美国2013-2038年度无人系统路线图
史上最全美军现役无人机资料
史上最全美军现役无人机资料作为现代战争中的新生力量,无人机已经成为世界各国的研究热点。
各军事强国都在不断挖掘无人机作战应用的新概念、新方法和新领域。
其中,美国是当今世界上无人机系统数量最多、技术最发达的国家,无人机的作战使用经验也最丰富。
尤其在进入21世纪之后,美国先后发布了5版关于无人机的发展路线图,紧跟作战需求的变化和技术的发展,不断修正军用无人机的发展方向。
在美军发布的“2009-2034财年综合无人机系统路线图”中,美国又推出联合能力范围(JCA)的新概念,力图使其无人机的发展研制更贴近未来的作战需求。
自2001年以来,美军已在战场上装备了“猎手”、“大乌鸦”、“影子”、“全球鹰”、“捕食者”等各型无人机系统,主要被用于伊拉克和阿富汗战场。
仅在伊拉克,美国就投入使用了361架无人机。
美军对于无人机的需求正大幅增加,其执行飞行时间已超过50万小时。
这些无人机主要是用于监测、追踪,但现在美军发展的趋势是将无人机越来越多的参与到攻击地面目标(图1)的作战行动中,基本可以做到发现即摧毁。
图1 无人机攻击界面随着作战任务的多样化,未来美军将列装更多型号及用途的无人机,本文主要罗列到目前为止美军列装的主要无人机装备及参数。
图2 MQ-1“捕食者”(Predator)MQ-1“捕食者”(Predator):空军总重:1020Kg有效载荷:200Kg续航时间:>24h/16h (带外挂)最大/巡航速度:220/130Km/h升限:7600m发动机: Rotax 914F功率:115马力传感器:光电/红外、雷神AN/AAS-52、合成孔径雷达、诺斯罗普?格鲁门、AN/ZPQ-1武器:2 枚AGM-114图3 RQ-4“全球鹰”(Global Hawk)RQ-4“全球鹰”(Global Hawk):空军总重:12000Kg有效载荷:890Kg续航时间:32h最大/巡航速度:650/630Km/h升限:19000m发动机: AE-3007E推力:7600 磅力(劳斯莱斯)传感器:光电/红外、合成孔径雷达/移动目标图4 MQ-9“死神”(“捕食者”-B)MQ-9“死神”(“捕食者”B ):空军总重:4700Kg有效载荷:1700Kg续航时间:24h/4-20h (带外挂)最大/巡航速度:425/220Km/h升限:15000m发动机: TPE-331-10Y 功率900轴马力(霍尼韦尔)传感器:光电/红外/激光测距仪/ 激光指示器/合成孔径雷达/移动目标指示器武器:4枚220Kg量级或10枚110Kg量级的弹药图5 RQ-2B “先锋”(Pioneer)RQ-2B“先锋”(Pioneer):海军、海军陆战队总重:190Kg有效载荷:35Kg续航时间:5h最大/巡航速度:200/120Km/h升限:4500m发动机: SF 350,功率26马力传感器:光电/红外,Tamam POP200/300图6 RQ-15“海王星”(Neptun e)RQ-15 “海王星”(Neptune):海军总重:59Kg有效载荷:9Kg续航时间:4h最大/巡航速度:115/110Km/h升限:2400m发动机: 2 冲程发动机功率15马力传感器:光电/红外图7 RQ-5A/MQ-5B “猎人”(Hunter)RQ-5A/MQ-5B“猎人”(Hunter):陆军总重:810Kg有效载荷:90Kg续航时间:18h最大/巡航速度:200/165Km/h升限:12000m发动机:摩托固斯(×2),重油发动机(航空煤油) 功率57 马力×2传感器:光电/红外,Tamam MOSP图8 RQ-7A/B“影子”200(shadow 200)RQ-7A/B“影子”200(Shadow 200):陆军总重:150Kg有效载荷:27Kg续航时间:5h最大/巡航速度:200/130Km/h升限:4300m发动机:AR-741 功率38马力传感器:光电/红外Tamam POP300 Tamam POP 300图9MQ-1C“天空勇士”(sky warrior)MQ-1C“天空勇士”(Sky Warrior)“增程/多用途”(ER/MP)无人机:陆军总重:1450Kg有效载荷:360/220Kg续航时间:40h(110Kg 有效载荷)最大/巡逻速度:240/110Km/h升限:7600m发动机:Thielert 柴油机功率135马力传感器:光电/红外/激光测距仪/ 激光指示器/合成孔径雷达/移动目标指示器(SAR/MTI)武器:AGM-114“海尔法”反坦克导弹/GBU-44/B“蝰蛇打击”激光制导炸弹图10 RQ-8A/B“火力侦察兵”(Fire scout)RQ-8A/B“火力侦察兵”(Fire Sscout):海军、陆军总重:1430Kg有效载荷:270Kg续航时间:>6h最大速度:210Km/h升限:6000m发动机: 250-C20W 功率320轴马力传感器:光电/红外/激光测距仪/激光指示器图11X-47BX-47B:海军、空军总重:21000Kg有效载荷:2000Kg续航时间:9h最大速度:850Km/h升限:12000m发动机: F100-PW-220U Power (SLS) 7600 lb传感器:光电/红外合成孔径雷达/移动目标指示器/电子支援设备武器:炸弹图12 美军列装的微小型无人机目前“网络中心战”和“非接触”作战理论是美军大力发展无人机武器装备的重要依据和理论支撑。
美国无人机系统路线图(2005-2030)中文版(部分)
无人机系统路线图(2005-2030)美国国防部部长办公室二OO五年八月八日(北京高博特广告有限公司组织翻译)编译说明2005年8月,美国国防部在其网站发布了其2000年以来的第三版,也是最新版有关无人机发展的指导性文献《无人机系统路线图2005-2030》。
该文献比较详细、全面地阐述了美国各种用途的无人机研制、作战使用情况,说明了美国对无人机的未来需求、技术实现途径、未来的发展规划和设想。
该文献英文版正文77页,11个附件,共约230页。
为及时了解、掌握国外无人机发展情况,推动我国无人机事业发展,为“尖兵之翼—2006中国无人机大会”提供有价值的参考资料,“尖兵之翼—2006中国无人机大会”组委会委托北京高博特广告有限公司组织军队和地方有关专业人员对该文献进行了翻译。
由于时间紧张只翻译了正文和前3个附录。
考虑到资料的完整性,现将英文版全部附上,供大家参考。
翻译中的不足之处敬请读者批评指正。
有关进一步需求可与北京高博特广告有限公司直接联系。
“尖兵之翼—2006中国无人机大会”组委会 二OO六年九月十六日联系人:孙柏山 电话:88587506-816国防部部长办公室华盛顿特区203012005年8月4日本文件作为一个备忘录,分送给各军事部门领导,包括:空军参谋长、陆军参谋长、海军陆战队司令、海军作战部长、国防预研局局长、国家地面与空间情报局局长。
主题:无人机系统路线图,2005-2030我们批准发布这个版本无人机系统路线图是因为:无人机系统自2001年秋季参与反恐战争以来,在军事作战中的使用迅速扩展。
无人机系统采用新战术、新技术、新方法改变了当前的作战空间,实现了对伊拉克和阿富汗进行的打击支援。
无人机系统不仅可提供持久的情报、监视和侦察能力,还可提供精确和及时的直接火力和间接火力。
作战指挥官需要更多的无人机系统。
我们面临的挑战是快速协调地整合这一技术以支援联合作战。
该路线图的中心目标是指导国防部推动无人机系统任务能力向最紧迫的作战需求实现合理的转移。
无人机发展美国无人机路线图

基本性能
