ABB机器人机械臂位置整体偏移(含角度)的方法
abb机械臂回机械原点程序

ABB机械臂的回机械原点程序通常需要编写一个特定的程序,用于控制机械臂回到其初始位置。
这个过程通常包括以下步骤:初始化位置:首先,你需要知道机械臂的初始位置。
这通常是通过读取机械臂的当前位置或通过其他方式确定的。
计算目标位置:然后,你需要计算机械臂应该移动到的目标位置。
这通常是通过将初始位置与机械臂的长度或其他参数进行比较来确定的。
移动机械臂:接下来,你需要编写一个程序来控制机械臂移动到目标位置。
这通常是通过发送指令给机械臂的运动控制器来实现的。
校准位置:最后,你需要校准机械臂的位置,以确保它已经准确地回到了原点。
这通常是通过读取机械臂的当前位置并检查它是否与目标
位置匹配来实现的。
需要注意的是,具体的回机械原点程序可能会因机械臂的型号和配置而有所不同。
因此,在编写程序之前,你应该仔细阅读你的机械臂的技术文档和编程指南,以确保你正确地理解了如何控制机械臂并编写适当的程序。
ABB定位器调校步骤
ABB定位器调校步骤ABB定位器调校步骤1.调校步骤2.1接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求。
2.2接通4~20mA输入信号。
(定位器的工作电源取自输入信号)。
2.3检查位置反馈杆的安装角度:2.3.1按住MODE键。
2.3.2并同时点击↑或者↓键,直到操作模式代码1.3显示出来。
2.3.3松开MODE键。
2.3.4使用↑或者↓键操作,使执行器分别运行到两个终端位置,会分别显示终端位置的角度,记录两终端角度2.3.5两个终端位置的反馈杆的安装角度应符合下列推荐角度范围:直行程应用范围在-28°------+28°之内。
角行程应用范围在-57°------+57°之内。
全行程角度应不小于25°2.3.6如果角度不在上述范围之内,将执行器先运行到一个终端位置,松开反馈杆上的连接螺丝,调整反馈杆的安装角度,从显示屏上观察,达到要求角度后紧固连接螺丝,然后操作执行器运行到另一个终端位置,检测角度,如果不符则依上述方法调整。
反复调整两个终端位置的角度直到满足要求为止。
2.4切换至配置功能级2.4.1 同时按住↑或者↓键2.4.2 点击ENTER键2.4.3 等待3秒钟,计数器从3计数到02.4.4↑或者↓键程序自动进入P1._配置栏。
2.5使用↑或者↓键选择定位器安装形式为直行程或角行程角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心,一般角位移为90°,如用于蝶阀,球阀的双气缸执行器直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的角位移小于60°,用于驱动直行程阀门气动执行器。
我厂采用的ABB执行器为直行程安装形式,在参数P1.0里面选择:LINEARC(直行程)2.6启动自动调整程序:2.6.1 按住MODE键。
2.6.2 并同时点击↑键一次或多次,直到显示出“P1.1”。
abb机器人如何做位置偏移
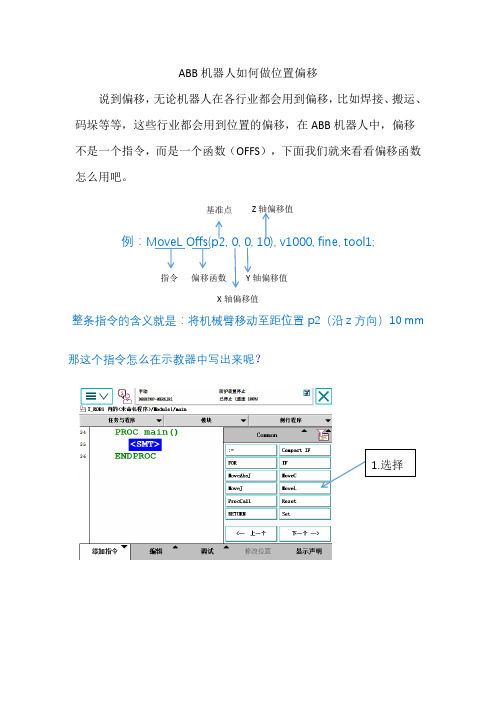
ABB 机器人如何做位置偏移
说到偏移,无论机器人在各行业都会用到偏移,比如焊接、搬运、码垛等等,这些行业都会用到位置的偏移,在ABB 机器人中,偏移不是一个指令,而是一个函数(OFFS ),下面我们就来看看偏移函数怎么用吧。
例:MoveL Offs(p2, 0, 0, 10), v1000, fine, tool1;
基准点
指令
偏移函数
整条指令的含义就是:将机械臂移动至距位置p2(沿z 方向)10 mm 那这个指令怎么在示教器中写出来呢?
