uses generally take the monolithic integrated circuit as the core digital measuring technique I graduated from the Design of the issue is control of the intelligent use of SCM speed measuring instrument. The system is the motor speed measurement, and PC and can communicate that the motor speed, and to observe the motor running the basic situation.The main design AT89C51 control as the core, by the Hall sensor, LED digital CRT, HIN232CPE-level conversion, and a RS232. Detailed measurements of the speed of the SCM system and PC and the serial communication between the microcontroller. Give full play to the performance of the SCM. This paper is to measure the speed and displayed in five LED digital pipe.The advantage of a simple hardware and software capabilities improve, measuring speed, high precision and control system reliable, cost-effective and so on.Keyword:MSC-51(One-chip computer);sensor;Tachometer目录摘要 (1)Abstract (2)1 序言 (1)2 系统功能分析 (2)2.1 系统功能概述 (2)2.2 系统要求及主要内容 (2)3 系统总体设计 (4)3.1 硬件电路设计思路 (4)3.2 软件设计思路 (4)4 硬件电路设计 (6)4.1 单片机模块 (6)4.1.1 处理执行元件 (6)4.1.2 时钟电路 (10)4.1.3 复位电路 (11)4.1.4 显示电路 (12)4.2 霍尔传感器简介 (15)4.2.1 霍尔器件概述 (15)4.2.2 霍尔传感器的应用 (16)4.2.3 AH41霍尔开关 (17)4.3 发送模块 (18)5 软件设计 (22)5.1 单片机转速程序设计思路及过程 (22)5.1.1 单片机程序设计思路 (22)5.1.2 单片机转速计算程序 (23)5.1.3 二-十进制转换程序 (24)5.2 程序设计 (27)6 系统调试 (29)6.1 硬件调试 (29)6.2 软件调试 (30)6.3 综合调试 (32)6.4 故障分析与解决方案 (33)6.5 结论与经验 (34)参考文献 (36)致谢 (37)附录 (38)附录1 电路原理图 (38)附录2 元器件清单 (39)1 序言智能化转速测量可以对电机的转速进行测量,电机在运行的过程中,需要对其平稳性进行监测,适时对转速的测量有效地可以反映电机的状况。
本系统主要由传感器,单片机AT89C51构成。
可以对大范围转速进行测量,测量的转速精度高,还可以和PC机时时通信,实现对电机转速的测量。
单片机的英文名称是Micro Controller unit,缩写为MCU,又称为微控制器,它是一种面向控制的大规模集成电路芯片。
它具有功能强、体积小、可靠性高、应用简单灵活,因而使用非常广泛,有力地推动各行业的技术发展和更新换代。
本文首先在第二章绪论介绍了此系统的功能、技术指标以及主要内容等;在第三章论述了总体设计过程,确定了技术指标及器件的选择;第四章着重描述了系统硬件电路设计、硬件设计框图及所使用的各种芯片功能与特性;在第五章中重点剖析了软件设计的过程;最后在第六章中具体论述单片机、电平转换电路、通信的处理及调试。
由于本人水平有限,加之时间仓促,论文中难免会有错误和不足之外,不够理想、许多方面还需要继续完善和改进。
在这里恳请指导老师和各位专家老师批评指正。
在此特别感谢我的指导老师郭顺京老师的大力指导。
2 系统功能分析2.1 系统功能概述功能:系统主要实现功能是:AT89C51单片机接收霍尔传感器传来的脉冲信号,单片机根据外部中断,以及内部定时器进行记数计算出电机转速送到LED显示,同时数据传给PC机,并在PC机屏幕上显示出来。
记录各时段的转速,画出V-T坐标图。
组成及框图:本系统通信部分是单片机经电平转换电路HIN232CP之后,通过串口RS-232发送数据,由PC微机接收,微机部分用Visual Basic软件编写的界面作为PC机部分与单片机进行串口之间通信。
传感器电路、转速测量、LED显示、电平转换电路设计等将在以下章图2-1 系统硬件电路应用:从实用的角度看,评价一个系统实用价值的重要标准,就是这个系统对社会生活和科技观念有多大的贡献。
转速测量系统具有大范围、高精度等优点、测量速度快,这种系统将会有良好的应用。
2.2 系统要求及主要内容将霍尔传感器产生的脉冲信号输出入到单片机的外部中断0口,单片机工作在内部定时器工作方式0,对周期信号进行内部记数,调用计算公式算出转速,调用显示程序显示在LED上,同时通过串口向上位机发送转速数据。
主要内容:(1)单片机部分主要完成电机转速的测量(2)LED部分主要是把转速显示出来,显示范围60-36000r/min (3)发送部分主要是完成电平转换,送RS232向PC发送数据。
(4) PC机部分主要完成将数据显示在界面并描绘出V-T图2.3 系统技术指标系统主要完成以下功能:测量系统:1.设计并制作单片机的转速测量的硬件系统;2.用汇编语言完成转速测量的软件系统;3.要求把转速显示在5位LED上,精度为0.1%;4.能向上位机发送数据;5.用9针RS-232即可;通信部分:1.在微机部分采用Visual Basic编制RS—232通信软件;2.通信软件具有数据接受编辑框;3.通信软件要适时对数据的记录,用时间曲线表示;根据系统要实现的功能以及要求,要实现单片机的转速测量主要是各个模块的设计,定时器记数功能、以及LED驱动、电平转换及PC机之间的通信。
单片机可通过编程控制外围部件,能实现较高的自动化程度。
以它为系统核心的控制模块可实现主从控制,完成预定的任务。
3 系统总体设计3.1 硬件电路设计思路硬件设计的任务是根据总体设计要求,在选择的机型的基础上,具体确定系统中所要使用的元器件,设计出系统的原理框图、电路原理图。
89C51单片机通过INT0输入传感器的脉冲信号,P0口P2口接LED动态显示。
另由于PC系列微机串行口为RS232C标准接口,与输入、输出均为TTL 电平的89C51单片机在接口规范上不一致,因此TTL 电平到RS-232接口电平的转换采用HIN232CP接口芯片,该芯片可以用单电压(+5V)实现RS232接口逻辑“1”(-3V~-15V)和逻辑“0”(+3V~+15V)的电平转换。
转速测量部分的硬件设计思路:本次设计单片机部分的硬件框图如图2-1所示。
图3-1 单片机部分硬件框图具体详细的叙述将在下面的章节中逐一介绍。
3.2 软件设计思路软件需要解决的是定时器0的记数和外部中断0的设定、由于测量的转速范围大,所以低速和高速都要考虑在内,关键在于一个四字节除三字节程序的实现。
显示部分、需要有一个二进制到十进制的转化程序,以及转换成非压缩BCD 的程序后、才能进行调用查表程序送到显示。