RQ-5A 总重: 总重:730Kg 有效载荷: 有效载荷:90Kg 续航时间: 续航时间:11h 最大/巡航速度: 最大/巡航速度:200/165Km/h 升限: 升限:12000m MQ-5B 总重: 总重:810Kg 有效载荷: 有效载荷:90Kg 续航时间: 续航时间:18h 最大/巡航速度 巡航速度:200/165Km/h 最大 巡航速度 升限: 升限:12000m
美国无人机路线图的主要内容( 二、美国无人机路线图的主要内容(续)
本节将从以下6个部分介绍美国无人机系统的发展现状: 本节将从以下 个部分介绍美国无人机系统的发展现状: 个部分介绍美国无人机系统的发展现状
1.1 1.2 1.3 1.4 1.5 1.6 已列装的无人机系统
前三版路线图框架基本一致 部分: 共6部分: 部分
1.概述 1.概述 2.无人机系统发展现状 2.无人机系统发展现状 3.无人机系统任务需求 3.无人机系统任务需求 4.无人机系统所涉及的主要技术 4.无人机系统所涉及的主要技术 5.无人机系统的作战使用 5.无人机系统的作战使用 6.无人机系统发展路线图 6.无人机系统发展路线图
美国“2007~2032 无人机路线图”
Unmanned System Roadmap 2007~2032
概述( 一、概述(续)
相继推出的四个版本的无人机路线图反映: 相继推出的四个版本的无人机路线图反映:
1 2 3 4 美国对无人机系统的最新认美国无人机路线图的主要内容( 二、美国无人机路线图的主要内容(续)
1.1.2 RQ-4“全球鹰”(Global Hawk) RQ-4“全球鹰 全球鹰” )
1998年2月,“全球鹰”完成首飞,2001年3 月由先进概念技术演示项目转入工程制造与发展阶段。 两种型别:RQ-4A(第10批次飞机)和RQ-4B(第20、30、 40批次飞机)的尺寸和性能有差别。
陆军无人装备作战指挥信息系统

第41卷第1期2020年2月国防科技NATIONAL DEFENSE TECHNOLOGYVol.41,No.1Feb.2020㊀[收稿日期]㊀2019-06-18[作者简介]㊀黄亮,男,博士,高级工程师,研究方向:陆军无人作战体系㊁无人装备指控技术㊂陆军无人装备作战指挥信息系统黄㊀亮,牛耕田,朱㊀峰(中国电子科技集团公司第二十八研究所,江苏㊀南京㊀210007)㊀㊀[摘㊀要]㊀本文对陆战场无人化㊁智能化作战需求及其对指挥信息系统的能力要求进行分析㊂以美军为典型样例对无人装备的指挥信息系统发展现状进行分析,对无人装备作战指挥信息系统体系架构进行构想,并提出未来需重点突破的关键技术,最后对军队无人装备指挥信息体系的发展提出了几点建议㊂[关键词]㊀智能化;无人装备;指挥信息系统[中图分类号]E917㊀㊀[文献标识码]A㊀㊀[文章编号]㊀1671-4547(2020)01-0045-05DOI:10.13943/j.issn 1671-4547.2020.01.12㊀㊀引言随着机器人技术和人工智能的快速发展,智能无人装备越来越成熟,战场智能化㊁无人化成为发展趋势㊂美俄陆战场上无人装备的作战应用取得良好的示范效果,掀起了世界陆战无人装备的发展热潮㊂然而在信息化战争中,任何武器装备要发挥其作战效能都离不开指挥信息体系的支撑,无人装备更是如此㊂如何实现与以人为主的传统作战体系无缝融合,在网络信息体系的支撑下充分发挥无人装备的作战优势,需要对无人装备的指挥信息系统进行积极探索和发展建设㊂一㊁能力需求未来陆战场无人化作战发展趋势,要求指挥信息系统能够对各类无人化作战装备进行体系赋能,通过灵活㊁高效㊁实时的情报处理㊁任务规划㊁行动控制和支援保障,优化各个无人作战任务部队和作战平台的部署㊁计划和行动,使各作战单元和各类资源调配达到最优,扩大侦察监视覆盖范围,提升精确打击效率,增强无人作战体系对抗能力㊂其主要体现在态势感知㊁指挥决策㊁行动控制和综合保障几个领域㊂在态势感知方面,依托空㊁天㊁地㊁网络空间等各域各类型无人侦察探测感知装备,实现对陆战场各类侦察态势信息的接入和处理,具备对人员㊁装甲车㊁坦克和直升机等陆上典型军事目标关联识别和协同侦察探测能力,形成综合态势,具备情报共享能力㊂在指挥决策方面,支撑对有无人作战部队和作战装备进行联合作战筹划,自动生成可按多种优先级排序的作战计划,辅助生成作战行动序列和指令㊂具有协同决策能力,支持目标威胁评估㊁目标价值评估和火力打击分配,实现多平台任务规划和协同控制㊂在行动控制方面,实现战场态势㊁作战行动和保障资源及时掌控,提供复杂环境下的路径规划功能,具备陆战场统一态势的行动监控能力,通过有/无人作战部队和装备间协同框架及协同机制,实现作战行动有效自主协同,提高协同效率㊂在综合保障方面,满足无人装备的保障需求和具有后装保障实力的精细掌控能力,及时掌握各有无人武器装备和保障输送装备的物资㊁油料㊁能量㊁器材损耗和给养等信息㊂结合部队的作战任务主动推送重大气象变化信息,辅助完成网络规划,感知网络信道健康状态,提供优化解㊀国防科技㊀2020年第1期(总第320期)决方案㊂开展测绘㊁气象水文等保障任务,并支撑开展战场管理任务㊂二㊁发展现状在无人装备快速发展的同时,为了融入作战体系,实施精确指挥和控制,世界各军事强国也在发展无人装备的指挥控制系统,其中美军重点规划发展通用无人控制㊁有无人协同和智能指控等技术,为陆军执行 多域战 任务提供足够的灵活性和弹性㊂在‘2011 2036无人系统综合路线图“[2]中,美军给出了支持无人系统的通信网络操作架构(OV-1)㊂在这个架构里,美军将有人系统纳入进来以表明在有人和无人传感器以及其他C2系统之间对通用通信支持架构的需求 对C4系统的支撑架构必须是平台无关的㊂美陆军发布的‘机器人与自主系统战略“明确了未来25年美军为实现RAS能力目标所需的关键技术,包括自主性㊁人工智能以及通用控制,即通过一个通用软件包来控制多个地面和空中系统㊂美国国防部‘2013 2038年无人系统综合路线图“[3]中明确指出,美军的有人/无人协同系统在物理 认知混合环境建模㊁运动中的认知与感知㊁灵活的任务编制㊁任务与角色的理解与共享㊁自学习能力等五个方面存在急需突破的技术障碍,阻遏了有人/无人协同系统的技术进步㊂为解决这一问题,美军提出为实现高效有人/无人协同所要集中完成的工作,包括自适应战术推理㊁理解任务使命㊁自适应感知态势和环境变化㊁报告突发活动㊁自适应移动,适应地形㊁天气㊁障碍,有效交互通信和报告任务相关信息等㊂在最新的路线图文件中[4],美军对无人系统的发展重点强调了体系化作战运用的要求:首先,加快通用/开放体系架构㊁部件模块化及试验鉴定验证等进程,提升无人系统的互用性并促进体系作战的融入;其次,基于人工智能不断发展和增强自主作战能力,提高无人系统作战的效率和效能;再次,加强赛博防御㊁信息保障和电子战防护建设,确保无人系统作战的网络安全;最后,强化建设人机接口㊁人机编队技术,推动支撑人机协同的体系化作战的实现㊂智能指挥控制系统(IC2S)是无人作战系统体系化运用的核心,是完成无人系统作战任务的大脑 ,因此美军对支撑有人/无人协同的智能指挥控制系统的研究不遗余力㊂美军对作战平台智能指挥控制(IC2)的要求为:无人平台自主远距离航行时,在无人控制的情况下自主收集并传送信息,探测㊁评估并主动规避威胁和障碍物;在出现不可预知情况及恶劣水文气象条件下,可根据任务目标㊁周围环境情况和剩余动力迅速做出反应,自主决策返航或与其他平台协作,组成编队以协同完成任务㊂这些均对无人平台自主协同能力提出了较高的要求㊂根据该要求,美军通过军工企业和科研院所的长期研究已取得了一定成就,如未来战斗系统中的机器人设备指挥与控制系统和联合战场空间指挥控制系统㊂(一)机器人设备指挥与控制系统未来战斗系统是一个庞大的系统,它由多个空基和地基机动系统㊁机动支援和保障系统组成,这些系统互联成网㊂机器人设备指挥与控制系统是其重要组成部分,它由美国陆军通信电子研究发展与工程中心指挥与控制管理局负责,其目的在于开发出相关软件,保障由多个无人系统构成的多级系统运行,以便于未来战斗系统的战斗指挥系统能够对无人空中系统和无人地面系统进行编组以及战术控制㊂机器人设备指挥与控制系统的软件共有两类:战术战斗指挥软件和空地协同软件㊂这些软件囊括如信息管理㊁智能机器人㊁辅助决策等先进技术,用于保障无人系统制定和修订作战计划㊂战术战斗指挥软件用于动态监测任务的执行情况,并根据指挥员的意图㊁变化的战场态势㊁部队的资源和能力,为无人空中系统和无人地面系统提供行动方案㊂该软件的功能包括生成无人机飞行路径和无人地面车辆的行驶路径㊁布设无人值守地面传感器㊁分析部队资源㊁分析战斗空间和战场环境㊁生成动态的行动方案,以及对作战计划进行修订㊂空地协同软件设计用来促成无人机和无人地面车辆系统之间的协同,以便提供一个紧密结合的工作流程,进而达成作战任务的目标㊂在执行空地协同任务时,无人机和无人地面车辆相互配合,提供辅助导航㊁更新地形信息㊁探测障碍和64㊀黄亮,等:陆军无人装备作战指挥信息系统报告敌情等㊂空地协同软件也可单独用于无人机或无人地面车辆组成的网络中㊂(二)联合战场空间指挥控制系统联合战场空间指挥控制系统是一款基于网络中心㊁地理空间信息的指控系统,它部署在悍马C2指控车中,可对全系统进行指挥控制㊂系统组成软件包括任务规划推演软件㊁地面无人平台控制软件㊁地形可视化软件㊁视频记录软件㊁路径规划软件以及嵌入式终端中的嵌入式指控软件等㊂联合战场空间指挥控制系统可同时指挥和控制多个无人系统,包括地面无人平台㊁无人艇㊁无人机等㊂可从多种固定无人系统㊁传感器收集数据并对其进行控制,包括武器系统㊁雷达㊁视频系统以及震动探测器等,实现对战场环境进行感知监控和理解识别㊂同时,能够制定作战计划,对异构多无人平台行动任务进行规划和行动任务监控,对无人平台的行动路径进行手动路点导航或智能路径规划,获取传感器探测数据和视频图像信息,并进行人工控制㊂其图形用户接口可根据车辆㊁系统或传感器进行自适应配置,并且各平台㊁节点均适配通用的JAUS 接口㊂除此之外,美军在有人/无人协同指控方面还做了许多关键技术的研发工作,如人机语音交互系统㊁基于多点触控的人机交互㊁基于手势的智能指挥控制系统㊁基于VR /AR (虚拟现实和增强现实)的人机交互控制系统和脑机交互控制技术等㊂通过以上这些系统的研发和实践㊁验证工作,美军逐步建立起了无人平台指挥控制体系,同时推进了有人/无人系统的协同指控关键技术的发展,在实现无人作战系统与C4ISR 系统一体化集成和运用方面做出了许多开创性工作,体现了美军将无人系统融入现有作战体系的思想㊂三㊁体系构想针对未来陆战场无人装备的体系化组织应用和指挥控制能力,本文对无人装备指挥信息系统体系架构进行了初步研究和构想,其组成如图1所示,分为资源层㊁服务层和应用层三个层次㊂图1㊀无人作战装备指挥信息系统组成74㊀国防科技㊀2020年第1期(总第320期)㊀㊀其中,资源层由计算存储㊁通信网络㊁无人平台和传感探测设备等基础设施和硬件资源组成,提供了物理层面的功能㊂服务层由基础软件㊁基础平台和应用功能组成㊂基础软件主要包括操作系统和数据库等;基础平台则在操作系统㊁数据库软件等基础软件基础上,为无人装备指挥控制应用软件提供集成运维㊁数据支撑㊁通用传输㊁报文处理㊁地理图形和安全保密环境,支撑灵活的信息分发与共享㊂应用功能则分为通用无人装备指挥控制应用功能软件和无人平台指控应用功能软件两部分,分别提供指挥控制系统的指挥筹划㊁态势综合㊁行动控制㊁支援保障功能和无人平台的情报处理㊁指令处理㊁任务协同㊁感知识别和载荷管理等能力㊂应用层则包括各类无人装备指挥控制系统,如无人机指挥控制系统㊁地面无人平台指挥控制系统㊁水面/水下无人平台指挥控制系统和通用无人平台联合指挥控制系统等㊂四㊁关键技术美军在最新提出的‘2017 2042年无人系统发展路线图“[5]中,从互用性㊁自主性㊁安全网络和人机协同四个主题分析了无人系统面临的问题和重点发展的关键技术,如表1所示㊂表1㊀美国无人系统2017 2042年四大发展主题及关键支撑技术主题关键支撑技术互用性通用/开放式架构/人工智能框架系统模块化与标准化符合性/测试㊁评估与确认一体化数据传输数据权限自主性人工智能/机器学习提高效率和效能可信自主决策自主武器网络安全赛博攻防与评估信息保障电子战人机协同人机接口与交互人机编队数据收集与处理策略无人装备的体系化作战运用离不开标准化㊁模块化㊁通用化㊁联合化和智能化的作战指挥信息系统,在美军的技术发展认识的基础上,无人装备指挥信息系统还应该重点发展如下关键技术㊂(一)通用联合架构和接口发展未来无人装备分布式作战和集群作战,通过为无人系统定义通用语言/信息传递架构及通用安全通信架构,包括无人系统自主架构㊁无人系统联合控制架构㊁无人系统联合通信架构㊁无人系统指控人机标准化接口,在任务空间或工作领域使用一系列共同标准,以确保有/无人系统间和跨领域的协同㊂(二)多域联合无人作战行动协同在未来多域战条件下,陆军无人化作战行动应精确协同及跨域协同,因此,需要重点开展空地㊁空海㊁空天和陆网等多域无人作战行动精确协同方法与理论㊁多域作战效果增效理论㊁基于多目标的作战协同理论等,为陆军多域联合无人作战行动协同提供指导㊂(三)指挥决策语义理解及多维展现针对无人化作战中可能产生的文本化㊁图形化㊁语音化等多种形式输入的作战指挥决策指令㊁方案计划自动理解和分析的需求,研究基于自然文本理解㊁图像理解㊁语音理解的语义理解和语义分析技术,实现了各类型载体自动整合㊁生成及多维展现,为作战指挥人员提供全方位㊁多手段和更加自然的输入输出手段㊂(四) 云脑+边缘智能+多智能体 信息服务体系面向未来网络化㊁服务化作战体系,研究并实现 云+边+端 智能化协同服务㊁面向智能无人集群的边缘智能服务㊁智能化数据组织和关联㊁用户特征分析与数据信息需求预测㊁多智能体动态组织和分布式协调优化与决策等技术,构建 云边端 一体协同的智能化无人作战信息服务体系㊂五㊁发展建议(一)需求牵引面向新时期陆军多样化的军事使命,以陆军网络信息体系为基础,坚持创新驱动理念,全面梳理㊁深入剖析新时期智能无人装备指挥信息系84㊀黄亮,等:陆军无人装备作战指挥信息系统统能力需求,细致挖掘无人装备指挥信息系统技术发展需求㊂以需求为牵引,为 能打仗㊁打胜仗 的强军目标服务,推动无人作战系统向体系化㊁智能化发展方向演进㊂(二)顶层设计加强无人作战体系顶层规划,推进陆战场无人装备指挥控制技术发展规划及落地建设㊂总体按照国防和军队现代化建设三步走的要求,完善陆战场无人装备指挥控制技术发展规划,形成陆战场无人作战体系发展路线图,突出基于无人装备作战的指挥控制系统智能化建设㊂成体系设计㊁开发㊁评估㊁试用和改进无人装备指挥控制技术,为陆军指挥信息系统智能化㊁无人化建设提供标准规范㊂(三)成果转化广泛借鉴和运用民用领域在无人驾驶㊁人工智能㊁大数据㊁云计算和物联网等成熟度较高的智能化技术与成果,以提升陆军无人装备作战能力为根本目标,成体系㊁成规模地转化用于陆军的无人化作战装备㊂通过边研制㊁边测试㊁边改进的机制,不断发现和解决问题,优化功能设计,验证关键技术,探索应用模式,实现核心技术的突破,为陆战无人装备指控系统的发展奠定基础㊂(四)自主可控无人作战装备指挥控制技术的发展依赖基础核心元器件㊁关键模型算法和基础软件㊂目前无人作战系统中有不少器件或软件采用国外的产品,为避免受制于人,必须加强国产元器件㊁算法和软件平台的发展,持续保持投入,加强无人装备领域基础元器件㊁控制算法和基础软件的研发,缩短与国际先进水平的差距,保障我国无人装备技术发展安全㊂(五)创新管理无人装备指挥控制技术的发展不能闭门造车,而应集中军地相关行业的优势力量,尤其是民用领域在无人化方面的技术专家和团队,对重大的技术难题,采取集智攻关的方式,适时组织国内智能无人科技产㊁学㊁研的力量,分工协作,开展协同创新,加快陆战场无人装备指挥控制技术的发展步伐,节约经费,减小风险,提高水平㊂参考文献[1]㊀黄亮,黄强,刘小毅等.