1.选择
X 轴偏移值
Y 轴偏移值
Z 轴偏移值
2.双击
3.选择“功能”
4.选择“OFFS”
5.选择“编辑”
6.选择
下面呢,我们以一个画方形轨迹给大家举例说明偏移函数的使用方法:
例:长宽均为300mm 的正方形,P1为示教的位置点(偏移基准点)。
程序:
MoveL p1,v2000,fine, tool1; 7.填入
8.单击
机器人移动P1位置点
P3
P2
P4
MoveL p1,v2000,fine, tool1;。
ABB机器人零点校准方法

ABB零点校准方法ABB零点校准方法1.简介ABB零点校准方法是用于保证在工作中的精确定位和姿态控制的重要过程。
本文档详细介绍了ABB零点校准的步骤和注意事项,以及可能遇到的问题和解决方案。
2.准备工作在进行零点校准之前,需要进行以下准备工作:2.1 确保处于安全状态,所有电源已关闭,臂没有受阻碍。
2.2 检查的机械结构,包括关节、传感器和连接部件,确保其完好无损。
2.3 准备零点校准的工具和材料,如校准板、量角器、螺丝刀等。
3.确定校准点的零点校准需要选择一些准确可靠的校准点。
校准点的选择应尽可能覆盖的工作空间,并考虑到在工作过程中的关键姿态和位置。
4.校准过程4.1 将校准板安装在的末端工具上,并确保其与末端工具的坐标系对齐。
4.2 调整的姿态,使校准板与参考表面平行。
4.3 使用量角器测量校准板的姿态角,并记录下来。
4.4 根据测量结果,调整的关节角度,使校准板与参考表面完全平行。
需要逐个关节进行精确的角度调整,并记录角度变化。
4.5 重复以上步骤,直到所有校准点都完成校准。
5.注意事项及解决方案5.1 在校准过程中,应注意避免与周围物体的碰撞,以免造成损坏。
5.2 如果校准过程中出现姿态角度测量误差过大的情况,可以尝试重新安装校准板或更换量角器进行测量。
5.3 如果关节角度调整后仍然无法达到校准要求,可能是的机械结构出现了问题,建议联系厂商进行修理或调整。
6.附件本文档涉及的附件包括:校准板、量角器、螺丝刀等。
7.法律名词及注释7.1 零点校准:定位和姿态控制的准确性校准过程。
7.2 坐标系:用于描述物体位置和方向的参考系。
7.3 关节角度:关节的角度值,用于控制的运动。
7.4 姿态角:物体的定位和方向的角度值。
ABB机器人操作手册-校准
Robotics Products SE-721 68 Västerås
瑞典
目表
手册概述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 产品文档,M2004 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
© Copyright 2003-2007, 2010-2011 ABB. 保留所有权利。
© Copyright 2003-2007, 2010-2011 ABB. 保留所有权利。
本手册中包含的信息如有变更,恕不另行通知,且不应视为 ABB 的承诺。ABB 对本手 册中可能出现的任何错误概不负责。 除本手册中任何位置有明确陈述之外,本手册中的任何内容都不应视为 ABB 对人员或 财产损失、人身伤害或财产损坏、特定用途的适用性或类似事宜等做出的任何类型的 担保或保证。 ABB 对因使用本手册及其中所述产品而引起的附带或间接损害概不负责。 未经 ABB 书面许可,严禁翻印或复制本手册及其中的任何部分,不得将任何内容透露 给第三方,亦不得用于任何未经授权的用途。违反本条款将会受到起诉。 本手册的额外副本可按时价向 ABB 购买。