地面无人作战体系及支撑技术发展研究:2018年地面无人系统大会论文集[C].北京:科学技术文献出版社,2018.[2]㊀Unmanned Systems Integrated Roadmap FY2011 2036[R].Department of Defense USA,2011.[3]㊀Unmanned Systems Integrated Roadmap FY2013 2038[R].Department of Defense USA,2013.[4]㊀Unmanned Systems Integrated Roadmap FY2017 2042[R].Department of Defense USA,2017.Research on army operational command informationsystem for unmanned equipmentHUANG Liang,NIU Gengtian,ZHU Feng(The28th Research Institute of China Electronics Technology Group Corporation,Nanjing,210007,China)㊀㊀Abstract:This paper analyzes the operational requirements of unmanned and intelligent battle on land and the capability requirements of command information systems.The development status of command information systems for unmanned equipment are analyzed with the typical example of the US army.The architecture of command information system for unmanned equipment is conceived, and the key breakthroughs in future are put forward.Finally,some suggestions on the development of command information systems for unmanned equipment are made.Key words:intelligence;unmanned equipment;command information systems94。
无人作战系统的通信问题

无人作战系统的通信问题作者:中国科学院院士尹浩来源:《中国军转民》 2020年第12期中国科学院院士尹浩摘要:本文将无人作战平台通信与有人作战平台通信进行对比,指出无人作战平台因缺少人员实时操作,其通信呈现出时效性、可靠性、安全性、设备小型化、平台间组网要求更高,通信链路不对称性更突出等特点;分析了无人机、无人战车、水下无人平台等三类无人作战系统通信的发展现状,并以美军《2013-2038 年无人系统综合路线图》为参考,重点分析了无人作战系统通信未来的发展趋势;强调要重点研究和突破的关键技术是包括通信网络体系结构、信息传输和平台组网等技术的无人作战系统通信网络技术,包括智能化战术协同体系架构设计、网络化有人 /无人协同控制和智能化有人 / 无人协同任务管理等技术的无人作战系统智能化协同传输技术,以及无人作战系统综合防护技术。
20 世纪90 年代以来,在微电子、计算机、导航、通信、动力、自动控制、新材料、人工智能等诸多高新技术的共同推动下,无人作战系统进入了前所未有的蓬勃发展阶段。
各种无人作战平台之间以及与有人系统之间的控制信息和业务信息如何安全可靠传输,如何组网协同工作,面临许多亟待解决的问题,需要突破诸多关键技术。
无人作战系统通信主要完成无人平台任务信息传输和遥控、遥测、跟踪定位等功能。
从覆盖范围来看,无人作战系统通信可分为两类,一类是无人平台的内部通信,另一类是无人平台与地面控制站之间,以及无人平台与其他有人平台的外部通信。
从用途来看,无人作战系统通信又可分为平台任务信息的传输链路(如无人侦察机传输的侦察情报信息链路或无人中继通信飞机的信息转发信道)和对无人平台的控制链路(无人机的遥控、遥测和跟踪定位链路)。
就无人平台本身而言,控制链路显得尤为重要。
对应有人作战平台通信,无人作战平台通信同样面临电磁波传播特性、信道模型等问题,物理层信号设计需要解决的问题完全相同。
比如,空间传输多径影响是相同的,水下无人平台通信同样面临电磁波急剧衰减的挑战。
(完整word版)美国-2038年度无人系统路线图
美国2013—2038年度无人系统路线图4.3 通信系统,频谱以及自主修复性4.3.1 引言所有的无人系统(而非完全自主的系统)主要面临的挑战在于通信链路的可用性、通信链路支持的数据量大小、频谱资源的分配、以及所以射频子系统对抗干扰的能力(如电磁干扰等)。
为满足作战指挥的要求,各服务与机构之间的协同工作能力仍将需要继续改进.国防部无人系统需要对操作控制和任务数据分布进行处理,特别是对非自主的系统。
因此,对于一些公司和大学,这类信息可以通过电缆传输,但对于高度移动的无人操作,用的电磁波信号(EMS)的传播方式将更加容易,或其他方式(例如,声学或光学)。
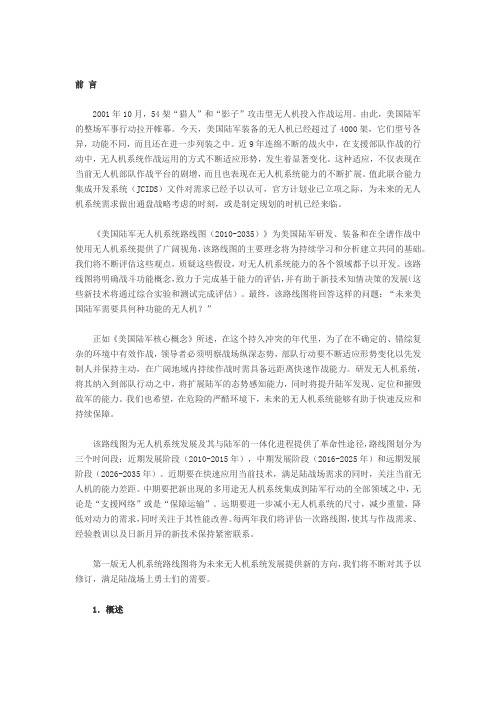
图13显示了支持无人系统所需要的通信网络体系结构(OV-1).该架构中同时考虑了载人系统的设计,说明载人和无人传感器以及其他指挥与控制(C2)系统之间需要共同的通信基础设施支撑。
辅助指挥、控制、通信和计算机(C4)的建设应该是平台无关的(载人或无人)。
运行架构采用了多种环境管理系统的频段,通信网关和中继网站,数据中心和数据传播节点,以及地面广播和网络服务。
在这种体系结构中的通信链路支持无人平台的指挥与控制以及和各自的有效载荷;并且支持将载荷的信息回传,用作战术、战略等意图。
应当尽可能地将载荷任务数据及时驻留在全局数据中心,使世界各地的用户能够快速简便地发现、获取和分析实时和非实时的情报、监视和侦察(ISR)信息和其他任务的数据。
第4。
3.2节到第4.3。
17节着重阐述了无人通信系统结构发展的需求及计划,并针对每个领域给出了适用的标准和系统指导。
图13. 高级辅助指挥、控制、通信和计算机(C4)结构运行概念图4。
3.2 当前无人通信系统存在的问题过去十年内,美国在全球作战应用中操作的经验教训、详细分析研究和回顾、作战任务需求说明等都充分表明了指挥、控制、通信和计算机建设在支持无人平台方面的各种缺陷.具体包括:全球连通性差:无人平台全球发送高带宽数据(例如,全运动视频)至战略战术用户的能力不足。
美国2013-2038年度无人系统路线图

美国2013-2038年度无人系统路线图4.3 通信系统,频谱以及自主修复性4.3.1 引言所有的无人系统(而非完全自主的系统)主要面临的挑战在于通信链路的可用性、通信链路支持的数据量大小、频谱资源的分配、以及所以射频子系统对抗干扰的能力(如电磁干扰等)。
为满足作战指挥的要求,各服务与机构之间的协同工作能力仍将需要继续改进。
国防部无人系统需要对操作控制和任务数据分布进行处理,特别是对非自主的系统。
因此,对于一些公司和大学,这类信息可以通过电缆传输,但对于高度移动的无人操作,用的电磁波信号(EMS)的传播方式将更加容易,或其他方式(例如,声学或光学)。
图13显示了支持无人系统所需要的通信网络体系结构(OV-1)。