下一页继续
5
© Copyright 2003-2007, 2010-2011 ABB. 保留所有权利。
手册概述 续前页
修订版
文档名称
Product manual - IRB 6640 Product manual - IRB 6650S Product manual- IRB 6660 Product manual - IRB 7600 Product manual - IRC5
机器人操作及位置调整

圆弧运动 中间位置 目标位置 运行速度 转弯区数据 工具坐标
数据类型: 数据类型: 数据类型: 数据类型: 数据类型:
robtarget robtarget speeddata zonedata
tooldata
在添加或修改机器人的运动指令之前,一定要确认所使用的工具坐标和工件坐标
运动指令-----MoveJ 关节轴运动
应用:机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运 动路径保持唯一,常用于机器人在空间大范围移动。
MoveJ p1, v100, z10, tPen;
关节轴运动
目标位置
运行速度
转弯区数据
工具坐标
数据类型: robtarget
数据类型: speeddata
数据类型: speeddata
数据类型: zonedata
数据类型: tooldata
在添加或修改机器人的运动指令之前,一定要确认所使用的工具坐标和工件坐标
六、基本指令
数学运算指令 - := 赋值
赋值可以是一个常量或数学表达式
Data
:=
Value;
被赋值的数据 赋值指令
数据被赋予的值
在添加或修改机器人的运动指令之前,一定要确认所使用的工具坐标和工件坐标
更新转数计数器时,没有在位置上更新会导致定位不准确,以致造成伤害
五、转数计数器更新
将机器人1、2、3轴调到本体机械原 点位置
五、转数计数器更新
五、转数计数器更新
五、转数计数器更新
六、基本指令
运动指令-----MoveL 直线运动
应用:机器人以线性移动方式运动至目标点,当前点与目标点两点确定一条直线 ,机器人运动状态可控,运动路径保持唯一,可能出现死点,常用于机器人在工
ABB机器人编程技巧!
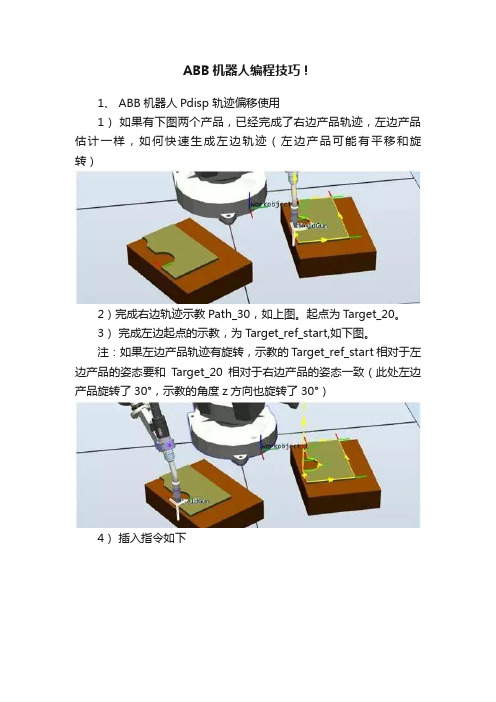
ABB机器人编程技巧!1、 ABB机器人Pdisp 轨迹偏移使用1)如果有下图两个产品,已经完成了右边产品轨迹,左边产品估计一样,如何快速生成左边轨迹(左边产品可能有平移和旋转)2)完成右边轨迹示教Path_30,如上图。
起点为Target_20。
3)完成左边起点的示教,为Target_ref_start,如下图。
注:如果左边产品轨迹有旋转,示教的T arget_ref_start相对于左边产品的姿态要和T arget_20相对于右边产品的姿态一致(此处左边产品旋转了30°,示教的角度z方向也旋转了30°)4)插入指令如下MoveJ pHome,v1000,z100,tWeldGunWObj:=wobj0;//移动到Home位置Path_30;//运行右边产品轨迹MoveJpHome,v1000,z100,tWeldGunWObj:=wobj0;//回到HomeMoveJTarget_ref_start,v1000,fine,tWeldGunWObj:=wobj0;//走到左边产品起点ConfJOff;//因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错 