该架构中同时考虑了载人系统的设计,说明载人和无人传感器以及其他指挥与控制(C2)系统之间需要共同的通信基础设施支撑。
辅助指挥、控制、通信和计算机(C4)的建设应该是平台无关的(载人或无人)。
运行架构采用了多种环境管理系统的频段,通信网关和中继网站,数据中心和数据传播节点,以及地面广播和网络服务。
在这种体系结构中的通信链路支持无人平台的指挥与控制以及和各自的有效载荷;并且支持将载荷的信息回传,用作战术、战略等意图。
应当尽可能地将载荷任务数据及时驻留在全局数据中心,使世界各地的用户能够快速简便地发现、获取和分析实时和非实时的情报、监视和侦察(ISR)信息和其他任务的数据。
第4.3.2节到第4.3.17节着重阐述了无人通信系统结构发展的需求及计划,并针对每个领域给出了适用的标准和系统指导。
图13. 高级辅助指挥、控制、通信和计算机(C4)结构运行概念图4.3.2 当前无人通信系统存在的问题过去十年内,美国在全球作战应用中操作的经验教训、详细分析研究和回顾、作战任务需求说明等都充分表明了指挥、控制、通信和计算机建设在支持无人平台方面的各种缺陷。
具体包括:全球连通性差:无人平台全球发送高带宽数据(例如,全运动视频)至战略战术用户的能力不足。
解析美军《无人系统综合路线图(2017-2042)》
解析美军《无人系统综合路线图(2017-2042)》作者:王杰东彭中华闫涛来源:《无人机》2018年第12期新版的《无人系统综合路线图(2017-2042)》是美军无人系统未来发展的总体战略指导。
本文分析了新版的发布背景、较前几版的变化、新版的内容及特点,并提出了一些看法。
无人系统是无人机系统(UAS)、无人地面车辆(UGV)和无人海上系统(UMS)的统称。
2018年8月30日,美国国防部发布了最新版的《无人系统综合路线图(2017-2042)》,提出了无人系统愿景,并围绕互操作性、自主性、网络安全、人机协作四个主题,归纳出了14项支撑因素,分析了面临的挑战,明确了未来发展的方向。
新版的背景理2018年以来,美国的《国家安全战略报告》、《国防战略报告》等多份官方文件中,明确将中国和俄罗斯列为头号战略对手,其中,俄罗斯是美国现实的强大军事对手,中国是美国未来的强大军事对手,并指出,美国面临的威胁并非恐怖主义,而是大国竞争,中国已经成为美国最主要的战略竞争对手。
美俄关系持续紧张,在叙利亚问题上,美俄短兵相接,对抗继续进行。
中美贸易摩擦升级,美国加强与台湾的军事联系,美中军事关系降温。
正是在这样的战略背景下,新版的《无人系统综合路线图(2017-2042)》立足美军无人系统的发展现状,聚焦于有人系统和无人系统的高效融合。
新版的变化对比前两版的《无人系统综合路线图(2013-2038)》、《无人系统综合路线图(2011-2036)》,新版本发生了较大的变化。
一是内容更加简洁,新版本只有58页,比前两个版本的168页(2013年版)、108页(2011年版)内容有了较大的缩减。
在篇幅上,新版本仅有6章19节,而2013年版有8章44节,2011年版有11章45节。
二是聚焦有人系统和无人系统的高效整合。
美国防部为在现有的组织架构中更好整合无人系统,实现有人/无人系统的无缝合作,明确提出了国防部无人系统愿景(新版本第一章),归纳了四个关键主题和14项支撑因素(新版本第二、三、四、五章),概括了17项挑战因素、11项未来发展方向和19项关键技术(新版本第六章)。
樊邦奎院士:六大方向,知悉无人机的未来

樊邦奎院士:六大方向,知悉无人机的未来作者:樊邦奎来源:《机器人产业》2017年第01期如果有人问:你认为无人机应该是什么样?你的脑子里会想到什么画面呢。
搭载导弹的军用机?迷你航拍的消费机?喷洒农药的服务机......或许,你想到了更多更多。
我们不得不承认,无人机的诞生正在改变人类社会,这种改变将会越来越明显。
我们迫切地要知道,未来的无人机将会具有怎样的广度。
那么现在,我们就来揭晓这个答案。
无人机的本质是什么?随着信息技术的高速发展,无人机技术发生了巨大的变化。
从遥控飞行器(RPV)到无人驾驶飞机(UAV),再到无人宇宙空间监视(UAS),无人机技术已然迈向了一个新的高度。
美国白宫军事顾问、机器人专家辛格曾经说过,机器人的本质就是机器。
中国工程院院无人机的本质是什么?随着信息技术的高速发展,无人机技术发生了巨大的变化。
从遥控飞行器(RPV)到无人驾驶飞机(UAV),再到无人宇宙空间监视(UAS),无人机技术已然迈向了一个新的高度。
美国白宫军事顾问、机器人专家辛格曾经说过,机器人的本质就是机器。
中国工程院院士、自动化和人工智能专家李德毅也说过,未来汽车的三个功能将是感知、认知和行动。
无人机即是机器,也要具备汽车的三个要素,因此无人机也叫做空中机器人。
空中飞行器具有怎样的发展规律呢?过去,有人机一统天下,下一步,无人机将会对有人机做出重要补充。
未来一段时间,无人机和有人机将会相互依存,协同发展,直到无人机一统天下。
在近几年的局部战争中,无人机的使用品种和架次急剧增加,这引发了全世界研制无人机的热潮。
那么,目前的无人机在往哪个方面发展呢?在这里,我们将从六个方面一览无人机的发展趋势。
无人机的六大发展方向(一)以战场侦查和查打结合为主要目的,大力发展查打和侦查相结合的无人机。
在美国无人机的发展路线图中,无人机被分为小中大和无人作战四种类型,完成的任务也被分为十八种。
其中,侦查、精确目标定位和指示总是排在第一位和第二位。
美国国防部公布无人机系统最新进展

美国国防部公布无人机系统最新进展MQ-1“捕食者”大型无人机RQ-4“全球鹰”大型无人机X-45C无人战斗机2005年8月8日,美国国防部正式发布了最新版无人机路线图--《无人飞行器系统路线图2005~2030》,集中反映和描述了美国对无人机的最新认识、美国无人机系统开发的最新进展、美国对无人机系统的有关需求以及美国无人机系统的未来发展规划。
1新版路线图的主要内容和观点新版路线图长达231页,主要包括绪论、当前无人飞行器系统、需求、技术、使用和路线图六大章,任务、传感器、通信、技术、互操作标准、空域、任务/岗位/程序/使用考虑、可靠性、国土安全、无人地面车辆及生存性11个附录。
1.1绪论描述了新版路线图的制订目的、论述范围、有关定义及为何要发展无人飞行器。
并指出制订路线图的目的,是为了推动2005~2030年间美国军用无人飞行器开发的计划进程,在未来的四年一度防务评审(QDR)中帮助决策者建立有关无人飞行器开发的长期战略,指导工业界开发无人飞行器的有关技术。
绪论提及,美军已将无人飞行器系统视为未来战术兵团的整体构成之一。
例如陆军每支旅级战斗部队现在都有一个负责侦察/监视/目标截获的无人机中队。
绪论还在定义中,叙述了"常被混淆"的巡航导弹和无人飞行器之间的区别:第一,无人飞行器在飞行完毕后可回收,而巡航导弹则不;第二,无人飞行器所载的弹药不需要定制并综合到机身中,而巡航导弹的战斗部则是如此。
在论及为何需要无人机时,路线图指出它可以执行"枯燥的、脏的、危险的"(dull,dirty,dangerous)任务。
在这些任务中人的因素是一个挑战,以前使用有人驾驶飞机虽然也可执行这种任务,但那只是由于相关技术尚未发展成熟。
1.2当前的无人飞行器系统这一章将美国国防部正在进行和已规划的无人飞行器系统项目分为大型无人飞行器系统、概念探索无人飞行器系统(用于开发新的技术或使用概念)、特种作战无人飞行器系统(只装备特种作战司令部)、小型无人飞行器系统(可由1~2人操作的迷你型或微型无人飞行器系统)和无人飞艇(包括浮空器和软式飞艇)五大类,分别进行了简要介绍,并提供了无人飞行器项目数据和世界范围内无人飞行器的增长情况。
无人时代之无人机

美国国防部《2013 年-2038 年无人系统集成路线图》 ——开启“无人”战争时代2013 年 12 月 26 日,美国国防部发布《2013 年-2038 年无人系统集成路线 图》(以下简称《路线图》)。
该《路线图》为空中、陆上和海上无人装备的发 展提出了概略性设想和规划。
目前, 无人机系统已经发展成一支规模庞大的队伍, 美国所拥有的无人机就超过 1 万架。
本文将对一些代表性的无人机进行介绍。
一、现有无人机介绍 数量和种类众多的无人机在多个领域发挥了重要作用,如武器投放、目标指 示、目标服务/检验、心理战/信息战、压制敌方防空力量、情报监视与侦察、攻 击/时敏目标打击、部队防护、反潜战、水面战、扫雷、空战、电子战、海洋数 字地图绘制、通信导航网络节点、SAR 对抗、大规模杀伤/化学/生物武器、海上 基地、海上封锁行动、爆炸武器处理/简易爆炸装置摧毁等。
在伊拉克战争中,美军使用了包括空军的“全球鹰”和“捕食者”,海军陆 战队的“龙眼”和“先锋”,陆军的“猎犬”、“指针”和“影子 200”等十几 种现代无人机,其数量之多,为美军作战史上所罕见。
无人机在伊拉克战争中发 挥的巨大作用引起了各国军方人士的普遍关注。
在阿富汗反恐战争中, 美国正使用越来越多的无人机, 据不完全统计在 2012 年共计发射了 506 次无人飞机,相比较 2011 年的 294 次增加了 72%。
由于无人 机的增加分担了许多美国驻军的任务,大量的美国驻军得以回国。
按照无人机的重量、海拔和速度不同,可以将无人机划分为 5 组,见表 1。
下面对一些代表性的无人机做一些简单介绍。
表 1 无人机系统分组分组 第1组 最大起飞重量;正常 飞行高度;空中速度 代表型号 任务领域<20 磅;<1200 英尺; RQ-11 渡鸦、 黄蜂 (WASP) 、 侦察、目标定位、化学与生物 <100 节 美洲狮(Puma)、RQ-16T 侦查 21~55 磅;<3500 英 尺;<250 节 <1320 磅;<18000 英 尺;<250 节 >1320 磅;<18000 英 尺;任意空速 >1320 磅;>18000 英尺;任意空速 扫描鹰、银狐、航空探测 器 侦察、目标定位、化学与生物 侦查、作战搜索与救援、作战 管理第2组第3组RQ-7 影子、远征无人机、 侦察、目标定位、信号情报、 小型战术无人机、XPV 作战管理、通信/数据中继 捕食者/灰鹰、MQ-5 猎手、 侦察、目标定位、信号情报、 MQ-8B/C 火力侦察、 作战管理、通信/数据中继、电 MQ-1A、A160T 子战、武器化打击 MQ-9 收割者、RQ-4 全球 鹰、MQ-4C 海神、MQ-L、 全球观测者 侦察、 目标定位、 武器化/打击、 信号情报、电子战、信息战、 作战管理、通信/数据中继第4组第5组注:1 英尺=0.3048 米;1 磅=0.45359 千克;1 节=1.852 千米/时。
美国陆军无人机系统2010-2035路线图
前言2001年10月,54架“猎人”和“影子”攻击型无人机投入作战运用。
由此,美国陆军的整场军事行动拉开帷幕。
今天,美国陆军装备的无人机已经超过了4000架,它们型号各异,功能不同,而且还在进一步列装之中。
近9年连绵不断的战火中,在支援部队作战的行动中,无人机系统作战运用的方式不断适应形势,发生着显著变化。
这种适应,不仅表现在当前无人机部队作战平台的剧增,而且也表现在无人机系统能力的不断扩展。
值此联合能力集成开发系统(JCIDS)文件对需求已经予以认可,官方计划业已立项之际,为未来的无人机系统需求做出通盘战略考虑的时刻,或是制定规划的时机已经来临。
《美国陆军无人机系统路线图(2010-2035)》为美国陆军研发、装备和在全谱作战中使用无人机系统提供了广阔视角,该路线图的主要理念将为持续学习和分析建立共同的基础。
我们将不断评估这些观点,质疑这些假设,对无人机系统能力的各个领域都予以开发。
该路线图将明确战斗功能概念,致力于完成基于能力的评估,并有助于新技术知情决策的发展(这些新技术将通过综合实验和测试完成评估)。
最终,该路线图将回答这样的问题:“未来美国陆军需要具何种功能的无人机?”正如《美国陆军核心概念》所述,在这个持久冲突的年代里,为了在不确定的、错综复杂的环境中有效作战,领导者必须明察战场纵深态势,部队行动要不断适应形势变化以先发制人并保持主动,在广阔地域内持续作战时需具备远距离快速作战能力。
研发无人机系统,将其纳入到部队行动之中,将扩展陆军的态势感知能力,同时将提升陆军发现、定位和摧毁敌军的能力。
我们也希望,在危险的严酷环境下,未来的无人机系统能够有助于快速反应和持续保障。
该路线图为无人机系统发展及其与陆军的一体化进程提供了革命性途径,路线图划分为三个时间段:近期发展阶段(2010-2015年),中期发展阶段(2016-2025年)和远期发展阶段(2026-2035年)。
近期要在快速应用当前技术,满足陆战场需求的同时,关注当前无人机的能力差距。
美国海军无人系统作战特点及关键技术分析_闫超

海洋作战环境的复杂性对海军无人系统功能 实现产生诸多挑战。 海上平台的不稳定性对无人 系统的释放回收产生了很大影响; 海上通信基站 数量受限、 水下通信及定位受阻而对通信数据量 以及通信定位方式提出苛刻要求; 远距离长航时 以及在突变的天气条件下执行作战任务对海军无 人系统的能量推进装置产生巨大挑战; 而近海浅 滩地带多为礁石、草丛,这就要求无人地面车能够 在崎岖路面正常运行, 并能够对障碍物进行危险 评估,正确区分探测物或是其他障碍物等。
第 35 卷第 5 期 2014 年 10 月
国防科技 NATIONAL DEFENSE SCIENCE & TECHNOLOGY
Vol.35,No.5 Oct.2014
美国海军无人系统作战特点及关键技术分析
闫 超 1,张志雄 2,罗自荣 1,李 坡 2
(1.国防科技大学机电工程与自动化学院,湖南 长沙 410073;2.国防科技大学军事高科技培训学院,湖南 长沙 410073)
海军无人系统相比其他无人系统具有不同的 作战特点。 因而要形成强大的战斗力,必须拥有与 之适应的核心关键技术作为支撑。
三、美国海军无人系统关键技术分析
美国海军借鉴了其他领域的先进技术和手 段, 用于发展自身无人系统。 与此同时引进在陆 军、 空军成熟使用的无人地面车及无人机进行再 度开发改装,减少了研发成本。 美国海军无人系统 的关键技术主要包括以下几个方面:协同化技术、 自动化技术、结构模块化技术、通信技术、导航与 路径规划技术、能量及推进技术、传感器技术以及 释放回收技术等。 下面结合美国海军无人系统的 应用情况以及发展现状对其关键技术及发展趋势
八释放回收技术海军无人作战系统不同于地面无人系统在很多情况下需要在海上动态释放无人系统因此只有拥有成熟的释放回收技术才能够使无人系统美国海军无人系统近期关键技术发展关键技术能力实例研发单位协同化通用操作系统cos统一全部无人作战框架提出能够提供未来系统dappa和美国海军2013技术模块化接口并获得传感器等载荷的情报数据自主化技术提出远程控制主计划无人空中系统控制部分实现与现有平台结合运行美国海军研究局2013可靠号uuv完成500公里路线自主规划航行美国海军究实验室2013模块化可靠号uuv采用能够轻松实现功能载荷增减的模块化设计方案美国海军究实验室2013terramax无人地面车采用模块化组建能够集成于现有车辆美国海军陆战队2012年底通信技术广域海上监视项目建立了海上100海里范围内每秒76兆传输速度的秘密下行链路美国海军2008随距离增加切换海上空陆指挥站到卫星控制系统美国国防部承包商2012导航与可靠号uuv采用光纤陀螺惯性导航技术并通过gps美国海军研究2013路径规划多普勒速度仪进行补充校正实验室技术海军全球鹰无人机采用激光陀螺捷联式惯导系统美国海军2012能量推进宣布大排量无人潜航器lduuv计划研究混合固态氧化物燃料电池美国海军研究局2013年底技术研制出能量利用率高的使用柴油发动机的无人水面艇能够连续运行72小时美国海军2012传感器在广域海上监视项目中采用合成孔径雷达能够完成每小时美国海军2015年形成技术9000平方公里的海面面积的监视任务作战能力释放x47b在航母上成功着落可根据指令钩住两根不同的拦阻索美国海军2013回收技术测试了通用发射与回收模块实现通信浮标和潜航器的发射管回收美国海军预计2015年测试超等