ConfLOff; //因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错PDispOnRot,Target_20,tWeldGun;//设定当前位置和Target_20的偏差关系(包括平移和旋转),因为此时机器人停在Target_ref_start起点,即设定左边轨迹和右边轨迹的整体偏移关系。
使用 ot表示平移和旋转均计算。
如果不使用 ot,则只使用平移,旋转不计算Path_30;//运行原有轨迹,此时轨迹参考坐标移动关系,机器人实际走左边产品轨迹PDispOff;//轨迹完成,关闭平移关系MoveJ pHome,v1000,z100,tWeldGunWObj:=wobj0;2、单工位多次预约程序1)机器人有程序如下:3)工艺过程如下:机器人在home等待。
ABB机械手校准的说明

3. 3.点击此处 点击此处
© ABB University -3
4.点击”是“ 继续
IRC5 Controller Maintenance
进行校准操作
5.点击”全选 “继续 “
6.点击”更新 “继续
7.点击”更新 “
© ABB University -4
IRC5 Controller Maintenance
© ABB University -6
© ABB University -1
校准的说明
IRC5 Controller Maintenance
机器人校准位置
在示教器上进行校准操作之前,请先确认机 器人的六个轴都在标记零点的位置上。
© ABB University -2
IRC5 Controller Maint处 进入画面
输入校准参数的方法
当出现50295、50296或其他与SMB有关的报警时,敬请 检查校准参数,需要时并对其进行修正。
© ABB University -5
IRC5 Controller Maintenance
输入校准参数步骤
2.点击”编辑电机校准偏移” 1.点击”校准 参数” 3.根据机器人的校准 参数进行输入
机器人机械手位置偏差故障分析
机器人机械手位置偏差故障分析
一、机器人机械手在做全自动时候出现了位置偏差导致机器人机械手报警
检查部位和解决措施:
1、看看abb外部工装的固定划线是否有偏移。
2、检查机器人机械手治具能否取出该产品,是否成熟的运用到其他机台。
如果没有需要验证其治具的可行性。
3、检查翻爪翻平、翻直是否机械手维修有定位并且没有间隙晃动,如果没有需拆下翻爪增加定位孔,查找使其晃动的原因,紧固。
4、观察翻爪平面是否与注塑机模具安装面相平。
如果不平需要松掉底座机器人维修螺丝和过渡板螺丝进行校正。
5、检查减速机涨紧套与伺服电机之间是否完全紧固,划线检测是否有偏移。
二、机器人机械手在做嵌件调位置时候,模外、模内对好位置后,回来确认模外位置发现机器人机械手有偏差1~2mm。
检查部位和解决措施:
1、检查减速机涨紧套与伺服电机之间是否紧固,上电后记录机械轴的位置用手推动主臂(如果是引拔方向就推X轴,Y轴就上下拉动)观察机械手位置是否有变化。
2、用手前后、上下晃动主臂看是否间隙,如有间隙检kuka查滑块紧固以及同步带涨紧程度以及相关的机械轮轴等。
3、手动翻平翻直观看翻爪运动情况,如有间隙更换翻边轴承,紧固气缸。