从无人系统综合路线图综合研判美国无人系统发展态势

从无人系统综合路线图综合研判美国无人系统发展态势作者:张洋来源:《无人机》2018年第09期美军最新发布了无人系统路线图,综合美军无人系统发展规则研判,美军无人系统发展正在进入以高效提升谱系能力、全面推进概念技术融合、逐步推动装备更新拓展为重点的新时期。
2018年8月30日,美国防部发布《2017 - 2042年无人系统综合路线图》(下称《综合路线图》),这是美军公开发布的第5版(2007、2009、2011、2013、2017)《综合路线图》,结构安排和主要内容发生较大变化,一定程度上反映了美军关于未来无人系统发展的新认知、新安排,但其内容不足以帮助我们预判美军未来无人系统发展态势。
综合新版《综合路线图》的内容和近年来的发展动向,我们研判:美军无人系统发展正在进入以高效提升谱系能力、全面推进概念技术融合、逐步推动装备更新拓展为重点的新时期,我须密切持续关注,及早部署应对。
《综合路线图》的结构安排和主要内容发生较大变化新版《综合路线图》围绕全局主题安排核心内容,主要内容在三个方面发生了较大变化。
围绕四个“全局主题”设计并阐释路线图新版《综合路线图》抛弃了早期版的结构安排,首先直接提出互用性、自主性、安全的网络、人机合作4个事关军用无人系统发展的“全局主题”,再围绕这些主题,分别梳理若干支撑因素并形成路线图,此外还梳理了相关挑战、未来方向和关键技术。
新版《综合路线图》针对互用性主题梳理出5项支撑因素:通用/开放式体系结构;模块化和零件互换性;合规性/试验、鉴定、验证和确认;数据传输集成;数据权限。
针对自主性主题梳理出4项支撑因素:人工智能和机器学习;提高效率和效能;信任;武器化。
针对安全的网络主题梳理出3项支撑因素:网络行动;信息保障;频谱/电子战。
针对人机合作主题梳理出3项支撑因素:人机接口;人机编队;数据策略。
然后,围绕每个主题的各项支撑因素设计了涵盖近期、中期(2029年前后)和远期(2042年前)的路线图。
国防科技动态近程探测技术室-南京理工大学

内部总第238期 4南京理工大学图书馆二零一四年四月二十五日美国防部发布无人系统综合路线图2013年12月23日,美国陆、海、空三军推动国防部发布了《2013-2038财年无人系统综合路线图》,它是继《2011-2036财年无人系统综合路线图》之后的第二版,内容涉及空中、地面和海上(包括水面/水下)三大领域的无人系统,路线图从战略和预算两方面考虑,在国防部层面提出了未来25年无人系统研发、生产、测试、训练、使用以及维修的愿景和战略。
此外,随着无人系统作战应用和采购数量不断增加,该路线图也将对无人系统的采购、成本效率等方面产生重要影响。
《2013-2038财年无人系统综合路线图》重点内容涉及无人系统的互操作性与模块化、通信系统/频谱/阻抗、安全(研究与情报/技术防御)、持久性与恢复力、自主与认知行为、武器、空投传感器、气候感知以及高性能运算等九方面内容,并对其中六个方面进行了详细阐述:1、互操作性与模块化。
从系统功能、创新计划和关键技术三个方面入手,指出其关键技术主要包括中间设备、多信息捕获与处理、盟军任务规划和通用有效载荷适配器。
2、通信系统/频谱/阻抗。
分别从当前无人系统通信架构存在的问题、通信网关和继电器、企业数据中心和分布节点、卫星通信、网络架构与系统、天线、收发系统、水面/水下无人系统通信、频谱、波形、多重输入/输出系统、电磁环境效应、光通信、先进导航系统、GPS操作升级、成本效应、未来趋势以及机动技术等方面,对无人系统通信进行了全面分析。
3、安全(研究与情报/技术防御)。
从静态数据加密、成本效益、统一密级指南、云计算与多层安全等方面对无人系统安全性提出了指导性意见,以实现近期、中期和远期目标。
4、持久性与恢复力。
从尺寸、重量、功率与冷却、可靠性/可用性/可维修性、生存力、结构与材料老化、动力等方面详述了影响持久性与恢复力的因素及改进措施。
5、自主与认知行为。
分近期(2013-2017年)、中期(2017-2020年)和远期(2020年以后)三个阶段对无人系统的自主与认知行为能力进行了规划。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
美国2013-2038年度无人系统路线图4.3 通信系统,频谱以及自主修复性4.3.1 引言所有的无人系统(而非完全自主的系统)主要面临的挑战在于通信链路的可用性、通信链路支持的数据量大小、频谱资源的分配、以及所以射频子系统对抗干扰的能力(如电磁干扰等)。
为满足作战指挥的要求,各服务与机构之间的协同工作能力仍将需要继续改进。
国防部无人系统需要对操作控制和任务数据分布进行处理,特别是对非自主的系统。
因此,对于一些公司和大学,这类信息可以通过电缆传输,但对于高度移动的无人操作,用的电磁波信号(EMS)的传播方式将更加容易,或其他方式(例如,声学或光学)。
图13显示了支持无人系统所需要的通信网络体系结构(OV-1)。
该架构中同时考虑了载人系统的设计,说明载人和无人传感器以及其他指挥与控制(C2)系统之间需要共同的通信基础设施支撑。
辅助指挥、控制、通信和计算机(C4)的建设应该是平台无关的(载人或无人)。
运行架构采用了多种环境管理系统的频段,通信网关和中继网站,数据中心和数据传播节点,以及地面广播和网络服务。
在这种体系结构中的通信链路支持无人平台的指挥与控制以及和各自的有效载荷;并且支持将载荷的信息回传,用作战术、战略等意图。
应当尽可能地将载荷任务数据及时驻留在全局数据中心,使世界各地的用户能够快速简便地发现、获取和分析实时和非实时的情报、监视和侦察(ISR)信息和其他任务的数据。
第4.3.2节到第4.3.17节着重阐述了无人通信系统结构发展的需求及计划,并针对每个领域给出了适用的标准和系统指导。
图13. 高级辅助指挥、控制、通信和计算机(C4)结构运行概念图4.3.2 当前无人通信系统存在的问题过去十年内,美国在全球作战应用中操作的经验教训、详细分析研究和回顾、作战任务需求说明等都充分表明了指挥、控制、通信和计算机建设在支持无人平台方面的各种缺陷。
具体包括:全球连通性差:无人平台全球发送高带宽数据(例如,全运动视频)至战略战术用户的能力不足。
目前无人驾驶的基础设施大部分集中在中东,无法支持全球其他地区的行动。
昂贵的卫星/网络合同:每个系统的卫星通信带宽的多是单独购买通过商业租赁。
许多系统还依赖于单独的平台为中心的地面网络基础设施,以提供与战术,运营和战略消费者的连接。
由于这种连接通常由租用商业网络提供,每个系统的开销成本进一步增加。
非模式化的基础设施:许多无人机系统程序建立供应商专有的通信解决方案,包括网站通信和接入地面网络基础设施。
这种方法防止跨平台的资源共享,大大增加了基础设施的开销成本(例如,设施,项目管理),并抑制系统的互操作性。
信息共享性差:许多系统采用专用的处理、利用和分发(PED)和任务数据基础设施,以防止系统、服务和组织之间的有效的数据共享。
总之,目前的无人系统的通信基础设施是容易产生冗余浪费,缺乏互操作,并抑制了系统数据向潜在用户的分发。
为了更好地找到解决未来无人系统操作所面临的挑战的最佳途径,需要做出几个关键的假设:项目资源将变得有限:OCO经费一直维持近几年无人机系统大部分的运作成本。