4、用扳手缓慢调节缓冲螺丝,手动翻平翻机械手直检测直到治具运动平稳为止。
ABB定位器调校步骤
ABB定位器调校步骤步骤一:准备工作1.1检查机器人系统和工作环境,确保所有安全措施和防护设备已经启用。
1.2确保机器人和控制系统已经正确连接,并且机器人能够正常工作。
1.3确保机器人上安装的定位器和其他相关设备处于正常状态,并且没有损坏或松动。
步骤二:初始化机器人2.1打开ABB机器人控制系统,并确保机器人系统处于待机状态。
2.2进入ABB机器人控制系统的专用调校程序,并选择定位器调校模式。
步骤三:设置调校参数3.1在调校程序界面上输入相关参数,包括机器人的位置、姿态、姿态姿势和其他调校参数。
3.2根据实际需要设置定位器的精度和灵敏度参数。
步骤四:执行定位器调校4.1调整机器人的姿势和姿势姿势,使其与预定的位置和姿势完全吻合。
4.2通过调整机器人的位置和姿势,进行微调,以便定位器能够准确地读取和显示目标位置和姿势。
4.3对定位器进行校准,以确保机器人在工作时能够准确地定位和执行任务。
步骤五:验证定位器调校结果5.1使用校准后的定位器进行工作,观察机器人是否能够准确地定位和执行任务。
5.2如果发现机器人在工作中出现定位错误或执行不准确的情况,需要重新进行定位器调校。
步骤六:保存调校结果6.1将调校后的参数和数据保存到机器人控制系统的数据库中。
6.2对于多台机器人系统,需要为每台机器人保存独立的调校结果。
步骤七:定期检查和维护7.1定期检查机器人系统和定位器的状态,确保其正常运行。
7.2定期校准定位器,以确保机器人在工作中保持准确的定位和执行能力。
7.3对于长时间未使用的机器人系统,需要重新进行调校和校准,以恢复其准确的定位和执行能力。
总结:以上是ABB定位器调校的详细步骤。
定位器是机器人系统中非常重要的组成部分,能够对机器人的定位和姿态进行准确的测量和控制。
通过对定位器进行调校和校准,可以确保机器人在工作时能够准确地定位和执行任务,提高机器人系统的工作效率和精度。
在进行定位器调校时,需要严格按照操作步骤进行,保证调校的准确性和可靠性。
ABB机器人运动指令之MoveL
ABB机器人运动指令之MoveL线性运动指令在常用的指令集里。
手册对它的解释:MoveL用于将工具中心点沿直线移动至给定目的。
当TCP保持固定时,则该指令亦可用于调整工具方位。
本指令仅可用于主任务T_ROB1,或者如果在MultiMove系统中,则可用于运动任务中。
程序执行将机械臂和外部单元移动至以下目的位置:· 以恒定编程速率,沿直线移动工具的TCP。
· 以相等的间隔,沿路径调整工具方位。
· 以恒定速率执行不协调的外轴,从而使其与机械臂轴同时到达目的点。
如果不可能达到关于调整姿态或外轴的编程速率,则将降低TCP 的速率。
当运动转移至下一段路径时,通常会产生角路径。
如果在区域数据中指定停止点,则仅当机械臂和外轴已达到适当的位置时,方才继续程序执行。
我们对它的理解:直线移动指令,严格按指定的姿态直线移动TCP。
用在对路径要求高的环境,如加工路径。
由于要求高,可能会出现不能到达的报警。
根据手册,我们还可以得出移动过程的三种情况:1.两个控制点TCP一样,姿态不一样,用MoveL则可以实现重定位的姿态调整运动。
2.移动过程中,如果姿态难于调整,则会降低编程速度来实现。
3.两个点如有姿态改变,则会在整个过程中慢慢匀距离改变至最终姿态。
指令格式和内容。