在未来数年内,这一资金将消失。
没有项目资源,有限的租赁C4基础设施将萎缩。
C4基础设施的需求在增长:操作环境将发生改变:开放标准提高互操作性:平台无关提高效率:4.3.3 通信网关和中继站点美国国防部和商业网关提供军事和非军事的卫星和国防信息系统网(DISN)运输和互联网协议(IP)网络中心服务。
因此,能够提供任务数据的全球发送,使得无人系统的远程指挥与控制成为可能。
同样,中继站点通过连接视距(LOS)与超视距无线系统将任务数据传输和指挥与控制与DISN进行连接。
现有的许多平台为中心的专用网关可用以支持在中东地区的业务。
为了减少网关的长期支出,并更有效地处理来自无人系统信息,国防部将过渡到利用现有的全球卫星通信企业网关设备与平台无关的网关(如瞬移标准的战术进入点(STEP)网站)。
现有的企业网关可以提供通用、安全的设施以及地面空间集中管理、电源、供暖、通风和空调(HV AC)等。
因此,能减少各无人系统项目办公室之间重复工作。
4.3.4 企业数据中心和分发节点为了降低成本,优化人力资源需求,提高各服务、组织和联盟伙伴之间的数据共享,无人系统数据应整合到云计算的企业数据中心,建立一个标准的基础设施,以分发数据到所有授权的用户。
为实现这一目标,近期需要做的包括,情报系统的“大数据”云计算;以及通过建立国防信息系统机构(DISA)的统一视频传播服务(UVDS)将全动态视频图像的数据实时发送至全球各地的用户。
参见图14。
UVDS安装在DISA国防企业计算中心,支持各种FMV来源和用户提供的黑色(加密)和红色(未加密)FMV流,通过多点传送流和近实时的网络流。
UVDS实现国防部和工业标准、协议、配置文件(例如,SD,HD,MPEG-2,H.264,Flash)保证最大程度的互操作性存在的系统,同时利用现有的计算基础设施和国防部的全球信息栅格(GIG)与陆地连接。
强大的路由架构能够连接美国大陆和在美国大陆以外的位置,并且利用国防部网关来高效实时地通过卫星通信网络传播影像(例如,GBS,通过卫星信道返回联合IP调制解调器,中央指挥部数字视频广播)。
UVDS能够代替捕食者和收割者中专用的点对点通信线路。
参见图15。
图14 国防信息系统机构所提的UVDS功能架构图15 当前的UVDS运行架构(2012年2月)4.3.5 卫星通信目前无人系统架构的一个显着的成本是通过商业租赁的卫星带宽的采购。
大部分用于支持部署的无人驾驶系统任务的带宽都是单独采购的。
通过整合商业卫星租赁在多个无人机系统,国防部能在未来降低成本。
为实现该目的,可以通过DISA商业卫星组合研究未来租赁安排,利用未来comsatcom服务获取(FCSA)合同结构。
使用一个共同的基础设施,包括兼容的波形,将使卫星带宽共享成为可能,并可以降低总需求,使之低于每个系统的各个要求的总和。
除了高效的商业租赁,卫星带宽的整体成本可以通过利用更多的美国国防部的卫星通信资源进一步减少。
宽带全球卫星(WGS)可用于与国防部企业网关连接,来降低商用转发器中的无人系统数据流量。
但目前该战略是不可行的,无人平台上缺乏Ka波段的终端。
所有要求超视距连接的无人系统项目必须计划建立Ka波段的终端,从而利用军事卫星通信资源和避免昂贵的年度商业租赁。
超视距无人系统应当尽可能同时考虑商业和军事卫星频段,进而获得操作的灵活性和使用国防部资源。
4.3.6 网络结构与系统无人系统计划应当尽可能地利用DISN核心网作为其全球连接的地面网络基础设施。
DISN核心网的连接点已经可以在国防部的站点获得。
另外,国防信息系统局仍在对DISN核心网进行开发,企业广域网IP服务可用作无人系统中继解决方案的补充。
企业网关的IP网络组件提供了多重安全访问DISN的路由和加解密方案。
4.3.7 天线高速移动系统之间的通信需要高增益、坚固耐用、成本较低的多指向天线。
较大的无人机系统也可以使用聚焦的波束来与更远距离的系统实现连接。
相控阵天线和智能天线(包括组合来自多个天线的信号)的发展可以为传统的抛物面天线提供一个代替方案,但它们需要在大小、质量、功耗以及造价方面进行权衡。
国防部和工业部门也应当继续发展多聚焦(多波束)和过冷的天线系统等技术。
未来天线系统必须能够在很宽的频率范围内接收信号。
但同时也必须具有频率选择性(见 4.3.13)。
因此,相控阵是一种可行的方法。
动态控制(例如,干扰陷零)的阵列系统(9阵元)目前已经可用。
但更多阵元数目的与运载设备表面一致的共形阵列仍处于研发阶段(计划到2020年)。
共孔径利用则要求研发新的干扰抑制方法,从而最大限度地减少相同站点的干扰效应,并提高相邻频段内同时发送/接收操作的潜力。
4.3.8 发射机/接收机系统未来的发射/接收系统需要改进的互操作性、自恢复性、效率和操作的灵活性。
未来的超视距收发器应该尽可能支持商业Ku波段和军用Ka波段的连接。
海军的Triton和陆军的“灰鹰”等项目已经在朝这个方向努力。
这样的硬件结构将最大化各类操作环境下的灵活性,并提高在对抗环境下的系统自恢复性能。
无人传感器平台利用多波段终端的挑战往往不是技术上的限制造成的,而是由预算约束。
但是,这类系统的周期成本低于仅使用Ku波段平台的周期成本,因为它需要不断依赖昂贵的商业卫星通信带宽以支持业务。
此外,所有的平台都应该考虑采用多波段视距收发器。
该策略能够为可能存在竞争的卫星资源提高另外的连接方式,提高连接的多样性和自恢复性,并能够链接到未来的地面和空中(例如,联合空中层网络(JALN))中继节点。
4.3.9 无人海洋系统通信4.3.10 频谱考虑电磁频谱是在国家和国际层面严格管控的。
开发人员应该在敲定通信系统设计之前,保持与国防部频谱办事处保持密切联系。
无人地面系统的远程遥控要求在视距和超视距条件下进行协调,进而提供对战场的态势感知和侦察。
对受限空间进行实时成像则要求大带宽。
因而,频谱的可用性是无人地面系统执行各种任务的关键。
DARPA的下一代无线网络计划表明了动态频谱接入的可行性。
基于邻近系统实际使用或未使用的某些频段,动态频谱接入能够自动调节频段。
该计划的难点在于:电子对抗下的脆弱性,与现有系统进行集成的代价,标准的开发(涉及法规方面),以及共站点的干扰。
4.3.11 波形通用数据链是所有机载有人和无人平台的国防部标准波形。
通用数据链(现有5类变体)的波形参数允许终端工作在S, C, X, Ku, 和Ka 波段。
其他的一些频段也正在考虑中(见图16)。
当前计划要求通用数据链具有点对点的能力。
近期规划中,计划加入现代密码学方案、动态自适应波形参数以及抗干扰、低截获/低检测要求。
中期规划(2019年)要求具有新的网络能力(例如,自恢复与自组织,ad-hoc网络,中断容错网络以及动态多接入网络管理)。
长期规划(2020年后)将发展基于自主策略的网络管理和认知通用数据链。
图16 可能支持的频段范围4.3.12 MIMO系统MIMO是一种成熟的技术,目前被应用在商用的第四代(4G)移动无线系统。
测试的数据传输速率高达300 Mbps。
MIMO结合了信息论、前向纠错编码、信号处理和传播理论等多项内容;因此,MIMO和空时编码的数学是非常复杂的。
MIMO使用多径传输(虽然它们不一定是独立的),每条路径以更低的数据率进行传输。
利用空时编码和容量优化来获得总体的高数据传输率。
评估良性和应力条件下的性能。
随着电子、接口设计和自适应协议等技术的发展,自组织和自修复网络将使得未来的无人机系统能够在多平台、多传感器网络中工作。
4.3.13 电磁环境效应4.3.14 光通信在无人系统通信中使用激光通信可以提高目标检测能力,提高抗干扰性能,提高稳健的LPI/LPD,并降低通信子系统之间的电磁环境干扰。