指令的可选变量和关节运动指令一样。
同样使用可选参数后,代替编程参数。
基本示例例 1MoveL p1, v1000, z30, tool2;工具的TCPtool2将直线运动至位置p1,其速度数据为v1000,且区域数据为z30。
例 2MoveL *, v1000\T:=5, fine, grip3;工具的TCPgrip3沿直线移动至储存于指令中的停止点(标记有*)。
完整的运动耗时5秒。
例 3MoveL *, v2000 \V:=2200, z40 \Z:=45, grip3;工具的TCPgrip3沿直线运动至指令中储存的位置。
将数据设置为v2000和z40时,开始运动。
ABB机器人机械臂位置整体偏移(含角度)的方法

VAR num angleyTemp;
VAR num anglezTemp;
posTemp:=offs(pos,x,y,z);
anglexTemp:=EulerZYX(\X,pos.rot)+anglex;
angleyTemp:=EulerZYX(\Y,pos.rot)+angley;
anglezTemp:=lerZYX(\Z,pos.rot)+anglez;
posTemp.rot:=OrientZYX(anglezTemp,angleyTemp,anglexTemp);
RETURN posTemp;
ENDFUNC
PROC Routine1()
MoveL pTest,v1000,z50,tool1;
最近项目上用了ABB机器人,专门研究了一下机械臂位置的角度偏移,使用jointtarget数据类型偏移单个轴使用局限性太大,本例结合EulerZYX、OrientZYX另个指令能对所有个轴进行同时角度偏移,又结合offs偏移指令能对机械臂位置的6个自由度全方位偏移。FUNC robtarget ALLOffs(robtarget pos,num x,num y,num z,num anglex,num angley,num anglez) var robtarget posTemp;
SearchL\Stop,diClampOn,pSearch,ALLOffs(pTest,100,100,1000,90,45,90),v60,tool1; ENDPROC
最近项目上用了abb机器人专门研究了一下机械臂位置的角度偏移使用jointtarget数据类型偏移单个轴使用局限性太大本例结合eulerzyxorientzyx另个指令能对所有个轴进行同时角度偏移又结合offs偏移指令能对机械臂位置的6个自由度全方位偏移
ABB机器人零点校准方法
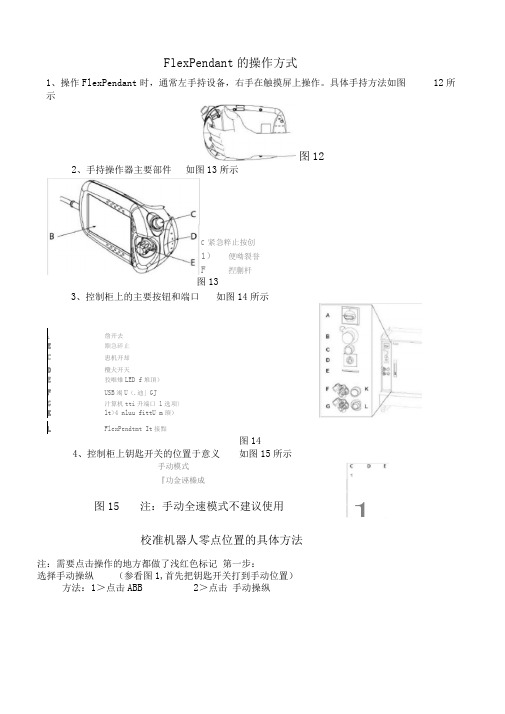
FlexPendant 的操作方式1、操作FlexPendant 时,通常左手持设备,右手在触摸屏上操作。
具体手持方法如图示2、手持操作器主要部件 如图13所示图133、控制柜上的主要按钮和端口 如图14所示手动模式 『功金诬榛成图15 注:手动全速模式不建议使用校准机器人零点位置的具体方法注:需要点击操作的地方都做了浅红色标记 第一步: 选择手动操纵 (参看图1,首先把钥匙开关打到手动位置)方法:1>点击ABB 2>点击 手动操纵12所图12A詹开去E 顒急碎止 C 恵机开却D 欖犬开天E 狡唯雉LED f 堆頂)F USB 竭U (.迪」GJG 汁算机tti 升端口 1选项〉Klt>4 nluu fittU m 頊)LFlexPendtmt It 接黠图144、控制柜上钥匙开关的位置于意义如图15所示1_r-1C 紧急粹止按创1) 便呦裂誉 F 揑蒯杆第二步:选择动作模式 (参看 图2和 图3)方法:1>点击动作模式 2>点击轴1 — 3 或者轴4 — 6 3>点击确定 第三步:选择工具坐标 (参看 图2和 图4)方法:1>点击工具坐标 2>点击tGripper 3>点击确定第四步:选择移动速度 (参看图2和图5)2>点击中 E9・iL L-tt 4 Wk仙 1—血尿--3 畀生虹 t&El>f>er...J-fl :■vbjl...L __掾艸■立:孔.j■・血_|他9 ■IT. K *Hal *E J -L图2图3图1或者小3>点击确定图5方法:1>点击增量 第五步:手动移动机器人各轴到机械零点位置参看图2)方法:此时图2上操纵杆方向处显示操纵杆移动方向于轴的对应关系如果先前选择轴1 - 3则1>操纵杆上下移动为2轴动作 2>操纵杆左右移动为1轴动作3>操纵杆顺/逆时针旋转为3轴动作 如果先前选择轴4 - 6则 1>操纵杆上下移动为5轴动作 2>操纵杆左右移动为4轴动作 3>操纵杆顺/逆时针旋转为6轴动作1>左手持示教器,四指握住示教器使能开关(在示教器下方黑色胶皮里面) 2>右手向唯一一个方向轻轻移动操纵杆,把各轴按顺序移动到各自机械绝对零点移动顺序,依次为6轴-5轴-4轴-3轴-2轴-1轴,否则会使4, 5, 6轴升高以致 于看不到零点位置。
abb修改位置的方法
abb修改位置的方法ABB修改位置的方法一、引言在现代工业生产中,自动化设备的使用越来越广泛。
ABB是一家领先的自动化技术公司,提供了各种各样的自动化设备和解决方案。
在生产过程中,有时候需要对ABB设备进行位置的调整或修改。
本文将介绍一种常见的ABB修改位置的方法。
二、背景ABB设备通常由多个组件组成,这些组件需要按照一定的规则进行布置。
有时候,由于工艺流程的调整或其他原因,需要对设备的位置进行修改。
这时候,我们可以使用ABB的软件来进行位置的调整。
三、步骤1. 连接设备:首先,需要将ABB设备与计算机进行连接。
可以通过串口、以太网或其他通信接口进行连接。
确保设备与计算机之间的通信正常。
2. 打开ABB软件:使用ABB提供的软件打开设备的控制界面。
不同的设备可能有不同的软件,根据具体设备选择相应的软件。
3. 导入设备配置:在软件中导入设备的配置文件。
配置文件包含了设备的参数和布局信息。
通过导入配置文件,可以方便地对设备的位置进行修改。
4. 修改设备位置:在软件中找到设备位置的相关设置,根据需要进行修改。
可以通过拖拽、输入坐标等方式进行位置的调整。
在进行修改之前,需要仔细阅读设备的操作手册,了解各个参数的含义和作用。
5. 保存修改:在完成位置的调整之后,及时保存修改。
可以将修改后的配置文件保存到本地或者上传至设备。
6. 测试设备:修改完成后,需要对设备进行测试,确保设备的功能正常。
可以使用ABB软件提供的测试工具或者其他测试设备进行测试。
7. 调整其他参数:除了位置之外,还可以根据需要调整设备的其他参数。
例如,速度、加速度、灵敏度等参数都可以通过软件进行调整。
8. 更新文档:在完成所有修改和测试之后,需要及时更新相关的文档。
包括设备的位置图、参数表、操作手册等。
这样可以确保后续操作人员能够正确使用设备。
四、注意事项1. 修改设备位置之前,一定要切断设备的电源,确保操作的安全性。
2. 在进行位置调整时,要注意设备之间的相互关系。